Focus Automotive
Un laboratorio mobile
per la trazione ibrida
Al Polo per la Mobilità Sostenibile di Cisterna, a Latina, è
stato progettato un sistema di controllo per la trazione di
un veicolo ibrido parallelo sulla piattaforma NI Compact Rio,
con la collaborazione di Robotronix
di Laura Rubini
S
F Il prototipo
P538H
in esposizione
al salone
del made in Italy
di Tokyo
078 ■ e chiedete di cosa si tratta a
Gian Luca Storti e Maurizio
Paschero di Pomos, loro
vi parlano prima di tutto di “un
prototipo concepito come laboratorio
mobile, che consente di sperimentare
rapidamente sul campo diversi
algoritmi di controllo della trazione
per un veicolo a propulsione ibrida,
capaci di massimizzare opportune
funzioni obiettivo come la riduzione
dei consumi di carburante e il
prolungamento della vita utile delle
batterie”. Questo prototipo e questi
algoritmi fanno parte di un progetto nome in codice P538H - attualmente
in corso di realizzazione presso il Polo
per la Mobilità Sostenibile (Pomos)
Automazione Industriale - Aprile 2012
di Cisterna di Latina, risultato
della ricerca nel campo dei veicoli
ibridi condotta da alcuni ricercatori
dell’Università di Roma La Sapienza,
che si avvalgono della collaborazione
della società Robotronix per la fase di
sviluppo della logica di controllo.
“Il prototipo di veicolo ibrido parallelo
P538H che stiamo costruendo è
costituito da un telaio space-frame in
tubolari di vario spessore e sezione in
Fe360 e da un sistema di sospensioni a
quadrilateri sovrapposti con puntone
e bilanciere, per il posizionamento
degli ammortizzatori”, spiega Storti,
illustrando i diversi componenti del
prototipo. “Il motore termico Ice
(Internal Combustion Engine) 2,2 Jts (Jet
Thrust Stoichiometric), prodotto da Alfa
Romeo, eroga 185 cv di potenza e 225
Nm di coppia a 4.500 rpm. La macchina
elettrica (Electric Machine, EM) è
di tipo brushless sincrona a magneti
permanenti, raffreddata a liquido con
22 kW di potenza nominale e 45 kW
di picco. Il sistema di accumulo che
alimenta l’EM è costituito da un pacco
batterie litio polimeri (Li-Po) di 60 celle
prodotto da Kokam, che possiede una
tensione nominale di 252 V ed è capace
di immagazzinare 6,88 kWh di energia
totale. Il caricabatterie ha una potenza
nominale di 3 kW è prodotto dalla
Zivan”. A questi elementi, si aggiungono,
come spiega Paschero, “il Battery
Management System (Bms), prodotto da
M.I.R.M.U, che supervisiona il sistema
di accumulo e lo protegge dal potenziale
danneggiamento causato da tensioni
troppo alte o troppo basse, da correnti
di scarica eccessive o da temperature di
esercizio non ottimali, e il GPX-21, un
sistema embedded prodotto da Engicam,
dotato di un display Lcd touchscreen,
usato come cruscotto digitale”. Per
lo scambio di informazioni tra tutti i
dispositivi menzionati si è ricorso a
CanBus oppure al collegamento diretto
in forma analogica o digitale.
Gestire la potenza
“Tra le problematiche più complesse
emerse in fase di realizzazione, vi sono
la progettazione e l’implementazione
del Ptm (Power Train Management) del
prototipo P538H”, prosegue Paschero.
“Il Ptm deve ripartire dinamicamente
la richiesta di coppia del guidatore tra
il propulsore elettrico e quello termico,
sulla base di opportune grandezze
acquisite ed elaborate on-line con
l’ausilio della logica Fuzzy”. Con il
supporto di Robotronix, i ricercatori del
Pomos hanno implementato il Ptm su
piattaforma CompactRio di National
Instruments, composta dallo chassis
NI-9072 e dai quattro moduli di I/O
NI-9425, NI-9476, NI-9215 e NI-9263.
Automotive Focus
La comunicazione su CanBus è effettuata
tramite convertitore RS232toCan.
Marco Pagnanelli di Robotronix
dettaglia gli aspetti del progetto che
hanno coinvolto i moduli di National
Instruments. “Tramite il modulo
NI-9215 vengono acquisiti diversi
segnali analogici di input, relativi alla
posizione del pedale dell’acceleratore
(GasPed1), alla ridondanza di GasPed1
(GasPed2), alla pressione del pedale del
freno (Brkprs) e alla velocità di rotazione
dell’EM (Tacho). Con il modulo NI-9263
sono invece attuati i seguenti segnali
analogici di output: acceleratore Ice
(IceLoad1); ridondanza di IceLoad1
(IceLoad2); acceleratore dell’EM
(EmLoad1); ridondanza di EmLoad1
(EmLoad2). Con il NI-9425 sono
acquisiti i segnali digitali di input relativi
al comando di retromarcia (Retro),
mentre con il modulo NI-9476 sono
attuati i segnali digitali di output relativi
al comando di inversione rotazione EM
(FwdtoRev). Infine, i segnali provenienti
dal CanBus, e acquisiti attraverso il
convertitore RS232toCan, riguardano i
giri motore Ice (RPM) e lo stato di carica
del pacco batterie (Soc)”.
Il progetto LabView implementato è
composto da due Virtual Instrument
(VI), uno per gestire l’Fpga denominato
‘ReadWrite’ e l’altro per gestire il
processore real-time denominato
‘MainRT’. “Il VI ReadWrite esegue
le operazioni di lettura e scrittura
sui quattro moduli di I/O e attua la
ripartizione tra Ice ed EM tramite un
parametro passato dinamicamente
dal modulo MainRT e inizializzato
a un valore di default fisso”, dettaglia
Pagnanelli. “In questo modo si
eliminano i tempi di attesa dovuti al boot
del sistema real-time e il conducente può
far partire il veicolo immediatamente. Il
VI MainRT utilizza gli ingressi passati
dal VI ReadWrite e i segnali acquisiti
tramite seriale dal CanBus per calcolare
i coefficienti di ripartizione del carico
tra Ice ed EM attraverso due controllori
di tipo Fuzzy Inference System (Fis)”.
Tali coefficienti sono poi passati al VI
ReadWrite che attua i segnali di output
IceLoad1 ed EmLoad1 calcolati nel
modo seguente:
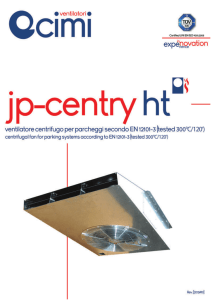
A Particolare
della
CompactRio
cablata
nel prototipo
P538H
IceLoad1=GasPed1 * Kice(Rpm, Soc,
Retro, Tacho)
EmLoad1=GasPed1 * Kem(Rpm, Soc,
Retro, Tacho)
I segnali ridondanti IceLoad2
ed EmLoad2 sono calcolati in
modo analogo. “I coefficienti
Kice(Rpm,Soc,Retro,Tacho) e
Kem(Rpm,Soc,Retro,Tacho), entrambi
compresi tra 0 e 1, sono inizializzati a
un valore costante di default durante la
fase di boot del sistema real-time e poi
calcolati dinamicamente dai controllori
Fis progettati tramite la definizione di
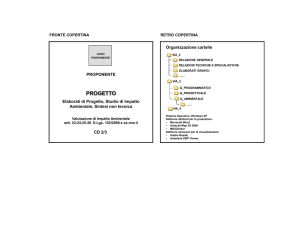
F Front panel
dell’applicazione
sviluppata
opportune regole Fuzzy e implementati
attraverso il tool Fuzzy System Designer
messo a disposizione da LabView.
I Fis sono usati per calcolare delle
mappe di Kice(Rpm,Soc,Retro,Tacho)
e di Kem(Rpm,Soc,Retro,Tacho) che
descrivono quando, e in che percentuale,
l’Ice e l’EM sono impiegati. L’Ice è usato
maggiormente quando i giri motore
Rpm sono contenuti nell’intervallo
in cui la propria efficienza è prossima
al valore massimo, oppure quando il
pacco batterie non è sufficientemente
carico per alimentare l’azionamento
elettrico. In tutti gli altri casi l’Ice è usato
moderatamente per limitare il consumo
di carburante e quindi aumentare
l’efficienza dell’intero sistema. L’EM è
dunque usato come supporto all’Ice
viene adoperato principalmente in due
situazioni. La prima, a basse velocità in
corrispondenza delle quali l’Ice lavora
in regioni di bassissima efficienza,
la seconda invece, ad alte velocità in
corrispondenza delle quali il propulsore
elettrico è utilizzato per incrementare
l’accelerazione del veicolo. Un
approccio simile è utilizzato nelle fasi di
decelerazione durante le quali la richiesta
di coppia frenate del guidatore viene
ripartita dinamicamente tra impianto
idraulico ed EM, usato in questo caso
come freno elettromagnetico. Tale
ripartizione deve essere effettuata in
modo tale da massimizzare il recupero
dell’energia cinetica del veicolo senza
pregiudicare le aspettative di frenatura
attese dal guidatore”. •
Per informazioni
National Instruments
www.ni.com/italy
Pomos
www.pomos.it
Robotronix
www.robotronix.it
Aprile 2012 - Automazione Industriale ■ 079