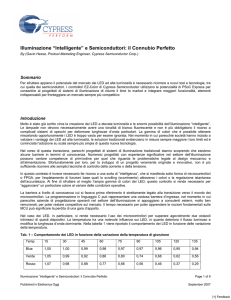
Come utilizzare l’analogica programmabile per misurare i giroscopi MEMS
By Patrick Prendergast, Applications Engineer, and Ben Kropf, Applications Engineer, Cypress Semiconductor Corp.
Sommario
Esistono numerose tecniche per rilevare la velocità angolare utilizzando un giroscopio MEMS (sistema microelettromeccanico). Un aspetto che le accomuna è che tutte sfruttano le oscillazioni di una massa vibrante, piuttosto che la
massa rotante. Una massa vibrante “resiste” ai cambiamenti cui è sottoposto il suo asse di vibrazione quando la struttura è in
rotazione. Questa rilevazione può quindi essere eseguita utilizzando, appunto, le vibrazioni invece che le rotazioni complete.
Tale operazione sarebbe infatti molto più difficile da implementare in un dispositivo MEMS.
Introduzione
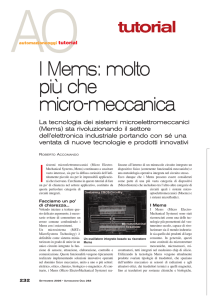
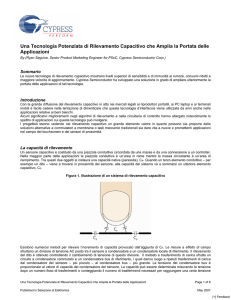
Per illustrare come funziona un giroscopio MEMS, pensiamo a una piccola massa vibrante soggetta a uno spostamento
radiale rispetto alla struttura su cui è montata. Il concetto è illustrato in Figura 1. La massa, m, si sposta inducendo una forza
Coriolis ortogonale della stessa frequenza. L’ampiezza di questa forza è pari a ±2Ωvm, cioè è direttamente proporzionale alla
velocità angolare Ω dell’intero sistema. Queste forze inducono una “spinta” sulla porzione bianca del dispositivo di figura 1: lo
spiazzamento può essere rilevato sotto forma di variazione di carica.
Figura 1: Implementazione di un giroscopio MEMS
Tutto ciò di cui necessita ora il giroscopio è una circuiteria elettronica capace di rilevare le oscillazioni di capacità, di
convertirle in tensione e di rettificare il segnale per creare un’uscita DC. Questa circuiteria traduce la velocità di rotazione in
una tensione. Alcuni produttori di giroscopi integrano tutte queste funzionalità in un unico package, assicurando così una
soluzione piccola, efficace ma costosa. Altri produttori di giroscopi MEMS tendono a realizzare prodotti meno costosi
adottando un approccio “minimalista” al trattamento del segnale, costringendo però a ricorrere a circuiterie esterne di
condizionamento e misura.
Come usare i giroscopi MEMS
I giroscopi MEMS più economici e diffusi (gyros) utilizzando la quantità di circuiteria analogica più ridotta possibile e sono
sprovvisti di circuiteria digitale. Questi gyros offrono in uscita un’impedenza relativamente alta e presentano un offset DC
elevato. Il compito di ridurre l’offset DC e di incrementare l’impedenza del circuito d’ingresso spetta quindi al progettista del
sistema.
Come utilizzare l’analogica programmabile per misurare i giroscopi MEMS
Published in Selezione di Elettronica
Page 1 of 6
February 2008
[+] Feedback
Oggi, i gyros sono utilizzati nei dispositivi consumer, per esempio nei DSC (digital still camera) per la stabilizzazione
dell’immagine, nei computer notebook per la protezione degli hard disk, e nei compassi digitali. I giroscopi stanno inoltre
ottenendo ampi consensi nelle applicazioni automotive, soprattutto negli apparati ESC (electronic stability control). Grazie ai
crescenti livelli di automazione nelle linee di assemblaggio anche la robotica consumer e industriale si è dimostrata un grosso
mercato per i giroscopi.
Circuiti di condizionamento dei segnali per la stabilizzazione dell’immagine
Nelle applicazioni di stabilizzazione delle immagini, il giroscopio aiuta a correggere le vibrazioni della mano di chi filma.
Quanto la mano dell’utente sussulta, il sensore d’immagine vibra, provocando il tremolio dell’immagine registrata. In questa
applicazione, per bilanciare le vibrazioni degli assi x e y, vengono utilizzati due giroscopi. Una circuiteria di condizionamento
del segnale e un processore misurano l’uscita del gyro e inviano un segnale di correzione che regola dinamicamente la trama
di riferimento del sensore d’immagine. La trama di riferimento può essere corretta sia spostando fisicamente il sensore sia
intervenendo sulla porzione d’immagine riportata al processore d’immagine.
Specifiche tipiche:
LPF a quattro poli: fC = 250Hz
Guadagno differenziale o sbilanciato: 100
Velocità di campionamento ADC: 1ksps/canale
Risoluzione ADC: 10 bit
Esistono numerosi circuiti in grado di soddisfare queste specifiche. La sfida è di rendere il tutto economicamente conveniente
e sufficientemente piccolo per adattarsi alle geometrie ridotte di un DSC. Anche se la circuiteria sviluppata è piccola ed
economica, essa dovrà operare ad un livello prestazionale sufficientemente alto per non sacrificare le caratteristiche di
sistema. Oltre alle specifiche, comprendere anche le funzioni aiuterà a semplificare le decisioni progettuali.
Il primo stadio della circuiteria di condizionamento del segnale è particolarmente critica in quanto l’impedenza di uscita di
alcuni giroscopi economici è moderatamente elevata. Inoltre, nelle applicazioni di stabilizzazione delle immagini, la porzione
DC del segnale non ha valore funzionale: questo è importante a causa degli aspetti legati all’offset. Il circuito in figura 2
illustra un problema di progetto comune nelle applicazioni giroscopiche sbilanciate. Il circuito d’ingresso comprende i seguenti
elementi: un gyro con una determinata impedenza di uscita (ZOUT), un condensatore di blocco DC, una resistenza collegata
alla massa analogica (AGND – utilizzata per centrare la massa del segnale d’ingresso accoppiato in AC) e un amplificatore
con riferimento al valore AGND. La regione per la quale è stato utilizzato un condensatore di blocco per la DC invece che un
filtro software deriva dal fatto che l’offset della tensione di uscita del giroscopio (fino a 100mV) viene amplificata per 100,
portando l’uscita dell’amplificatore al binario di alimentazione.
L’impedenza combinata del giroscopio e del condensatore di blocco deve essere almeno venti volte inferiore rispetto a quella
della resistenza flottante per evitare errori di misura superiori al 5%. Assumendo una ZOUT = 40k e 3.2k di reattanza
capacitiva (1 F @ 50Hz, la frequenza di interesse più bassa) si ha un’impedenza totale di 40.1k e questo richiede una
resistenza di 803k (806k 1% equivalente). Considerando che il circuito sarà alimentato solo quando la stabilizzazione
d’immagine è attiva (appena prima di acquisire un’immagine), sarà necessario tenere in considerazione il tempo di salita del
circuito RC. In questo caso assumendo che 4 o il 98% sia un tempo di salita sufficiente, il circuito sarà attivo dopo 3.2s
(equazione 1), cioè un valore inaccettabile.
Come utilizzare l’analogica programmabile per misurare i giroscopi MEMS
Published in Selezione di Elettronica
Page 2 of 6
February 2008
[+] Feedback
Figura 2: Circuito d’ingresso di un giroscopio sbilanciato
Tr = 4τ = 4 * (806kΩ + 40kΩ) *1µF = 3.2s
Equazione 1: Equazione tempo di salita
La soluzione è di aggiungere della circuiteria attiva che stabilizzi la tensione all’ingresso positivo dell’amplificatore ad AGND.
Per fare questo, l’AGND che alimenta la parte inferiore del resistore può essere sostituita da un DAC, mentre all’ingresso
positivo dell’amplificatore deve essere inserito un ADC. L’ADC, riferito ad AGND, misurerà l’errore tra l’ingresso
dell’amplificatore e AGND; se l’errore è negativo (l’ingresso dell’amplificatore è inferiore ad AGND), la tensione di uscita del
DAC viene incrementata; se l’errore è positivo, la tensione di uscita del DAC viene diminuita. Se viene utilizzato un
processore, è possibile implementare un loop di controllo software che consente di aumentare drasticamente il tempo di
risposta del sistema.
Con l’introduzione di DAC e ADC questo circuito diventa rapidamente ingestibile. Esistono alcuni dispositivi che offrono delle
soluzioni ragionevoli per l’implementazione di questo circuito. Tra questi si segnalano i prodotti delle famiglie ADuC di Analog
Devices e PSoC di Cypress. Ricorrendo a un PSoC Cypress il circuito può essere implementato come illustrato in figura 3.
Figura 3: circuiteria di startup ottimizzata
Ora che il problema del tempo di salita è stato risolto possiamo passare all’implementazione del filtro passa basso. Le
specifiche impongo un filtro a 4-poli con frequenza di taglio di 250Hz. Il filtro a 4-poli assorbe molte risorse, soprattutto
Come utilizzare l’analogica programmabile per misurare i giroscopi MEMS
Published in Selezione di Elettronica
Page 3 of 6
February 2008
[+] Feedback
considerando che è necessario provvedere a due canali identici dotati di filtri identici. Fortunatamente, gli ADC delta-sigma
(
) interni ai dispositivi mixed signal contengono generalmente filtri digitali sinc2 integrati. Nel caso del dispositivo
CY8C29466, questi filtri hanno una risposta a 2 poli con frequenza di taglio (fC) al 33% della velocità di campionamento.
Connettere in cascata un filtro passa basso (LPF) a 2-poli a capacità commutata e un ADC
garantisce la stessa risposta di
un filtro a 4 poli: questa implementazione è illustrata in figura 4.
L’ultima specifica da risolvere è legata al fatto che il segnale dal gyro deve essere amplificato di 100V/V, mentre l’amplificatore
a guadagno programmabile (PGA - programmable gain amplifier) ha un guadagno massimo di 48V/V. Per soddisfare la
specifica dei 100V/V è necessario un ulteriore stadio di amplificazione. Questo guadagno extra di 2.1V/V - o 6.44dB – può
essere implementato nell’LPF variando il valore dei condensatori di feedback nel filtro a capacità commutate. Sempre in
figura 4 sono implementate anche le circuiterie relative al guadagno.
Figura 4: implementazione filtro e guadagno
Lo step finale è la duplicazione di questo circuito in modo da permettere la misura alternata dei due canali. Ricordiamo che la
2
frequenza di taglio del filtro digitale sinc dell’ADC dipende dalla velocità di campionamento, che nelle specifiche è di 1ksps.
Con una velocità di campionamento di 1ksps/canale, la frequenza di taglio del filtro digitale è pari a 330Hz, mentre le
specifiche suggeriscono 250Hz: cosa indica questo? In pratica indica che in questa applicazione è sufficiente una risposta a 2
poli nella gamma da 250Hz a circa 400Hz, risposta che assicura un funzionamento adeguato.
La figura 5 illustra l’implementazione finale del circuito di stabilizzazione dell’immagine. Esistono altre due sezioni degne di
nota: il multiplexer analogico (mux) di fronte all’ADC e il blocco di controllo dell’attuatore. L’ADC, quando gira su un canale,
opera a oltre 10ksps. Essendo però multiplexato, la velocità di campionamento risulta in realtà tagliata di un fattore pari a sei.
Poiché l’ADC utilizza un’architettura pipelined a 2 stadi, le prime due campionature di ciascun canale non sono valide e
vengono scartate.
Figura 5: circuito completo di stabilizzazione dell’immagine
Come utilizzare l’analogica programmabile per misurare i giroscopi MEMS
Published in Selezione di Elettronica
Page 4 of 6
February 2008
[+] Feedback
Durante il funzionamento, il primo canale viene campionato tre volte: immediatamente dopo il terzo campione il mux commuta
al secondo canale per passare subito in successione nuovamente al primo canale. Il clock dell’ADC è programmato per
generare dati a 6ksps, in modo che la velocità di campionamento di ciascun canale sia pari a 1ksps.
Al tutto è stato aggiunto il circuito di controllo dell’attuatore (Figura 5). Il circuito di controllo dell’attuatore può operare
secondo due modalità
1)
2)
Generare dei segnali di controllo per pilotare due motori o
Gestire un bus di comunicazione seriale che riporta a un processore d’immagini le informazioni sulle vibrazioni
Se gli attuatori sono motori, i segnali di controllo sono riconducibili a delle modulazioni ad ampiezza d’impulso (PWM),
utilizzate per riposizionare il sensore d’immagine. Il metodo della comunicazione seriale invece sfrutta un link - di solito I2C o
SPI - per riportare al processore d’immagine le informazioni di spiazzamento del sensore rispetto alla trama originaria di
riferimento. Il processore d’immagine tiene conto dello spiazzamento dalla trama di riferimento e varia di conseguenza l’area
di cattura sul sensore d’immagine.
Nei prossimi dieci anni il mercato dei giroscopi è previsto che esploderà: questo articolo vi aiuterà a sviluppare i nuovi progetti
che emergeranno durante questo intenso periodo.
Come utilizzare l’analogica programmabile per misurare i giroscopi MEMS
Published in Selezione di Elettronica
Page 5 of 6
February 2008
[+] Feedback
References
Cypress Semiconductor
198 Champion Court
San Jose, CA 95134-1709
Phone: 408-943-2600
Fax: 408-943-4730
http://www.cypress.com
© Cypress Semiconductor Corporation, 2007. The information contained herein is subject to change without notice. Cypress Semiconductor Corporation assumes no responsibility for the
use of any circuitry other than circuitry embodied in a Cypress product. Nor does it convey or imply any license under patent or other rights. Cypress products are not warranted nor intended
to be used for medical, life support, life saving, critical control or safety applications, unless pursuant to an express written agreement with Cypress. Furthermore, Cypress does not authorize
its products for use as critical components in life-support systems where a malfunction or failure may reasonably be expected to result in significant injury to the user. The inclusion of
Cypress products in life-support systems application implies that the manufacturer assumes all risk of such use and in doing so indemnifies Cypress against all charges.
PSoC Designer™, Programmable System-on-Chip™, and PSoC Express™ are trademarks and PSoC® is a registered trademark of Cypress Semiconductor Corp. All other trademarks or
registered trademarks referenced herein are property of the respective corporations.
This Source Code (software and/or firmware) is owned by Cypress Semiconductor Corporation (Cypress) and is protected by and subject to worldwide patent protection (United States and
foreign), United States copyright laws and international treaty provisions. Cypress hereby grants to licensee a personal, non-exclusive, non-transferable license to copy, use, modify, create
derivative works of, and compile the Cypress Source Code and derivative works for the sole purpose of creating custom software and or firmware in support of licensee product to be used
only in conjunction with a Cypress integrated circuit as specified in the applicable agreement. Any reproduction, modification, translation, compilation, or representation of this Source Code
except as specified above is prohibited without the express written permission of Cypress.
Disclaimer: CYPRESS MAKES NO WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, WITH REGARD TO THIS MATERIAL, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED
WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE. Cypress reserves the right to make changes without further notice to the materials described
herein. Cypress does not assume any liability arising out of the application or use of any product or circuit described herein. Cypress does not authorize its products for use as critical
components in life-support systems where a malfunction or failure may reasonably be expected to result in significant injury to the user. The inclusion of Cypress’ product in a life-support
systems application implies that the manufacturer assumes all risk of such use and in doing so indemnifies Cypress against all charges.
Use may be limited by and subject to the applicable Cypress software license agreement.
Come utilizzare l’analogica programmabile per misurare i giroscopi MEMS
Published in Selezione di Elettronica
Page 6 of 6
February 2008
[+] Feedback