Tesine di Fondamenti di Automatica
Corsi di Laurea in Ingegneria Biomedica ed Elettronica
A.A. 2014-15
Mirco Rampazzo
[email protected]
http://automatica.dei.unipd.it/people/rampazzo/teaching.html
Regole generali
A margine del corso di Fondamenti di Automatica è prevista la presentazione facoltativa di
un elaborato. La prova viene svolta al di fuori dell’orario di lezione e può essere redatta,
anche in gruppo, fino ad un massimo di quattro studenti. Si deve scegliere una traccia
tra le due proposte. L’elaborato finale verrà valutato con un punteggio da 0 a 2 punti: 0
significa elaborato non consegnato o del tutto insufficiente, 2 elaborato soddisfacente. Criterio
principale per la valutazione è la capacita dello studente di applicare quanto appreso durante
il corso di Fondamenti di Automatica a dei casi pratici; la qualità, la modalità di presentazione
dei risultati, l’ordine e la chiarezza espositiva sono altresì valutate. L’elaborato deve essere
sintetico (indicativamente un massimo di 6 pagine) ed esauriente allo stesso tempo. Gli
elaborati (preferibilmente in bianco/nero) vanno redatti a computer ed inviati, in formato
pdf, all’indirizzo di posta elettronica [email protected] (riceverete una email di
conferma dell’avvenuta consegna). Matlab/Simulink sono richiesti: tutti i computer dei
laboratori informatici DEI ne sono provvisti.
1
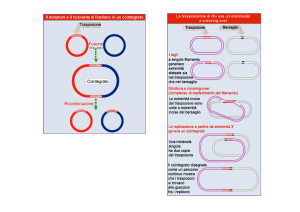
HIV
L’HIV infetta e danneggia le cellule CD4 + T (un tipo di cellule bianche del sangue) necessarie per combattere le infezioni. Quando il virus entra all’interno di una cellula T , il sistema
immunitario ne produce altre per combattere l’infezione dando l’opportunità al virus di propagarsi in modo opportunistico. Normalmente le cellule T sono prodotte con una velocità
σ e muoiono alla velocità d. Quando nel flusso sanguigno è presente l’HIV, chiamato virus
libero, questo intacca la salute delle cellule T ad una velocità β. Inoltre, questo si riproduce attraverso la moltiplicazione delle cellule T oppure autonomamente ad una velocità k.
Questi virus liberi muoiono alla velocità c mentre le cellule infette muoiono alla velocità µ,
Figura 1: HIV. Cellule in salute, virus liberi, e cellule infette.
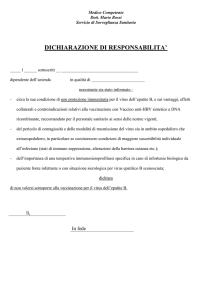
fig. 1. Un trattamento comune per l’HIV consiste nel somministrare due tipi di farmaci per
controllare la quantità di virus HIV nelle persone infette: inibitori della trascrittasi inversa
(RTI) e inibitori della proteasi (PI). La quantità da somministrare è in funzione del numero
di virus HIV presenti nel corpo, fig. 2. Un semplice modello matematico che illustra queste
interazioni nel paziente è formato dalle seguenti equazioni:
Ṫ = σ − dT − (1 − u1 )βT ν
Ṫ ∗ = (1 − u1 )βT ν − µT ∗
ν̇ = (1 − u2 )kT ∗ − cν
(1a)
(1b)
(1c)
dove T è il numero di cellule in salute, T ∗ è il numero di cellule infette, ν è il numero
di virus liberi, u1 e u2 rappresentano, rispettivamente, l’efficacia dei farmaci RTI e PI (0 ≤
u1 ≤ 1 e 0 ≤ u2 ≤ 1). I parametri sono riportati in tab. 1.
Figura 2: Sistema per controllare la quantità di virus HIV nelle persone infette. Le variabili
di ingresso sono le quantità di RTI e PI da somministrare.
Tabella 1: Parametri.
t
Tempo
d
Morte delle T cellule non infette
giorni
0.02/giorno
T∗
k
Frequenza di produzione dei virus liberi per ogni cellula
σ
Termine di origine per le T cellule non infette
10/mm3 /giorno
β
Frequenza di infezione delle particelle di virus libere
2.4 × 10−5 /mm3 /giorno
infetta
100 campioni/cellula
c
Frequenza di morte dei virus
2.4/giorno
µ
Frequenza di morte delle T ∗ cellule infette
0.24/giorno
1. Determinare i punti di equilibrio del sistema (1), per u1 = u2 = 0. Suggerimento: uno
dei punti di equilibrio è caratterizzato da un numero di virus liberi ν0 ≈ 902.7778.
2. Si definisca il vettore di stato x che ha come componenti il numero di cellule in salute,
il numero di cellule infette e il numero di virus liberi; si rappresenti quindi il sistema
(1) in forma di stato. Linearizzare il sistema intorno al punto di equilibrio ricavato
precedentemente e per il quale il numero di cellule infette e il numero di virus liberi
sono non nulli. Ricavare le matrici A, B, C, supponendo di essere interessati al numero
di virus HIV liberi come unica uscita del sistema.
ẋ = Ax + Bu
y = Cx
(2a)
(2b)
3. Si ipotizzi ora che solo i farmaci di tipo RTI siano usati come ingresso (i.e. u2 = 0); si
ricavi la funzione di trasferimento (fdt) dall’efficienza dell’RTI alla quantità di virus:
P (s) =
Y (s)
U1 (s)
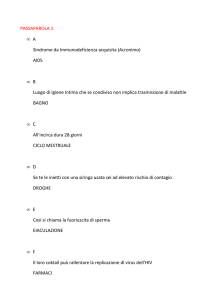
4. Data la fdt P (s) si vuole sviluppare una strategia u1 (t) per la somministrazione dei
farmaci per mantenere il numero dei virus a livello prestabilito. A tale scopo si vuole
utilizzare lo schema di controllo di fig. 3. Si verifichi che il sistema ad anello chiuso è
stabile per ogni K > 0.
Figura 3: Controllo HIV.
5. Ricavare il valore massimo di K tale che tutti i poli del sistema ad anello chiuso si
trovino sull’asse reale.
6. Per il valore di K ricavato al punto precedente, si simuli la risposta indiciale del sistema
ad anello chiuso determinando i valori di sovraelongazione percentuale, tempo di salita
e tempo di assestamento. Riportare infine l’andamento di u1 (t).
2
Aereo jet
Il pilota automatico di un aereo jet può essere usato in una delle sue modalità per controllare
la quota di volo. Per progettare la porzione dell’anello relativa al controllo di quota, è
rilevante la sola dinamica dell’aereo a lungo termine. La relazione linearizzata tra l’altezza e
l’angolo del timone di profondità per la dinamica a lungo termine è:
20(s + 0.01)
ft
h(s)
=
,
2
δ(s)
s(s + 0.01s + 0.0025)
deg
Il pilota automatico riceve dall’altimetro un segnale elettrico proporzionale alla quota.
Questo segnale è confrontato con il segnale di riferimento (proporzionale alla quota prescelta
dal pilota) e la differenza rappresenta il segnale di errore.
G(s) =
Figura 4: Jet.
Il segnale di errore viene modificato da un compensatore e poi utilizzato per comandare
l’attuatore del timone di profondità. Uno schema a blocchi de sistema è rappresentato in
figura 5. Si deve progettare tale compensatore.
1. Considerare dapprima l’impiego della sola azione proporzionale D(s) = K
(a) Usare Matlab per tracciare il diagramma di Bode del sistema ad anello aperto per
D(s) = K = 1.
(b) Quale valore di K comporta una pulsazione di attraversamento pari a 0.16 rad/s?
(c) Con tale valore di K, se chiudessimo l’anello, il sistema risulterebbe stabile?
(d) Quale è il margine di fase (PM) con tale valore di K?
(e) Tracciare il diagramma di Nyquist del sistema ed individuare accuratamente tutti
i punti nei quali la fase vale 180° o il modulo vale 1.
(f) Usare Matlab per tracciare il luogo delle radici rispetto a K e individuare le
posizioni dei poli corrispondenti ai valori di K individuati al punto 1(b).
Figura 5: Sistema di controllo.
(g) Quale sarebbe l’errore a regime se il comando fosse un cambiamento a gradino di
1000 piedi?
2. Assumere un compensatore del tipo:
D(s) = K
Ts + 1
αT s + 1
(a) Scegliere i parametri K, T e α in modo che la pulsazione di attraversamento sia
0.16 rad/s e PM risulti maggiore di 50°. Verificare il progetto sovrapponendo
il diagramma di Bode di D(s)G(s)/K al diagramma tracciato al punto 1(a) e
misurare direttamente PM.
(b) Usare Matlab per tracciare il luogo delle radici rispetto a K per il sistema che
include il compensatore progettato al punto 2(a). Individuare la posizione delle
radici corrispondenti al valore di K di cui al punto 2(a).
(c) I piloti automatici di quota posseggono anche una modalità di funzionamento nella
quale la velocità di salita è misurata direttamente e comandata dal pilota.
i. Disegnare il diagramma a blocchi per tale modalità.
ii. Calcolare la relativa G(s).
iii. Progettare D(s) in modo che il sistema abbia la stessa pulsazione di attraversamento che nella modalità “quota” e che PM risulti superiore a 50°.