")
IDENTIFICAZIONE SET MEMBERSHIP
CON DINAMICHE NON MODELLATE
Michele TARAGNA
Dipartimento di Automatica e Informatica
Politecnico di Torino
[email protected]
Scuola avanzata su
“Identificazione e controllo robusto di sistemi incerti”
Siena, 8-9 Novembre 2002
Politecnico di Torino - DAUIN
M. Taragna
Sommario
Motivazioni dell’identificazione di modelli d’incertezza dinamici.
Teoria dell’identificazione di model set.
Errori di identificazione e concetti di ottimalità.
Assunzioni su sistema e rumore e loro validazione.
Norme per misurare l’errore di identificazione: H1 , `1 , H2 .
Identificazione H1 :
–
–
–
–
metodi di validazione;
algoritmi lineari, “two-stage”, interpolatori; algoritmi ottimi e “nearly-optimal”;
modelli di incertezza di ordine ridotto;
(interazione identificazione-controllo.)
Appendice: norme, spazi di segnali e di sistemi.
Identificazione Set Membership con dinamiche non modellate
1
Politecnico di Torino - DAUIN
M. Taragna
Motivazioni
Problema: fare inferenze su un sistema dinamico reale S o a partire da informazioni
generali su esso e da N misure sperimentali corrotte da rumore
%
yN
= FN (S o) + eN
vettore delle
misure
(noto)
"
-
operatore
informazione
(noto)
rumore di
misura
(non noto)
Esempi di inferenza: - predizione delle risposte future di S o ;
- controllo delle risposte future di S o ;
- fault detection;
- diagnostica;
- :::
Identificazione Set Membership con dinamiche non modellate
2
Politecnico di Torino - DAUIN
M. Taragna
Informazione sperimentale
N campioni dell’uscita y del sistema S o , inizialmente a
riposo, cui si applica un ingresso noto u
– Misure nel tempo :
y` =
P̀
k=0
o
S
hk u` k
+ e` ;
+
operatore informazione
` = 0; : : : ; N
: FN (S ) = FN hS
2
con FN
:=
h
UN
0N 1
i
N 1 , U
2R
N
:=
6
6
6
6
6
6
4
u0
0
u1
u0
.
.
.
.
.
.
..
uN
Identificazione Set Membership con dinamiche non modellate
1
1
uN
2
.
0
0
3
7
7
7
N N
7
. 72 R
. 7
. 5
u0
3
Politecnico di Torino - DAUIN
M. Taragna
2
– Misure in frequenza: parte reale ed immaginaria di N= campioni della
risposta in frequenza del sistema S o !k , k
; : : : ; N= :
8
<
:
y2k
y2k
2
1
( ) =1
= <e (S o (!k )) + e k ;
= =m (S o (!k )) + e k ;
2
+
operatore informazione
h
k = 1; : : : ; N=2
2
2
2
1
: FN (S ) = FN hS
iT
R N 1
T(!1) T !N=2
2
3 2
3
e ((! ))
1 (! )
4
5
4
5 R 21
(!) :=
=
2 (!)
m ((! ))
h
i
(!) := 1 e j! e j2!
C 11
FN
:=
2
<
2
=
Identificazione Set Membership con dinamiche non modellate
2
4
Politecnico di Torino - DAUIN
M. Taragna
Approccio:
^
– stimare un modello M
^
– fare l’inferenza sul modello M
– calcolare l’errore di inferenza E
anziché su S o
Problemi:
(M^ ) commesso facendo l’inferenza su M^
^
(M^ )
^ che dia un “piccolo” errore E (M^ )
– cercare un modello M
^ ) per N ! 1
– analizzare il comportamento dell’errore E (M
^ ) sia “piccolo”
– progettare l’esperimento in modo che E (M
Senza fare ipotesi su S o e su eN , l’errore E (M^ ) è illimitato
– dato un modello M , calcolare l’errore E
+
quali informazioni “a priori” su S o ed eN si possono assumere?
Identificazione Set Membership con dinamiche non modellate
5
Politecnico di Torino - DAUIN
M. Taragna
Teoria dell’identificazione statistica
Ipotesi:
– S o 2 K = fMn (p) ; p 2 R n g: insieme di modelli dinamici parametrici
–
eN : rumore stocastico con d.d.p. nota, eventualmente filtrato
+
problema di stima parametrica statistica:
yN FN Mn p
eN
=
(
( )) +
Se S o 2= K , come avviene in molti casi, allora
yN
= FN (Mn (p)) + eN + dinamiche non modellate
+
come tener conto delle dinamiche non modellate?
Identificazione Set Membership con dinamiche non modellate
6
Politecnico di Torino - DAUIN
M. Taragna
Teoria dell’identificazione di model set
Ipotesi:
– S o 2 K = sottoinsieme dello spazio dei sistemi dinamici S avente una
–
eN
parametrizzazione non necessariamente finita (ad esempio,
sistemi con risposta impulsiva esponenzialmente decrescente)
2 Be = insieme limitato
Feasible Systems Set: insieme di tutti i sistemi consistenti con le ipotesi e con
i dati sperimentali (unfalsified systems set )
N
F SS K; e ; FN ; y
S K yN
B
–
–
–
:=
2 :
= FN (S ) + ~ ~ 2 Be
eN ;
eN
F SS riassume tutte e sole le informazioni sul sistema da identificare
(ipotesi su S o ed eN , dati y N )
S o 2 F SS se le ipotesi sono vere )
validare le ipotesi , controllare se F SS non è vuoto
se le ipotesi sono troppo deboli ) F SS risulta non limitato
Identificazione Set Membership con dinamiche non modellate
7
Politecnico di Torino - DAUIN
M. Taragna
Problema:
F SS non è sovente rappresentato nella forma più adatta all’uso )
si cercano insiemi di modelli che includano F SS e siano di forma opportuna
+
Model set: un insieme di modelli M S è un model set per S o se
M F SS 3 S o
Si considerano model set additivi:
n
o
M = M^ + : jjjjS M^ 2 S : modello nominale
= S o M^ : errore di modello (dinamica non modellata)
jj jjS : norma nello spazio dei sistemi dinamici S
Identificazione Set Membership con dinamiche non modellate
8
Politecnico di Torino - DAUIN
M. Taragna
Algoritmo di identificazione :
= M^
Misura dell’errore commesso facendo inferenze su M^ anziché su S o:
Æ (M^ ) = kS o M^ kS sup kS M^ kS
K; Be ; FN
N
;y
S 2F SS
tale limite superiore è il più stringente ed è limitato solo grazie alle ipotesi su S o
^
+
dato un modello M , il model set additivo più “piccolo” è
M^ = M^ + : jjjjS sup kS M^ kS
S 2F SS
Identificazione Set Membership con dinamiche non modellate
9
Politecnico di Torino - DAUIN
M. Taragna
Errore di identificazione di un algoritmo ,
^:
errore di identificazione di un model set M
N
^ ) :=
E () = E (M
sup N kS K; Be ; FN ; y kS
S 2F SS (K;Be ;FN ;y
)
^
– è il minimo errore di inferenza garantito dal modello M , identificato mediante
N
l’algoritmo che opera sulle informazioni disponibili K; e ; FN ; y
B
– non è conservativo nei confronti del rumore, ma tiene conto della sua effettiva
realizzazione verificatasi nell’esperimento preso in considerazione
Identificazione Set Membership con dinamiche non modellate
10
Politecnico di Torino - DAUIN
M. Taragna
Algoritmo e model set ottimi
i) un model set M è ottimo se minimizza l’errore di inferenza per l’attuale
N
insieme di informazioni disponibili K; Be ; FN ; y
:
N
^ ) = r K; Be ; FN ; y
E (M ) = inf E (M
^
MS
r K; Be ; FN
; yN
S
:= inf sup
K; B
S 2F SS
= raggio di informazione
N
e ; FN ; y S
ii) un algoritmo è ottimo se minimizza l’errore di inferenza per qualsiasi
N
possibile insieme di informazioni K; e ; FN ; y
:
B
N
E ( )= r K; Be ; FN ; y ;
Identificazione Set Membership con dinamiche non modellate
8 K; Be ; FN
N
;y
11
Politecnico di Torino - DAUIN
M. Taragna
– è ottimo l’algoritmo centrale
c
N
y
= M c = arg Minf2S sup kS
S 2F SS
|
)
{z
M kS
centro di Chebicheff di F SS
}
è ottimo il corrispondente model set centrale
Mc = fM c + : jjjjS rg
– in molti casi, non esistono metodi di calcolo del modello centrale M c
+
si considerano algoritmi subottimi
Identificazione Set Membership con dinamiche non modellate
12
Politecnico di Torino - DAUIN
M. Taragna
Algoritmi subottimi
* algoritmi lineari
* algoritmi non lineari a due passi, non parametrici
Helmicki-Jacobson-Nett: TAC 1991; Partington: IJC 1991;
Gu-Khargonekar: Automatica 1992, TAC 1992; : : :
* algoritmi non lineari interpolatori, non parametrici
Chen-Nett-Fan: ACC 1992, TAC 1995; Bai-Raman: ACC 1992;
Chen-Nett: CDC 1993, TAC 1995; Gu-Xiong-Zhou: S&CL 1993; : : :
* algoritmi misti parametrici - non parametrici
Wahlberg-Ljung: TAC 1992; Kosut-Boyd: TAC 1992; Younce-Rohrs: TAC 1992;
Zhou-Kimura: TAC 1995; Giarré-Milanese-Taragna: TAC 1997; : : :
Identificazione Set Membership con dinamiche non modellate
13
Politecnico di Torino - DAUIN
M. Taragna
Algoritmi subottimi
– sono computazionalmente più semplici dell’algoritmo centrale, ma richiedono
di rinunciare almeno in parte all’accuratezza nell’identificazione
– il modello nominale può non essere di forma adatta al successivo uso (ad
esempio, ordine troppo elevato, ...)
)
è opportuno trovare algoritmi che forniscano model set con modelli nominali
di ordine basso, a costo di un possibile ulteriore deterioramento della qualità
dell’identificazione
+
come si misura tale deterioramento?
Identificazione Set Membership con dinamiche non modellate
14
Politecnico di Torino - DAUIN
M. Taragna
Livello di ottimalità di un algoritmo :
un algoritmo è -ottimo se 9 2 R tale che
N
N
N
E K;Be ;FN ;y
r K;Be ;FN ;y ; 8 K;Be ;FN ;y
– misura la qualità dell’algoritmo rispetto all’algoritmo ottimo nel caso pessimo,
considerando ogni possibile informazione (ipotesi e dati)
2
– gli algoritmi non lineari interpolatori sono -ottimi per qualsiasi norma e per
tale motivo sono detti “almost optimal”
Identificazione Set Membership con dinamiche non modellate
15
Politecnico di Torino - DAUIN
M. Taragna
Livello di ottimalità di un model set M^ :
.
^ ) = E (M^ ) r 1
(M
– misura la qualità reale del model set identificato rispetto a quello ottimo,
considerando le sole informazioni disponibili (ipotesi e dati)
– la valutazione esatta di (M^ ) è difficoltosa, poiché il calcolo di E (M^ ) ed r
è in generale un problema di complessa soluzione
Identificazione Set Membership con dinamiche non modellate
16
Politecnico di Torino - DAUIN
M. Taragna
Convergenza:
un algoritmo è detto convergente se
lim
E () = 0
N !1
Be !;
Convergenza robusta:
un algoritmo è detto robustamente convergente se è convergente
indipendentemente dalle informazioni a priori sul sistema e sul rumore.
Identificazione Set Membership con dinamiche non modellate
17
Politecnico di Torino - DAUIN
M. Taragna
Classificazione
Norma jj jjS che misura l’errore di identificazione
W
1
kS (z)k1 := sup W (!)S (!) ) identificazione H1
0! 2
P1
kS (z)k1 := q k= 1 hSk ) identificazione `1
2
P1
hS kS (z)k2 :=
) identificazione H2
k= 1 k
Informazione “a priori” sul rumore di misura eN
N
N
N
N
W
e 2 Be; 1 := e~ 2 R : jjAe~ jj1e "
N
N
N
N
e 2 Be; 2 := e~ 2 R : jje~ jj2 "
Be; 1 è più adatto a caratterizzare deterministicamente il rumore di misura,
in modo simile a quanto avviene con l’identificazione statistica
Identificazione Set Membership con dinamiche non modellate
18
Politecnico di Torino - DAUIN
M. Taragna
Informazione “a priori” sul sistema S o
S : spazio di Banach dei sistemi dinamici SISO, a tempo discreto, causali, LTI,
BIBO-stabili, eventualmente a parametri distribuiti, con
S 1
h
:= k k : risposta impulsiva di S 2 S
1 S k
P
S (z ) := hk z : funzione di trasferimento di S (o -trasformata di hS )
k
S o 2 H1 (D ) : sistema reale da identificare, parzialmente noto, con
hS
=0
=0
H1 (D ) :=
f :D
! C j f analitica in D ; kf k1 := ess sup jf (z)j < 1
z 2D
f 2 C : jzj < 1g : cerchio unitario aperto
D := z
Identificazione Set Membership con dinamiche non modellate
19
Politecnico di Torino - DAUIN
1.
M. Taragna
S o è un sistema esponenzialmente stabile, avente un guadagno stazionario
massimo noto M > 0 a fronte di un ingresso k ei!k , con > 1:
(1)
S o 2 K;M
:= fS 2 H1 (D ) : S (z) 2 H;M (D )g
( ):=
;M D
H
(
f :D
D
:=
!
z
f
C
2
j
C
f
:
analitica in D ;
z
j j f k1;
k
:= sup f (z)
)
z 2D j
j
M
g : cerchio chiuso di raggio [Helmicki-Jacobson-Nett: TAC ’91; Partington: IJC ’91; Gu-Khargonekar: TAC ’92;
Gu-Xiong-Zhou: SCL ’93; Chen-Nett-Fan: TAC ’95; : : :]
2.
S o è un sistema esponenzialmente stabile, con un inviluppo M k della
risposta impulsiva, con M > 0 e > 1 costanti note:
S
(2)
o
k
S 2 K;M := S 2 H1 (D ) : hk M ; 8k 0
[Giarré-Milanese-Taragna: TAC ’97; Milanese-Taragna: TAC ’02; : : :]
Identificazione Set Membership con dinamiche non modellate
20
Politecnico di Torino - DAUIN
3.
M. Taragna
S o ha un limite superiore noto > 0 del modulo della derivata della funzione
di trasferimento:
So
2 K
(3)
:= S 2 H (D ) : sup
1
z 2D
dS z
dz
( ) [Glaum-Lin-Zames: CDC ’96]
4.
S o ha un limite superiore noto > 0 del modulo della parte reale e della
parte immaginaria della derivata della funzione di trasferimento:
So
2 K
(
(4)
=: S 2 H1 (D ) :
sup
!2[0;2]
dSR=I
d!
(! ) )
[Milanese-Novara-Taragna: ECC ’01]
K;M
(1)
.
K;M K K ; con = M ( 1)2
(2)
(3)
Identificazione Set Membership con dinamiche non modellate
(4)
21
Politecnico di Torino - DAUIN
Identificazione
H1
M. Taragna
Norma jj jjS che misura l’errore di identificazione
W
1
jj S jjS = kS (z)k1 = sup W (!)S (!)
!2
0
W
1
(!) : funzione peso opportunamente scelta in base all’uso del modello
(ad esempio, per il controllo robusto H1 )
Identificazione Set Membership con dinamiche non modellate
22
Politecnico di Torino - DAUIN
M. Taragna
Algoritmi lineari
Gli algoritmi lineari operano linearmente sui dati sperimentali.
Gli algoritmi lineari hanno una struttura estremamente semplice, essendo
algoritmi dei minimi quadrati eventualmente pesati.
Gli algoritmi lineari sono classificabili in due categorie:
– gli algoritmi lineari “untuned”
– gli algoritmi lineari “tuned”
a seconda che siano indipendenti o no dalle informazioni a priori disponibili sul
sistema e sul rumore.
Le limitazioni degli algoritmi lineari giustificano lo studio dei più sofisticati
algoritmi non lineari.
Identificazione Set Membership con dinamiche non modellate
23
Politecnico di Torino - DAUIN
M. Taragna
Limitazioni fondamentali degli algoritmi lineari
Nel caso dell’identificazione H1 non esistono algoritmi lineari -ottimi per
nessun valore di comunque grande.
Non esistono algoritmi lineari che siano robustamente convergenti, a causa
sostanzialmente della non limitatezza dell’operatore di proiezione utilizzato.
Per garantire almeno la convergenza, un algoritmo lineare deve essere “tuned”,
cioè deve tener conto in modo esplicito dell’informazione a priori disponibile
Identificazione Set Membership con dinamiche non modellate
24
Politecnico di Torino - DAUIN
M. Taragna
Algoritmo lineare “tuned” nel caso di misure in frequenza, assumendo che
(1)
il sistema S o
K;M
, con > ed M
l’errore eN
ed A
We IN N
e;1 , con "
n
X1
M z
qk z k
k=0
2
3
dove
N
ck y
6
7
q
qk 4 5
2
n
"+M
2k
M
essendo ck y N i coefficienti della DFT inversa di y N
2
2B
0
1
=
0
=
^ ( )=
=[ ]=
ck y
N
1+
NP
1
=N
Identificazione Set Membership con dinamiche non modellate
1
i=0
yi ej 2=N
ik
25
Politecnico di Torino - DAUIN
M. Taragna
Algoritmi non lineari “two-stage”
Per ovviare alle limitazioni di convergenza degli algoritmi lineari, si cercano
algoritmi non lineari “untuned” che realizzano la seguente procedura a due passi:
^ 2 L1 con
– passo 1: si costruisce un modello preliminare non causale M (0)
un algoritmo lineare “untuned” che opera una interpolazione bilatera
M^ (0) (z ) =
dove
nP1
k= n+1
wk;n ck (y) z k
fwk;n g è una sequenza di pesi detta window
– passo 2: si sceglie il modello identificato come la miglior approssimazione in
H1 (D ) di M^ (0) (problema di approssimazione non lineare di Nehari)
M^ (z ) = arg min kM^ (0) M k1
M 2H1 (D )
Identificazione Set Membership con dinamiche non modellate
26
Politecnico di Torino - DAUIN
M. Taragna
Gli algoritmi two-stage proposti differiscono nel passo 1:
Algoritmo non lineare “two-stage” #1:
passo 1: approssimazione mediante spline lineari e troncamento.
Algoritmo non lineare “two-stage” #2:
passo 1: approssimazione con sequenze di pesi fwk;n g simmetriche pari
rispetto a k (es. finestre triangolari, sinc, cos, trapezoidali), troncate per k
Identificazione Set Membership con dinamiche non modellate
n.
27
Politecnico di Torino - DAUIN
M. Taragna
Proprietà e limitazioni degli algoritmi non lineari “two-stage”
Sono robustamente convergenti se la sequenza di pesi fwk;n g è indipendente
dalle informazioni a priori.
L’errore di identificazione e l’ordine del modello identificato dipendono dal tipo di
window utilizzata.
Mantengono una struttura ancora relativamente semplice.
Il loro livello di ottimalità non è noto.
Il modello identificato può non appartenere all’insieme F SS dei sistemi
consistenti con tutte le informazioni sul sistema da identificare.
Identificazione Set Membership con dinamiche non modellate
28
Politecnico di Torino - DAUIN
M. Taragna
Algoritmi interpolatori
Forniscono modelli identificati che appartengono all’F SS :
I
N
K;Be ;FN ;y = M^ I 2 F SS
Sono algoritmi non lineari e “tuned”.
Sono in grado di interpolare in modo approssimato i dati sperimentali, tenendo
esplicitamente conto delle informazioni a priori disponibili.
Realizzano in generale una procedura a due passi:
– passo 1: validazione delle informazioni a priori
^ 2 F SS mediante tecniche di
– passo 2: costruzione di un modello M I
interpolazione non lineare
Identificazione Set Membership con dinamiche non modellate
29
Politecnico di Torino - DAUIN
M. Taragna
Problema della validazione:
date le informazioni a priori ed i dati sperimentali, F SS è vuoto oppure no?
Risultato #1 (interpolazione di Nevanlinna-Pick, per misure in frequenza).
Le informazione a priori
(1)
sul sistema: S o
K;M
, con sull’errore: eN
e;1 , con "
> 1 ed M 0
0 ed A = We = IN N
sono consistenti con il vettore dei dati sperimentali y N 2 C N (cioè F SS 6= ;)
se e solo se esiste un vettore N 2 Be;1 tale che la matrice di Pick:
"
#
2
1
1
=M (yi i ) yj j
PN :=
1 (1 2 ) zi zj
sia definita nonnegativa, ossia PN 0.
2
2B
Identificazione Set Membership con dinamiche non modellate
30
Politecnico di Torino - DAUIN
M. Taragna
Tale problema di consistenza è riscrivibile in forma di LMI ed è risolvibile se e solo se
esiste un vettore N
e;1 tale che:
2B
2
A
con Dy
Q :=
h
N
:=
Q
6
4
1 (Dy
M
D )
H
1 (Dy
M
Q
D )
1
3
7
5
0
:= diag (y ;iy ; ; yN ), D := diag ( ; ; ; N ) e
0
1 (1
1
1
0
1
1
1
2 )zi z j .
[Chen-Nett-Fan, TAC 1995]
Identificazione Set Membership con dinamiche non modellate
31
Politecnico di Torino - DAUIN
M. Taragna
Algoritmo interpolatorio per dati in frequenza:
Passo 1: si trova la soluzione N = del problema di consistenza costituito
dal precedente LMI, tale che
"
1
PN =
2
1=M (yi i) yj
1 (1 ) zi zj
2
#
j
0
Passo 2: applicando l’algoritmo di Pick, si costruisce una funzione che interpoli in
~ := yN + N e la si usa come modello identificato.
modo approssimato y N
L’algoritmo interpolatorio è molto oneroso da un punto di vista computazionale
qualora il numero di dati sia elevato.
La matrice di Pick può facilmente risultare mal condizionata.
Identificazione Set Membership con dinamiche non modellate
32
Politecnico di Torino - DAUIN
M. Taragna
Risultato #2 (interpolazione di Carathéodory-Fejér, per misure nel tempo).
Le informazione a priori
(1)
sul sistema: S o 2 K;M
, con > 1 ed M 0
sull’errore: eN 2 Be;1 , con " 0 ed A = We = IN N
sono consistenti con il vettore dei dati sperimentali y N 2 R N (cioè F SS 6= ;)
se e solo se esiste un vettore N 2 Be;1 tale che:
(Ty T )T D (Ty T ) M TuT D Tu
N
con D := diag 1; ; ; e Tu , Ty e T pari alle matrici di Toeplitz
2
2
2
1
triangolari inferiori associate rispettivamente ad uN , y N ed N .
Identificazione Set Membership con dinamiche non modellate
33
Politecnico di Torino - DAUIN
M. Taragna
Tale problema di consistenza è riscrivibile in forma di LMI ed è risolvibile se e solo se
esiste un vettore N
e;1 tale che:
2B
A N
2
:= 4
TuT D2 Tu
(Ty T )
(Ty
T )T
M 2 D 2
3
5
0
Avendo a disposizione la soluzione di tale LMI, si può ricavare un modello
interpolatorio utilizzando la procedura di Carathéodory-Fejér.
[Chen-Nett, TAC 1995]
Identificazione Set Membership con dinamiche non modellate
34
Politecnico di Torino - DAUIN
M. Taragna
Algoritmo interpolatorio per dati nel tempo
Passo 1: si trova la soluzione N = 2 Be;1 del problema di consistenza
costituito dal precedente LMI.
N
Se A > , stop; altrimenti, si calcola la matrice
0
H :=
1
M
D (Ty
2
6
6
6
1
1
T ) Tu D = 6
6
6
4
h0
0
h1
h0
.
.
.
.
.
.
hN
1
hN
..
2
.
0
0
.
.
.
3
7
7
7
7
7
7
5
h0
Passo 2: si sceglie un intero n N e si prende come modello identificato:
M^ (z ) := M
nP1
k=0
Identificazione Set Membership con dinamiche non modellate
1
2(k
k
n)
hk z k
35
Politecnico di Torino - DAUIN
M. Taragna
Proprietà degli algoritmi interpolatori
Sono convergenti, ma non robustamente.
Sono 2-ottimi e per tale motivo sono detti “almost optimal”.
Limitazioni fondamentali degli algoritmi interpolatori
I modelli ottenuti sono di ordine elevato.
I
Sono noti solo limiti superiori sull’errore di identificazione: E < B .
Malgrado i precedenti algoritmi interpolatori siano 2-ottimali, tali limiti superiori
sull’errore di identificazione possono rivelarsi poco stringenti, e in particolare può
risultare che B=r
2.
Si possono ricavare modelli ridotti, dei quali però non è noto il livello di ottimalità.
Identificazione Set Membership con dinamiche non modellate
36
Politecnico di Torino - DAUIN
M. Taragna
Algoritmo interpolatorio “nearly-optimal” per dati nel tempo e/o in frequenza
Ad ogni sistema appartenente all’F SS corrisponde una funzione di trasferimento
ammissibile, rappresentabile sul piano polare (o R 2 ) per ogni !
Value set V (!): 8fissata ! 2 [0; 22],
V (! ) :=
Proprietà:
<
v
:
2R
()
2
:v =4
<e (S (!))
=m (S (!))
9
=
3
5;
S
2 F SS ; R 2
8
– V ! è un politopo, convesso e limitato !
– centro di Chebicheff c2 V ! in norma euclidea:
[ ( )]
c2 [V (! )] = arg inf
sup
2
2
s R2 v V (!)
– raggio di Chebicheff
jjs
v
r2 [V (!)] in norma euclidea:
r2 [V (! )] = inf
2
sup
2
s R2 v V (!)
Identificazione Set Membership con dinamiche non modellate
2 [0; 2] )
jjs
v
jj2
jj2
37
Politecnico di Torino - DAUIN
M. Taragna
Problemi:
è impossibile descrivere esattamente V (!)
è irrealizzabile il calcolo esatto di c2 [V (!)] e r2 [V (!)]
+
si calcolano approssimazioni convergenti di V
di due politopi in R 2 con m vertici:
– il politopo V Om ! , con vertici vk ! , k
– il politopo V I m ! , con vertici vk ! , k
()
()
(!), basate sulla costruzione
( ) =1; : : : ; m, “contiene” V (!)
( ) =1; : : : ; m, è contenuto in V (!)
tali politopi si ricavano mediante tecniche di programmazione lineare.
Identificazione Set Membership con dinamiche non modellate
38
Politecnico di Torino - DAUIN
M. Taragna
Risultato #1: convergenza delle approssimazioni di V
(!)
[Milanese-Taragna, TAC 2002]
Sia V Om (! ) :=
Fissati s
2<
2
2 Z ed m 2 Z ,
:s=s+s
~; s
2
V O m (! ) ;
ks~k2 L
Æ , Æ :=
.
1
(!)
(!) V (!) r [V I m (!)] r [V (!)] r [V Om (!)] r [V Om (!)] + Æ
n
o
lim
r
[
V
I
lim!1 r [V Om (!)] + Æ = r [V (!)]
m (! )] = ;m
;m!1
V
O
(
!
)]
=
c
[
V
(
!
)]
lim
c
[
V
I
(
!
)]
=
lim
c
[
m
m
;m!1
;m!1
V Om
V I m
2
2
2
2
2
2
2
Identificazione Set Membership con dinamiche non modellate
2
2
2
39
Politecnico di Torino - DAUIN
M. Taragna
Risultato 2: calcolo dell’errore di identificazione E
(M^ )
[Milanese-Taragna, TAC 2002]
^
2 Z ed m 2 Z :
^
^
^
E m (M) E (M) E m (M)
^
^
^)
lim
(
M
)
=
E
(
M
E
(
M
)
=
lim
E
m
m
;m!1
;m!1
Dato un modello M , fissati ^)
E m (M
=
^
E m (M) =
vk
0! 2 k=1;:::;m vk
sup
sup
!2
0
max
max
k ;:::;m
=1
Identificazione Set Membership con dinamiche non modellate
2
(V I m (!)) M^ (!)
(V Om (!)) M^ (!) + Æ
2
40
Politecnico di Torino - DAUIN
M. Taragna
Risultato 3: calcolo del livello di ottimalità (M^ )
[Milanese-Taragna, TAC 2002]
M^ , fissati 2 Z ed m 2 Z :
^ ) (M^ ) m(M^ )
m (M
(M
(M
^
^ ) = (M^ ):
)
=
lim
lim
m
m
;m!1
;m!1
Dato un model set
.
^
^
(M) = max 1; E m(M) sup r [V Om (!)] + Æ
! .
^
^
m (M) = E m (M) sup r [V I m (!)] :
m
0
!2
0
Identificazione Set Membership con dinamiche non modellate
2
2
2
41
Politecnico di Torino - DAUIN
M. Taragna
Algoritmo interpolatorio “nearly optimal”
()
Conoscendo i centri ed i raggi dei value set V ! su di un insieme di frequenze, si
no che approssima il model set centrale
c
calcola un model set “nearly optimal”
M^
M^
il modello nominale M^ no è soluzione di un problema di programmazione lineare
p
no
N
no
l’algoritmo y = M^ è 2-ottimo
il modello nominale ottenuto è però tipicamente di ordine elevato
+
model set aventi modelli nominali di ordine ridotto si possono ricavare mediante
riduzione d’ordine del model set “nearly optimal”
Identificazione Set Membership con dinamiche non modellate
42
Politecnico di Torino - DAUIN
M. Taragna
Model set di ordine ridotto
Model set aventi modelli nominali di ordine ridotto si possono ricavare mediante
riduzione d’ordine del model set “nearly optimal”
+
riduzione d’ordine di model set con inclusione minima e calcolo dell’-ottimalità
+
scelta dell’ordine del model set come bilanciamento fra il livello di ottimalità e la
complessità del model set
Identificazione Set Membership con dinamiche non modellate
43
Politecnico di Torino - DAUIN
M. Taragna
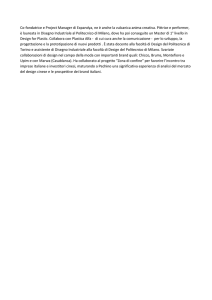
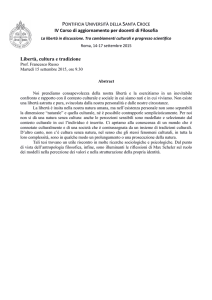
Esempio numerico
N = 1100 campioni della risposta del sistema
z + 0:5z 2
2:2z + 2:42z 2
1:87z 3 + 0:7225z 4
o
S (z ) =
1
ad un ingresso di tipo PRBS di ampiezza unitaria
1.5
40
Uscita y del sistema So
Ingresso u del sistema S
o
30
1
0.5
0
−0.5
20
10
0
−10
−20
−1
−30
−1.5
0
100
200
300
400
500
600
700
800
900
1000
Tempo k
Identificazione Set Membership con dinamiche non modellate
1100
−40
0
100
200
300
400
500
600
700
800
900
1000
1100
Tempo k
44
Politecnico di Torino - DAUIN
M. Taragna
(2)
Informazione “a priori” sul sistema: S o 2 K;M
, con: M = 6, = 1=0:93
Informazione “a priori” sul rumore: eN 2 Be;1 , con " = 4, A = We = IN N
(M; ; ") validati secondo [Milanese-Taragna: SYSID ’00]
Identificazione Set Membership con dinamiche non modellate
45
Politecnico di Torino - DAUIN
M. Taragna
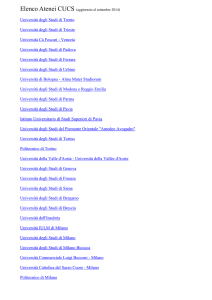
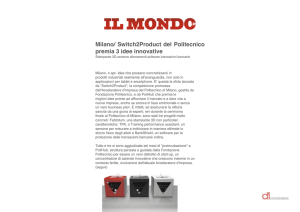
Value set V (!) : calcolati in 500 valori di ! equispaziati in [0; ], con = 150, m = 16
o
Centri di Chebicheff (rosso), relativi value set (verde) e sistema S (blu)
10
5
0
Asse immaginario
−5
−10
−15
−20
−25
−30
−35
−15
−10
−5
0
5
10
Asse reale
Identificazione Set Membership con dinamiche non modellate
15
20
25
30
46
Politecnico di Torino - DAUIN
M. Taragna
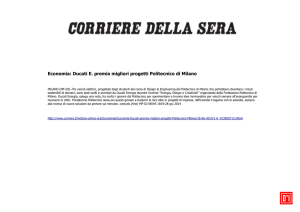
Model set “centrale” ottenuto considerando:
– come modello nominale, i centri di Chebicheff dei value set
– come perturbazione, i raggi di Chebicheff dei value set
o
Centri di Chebicheff (rosso), relativo model set (verde) e sistema S (blu)
40
38
36
34
32
30
28
26
Modulo
24
22
20
18
16
14
12
10
8
6
4
2
0
0
0.5
1
1.5
Frequenza in rad/s
Identificazione Set Membership con dinamiche non modellate
2
2.5
3
47
Politecnico di Torino - DAUIN
M. Taragna
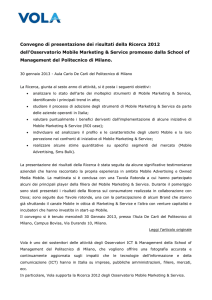
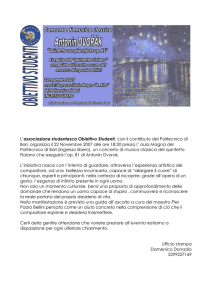
Modelli nominali e corrispondenti model set utilizzati:
^
no di ordine 150 ottenuto mediante l’algoritmo “nearly optimal” a partire dai raggi e dai
1) FIR M150
centri di Chebicheff dei value set V
Model set
(!) calcolati su 500 valori di ! equispaziati in [0; ]
no
M150
(verde), modello nominale M no (rosso) e sistema So (blu)
150
40
38
36
34
32
30
28
26
Modulo
24
22
20
18
16
14
12
10
8
6
4
2
0
0
0.5
1
1.5
Frequenza in rad/s
Identificazione Set Membership con dinamiche non modellate
2
2.5
3
48
Politecnico di Torino - DAUIN
M. Taragna
^
no di ordine
2) approssimazioni di M150
2 5 (M^ 2 M^ 5 ) ottenute con i metodi di riduzione del modello
disponibili in M ATLAB (approssimazioni ottime della norma di Hankel, troncamento bilanciato)
M2 (verde), modello nominale M2 (rosso) e sistema So (blu)
Model set
40
40
38
38
36
36
34
34
32
32
30
30
28
28
26
26
24
24
22
22
Modulo
Modulo
Model set
20
18
20
18
16
16
14
14
12
12
10
10
8
8
6
6
4
4
2
2
0
0
0.5
1
1.5
Frequenza in rad/s
model set
2
2.5
3
M^ 2
Identificazione Set Membership con dinamiche non modellate
M3 (verde), modello nominale M3 (rosso) e sistema So (blu)
0
0
0.5
1
1.5
Frequenza in rad/s
model set
2
2.5
3
M^ 3
49
Politecnico di Torino - DAUIN
M. Taragna
^
no di ordine
2) approssimazioni di M150
2 5 (M^ 2 M^ 5 ) ottenute con i metodi di riduzione del modello
disponibili in M ATLAB (approssimazioni ottime della norma di Hankel, troncamento bilanciato)
M4 (verde), modello nominale M4 (rosso) e sistema So (blu)
Model set
40
40
38
38
36
36
34
34
32
32
30
30
28
28
26
26
24
24
22
22
Modulo
Modulo
Model set
20
18
20
18
16
16
14
14
12
12
10
10
8
8
6
6
4
4
2
2
0
0
0.5
1
1.5
Frequenza in rad/s
model set
2
2.5
3
M^ 4
Identificazione Set Membership con dinamiche non modellate
M5 (verde), modello nominale M5 (rosso) e sistema So (blu)
0
0
0.5
1
1.5
Frequenza in rad/s
model set
2
2.5
3
M^ 5
50
Politecnico di Torino - DAUIN
M. Taragna
Errori di identificazione e
livelli di ottimalità dei model set identificati
M^ E (M^ ) E (M^ ) m (M^ ) m (M^ )
M^ no
3:57 3:61
1:00
1:04
150
1:77
1:87
M^ 2 6:49 6:52
M^ 3 5:31 5:34
1:45
1:53
M^ 4 3:48 3:49
1:00
1:01
M^ 5 3:48 3:49
1:00
1:01
M
Limiti sull’errore E ( ^ ) proposti in [Chen-Nett, TAC 95]:
Identificazione Set Membership con dinamiche non modellate
8
< E (M
^ ) < 167:43
: E (M
^ ) < 16:99
(Th. 4.2)
(Th. 4.3)
51
Politecnico di Torino - DAUIN
M. Taragna
Riferimenti bibliografici
1 Approach. New York: John Wiley & Sons, Inc., 2000.
J. Chen, C. N. Nett e M. K. H. Fan, “Worst case system identification in H1 : validation of a priori information, essentially
J. Chen e G. Gu, Control-Oriented System Identification: An H
optimal algorithms, and error bounds,” IEEE Transactions on Automatic Control, vol. AC-40, no. 7, pp. 1260–1265, 1995.
A. Garulli, A. Tesi e A. Vicino, eds., Robustness in Identification and Control, vol. 245 of Lecture Notes in Control and
Information Sciences. Godalming, UK: Springer-Verlag, 1999.
1 robust control,” International Journal of
L. Giarré e M. Milanese, “SM identification of approximating models for H
Robust and Nonlinear Control, vol. 9, pp. 319–332, 1999.
1 identification and model quality evaluation,” IEEE Transactions on Automatic
L. Giarré, M. Milanese e M. Taragna, “H
Control, vol. AC-42, no. 2, pp. 188–199, 1997.
1 approximation by systems of prescribed order using frequency response
M. Glaum, L. Lin e G. Zames, “Optimal H
data,” in Proc. of the 35th IEEE Conference on Decision and Control, (Kobe, Japan), pp. 2318–2321, 1996.
1 ,” Automatica, vol. 28, no. 2, pp. 299–312, 1992.
G. Gu e P. P. Khargonekar, “A class of algorithms for identification in H
1 using Pick’s interpolation,” Systems & Control Letters, vol. 20,
G. Gu, D. Xiong e K. Zhou, “Identification in H
pp. 263–272, 1993.
Identificazione Set Membership con dinamiche non modellate
52
Politecnico di Torino - DAUIN
M. Taragna
A. J. Helmicki, C. A. Jacobson e C. N. Nett, “Control oriented system identification: a worst-case/deterministic approach in
H1 ,”
IEEE Transactions on Automatic Control, vol. AC-36, no. 10, pp. 1163–1176, 1991.
M. Milanese, J. Norton, H. Piet-Lahanier e É. Walter, eds., Bounding Approaches to System Identification. New York:
Plenum Press, 1996.
1 identification from frequency-domain data,” in Proc.
M. Milanese, C. Novara e M. Taragna, ““Fast” Set Membership H
of European Control Conference ECC 2001, (Porto, Portugal), pp. 1698–1703, 2001.
1 identification,” IEEE
M. Milanese e M. Taragna, “Optimality, approximation, and complexity in Set Membership H
Transactions on Automatic Control, vol. AC-47, no. 10, pp. 1682-1690, 2002.
1 identification,” in Proc. of the European Control
M. Milanese e M. Taragna, “Nearly optimal model sets in H
Conference 2001, (Porto, Portugal), pp. 1704–1709, 2001.
M. Milanese e A. Vicino, “Optimal estimation theory for dynamic systems with set membership uncertainty: an overview,”
Automatica, vol. 27, no. 6, pp. 997–1009, 1991.
B. Ninness e G. C. Goodwin, “Estimation of model quality,” Automatica, vol. 31, no. 12, pp. 1771–1797, 1995.
J. R. Partington, Interpolation, Identification, and Sampling, vol. 17 of London Mathematical Society Monographs New
Series. New York: Clarendon Press - Oxford, 1997.
T. Zhou e H. Kimura, “Structure of model uncertainty for a weakly corrupted plant,” IEEE Transactions on Automatic
Control, vol. AC-40, no. 4, pp. 639–655, 1995.
Identificazione Set Membership con dinamiche non modellate
53
")