1
Acceleratori Di Particelle
ACCELERATORI DI PARTICELLE ............................................................................................1
Premessa...........................................................................................................................2
Caratteristiche generali ............................................................................................2
Acceleratori a tensione continua ......................................................................................3
Acceleratore di Cockcroft - Walton .........................................................................3
Acceleratore di Van de Graff ...................................................................................4
Tandem Van de Graff ..............................................................................................4
Acceleratori lineari...........................................................................................................4
LINAC .....................................................................................................................4
Principio di stabilità di fase......................................................................................5
Acceleratori circolari........................................................................................................6
Ciclotrone.................................................................................................................6
Stabilità trasversale – Focalizzazione ......................................................................8
Oscillazioni di Betatrone..........................................................................................9
Betatrone ................................................................................................................10
Sincrotrone .............................................................................................................11
Radiazione di Sincrotrone......................................................................................12
Oscillazioni di Sincrotrone.....................................................................................12
Collisionatori..................................................................................................................13
Luminosità .............................................................................................................13
LHC........................................................................................................................14
2
Premessa
Caratteristiche generali
Gli acceleratori di particelle sfruttano in vario modo campi EM per accelerare particelle che
vengono, in seguito, fatte collidere tra di loro o su di un bersaglio. A causa del tipo di campo usato,
gli acceleratori sono in grado di accelerare solo particelle cariche. Sin dai primi tubi a vuoto è
apparsa chiara la richiesta di energie sempre maggiori (KeV…MeV…GeV…TeV…) alle quale si
correlano il maggior costo e le maggiori dimensioni. Ciò ha portato all’evoluzione degli acceleratori
a bersaglio fisso in collider; valga per tutti l’esempio di LHC (14TeV, R=4.3 Km). La causa prima
queste richieste risiede nella relazione di De Broglie
h
λ=
p
per sondare l’atomo o il nucleo qualche MeV è sufficiente, per sondare il protone servono i GeV!
Oltre che nella fisica delle particelle i moderni acceleratori sono utilizzati in moltissimi altri campi:
- Scienze dei materiali
- Diagnostica e cura medica
- Processi di sterilizzazioni
- Ecc.
Le principali caratteristiche a cui siamo interessati sono:
- Tipo di particella
- Energia utile per i processi
- Sorgente di ioni
- Intensità del fascio
- Fattore di utilizzo
- Tubo a vuoto (10-6-10-12 Torr per circa 1 s)
- Campi EM (accelerazione e guida del fascio)
- Sistema di focalizzazione
Analizziamole più nel dettaglio:
- E’ importante sapere con che particella abbiamo a che fare poiché se la sua vita media è
troppo piccola, decadrà ancor prima di aver colliso con le altre particelle. Per i moderni
acceleratori va bene una vita media superiore ai 2 µs (vita media del muone).
-
⇒
⇒
Si intende l’energia del CM, per 2 particelle di quadrimpulso p1 e p 2 si ha
⇒
⇒ 2
s = p1 + p 2
r r
= m12 + m22 + 2 E1 E 2 − 2 p1 p 2
se nel sistema del LAB il bersaglio è fermo ed il proiettile è in moto s si riduce a
s = m12 + m22 + 2 E1 m2
dove se E1 è molto maggiore delle due masse si ha
s ≅ 2 E1 m2
poiché
p ² = E ² − m²
se consideriamo invece due fasci collidenti otteniamo
s ≅ 4 E1 E 2
per cui l’energia richiesta da un collider è circa il 10% di quella richiesta da un acceleratore
a bersaglio fisso per ottenere la stessa s. E’ proprio per questo che anche a SLAC si è avuta
3
-
-
-
-
-
una parziale modifica del noto LINAC in questo senso con la creazione di SLC – Stanford
Linear Collider.
Per ottenere gli elettroni si utilizza il classico filamento caldo, per gli ioni ci sono svariati
sistemi di tubi a scarica. Ad esempio per ottenere protoni si mandano degli elettroni in un
volume contente idrogeno, che ha un’alta probabilità di essere ionizzato dagli elettroni. Si
crea così un plasma di e- e p dal quale questi ultimi vengono estratti grazie a degli elettrodi.
L’intensità del fascio è definita come #particelle/time unit, il fascio può essere di due tipi:
continuo o pulsato; nel secondo caso si parla di bunch (nel primo corrente continua). Non
potendo usare per i bunch la corrente continua ricorriamo a PPP (particle per impulse) o al
PPS (particle per second).
Per esempio, se estraiamo PPS=1012 protoni al secondo la corrente sarà
I = PPS * e = 0.2 * 10 −6 A
Per Duty Cycle si intende la frazione di tempo per la quale ho a disposizione il fascio. Ad
esempio se il mio boost dura 1s ed il ciclo di accelerazione 10s, allora il duty cycle
1s/10s=10%, questo è molto importante a seconda dei rilevatori utilizzati e può varia re dal
20% degli acceleratori di protoni allo 0.1% di quelli di elettroni.
Sebbene non sia un componente specifico altresì fondamentale per un buon acceleratore.
Dato che, durante un ciclo di accelerazione la particella percorre svariate volte la distanza
terra-sole, è fondamentale un vuoto “quasi” assoluto ottenuto mediante “bakeout”
(riscaldamento del metallo) e pompe a vuoto in continuo funzionamento.
Campi guida e campi di focalizzazione variano molto a seconda del tipo di macchina.
Esaminiamo ora in dettaglio i vari tipi di acceleratori
Acceleratori a tensione continua
Sono stati i primi esempi di acceleratori, in grado di raggiungere energie di qualche MeV con
correnti molto alte. Oggi sono usati o nelle applicazioni mediche o per pre - accelerare particelle.
Acceleratore di Cockcroft - Walton
Negli anni ’30 Cockcroft e Walton accelerarono particelle fino a 25 MeV riuscendo a produrre la
frantumazione di atomi di litio. Grazie ad una macchina il cui cuore è un generatore che sfrutta un
sistema di rettificatori.Questi sono in grado di innalzare la tensione fino a valori non altissimi
(megavolt) e con un’elevata corrente. Sfruttando un generatore in alternata collegato ad una serie di
diodi e capacità succede che, per effetto dei diodi, le capacità si carichino nella semionda positiva
senza scaricarsi in quella negativa
4
Così dopo 2N condensatori e 2N diodi la tensione sarà 2NV0 dove V0 è la semiampiezza dell’onda
generata.
I limiti tecnici di questo acceleratore sono la tensione inversa sopportabile dai diodi ed il periodo
intrinseco di scarica dei condensatori. Quest’ultimo si può risolvere lavorando sulla frequenza ma il
primo è più difficile (diodi più resistenti).
Acceleratore di Van de Graff
Qui il campo elettrico viene generato attraverso un trasporto fisico di carica. Anche qui le energie
si attestano sui 10 - 15 MeV, ma le correnti sono decisamente inferiori (µA contro i mA di prima). Le
cariche vengono depositate su di una cinghia di cuoio che le trasporta al collettore di carica
superiore (quindi la velocità della cinghia regola la quantità di carica). Da qui poi i protoni vengono
accelerati in un tubo a vuoto messo a terra (0V). Il problema più grosso di questo acceleratore è
l’isolamento, poiché anche la carcassa dell’acceleratore è collegata a terra e quindi superata una
certa d.d.p. si creano scariche potenzialmente distruttive. Un modo per ridurre questo pericolo è il
riempimento del contenitore con SF6 che è, però, altamente velenoso.
Tandem Van de Graff
Per superare il limite dell’acceleratore convenzionale, negli anni ’60 si penso di sfruttare più di una
volta quella stessa d.d.p.. Nasce così il tandem Van de Graff.
Si tratta di un Van de Graff ruotato di 90° con un elemento centrale mantenuto in tensione da cui si
dipartono due tubi acceleratori. In questo caso sfruttiamo ioni negativi (p.es. O-). Gli O- partono
dalla sorgente e vengono accelerati verso il corpo centrale; a questo punto passano attraverso un
nuvola di gas inerte e subiscono il fenomeno dello stripping (perdita di 2 o più elettroni)
dopodiché gli ioni On+ vengono accelerati dall’altra parte e portati al magnete d’analisi. L’energia
che nel caso del Van de Graff vale E=qV, per il tandem vale
E=(q+1)V
Dove il vantaggio non risiede nell’1 ma nella possibilità di raggiungere valori di Q piuttosto elevati.
Il principale svantaggio del tandem risiede nella stocasticità dello stripping, cosi potremo
ritrovarci nella seconda parte del tandem ioni O4+ O5+ O6+ O7+ avendo quindi un fascio tutt’altro
che monoenergetico. Per questo è presente alla fine della macchina un magnete che ci permette di
selezionare le particelle desiderate; inoltre resta valido il problema delle scariche elettriche.
Acceleratori lineari
LINAC
Per ottenere energie più elevate si deve ricorrere a d.d.p. impulsive, come nel caso dei LINAC. Un
LINAC sfrutta la stessa d.d.p. ma la utilizza più volte e ad impulsi. Schematicamente un LINAC è
costituito da una sorgente a cui è collegato un tubo a vuoto nel quale incontriamo periodicamente
dei cilindretti cavi detti “drift tubes”. Questi sono collegati alternativamente ai capi di un oscillatore
RF in modo da creare una d.d.p. alternata, per effetto della quale le particelle si muovono di moto
uniforme dentro i tubi (per effetto Faraday), mentre vengono accelerati al di fuori se trovano la
giusta d.d.p.
Uno dei primi LINAC è quello di Wideroe, composto da un tubo di vetro all’interno del quale
troviamo i drift tubes. Per assicurarsi che le particelle vedano sempre una d.d.p. buona deve essere
soddisfatta la relazione
vτ
v cτ RC βλ
L = RC =
=
2
2
c 2
5
e per questo motivo le strutture sono dette βλ/2. Per quanto riguarda la lunghezza dei tubi, essa
cresce all’aumentare dell’energia cinetica delle particelle e quindi per ovvi motivi tecnici un
LINAC deve avere particelle con una buona K iniziale. Una volta che si arriva a v ultra
relativistiche il tutto resta costante. Consideriamo l’ n-esima fenditura, la particella avrà velocità vn
ed energia cinetica Kn. Detto T il periodo dell’onda di lunghezza λ, e kπ la differenza di fase tra le
due fenditure abbiamo
v λ
2K n λ
T
Ln = kv n = k n = k
c 2
2
Wr 2
dalla quale è possibile ricavare una formula valida per la lunghezza totale L = N < Ln >
K λ
k
K³ λ
=
Wr 2 ∆k AW0 2
integrando l’azione del campo elettrico sulla carica otteniamo il guadagno d’energia
∆K n = Qe∫ E n sin Φ( s )ds = QeE n ∆l n sin Φ ( s)
L = Nk
Il modello di Wideroe, però, non gestisce le HF e presenta un forte irraggiamento. Nella seconda
guerra mondiale Alvarez costruì un nuovo LINAC con l’introduzione di cavità risonanti. Allo stato
attuale (SLAC) si usa l’electron LINAC (si usano e- con v=c) che è in grado di utilizzare HF
(3GHz) grazie ai Klystron di Potenza e che consiste in un unico tubo all’interno del quale troviamo
guide d’onda sotto forma di dischi “bucati”.
Principio di stabilità di fase
Analizziamo ora il problema della fase delle particelle. Sia la particella sincrona (p.s.) quella che, ad
ogni accelerazione, vede sempre lo stesso identico campo elettrico(nel quarto di periodo dove la
tensione è crescente). Supponiamo che un’altra particella giunga lì con un lieve ritardo rispetto alla
p.s., essa incontrerà una d.d.p. maggiore di quella della p.s. ed quindi impiegherà meno tempo ad
attraversare il tubo, diminuendo così il suo ritardo. Analogamente per il caso dell’anticipo, per cui
la fase della particella oscilla attorno a quella della p.s. ⇒ le particelle tendono a
raggrupparsi attorno alla p.s. .
Quanto detto non vale se la tensione è nel quarto di periodo decrescente, in quel caso si perdono le
particelle, inoltre è bene non scegliere V troppo vicino al picco altrimenti è molto alto il rischio di
perdere tutte le particelle. Di norma si sceglie V pari alla metà.
Esiste anche la stabilità longitudinale, dovuta principalmente all’effetto focalizzante delle linee di
bordo del campo elettrico nelle intercapedini
La somma degli effetti in I e II non è zero poiché la particella passa più tempo in I che in II, quindi
l’effetto globale è focalizzante (Shrinkage).
6
Acceleratori circolari
Supponiamo di volere aumentare l’enrgia di SLAC fino a 1TeV, servirebbe un acceleratore di 15
Km! Per limitare gli eccessivi costi di produzione ci si è rivolti verso macchine a traiettoria circolare
nelle quali le particelle percorrono più volte la stessa orbita. In realtà alcune queste macchine non
sono perfettamente circolari, ma presentano zone rettilinee (dove ci sono i rilevatori ed i mageti di
focalizzzazione) alternate a zone curvilinee (magenti di deflessione). Per tutti gli acceleratori
circolari la relazione fondamentale è
r r r
dp
= q( E + v × B)
dt
da cui si diparte la teoria specifica per ongi acceleratore, vediamoli in dettaglio.
Ciclotrone
Ovviamente il campo elettrico applicato non può essere costante poiché, essendo conservativo, la
sua circuitazione e zero e non avremmo nessun aumento di energia. Per quanto riguarda B, può
essere costante o meno se è costante ci troviamo di fronte ad un ciclotrone. Poiché
mv ²
mv
= evB ⇒ r =
r
eB
per cui le particelle accelerate in un ciclotrone percorrono una spirale. Esse vengono accelerate da
due elementi dette “D” collegate ad un RF e una volta completato il loro percorso vengono estratte
con campi elettrici e dirette verso il bersaglio. Notiamo che mentre per gli acceleratori a tensione
continua l’energia cinetica è
K = qV
per gli acceleratori circolari abbiamo
p² B²q²r ²
K=
=
2m
2m
dove la dipendenza dalla carica e dal raggio è al quadrato (importante per gli ioni).
Anche nel ciclotrone è fondamentale la sincronizzazione tra la particella ed il generatore RF,
secondo la solita equazione
τ orb = τ RC
dove il primo periodo e fisso nel solo limite classico, il che si deduce dall’espressione della
pulsazione della particella
qB
ω=
.
m
Uno dei limiti più grandi degli acceleratori circolari è l’irraggiamento. Le particelle infatti
subiscono una continua variazione dell’accelerazione e quindi irraggiano sempre proporzionalmente
a γ4 (vedi luce di sincrotrone).
Ritorniamo all’equazione di Lorentz e proviamo a risolverla sul piano mediano. L’orbita è chiusa e
non ci sarà accelerazione da parte di E, in realtà l’orbita si modifica lievemente dopo il primo giro,
)
ma poiché l’energia guadagnata in un giro è piccola approssimiamo ∆r=0. Detto s il versore
tangente possiamo scrivere l’equazione di Lorentz come
r
dp d
dp
dsˆ
= ( psˆ) =
sˆ + p = qEsˆ − qvBxˆ
dt dt
dt
dt
separando le due componenti
dp
v
= qE
p = qvB
dt
r
dall’ultima possiamo scrivere in termini di energia
pc = qrB c
7
ovvero
E ² = p ²c ² + m²c 4 = (qrB c)² + Wr2
per cui sapendo a che energia voglio arrivare posso trovare il raggio corrispondente. Nel caso
ultrarelativistico trascuriamo la massa a riposo e otteniamo
E = pc = qB rc ≅ 300 B rq' (q’ espresso in multipli di e)
per gli ioni si considera l’energia di ogni singolo nucleone
2
k
q
= 48 ( Br )²
A
A
Calcoliamo ora il guadagno di energia in un giro:
W ² − Wr2 δB δr
δK = δW =
W
B r
poiché
(qcB r )qc = ( pc)(qc) = qc ² mv = qW
2πr
δt
allora
δK = 2πqr (rB& + B r&)
poiché nel ciclotrone B è costante nel tempo
K + 2Wr δr
W ² − Wr2 δr
δK =
=K
K + Wr r
W
r
se, come spesso accade nei ciclotroni, K<<Wr, si ha
δK
δr
=2
K
r
se ci troviamo in presenza di un sincrotrone dove il raggio non varia allora
δK = 2πqr ² B& = qV RF sin Φ
da cui si ricava la V necessaria ad accelerare le particelle
δK
V RF =
q sin Φ
Analizziamo ora il rapporto tra i campi in gioco e la frequenza di rivoluzione che è
v
pc ² 1
pc c
pc
=
=
=
ν=
ν0
2πr W 2πr W 2πr W
quindi possiamo scrivere
ν0B
qB rc
qB rc
B
ν =ν0
=
=ν0
=ν0
W
B ² + B0
W2
B ² + 0
q ² r ²c ²
per cui B0 è costante in un sincrotrone, mentre in un ciclotrone B è fisso ed aumenta r, quindi in
ogni caso la frequenza è variabile a meno che non sia il caso di un ciclotrone classico.
In quest’ultimo caso si ha
qc ² B
ν=
2πW
che per un ciclotrone classico diventa
qc ² B
ν=
2πWr
per cui la ν rimane costante. Il primo esemplare fu realizzato nel ’32 da Livingstone, ma fu
abbandonato con l’avvento di energie relativistiche. (con una parentesi del ciclotrone isocrono).A
(qB rc)² + W02
8
causa di una non perfetta iniezione si può verificare che la particella devii dal suo moto sul piano o
dal piano. Si possono recuperare dette particelle? E’ il problema della stabilità trasversale.
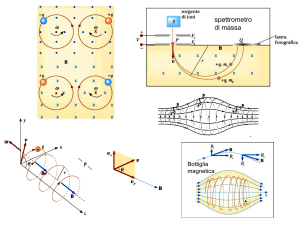
Stabilità trasversale – Focalizzazione
Dando opportuni campi magnetici è possibile creare forze di richiamo per effetto delle quali le
particelle oscillano attorno all’orbita di equilibrio. Quelle oscillazioni sono delle oscillazioni di
betatrone. Un primo semplice metodo consiste nella focalizzazione geometrica (campo di
dipolo). La particella, dopo aver percorso un certo tratto, devia di un angolo α continuando a fare
un orbita circolare ma con un diverso centro (ruotato rispetto al primo di α), dopo 180° la situazione
ritorna al punto iniziale ottenendo così oscillazioni attorno all’orbita stabile. Di che ordine è questa
fluttuazione? E’ la differenza tra i raggi ovvero rdα che per α=10-3 rad e r=103m otteniamo una
fluttuazione di 1 m che è troppo elevata per i moderni acceleratori, inoltre questa focalizzazione non
mi permette di recuperare il moto elicoidale lungo z. Cerchiamo quindi un campo magnetico con
componenti lungo z e lungo il raggio ma non lungo la direzione di propagazione.
r
B = B x xˆ + B y yˆ
Definiamo l’indice di campo come
n=−
ρ ∂B z
B0 ∂x x = ρ
dove ρ è il raggio stabile e B0 è il campo di dipolo se voglio contenere il moto sull’asse x.
∂B z
Ovviamente per n>0 si ha
< 0 per cui Bz diminuisce, e viceversa. Ora
∂x
∂B z ∂B x
=
∂x
∂z
che deriva da
∇×B = 0
(equazione valida tra i magneti)
quindi gli indici di campo relativi ad x e z hanno lo stesso segno, ma la stabilità trasversale e
longitudinale richiedono due indici diversi!!
Ad esempio per quella trasversale
Fz = − kz = − qv s B x ⇒ B x = −k ' z
la cui derivata rispetto a z è negativa per cui n>0. Per la longitudinale
Fx = − kx = −v s B z q ⇒ B z = k ' x
da cui si ricava che n<0.
Definiamo la focalizzazione forte con |n|>1 e debole se 0<n<1, allora abbiamo che se focalizziamo
debolmente su z non disturbiamo troppo su x. Per la focalizzazione forte si utilizzano dei
quadrupoli in grado di focalizzare o lungo x o lungo z, mediante combinazione dei due tipi
otteniamo la focalizzazione desiderata. I quadrupoli sono costituiti da 4 magneti sagomati secondo
l’iperbole xz=cost ed alternano polo N e S come in figura
N
S
S
N
9
Oscillazioni di Betatrone
Analizziamo ora le oscillazioni di betatrone. Si tratta di oscillazioni radiali e perpendicolari attorno
alla circonferenza stabile.
Sia ŝ la nostra traiettoria stabile, supponiamo di trovare la nostra particella su di un’altra curva e
consideriamo B = B z con Bs = 0 sempre. Inoltre supponiamo che v x , z << v s se ρ 0 è il raggio della
traiettoria stabile, quello della traiettoria corrente è ρ = ρ 0 + x ovvero l’orbita diversa giace
comunque sullo stesso piano di quella originaria. Le variazioni significative si hanno solo al I°
ordine e la particella del fascio si considera come singola; inoltre durante l’oscillazione lungo x si
trascura l’aumento di energia della particella (poiché quest’ultima varia lentamente rispetto al
periodo delle oscillazioni). Trascurando il guadagno di energia per singolo giro (E=0), abbiamo
r
r r
dp
= qv × B
dt
Scomponibile nelle componenti x,z,s.Poiché dxˆ è orientato lungo ŝ si ha
dxˆ = sˆxˆ (t )dα
ma xˆ (t ) è un versore, ovvero
r
dxˆ r dα r dα
=s
=s
dxˆ = s dα ⇒
dt
dt
ds
ds
v
= − xˆ
dt
ρ
dx
v
= − sˆ
dt
ρ
dz
=0
dt
cambiamo variabile passando dal tempo alla coordinata curvilinea s. Attenzione: le derivante sono
intese in senso improprio
d
d
d²
d²
= v⇒
=
v²
dt ds
dt ² ds ²
e poniamo
dx
d ²x
= x' ⇒
= x' '
ds
ds ²
per cui sostituendo otteniamo
r
dp
v
v
= mv² &x& − ρ s xˆ + mv²&s& + ρ x sˆ + mv ² &z&zˆ
dt
ρ
ρ
r r
il secondo membro dell’equazione deve essere uguale qv × B , eseguendo il calcolo (Bs=0) e
confrontando i termini con gli stessi versori otteniamo
B
1
x' '− − q z = 0
ρ
p
B
z ' '−q x = 0
p
ora le due componenti dei campi sono scritte come
B x = B x 0 + B xx x + B xz z
10
B z = B z 0 + B zx x + B zz z
poiché a z=0 Bz=0, si ha che
B x 0 = B xx = 0
inoltre le equazioni di Maxwell tra i magneti sono
∇⋅B = 0
∇×B = 0
da cui si ricava che
B zz = 0
B xz = B zx
a questo punto sostituendo nelle due equazioni differenziali di prima ed introducendo l’indice di
campo n definito come
B
ρ ∂B
n = − 0 z = − ρ 0 zx
B0 ∂x
B0
e l’impulso
p 0 = qB0 ρ 0
e possibile sviluppare le suddette equazioni in serie di Taylor, ottenendo così
(1 − n)
1 ∆p
x' '+
x=
2
ρ 0 p0
ρ0
n
z ' '+ 2 z = 0
ρ0
che sono le equazioni che descrivono le oscillazioni di betatrone.
Vediamo ora questo acceleratore più in dettaglio.
Betatrone
Sono semplici acceleratori il cui principio di funzionamento si basa sulla legge di Faraday
dΦ ( B)
E=−
dt
come si nota dalla figura seguente, il betatrone è a simmetria cilindrica, per cui l’unica componente
attiva di E è quella angolare, per cui possiamo scrivere
dΦ ( B) 1
Eθ = −
dt 2πr
e poiché il betatrone accelera solo elettroni possiamo scrivere
11
Eθ =
dΦ ( B ) 1
dt 2πr
dalla relazione tra momento B q ed r si ricava
dp
dB
= qr
= Fθ
dt
dt
ma poiché la forza in gioco è solo quella elettrostatica
dB
Eθ = r
dt
da cui si ottiene
dB dΦ ( B) 1
=
dt
dt 2πr ²
che è detta relazione di betatrone. Ma poiché
Φ ( B ) = πr ² B
possiamo scrivere
dB 1 dB
=
dt 2 dt
nota anche come relazione 2:1.
Sincrotrone
E’ un “ciambellone” di raggio r all’interno del quale ruotano le particelle su un orbita fissa grazie a
dipoli che sagomano la traiettoria, quindi il campo magnetico non è più grande quanto
l’acceleratore, inoltre il cerchi è spezzettato in tratti rettilinei (rivelazione, focalizzazione) e
curvilinei (deflessione). Poiché
p = erB
il campo magnetico deve crescere con l’impulso, ciò vale anche per
v
ν=
r
che deve anche essere in fase con la tensione acceleratrice. Anche queste sono macchine a
funzionamento impulsato.
Per la generazione di B si possono usare bobine in grado di arrivare a 2T ma così inizia ad essere
rilevante l’effetto Joule, se invece utilizziamo dei superconduttori riusciamo ad arriva re anche a 67T.
Le particelle immesse non possono avere energia nulla, altrimenti dovrebbe essere B=0, ma anche a
bobina “spenta” resta sempre un Bresiduo dovuto al ciclo di isteresi, per tanto si deve avere B>Bresiduo
e le particelle devono essere iniettate con p diverso da zero mediante un CW o un linac.
Il guadagno di energia per un giro è
δK = qV sin Φ s
e in ogni giro guadagno la stessa energia. Dalla relazione
δK = 2πqr (rB& + B r&)
si ricava che per un sincrotrone (r=cost)
δK = 2πqr ² B&
La frequenza di rivoluzione è
ν0B
ν=
B ² + B0
con
12
Wr
qcr
nel caso relativistico B0 è trascurabile rispetto a Bm, per cui ν → ν 0 Æ Velocità vicine a c e
frequenza costante.
Esaminiamo ora di aspetti peculiari di questo acceleratore.
B0 =
Radiazione di Sincrotrone
E’ l’energia irraggiata da una particella accelerata (visibile anche nei ciclotroni), sottoforma di
radiazione a spettro continuo emessa tangenzialmente all’orbita con un apertura angolare γ –1. La
potenza è
q ² a ² 1 − β ² sin ²θ
P=
6πε 0 c ³ (1 − β ²)³
dove θ è l’angolo tra velocità ed accelerazione. Per gli acceleratori circolari
q²a²
1
P=
6πε 0 c ³ (1 − β ²)²
e poiché l’accelerazione centripeta è
ωr
a = ω ²r ⇒ β =
c
allora
q ²ω ² β ² 4
P=
γ
6πε 0 c
Per cui (se la velocità angolare è costante), l’energia persa in un giro è
2π q ²ωγ 4 q ² βγ 4
Eloss = PT = P
=
=
ω
3ε 0 c
3ε 0 r
che nel caso ultrarelativistico diventa
q ²γ 4
γ4
Eloss =
≅ 6 * 10 −15
3ε 0 r
r
e poiché
E
γ =
m0
a parità di energia, l’emissione è inversamente proporzionale alla massa. Ad esempio il rapporto di
luce tra elettrone e protone e di 1013!!
Per capire l’importanza del fenomeno basti pensare che per E=30GeV e r=120m si ha
Eloss=650MeV, per cui non è conveniente accelerare!!
Oscillazioni di Sincrotrone
Si tratta di oscillazioni di fase della particelle (con conseguente oscillazione di energia) , che
vengono anche dette longitudinali. A causa di queste oscillazioni al particella tende a scostarsi dalla
fase stabile, pur rimanendo sul piano dell’orbita originaria. Prendiamo come riferimento la
“particella sincrona”, caratterizzata dai valori Ws Φs ωs δts. Lo scarto di fase e di energia tra la p.s.
ed un’altra generica particella è
∆W = W − Ws
∆φ = φ − φ s
Poniamo
13
∆W
ϕ = ∆φ
Ws
per cui se le oscillazioni sono piccole rispetto all’energia della p.s. supporremo w<<1 e
analogamente per φ. I due coefficienti sono adimensionali. Considerando un solo giro possiamo
scrivere
δ (W − Ws ) = qV [sin φ − sin φ s ]
dove qVsinΦ è il guadagno della particella in un giro. Poiché l’energia della p.s. varia lentamente in
rapporto al periodo delle oscillazioni di sincrotrone, possiamo scrivere
∆W qV
=
δ
[sin φ − sin φ s ]
Ws Ws
ovvero
qVω
w& =
[sin(ϕ + φ s ) − sin φ s ]
2πWs
che è la prima equazione per le oscillazioni di sincrotrone. Eseguendo un ragionamento analogo per
la fase otteniamo
δ (φ − φ s ) = ω RF (δt − δt s ) = hω s (δt − δt s )
w=
δϕ
δt
= hω s 1 −
δt
δt s
∆ω
ω
= hω s 1 −
= − hω s
ωs
ωs
poiché la variazione di omega può essere correlata alla variazione di energia come segue
∆ω
= Γs w
ϕ& ≅
ωs
dove Γs è un fattore di compressone che riguarda i rapporti tra le masse in movimento. Possiamo
quindi scrivere la seconda equazione differenziale come (sono stati rimossi i pedici “s”.)
ϕ& = hωΓw
e
qVω
w& =
[sin(ϕ + φ s ) − sin φ s ]
2πWs
otteniamo così l’evoluzione temporale dell’energia e della fase della particella rispetto alla
particella di riferimento.
Collisionatori
Come descritto a pagina 3 è molto più conveniente, dal punto di vista energetico, utilizzare due
fasci collidenti piuttosto che un bersaglio fisso. Ciò ha però lo svantaggio della limitatezza della
fisica e degli esperimenti eseguibili (vedi fasci secondari), in oltre è difficile coprire tutto l’angolo
solido nella zona di interazione, rischiando così di perdere dei prodotti. Anche il funzionamento del
collider è impulsato, ossia le particelle viaggiano in bunch.
Luminosità
E’ un parametro essenziale ed è definito,per un collider, come
dN
= Lσ
dt
dove il primo membro è il numero di interazioni per unità di tempo. Spesso si usa la luminosità
integrata ovvero
14
Lint = ∫ Ldt ' =
N
σ
dalla quale si può ricavare il numero medio di eventi in un intervallo temporale fissato. Possiamo
scrivere
N
dN
N& =
= Φ N bσ = A N bσ
dt
A
dove A è l’area comune fra i due bunch; poiché lo scontro avviene tra bunch e bunch, Nb è il
numero di particelle in un pacchetto. Le particelle che arrivano sono
N A N bunchν
per cui
N N
L = ν A b N bunch
A
quindi per avere un buona luminosità bisogna rendere piccola la sezione trasversale dei pacchetti
nelle zone di interazione che, supponendo una distribuzione gaussiana dei fasci, è data da
A = 4πσ xσ y
è anche possibile effettuare misure a bassa luminosità, ma per non vedere il fondo è necessario che
questo parametro sia alto.
LHC
L’LHC è un dei più grandi collider al mondo. Esso si basa sull’apparato preesistente del LEP, un
collider elettrone positrone con una circonferenza di 27 Km; a differenza di quest’ultimo, con LHC
si potranno studiare interazioni ione-ione e protone-protone(preferite a quelle pp per la difficoltà di
creazione di antiprotoni e della necessità del loro “raffreddamento”). Per le collisioni pp sono in
funzione i due rilevatori ATLAS e CMS (fortemente importati alla ricerca del bosone di Higgs o di
qualche altro meccanismo di rottura spontanea di simmetria), mentre delle collisioni tra fasci di ioni
si occupa l’esperimento ALICE (studio delle condizioni dell’universo dopo 10-12s,e raggiungimento
di densità pari a quelle delle stelle di neutroni). E’ inoltre in funzione un quarto esperimento detto
LHC-b per lo studio della fisica del b. LHC è costituito da 2 canali controrotanti in modo da poter
effettuare collisioni tra fasci di protoni equienergetici.
Il sistema di immissione sfrutta l’apparato preesistente al CERN. Le particelle (protoni prodotti
dalla ionizzazione di H e pre-accelerate da un quadrupolo a RF) vengono portate a 50 MeV da un
LINAC e successivamente iniettate nel PS Booster dal quale escono sottoforma di pacchetti di 1011
da 1.4 GeV da qui proseguono il loro cammino verso PS ed SPS che li inietterà nel collider in versi
opposti con un energia di 450 GeV. A questo punto raggiungono l’energia di 7 TeV in circa 20
minuti mentre vengono tenuti in traiettoria da un campo magnetico di 8.33 T generato da circa 1200
dipoli magnetici con spire in Niobio-Titanio nei quali l’He superfluido funge da refrigerante. In
quest’ottica è molto importante tenere sotto controllo la temperatura, onde evitare la vaporizzazione
dell’He con conseguenti problemi di tensione.
Poiché la frequenza di collisione è di 40 MHz, avviene una ogni 20ns, ma i pacchetti sono
equispaziati? Moltiplicando la somma della lunghezza di bunch e dello spazio inter-bunch per il
numero di bunch ottengo un valore di 21.4 Km che è inferiore ai 27 Km dell’anello, per cui ad un
certo punto ci sarà un bunch isolato messo in modo da non interferire con gli altri “pilot bunch”.
la corrente di fascio è di 0.54 A e l’energia persa per
radiazione di sincrotrone è di 4.2 KeV per giro, la potenza
irradiata di circa 3.7 KW.