Moto di un punto materiale
in un campo di forze centrali
1.1
(Lezione L15 – Prof. Della Valle)
1. Momento di una forza, momento angolare, II eq. cardinale
Momento di un vettore
!
Dati un vettore applicato a ed un punto O, detto polo, si dice momento
il vettore:
!
!
! !
M
M = r !a,
!
dove r è il vettore che va da O al punto di applicazione di
!
O
a . Come conseguenza della definizione, il momento è
!
ortogonale al piano individuato da a e da O ed ha per
d
modulo M = r ! a ! sin " = d ! a ,
!
!
!
dove ! è l’angolo compreso tra r ed a , d è la
M
!
distanza della retta di applicazione di a dal polo
!
O. Se trasliamo il vettore applicato a lungo la
O
sua retta di applicazione, il momento rispetto
allo stesso polo O non cambia:
d
!
!
! !
! !
!
r1
M 2 = r2 ! a = ( r1 + r12 ) ! a =
!
!
!
! ! ! !
! !
r
a
12
= r1 ! a + r12 ! a = r1 ! a = M 1
! !
! !
essendo r12 || a " r12 ! a = 0 .
!
!
M di a rispetto ad O
!
r
!
r2
!
a
!
!
a
Momento di una forza
!
!
!
In particolare, dati una forza F ed un polo O, si definisce momento ! della forza F rispetto
ad O il vettore:
!
! !
" = r!F ,
!
!
dove r è il vettore che va da O al punto di applicazione di F . Le dimensioni del momento di
una forza sono:
2
"2
[! ] = [r ] [ F ] = [ L ] [ M ] [T ]
Nel S.I. il momento di una forza si misura in N ! m .
Momento della quantità di moto
!
Dati un punto materiale P, avente quantità di moto p , ed un polo O, si definisce momento
!
della quantità di moto o momento angolare L di P rispetto ad O il vettore
!
! !
L = r! p,
Fisica
L15 – Prof. Della Valle
!
dove r è il vettore che va
! da O a P. Il!momento angolare risulta così ortogonale al piano
individuato dal vettore p (ovvero da v , ad esso parallelo) e dal punto O. Se un punto
materiale compie un moto piano, ed anche il polo O viene scelto nel piano del moto, allora il
momento angolare è ortogonale al piano del moto, e quindi la sua direzione resta costante nel
tempo.
!
Viceversa: se il momento angolare L di un punto materiale P ha una direzione costante,
allora il moto di P è un moto piano.
Esempi
a) Moto circolare
Consideriamo il moto lungo una circonferenza
di raggio r e centro O: il momento angolare di
P rispetto al centro O vale
!
!
O
!
! !
!
L = m r " v = m r 2!
!
r
!
p
b) Moto piano non circolare
Conviene utilizzare le coordinate polari, e scomporre la velocità secondo le componenti:
dr
d"
vr =
; v" = r
= r!
y
dt
dt
!
!
vr
v
Il momento angolare rispetto all’origine, allora, vale:
!
!
!
v!
! !
!
r
L = m r # v = m r # (v r uˆ r + v" uˆ" ) =
!
!
!
!
!
= m [v r # uˆ + v r # uˆ ] = m v r # uˆ = m r 2!
r
r
"
"
"
"
O
!
essendo r ! uˆ r = 0 .
x
c) Moto non piano
Anche in un moto non piano, ad ogni istante si può definire un piano del moto come il piano
!
del cerchio osculatore della traiettoria. Si definisce anche una velocità angolare ! il cui
modulo è la derivata temporale dell’anomalia ! di P, la direzione è ortogonale al piano
istantaneo del moto, ed il verso è tale che punti verso un osservatore che vede la rotazione del
!
raggio vettore r avvenire in senso antiorario.
Anche in questo caso, allora, il momento angolare di P rispetto all’origine vale
!
!
L = m r 2!
La II equazione cardinale della dinamica
Consideriamo un riferimento inerziale, ed un punto materiale P in moto in esso; se deriviamo
rispetto
al tempo l’espressione del momento angolare di P rispetto ad un polo O troviamo:
!
!
!
!
!
dL
d ! !
dr ! ! dp
(r " p ) = " p + r " = v! " p! + r! " F = r! " F = !!
=
dt
dt
dt
dt
! !
! !
essendo v || p " v ! p = 0 .
Resta così derivata la Seconda equazione cardinale o Teorema del momento angolare:
2
Fisica
L15 – Prof. Della Valle
In ogni istante, la derivata temporale del momento angolare di un punto materiale P è pari al
momento della risultante delle forze applicate a P rispetto allo stesso polo O
!
!
dL
= !
dt
Si dice “seconda equazione cardinale” perché la si incontra, nello studio dei sistemi di punti,
preceduta da una! “prima equazione cardinale”. In particolare, se
!
!
dL
" = 0 !
= 0 ! L = cost.
dt
in modulo, direzione e verso, e quindi il moto è piano. Dunque, come conseguenza della II
equazione cardinale, se il momento delle forze applicate ad un punto materiale P rispetto ad
un certo polo O è nullo, allora il momento angolare di P rispetto ad O è costante, ed il moto di
P è piano.
2. Moto in un campo di forze centrali
Planarità del moto
In un campo di forze
! centrali avremo sempre:
! ! !
!
! !
dL
F (r )|| r !
= r " F = 0 ! L = cost.
dt
e quindi il moto è piano.
Si tratta di una delle caratteristiche principali dei campi di forze centrali. Più precisamente, in
un campo di forze centrali, il momento angolare rispetto al centro di forza O si conserva.
Nota bene: non è vera, in generale, l’implicazione inversa. Se infatti il momento angolare è
costante, avremo certamente che il momento della forza risultante si annulla, ma ciò può
corrispondere a due situazioni differenti:
! ! !
a) F (r )|| r ! il punto materiale P si muove effettivamente in un campo di forze centrali
di centro O.
b) il punto materiale P non è soggetto ad alcuna interazione e quindi si muove di moto
rettilineo uniforme.
Energia potenziale centrifuga in un campo di forze centrali
L’energia di un punto materiale P di massa m che si muove con velocità scalare v in un campo
1
di forze centrali e si trova a distanza r dal centro delle forze: E = E p ( r ) + m v 2
2
Poiché siamo in un campo di forze centrali, il moto è piano (il momento angolare si conserva,
ed in particolare la sua direzione resta costante); scriviamo allora la velocità vettoriale di P in
!
dr
d!
uˆ r + r
uˆ!
un sistema di coordinate polari nel piano del moto: v =
dt
dt
2
2
! !
& dr #
& d( #
e dunque il quadrato della velocità scalare vale v 2 = v ' v = v r2 + v(2 = $ ! + r 2 $
!
% dt "
% dt "
Sostituendo questa espressione in quella dell’energia otteniamo:
3
Fisica
L15 – Prof. Della Valle
2
2
! d' $
1 ! dr $ 1
E = E p (r ) + m # & + m r 2 # &
" dt %
2 " dt % 2
Consideriamo, ancora, il momento angolare del punto materiale rispetto al centro delle forze:
!
! !
!
!
d!
L = m r " v = m (r " v r uˆ r + r " v! uˆ! ) = m r v! uˆ r " uˆ! = m r 2
uˆ z
dt
e quindi l’ultimo termine nell’espressione dell’energia può essere scritto in termini di modulo
del momento angolare, e prende il nome di energia potenziale centrifuga del punto materiale
2
1
L2
2 ' d( $
P nel campo di forze centrali: m r %
! E p(centr)
" =
2
2
2m r
& dt #
Poiché infatti questo termine non dipende esplicitamente dal modulo della velocità scalare,
ma solo dalla distanza r, come l’energia potenziale, può essere interpretato come se fosse
un’energia potenziale, benché in realtà sia stato ricavato dall’espressione dell’energia cinetica.
Il suo effetto è lo stesso che avrebbe una forza repulsiva (centrifuga, appunto) apparente (in
un sistema non inerziale). Se infatti scegliamo un sistema di riferimento con l’asse z parallelo
all’asse di rotazione di P e che ruota con la stessa velocità angolare (istantanea) di P, in tale
sistema di riferimento abbiamo effettivamente una forza apparente centrifuga, e la sua
energia potenziale ha proprio l’espressione introdotta sopra, e il moto di P, in questo sistema
di riferimento, diventa monodimensionale, diretto lungo l’asse r. Per dimostrare l’asserto,
calcoliamo l’energia potenziale della forza centrifuga:
#
!
L2
L2
L2
ˆ
Fcentr = m% 2 r uˆ r =
u
!
L
=
dr
=
= E p(centr) (r )
r $#
3 r
3
2
"
mr
2m r
r mr
Energia potenziale efficace in un campo di forze centrali
Di conseguenza definiamo un’energia potenziale efficace del campo di forze centrale come la
somma dell’energia potenziale della forza del campo e dell’energia potenziale centrifuga:
L2
E p(eff ) ! E p + E p(centr) = E p ( r ) +
2m r 2
L’energia potenziale efficace rappresenta l’energia potenziale totale del punto materiale nel
sistema non inerziale sopra definito.
In un campo di forze centrali attrattivo, l’energia potenziale del campo è sempre negativa,
(come per il campo gravitazionale); l’energia potenziale efficace, invece, può essere negativa,
positiva o nulla a seconda che predomini il termine dovuto alla forza del campo o il termine
centrifugo (che è sempre positivo), o infine i due termini si bilancino esattamente.
Le condizioni iniziali del moto stabiliscono il valore del momento angolare, quindi
l’andamento dell’energia potenziale efficace al variare della distanza r, e l’energia totale del
punto materiale P, che si conserva durante il moto;
Il tipo di traiettoria che si ottiene dipende da queste due condizioni.
Consideriamo ora il caso di un campo di forze centrali attrattivo la cui energia potenziale
dipenda dall’inverso della distanza dal centro di forze, come nel caso del campo
gravitazionale percepito da una massa m in presenza di una massa M >> m, o come nel caso
del campo elettrostatico percepito da una particella carica leggera in presenza di una seconda
k
particella di carica opposta molto più pesante: E p ( r ) = ! .
r
4
Fisica
L15 – Prof. Della Valle
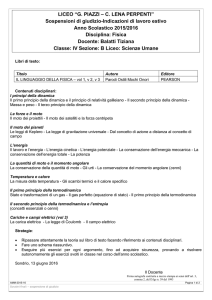
L’energia
potenziale efficace sarà dunque
k
L2
E p(eff ) ( r ) = ! +
r 2m r 2
Osserviamo che l’energia potenziale efficace sarà
positiva per valori bassi di r, poiché in questo caso
predomina il contributo centrifugo, inversamente
proporzionale al quadrato di r, e negativa per valori
alti di r, dove predomina il contributo attrattivo,
inversamente proporzionale ad r (per r " ! tenderà
a zero, poiché entrambi i contributi tendono ad
annullarsi) (vedi figura).
E (eff)
p (r )
E p(centr) (r )
E2
r0
O
rz
Il valore limite che separa la zona a valori positivi da
E1
L2
quella a valori negativi è: rz =
. Nella zona a E ( eff )
p , min r
2km
per
valori negativi è presente il punto di minima energia
potenziale efficace, in corrispondenza della distanza
doppia di quella per cui l’energia si annulla:
L2
rmin =
= 2rz . Il minimo di energia potenziale
km
k2m
(eff )
efficace vale: E p,min
= ! 2 .
2L
rmin
raf
r
E p (r )
3. Moto dei pianeti e leggi di Keplero
Moto di un punto materiale in un campo gravitazionale
Il concetto di energia potenziale efficace appena introdotto è utile per studiare il moto di un
punto materiale di massa m immerso nel campo gravitazionale generato dalla massa M >> m.
!
Le condizioni iniziali stabiliscono il momento angolare L e l’energia totale E, che si
!
conservano; la direzione di L stabilisce il piano del moto, mentre dal suo modulo dipende
l’entità dell’energia potenziale centrifuga, e quindi i valori rz , rmin ed E p( eff,min) . Poiché risulta
2
1 ! dr $
E = m # & + E p(eff ) ( r ) ' E p(eff ) ( r ) , avremo anzitutto che, fissato il valore di L, sarà
2 " dt %
certamente E ! E p( eff,min)
L’uguaglianza, poi, può valere solo nel caso in cui la velocità radiale sia nulla (in modo che
l’energia totale coincida con l’energia potenziale efficace), ed al tempo stesso la distanza dal
centro delle forze corrisponda proprio al minimo di energia potenziale efficace. Inoltre:
a) Se l’energia totale è negativa (E = E1 < 0 ), avremo che anche l’energia potenziale
efficace deve sempre restare negativa, ed in particolare al di sotto del valore E1 < 0 . Di
conseguenza il punto materiale P si trova confinato entro una buca di potenziale, e la sua
distanza dal centro delle forze varierà tra un valore minimo ed un valore massimo (vedi
5
Fisica
L15 – Prof. Della Valle
figura); la traiettoria, pertanto, è un ellisse. Il perielio e l’afelio si trovano alle distanze rper,af
" Mm
L2
2
! 2" Mm 2 rper,af + L2 = 0 =>
tali che sia: E p(eff ) ( r ) = !
+
= ! E1 => E1 2m rper,af
2
rper,af 2m rper,af
=> rper
con: E
( Mm
=
+
2 E1
( eff )
p , min
2
' ( Mm $
L2
%%
"" !
2m E1
& 2 E1 #
; raf
( Mm
=
!
2 E1
2
' ( Mm $
L2
%%
"" !
2m E1
& 2 E1 #
# 2 M 2m3
= "
! E1 < 0
2 L2
b) Se, in particolare, l’energia totale (negativa) coincide con l’energia potenziale efficace
minima, la traiettoria è una circonferenza, ed infatti le distanze corrispondenti al perielio e
all’afelio vanno a coincidere perché la radice si annulla, ed entrambe valgono proprio rmin .
c) Se l’energia totale è positiva ( E = E2 > 0 ) , il punto materiale P è libero di sfuggire alle
forze del campo (vedi figura), e la traiettoria è un’iperbole; il massimo avvicinamento
consentito al centro delle forze si determina imponendo velocità radiale nulla e quindi
uguaglianza fra l’energia potenziale efficace e l’energia totale. Si ottiene il valore:
2
r0 =
( ! Mm %
! Mm
L2
&&
## +
"
2mE 2
2E2
' 2E2 $
con
E2 > 0
(l’altra soluzione dell’equazione va scartata perché risulta negativa)
d) Se infine l’energia totale della particella è nulla, avremo che essa possiede l’energia
minima necessaria per sfuggire al campo, e la sua traiettoria risulta parabolica. Il punto di
massimo avvicinamento è a distanza rz , ove l’energia potenziale efficace si annulla, e quindi
coincide con l’energia totale.
Le leggi empiriche di Keplero
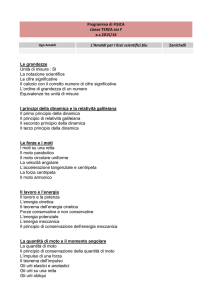
Nel II sec. d.C. Tolomeo di Alessandria propose il modello geocentrico dell’Universo, in cui
il Sole ruota intorno alla Terra. I pianeti descrivono orbite abbastanza complicate intorno alla
Terra (epicicli). Si tratta di un sistema complesso, ma capace di prevedere la posizione dei
pianeti.
Nel 1510 Niccolò Copernico propose il modello eliocentrico del Sistema Solare, in cui la
Terra e gli altri pianeti ruotano intorno al Sole. Utilizzava, in pratica, un sistema di
riferimento con buona approssimazione inerziale (solidale col Sole), che permette una
descrizione analitica molto più semplice del moto dei pianeti.
Sistema Tolemaico
Sistema Copernicano
Saturno
P
S
Giove
Epicicloide
TC
Terra
Luna
T CD
Mercurio
Deferente
Marte
6
Sole
Venere
Fisica
L15 – Prof. Della Valle
L’astronomo danese Tyco Brahe (1546-1601) fece accurate osservazioni astronomiche del
moto dei pianeti; in base ai dati raccolti da Brahe, l’astronomo Keplero (1571-1630) formulò
le 3 leggi empiriche sulla cinematica del moto dei pianeti:
I. Ogni pianeta descrive un’orbita ellittica ed il Sole occupa uno dei due fuochi dell’ellissi.
II. Il vettore posizione di ogni pianeta rispetto al Sole descrive aree uguali in tempi uguali.
III. Il quadrato del tempo di rivoluzione di ciascun pianeta è proporzionale al cubo del
semiasse maggiore della sua orbita T 2 ! a 3 .
Dimostrazione delle leggi di Keplero
Le leggi di Keplero possono essere dedotte dalla teoria della dinamica del moto sotto l’azione
di una forza centrale che dipende dall’inverso del quadrato della distanza.
I.
Infatti in presenza di un campo di forze centrali abbiamo dimostrato che il momento angolare
del sistema si conserva, e ciò implica che il moto è piano e che le traiettorie chiuse del moto
sono in generale delle ellissi.
"
!
d!
L d # 1 & dr
L d #1&
!
d$
L 1
="
="
da cui
L = m r 2! = cost #
=
% ()
% (
2
dt
m dr $ r '
dt
m d* $ r '
dt
mr
2
L’energia totale del sistema è costante
2
2
k 1 L2 ) d # 1 &, 1
2# L &
E = ! +
+
m
r
% 2(
+ % (.
$ mr '
r 2 m * d" $ r '- 2
2
" d( %
k 1 " dr % 1
e vale E = ! + m $ ' + m r 2 $ ' da cui
# dt &
r 2 # dt & 2
2
( d " 1 %+ 2mE 2mk 1 1
=> * $ '- = 2 + 2 . 2 .
L
L r r
) d! # r &,
mk 1
d "1%
2mE 2 1 1 1 1
2mE 1 " 1 2 1 1 %
si
ha
=
=
+
(
+
(
=
+ 2 ($ 2 (
+ '
$
'
L2 c
d! # r &
L2
c r r 2 c2 c2
L2
c #r
c r c2 &
2mE 1 e2
e ponendo
+ 2 = 2 , così che risulti definita una grandezza adimensionale
L2
c
c
2
2L E
c
e = 1+
e definendo una grandezza d = che ha le dimensioni di una lunghezza, si
2
mk
e
Posto ora
2
trova l’equazione differenziale
" d 1%
d "1%
$ ' = d 1 ( $ ( ' che possiamo integrare per
# r e&
d! # r &
separazione delle variabili:
" d 1%
d$ ! '
" d 1%
d 1
# r e&
= d( => arccos $ ! ' ! arccos (1) = ( ! 0 =>
! = cos(" )
2
#
&
r
e
r
e
" d 1%
! 1! $ ! '
# r e&
Otteniamo quindi
ed
r=
1+ ecos (! )
che rappresenta in coordinate polari l’equazione di una conica di eccentricità e e parametro
della direttrice d (pari alla distanza della direttrice dal fuoco della conica scelto come origine
del sistema di riferimento polare).
7
Fisica
L15 – Prof. Della Valle
Osserviamo quindi che in base alla espressione assunta dal parametro e = 1+
Eccentricità
Orbita
Energia
e=0
Circonferenza
Negativa
0<e<1
Ellisse
Negativa
e=1
Parabola
Nulla
2L2 E
risulta:
mk 2
e>1
Iperbole
Positiva
Dunque le orbite legate, che per quanto visto nel paragrafo precedente sono quelle con energia
totale negativa, sono tutte e sole le ellissi che hanno il Sole in uno dei fuochi.
II.
Si può facilmente dimostrare che la velocità areolare dA dt , cioè l’area spazzata dal raggio
vettore nell’unità di tempo, è costante.
y
P!
"
!
!
d
$
!
2
2
L = m r ! = cost # r
= cost.
v
dt
dA
1
1 2
P
ma:
dA = r ! ( r d" ) = r d"
d!
2
2
!
(possiamo approssimare l’areola dA a quella di un triangolo
x
O
che ha per altezza r e per base l’arco di cerchio r d! )
Allora abbiamo che la velocità areolare risulta
S
dA
1 d!
1 L
= r2
=
= cost.
dt
2
dt
2m
(seconda legge di Keplero per il moto dei pianeti: il
raggio vettore copre aree uguali in tempi uguali).
III.
Infine, consideriamo una generica orbita ellittica di semiasse maggiore a ed eccentricità e. E’
noto dalla geometria elementare che l’area di tale ellisse vale: A = ! a 2
possiamo esprimere questa stessa area come l’integrale della velocità
T
T
dA
1
precedenza integrata sull’intero periodo T dell’orbita: A = !
dt = !
0 dt
0 2
1 " e2 . D’altra parte
areolare ricavata in
L
LT
.
dt =
m
2m
Eguagliando le due espressioni troviamo LT = 2m! a 2 1 " e2 . Inoltre si può dimostrare che il
momento angolare del sistema in funzione dei parametri dell’orbita ellittica può scriversi nella
forma seguente: L = mka(1 ! e2 ) (vedi appendice matematica). Per il caso particolare di un
orbita circolare (e = 0), questa relazione si dimostra banalmente, infatti abbiamo, dalla I eq.
!
2
!
!
k
mkR
cardinale: F = maN = maC ! " 2 ûr = " m# 2 R ûr ! 2 = m 2# 2 R 2 ! mkR = ( mR 2# ) = L2
R
R
quindi L = mkR .
4! 2m 3 4! 2 3
Quindi (in generale, per orbite ellittiche): T mka = 2m! a 2 => T 2 =
a =
a
k
"M
(terza legge di Keplero per il moto dei pianeti, indicando con M la massa del Sole). Si noti
che la costante di proporzionalità tra il cubo del semiasse maggiore ed il quadrato del tempo
di rivoluzione è la stessa per tutte le orbite.
8
Fisica
L15 – Prof. Della Valle
4. Modello classico di atomo
Il modello atomico di Thomson
Il modello più semplice di atomo è quello proposto dallo scopritore dell’elettrone, Joseph
John Thomson il quale nel 1902 ipotizzò che l’atomo fosse costituito da una sfera priva di
massa ma dotata di carica positiva uniformemente distribuita nella quale si troverebbero
immersi dei “grumi elementari” massivi di carica negativa, gli elettroni appunto.
Quando ad un atomo viene fornita energia, come nei suoi esperimenti con i tubi a raggi
catodici, esso manifesta la tendenza a liberare degli elettroni, perdendo carica negativa
(processo di ionizzazione) e divenendo quindi uno ione positivo (a causa della disparità tra la
carica totale positiva e la carica totale negativa che è diminuita a seguito della ionizzazione).
Questo modello pur fornendo una prima intuitiva descrizione microscopica dell’atomo
presentava numerosi limiti:
i)
ii)
iii)
iv)
Attribuendo massa esclusivamente agli elettroni si trovava che già un singolo
atomo dell’elemento più leggero in natura, l’idrogeno, doveva contenere circa
2000 elettroni (per poter tener conto della sua massa).
Non spiegava l’origine della diversa tendenza degli atomi di elementi diversi a
perdere elettroni (diverse energie di ionizzazione).
E’ in disaccordo con teoria dell’elettrostatica, in base alla quale si può dimostrare
che nessun sistema di cariche ammette una configurazione di equilibrio statico.
Evidenze sperimentali dovute a Ernest Rutherford nei primi
anni del 1900 dimostravano che la massa dell’atomo è
concentrata in una regione molto più piccola dell’atomo
stesso (il cosiddetto nucleo, di raggio circa 10-5 volte
inferiore al raggio atomico). Si tratta di esperimenti di
scattering di particelle alfa su sottili lamine di oro...
Il modello atomico di Rutherford
Per queste ragioni il modello di Thomson fu presto sostituito nel 1911 dal cosiddetto modello
di Rutherford, che proponeva un modello per così dire planetario dell’atomo: un nucleo denso
e piccolo carico positivamente circondato da elettroni in moto rotatorio su orbite di diverso
raggio.
Il modello di Rutherford è un modello dinamico dell’atomo che predice un equilibrio
dinamico del sistema di cariche positiva del nucleo e negative degli elettroni dovuta ad un
bilanciamento della forza di attrazione del nucleo con la forza centrifuga dovuta al moto
rotatorio degli elettroni, esattamente come accade nel nostro sistema planetario per i pianeti in
moto rotatorio intorno al Sole.
In base alla terza legge di Keplero, possiamo anche facilmente stimare il periodo di
rivoluzione dell’elettrone intorno al nucleo su di un orbita circolare di raggio R:
4 ! 2 me 3
!" 0 me R
R = 4! R
k
e2
Sapendo poi, dalla teoria dell’elettromagnetismo classico, che una carica che compie un moto
oscillatorio di periodo T emette radiazione elettromagnetica alla frequenza (1/T) di tale
oscillazione, è possibile stimare l’ordine di grandezza della frequenza della radiazione emessa
dagli atomi nei processi di eccitazione e diseccitazione (osservata negli esperimenti di
assorbimento o di emissione):
T=
9
Fisica
L15 – Prof. Della Valle
1
1
e2
=
T 4 " R "# 0 me R
I valori dedotti da questo calcolo, note le costanti fisiche e posto R circa uguale al raggio
dell’atomo (dell’ordine di 10-10 m), risultavano dello stesso ordine di grandezza delle
frequenze realmente osservate (cioè centinaia di THz). Nonostante questo buon accordo
qualitativo, anche questo modello presentava alcune fondamentali incongruenze sia con la
teoria classica dell’elettromagnetismo sia con importanti evidenze sperimentali:
!=
i)
ii)
iii)
Poichè l’elettrone ruotando intorno al nucleo irraggia esso dovrebbe perdere
energia e quindi portarsi su orbite sempre più interne fino a cadere sul nucleo
stesso.
I calcoli mostrano che il tempo impiegato per questo decadimento è dell’ordine di
10 ns circa, quindi l’atomo di Rutherford è estremamente instabile ed il modello
planetario non può in alcun modo rendere conto della stabilità della materia
nell’universo.
Infine, esperimenti di eccitazione e diseccitazione di numerose specie chimiche
avevano dimostrato che ogni elemento quando si diseccita emette luce di
particolari e caratteristiche lunghezze d’onda, cioè ogni elemento ha un
caratteristico spettro di emissione a righe, mentre un decadimento alla Rutherford
prevedrebbe la emissione di un continuo di lunghezze d’onda.
L’analisi critica di queste fondamentali incongruenze del modello planetario dell’atomo, e
quindi della fisica classica su cui esso si fondava, determinò il nascere di una nuova teoria
fisica, la meccanica quantistica.
10
Fisica
L15 – Prof. Della Valle
Appendice matematica.
Cambiamento di polo per il momento angolare
Dati due poli O ed O ! , entrambi fissi, cioè tali che O !O = cost. , avremo:
!
! """"! !
!
! """"! !
! ! """"! !
LO ! = r! " p = r + O!O " p = r " p + O!O " p = LO + O!O " p
(
)
O
Allora, derivando rispetto al tempo, otteniamo:
!
!
!
!
!
dLO"
dLO
dLO
dp
=
+ O "O !
=
+ O "O ! F
dt
dt
dt
dt
O !O
O!
!
r
!
p
!
r!
II equazione cardinale rispetto ad un polo mobile
!
Consideriamo ora un polo O che si muove con velocità vO in un riferimento inerziale. Il
!
!
momento angolare di P rispetto ad O vale:
z
v P || p
P !
!
!
!
!
!
drP drO
! !
!
! !
!
!
!
dr
r !
rP
L = r # p ; r = rP ! rO " v =
=
!
= v P ! vO
vO
dt
dt
dt
O
!
!
!
rO
dLO
!
!
! !
!
! !
dr ! ! !
y
=
" p + r " F = (v P # vO )" p + ! = # vO " p + !
dt
dt
x
!
!
!
!
essendo v P || p " v P ! p = 0 . In conclusione, la II equazione cardinale rispetto ad un
!
polo mobile con velocità vO diventa:
!
dLO !
!
!
+ vO " p = !
dt
Energia totale in funzione dei parametri dell’orbita e del momento angolare.
L’equazione di una sezione conica di eccentricità e in coordinate polari del piano con
ed
l’origine nel fuoco a distanza d dalla direttrice della conica è
= 1+ ecos(! ) .
r
ed dr
Derivandola
rispetto
all’angolo
teta
si
ha
da
cui
! 2
= !esin(" ) ,
r d"
2
" dr %
r4
r4
2
2
$ ' = 2 sin (! ) = 2 (1 ( cos (! )) , e ricordando l’equazione della conica abbiamo infine:
# d! & d
d
2
2
" dr %
r4 ) " d 1% ,
(1)
$ ' = 2 +1 ( $ ( ' .
# d! & d +* # r e & .2
2
1 ! dr $
1 ! dr $
L2
Ricordiamo poi che l’energia totale vale E = m # & + E p,eff (r) = m # & + E p (r) +
,
2 " dt %
2 " dt %
2mr 2
da cui ricaviamo
dr
2
L2
=
E
!
E
(r)
!
. Ma in generale è L = mr 2 (d! / dt) , quindi
(
)
p
2
dt
m
mr
11
Fisica
L15 – Prof. Della Valle
d!
L
= 2 e perciò combinando le ultime due relazioni per eliminare la
dt mr
derivata temporale avremo:
2
2
" dr dt % " dr % m 2 r 4 ) 2
L2 ,
(2)
$
' = $ ' = 2 + ( E ( E p (r)) ( 2 .
# dt d! & # d! &
L *m
mr Combinando ora la (1) con la (2) troviamo:
2
d 2 2d 1 2d 2 mE 2d mE p (r) d 2
1! 2 +
! =
!
! 2
r
er e2
L2
L2
r
2
Eliminando ora i due termini in r , ed eguagliando i termini costanti e quelli che dipendono da
2d 2 mE p (r)
2d
2d 2 mE
1
=!
r si trova
da cui rispettivamente:
= 1! 2 e
2
2
L
er
L
e
L2 " 1 ! e2 %
E =!
$
', e
2md 2 # e2 &
L2
o anche L = mked = mka(1 ! e2 ) ricordando che il semiasse maggiore
E p (r) = !
mder
dell’ellisse è dato dalla espressione a = ed / (1 ! e2 ) .
possiamo scrivere
Osserviamo quindi che:
Eccentricità
Orbita
Energia
e=0
Circonferenza
Negativa
0<e<1
Ellisse
Negativa
e=1
Parabola
Nulla
e>1
Iperbole
Positiva
Velocità di fuga
La velocità minima con cui un corpo deve essere lanciato per poter sfuggire al campo
gravitazionale della Terra, ipotizzando di trascurare l’attrito dell’aria, prende il nome di
velocità di fuga. Per calcolarla, in base a quanto visto sulla forma delle orbite, basta imporre
che l’energia totale del corpo sia nulla. Se allora il corpo si trova sulla superficie terrestre,
avremo:
M m
M m 1
1
E p ,i = ! # T
; E c ,i = m vi2 " Ei = ! # T + m vi2
RT
2
RT
2
2" M T
RT
Nota: la velocità di fuga è la stessa in tutte le direzioni, essendo stata ricavata da un’equazione
scalare.
Ei = 0 ! vi = v fuga =
12