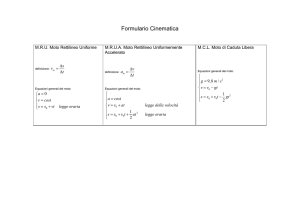
. Moti con - e")
Cinematica
Meccanica
Studio puramente descrittivo del moto dei corpi, indipendente
dalle cause (=> forze) che determinano le variazioni dello stato di moto
(=> accelerazioni = variazione di velocità)
Sistemi meccanici:
Il più semplice è il PUNTO MATERIALE: oggetto privo di dimensioni
(dotato di massa)
Astrazione utile:
ü
per definire in modo semplice alcune grandezze fondamentali
ü
quando interessa il moto globale e non i dettagli
Successivamente vedremmo:
•
•
•
Insiemi di punti materiali
Corpo rigido
Fluido
Cinematica scalare :
- studia il moto unidimensionale in funzione del tempo
- necessita di quantità scalari , esprimibili cioè da un unica funzione
del tempo
centro di massa
traslazione
rotazione
Cinematica vettoriale :
- studia il moto in due o più dimensioni
- necessita di quantità vettoriali
Studio del Moto: vogliamo capire come e perche si muovono i corpi per poi poter:
•
•
fare predizioni (moto delle comete, flusso di correnti)
fare avvenire un moto in un determinato modo (macchine, satelliti artificiali)
- Cinematica -
1
- Cinematica -
2
1
Punto materiale, sistema di riferimento
- Punto materiale ( astrazione) : oggetto privo di dimensioni
(concretamente: oggetto le cui dimensioni sono trascurabili
rispetto a quelle delle regioni di spazio in cui si muove o, meglio,
rispetto alle dimensioni tipiche entro cui variano apprezzabilmente
le quantità che ne determinano il moto ) ma dimensioni molto piu
grandi delle dimensioni atomiche.
- Traiettoria ( astrazione) : luogo dei punti dello spazio
occupati dal punto materiale durante il moto
La descrizione del moto presuppone la definizione di un
- sistema di coordinate che puo assumere varie forme
- la traiettoria, un origine su di essa e un verso di percorrenza
- scelta di un punto arbitrario dello spazio detto origine e il
raggio vettore che individua la posizione del punto materiale rispetto tale
origine.
uz
uy
uz
- scelta di un sistema di assi coordinati lungo i quali misurare
le distanze e/o rispetto ai quali misurare le posizioni angolari
- Cinematica -
uz uy uz
Vettori di modulo unitario
3
- Cinematica -
4
2
Moto unidimensionale : supponiamo data la traiettoria ( retta, curva...)
Indichiamo con s coordinata lungo la traiettoria
Origine
0
s(to)
Grafico
“traiettoria”
s(t1)
s(t3)
s(t2)
s(t4)….. x
della legge del moto:
(“diagramma orario”)
s(t)
s4
s2
s3
s1
s0=s(t0)
- Cinematica -
5
t0
t1
t2
t3
t4
t
- Cinematica -
6
3
Coordinata curvilinea e velocità scalare media
• “Coordinata curvilinea” s(t) :
– spazio percorso al tempo t
“traiettoria”
lungo la
luogo geometrico dei punti dello
spazio occupati dal punto materiale
durante il moto
s(t)
P(t)
Po
Velocità scalare media tra due istanti t1 e t2=t1+Δt
s(t)
vm =
s(t1 + Δt ) − s(t1 ) Δs
=
Δt
Δt
“legge del moto s(t)”
s(t2)
s(t1)
Δs
Δt
t1
t2
t
- Cinematica -
7
- Cinematica -
8
4
- Cinematica -
9
- Cinematica -
10
5
Velocità scalare istantanea
E la derivata rispetto al tempo della coordinata curvilinea s(t):
v(t ) = lim
Δt →0
s(t + Δt ) − s(t ) ds (t )
=
Δt
dt
(dimensione : [v] = m/s) :
s(t)
θ (t)
ds
v(t) = tan(θ(t))
= ds/dt
dt
t
Nota la funzione v(t), la legge del moto s(t) si ottiene per
integrazione:
s
ds = v(t) dt
In un triangolo rettangolo
un cateto e’ uguale
all’altro cateto per la
tangente dell’angolo
opposto al primo
- Cinematica -
11
t
Δs = ∫ ds = s (t ) − s (t0 ) = ∫ v(t ' )dt '
s0
t0
t
s (t ) = s(t0 ) + ∫ v(t ' )dt '
t0
- Cinematica -
12
6
Spazio: nota la funzione velocitá, lo spazio é l area sottesa dalla funzione v(t) nell intervallo di tempo
considerato
s(t)
“legge del moto s(t)”
s(t2)
s(t1)
Δt
v(t)
Δs
2
Δt
t1
t2
s (t ) = s (t0 ) + ∑ v (ti ) Δt
t
i =0
to
Δs : variazione finita di spazio lungo la traiettoria nel tempo finito Δt
t1
t
t2
v(t)
5
s (t ) = s (t0 ) + ∑ v (ti ) Δt
ds : variazione dello spazio lungo la traiettoria nel tempo
infinitesimo dt. E’ anch’esso un infinitesimo
Derivata della variabile s
dipendente
(t + Δst()funzione
− s (t )
v(t ) = lim
della variabile tΔ) trispetto
→0 la variabile indipendente t
Δt
=
i =0
Δt
to
t1
t2
t3
t4
t
v(t)
ds (t )
dt
t
s (t ) = s (t0 ) + ∫ v(t ' )dt '
dt
t0
to
- Cinematica -
t
t
13
integrale
- Cinematica definito
14
7
Accelerazione
Esempio di moti unidimensionali
Accelerazione scalare media nell’intervallo iesimo ..:
am =
v(t1 + Δt ) − v(t1 ) Δv
=
Δt
Δt
Sia a= dv(t)/dt o accelerazione tangenziale
(dimensione : [a] = m/s2)
uniforme
Accelerazione scalare istantanea :
v(t + Δt ) − v(t ) dv (t ) d ⎛ ds (t ) ⎞ d 2 s(t )
=
= ⎜
⎟≡
Δt →0
Δt
dt
dt ⎝ dt ⎠
dt 2
moto armonico
a(t ) = lim
Moto circolare : la traiettoria e una una circonferenza
t
Moto vario : la traiettoria e una curva
Δv = ∫ dv = v(t ) − v(t0 ) = ∫ a(t ' )dt '
v0
a=a(t)
Moto rettilineo : la traiettoria e una retta e si indica con s== x la
coordinata lungo la retta
Data la funzione a(t), la velocità v(t) si ottiene per integrazione:
v
a=cost
a(t) = -k s(t)
moto smorzato esponenzialmente a(t)=-γv
moto vario
dv = a(t) dt
a=0 , v=cost
uniformemente accelerato
Moto piano : la traiettoria giace in un piano
t0
t
v(t ) = v(t0 ) + ∫ a (t ' )dt '
t0
- Cinematica -
15
- Cinematica -
16
8
Moto rettilineo uniforme
Moto rettilineo
La traiettoria piu semplice: un segmento di retta:
v = cost
La velocità non cambia nel tempo
Il sistema di riferimento è una retta orientata
Legge oraria del moto rettilineo uniforme
(dipende dal problema specifico)
direzione
verso
origine O (fissata arbitrariamente)
t
t
t0
t0
x(t ) = x0 + ∫ v(t )dt = x0 + v ∫ dt = x0 + v(t − t0 )
• Lo spazio è funzione lineare del tempo
• In tempi uguali sono percorsi spazi uguali
• x cresce sempre o decresce sempre
• La velocità media coincide con la velocità istantanea
Diagramma orario: è il grafico della funzione x(t): come varia x in
funzione del tempo. La particella (punto materiale) si muove lungo x.
Esempio:
x
v
t
- Cinematica -
t
17
- Cinematica -
18
9
Moto rettilineo accelerato
La velocità cambia nel tempo
L accelerazione istantanea è:
am =
a = lim
Δt →0
Δv v 2 − v1
=
Δt
t2 − t1
L accelerazione nel moto rettilineo
accelerazione
media
a=
Δv dv d 2 x
=
=
Δt dt dt 2
dv
dt
v2
dv = a (t ) dt
v1
t
relazione
generale
Ø a = 0 à v = cost à moto rettilineo uniforme
Ø a = cost à moto rettilineo uniformemente accelerato
v2
Δv = v 2 − v1 = ∫ dv = ∫ a (t ) dt
v1
È fondamentale conoscere le
condizioni iniziali (v0 e t0)
v (t ) = v 0 + ∫ a (t ) dt
t0
Nota x(t) à Derivata à v(t) à Derivata à a(t)
Ø a non è costante à moto vario à a(t)
Nota a(t) à Integrale à v(t) à Integrale à x(t)
Ø a > 0 à la velocità cresce
Ø a < 0 à la velocità decresce
Se conosciamo l accelerazione in funzione della posizione (a(x)):
L accelerazione è legata a la forza (Newton, Dinamica)
dv dv dx dv
=
=
v
dt dx dt dx
⇒ a ( x ) dx = v dv
E il segno di v quello che da il verso del moto (e non quello dell accelerazioe!)
Unità di misura:
a( x) =
[a]=[v]/[t]=m/s2
- Cinematica -
19
x2
v2
x1
v1
1
∫ a( x) dx = ∫ v dv = 2 (v
2
2
− v12 )
- Cinematica -
20
10
a = cost
Moto rettilineo: esempi
L accelerazione non cambia nel tempo
t
t
v (t ) = v0 + ∫ a (t )dt = v 0 + a ∫ dt = v 0 + a (t − t0 )
t0
t0
Legge oraria del moto rettilineo uniformemente accelerato
t
t
x(t ) = x0 + ∫ v (t )dt = x0 + ∫ [ v 0 + a (t − t0 )]dt
t0
t0
= x0 + v 0 (t − t0 ) + 12 a (t − t0 )2
- Cinematica -
a=cost
a≠cost
moto rettilineo accelerato
moto rettilineo uniformemente accelerato
Moto rett. uniformemente accelerato
21
- Cinematica -
22
11
esempio
esempio
Esercizi : metodo .
-Disegno/schizzo
-sistema di riferimento con dati iniziali
-strategia e leggi.
Esercizi : metodo .
-Disegno/schizzo
-sistema di riferimento con dati iniziali
-strategia e leggi.
2.01 Un oggetto e sparato verso l alto in direzione verticale con velocita
di 98 m/s dalla sommita di un edifico alto 100 m. Trovare
a) la massima altezza raggiunta rispetto il suolo,
b) il tempo necessario per raggiungere tale altezza,
c) la velocita quando raggiunge il suolo, e
d) il tempo totale necessario per raggiungere il suolo.
Esempio 1.4 testo
Due punti materiali si muovono sullo stesso asse nello stesso verso con velocita’ v1
e v2 con v2>v1. Il primo all’istante t=0 e’ dietro al secondo a distanza d e inizia a
frenare con accelerazione a negativa , a=-a0 . Determinare la relazione tra v1, v2,d
ed a affinche’ il primo punto non tamponi il secondo.
Risultati :
x(max)= 590 m
t(max)= 10 s
v(suolo+)=107.41m/s
t(suolo) =-0.96 e 20.06 m/s
( esempio a=-4m/s2, v1=100km/h, v2=50km/h risposta ;dmin= )
Esercizio proposto. Un sasso e lanciato verso l alto dal tetto di un edificio
con velocita v0=14.7 m/s e tocca terra in un tempo t3= 5s. Calcolare la
velocita finale, l altezza dell edificio e la massima altezza raggiunta. Risp
vf=34.3 m/s ; h0 = 50m , hmax= v02/2g=11.02 m/s (tmax=1.5 s)
- Cinematica -
23
- Cinematica -
24
12
Moto verticale di un punto
Moto verticale (Esempio 2)
Sperimentalmente è un moto con accelerazione costante
x
a = g = 9.8 m/s 2
Corpo lanciato da terra verso l alto con velocità iniziale v0
(vero in assenza di attrito dell aria)
Condizioni iniziali
x
x(t ) = v0t −
x (t ) = x0 + v 0 (t − t0 ) + 12 a (t − t0 ) 2
v0
v(t ) = v 0 + a(t − t0 )
h
1
2
gt 2
v(t ) = v0 − gt
tempo di salita (v=0) t (v = 0) = v0 / g = 2h / g
x(v = 0) = h =
v 02
2g
x0 = h, v0 = 0, t0 = 0, a = − g
Condizioni iniziali
x(t ) = h −
x0 = 0, v0 > 0, t0 = 0, a = − g
altezza massima (v=0)
Esempio 1 : corpo che cade da un altezza h con v0 = 0
x
1
2
Ø nel istante t(v =0), siamo nell esempio 1
v (t ) = gt
gt 2
Ø il tempo di salita è uguale al tempo di caduta
Ø l’altezza raggiunta dipende dal quadrato della velocità
2h
g
tempo di caduta (x=0)
t ( x = 0) =
velocità al suolo (x=0)
v( x = 0) = 2 gh
Ø la velocità al suolo è uguale alla velocità di partenza v0
- Cinematica -
25
- Cinematica -
26
13
Moto armonico semplice (oscillatore armonico)
Il moto segue la legge oraria
-A
0
periodo T
A
La velocità e l’accelerazione nel moto armonico semplice
x (t ) = A sin(ω t + ϕ )
A : ampiezza ≡ max. valore di x
x(t ) = A sin(ω t + ϕ )
ω t + ϕ : fase
ω : pulsazione
ϕ : fase iniziale ≡ fase per t = 0
v (t ) =
dx
⇒ v (t ) = ω A cos(ω t + ϕ )
dt
Massima al centro, nulla agli estremi,
valore massimo: ωA
MOTO PERIODICO: la funzione seno e periodica.
Il punto descrive un oscillazione
x
dv
⇒ a (t ) = −ω 2 A sin(ω t + ϕ )
dt
= −ω 2 x (t )
a (t ) =
Il periodo T dell oscillazione viene dato da:
per definizione di periodo
T = t2 − t1 ⇒ x(t 2 ) = x(t1 )
allora le fasi devono essere
⇒ ω t 2 + ϕ = ω t1 + ϕ + 2π
⇒ t2 − t1 = 2π / ω = T
definiamo la frequenza
υ=
1
ω
=
T 2π
- Cinematica -
27
Massima agli estremi, nulla al centro,
valore massimo: ω2A
in opposizione di fase rispetto x
- Cinematica -
28
14
Moto armonico
Moto armonico
(cont.)
(cont.)
Le soluzioni seno e coseno sono equivalenti se l argomento
e sfasato di π/2 , infatti
x (t ) = A sin(ω t + ϕ ) = A cos(ω t + ϕ − π / 2)
x (t ) = A cos(ω t + ϕ 1)
ϕ1 = ϕ − π / 2
Possiamo usare la funzione seno oppure coseno come legge
oraria di un moto armonico , si dovra solo considerare la
fase opportuna.
- Cinematica -
29
30
- Cinematica -
15
Moto armonico
Moto armonico
(cont.)
i)
Condizioni iniziali: esempi di calcolo della fase e dell ampiezza
Sia dato un moto armonico di frequenza ω data.
ii) posizione iniziale nulla con velocità iniziale non nulla:Scegliamo x (t ) = A sin(ω t + ϕ )
:
⇒
v0
x ( t = 0) = 0.
v ( t = 0) ≡ v 0 > 0.
x (t = 0) = A sin ϕ = 0.
−
v (t = 0) = ωA cosϕ ≡ v 0
ϕ = 0.
⇒
A = v0 / ω
⇒
v0
x (t ) =
x (t ) =
v0
ω
v0
ω
sin ωt
sin ωt
t
−v0 / ω
⇒
- Cinematica -
31
x
v0
ω
ω
sin ϕ = 0. → cosϕ = 1
⇒ ωA = v
0
x (t )
v0 / ω
0.
l’oscillazione avviene con ampiezza
A = v0 / ω
- Cinematica -
32
16
Proiezione su assi ortogonali
di un moto circolare uniforme
Equazione differenziale del moto armonico semplice
a(t ) = −ω 2 x(t )
Moto armonico: proiezione sugli assi ortogonali di un
moto circolare uniforme
la velocità angolare
ω=
dϑ (t )
=
dt
Abbiamo visto che
costante del moto circolare
P
⇔ x(t ) = A sin(ω t + ϕ )
⇔ x(t ) = A cos(ω t + ϕ )
d 2x
= −ω 2 x(t )
dt 2
costituisce la pulsazione ω del moto armonico:
y
dv d 2 x
= 2
dt
dt
a(t ) =
ϑ (t) = ω t + ϑ0
Dalle condizioni iniziali si possono calcolare A, ω e φ e viceversa:
R
x(0) = A sin ϕ
v(0) = ω A cos ϕ
1) note A, ω e φ, allora, per t=0
ϑ(t)
x
a(0) = −ω 2 sin ϕ
x(t) = Rcos[ ϑ (t)] =
= R cos[ ω t + ϑ0]
x0 = A sin ϕ , v 0 = ω A cosϕ , a0 = −ω 2 A sin ϕ
2) note le condizioni
iniziali
x(0) = x0, v(0) = v0
a(0) = a0
- Cinematica -
tan ϕ =
ω x0
v0
, A = x0 +
v0
ω2
,ω = −
a0
x0
33
- Cinematica -
34
17
Moto smorzato esponenzialmente (1)
a
v
Moto smorzato esponenzialmente (2)
Calcoliamo come varia la velocità in funzione della posizione: v ( x )
L accelerazione è di segno opposto alla velocità e
proporzionale ad essa:
a=
a = −k v
x
Calcoliamo la velocità a partire dall’accelerazione (integrazione)
dv
a=
= −k v
dt
v
t
dv
∫ v = −k ∫0 dt
v0
v0
dv = −k vdt
v
ln = −k t
v0
dv dv dx dv
=
=
v = −k v
dt dx dt dx
v
dv
= −k
dx
dv
= −k dt
v
x
∫ dv = −k ∫ dx
dv = −k dx
v0
x0
v( x) = v 0 − k ( x − x0 )
La velocità decresce linearmente nello spazio
v (t ) = v 0 e − k t
Il punto si ferma (v=0) nella posizione xf
(poniamo x0 = 0)
xf =
La velocità decresce esponenzialmente
nel tempo ed il punto al limite si ferma
- Cinematica -
35
v0
k
v
v0
xf
x
- Cinematica -
36
18
Moto smorzato esponenzialmente (3)
Quanto tempo impiega a fermarsi?
(A rigore un tempo INFINITO!!!)
Moto smorzato esponenzialmente (4)
v (t ) = v 0 e − kt = 0 ⇒ t → ∞
In realtà lo smorzamento esponenziale è molto rapido:
vale:
e-kt
1
per t = 0
1/e = 0.368
t = 1/k
1/e2
t = 2/k
1/e3 = 0.05
t = 3/k
1/e5 = 0.0067
t = 5/k
Per determinare
x(t) integriamo:
v (t ) = v 0 e − kt
Chiamando τ = 1/k
COSTANTE DI TEMPO
Dopo t ~ 5 τ la velocità
è quasi trascurabile
t
x(t ) = x0 + ∫ v 0e −kt dt
v0
k
1 − e − kt
0
x (t ) =
Se x0 = 0
x (t ) = −
e
v 0 −kt t v 0
[e ]0 = (1 − e −kt )
k
k
− kt
- Cinematica -
v0
(1 − e −kt )
k
37
- Cinematica -
38
19
Nota sulle equazioni differenziali (1)
Nota sulle equazioni differenziali (2)
Equazione differenziale: relazione in cui compaiono:
1. derivate di una funzione
2. eventualmente la funzione stessa e/o termini noti
iii)
Risolvere un equazione differenziale vuol dire trovare le funzioni che soddisfano la relazione
Le funzioni seno
e coseno
Esempi:
i)
dx
= costante
dt
ii)
d x
= costante
dt 2
quali sono le funzioni la cui derivata seconda
è proporzionale all’opposto della funzione stessa?
x(t ) = A sin(ω t + ϕ )
x(t ) = A cos(ω t + ϕ )
MOTO ARMONICO
SEMPLICE
quali sono le funzioni con derivata costante?
x(t ) = b t + c
Le funzioni lineari
2
d 2x
= -ω 2 x
dt 2
MOTO RETTILINEO
UNIFORME
iv)
quali sono le funzioni con derivata seconda costante?
Le funzioni quadratiche
x(t ) = d t 2 + b t + c
dx
= ±k x
dt
quali sono le funzioni la cui derivata è proporzionale
alla funzione stessa o all’opposto?
Le funzioni esponenziali
x(t ) = e ± kt
MOTO SMORZATO
ESPONENZIALMENTE
MOTO RETTILINEO
UNIFORMEMENTE
ACCELERATO
- Cinematica -
39
- Cinematica -
40
20
. Moti con - e")