Politecnico di Milano
Dipartimento D.I.I.A.R. - Sezione Idraulica
Note degli insegnamenti di:
Meccanica dei Fluidi
Corso di Studi in Ingegneria Meccanica - IV Facoltà di Ingegneria
Capitolo 09:
Dinamica dei fluidi viscosi non turbolenti
a cura di : Prof. Stefano Malavasi, ing. Cristiano Piccinin
Riferimenti Bibliografici di questa sezione:
CITRINI NOSEDA:
• 6.1, 6.2, 6.3, 6.4;
CENGEL-CIMBALA:
• 4.4 fino a pag.127;
• 9.5, 9.6.
Operatori Matematici
eq. Eulero (3D)
F a grad p
s
p V 2
z
0
2
g
= cost
2
p
V
F=g
z gr
n
/t = 0
p
z
0
b
= 0 (fluido ideale)
d
W
≠ 0
3D?
1D
Estensione
alle correnti
r
(/n=0)
p
idrostatica
sul piano s
Bilancio quantità di moto - forma indefinita
x y z
F a
x
y
z
Bernoulli x traiettoria
1D
p V2
z
0
s
2g
Estensione
ai fluidi REALI
( & )
p
V2
z
J H
s
2g
Bernoulli x correnti di fluidi reali
2b
conservazione della massa
(eq. continuità)
u v w
0
t
x
y
z
forma
indefinita
k
x
y
j
i
yz
y
k
z
xy
xx
yx
x
j
zz
zx
zy
y
x
z
F a
x
y
z
xy yx z
Equilibrio dei
xz zx y
momenti
yz zy x
xz
yy
i
bilancio quantità di moto
(equilibrio dinamico)
z
xx
yx
zx
xy
yy
zy
xz x
yz z
zz y
z
y
x
y
x
z
1
conservazione della massa
(eq. continuità)
forma
indefinita
u v w
0
t
x
y
z
xy yx z
xz zx y
yz zy x
xx x
yy y
zz z
Continuità (1)
Equilibrio dinamico (2) + (3) + (4)
Eq. di stato
p, T (5)
(1)
bilancio quantità di moto
(equilibrio dinamico)
y
x
z
F a
x
y
z
du x z y
F
x
dt
x
y
z
dv z y x
Fy
dt
x
y
z
dw y x z
Fz
dt x y
z
(2)
(3)
(4)
5 Equazioni in 10 incognite (, u, v, w, x,y,z,x,y,z)
Mancano 5 equazioni: Legame sforzi – velocità di deformazione
2
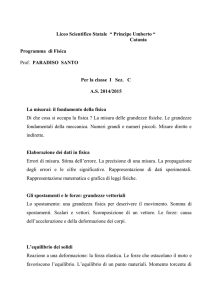
Analisi deformazioni del fluido
Analisi cinematica del movimento/deformazione
z
t = t0
P (x+dx, y+dy, z+dx)
P0(x, y, z)
0
y
velocità di due punti al tempo t=t0
x
v 0 (P0 ) v 0 ( x, y , z, t0 )
v (P) v ( x dx, y dy , z dz, t0 )
Analisi deformazioni del fluido
z
t = t0
v 0 (P0 ) v 0 ( x, y , z, t0 )
P (x+dx, y+dy, z+dx)
v (P) v ( x dx, y dy , z dz, t0 )
P0(x, y, z)
0
y
x
Scrivendo la velocità del punto P rispetto al punto P0 in forma differenziale si ottiene:
v
Utilizzando la
scrittura tensoriale
dx
d x dy
dz
v
0
v
x
x , y , z ,t 0
v
d x
y
x , y , z ,t 0
v
d y
z
dz
x , y , z ,t 0
v v0 A dx
T
u
v v
w
A grad
v
u
x
u
y
u
z
v
x
v
y
v
z
w
x
w
y
w
z
3
Analisi deformazioni del fluido
Riscrivendo i termini extra-diagonali del grad v
u
x
u 1 v 1
grad v
y 2 x 2
u 1 w 1
z 2 x 2
v
x
w
x
grad v D
u
x
1 u v
D
2 y x
1 u w
2 z x
1 v u
2 x y
v
y
1 w v
2 y z
Tensore delle velocità di
deformazione
(sommando e sottarendo la stessa quantità)
v 1 u 1
x 2 y 2
v
y
v 1 w 1
z 2 y 2
u
y
w
y
w 1 u 1
x 2 z 2
w 1 v 1
y 2 z 2
w
z
u
z
v
z
D matrice simmetrica
= matrice emisimmetrica
1 w u
0
2 x z
1 w v
1 u v
2 y z
2 y x
w
1 u w
2 z x
z
1 v u
2 x y
0
1 v w
2 z y
1 w u
2 x z
1 w v
2 y z
0
Tensore delle rotazioni rigide
4
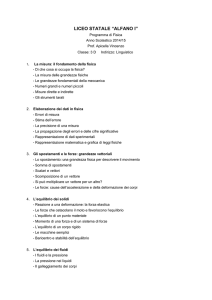
Significato fisico termini diagonali di D
u
dxdt
x
y
R
Q
Analisi del caso di MOTO PIANO
Q’
O
dy
O
dx
x
Effetto di
u
x
Analogamente per
d x u
dt
x
w
v
e
z
y
P
u
u
dx ;
x
Q
u
u
u
dx
dy ;
x
y
R
u
u
dy ;
y
P’
P
u
dx dt
x
d x
dx
velocità nulla (evidenzio solo le
velocità relative)
v
v
dx
x
v
v
v
v
dx
dy
x
y
v
dy
y
Allungamento unitario subito dal cilindretto di lunghezza
infinitesima dx nel tempo dt
Velocità di deformazione lineare lungo l’asse x
d y
dt
v
y
d z w
dt
z
(Caso 3D)
5
Significato fisico termini diagonali di D
Nel caso 3D, l’effetto dell’azione simultanea delle componenti diagonali di D
equivale ad una espansione di volume
u
v
w
dW dx
dxdt dy dydt dz
dzdt dxdydz
x
y
z
w v u
dW
termini di ordine superiore dxdydz dt
z y x
Considerando solo i temini del primo ordine:
w v u
dW
dt
W
z y x
La Velocità di deformazione per unità di volume
w v u
dW 1
div v
dt W
z y x
Rappresenta la dilatazione volumetrica dell’elemento di fluido, senza
cambiamento di forma
Se il fluido è incomprimibile
div v 0
Nessuna variazione
di volume
6
Significato fisico dei termini extradiagonali del tensore D
z
u
dydt
y
y
R’
y
x
R
Nel piano xy
Q
u
dt
y
O’ v dt
O
v0 u i v j w k
u
v
w
v P u dx i v dx j w
dx k
x
x
x
u
v
w
v R u
dy i v dy j w
dy k
y
y
y
v
dxdt
x
P’
u dt
v
dt
x
P
x
u v
d z dt
y x
u v
d z
dt
y x
Deformazione
dell’angolo retto in O’
Velocità con cui avviene
la deformazione
angolare
I termini extradiagonali del tensore rappresentano la velocità di deformazione angolare
7
Significato fisico dei termini extradiagonali del tensore
u
v
y
x
Caso particolare
d z
0
dt
La rotazione avviene senza deformazione (rotazione rigida) con velocità angolare:
v
dx dt
v
u
x
dx dt
x
y
u
v
dydt
dxdt
y
x
y
R’
R
Q
u
dt
y
P’
u dt
O’ v dt
O
P
v
dxdt
x
v
dt
x
x
1) La velocità di deformazione angolare è
il doppio dei termini extradiagonali del
tensore D (se la rotazione è rigida questo
termine è nullo infatti u v )
y
1 u v
2 y x
x
2) I termini non nulli di descrivono
la velocità di rotazione rigida
dell’elemento fluido
1 v u
2 x y
8
Analisi deformazioni del fluido
In definitiva
v v0 A dx
T
v x v x0
T
x d x
0
D x0 dx
Ma:
1
d x rot v d x
2
T
1
v x v x 0 D x 0 d x rot v d x
2
9
Analisi deformazioni del fluido
passaggio matematico:
Ω dx
T
v w
w v
1 u v
1 v u
1 w u
u w
d
y
d
z
i
d
x
d
z
j
d
x
dy k
z y
2 y x
z
x
2
x
y
2
x
z
y
z
i
j
1 w v
2 y z
dx
u w
z x
dy
k
v u
x y
dz
Ricordando la definizione di rotore del vettore velocità
i
1
1
ω rot v
2
2 x
u
j
y
v
k
1 w v
1 u w
1 v u
i
j k
z 2 y z
2 z x
2 x z
w
ωx
e che
i
b c bx
j
by
k
bz
cx
cy
cz
ωy
dx
T
ωz
1
rot v d x
2
10
Analisi deformazioni del fluido
v x0
è la componente del vettore velocità che da luogo ad una traslazione rigida
1
rot v d x
2
è la componente del vettore velocità che da luogo ad una rotazione
rigida con velocità angolare
1
rot v
2
Il tensore viene detto tensore delle velocità di rotazione rigide.
Un moto si dice irrotazionale se 0
D x0 dx
è la componente del vettore velocità che da luogo ad una
deformazione locale. Il tensore D viene detto tensore delle velocità
di deformazione
L’elemento fluido nel suo moto subisce una traslazione, una
rotazione rigida ed una deformazione
11
Fluido Newtoniano isotropo
Ora andiamo a considerare lo stato di sforzo:
xx
yx
zx
xy
yy
zy
xz x
yz z
zz y
z
y
x
y
x
z
Da quali parametri dipende?
Storia passata del fluido (per fluidi con molecole semplici gli stati di sollecitazione permangono per t*<
=f
nanosecondi, quindi per problemi comuni della meccanica dei fluidi tempi trascurabili)
Stato di deformazione locale (se non conta la memoria la sollecitazione futura non può dipendere da
quella attuale)
Velocità della deformazione locale
Posso cercare di definire un modello che soddisfi i seguenti requisiti:
Modello
di Stokes
f (D )
pI
Lo stato di sforzo dipenda dalle velocità di deformazione
Il modello deve soddisfare il caso più semplice di
sollecitazione: condizioni statiche.
12
Fluido Newtoniano isotropo
Il legame tra sforzi e velocità di deformazione non deve dipendere dal
sistema di riferimento!
E sempre possibile sceglier una
terna di riferimento tale per cui
D sia un tensore diagonale
Anche
u
x
D 0
0
0
v
y
0
0
D xx
0 0
w 0
z
0
D yy
0
0
0
D zz
z
v
deve assumere forma diagonale.
Infatti: rotazione rigida attorno all’asse x
~
xx
u u~
v v~
w w~
~
y y ~
z z
D
~x ~x
D
~y ~y
D
~z ~z
~y
u~
u
D xx
~x
x
v~
v
v
~
D yy
y
y
y
w~
w
w
~
D zz
z
z
z
y
x ~x
~z
Nel nuovo sistema di riferimento D è ancora diagonale e
presenta le medesime componenti
13
Fluido Newtoniano isotropo
Se si considera la componente y del
vetore x e lo stesso cambiamento di
coordinate già considerato:
~
xx
~
y y ~
z z
allora si può scrivere :
(1)
xy ~x~y
Ma visto che le componenti del tensore
sono identiche ed il legame funzionale
non dipende dall’orientamento degli assi
x
~y
y
x ~x
xy f D xx , D yy , D zz
~x~y f D ~x ~x , D ~y~y , D ~z ~z
allora deve valore anche la : (2)
xy ~x~y
La condizione per cui valgolo sia la
(1) che la (2) è quindi :
xy ~x~y 0
14
Fluido Newtoniano isotropo
In generale lo stato di sforzo che soddisfi le posizioni descritte si può scrivere come:
x
0
0
0
y
0
0
0
p 0 0 x p
0 p 0 0
p
0
y
z 0 0 p 0
0
z p
0
0
Parte statica
Tensore DEVIATORE DEGLI
SFORZI (originato dal moto)
IL legame/modello più semplice tra sforzi e velocità di deformazione è quello
lineare:
Legame lineare fra e D
Fluido
Newtoniano
Forma più generale di legame lineare
x p xx D xx xy D yy xz D zz
y p yx D xx yy D yy yz D zz
z p zx D xx zy D yy zz D zz
15
Fluido Newtoniano isotropo
I coefficienti ij non sono tutti distinti, infatti cambiando 2 volte sistema di riferimento
~
xy
~
~
xy
~
yz
~
~
yx
~
zx
~
~
z z
E’ cambiato solo il
nome degli assi
Mutano le componenti di
e D ma non i loro valori
~
z ~y ~z
D xx D ~z ~z D ~~y~~y
~
y ~x ~x
x ~z ~~y
D yy D ~x ~x D ~~x ~~x
y ~x ~~x
D zz D ~y~y D ~~z ~~z
z ~y ~~z
~
x ~z ~y
xx = yy = zz = ’ -2
convenzione
xy = xz = yx = yz = zx = zy = ’
16
Fluido Newtoniano isotropo
Possiamo quindi scrivere
u v w
u
2
x
x y z
x p '2 D xx ' D yy ' D zz '
y p ' D xx '2 D yy
z p ' D xx ' D yy
u v w
v
2
' D zz '
y
x y z
u v w
w
2
'2 D zz '
z
x y z
p I ' div v I 2 D
p ' div v I 2 D
Equazione costituiva dei fluidi Newtoniani
valida per qualunque terna di riferimento
17
Significato fisico di
1 u w
xz y 2 D xz 2
2 z x
z
dt
Legge di Newton
viscosità dinamica
u
dzdt
z
z
C
d y
C’
C
O
A
y
u
dt
z
A’
u dt
x
O’ w dt
O
v 0 t t0 u i v j w k
u
v
w
v A t t0 u dx i v dx j w
dx k
x
x
x
u
v
w
v C t t0 u dz i v dz j w
dz k
z
z
z
w
dxdt
x
w
dt
x
A
x
d y
u w
dt
z
x
18
Significato fisico di ’
Esplicitiamo le componenti normali di sforzo
x
y
x
y
x
z
z
u
x
v
p ' div v 2
y
w
p ' div v 2
z
p ' div v 2
x + y + z = 3p
invariante
u
v w
3 p 3 ' div v 2
z
x y
y
z
3 p 3 ' 2 div v
2
' div v 0
3
1)
div v 0
2)
'
fluido incomprimibile
2
3
: responsabile di dissipazioni energetiche in un fluido isotermo che subisce
deformazioni angolari
’: legato a variazioni di volume
19
Equazione del moto per fluidi Newtoniani
Nabla
FA
2
p
div
3
v I 2 D
p I T p I
T
x
p
x
p
y
p
z
y
j k ;
x
y
z
Eq. Reologica
(legame sforzi deformazioni)
2
div
F A div p
3
div
T
x y z
div Φ Φ T Φ Eq. dei Momenti
x
y
z
i
v I 2 D
p
0
z
0
0
p
0
0
0
p
p
p
p
i
j
k grad
x
y
z
T
p
x
p
y
p
z
T
p
20
Equazione del moto per fluidi Newtoniani
2
div div
3
2
v I
grad
3
div
v
2
grad
3
div v
Hp: uniforme
div
2 D
2
T
D T
2 u 1 2 u 2 v 1 2 u 2 w
2 2 2
2 z 2 xz
x
2
x
y
y
2u 2u 2 v 2u 2 w
2
2 2 2
x
y
xz
x
y
z
2 v 2u
2v 2 w 2v
2
2 2
2
y
x
y
z
x
y
z
2
2
2
2
w u w v
2w
2 zx 2 zy 2 2
y
z
x
2
x
y
u
x
1 u v
z 2 y x
1 u w
2 z x
1 2 v 2u 2 v 1 2 w 2 v
2 x 2 yx y 2 2 yz z 2
1 v u
2 x y
v
y
1 w v
2 y z
1 w u
2 x z
1 w v
2 y z
w
z
T
1 2 w 2 u 1 2 w 2 v 2 w
2 x 2 zx 2 y 2 zy z 2
u v w 2 u 2 u 2 u
2 2 2
x
x
y
z
y
z
x
2
2
u v w v v 2 v
2 2 2
y
z
y x y z x
2
2
u v w w w 2 w
z x y z 2 2 2
y
z
x
T
2
div
v
u
x
divv 2 v
y
2
div
v
w
z
21
Equazione del moto per fluidi Newtoniani
In definitiva:
div
2 D
2
v grad
div v
2
2
2
Laplaciano 2 2 2 ;
x
y
z
2
F A grad p
Sostituendo:
2
grad div v 2 v grad div v
3
Equazione del moto per fluidi Newtoniani
1
F A gradp grad divv 2 v
3
d
divv 0
dt
Eq. Momenti + reologica
Eq. di Continuità
Eq. di Stato + ( Condizioni al contorno & Condizioni iniziali)
22
Equazione di moto dei fluidi Newtoniani incomprimibili
Per fluidi incomprimibili:
d
cost
0
dt
Eq. di Stato
divv 0
Eq. di Continuità
Eq. di Navier Stokes
F A gradp 2v
Eq. Momenti + reologica
+ Condizioni al contorno + Condizioni iniziali
Nota: Per fluidi newtoniani incomprimibili e non viscosi ( trascurabile
ovvero lontano da pareti o per velocità elevate), l’equazione di NS si
riduce all’equazione di Eulero
23
Equazione di moto dei fluidi Newtoniani incomprimibili
F A gradp 2v
Eq. di Navier Stokes
v
v
v
v
F
u
v
w grad p 2 v & div v 0
t
y
z
x
vis cos ità cinematica
2u 2u 2u 1 p
u
u
u
u
u v w 2 2 2 Fx
t
x
y
z
y
z x
x
2v 2v 2v 1 p
v
v
v
v
u v w 2 2 2 Fy
t
x
y
z
y
z y
x
2 w 2 w 2 w 1 p
w
w w
w
u v w 2 2 2 Fz
t
x
y
z
y
z z
x
u v w
0
x y z
sistema di 4 eqq. differenziali alle derivate parziali nello
spazio e nel tempo per le 4 incognite (u, v, w, p)
24
Moto permanente in tubi circolari cilindrici
Definire i parametri che caratterizzano il moto:
- distrib. di velocità;
z
- Portata;
- sforzo sul cotorno.
n
v=w=0
n
u
0
t
y
u
y
x
Fx g
z
x
Fy g
z
y
Fn g
z
n
Eq. di Navier Stokes + Eq. di continuità
2u 2u 2u 1 p
u
u
u
u
u v w
Fx
2
2
2
t
x
y
n
x
y
n
x
2v 2v 2v 1 p
v
v
v
v
u v w
Fy
2
2
2
t
x
y
n
y
y
n
x
2w 2w 2w 1 p
w
w w
w
u
v w
Fz
2
2
2
t
x
y
n
y
n n
x
u v w
0
x y n
25
Moto permanente in tubi circolari cilindrici
n
n
v=w=0
u
0
t
u
y
y
x
Fx g
2u 2u 2u 1 p
u
z
u 2 2 2 g
x
x
y
n x
x
1 p
z
0 g
y
y
1 p
z
0 g
n
n
u
0
x
z
x
Fy g
z
y
Fn g
z
n
2u 2u
p
z
2
2
x
y
n
p
z 0
y
p
z 0
n
u
0
x
25
Moto permanente in tubi circolari cilindrici
n
n
v=w=0
u
0
t
u
y
y
x
Fx g
u
0
x
u = f (y, n)
z
x
Fy g
z
y
Fn g
z
n
Moto uniforme lungo x
Dalle ultime due equazioni si evidenzia che il carico piezometrico h definito come
hz
p
È uniforme su ogni piano ortogonale all’asse x
p
z 0
y
p
z 0
n
La pressione varia con legge idrostatica lungo ogni sezione trasversale della condotta
26
Moto permanente in tubicircolari cilindrici
Il carico piezometrico varia lungo x in accordo con la proiezione lungo l’asse x
dell’equazione di Navier Stokes
2u 2u
p
z
2
2
x
y
n
Detto:
J
p
z
x
Per determinare la distribuzione della velocità longitudinale u su ciascuna sezione
trasversale bisogna integrare l’equazione
2u 2u
J
2
2
y
n
Eq. di Poisson
Necessarie: le condizioni cinematiche al contorno
27
Moto permanente in tubi circolari cilindrici
n
2
2
Conviene ricorrere alle coordinate cilindriche: r n y ; arctg
y
n
r
2u
y
2
2u
n
2
1 u 1 2u
J
r 2
r r r r 2
r0
y
per simmetria
1 d du
r J
r dr dr
Imponendo
du
0
dr
Integrando d r du Jrdr
dr
per
du
r
J
dr
2
r0
du
r2
r
J
C
dr
2
C=0
r2
u J
C2
4
e Considerando la condizione al contorno
u
u =0
J r02 r 2
4
per r = r0
r02
C2 J
4
28
Moto permanente in tubi circolari cilindrici
+r0
r
umax
u
x
J r02 r 2
4
u max
J r02
4
u
r=0
Integrando si ricava la portata
A
LPZ
r
(r)
J
r
2
0
128
Q 2rudr
Formula di Pouseuille Q A u dA
velocità media
r0
V
J D4
Q
1
2
J
D
u max
2
2
r0 32
p
Sforzo tangenziale alla parete 0 u
Jr0
r
2
r r0
=2 (moto laminare)
29
Moto permanente tra due piani parallaeli indefiniti
Definire i parametri che caratterizzano il moto:
- distrib. di velocità;
- Portata;
- sforzo sul cotorno.
v=w=0
u
0
t
z
y
x
b
u
b
z
x
z
Fy g
y
z
Fz g
z
Fx g
Eq. di Navier Stokes + Eq. di continuità
2u 2u 2u 1 p
u
u
u
u
u v w 2 2 2 Fx
t
x
y
z
x
y
z
x
2v 2v 2v 1 p
v
v
v
v
u v w 2 2 2 Fy
t
x
y
z
y
y
z
x
2 w 2 w 2 w 1 p
w
w w
w
u v w 2 2 2 Fz
t
x
y
z
y
z z
x
u v w
0
x y z
30
Moto permanente tra due piani parallaeli indefiniti
Definire i parametri che caratterizzano il moto:
- distrib. di velocità;
- Portata;
- sforzo sul cotorno.
v=w=0
u
0
t
n
y
x
b
u
b
z
x
z
Fy g
y
Fx g
Fn g
z
n
Eq. di Navier Stokes + Eq. di continuità
2u 2u 2u 1 p
u
u
u
u
u v w 2 2 2 Fx
t
x
y
z
x
y
z
x
2v 2v 2v 1 p
v
v
v
v
u v w 2 2 2 Fy
t
x
y
z
y
y
z
x
2 w 2 w 2 w 1 p
w
w w
w
u v w 2 2 2 Fz
t
x
y
z
y
z z
x
u v w
0
x y z
31
Moto permanente tra due piani parallaeli indefiniti
Definire i parametri che caratterizzano il moto:
- distrib. di velocità;
- Portata;
- sforzo sul cotorno.
v=w=0
u
0
t
n
y
x
b
u
1 p
z
g
y
y
1 p
z
0 g
n
n
u
0
x
0 -
Fn g
b
2u 2u 2u 1 p
u
z
u 2 2 2 g
x
x
y
n x
x
Per simmetria
z
x
z
Fy g
y
Fx g
z
n
2u 2u
p
z
2
2
x
y
n
p
z 0
y
p
z 0
n
u
0
x
32
Moto permanente tra due piani parallaeli indefiniti
Definire i parametri che caratterizzano il moto:
- distrib. di velocità;
- Portata;
- sforzo sul cotorno.
v=w=0
u
0
t
n
y
b
u
x
u
0
x
p
hz
Fn g
b
u = f(n)
z
x
z
Fy g
y
Fx g
z
n
Moto uniforme lungo x
È uniforme su ogni piano ortogonale all’asse x
p
z 0
y
p
z 0
n
La pressione varia con legge idrostatica lungo ogni sezione trasversale delle lastre
33
Moto permanente tra due piani parallaeli indefiniti
Definire i parametri che caratterizzano il moto:
- distrib. di velocità;
- Portata;
- sforzo sul cotorno.
v=w=0
u
0
t
n
y
x
b
u
z
x
z
Fy g
y
Fx g
Fn g
b
z
n
Il carico piezometrico varia lungo x in accordo con la proiezione lungo l’asse x dell’equazione
di Navier Stokes
d 2u
dn2
d
p
z
dx
e detto:
J
d
p
z
dx
Per determinare la distribuzione della velocità longitudinale u su ciascuna sezione trasversale
bisogna integrare l’equazione
d 2u
Eq. di Poisson
- J
dn 2
Imponendo le condizioni cinematiche al contorno
du
0
dn
per
n0
u = 0 a contatto con la parete
34
Moto permanente tra due piani parallaeli indefiniti
d 2u
dn 2
-
J
du
J
n
dn
Integrando e ponendo du/dn=0 per n=0
Integrando nuovamente e ponendo u=0 per n=b
Distribuzione di velocità di tipo parabolico, conb masssimo
Q 2 u L dn
u
J 2 2
(b n )
2
u max
J 2
b
2
o
La portata si ottiene integrando sulla sezione (per una
larghezza di riferimento L)
b
J b 2 2
2 J 3
Q 2 u L dn
(
b
n
)
dn
Lb
2
3
0
0
Sforzo tangenziale alla parete
u
Jb
n n b
0
35
Integrando sul volume FORMA INTEGRALE
Equazione di Navier Stokes:
dW
v
v
v
v
F
u
v
w grad ( p ) 2 v 0
t
y
z
x
Integro su un volume finito W
Forze di
Superficie
G
W
Forze di
MASSA
I M
p
0
Dove:
G F dW
W
v
I
dW
t
W
36
F F F
y z dW
W x
v
v
v
M u
v
w dW
y
z
W x
Th. Green
F cosnx F cosny F cosnz dW
A
uv
u vv
v wv
w
dW
v
v
v
x
y
y
z
z
W x
div v 0 Hp: fluido incomprimibile
uv vv wv u v w
dW
v
y
z
W x
x y z
u cosnx v cosny wcosnz vn
Th. Green
v u cosnx v v cosny v w cosnz dW
A
v vn dA
A
grad b dW b n dA
W
A
Th. del Gradiente
p
grad p dW
W
p n dA
A
sull’elementino dA:
dp normale
Ancora con Green
v
2 v dW dA
n
W
A
d normale +
tangenziale
37
x y z
Fa
x
y
z
legame sforzi – velocità di
deformazione + = cost
Equazione di Navier - Stokes
2v 2v 2v
F a grad (p) 2 2 2
y
z
x
G p M I 0
GM I 0
p p n dA
v
dA
n
Cosa posso ottenere da questa equazione ?
Esempio: moto in tubo cilindrico circolare
r
vx
v (x, y, z)
v x v x (r)
v y 0
vz 0
legame sforzi tangenziali J : tronco di corrente cilindrica, moto uniforme
equilibrio in direzione del moto:
J
n1 + M1 - n2 + M2 - To - G sin
n1 = p1 + 1
LPZ
n2 = …
s1
v
v
v
0 1
dA 0
A
1
n A1 s A1
n
on
p1/
A p1 = A p2 + To + G sin
dove
p1/ = p2/ + J L + (z2 – z1)
G=AL
p2/
M2
To
2n
G
s
T1=0
L
M1
LCT
1n
z1
L sin
T2=0
z2
z=0
A (J L + L sin) = To + A L sin
To = A L J = W J
o = W/(2RL) J = R J
J = f() J
R = raggio idraulico = A/P
condotta circolare: R = (R2)/(2 R) = R/2
P = perimetro
Diapositiva 45
s1
Vx=Vx(r);
Vy=0
Vz=0
e il versore alla superficie "n" è diretto come "s"
steve; 18/04/2005
dimostrazione precedente, applicata ad una
porzione della corrente (cilindro di raggio r)
on
R
corrente lineare uniforme medesima J
per la corrente intera e per il cilindro
interno, indipendentemente dal valore di r
M2
To
r
G
2n
M1
1n
To
Ao
v
v
v
dA
dA
Ao
Ao
n
r
r
equazioni reologiche
dv
T 2 r L
dr
T W J L A J r 2 L J
J
dv
r dr
2
v
dv
0
J
v (r)
R
4
2
R
r
2
moto uniforme
dv
rJ
dr
2
r
To = W J
J
r dr
2
+R r
v(r)
0
J
v (r)
R
4
+R
2
r
2
R
Q v dA v(r ) 2r dr
A
r
profilo di velocità
parabolico
v(r)
V
Q J 2
R
A 8
v max
J 2
v ( r 0)
R 2V
4
V
LPZ
+R
r
p
(r)
J
r
2
distribuzione : triangolare
distribuzione p : idrostatica
0
J 4
R
8
3
v
dA
A
3
VA
2
8V
V2
J
2
2 gD
R
64
Re
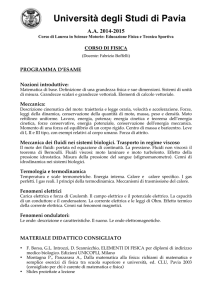
esempi di calcolo (acqua: = 1000 kg/m3 ; = 10-3 Ns/m2)
J
LCT
LPZ
R = 5 cm
R = 5 cm
Q = 0.1 l/s
Q = 10 l/s
L = 100 m
L = 100 m
V = 1.3 cm/s
V = 1.3 m/s
J = 4·10-6
J = 4·10-4
H = J·L = 0.4 mm
H = J·L = 4 cm
R
Q
verifica sperimentale:
OK
J = 1.4·10-2
H = J·L = 1.4 m
???
s2
Diapositiva 48
s2
Moto Turbolento di transizione (imponendo la scabrezza nulla visto che non è data)
steve; 16/05/2007