27/11/2011
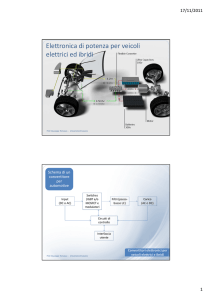
Veicoli ibridi
Prof. Giuseppe Tomasso - Università di Cassino
Panorama
Veicoli a batteria
Veicoli a celle a combustibile
Veicoli convenzionali
Veicoli ibridi
Veicoli a impatto zero
Veicoli su strada: Ibridi
Prof. Giuseppe Tomasso - Università di Cassino
1
27/11/2011
Panorama
Veicoli su strada: Ibridi
Prof. Giuseppe Tomasso - Università di Cassino
Veicoli ibridi
Micro-hybrid
Mild hybrid
Hybrid (serie,
parallelo,
power-split
Plug-in Hybrid
(estensione
range
elettrico)
Start and stop: fermata motore endotermico durante la sosta e riaccensione <400ms
Recupero energia cinetica in frenatura
Assistenza al motore endotermico per la prolulsione
Partenza in «full electric»
Possibilità di guida in modalità
«full-electric»
Veicoli su strada: Ibridi
Prof. Giuseppe Tomasso - Università di Cassino
2
27/11/2011
Veicoli ibridi
Micro-hybrid
Mild hybrid
Hybrid (serie,
parallelo,
power-split
Ibridizzazione finalizzata all’assistena al
motore endotermico principale
Plug-in Hybrid
(estensione
range
elettrico)
Ibridizzazione finalizzata ad una
propulsione elettrica vera e propria
Veicoli su strada: Ibridi
Prof. Giuseppe Tomasso - Università di Cassino
Micro-hybrid
Nel micro-ibrido è presente un sesnore posizionato sul
pedale del freno. Una centralina controlla la velocità del
veicolo e, quando questa è pari a zero ed è premuto il
pedale del freno, il motore a combustione interna viede
«spento». Nel momento in cui si rilascia il pedale del
freno, in meno di mezzo secondo un motore elettrico
riavvia istantaneamente (con un tempo inferiore a
400ms nel dispositivo VALEO, ad es.) l’endotermico.
I micro-ibridi sono solitamente equipaggiati con motori
elettrici «convenzionali», solitamente a megneti
permenenti e con una tensione di oltre 100V. Le potenze
si aggirano intorno ai 2kW.
I motorini di avviamento «tradizionali» sono alimentati a
12 o a 42V e sono solitamente motori in servizio di
«durata limitata». Ad es. possono andare da 500W a
oltre 3-5kW in servizio S2
Veicoli su strada: Ibridi
Prof. Giuseppe Tomasso - Università di Cassino
3
27/11/2011
Mild hybrid
Riescono a garantire una riduzione dei consumi di circa il 10-15%, recuperando energia cinetica
durante la frenatura e usandola per alimentare un motore elettrico di propulsione durante le
accelerazioni. L’accumulo energetico è fatto attraverso pile al litio o, ultimamente, si tende ad
utilizzare superdondensatori. Infatti, la batteria tradizionale non ce la farebbe a gestire i picchi
(positivi e negativi) di corrente per supportare questa modalità operativa.
Veicoli su strada: Ibridi
Prof. Giuseppe Tomasso - Università di Cassino
Mild hybrid
Una evoluzione del «Mild-hybrid» prevede un supporto alla propulsione del motore endotermico
principale durante l’intero ciclo di lavoro, per supportare lo stesso nelle fasi di maggior richiesta di
corrente. Quindi, anche quando il veicolo è in marcia e c’è bisogno di una ulteriore accelerazione (nel
caso precedente, i supercondensatori sarebbero ancora scarichi perché non è interventua una
franatura) il motore elettrico può intervenire come supporto.
Veicoli su strada: Ibridi
Prof. Giuseppe Tomasso - Università di Cassino
4
27/11/2011
Mild hybrid
Veicoli su strada: Ibridi
Prof. Giuseppe Tomasso - Università di Cassino
Plug-in Hybrid
Hybrid (serie, (estensione
range
parallelo,
elettrico)
power-split
Sono presenti due unità di propulsione: una
endotermica e una elettrica.
Possono essere diversamente combinate fra di
loro per ottenere diverse prestazioni in
termini di dinamica, consumi e autonomia.
Veicoli su strada: Ibridi
Prof. Giuseppe Tomasso - Università di Cassino
5
27/11/2011
Hybrid (serie,
parallelo,
power-split
Plug-in Hybrid
(estensione
range
elettrico)
La figura rappresenta la
proprietà
del
motore
termico
intesa
come
rendimento termico in
funzione
della
coppia
erogata.
Le
isole
colorate
rappresentano
aree
di
consumo costante (g/kWh).
La posizione delle aree verdi
evidenzia che più il motore
è sotto carico, migliori sono
le prestazioni in termini di
consumi,
e
così
il
rendimento termico.
Veicoli su strada: Ibridi
Prof. Giuseppe Tomasso - Università di Cassino
Plug-in Hybrid
Hybrid (serie, (estensione
range
parallelo,
elettrico)
power-split
Veicoli su strada: Ibridi
Prof. Giuseppe Tomasso - Università di Cassino
6
27/11/2011
In generale un veicolo è……
Hybrid
Un veicolo
convenzionale
se si…
Un microibrido
Un ibrido
leggero
Un «full
hybrid»
Un ibrido
plug-in
Un ibrido
«potente»
(SUV)
Spegne e si accende
istantaneamente al semaforo o
nel traffico
Se recupera l’energia cinetica
per riutilizzarla in
accelerazione e lavora ad una
tensione maggiore di 60V
Se ha un motore elettrico che
assiste il motore endotermico
nelle fasi di richiesta di
maggiore potenza
Se ha la possibilità di lavorare
per intervalli di tempo in «full
electric»
Se può ricaricare le batterie
dell’esterno, mendiante la
presa di casa o stazioni di
ricarica (con autonomia di
almeno
30 km)
Prof.
Giuseppe
Tomasso - Università di Cassino
Veicoli su strada: Ibridi
Hybrid
Veicoli su strada: Ibridi
Prof. Giuseppe Tomasso - Università di Cassino
7
27/11/2011
Hybrid
Veicoli su strada: Ibridi
Prof. Giuseppe Tomasso - Università di Cassino
Hybrid
serie
Combinato serie/parallelo
parallelo
Veicoli su strada: Ibridi
Prof. Giuseppe Tomasso - Università di Cassino
8
27/11/2011
Hybrid:
serie
La presenza delle batterie e
del supercaps (eventuale)
consente di incidere sulla
dinamica senza aumentare
i consumi.
Il sistema di controllo
dovrà fare in modo di
mantenere il SOC delle
batterie (e degli eventuali
supercaps) fra il 40% e
l’80% circa.
P
Potenza elettrica/uscita
Ricarica batterie
Potenza ICE
recupero
t
ICE ON
ICE OFF
Veicoli su strada: Ibridi
Prof. Giuseppe Tomasso - Università di Cassino
Hybrid:
diesel-elettrico
L’accoppiamento diretto generatore-motore di propulsione è utilizzato principalmente nelle seguenti
applicazioni:
•
Trazione ferroviaria (perché il motore elettrico è l’unico che garantisce una coppia massima e,
comunque, diversa da zero a velocità nulla.
•
Propulsione navale (nelle grosse navi, la trasmissione meccanica fra il gruppo diesel, posizionato al
centro dello scafo per bilanciare il peso, e l’elica di propulsione a volte è impossibile o non
conveniente a causa delle enormi distanze. Si preferisce, quindi, trasmettere energia
t elettrica e non
meccanica, anche perdendo sul rendimento.
Veicoli su strada: Ibridi
Prof. Giuseppe Tomasso - Università di Cassino
9
27/11/2011
Hybrid:
parallelo
Veicoli su strada: Ibridi
Prof. Giuseppe Tomasso - Università di Cassino
Hybrid:
parallelo
A differenza dell’ibrido serie, la
configurazione parallelo consente di
«sommare» le potenze erogate dal
motore endotermico e da quello
elettrico, mantenendo la possibilità
di poter lavorare anche in all-electric
ma anche solo in endotermico.
Veicoli su strada: Ibridi
Prof. Giuseppe Tomasso - Università di Cassino
10
27/11/2011
Hybrid:
parallelo
P
Potenza elettrica/uscita
Ricarica batterie
Potenza ICE
recupero
ICE ON
ICE OFF
A
differenza
dell’ibrido serie, la
configurazione
parallelo consente di
«sommare»
le
potenze erogate dal
motore endotermico
e da quello elettrico,
mantenendo
la
possibilità di poter
lavorare anche in allelectric ma anche
solo in endotermico.
ICE ON
Veicoli su strada: Ibridi
Prof. Giuseppe Tomasso - Università di Cassino
Hybrid:
parallelo
P
Potenza uscita
Ricarica batterie
Potenza ICE
recupero
Potenza elettrica
ICE ON
ICE OFF
Le
prestazioni
dinamiche possono
anche
essere
aumentate,
a
discapito
del
rendimento, andando
a modulare la potenza
del ICE e spostandolo,
quindi, dal punto di
massimo rendimento.
ICE ON
Veicoli su strada: Ibridi
Prof. Giuseppe Tomasso - Università di Cassino
11
27/11/2011
Hybrid:
Posttransmission
parallel
In questa configurazione, il
motore elettrico è posizionato
dopo il motoriduttore che,
quindi, è applicato solo al ICE.
E’ una struttura più semplice
da integrare nel sistemi
produttivi
di
veicoli
tradizionali.
Si usa anche come soluzione
per l’ibridizzazione dei veicoli
già esistenti (retrofit)
Veicoli su strada: Ibridi
Prof. Giuseppe Tomasso - Università di Cassino
Hybrid:
Pretransmission
parallel
In questa configurazione, il
motore elettrico è posizionato in
tandem con l’ICE e prima del
motoriduttore. Entrambe le
coppie, quindi, sono sommate
all’ingresso del motoriduttore.
Non essendoci una coppia
addizionale applicata all’uscita
del motoriduttore, l’efficienza di
trasmissione aumenta.
E’ una struttura più compatta,
utilizzata per veicoli che nascono
come ibridi.
La struttura di trasmissione alle
ruote rimane quella tradizionale.
Veicoli su strada: Ibridi
Prof. Giuseppe Tomasso - Università di Cassino
12
27/11/2011
Hybrid:
«Through the
road» parallel
La trasmissione della coppia viene fatta
attraverso due assi di rotazione diversi.
La somma delle coppie viene effettuata
direttamente «sulla strada».
Veicoli su strada: Ibridi
Prof. Giuseppe Tomasso - Università di Cassino
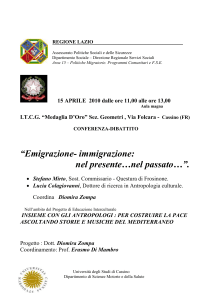
Parametri di un veicolo
Esempio di
dimensionamento
Parametri dinamici
• Accelerazione
• Pendenza
• Velocità
Parametro
Valore
Unità
Massa
1767
kg
Gravità
9.81
m/s2
Coeff. Attrito
0,015
Densità aria
1,225
Coeff. penetrazione aria
0.35
Area sezione frontale
1.93
m2
Inerzia ruota
3.2639
kg/m2
Raggio ruota
0,2794
m
Vento
0
m/s
kg/m3
da 0 a 100 km/h in 16 secondi
5° a 100km/h e massimo 25° a 60km/h
160km/h (solo ICE), 140km/h (solo elettrico)
Il dimensionamento è solitamente effettuato rispettando i vincoli dinamici con la minima
potenza
Ibridi: dimensionamento
Prof. Giuseppe Tomasso - Università di Cassino
13
27/11/2011
Forza di trazione
Regione a coppia costante
Esempio di
dimensionamento
Regione a potenza costante
Vr m
Velocità lineare
Vr v
Per il motore elettrico
•
•
•
Accelerazione
Pendenza
Velocità
da 0 a 100 km/h in 16 secondi
5° a 100km/h e massimo 25° a 60km/h
160km/h - (parallelo), 140km/h (serie)
Il dimensionamento è solitamente effettuato rispettando i vincoli dinamici con la minima
potenza
Ibridi: dimensionamento
Prof. Giuseppe Tomasso - Università di Cassino
Esempio di
dimensionamento
Step 1:
componente
stazionaria
Ricordando la relazione che esprime la forza di trazione, si ha:
d 2 vxt
2
FxT G d , pc
tan c vxt max T
D
D
Come primo step, si può valutare la componente della forza «stazionaria», e cioè quella in
grado di movimentare il veicolo alla massima velocità e sulla massima pendenza. Per la
massima pendenza:
d 2
FxT , _ max G d , pc
tan max c vxt , _ max
D D
2
G tan max
Pmotore,n, FxT _ max * vxt , _ max
Ibridi: dimensionamento
Prof. Giuseppe Tomasso - Università di Cassino
14
27/11/2011
Esempio di
dimensionamento
Step 1:
componente
stazionaria
Considerando il funzionamento in condizioni standard con pendenza quasi nulla o minima, la
potenza per sostenere il veicolo alla veocità massima è data da:
d 2
FxT ,v _ max G d , pc
tan min c vxt ,v _ max
D
D
d 2
G d , pc c vxt ,v _ max
D
D
2
2
Pmotore,n,v FxT ,v _ max * vxt ,v _ max
Ibridi: dimensionamento
Prof. Giuseppe Tomasso - Università di Cassino
Esempio di
dimensionamento
Step 2:
componente
dinamica
Per quanto riguarda la forza inerziale, si può considerare che:
FxT ,tot max FxT ,v _ max , FxT , _ max FxT ,a maxT
da cui:
axT
dv FxT ,a
dt
m
m
dv
dt
FxT ,a
Integrando, si ottiene
va
t
0
0
a
dv
m
dt
FxT ,a
va = 100km/h
ta= 16 secondi
Ibridi: dimensionamento
Prof. Giuseppe Tomasso - Università di Cassino
15
27/11/2011
Forza di trazione
Esempio di
dimensionamento
Regione a coppia (forza) costante
Step 2:
componente
dinamica
va
m
0
va
m
0
Regione a potenza costante
t
a
dv
dt
FxT ,a
0
vr m
vrm
ta
dv
PxT ,a / v
m
dt ta
0
0
dv
PxT ,a / v
v2 v2
m
vrm vrm 0 a rm ta
2
PxT ,a
2
Velocità lineare
vr v
va
m
vrm
dv
PxT ,a / v
PxT ,a
ta
m 2
vrm va2
2ta
Ibridi: dimensionamento
Prof. Giuseppe Tomasso - Università di Cassino
Esempio di
dimensionamento
Step 3: potenza
totale
Volendo considerare anche la componente stazionaria, si ha:
vrm
m
0
dv
d 2
2
PxT ,a / vrm G d , pc
tan c v
D
D
va
dv
ta
d 2
2
vrm P
/
v
G
tan
c
v
xT ,a
d , pc D D
m
PxT ,a potenza massima
Ibridi: dimensionamento
Prof. Giuseppe Tomasso - Università di Cassino
16
27/11/2011
Esempio di
dimensionamento
Step 3: potenza
totale
Ibrido serie: PxT,a sarà la potenza con cui si andrà a dimensionare il motore elettrico. Il
motore ICE sarà dimensionato per la potenza dell’elettrico, più l’aliquota degli ausiliari di
bordo (si arriva fino a 10kW endotermici con aria condizionata, luci, ecc…)
Ibrido parallelo: l’ICE ed il motore elettrico sono dimensionati per garantire singolarmente un
minimo di prestazioni del veicolo in termini di velocità massima. La pendenza massima e
l’accelerazione massima sono ottenuti, solitamente, mediante la somma delle due potenze.
Il rapporto fra la potenza elettrica e quella totale fornisce il «grado di ibridizzazione» del
veicolo. Solitamente, il grado di ibridizzazione va da un 30% fino al 70%.
Ibridi: dimensionamento
Prof. Giuseppe Tomasso - Università di Cassino
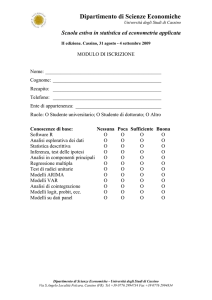
Trasmissione di
coppia e moto:
planetary gear
Prof. Giuseppe Tomasso - Università di Cassino
Ibridi: dinamica di
propulsione
17
27/11/2011
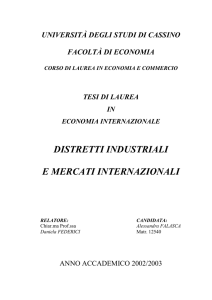
Trasmissione di
coppia e moto:
planetary gear
Ibridi: architetture avanzate e
dinamica del sistema di
propulsione
Prof. Giuseppe Tomasso - Università di Cassino
Nel punto P1 𝑣𝑃1 = 𝜔𝐴 𝑟𝐴
Trasmissione di
coppia e moto:
planetary gear
𝑣𝑃1 = 𝜔𝐶 𝑟𝐶 − 𝜔𝐵 𝑟𝐵
Nel punto P2 𝑣𝑃2 = 𝜔𝐷 𝑟𝐷
𝑣𝑃2 = 𝜔𝐶 𝑟𝐶 + 𝜔𝐵 𝑟𝐵
D
vP1
wD
wC
P1
A
wA
B
rB
𝜔𝐴 𝑟𝐴 = 𝜔𝐶 𝑟𝐶 − 𝜔𝐵 𝑟𝐵
P2
rC
C
vP2
𝜔𝐷 𝑟𝐷 = 𝜔𝐶 𝑟𝐶 + 𝜔𝐵 𝑟𝐵
𝑟𝐷 = 𝑟𝐴 + 2𝑟𝑐
𝑟𝐵 = 𝑟𝐴 + 𝑟𝑐
wB
rA
rD
Prof. Giuseppe Tomasso - Università di Cassino
𝜔𝐷 𝑟𝐷 = 𝜔𝐴 𝑟𝐴 + 2𝜔𝐵 𝑟𝐵
1
𝑟𝐵 = (𝑟𝐴 + 𝑟𝐷 )
2
𝜔𝐷 𝑟𝐷 = 𝜔𝐴 𝑟𝐴 + 𝜔𝐵 (𝑟𝐷 +𝑟𝐴 )
Ibridi: architetture avanzate e
dinamica del sistema di
propulsione
18
27/11/2011
Trasmissione di
coppia e moto:
planetary gear
D
vP1
wD
wC
P1
A
wA
B
rB
2𝜋
P2
rC
C
𝐷𝑖
= 2𝜋𝑟𝑖 = 𝑝𝑁𝑖
2
N numero denti
p passo
𝜔𝐷 𝑟𝐷 = 𝜔𝐴 𝑟𝐴 + 𝜔𝐵 (𝑟𝐷 +𝑟𝐴 )
vP2
wB
rA
𝜔𝐷 𝑁𝐷 = 𝜔𝐴 𝑁𝐴 + 𝜔𝐵 (𝑁𝐷 +𝑁𝐴 )
rD
Ibridi: architetture avanzate e
dinamica del sistema di
propulsione
Prof. Giuseppe Tomasso - Università di Cassino
Motore ICE satelliti
Esempi: Toyota
Prius e Ford
Escape
D
vP1
wD
wC
Motore elettrico corona + asse
ruote
Generatore elettrico solare
P1
A
wA
B
rB
P2
rC
C
vP2
wB
rA
rD
𝜔𝐷 𝑁𝐷 = 𝜔𝐴 𝑁𝐴 + 𝜔𝐵 (𝑁𝐷 +𝑁𝐴 )
Considerando i segni delle velocità:
𝜔𝑀𝐸 𝑁𝑀𝐸 = 𝜔𝐺 𝑁𝐺 + 𝜔𝐼𝐶𝐸 (𝑁𝑀𝐸 +𝑁𝐺 )
𝜔𝐼𝐶𝐸 = 𝜔𝐺
𝑁𝐺
𝑁𝑀𝐸
+ 𝜔𝑀𝐸
(𝑁𝑀𝐸 +𝑁𝐺 )
(𝑁𝑀𝐸 +𝑁𝐺 )
𝜔𝑀𝐸 𝑁𝑀𝐸 = 𝜔𝐴𝑆𝑆𝐸 𝑁𝐴𝑆𝑆𝐸
Prof. Giuseppe Tomasso - Università di Cassino
Ibridi: architetture avanzate e
dinamica del sistema di
propulsione
19
27/11/2011
D
vP1
wD
Esempi: Toyota
Prius e Ford
Escape
wC
P1
A
wA
B
rB
P2
rC
C
vP2
wB
rA
rD
Eq. di coppia
𝑇𝐼𝐶𝐸 𝜔𝐼𝐶𝐸 = 𝑇𝐺 𝜔𝐺 +𝑇𝐷 𝜔𝐷
𝜔𝐼𝐶𝐸 = 𝜔𝐺
𝑇𝐼𝐶𝐸 𝜔𝐺
𝑁𝐺
𝑁𝐷
+ 𝑇𝐼𝐶𝐸 𝜔𝐷
(𝑁𝐷 +𝑁𝐺 )
(𝑁𝑀𝐸 +𝑁𝐺 )
𝑇𝑔 = 𝑇𝐼𝐶𝐸 𝜔𝐺
𝑁𝐺
(𝑁𝐷 +𝑁𝐺 )
= 𝑇𝑔 𝜔𝑔 +𝑇𝐷 𝜔𝐷
𝑇𝐷 = 𝑇𝐼𝐶𝐸 𝜔𝐷
Prof. Giuseppe Tomasso - Università di Cassino
𝑁𝐺
𝑁𝐷
+ 𝜔𝐷
(𝑁𝐷 +𝑁𝐺 )
(𝑁𝑀𝐸 +𝑁𝐺 )
𝑁𝐷
(𝑁𝐷 +𝑁𝐺 )
Ibridi: architetture avanzate e
dinamica del sistema di
propulsione
Esempi: Lexus
Prof. Giuseppe Tomasso - Università di Cassino
Ibridi: architetture avanzate e
dinamica del sistema di
propulsione
20
27/11/2011
Esempi: GM
two mode
hybrid
transmission
Ibridi: architetture avanzate e
dinamica del sistema di
propulsione
Prof. Giuseppe Tomasso - Università di Cassino
D
vP1
wD
Esempi: Toyota
Prius e Ford
Escape
wC
P1
A
wA
B
rB
P2
rC
C
vP2
wB
rA
rD
Modo 1: solo ME
Tout TME * kr
Prof. Giuseppe Tomasso - Università di Cassino
Ibridi: architetture avanzate e
dinamica del sistema di
propulsione
21
27/11/2011
D
vP1
wD
Esempi: Toyota
Prius e Ford
Escape
wC
rB
B
A
vP2
C
P1
wA
P2
rC
wB
rA
rD
Modo 2: solo ICE + generazione
Tg TICE
NA
N A ND
TD TICE
ND
N A ND
Tout TICE
ND
kr
N A ND
Ibridi: architetture avanzate e
dinamica del sistema di
propulsione
Prof. Giuseppe Tomasso - Università di Cassino
D
vP1
wD
Esempi: Toyota
Prius e Ford
Escape
wC
P1
A
wA
B
rB
P2
rC
C
vP2
wB
rA
rD
Modo 3: ICE + ME + generazione
Tg TICE
NA
N A ND
TD TICE
ND
N A ND
ND
Tout TICE
T ME k r
N A ND
Prof. Giuseppe Tomasso - Università di Cassino
Ibridi: architetture avanzate e
dinamica del sistema di
propulsione
22
27/11/2011
D
vP1
wD
Esempi: Toyota
Prius e Ford
Escape
wC
P1
A
wA
B
rB
P2
rC
C
vP2
wB
rA
rD
Modo 4: ICE + ME
Tg 0
(si blocca la velocità del sole)
TD TICE
Tout TICE T ME k r
Prof. Giuseppe Tomasso - Università di Cassino
Ibridi: architetture avanzate e
dinamica del sistema di
propulsione
23