programma di
MECCANICA RAZIONALE
corso di laurea in
INGEGNERIA Civile+Aerospaziale
anno accademico
2008-09
Prof. Fabio Bagarello
1. Premesse matematiche
Richiami di Algebra vettoriale. Operatori lineari e algebra matriciale. Analisi vettoriale. Curve sghembe e
ascissa curvilinea. Tangente, piano osculatore, normale principale e binormale ad una curva sghemba. Raggio
di curvatura. Terna intrinseca e formule di Frenet. Definizione di vettore applicato e di sistema di vettori
applicati. Risultante di un sistema di vettori applicati. Momento polare di un vettore applicato. Momento
polare risultante di un sistema di vettori applicati. Legge di variazione del momento polare al variare del polo.
Riducibilit‘a ed equivalenza.
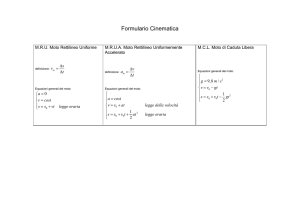
2. Cinematica del punto
Tempo e spazio. Punto materiale e sistema materiale. Equazioni scalari del moto di un punto. Traiettoria e
legge oraria del moto. Definizione di velocità ed accelerazione scalare. Definizione di velocità ed accelerazione
vettoriale (accelerazione tangenziale ed accelerazione centripeta). Moto circolare. Moto armonico. Definizione
di moto composto. Composizione di due moti armonici su assi ortogonali (figure di Lissajous).
3. Cinematica dei sistemi rigidi
Sistema materiale particellare e sistema materiale continuo. Moto di un sistema materiale. Definizione di moto
rigido e sistema rigido. Terna solidale ad un corpo rigido. Il vettore ω
~ e la formula fondamentale dei moti rigidi.
Proprietà caratteristiche dei moti rigidi. Significato fisico di ω
~ . Accelerazione di un punto di un sistema rigido
(definizione di accelerazione angolare e di asse di istantanea rotazione). Classificazione dei moti rigidi: moto
traslatorio, moto rotatorio e moto con un punto fisso. Teorema di Mozzi (cenni). Moto rigido piano. Definizione
di centro di istantanea rotazione. Curve polari. Puro rotolamento.
4. Moti relativi
Moto relativo di un punto. Definizione di moto di trascinamento e di velocità angolare di trascinamento.
Definizione di velocità e di accelerazione assoluta, relativa e di trascinamento. Principio di Galileo e teorema di
Coriolis. Moti rigidi relativi (composizione delle velocità angolari).
5. Dinamica e Statica del punto
Concetto di massa. Proprietà additiva delle massa. Massa dei sistemi continui (definizione di densità lineare,
superficiale e volumica). Definizione di sistema materiale e sua massa. Forza esplicata su un punto. Principio
di additività della forza. Forze a contatto e forze a distanza. Legge della forza. Invarianza della forza. Principi
della dinamica. Sistemi di riferimenti non inerziali. Forze apparenti. Dinamica terrestre e definizione di peso.
Problema fondamentale della dinamica del punto: problema diretto e problema inverso. Definizione di punto
vincolato, di vincolo e di reazione vincolare. Vincoli unilaterali e vincoli bilaterali. Definizione di attrito.
Leggi di Coulomb per l’attrito statico e dinamico. Equazione fondamentale della dinamica del punto vincolato.
Equazioni pure del moto. Pendolo semplice. Definizione di posizione di equilibrio per un punto libero. Equilibrio
del punto vincolato.
1
6. Baricentri e momenti di inerzia
Definizione di baricentro di un sistema particellare o continuo. Proprietà d’invarianza del baricentro. Proprietà
distributiva del baricentro. Proprietà di ubicazione del baricentro. Momento di inerzia assiale di un sistema
particellare o continuo. Proprietà additiva del momento di inerzia. Tensore di inerzia. Teorema di Huygens.
Ellissoide di inerzia. Assi e piani principali.
7. Quantità cinematiche
Definizione di quantità di moto, momento angolare, forza di inerzia, momento risultante delle forze di inerzia ed
energia cinetica di un sistema particellare o continuo. Proprietà additiva delle quantità cinematiche. Teorema di
König per l’energia cinetica e per il momento angolare (momento angolare orbitale e di spin). Energia cinetica
di un corpo rigido con un punto fisso e con un asse fisso. Momento angolare polare di un corpo rigido con un
punto fisso. Momento angolare assiale di un corpo rigido con un asse fisso.
8. Sistemi olonomi e lavoro
Grado di libertà di un sistema (sistema olonomo ad N parametri lagrangiani). Determinazione del grado di
libertà dei sistemi olonomi più comuni. Definizione di spostamento infinitesimo, elementare, possibile e virtuale.
Definizione di lavoro infinitesimo, possibile, virtuale ed elementare di una forza e di una sollecitazione concentrata
o distribuita. Definizione di potenza. Lavoro di una sollecitazione agente su un sistema rigido. Espressione
del lavoro virtuale di un sistema olonomo ad N gradi di libertà. Definizione di componente generalizzata o
lagrangiana della sollecitazione.
9. Forze conservative
Definizione di forza conservativa. Funzione potenziale ed energia potenziale. Espressione del potenziale della
forza peso, elastica, assifuga e gravitazionale.
10. Dinamica dei sistemi
Definizione di forze esterne e forze interne. Nullità del risultante e del momento risultante delle forze interne.
Equazioni cardinali della Dinamica dei sistemi. Teorema della quantità di moto e teorema del moto del baricentro. Teorema del momento delle quantità di moto. Teorema dell’energia cinetica (forze giroscopiche).
11. Vincoli perfetti
Definizione di vincolo perfetto. Esempi: vincolo di puro rotolamento, vincolo di rigidità, curva e superficie senza
attrito, corpo rigido con un punto fisso e con asse fisso senza attrito. Nullità del lavoro virtuale delle reazioni
vincolari nel caso di vincoli bilaterali e natura girocopica delle forze vincolari nel caso di vincoli fissi e perfetti.
Integrale dell’energia.
12. Stereodinamica
Le equazioni fondamentali della Dinamica nel caso del corpo rigido: determinazione delle equazioni pure e delle
reazioni vincolari. Moto di un corpo rigido con un punto fisso (equazioni di Eulero). Moto di un corpo rigido
con un asse fisso.
13. Statica dei sistemi
Spostamenti infinitesimi: elementari e virtuali. Definizione di posizione di equilibrio per un sistema libero o
vincolato. Equazioni cardinali della statica dei sistemi. Principio dei lavori virtuali. Principio di stazionarietà
del potenziale. Condizione di equilibrio di un sistema olonomo ad N gradi di libertà e a vincoli bilaterali.
14. Stereostatica
Sufficienza delle equazioni cardinali della statica nel caso dei sistemi rigidi. Determinazione delle equazioni pure
e delle reazioni vincolari nel caso di un corpo rigido con un asse fisso, con un asse scorrevole e con un punto fisso.
Problema staticamente determinato e indeterminato. Operazioni elementari e di trasporto. Sistemi equivalenti
e sistemi riducibili. Equilibrio del solido appoggiato.
2
15. Elementi di meccanica analitica
Equazioni di Lagrange per i sistemi olonomi ad N gradi di libertà. Caso delle forze attive conservative (funzione
lagrangiana). Cenni sulla posizione di equilibrio stabile e instabile. Quantita’ conservate.
20. Piccole Oscillazioni
Sistemi ad un grado di libertà. Ove possibile: Sistemi ad N gradi di libertà.
Testi consigliati
F. Bagarello, Note di Meccanica Razionale, Dario Flaccovio Editore, 2003
T. Brugarino, S. Giambò, A. Greco, P. Pantano, S. Rionero; VETTORI E TENSORI , Editel, Cosenza.
T. Brugarino, S. Giambò, P. Pantano; MECCANICA RAZIONALE (Cinematica e Dinamica), Editel,
Cosenza.
T. Brugarino, S. Giambò, P. Pantano; MECCANICA RAZIONALE (Dinamica dei sistemi e Statica), Editel,
Cosenza.
T. Brugarino, S. Giambò, P. Pantano; REGOLE EURISTICHE E RISOLUZIONE DI PROBLEMI DI
MECCANICA CLASSICA, Editel, Cosenza.
G. Grioli; LEZIONE DI MECCANICA RAZIONALE, Cortina, Padova.
3