a.a. 2014/2015
Docente: Stefano Bifaretti
email: [email protected]
• Un sistema di controllo automatico è un sistema in grado di imporre a una o più variabili controllate (uscite) gli andamenti temporali desiderati in base a una opportuna legge applicata tramite l’ingresso senza l’intervento umano.
• le variabili controllate riguardano un processo fisico: posizione, velocità, tensione, corrente, temperatura….
Corso di Elettronica di Potenza ed Elettronica Industriale (9 CFU) – Sistemi di Controllo
2/22
Problema: definire il comando in modo tale da ottenere l’andamento desiderato della variabile da controllare
I soluzione – Anello aperto
Ricavare l’andamento del comando sulla base del modello dell’impianto (attuatore e
processo)
Nel caso di valore desiderato costante il metodo può garantire risultati soddisfacenti
mentre quando si desidera un andamento variabile nel tempo è normalmente difficile
ricavare l’andamento del comando.
Corso di Elettronica di Potenza ed Elettronica Industriale (9 CFU) – Sistemi di Controllo
3/22
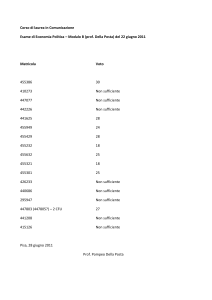
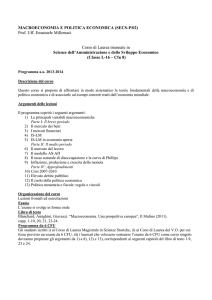
Esempio: azionamento di velocità in c.c.
Selettore velocità
Riferimento
Generatore
comando
comando
Convertitore
c.c.-c.c.
Va
Motore dc
Il motore dc fornisce una velocità di rotazione k·Va proporzionale alla tensione applicata. Il
riferimento di velocità è generato attraverso un segnale elettrico in tensione, ottenuto mediante
un potenziometro, proporzionale alla velocità desiderata.
Il segnale di riferimento è utilizzato per generare il comando di un convertitore c.c.‐c.c. che
alimenta il motore.
Un controllo ad anello aperto (open loop) risente dell’intervento di disturbi esterni (ad esempio la
pressione della mano sul disco) che, variando la coppia resistente, potrebbero ridurre la velocità
del disco rendendo l’azione di controllo inefficiente.
Tale tipo di controllo risente anche di variazioni parametriche della catena di comando.
Corso di Elettronica di Potenza ed Elettronica Industriale (9 CFU) – Sistemi di Controllo
4/22
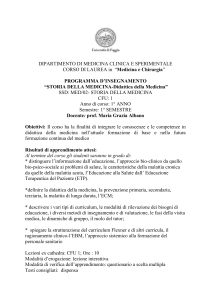
II soluzione – Anello chiuso o controreazione
Effettuare il confronto tra valore desiderato e valore della variabile da controllare (errore) e ricavare l’andamento del comando sulla base di tale errore.
Il segnale di comando è fornito dal regolatore. Con questa soluzione è possibile anche inseguire un andamento desiderato variabile nel tempo e sopperire alle variazioni parametriche e ai disturbi.
Corso di Elettronica di Potenza ed Elettronica Industriale (9 CFU) – Sistemi di Controllo
5/22
controllo in controreazione
•
Per controreazione si intende il processo mediante il quale l’ingresso di un sistema viene alterato dalla sua uscita
•
Tale sistema calcola l’azione di controllo a partire dalla differenza fra uscita desiderata e uscita effettiva
•
Questa differenza viene detta segnale errore : il compito del controllore è proprio quello di far tendere a zero il segnale errore
Benefici
•
•
•
inseguimento più veloce e preciso del valore desiderato rispetto ai sistemi open‐
loop;
elevata robustezza, ovvero l’uscita viene mantenuta vicina al valore desiderato anche sotto l’influenza di disturbi esterni (reiezione dei disturbi) e/o in presenza di variazioni parametriche (bassa sensibilità) riduzione della non linearità
Corso di Elettronica di Potenza ed Elettronica Industriale (9 CFU) – Sistemi di Controllo
6/22
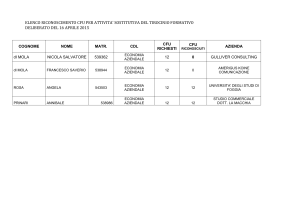
Esempio: azionamento di velocità
La legge di controllo è implementata nel Regolatore, dal quale dipendono le
prestazioni statiche e dinamiche del sistema a controreazione.
Al fine di definire la legge di controllo è necessario determinare il modello
matematico dell’impianto costituito da attuatore e processo.
Normalmente i sistemi sono non‐lineari ma, sotto opportune ipotesi, è possibile
considerare un comportamento lineare in un determinato intervallo operativo.
Corso di Elettronica di Potenza ed Elettronica Industriale (9 CFU) – Sistemi di Controllo
7/22
Sistemi Lineari
Il modello dinamico di un sistema lineare è descritto da un’equazione differenziale
lineare a coefficienti costanti.
Il metodo della Trasformata di Laplace permette di rappresentare equazioni
differenziali in equazioni algebriche e, pertanto, consente di ottenere un modello
funzionale, nella variabile di Laplace s, che descrive il comportamento dinamico un
sistema. Tale rappresentazione è detta funzione di trasferimento (fdt).
La fdt è sempre un rapporto tra due funzioni polinomiali nella variabile s
⋯
⋯
∏
∏
k è il guadagno, zi sono gli zeri, pi sono i poli della F(s)
Corso di Elettronica di Potenza ed Elettronica Industriale (9 CFU) – Sistemi di Controllo
8/22
Sistemi Lineari
La risposta di un sistema Y(s) a un determinato ingresso U(s) si ricava da:
Il comportamento in transitorio di un sistema è generalmente caratterizzato dalla
risposta impulsiva ( U(s)=1 ) e dalla risposta al gradino ( U(s)=1/s ).
≡
1
Trasformata della risposta all’impulso Trasformata della risposta al gradino Per ottenere l’andamento nel tempo y(t) occorre impiegare l’antitrasformata di Laplace:
L
Corso di Elettronica di Potenza ed Elettronica Industriale (9 CFU) – Sistemi di Controllo
9/22
Sistemi Lineari
Conoscendo i poli della F(s) è possibile scrivere, tramite il teorema dei residui, la
Y(s) in fratti semplici. Nel caso di poli con molteplicità unitaria:
1
2
Pertanto la y(t) si ricava dalla combinazione lineare dei seguenti termini:
L
L
L
1
2
sin
Corso di Elettronica di Potenza ed Elettronica Industriale (9 CFU) – Sistemi di Controllo
10/22
Sistemi Lineari
Definizione stabilità
Un sistema lineare e stazionario si dice stabile se in corrispondenza a un ingresso limitato in ampiezza e durata la sua risposta rimane limitata (Bounded Input Bounded
output, BIBO).
Un sistema caratterizzato da poli reali negativi e/o a parte reale negativa è
asintoticamente stabile poiché ciascuno dei contributi alla risposta impulsiva y(t)
tende a zero. In presenza di un polo nell’origine la risposta impulsiva tende a un valore
costante, pertanto il sistema è stabile.
In sintesi:
Se lim
→
0 allora il sistema è stabile
Se lim
0 allora il sistema è asintoticamente stabile
Se lim
∞ allora il sistema è instabile
→
→
La stabilità è una proprietà intrinseca del sistema e, pertanto, è indipendente dalle condizioni iniziali e dall’ingresso applicato.
Corso di Elettronica di Potenza ed Elettronica Industriale (9 CFU) – Sistemi di Controllo
11/22
SCHEMI A BLOCCHI
Per schematizzare un modello matematico di un sistema si usa una
rappresentazione a blocchi allo scopo di evidenziare in maniera semplice il flusso di
informazioni
• Caratteristiche di blocco ideale:
•
•
Unidirezionale (il segnale si propaga in un solo verso)
Non costituisce carico per il segnale (il segnale su una linea non cambia se collegato a uno o piu’ blocchi)
Corso di Elettronica di Potenza ed Elettronica Industriale (9 CFU) – Sistemi di Controllo
12/22
SCHEMI A BLOCCHI
•
Nodo sommatore
Y
I1
Y=I1 I2
+
I2
•
Punto di diramazione
I
I
I
Corso di Elettronica di Potenza ed Elettronica Industriale (9 CFU) – Sistemi di Controllo
13/22
SCHEMI A BLOCCHI
• Blocchi in cascata
U
Y
G1
G2
equivale a
U
Y
G=G1*G2
Y = G* U dove G= G1*G2
Corso di Elettronica di Potenza ed Elettronica Industriale (9 CFU) – Sistemi di Controllo
14/22
SCHEMI A BLOCCHI
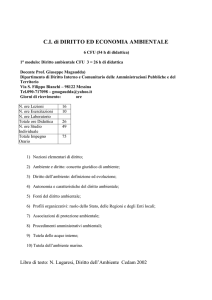
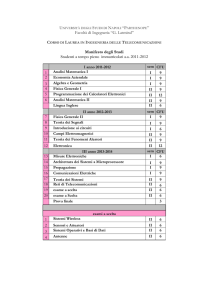
Blocchi in retroazione
W(s) è la fdt a ciclo chiuso
•
•
•
F = HY ; E = U – F ; Y = GE
Y = GU – GF = GU – GHY
Y + GHY=GU
SCHEMI A BLOCCHI
I sistemi in controreazione hanno una ridotta influenza rispetto ai disturbi esterni e una scarsa sensibilità alle variazioni parametriche.
Supponiamo G e H costanti
Se, come normalmente avviene, GH>>1 ovvero la risposta del sistema dipende solo da H
Esempio: amplificatore lineare a guadagno costante G=10000, controreazione istantanea H=0.1
Se G variasse del 10% (G=9000)
Corso di Elettronica di Potenza ed Elettronica Industriale (9 CFU) – Sistemi di Controllo
16/22
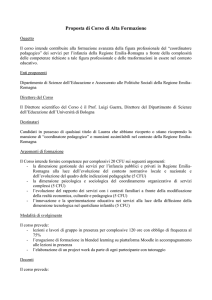
Risposta armonica o risposta in frequenza
Asin
F s
L
A
sin
e
sono, rispettivamente, la risposta armonica in ampiezza
e fase del sistema. Esse descrivono il comportamento del sistema in
corrispondenza a ingressi sinusoidali per vari valori di pulsazione
La risposta armonica viene usualmente rappresentata con i diagrammi di Bode.
Corso di Elettronica di Potenza ed Elettronica Industriale (9 CFU) – Sistemi di Controllo
17/22
Risposta armonica o risposta in frequenza
Regolatori PID
•
•
•
•
•
•
•
•
Vantaggi:
buona efficacia nel controllo di molti processi industriali, in
relazione a specifiche di prestazione poco stringenti
possibile realizzazione con diverse tecnologie (mec., idr., elet.)
semplicità di utilizzo (taratura di 2‐3 parametri)
non necessita approfondite conoscenze del processo
adeguato alle generalmente mediocri prestazioni dei componenti
presenti nel loop di controllo
Corso di Elettronica di Potenza ed Elettronica Industriale (9 CFU) – Sistemi di Controllo
19/22
Regolatori PID
•
•
•
•
•
Azione proporzionale
Componente più sensibile al valore attuale dell’errore
Un valore elevato di Kp comporta una reazione significativa anche per variazioni modeste del valore dell’errore
Un valore basso di Kp trasferirà sulle variabili di controllo variazioni contenute anche in presenza di errori rilevanti
Aumenta la banda passante (sistema più pronto)
Aumenta la precisione a regime per sistemi che non presentano poli nell’origine (di tipo 0)
Corso di Elettronica di Potenza ed Elettronica Industriale (9 CFU) – Sistemi di Controllo
20/22
Regolatori PID
•
•
•
•
•
Azione integrale
Tiene conto della storia dell’andamento avuto dall’errore in passato
Introduce un polo nell’origine
L’errore a regime per ingresso a gradino diventa nullo se il sistema (plant) non presenta poli nell’origine
Aumenta il ritardo della catena diretta di controllo e determina una riduzione dei margini di fase ed ampiezza del sistema retroazionato
Se il sistema presenta poli nell’origine l’azione integrale non deve essere utilizzata
Corso di Elettronica di Potenza ed Elettronica Industriale (9 CFU) – Sistemi di Controllo
21/22
Regolatori PID
•
•
•
•
•
•
Azione derivatrice
Varia linearmente con la derivata dell’errore
Azione anticipatrice, migliora i margini di stabilità
Amplifica i segnali con contenuto armonico a frequenze elevate (può amplificare il rumore)
Realizzazione fisica diversa dalla realizzazione teorica (zero nell’origine): Kds 1+s Kd/N
Una variazione a gradino del riferimento genera una componente impulsiva sulla componente derivata.
Si può filtrare il set‐point o derivare solamente la variabile di processo al posto dell’errore
Corso di Elettronica di Potenza ed Elettronica Industriale (9 CFU) – Sistemi di Controllo
22/22