Funzioni Complesse di variabile complessa
Docente:Alessandra Cutrı̀
A. Cutrı̀
17-11-2014
Metodi Matematici per l’ingegneria–Ing. Gestionale
Richiami sui numeri complessi
Indichiamo con C il campo dei Numeri complessi
√
z = x + iy ∈ C, ses x, y ∈ R i := −1 (Rappresentazione
cartesiana dei numeri complessi)
C ∼ R2 : z = x + iy ∈ C ↔ (x, y ) ∈ R2
x = Re(z), y = Im(z)
C NON è ORDINATO
Il complesso coniugato di z = x + iy è z = x − iy
p
p
√
Il modulo |z| = (Rez)2 + (Imz)2 = x 2 + y 2 = zz
Rappresentazione polare del numero complesso
z = ρ(cos θ + i sin θ) con ρ = |z| e per z 6= 0 θ = Argz + 2kπ
con k ∈ Z. Argz ∈ (−π, π) denota l’Argomento principale di z
A. Cutrı̀
17-11-2014
Metodi Matematici per l’ingegneria–Ing. Gestionale
Dati due numeri complessi z0 = x0 + iy0 e z1 = x1 + iy1
Somma: z0 + z1 = (x0 + x1 ) + i(y0 + y1 )
prodotto w = z0 · z1 = (x0 x1 − y0 y1 ) + i(x0 y1 + y0 x1 )
w = ρ0 ρ1 (cos(θ0 + θ1 ) + i sin(θ0 + θ1 ))
quindi |w | = ρ0 ρ1 = |z0 | · |z1 | ed un argomento di w ,
arg (w ) = Argz0 + Argz1 (non è detto che
Argz0 + Argz1 ∈ (−π, π) e dunque che sia l’argomento
principale di w )
se z 6= 0, il reciproco di z si definisce come
1
z
:=
z
|z|2
=
x−iy
x 2 +y 2
se z1 6= 0, quoziente
z0
xo x1 + y0 y1
xo y1 + y0 x1
z0 z1
−i
=
=
2
2
2
z1
|z1 |
x1 + y1
x12 + y12
A. Cutrı̀
17-11-2014
Metodi Matematici per l’ingegneria–Ing. Gestionale
Potenze intere di un numero complesso: Dato
z = x + iy = ρ(cos θ + i sin θ) e n ∈ N si definisce
w = z n = (x + iy )n = ρn (cos(nθ) + i sin(nθ))
Quindi |z n | = |z|n e arg (z n ) = n · arg (z)
Radice n−ma di un numero complesso:
dato z 6= 0, trovare w ∈ C tale che w n = z (n ∈ N). Tale w si
definisce radice n−ma di z
Ogni numero complesso z 6= 0 z = x + iy = ρ(cos θ + i sin θ)
ammette n radici n−me distinte in C date da:
wk = r (cos(φk ) + i sin(φk ))
dove r = (ρ) , φk = ( nθ + k 2π
n ) k = 0, 1, . . . , n − 1
1
n
Se θ = Argz la radice corrispondente a k = 0 si chiama radice
principale di z
A. Cutrı̀
17-11-2014
Metodi Matematici per l’ingegneria–Ing. Gestionale
Funzioni complesse di una variabile complessa
Sia A ⊆ C un aperto connesso di C ∼ R2 .
f :A⊆C→C
Essendo f (z) ∈ C per ogni z ∈ A ⇒ f (z) = u + iv con
u, v ∈ R quindi
f (z) = f (x + iy ) = u(x, y ) + iv (x, y )
u, v : A ⊆ R2 → R
u(x, y ) = Re(f (z)) e v (x, y ) = Im(f (z))
(z, f (z)) ∈ C × C ∼ R4
A. Cutrı̀
17-11-2014
Metodi Matematici per l’ingegneria–Ing. Gestionale
Esempi di Funzioni complesse di una variabile complessa
Funzioni lineari: f (z) = az + b per ogni z ∈ C con a, b ∈ C
1
b = 0. f (z) = az con |a| = 1. Si ha a = e iβ con β ∈ (−π, π)
|f (z)| = |z| ; arg (f (z)) = arg (a) + arg (z) = β + arg (z)
2
dunque l’effetto di f corrisponde ad una rotazione di ogni
punto z del piano complesso di un angolo β
b = 0. f (z) = az con |a| =
6 1. Si ha a = |a|e iβ con
β ∈ (−π, π)
|f (z)| = |a||z| ; arg (f (z)) = arg (a) + arg (z) = β + arg (z)
3
l’effetto di f corrisponde ad una omotetia: contrazione (se
|a| < 1) o dilatazione (se |a| > 1) di ogni punto z del piano più
una rotazione di ogni punto z di un angolo β (l’ordine delle
due operazioni non cambia il risultato)
b 6= 0 si aggiunge una traslazione di b (vettore di componenti
(Reb, Imb)). Conta l’ordine con cui vengono effettuate le
operazioni (rotazione+omotetia) e (traslazione):
z → az → az + b
z → z + b → a(z + b) = az + ab 6= az + b
A. Cutrı̀
17-11-2014
Metodi Matematici per l’ingegneria–Ing. Gestionale
Input :=
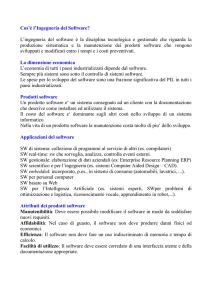
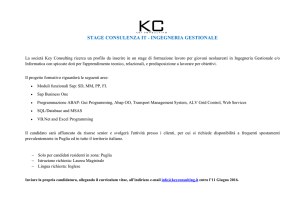
Funzioni quadratiche
ComplexMapPlot[z^2, z, VerticalLines[{{0,1},{-1,1}},
PlotPoints->7], PlotRange->All];
f (z) = z 2 per ogni z = x + iy ∈ C
f (z) = (x + iy )2 = x 2 − y 2 + i2xy
Quindi u(x, y ) = x 2 − y 2 e v (x, y ) = 2xy
Vediamo una rappresentazione dell’immagine di un reticolato del
piano tramite
lafamiglie
funzione
f (z) = z 2 :
L'unione delle tre
di segmenti precedenti:
Input :=
ComplexMapPlot[z^2, z, RectangularGrid[{{0,1},{-1,1}},
PlotPoints->7], PlotRange->All];
http://people.ciram.unibo.it/ barozzi/MatheCompl/MatheCompl.html
2 of 16
A. Cutrı̀
17-11-2014
Metodi Matematici per l’ingegneria–Ing.
Gestionale
15-11-2013 15:21
Radice quadrata
Osserviamo che la funzione f (z) = z 2 non è iniettiva: i punti
(x0 , y0 ) e (x0 , −y0 ) hanno la stessa immagine tramite f in quanto
u = x 2 − y02 , v = 2xy0 → x =
v2
v
⇒ u = 2 − y02
2y0
4y0
(nel piano (u, v ) si ha la stessa immagine).
Restringendo f|A dove A = {x + iy : x > 0} = {z : Rez > 0}
diventa iniettiva e la sua immagine (che coinciderà con il
dominio della funzione inversa è
dom(f −1 ) = C \ {x ∈ R : x ≤ 0}
Dato w = ρe iθ 6= 0 troviamo in generale due valori di z tali
che z 2 = w che sono
√ θ
z1 = ρe i 2 Radice principale di w (inversa di f|A )
z2 =
A. Cutrı̀
17-11-2014
√
θ
ρe i( 2 +π)
Metodi Matematici per l’ingegneria–Ing. Gestionale
file:///Users/ikbook/Documents/alessandraimac/didattica/mmigest...
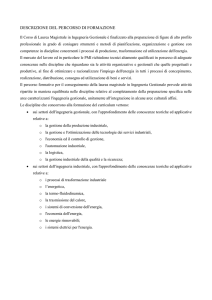
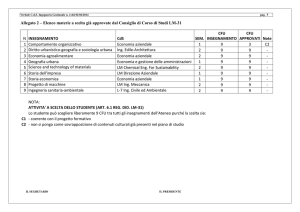
La funzione radice quadrata principale
Tutti i punti del piano complesso hanno immagini con parte reale non negativa.
Input :=
ComplexMapPlot[Sqrt[z], z,
RectangularGrid[{{-2,2},{-2,2}}],
Ticks -> {{-2., -1., 1., 2.}, Automatic}];
Input :=
ComplexMapPlot[Sqrt[z], z,
{Thickness[0.001], PolarGrid[{0,0},{0,2}]},
Ticks -> {{0.5, 1., 1.5}, Automatic}];
http://people.ciram.unibo.it/
barozzi/MatheCompl/MatheCompl.html
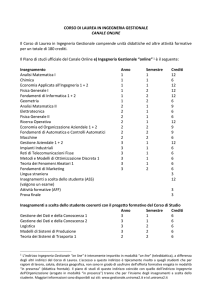
La funzione z -> 1/z
Le circonferenze hanno come immagini circonferenze (le rette sono casi limite di circonferenze).
Input :=
ComplexMapPlot[1/z, z, HorizontalLines[{{-2,2},{-2,2}}],
PlotRange->{{-2.5,2.5},{-2.5,2.5}}];
A. Cutrı̀
17-11-2014
Metodi Matematici per l’ingegneria–Ing. Gestionale
Esponenziale complesso
Vogliamo definire una funzione che estende al campo complesso la
definizione x ∈ R → e x . Ricordiamo che
x
x ∈R
lim (1 + )n = e x
n→∞
n
Se consideriamo ora z = x + iy e facciamo
x + iy n
) = e x (cos y + i sin y )
lim (1 +
n→∞
n
n
(con calcolo laborioso si vede che il modulo |(1 + x+iy
n )| tende a
e x e l’argomento tende a y ) Questo ci suggerisce di definire e z :
e z = e x+iy := e x (cos y + i sin y )
Si ha ovviamente u(x, y ) = e x cos y , v (x, y ) = e x sin y
|e z | = e x = e Rez > 0
∀z ∈ C ⇒ |e iy | = 1 ∀y ∈ R
e z1 +z2 = e z1 e z2
e z = e z+2kπi
∀k ∈ Z
Quindi e z è 2πi−periodica
A. Cutrı̀
17-11-2014
Metodi Matematici per l’ingegneria–Ing. Gestionale
Logaritmo complesso
e z 2πi−periodica ⇒ e z non è iniettiva
dato w ∈ C \ {0} (immagine di e z ), l’equazione e z = w ha in
realtà infinite soluzioni z = x + iy . Come si trovano?
w ∈ C \ {0} ⇒ w = ρ(cosθ + i sin θ) = ρe iθ
si devono determinare x, y in modo che e z = w ⇔ e x+iy = ρe iθ
Quindi:
ex = ρ
e iθ = e iy ⇒ x = log ρ , y = θ + 2kπ , k ∈ Z
Otteniamo
z = logC w = log ρ + i(θ + 2kπ)
k ∈Z
Esistono pertanto infiniti logaritmi complessi di w e
Re(logC w ) = log |w |
A. Cutrı̀
Im(logC w ) = arg (w ) + 2kπ
17-11-2014
k∈Z
Metodi Matematici per l’ingegneria–Ing. Gestionale
Logaritmo principale complesso
Se però restringiamo il dominio di e z all’insieme
A = {x + iy : x ∈ R, y ∈ (−π, π)}
e z z ∈ A è iniettiva e la sua immagine è C \ {x ≤ 0} allora se
consideriamo l’inversa della restrizione di e z all’insieme A
otteniamo una funzione ad un solo valore definita su C \ {x ≤ 0}
che prende il nome di Logaritmo principale
Log (z) = log(|z|) + iArg (z)
z ∈ C \ {x ≤ 0}
(Arg (z) è l’Argomento principale di z)
A. Cutrı̀
17-11-2014
Metodi Matematici per l’ingegneria–Ing. Gestionale
Limiti di Funzioni complesse di una variabile complessa
Sia z0 = x0 + iy0 ∈ A ⊆ C (A è un insieme aperto)
lim(x,y )→(x0 .y0 ) u(x, y ) = Re(l)
lim f (z) = l ∈ C ⇔
z→z0
lim(x,y )→(x0 .y0 ) v (x, y ) = Im(l)
f è continua in z0 se e solo se l = f (z0 )
Quindi per lo studio ci si riporta al caso di limiti di funzioni da R2
a R (le funzioni u e v )
A. Cutrı̀
17-11-2014
Metodi Matematici per l’ingegneria–Ing. Gestionale
Derivabilità in senso complesso
Sia A ⊆ C un aperto di C. f : A ⊆ C → C, z0 ∈ A. f è derivabile
in z0 se esiste finito il
lim
z→z0
f (z) − f (z0 )
=: f 0 (z0 )
z − z0
Poiché A è aperto, se z0 ∈ A, esiste un intorno Br (z0 )
(cerchio di centro z0 e raggio r ) contenuto in A e dunque per
z ∈ Br (z0 ) si può considerare il rapporto incrementale
f (z) − f (z0 ) ∈ C e z − z0 ∈ C dunque il rapporto
incrementale si definisce come il quoziente di due numeri
complessi (non avrebbe senso dividere due vettori!!!)
le regole di derivazione di somma, prodotto,quoziente,funzioni
composte,inverse sono analoghe a quelle di funzioni reali di
variabile reale
A. Cutrı̀
17-11-2014
Metodi Matematici per l’ingegneria–Ing. Gestionale
Condizioni CR
Anche se formalmente la definizione di derivabilità in z0 è molto
simile al concetto di derivabilità per funzioni reali di variabile reale,
vedremo che i due concetti sono profondamente diversi e la
condizione di derivabilità complessa è estremamente forte.
Che relazione c’è tra la derivabilità di f in z0 = x0 + iy0 e la
differenziabilità di u(x, y ) = Re(f ) e v (x, y ) = Im(f ) in
(x0 , y0 )? Non sono nozioni equivalenti ma vale il seguente
teorema:
Theorem
Condizioni di Cauchy-Riemann (CR): Sia f : A ⊆ C → C, A
aperto, z0 = x0 + iy0 ∈ A. Allora f è derivabile in z0 se e solo se
u(x, y ) = Ref (x + iy ) e v (x, y ) = Im(f (x + iy )) sono differenziabili
in (x0 , y0 ) e valgono le condizioni di Cauchy-Riemann seguenti:
ux (x0 , y0 ) = vy (x0 , y0 )
uy (x0 , y0 ) = −vx (x0 , y0 )
A. Cutrı̀
17-11-2014
Metodi Matematici per l’ingegneria–Ing. Gestionale
Dimostrazione del teorema CR
Dobbiamo provare che f è derivabile in z0 se e solo se u(x, y ) e
v (x, y ) sono differenziabili in (x0 , y0 ) e valgono le condizioni di
Cauchy-Riemann:
ux (x0 , y0 ) = vy (x0 , y0 )
uy (x0 , y0 ) = −vx (x0 , y0 )
DIM 00 ⇒00 : f derivabile in z0 equivale a
f (z) = f (z0 ) + f 0 (z0 )(z − z0 ) + o(|z − z0 |) z → z0
p
cioè, essendo |z − z0 | = (x − x0 )2 + (y − y0 )2 , indicando
f 0 (z0 ) = A + iB
u(x, y )+iv (x, y ) = u(x0 , y0 )+iv (x0 , y0 )+(A+iB)(x−x0 +i(y −y0 ))+o(|z−
da cui (isolando parte reale e parte immaginaria):
q
u(x, y ) = u(x0 , y0 )+A(x−x0 )−B(y −y0 )+o( (x − x0 )2 + (y − y0 )2 )
q
v (x, y ) = v (x0 , y0 )+B(x−x0 )+A(y −y0 )+o( (x − x0 )2 + (y − y0 )2 )
A. Cutrı̀
17-11-2014
Metodi Matematici per l’ingegneria–Ing. Gestionale
Quindi u e v sono differenziabili in (x0 , y0 ) e
∇u(x0 , y0 ) = (A, −B)
∇v (x0 , y0 ) = (B, A)
da cui segue
ux (x0 , y0 ) = vy (x0 , y0 )
uy (x0 , y0 ) = −vx (x0 , y0 )
ed inoltre
f 0 (z0 ) = ux + ivx = vy − iuy = . . .
DIM 00 ⇐00 :
u(x, y ) = u(x0 , y0 )+ux (x0 , y0 )(x−x0 )+uy (x0 , y0 )(y −y0 )+o(|z−z0 |)
iv (x, y ) = i[v (x0 , y0 )+vx (x0 , y0 )(x−x0 )+vy (x0 , y0 )(y −y0 )+o(|z−z0 |)]
sommando:
f (z) = f (z0 ) + [ux + ivx ](x − x0 ) + [uy + ivy ](y − y0 ) + o(|z − z0 |)
ma, per le condizioni CR, ux + ivx = −iuy + vy dunque, ponendo
f 0 (z0 ) := ux (x0 , y0 ) + ivx (x0 , y0 ) si ha
f (z) = f (z0 ) + f 0 (z0 )(z − z0 ) + o(|z − z0 |)
A. Cutrı̀
17-11-2014
Metodi Matematici per l’ingegneria–Ing. Gestionale
esempi
f (z) = e z è derivabile in ogni punto z ∈ C e f 0 (z) = e z
Infatti,
u(x, y ) = e x cos y , v (x, y ) = e x sin y
sono differenziabili in ogni (x, y )
ed inoltre valgono le condizioni CR:
ux = e x cos y = vy
uy = −e x sin y = −vx
inoltre f 0 (z) = ux + ivx = e x (cos y + i sin y ) = e z
f (z) = z NON è derivabile in alcun punto z ∈ C (è continua
in ogni punto)
Infatti:
u(x, y ) = x , v (x, y ) = −y
A. Cutrı̀
17-11-2014
dunque ux = 1 e vy = −1
Metodi Matematici per l’ingegneria–Ing. Gestionale
f (z) = |z|2 è derivabile SOLTANTO nel punto z = 0 (è
continua in ogni punto)
Infatti: u(x, y ) = x 2 + y 2 e v (x, y ) = 0 dunque vx = vy = 0
mentre ux = 2x e uy = 2y pertanto l’unico punto dove sono
soddisfatte le CR è (0, 0) e f 0 (0) = 0
f (z) = |z| NON è derivabile in alcun punto (è continua in
ogni punto)
Infatti:
v (x, y ) = 0 dunque vx = vy = 0
p
mentre u(x, y ) = x 2 + y 2 NON è differenziabile in (0, 0) ed al di
fuori dell’origine è differenziabile e ux = √ 2x 2 e uy = √ 2y 2
x +y
x +y
pertanto al di fuori di (0, 0) le condizioni CR non sono soddisfatte.
A. Cutrı̀
17-11-2014
Metodi Matematici per l’ingegneria–Ing. Gestionale
Se f (x + iy ) = u(x, y ) + iv (x, y ) è a valori reali (i.e.
v (x, y ) ≡ 0 in A) oppure a valori immaginari puri (i.e.
u(x, y ) ≡ 0 in A). Allora f è derivabile in A (connesso) se e
solo se è Costante in A (perché ∇u ≡ 0 implica per le
condizioni CR che ∇v ≡ 0 e viceversa in A)
Se f è derivabile in un punto z0 = (x0 .y0 ):
CR ⇒ < ∇u(x0 .y0 ), ∇v (x0 .y0 ) >= 0 , k∇u(x0 .y0 )k = k∇v (x0 .y0 )k
ed essendo
∇u(x0 .y0 ) ⊥ {u(x, y ) = u(x0 .y0 )} , ∇v (x0 .y0 ) ⊥ {v (x, y ) = v (x0 .y0 )
le linee di livello u(x, y ) = u(x0 .y0 ) e v (x, y ) = v (x0 .y0 ) sono
tra loro ortogonali
A. Cutrı̀
17-11-2014
Metodi Matematici per l’ingegneria–Ing. Gestionale
Funzioni Olomorfe
Def: f : A ⊆ C → C A aperto, si dice Olomorfa in A se è derivabile
in ogni punto di A con derivata continua. Se A = C allora f
olomorfa si dice Intera. Si dice che f è Olomorfa in z0 ∈ A se f è
olomorfa in un intorno Br (z0 ) ⊆ A.
Le funzioni Olomorfe in A si indicano con H(A)
Se f ∈ H(A) con A ⊆ C Aperto, allora le condizioni CR
implicano che le due forme differenziali:
ω1 := u(x, y )dx − v (x, y )dy
ω2 := v (x, y )dx + u(x, y )dy
sono Chiuse in A e se A ⊆ R2 è Semplicemente connesso
sono Esatte in A
A. Cutrı̀
17-11-2014
Metodi Matematici per l’ingegneria–Ing. Gestionale