Attività di ricerca congiunta
sulle tecnologie UAV/RPAS
all’Università di Udine
D. Zorzetto (Airmap,Trieste)
A.Fusiello, A. Beinat, F. Crosilla (Università di Udine)
R.Toldo (3DFlow, Udine/Verona)
S. Orlando (GIS Independent Developer/Consultant, Udine)
UAV / RPAS in Italia
Piattaforme, regolamenti, applicazioni, problematiche
20-21 Febbraio 2014, Modena
PARTNER DI PROGETTO
Airmap ™ è system integrator nel settore degli Unmanned Aerial
System (UAS) – APR (Aeromobili a Pilotaggio Remoto). E’ stata
fondata nel 2013 e fornisce soluzioni e servizi all’avanguardia per
applicazioni di telerilevamento e di aerofotogrammetria.
CARTESIO Centro di Ricerca in Cartografia, Telerilevamento e
Sistemi Informativi Territoriali
DIEGM Dipartimento di Ingegneria Elettronica Gestionale Meccanica
DICA Dipartimento di Ingegneria Civile ed Architettura
3Dflow è un'azienda che produce software e servizi nel campo della
visione artificiale ed elaborazione delle immagini. È stata fondata nel
2011 come spin-off dell'università di Verona e dell'Università di Udine
dal 2012. 3Dflow fornisce soluzioni all'avanguardia nel campo della
modellazione 3D da immagini, elaborazione di dati 3D e manipolazione
di video 3D.
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
di Davide Zorzetto
Team multidisciplinare di ricercatori e professionisti con
specifiche competenze nel settore degli Unmanned Aerial
Systems (UAS).
Il team multidisciplinare è composto da
• ingegneri elettronici
• ingegneri aeronanutici
• piloti di Droni
• esperti in fotogrammetria, computer vision, telerilevamento
• sviluppatori di software per applicazioni geomatiche
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
di Davide Zorzetto
SETTORI DI RIFERIMENTO ED APPLICAZIONI
Le soluzioni offerte dai sistemi UAS sono utili a molteplici
settori e contesti, tra i quali:
Analisi e controllo dello stato degli edifici
Protezione civile
Analisi e controllo dello stato delle infrastrutture
Analisi e controllo del territorio
Termografia
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
Archeologia
Sicurezza
Aerofotogrammetria
Pubblicità
...
di Davide Zorzetto
REGOLAMENTO ENAC 16.12.2013
In evidenza il limite di quota operativa per
utilizzo professionale
•Quota massima = 70m
Classificazione delle attività in due categorie:
•Operazioni di Volo Critiche
•Operazioni di Volo non Critiche
Si rimanda al regolamento ENAC le
disposizioni previste per il settore
all’interno del territorio italiano.
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
di Davide Zorzetto
UAS PER USO CIVILE
L’interesse per i droni civili è oggi crescente a livello globale.
Si stima che vi siano 32 Paesi impegnati in programmi di sviluppo e di
perfezionamento della tecnologia, mentre 43 Paesi siano effettivi utilizzatori
di velivoli UAV.
Al gruppo degli UAV appartengono diverse tipologie di velivoli, ognuno con
specificità operative:
Quota operativa
Aerei
Elicotteri
Dirigibili
Multirotori
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
di Davide Zorzetto
PREVISIONI SEGMENTAZIONE DI MERCATO
UAV NEL MONDO
Previsione applicazioni UAV 2009-2015* nel mondo
Applicazioni Tecniche
*Fonte: Frost & Sullivan
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
di Davide Zorzetto
I Droni a pilotaggio remoto o autonomo, specificatamente costruiti per
applicazioni fotogrammetriche e per il telerilevamento possono
essere di vario tipo.
Attualmente le principali categorie si suddividono in
ELICOTTERI
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
MULTIROTORI
ALA FISSA
di Davide Zorzetto
DRONI MULTIROTORI (elettrici)
PRINCIPALI VANTAGGI
rispetto ai tradizionali mezzi (elicotteri ed aerei con pilota a bordo)
minori costi di intervento
possibilità di rimanere in hovering anche molto vicino all'oggetto della ripresa
possibilità di fare riprese in luoghi altrimenti non accessibili
riprese a bassa quota
silenziosità
facilità di trasporto
velocità di impiego
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
di Davide Zorzetto
ARCHITETTURA DEI MULTIROTORI
FLIGHT CONTROL: sistema che gestisce
l’alimentazione, i motori, le comunicazioni,
la navigazione e le anomalie integrando
tutti i dati provenienti dai sottosistemi
installati a bordo.
IMU: unità di misurazione inerziale.
La strumentazione è composta da 3
accelerometri e 3 giroscopi.
Motore 1
Motore 2
Regolatore
Regolatore
GPS & BUSSOLA: posizionamento geografico
REGOLATORI (ESC): Electronic Speed
Controller per la gestione dei motori
MOTORI: Il motore brushless è un motore
elettrico ad eccitazione indipendente. La
commutazione della corrente circolante negli
avvolgimenti avviene elettronicamente. Ciò
comporta una minore resistenza meccanica,
elimina la possibilità che si formino scintille al
crescere della velocità di rotazione, e riduce
notevolmente la necessità di manutenzione
periodica.
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
Flight
Control
Regolatore
Motore 4
Regolatore
Motore 3
di Davide Zorzetto
CARATTERISTICHE BASE DEI
DRONI MULTIROTORE
INTEGRATI NEL UAS ___
• Altamente customizzabili
• Elettronica di controllo altamente affidabile, dati di assetto disponibili
• Dimensionamento per Payload 300g, 600g, 1.5Kg, 3 Kg e su progetto
• Durata di volo massima (payload 300g) = 20 min
• Stabilizzazione del sensore con GIMBAL (2D/3D)
Payload 300g
Payload 600g
Payload 3Kg
• Propulsione elettrica ( Motori Brushless)
• Struttura in carbonio
• ottimizzati con sistema anti vibrazione
• elettronica configurabile secondo esigenze
• supporto sensori progettati su specifica del cliente
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
di Davide Zorzetto
SENSORI DISPONIBILI A BORDO DRONE
Integrati nel UAS ____
NEL VISIBILE – CAMERE FOTOGRAFICHE
TERMICI
MULTISPETTRALI (Agricoltura di precisione, calcolo indice NDVI)
Radiazione
VISIBILE
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
Radiazione
Termica
7.5um – 13um
Radiazione
R, G, NIR
(520nm-920nm)
di Davide Zorzetto
GESTIONE ATTIVITA’ DI VOLO
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
di Davide Zorzetto
ARCHITETTURA DEL SISTEMA UAS SVILUPPATO
GIS
Geographic
Information System
PIANIFICAZIONE
ACQUISIZIONE
ELABORAZIONE
ORTOFOTO
DEM
NUVOLE DI PUNTI
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
APPLICAZIONI FINALI
Altri GIS
Software per applicazioni Geomatiche
di Davide Zorzetto
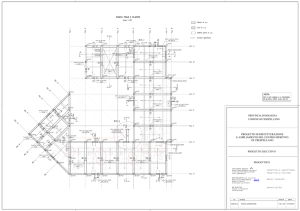
CASO DI STUDIO
Polo Scientifico dell’Università di Udine in via della Scienza 206
9 MAGGIO 2013
AREA DI ACQUISIZIONE
Presso il Polo Scientico dell’Università di Udine
Area della struttura principale= 2600 mq
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
di Davide Zorzetto
PIANIFICAZIONE
DATI DI INPUT
Luogo di acquisizione DEFINITO
Banda spettrale = VISIBILE
Risoluzione terra maggiore di (GSD )= 5cm
Scala della mappa = libera
SENSORE OTTICO
CANON POWER SHOT S100 da 12 Mpixel
CMOS (1/1.7’’) 12,1 megapixel
DIMENSIONE SENSORE = 7,53 x 5.64 mm
DIMENSIONE PIXEL = 1.87 um
PESO LORDO = 198 g
CALIBRAZIONE INTERNA DISPONIBILE = SI
FOGLIO DI CALCOLO A SUPPORTO
PER LA SCELTA DEL SENSORE
SCELTA DRONE
Payload = 300 g
GIMBAL = NO
Dati di assetto = DISPONIBILI
GPS = singola Frequenza
Tempo di Volo = 15 min
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
di Davide Zorzetto
FINE PIANIFICAZIONE
PRONTO AL VOLO
• PIANO DI VOLO DISPONIBILE
E CARICATO A BORDO DRONE
• PREVISIONE COPERTURA IMMAGINI
• DIREZIONE DI VOLO DEL DRONE
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
di Davide Zorzetto
PIANIFICAZIONE SVILUPPI
BLUR: ovvero mosso.
Il tool permette di verificare l’entità dell’effetto
di trascinamento in funzione dei parametri di
VOLO & FOTOCAMERA
CALCOLO AREA DI BUFFER PREVISTA
DA REGOLAMENTO ENAC
L’AREA DI BUFFER
DIPENDERA’ DA NUMEROSI
FATTORI, ANCHE DAL TIPO
DI DRONE, IL TOOL SI
PRESTA ALLA SIMULAZIONE
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
di Davide Zorzetto
ACQUISIZIONE
Condizioni Metereologiche
PIANO DI ACQUISIZIONE
LOCALITA
DATA
Udine 09/05/2013
TMEDIA °C
UMIDITA
%
VISIBILITA
km
VENTOMAX
km/h
PRESSIONESLM
mb
PIOGGIA mm
23
54
19
13
1015
0
35 IMMAGINI ACQUISITE
ORIENTAMENTO ESTERNO
MISURATO PER OGNI IMMAGINE
GSD:
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
2.81 cm
Lat,Long, yaw,pitch,roll
di Davide Zorzetto
ACQUISIZIONE
Il rilievo della rete dei GCP
- GCP identificati dopo il volo
(post mission) dalle immagini
acquisite dal drone;
- Rilievo dei GCP mediante
posizionamento GPS L1+L2
stop&go in post-elaborazione
rispetto a master locale;
Rilevati 24 GCP
Precisione: +/- 1 cm rms
- Inquadramento dei GCP nel
sistema UTM-F33/ETRS89
mediante collegamento del
master locale alle CORS della
rete FReDNet dell’OGS
tramite sessione GPS statica;
- Post-elaborazione adottata
per consentire maggior
controllo di qualità della
soluzione ( +/- 1 cm rms);
- In produzione, NRTK
costituisce la tecnica elettiva.
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
Distribuzione GCP
Area di Test
di Davide Zorzetto
ELABORAZIONE
POSIZIONE DELLE PRESE
RICOSTRUZIONE 3D
•27 IMMAGINI
•Tie-points: 151262
•AREA = 0.0320815 sq km
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
di Davide Zorzetto
ELABORAZIONE
DETTAGLIO MESH DI RICOSTRUZIONE
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
di Davide Zorzetto
ELABORAZIONE
RICOSTRUZIONE A
27 IMMAGINI
ORIENTAMENTO
MODELLO CON GCP DI
ALTA PRECISIONE
RICOSTRUZIONE B
27 IMMAGINI
ORIENTAMENTO MODELLO
CON DATI GPS MISURATI A
BORDO DRONE (ASSETTO
CAMERE NON VINCOLATO)
GENERAZIONE
ORTOFOTO DA GCP
“DI RIFERIMENTO”
GENERAZIONE ORTOFOTO
DA “GEOREFERENZIAZIONE
DIRETTA”
Stima dell’errore di
posizionamento
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
di Davide Zorzetto
ELABORAZIONE
GENERAZIONE ORTOFOTO
UTILIZZATI 18 GCP
STIMA ERRORE
DIRETTAMENTE IN
AMBIENTE 3D
Stima errore di ricostruzione
19 cm
In E,N,H
Residuo (m)
RESIDUO
vettore(E,N,H)
Rispetto GCP
Mean
1.94E-01
Variance
1.21E-02
GCP
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
di Davide Zorzetto
ELABORAZIONE
GENERAZIONE ORTOFOTO
MISURE GPS A BORDO
DRONE
STIMA ERRORE
DIRETTAMENTE IN
AMBIENTE 3D
2.61 metri
In E,N,H
Residuo (m)
RESIDUO
vettore(E,N,H)
Rispetto GCP
Mean
2.61E+00
Variance
7.47E-01
GCP
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
di Davide Zorzetto
OTTIMIZZAZIONE
• PER CONTENERE IL RESIDUO FINALE
• E PER AUMENTARE LA PRODUTTIVITA’ DEL SISTEMA E RIDURRE I
COSTI, COMPATIBILMENTE CON LA QUALITA’ DEL PRODOTTO,
E’ POSSIBILE EVITARE DI RILEVARE I GCP
A PARITA’ DI CONDIZIONI POSSIAMO MIGLIORARE IL POSIZIONAMENTO GPS
UTILIZZO DELLA CORREZIONE DIFFERENZIALE DGPS
ELETTRONICA DISPONIBILE A BORDO DRONE (in tempo reale)
la sperimentazione sul posto è rimandata per i vincoli del regolamento ENAC
MA ABBIAMO GLI STRUMENTI PER SIMULARNE L’EFFETTO
dE,dN,dH
SIMULAZIONE RUMORE UNIFORME
DI AMPIEZZA 1m RISPETTO ALL
POSIZIONE GPS STIMATA DALLA
RICOSTRUZIONE SUI GCP
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
1m
DGPS
GPS da GCP
di Davide Zorzetto
ELABORAZIONE
GENERAZIONE ORTOFOTO
MISURE GPS A BORDO
DRONE CON correzione
differenziale DGPS *simulata
STIMA ERRORE
DIRETTAMENTE IN
AMBIENTE 3D
0.578 metri
In E,N,H
Residuo (m)
RESIDUO
vettore(E,N,H)
Rispetto GCP
Mean
5.78E-01
Variance
2.11E-01
GCP
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
di Davide Zorzetto
ELABORAZIONE - VERIFICA
OEM5 GPS
AM5 DGPS
GCP5
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
di Davide Zorzetto
CONCLUSIONI
LA COLLABORAZIONE HA PRODOTTO
LA MESSA A PUNTO DI UN PROCESSO UAS COMPLETO
PER APPLICAZIONI FOTOGRAMMETRICHE
UNO STRUMENTO PER PIANIFICARE L’ATTIVITA’ DI VOLO
CON SUPPORTO CARTOGRAFICO
LA CALIBRAZIONE DEL SOFTWARE DI RICOSTRUZIONE 3D
A FINI AEROFOTOGRAMMETRICI
ED INOLTRE
UTILIZZANDO IL SOFTWARE DI RICOSTRUZIONE COME UN
SIMULATORE SIAMO IN GRADO DI PREVEDERE L’EFFETTO
SULLA CARTOGRAFIA DELLA CORREZIONE DIFFERENZIALE
IMPLEMENTATA SU DRONE
INTEGRAZIONE DEL DGPS NELL’ELETTRONICA A BORDO DRONE
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
di Davide Zorzetto
SVILUPPI FUTURI
INTEGRAZIONE NEL PROCESSO UAS DEL REGOLAMENTO ENAC
COMPLETA AUTOMAZIONE DEL SOFTWARE DI PIANIFICAZIONE
AGGIUNTA DI ULTERIORI TOOLS ED AUTOMATISMI DI CONTROLLO QUALITA’
MIGLIORAMENTO CONTINUO DELLA PIATTAFORMA DI VOLO
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
di Davide Zorzetto
WWW.AIRMAP.IT
Geomatica.Uniud.it
www2.diegm.uniud.it/diegm/
dica.uniud.it
www.3dflow.net
GRAZIE PER L'ATTENZIONE
UAV / RPAS in Italia
20-21 Febbraio 2014, Modena
di Davide Zorzetto