SIEIDrive
Inverter vettoriale per ascensori
con motori sincroni / asincroni
ADL200
.... Guida rapida all’installazione
Specifiche e collegamento
Informazioni riguardo a questo manuale
La Guida rapida dell’ADL200 è il manuale in forma ridotta per l’installazione meccanica, il collegamento elettrico e la
rapida messa in servizio.
Potete trovare nel CD fornito con il Drive il manuale delle funzioni e descrizione dei parametri, e i manuali delle espansioni e bus di campo.
Versione software
Questo manuale è aggiornato alla versione software V 3.X.0
Variazioni del numero inserito al posto della “X” non hanno influsso sulla funzionalità dell’apparecchio.
Il numero di identificazione della versione software può essere letto sulla targhetta del Drive oppure può essere verificato con il parametro Ver rel firmware - PAR 490, menu 2.6.
Informazioni generali
Nota ! I termini “Inverter”, “Regolatore” e “Drive” sono talvolta intercambiati nell’industria. In questo documento verrà utilizzato il termine “Drive”.
Prima dell’utilizzo del prodotto, leggere attentamente il capitolo relativo alle istruzioni di sicurezza.
Durante il suo periodo di funzionamento conservate il manuale in un luogo sicuro e a disposizione del personale tecnico.
Gefran spa si riserva la facoltà di apportare modifiche e varianti a prodotti, dati, dimensioni, in qualsiasi momento
senza obbligo di preavviso.
I dati indicati servono unicamente alla descrizione del prodotto e non devono essere intesi come proprietà assicurate
nel senso legale.
Vi ringraziamo per avere scelto questo prodotto Gefran.
Saremo lieti di ricevere all’indirizzo e-mail: [email protected] qualsiasi informazione che possa aiutarci a migliorare
questo manuale.
Tutti i diritti riservati.
2
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
Sommario
Informazioni riguardo a questo manuale........................................................................................ 2
1 - Istruzioni di sicurezza................................................................................................................. 5
1.1 Simboli utilizzati nel manuale............................................................................................................................................... 5
1.2 Precauzioni di sicurezza....................................................................................................................................................... 5
1.3 Avvertenze generali.............................................................................................................................................................. 5
1.4 Istruzioni per la conformità con il marchio UL (requisiti UL), norme elettriche U.S.A e Canada........................................... 6
2 - Introduzione al prodotto............................................................................................................. 7
2.1 Caratteristiche dedicate........................................................................................................................................................ 7
2.2 Altre caratteristiche............................................................................................................................................................... 8
2.3 Identificazione componenti................................................................................................................................................... 8
2.4 Identificazione del prodotto................................................................................................................................................... 9
2.5 Configurazioni standard...................................................................................................................................................... 11
3 - Trasporto e immagazzinaggio.................................................................................................. 13
3.1 Generalità........................................................................................................................................................................... 13
3.2 Condizioni ambientali ammesse......................................................................................................................................... 13
4 - Specifiche................................................................................................................................... 14
4.1 Condizioni ambientali......................................................................................................................................................... 14
4.2 Normative........................................................................................................................................................................... 14
4.3 Precisione........................................................................................................................................................................... 14
4.3.1 Controllo di velocità.............................................................................................................................................................................14
4.3.2 Limiti di controllo di velocità.................................................................................................................................................................14
4.3.3 Controllo di coppia..............................................................................................................................................................................14
4.3.4 Prestazioni di corrente.........................................................................................................................................................................14
4.4 Dati elettrici in ingresso...................................................................................................................................................... 15
4.5 Dati elettrici in uscita........................................................................................................................................................... 15
4.5.1 Declassamento delle prestazioni in regime di sovraccarico................................................................................................................16
4.5.2 Declassamento della frequenza di switching......................................................................................................................................16
4.5.3 Kalt: Fattore di riduzione per temperatura ambiente...........................................................................................................................16
4.6 Livello di tensione dell’inverter per operazioni di sicurezza...................................................................................................... 16
4.7 Consumi a vuoto (Classificazione energetica)......................................................................................................................... 17
4.8 Ventilazione........................................................................................................................................................................ 17
4.9 Dimensioni e pesi............................................................................................................................................................... 18
5 - Opzioni........................................................................................................................................ 21
5.1 Fusibili esterni opzionali .................................................................................................................................................... 21
5.1.1 Fusibili lato rete (F1)............................................................................................................................................................................21
5.2 Induttanze di ingresso........................................................................................................................................................ 21
5.2.1 Induttanze d’ingresso AC....................................................................................................................................................................21
5.2.2 Induttanze d’ingresso DC....................................................................................................................................................................22
5.3 Induttanze d’uscita AC........................................................................................................................................................ 22
5.4 Resistenza di frenatura esterne (opzionali)........................................................................................................................ 23
5.5 Filtri EMC (opzionali).......................................................................................................................................................... 23
6 - Installazione meccanica............................................................................................................ 24
6.1 Massima inclinazione e distanze di montaggio.................................................................................................................. 24
6.2 Quote di fissaggio............................................................................................................................................................... 25
7 - Collegamento elettrico.............................................................................................................. 27
7.1 Parte di potenza................................................................................................................................................................. 28
7.1.1 Sezione dei cavi..................................................................................................................................................................................28
7.1.2 Collegamento schermatura (consigliato).............................................................................................................................................29
7.1.3 Linee guida per la Compatibilità Elettromagnetica (EMC)..................................................................................................................29
7.1.4 Schema a blocchi parte di potenza.....................................................................................................................................................30
7.1.5 Filtro EMC interno (di serie)................................................................................................................................................................31
7.1.6 Collegamento linea di alimentazione..................................................................................................................................................31
7.1.7 Collegamento induttanza AC e DC (opzionali) ...................................................................................................................................31
7.1.8 Collegamento del motore....................................................................................................................................................................32
7.1.9 Collegamento resistenza di frenatura (opzionale)...............................................................................................................................32
7.2 Parte di regolazione............................................................................................................................................................ 33
7.2.1 Sezione dei cavi..................................................................................................................................................................................33
7.2.2 Collegamento scheda I/O....................................................................................................................................................................33
7.2.3 Collegamento schede di Retroazione standard..................................................................................................................................35
7.3 LED..................................................................................................................................................................................... 37
7.4 Schemi di collegamento..................................................................................................................................................... 38
7.4.1 Potenziali della regolazione, I/O digitali..............................................................................................................................................38
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
3
7.4.2 Schema tipico di collegamento...........................................................................................................................................................39
7.4.3 Schema collegamento di emergenza..................................................................................................................................................41
7.5 Interfaccia seriale (Connettore PC).................................................................................................................................... 44
7.5.1 Collegamento punto-punto Drive / Porta RS232.................................................................................................................................44
7.6 Interfaccia CAN.................................................................................................................................................................. 45
7.7 Interfaccia Tastierino (Connettore Keypad)........................................................................................................................ 46
7.8 Memorizzazione dati su Memory Card............................................................................................................................... 46
7.9 Frenatura............................................................................................................................................................................ 46
7.9.1 Unità di frenatura interna.....................................................................................................................................................................47
8. Utilizzo del tastierino.................................................................................................................. 48
8.1 Descrizione......................................................................................................................................................................... 48
8.1.1 Tastiera a membrana...........................................................................................................................................................................48
8.1.2 Significato dei Leds.............................................................................................................................................................................48
8.2 Navigazione........................................................................................................................................................................ 49
8.2.1 Scansione dei menu di primo e di secondo livello..............................................................................................................................49
8.2.2 Visualizzazione di un parametro.........................................................................................................................................................49
8.2.3 Scansione dei parametri.....................................................................................................................................................................50
8.2.4 Lista degli ultimi parametri modificati..................................................................................................................................................50
8.2.5 Funzione “FIND”..................................................................................................................................................................................50
8.3 Modifica parametri.............................................................................................................................................................. 50
8.4 Salvataggi parametri........................................................................................................................................................... 51
8.5 Configurazione display....................................................................................................................................................... 52
8.5.1 Selezione della lingua.........................................................................................................................................................................52
8.5.2 Selezione Facile/Esperto....................................................................................................................................................................52
8.5.3 Startup display.....................................................................................................................................................................................52
8.5.4 Retroilluminazione display..................................................................................................................................................................52
8.6 Allarmi................................................................................................................................................................................. 52
8.6.1 Reset degli allarmi...............................................................................................................................................................................52
8.7 Messaggi............................................................................................................................................................................ 53
8.8 Salvataggio e recupero nuove impostazione parametri..................................................................................................... 53
8.8.1 Selezione della memoria del tastierino...............................................................................................................................................53
8.8.2 Salvataggio dei parametri sul tastierino..............................................................................................................................................53
8.8.3 Recupero dei parametri dal tastierino.................................................................................................................................................54
8.8.4 Trasferimento parametri tra Drive........................................................................................................................................................54
8.9 Salvataggio e recupero nuove impostazione parametri su Memory card........................................................................... 54
9 - Messa in servizio da tastierino . .............................................................................................. 55
9.1 Avviamento guidato motore asincrono .............................................................................................................................. 56
9.2 Avviamento guidato per motori brushless........................................................................................................................... 63
10 - Risoluzione ai problemi.......................................................................................................... 70
10.1 Allarmi............................................................................................................................................................................... 70
10.2 Allarme Perd Retroaz in funzione del tipo di retroazione.................................................................................................. 73
10.2.1 Reset allarme Perd Retroaz..............................................................................................................................................................75
10.2.2 Allarme Errore encoder.....................................................................................................................................................................75
10.3 Messaggi.......................................................................................................................................................................... 76
Appendice........................................................................................................................................ 79
A.1 - ADL200 Configurazione Basic......................................................................................................................................... 79
A.1.2 - Installazione schede di Espansione.................................................................................................................................................80
A.2 - Schede I/O....................................................................................................................................................................... 81
A.2.1 - Caratteristiche Ingressi/Uscite..........................................................................................................................................................83
A.3 - Encoder e schede Espansione Encoder.......................................................................................................................... 85
A.3.1 - Encoder............................................................................................................................................................................................85
A.3.2 - Fasatura............................................................................................................................................................................................86
A.3.3 - Schede Encoder ..............................................................................................................................................................................87
A.4 - Sistema di monitoraggio del freno................................................................................................................................... 94
A.4.1 Introduzione........................................................................................................................................................................................94
A.4.2 Configurazione allarme avaria Freno..................................................................................................................................................95
A.4.3 Manutenzione della funzione avaria Freno.........................................................................................................................................95
A.4.4 Diagnostica Guasti..............................................................................................................................................................................95
4
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
1 - Istruzioni di sicurezza
1.1 Simboli utilizzati nel manuale
Indica una procedura oppure una condizione di funzionamento che, se non osservate, possono essere causa di morte o danni a persone.
Avvertenza!
Indica una procedura oppure una condizione di funzionamento che, se non osservate, possono causare il danneggiamento o la distruzione dell’apparecchiatura.
Attenzione!
Indica che la presenza di scariche elettrostatiche potrebbe danneggiare l’apparecchiatura. Quando si maneggiano le
schede, indossare sempre un braccialetto con messa a terra.
Indica una procedura oppure una condizione di funzionamento la cui osservanza può ottimizzare queste applicazioni.
Importante!
Nota ! Richiama l’attenzione a particolari procedure e condizioni di funzionamento.
Personale qualificato
Ai fini del presente Manuale d’istruzioni, una “persona qualificata” è una persona competente in materia di installazione, montaggio, avviamento e funzionamento dell’apparecchio e dei pericoli inerenti. Questo operatore deve essere in
possesso delle seguenti qualifiche:
- addestramento per prestazioni di pronto soccorso
- addestramento per cura e impiego delle attrezzature protettive secondo le procedure di sicurezza stabilite
- addestramento ed autorizzazione ad alimentare, disalimentare, verificare gli isolamenti, mettere a terra ed etichettare circuiti ed apparecchi secondo le procedure di sicurezza stabilite.
Utilizzare solo per le condizioni previste
Si può usare il sistema di azionamento elettrico (Drive elettrico + impianto) solo per le condizioni e gli ambienti di utilizzo previste nel manuale e solo unitamente a dispositivi e componenti raccomandati ed autorizzati da Gefran.
1.2 Precauzioni di sicurezza
Le seguenti istruzioni sono fornite per la sicurezza dell’utilizzatore e per evitare danni al prodotto o ai componenti nelle
macchine collegate. La sezione elenca istruzioni che si applicano generalmente quando si gestiscono Drive elettrici.
Istruzioni specifiche, che si applicano ad azioni particolari, sono elencate all’inizio di ogni capitolo.
Leggere attentamente le informazioni che sono riportate per la sicurezza personale e intese inoltre a prolungare la vita
utile del Drive, nonché dell’impianto ad esso collegato.
1.3 Avvertenze generali
Avvertenza!
Questo apparecchio utilizza tensioni pericolose e controlla parti meccaniche rotanti potenzialmente pericolose. La
non conformità con le Avvertenze o l’inosservanza delle istruzioni contenute in questo manuale può provocare morte,
lesioni personali gravi o danni seri ai materiali.
I Drive causano movimenti meccanici. L’utente ha la responsabilità di assicurare che questi movimenti meccanici non
si traducano in condizioni di insicurezza. I blocchi di sicurezza ed i limiti operativi previsti dal costruttore non possono essere bypassati o modificati.
Solo personale adeguatamente qualificato deve intervenire su questo apparecchio, e solo dopo aver compreso tutte
le informazioni sulla sicurezza, le procedure di installazione, funzionamento e manutenzione contenute in questo
manuale. Il funzionamento sicuro ed efficace di questo apparecchio dipende dalla corretta esecuzione della movimentazione, installazione, funzionamento e manutenzione.
In caso di guasti, il Drive, anche se disabilitato, può causare dei movimenti accidentali se non è stato sconnesso
dalla linea di alimentazione di rete.
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
5
Pericolo di scossa elettrica
I condensatori del DC link rimangono carichi ad una tensione pericolosa anche dopo che è stata rimossa la tensione
di alimentazione
Non aprire il dispositivo oppure i coperchi mentre il drive è alimentato. Il tempo di attesa minimo prima di poter agire
sui morsetti oppure all’interno del dispositivo è indicato nel capitolo 4.6.
Pericolo di Incendio e Scossa Elettrica:
Quando si utilizzano dispositivi di misura (es. oscilloscopi) che funzionano su apparecchiature in tensione, la
carcassa dell’oscilloscopio deve essere messa a terra e deve essere utilizzata una sonda differenziale. Per ottenere
letture accurate, scegliere con cura sonde e terminali e prestare attenzione alla regolazione dell’oscilloscopio. Fare
riferimento al manuale d’istruzione del costruttore per un corretto impiego e per la regolazione della strumentazione.
Pericolo di Incendio e di Esplosione:
L’installazione dei Drive in aree a rischio, dove siano presenti sostanze infiammabili o vapori combustibili o polveri,
può causare incendi o esplosioni. I Drive devono essere installati lontano da queste aree a rischio anche se vengono
utilizzati con motori adatti per l’impiego in queste condizioni.
1.4 Istruzioni per la conformità con il marchio UL (requisiti UL), norme elettriche U.S.A e Canada
Valori di cortocircuito
Gli inverter ADL200 devono essere collegati a una rete in grado di fornire una potenza di corto circuito simmetrica
inferiore o uguale a "xxxx A rms (a 480 V +10% V max).
I valori della corrente di cortocircuito "xxxx" Arms, in conformità con i requisiti UL ( UL 508 c ) per ciascuna potenza
motore (Pn mot nel manuale) sono indicati nella tabella seguente.
Valore corrente di cortocircuito
Pn mot (kW
SCCR ( A ) @480Vac
1,1...37,3
5000
39....149
10000
Nota! Il drive verrà protetto da fusibili a semiconduttore, come specificato nel manuale di istruzioni.
Protezione circuito di derivazione
Per proteggere il drive da sovracorrenti, utilizzare i fusibili indicati al par. 5.1.
Condizioni ambientali
Il drive deve essere considerato un "Open type equipment". Temperatura massima dell'ambiente pari a 40°C. Grado
di inquinamento 2.
Cablaggio dei terminali di ingresso e uscita
Utilizzare cavi "UL Listed" a 75°C e terminali a crimpare. Crimpare i terminali con utensile consigliato dal produttore dei
terminali.
Fissare i terminali con la coppia di serraggio specificata nel par. 7.1.1.
Controllo di sovratensione
In conformità con i requisiti CSA, le sovratensioni al morsetto di rete vengono controllate installando un dispositivo di
protezione alle sovratensioni come segue :
Tipo OVR 1N 15 320 da ABB o simile.
Tempo minimo necessario per tensione sicura di DC bus
Prima di rimuovere la copertura del drive per accedere alle parti interne, attendere il tempo indicato di seguito, dopo la
disconnessione dalla rete :
Taglia drive
Tempo di sicurezza ( sec )
taglia 1.....5
300
Sovravelocità; limite corrente/sovraccarico; sovraccarico motore
Il drive integra le protezioni di sovravelocità, limite di corrente/sovraccarico, protezione da sovraccarico del motore. Il
manuale di istruzioni specifica il grado di protezione e le istruzioni dettagliate per l'installazione.
6
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
2 - Introduzione al prodotto
SIEIDrive ADL200 nasce dall’esperienza GEFRAN nel settore del sollevamento civile, sviluppata grazie alla costante e
stretta collaborazione tecnica ed applicativa al fianco dei principali operatori del settore.
ADL200 integra le più complete ed avanzate soluzioni settoriali, per offrire la massima sinergia con le molteplici esigenze di installazione ma soprattutto per rendere economico ed immediato l’impiego degli azionamenti elettrici nelle
tecnologie di controllo Lift.
Si tratta di un Drive realizzato per alimentare carichi quali motori asincroni o sincroni a magneti permanenti (Brushless), per applicazioni nel settore specifico del sollevamento.
Grazie alle ridotte dimensioni meccaniche può essere montato in armadi per applicazioni roomless.
Questa serie di drives può essere utilizzata in applicazioni lift da 0,5 a 4 mt/sec con carichi fino a 1600kg.
Le modalità di controllo disponibili, in accordo al firmware installato, sono:
•ADL...-...-AC: Firmware per motore asincrono
Modalità: Controllo vettoriale ad orientamento di campo - Controllo vettoriale Sensorless - Controllo SSC (Sensorless
Scalar Control) avanzato (default).
•ADL...-...-BR: Firmware per motore sincrono
Modalità: Controllo motori sincroni a magneti permanenti.
2.1 Caratteristiche dedicate
ADL200 integra in un unico prodotto le funzioni lift fondamentali ed evolute, per garantire sempre il massimo confort di
ogni impianto.
•Controllo di velocità
Funzione EFC (Elevator Floor Control): applicazione indipendente per la gestione autonoma dei piani corti, della “landing zone”, delle ripartenze fuori piano e del calcolo automatico del punto di decelerazione.
•Controllo di posizione (in sviluppo)
Funzione EPC (Elevator Positioning Control): applicazione indipendente per la gestione automatica dell’arrivo diretto al
piano con regolatore di posizione interno e memorizzazione della distanza piani (autoapprendimento impianto).
•Sequenza Ascensore
Sequenza tipica dei segnali di ingresso / uscita utilizzati nell’applicazione di sollevamento civile come gestione I/O,
frenatura, comando contattori contattori di uscita & controllo porta.
•Parametri in unità lineare
Possibilità di selezionare differenti unità ingegneristiche per i principali parametri che determinano il movimento, rpm
oppure m/s per velocità, m/s², m/s³ per accelerazioni riferite alla cabina.
•Parametri meccanici ascensore Parametri del sistema meccanico come diametro Puleggia e Rapporto di Trasmissione per la conversione tra unità di
sistemi e pesi, sistema per il calcolo dell’inerzia e la regolazione della velocità per la risposta desiderata.
•Generazione Rampa
Configurazione indipendente dei parametri per le rampe di accellerazione e decelerazione e dei 4 “jerk” per il massimo
confort di viaggio della cabina ascensore Due Rampe ad S indipendenti, selezionabili tramite ingresso digitale con 4
impostazioni jerk indipendenti. Decelerazione di rampa dedicata corrispondente al comando di stop.
•Multi velocità
8 valori di riferimenti di velocità impostabili internamente al Drive. All’avvio, possibilità di sovrascrivere con valori addizionali per ottenere partenze regolari.
•Pre-torque (Compensazione del carico)
Inizializzazione del regolatore di velocità dal sensore peso per evitare strappi o irregolarità all’avvio.
•Sovraccarico maggiorato
Capacità di sovraccarico corrispondente al tipico ciclo di carico utilizzato nelle applicazioni per ascensori.
•Funzione controllo logico ventilatore
La funzione controllo logico ventilatore consente di avviare i ventilatori interni in funzione della temperatura.
•Modulo per Alimentazione di Emergenza
Il Modulo per Alimentazione di Emergenza (EMS) consente di effettuare manovre di emergenza dell’ascensore (è
richiesto il gruppo di batterie). E’ necessario che il modulo sia collegato al morsetto EM sulla scheda di potenza
dell’inverter. Per le specifiche tecniche fare riferimento al manuale utente EMS.
•Alimentazione monofase d’emergenza
E’ possibile utilizzare in condizioni di emergenza una tensione di alimentazione monofase 230V per il ritorno al piano
della cabina.
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
7
•Menù a utilizzo facilitato
Menù con distinta terminologia per ascensori per VISUALIZZAZIONE e AVVIAMENTO motore.
•Salvataggio parametri
La memorizzazione dei parametri del Drive può avvenire su tastierino (5 set) o su scheda di memoria Secure Digital)
•Bus di campo
Il Drive supporta un controllo remoto tramite protocollo CANopen (DS402) o DCP3/DCP4.
2.2 Altre caratteristiche
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
Procedura di autoapprendimento dei parametri motore e fasatura automatica per motori brushless.
La modulazione SSC (Sensorless Scalar Control) mantiene al minimo il livello del rumore.
Frequenza di switching fissa a 10 kHz.
Tensione di uscita fino al 98% della tensione in ingresso.
Messaggi memorizzati per gli ultimi 30 interventi e indicazione temporale di intervento.
Protezione sovraccarico per Drive, motore e unità di frenatura.
Possibilità di adattare il Drive all’impianto mediante selezione di diverse schede di I/O digitali ed analogici
Gestione di diversi tipi di dispositivi per retroazione velocità (encoder digitale, SinCos, EnDat, SSI, Hiperface).
Adattativo del regolatore di velocità.
Segnalazione funzioni della velocità.
Semplice utilizzo dell’apparecchio via:
- morsettiera
- tastierino opzionale di semplice ed immediato utilizzo, con sistema di fissaggio magnetico e possibilità di remotazione fino a
15mt
- linea seriale RS232 integrata con protocollo Modbus RTU e tecnologia per interfacciamento remoto “wireless” con dispositivi
Bluetooth ®.
Gli azionamenti sono dotati di IGBTs (insulated gate bipolar transistors).
L’uscita è protetta contro la messa a terra accidentale ed il corto circuito di fase in uscita.
Alimentazione del regolatore di velocità mediante unità switched-mode power supply dal circuito DC bus.
Protezione contro i buchi di rete.
Isolamento galvanico tra parte di potenza e parte di regolazione.
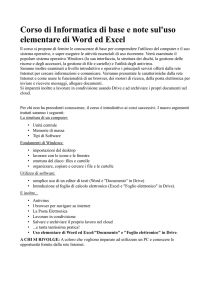
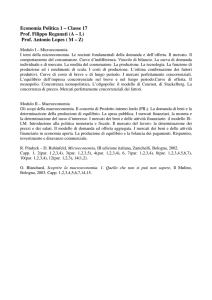
2.3 Identificazione componenti
L’inverter converte la frequenza e la tensione costanti di una rete trifase esistente in una tensione continua, e ricava da
quest’ultima una nuova rete trifase con tensione e frequenza variabili. Questa rete trifase variabile consente di regolare
con continuità la velocità di motori asincroni e sincroni trifasi.
3
4
5
7
8
2
1
M
3
6
1. Tensione di alimentazione di rete
2. Induttanza di rete (vedere capitolo 5.2)
3. Ponte raddrizzatore trifase
Converte una tensione alternata in una tensione continua tramite un ponte trifase ad onda intera.
4. Circuito intermedio
Con resistenza di precarica e condensatori di spianamento Tensione continua (Udc) =√2 x tensione di rete (Uln)
5. Ponte Inverter ad IGBT
Converte la tensione continua in una tensione alternata trifase ad ampiezza e frequenza variabile
6. Parte di controllo configurabile
Schede per il controllo e la regolazione della parte di potenza ad anello chiuso ed aperto. Ad esse vengono collegati comandi, riferimenti e retroazioni.
7. Tensione d’uscita
Tensione trifase alternata.
8. Encoder per retroazione di velocità (vedere Appendice, sezione A.3)
8
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
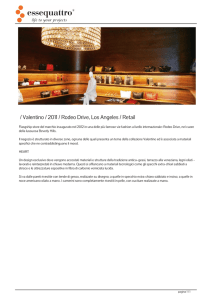
2.4 Identificazione del prodotto
I dati tecnici fondamentali dell’inverter sono documentati nella sigla e sulla targhetta identificativa.
La scelta dell’inverter viene fatta in base alla corrente nominale del motore.
La corrente nominale d’uscita del Drive deve essere maggiore oppure uguale alla corrente di targa del motore impiegato.
La velocità del motore asincrono dipende dal numero di paia poli e dalla frequenza (dati di targa e di catalogo).
Nel caso di funzionamento di un motore a velocità superiore alla sua nominale, consultare il costruttore del motore
per i problemi meccanici che ne derivano (cuscinetti, sbilanciamento etc.). Analogamente, per motivi termici, in caso
di funzionamento continuativo a frequenza inferiore a circa 20 Hz (ventilazione insufficiente, a meno che il motore non
disponga di ventilazione assistita).
Designazione modello (sigla)
ADL 220 - 1 040 - X B L - F - AC 4 - C
CANBus:
C = incluso
Tensione nominale:
2 = 230Vca
4 = 400Vca
Tipo motore:
AC = asincrono
BR = sincrono a magneti permanenti (brushless)
Filtro EMI:
F = incluso
Applicazione lift:
L = inclusa
Unità di frenatura:
X = non inclusa
B = inclusa
Tastierino:
X = non incluso
K = incluso
Potenza inverter in kW:
040 = 4kW
055 = 5,5kW
075 = 7,5kW
110 = 11kW
150 = 15kW
185 = 18,5kW
220 = 22kW
300 = 30kW
370 = 37kW
450 = 45kW
550 = 55kW
750 = 75kW
Dimensioni meccaniche del
Drive:
3 = taglia 3
1 = taglia 1
4 = taglia 4
2 = taglia 2
5 = taglia 5
Modalità regolazione:
200 = BASIC, vedere Appendice
210 = Sensorless
220 = Asincrono – Anello chiuso
230 = Brushless con scheda SinCos
231 = Brushless con scheda EnDat
Inverter, serie ADL200
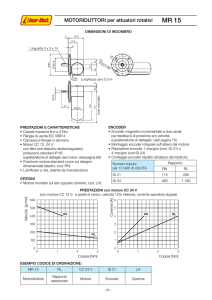
Designazione modello (sigla) - ADL130 Monofase (controllo di motori sincroni con encoder SinCos)
ADL 130 - X XXX - X X L - BR - 2M
Tensione nominale:
2M = 1 x 230Vca
Tipo motore:
BR = sincrono a magneti permanenti (brushless)
Applicazione lift:
L = inclusa
Unità di frenatura:
X = non inclusa
B = inclusa
Tastierino:
X = non incluso
Potenza inverter in kW:
011 = 1,1kW
015 = 1,5kW
022 = 2,2kW
030 = 3kW
040 = 4kW
055 = 5,5kW
Dimensioni meccaniche del
Drive:
1 = taglia 1
3 = taglia 3
2 = taglia 2
Modalità regolazione:
130 = Brushless con scheda SinCos
Inverter, serie ADL
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
9
Targhetta di identificazione
Numero di serie
Modello inverter
Ingresso (tensione di alimentazione, frequenza,
Corrente di ingresso a coppia costante)
Uscita (tensione, frequenza, potenza, corrente,
sovraccarico)
Type :
ADL210-1040-XBL -F-AC4
Inp:
230Vac-480Vac (Fctry set=400)
12.5A@400Vac
S/N: 09012345
50/60Hz
3Ph
11A@480Vac
Out : 0-480Vac 300Hz 3Ph
4kW@400Vac 5 Hp @ 460Vac
9A @400V Ovld . 200%-10s
8.10A@460V Ovld.200%-10s
Approvazioni
Targhetta revisione firmware e schede
Ubicazione delle targhette sul Drive
10
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
-.E
-.C
S
S/N
09012345
BU
SW . CFG
Prod.
CONF
-----
A1
Configurazione
prodotto
R
Revisione software
(configuratore)
P
Sicurezza
Revisione schede
A
F
Unità di frenatura
------
D
Potenza
Revisione firmware
HW release
Regolazione
Firmware
Release
2.5 Configurazioni standard
Scheda espansione I/O
IO Expansion card
EXP-IO-...
Scheda espansione retroazione
Encoder Expansion card
EXP-DE-... , EXP-SE, ...
Scheda Regolazione
Regulation card
R-ADL , RC-ADL
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
11
KB-ADL
Varie
Tastiera di programmazione con memoria
KIT KEY SD-CARD
Adattatore per scheda SD (memoria per caricamento dati)
KIT-POWER-SHIELD
Kit per schermatura cavi di potenza
R-ADL
Regolazione
Scheda di regolazione base
RC-ADL
Scheda di regolazione con CAN integrato
EXP-IO-D8R4-ADL
Scheda I/O
8 Ingressi digitali + 4 uscite relè
EXP-IO-D5R3-F-ADL
EXP-DE-I1R1F2-ADL
Encoder digitale 3 Canali + Ripetizione + 2 Freeze
Schede Encoder
EXP-SESC-I1R1F2-ADL
Encoder sinusoidale SinCos 3 Canali + Ripetizione + 2 Freeze
Encoder sinusoidale - Assoluto EnDat + Ripetizione + 2 Freeze
Brushless (SinCos)
ADL130 – ... – XBL – BR-2M
Brushless + CAN (Endat)
ADL231 – ... – XBL – F – BR4 - C
Brushless (Endat)
ADL231 – ... – XBL – F – BR4
Brushless + CAN (SinCos)
ADL230 – ... – XBL – F – BR4 - C
Brushless (SinCos)
ADL230 – ... – XBL – F – BR4
Anello chiuso - Asincrono + CAN
ADL220 – ... – XBL – F – AC4 - C
Anello chiuso - Asincrono
ADL220 – ... – XBL – F – AC4
S5P2T
S72644
O
S72610
------
O
O
O
------
O
O
O
O
O
S568L
O
S5L08
5 Ingressi digitali + 3 uscite relè
EXP-EN/SSI-I1R1F2-ADL
Sensorless
Codice
ADL210 – ... – XBL – F – AC4
TIpo / Descrizione
S5L04
S5L06
S5L07
= di serie, = opzionale , O= non possibile
Nota! In Appendice sono indicate tutte le schede opzionali I/O ed Encoder disponibili per le versioni ADL200 Basic o a richiesta.
12
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
3 - Trasporto e immagazzinaggio
La corretta esecuzione del trasporto, immagazzinaggio, installazione e montaggio, nonché il funzionamento e la manutenzione accurati sono essenziali per il funzionamento adeguato e sicuro dell’apparecchio.
Attenzione!
Proteggere l’inverter da urti e vibrazioni durante il trasporto e l’immagazzinamento. Assicurarsi inoltre che sia protetto dall’acqua (pioggia), dall’umidità e dalle temperature eccessive.
L’immagazzinamento del Drive per più di due anni potrebbe danneggiare la capacità di funzionamento dei condensatori del DC link che dovranno perciò essere “ripristinati”: prima della messa in servizio di apparecchi rimasti in
magazzino per un così lungo periodo si consiglia un’alimentazione di almeno due ore senza carico al fine di rigenerare i condensatori (la tensione d’ingresso deve essere applicata senza abilitare il Drive).
3.1 Generalità
Gli inverter ADL vengono imballati con cura per una spedizione corretta.
Il trasporto deve essere effettuato con mezzi adeguati (vedere indicazioni di peso). Fare attenzione alle indicazioni
stampate sull’imballo.
Ciò vale anche per gli apparecchi disimballati per essere inseriti in quadri di comando.
Verificare subito al momento della fornitura:
- che l’imballo non abbia subito danni visibili,
-
che i dati della bolla di consegna corrispondano all’ordine fatto.
Effettuare con attenzione le operazioni di apertura degli imballaggi ed assicurarsi che:
- durante le operazioni di trasporto nessuna parte dell’apparecchio sia stata danneggiata,
-
l’apparecchio corrisponda al tipo effettivamente ordinato,
In caso di danneggiamenti oppure di fornitura incompleta o errata, segnalare la cosa direttamente all’ufficio commerciale competente.
L’immagazzinaggio deve essere fatto solamente in luoghi asciutti e nei limiti di temperatura specificati.
Nota! Le variazioni di temperatura possono causare la formazione di condense di umidità nell’apparecchio, che sono accettabili in determinate condizioni non sono
tuttavia consentite durante il funzionamento dell’apparecchio.
Bisogna pertanto in ogni caso accertarsi che l’apparecchio al quale viene applicata tensione, non presenti alcuna condensa!
3.2 Condizioni ambientali ammesse
Temperatura:
immagazzinaggio������������������������� -25…+55°C (-13…+131°F), classe 1K4 per EN50178
-20…+55°C (-4…+131°F), per dispositivi con tastierino
trasporto������������������������������� -25…+70°C (-13…+158°F), classe 2K3 per EN50178
-20…+60°C (-4…+140°F), per dispositivi con tastierino
Umidità dell’aria:
immagazzinaggio������������������������� 5% a 95 %, 1 g/m3 a 29 g/m3 (Classe 1K3 secondo EN50178)
trasporto������������������������������� 95 % (3), 60 g/m3 (4)
Una leggera umidità (o condensa) può generarsi occasionalmente per un breve periodo se il dispositivo non è in funzione (classe 2K3 come per EN50178)
Pressione atmosferica:
immagazzinaggio������������������������� [kPa] 86 a 106 (classe 1K4 secondo EN50178)
trasporto������������������������������� [kPa] 70 a 106 (classe 2K3 secondo EN50178)
(3) Valori superiori di umidità dell’aria relativa generati con la temperatura a 40°C (104°F) oppure se la temperatura del Drive subisce improvvisamente una variazione
da -25 ...+30°C (-13°...+86°F).
(4) Valori superiori di umidità dell’aria se il Drive subisce improvvisamente una variazione da 70...15°C (158°...59°F).
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
13
4 - Specifiche
4.1 Condizioni ambientali
Ambiente di installazione���������������� Grado di inquinamento 2 o inferiori (libero da raggi di sole diretti, vibrazioni, polveri, gas
corrosivi o infiammabili, nebbia, oli vaporosi e goccioli d’acqua; evitare ambienti ad alto
tasso di salsedine)
Altitudine di installazione���������������� Max 2000 m sopra il livello del mare. Con riduzione della corrente d’uscita dell’1,2 % per
ogni 100 m a partire da 1000 m.
Condizioni meccaniche di installazione������� Stress di vibrazioni: EN 60721-3-3 Classe 3M1
Temperatura di funzionamento ���������� -10…+45°C (32°…113°F)
Temperatura di funzionamento ���������� +45 ... +50°C (+113 … +122°F) con declassamento dell’ 1% per ogni °C a partire da
45°C e fino a 50°C. Non è ammesso il funzionamento con temperatura > 50°C
Umidità aria (funzionamento)������������� da 5 % a 85 % e da 1 g/m3 a 25 g/m3 senza umidità (o condensa)
Pressione aria (funzionamento) [kPa]������ da 70 a 106
4.2 Normative
Condizioni climatiche������������������� EN 60721-3-3
Sicurezza elettrica��������������������� EN 50178, EN 61800-5-1, UL508C, UL840 grado di inquinamento 2
Vibrazioni���������������������������� Classe 3M1 EN 60721-3-3
Compatibilità EMC��������������������� EN 12015 (serie ADL130 con filtro esterno opzionale) Grado di protezione �������������������� IP20
Certificazioni �������������������������
,
4.3 Precisione
4.3.1 Controllo di velocità
Precisione regolazione di velocità����������� Vettoriale flusso CL con retroazione e brushless : 0,01 % Velocità nominale motore
Vettoriale flusso OL ad anello aperto : ± 30 % Scorrimento nom. motore
Controllo SSC: ± 60 % Scorrimento nom. motore
4.3.2 Limiti di controllo di velocità
Range di velocità (*) �������������������� ± 32000 rpm
Formato velocità (*)��������������������� 32 bit
Range di frequenza ��������������������� ± 2000 Hz
Frequenza max ������������������������ Vettoriale flusso CL con retroazione e brushless: 300Hz, FVOL : 150 Hz, VF : 600 Hz
Frequenza min ������������������������ 0 Hz
(*) riferito a Fondo scala velocità, PAR:680.
4.3.3 Controllo di coppia
Risoluzione della coppia (*) ��������������� > 0,1 %
Precisione regolazione di coppia (*) ��������� Vettoriale flusso CL con retroazione : ± 5%
Controllo diretto di coppia ���������������� si
Limitazione di corrente������������������� Limiti ±, Limiti mot/gen, Limiti variabili
(*) riferito alla coppia nominale
4.3.4 Prestazioni di corrente
Sovraccarico�������������������������� 200% (taglie 4 e 5=180%) *10 sec con frequenza d’uscita superiore a 3 Hz
150% con frequenza d’uscita inferiore a 3 Hz.
Frequenza di commutazione��������������� 10 kHz
14
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
4.4 Dati elettrici in ingresso
Induttanza���������������������������� taglie 1..3: opzionale (DC o AC), taglie 4-5: integrata (DC)
Taglia
Tensione di
ingresso Uln
Frequenza di
ingresso
(Vac)
(Hz)
Soglia di
Sovratensione
(Overvoltage)
(Vcc)
Soglia di
Sottotensione
(Undervoltage)
(Vcc)
Corrente efficace in ingresso In (@ In out)
Capacità
DC-Link
@@ 230 Vca (A)
@ 400 Vca (A)
@ 480 Vca (A))
(µF)
1040
12
11
10
470
1055
17
16
15
680
2075
23
22
20
680
31
29
26
1020
42
40
37
1500
50
47
45
2250
55
53
50
2700
55
55
49
2350
72
72
65
2350
89
89
81
2350
97
97
89
4700
136
136
122
5600
ADL200-... , 3ph
2110
3150
3185
3220
@ 480 Vca =
470 Vcc;
rete trifase
230 - 400
- 480 Vca
-15%+10%
50/60 Hz,
± 5%
820 Vcc
@ 460 Vca =
450 Vcc
@ 400 Vca =
391 Vcc;
4300
4370
@ 230 Vca =
225 Vcc
4450
5550
5750
ADL130-..., 1ph
1011
1015
2022
2030
3040
3055
Rete monofase
200 Vca
-10%+10%
50/60 Hz,
± 2%
16
-
-
2200
@ 200 Vca =
196 Vcc;
18
-
-
2200
24
-
-
4050
@ 230 Vca =
225 Vcc
31
-
-
4050
35
-
-
4950
50
-
-
4950
410 Vcc
230 Vca
-15%+10%
4.5 Dati elettrici in uscita
Tensione massima di uscita U2 ������������ 0,98 x Uln Frequenza massima di uscita f2������������ 300 Hz
Taglia
In Corrente di uscita nominale
(fsw = default)
(Uln = Tensione di ingresso AC)
Pn mot
(Potenza motore raccomandata, fsw =
default)
Fattore di riduzione
@Uln =
230Vca
@Uln =
400Vca
@Uln =
460Vca
@Uln =
230Vca
@Uln =
400Vca
@Uln =
460Vca
Kv
Kalt
(A)
(A)
(A)
(kW)
(kW)
(Hp)
(1)
(2)
Unita`di
frenatura a
IGBT
ADL200-... , 3ph
1040
9
9
8,1
2
4
5
0,95
1,2
1055
13,5
13,5
12,2
3
5,5
7,5
0,95
1,2
2075
18,5
18,5
16,7
4
7,5
10
0,95
1,2
2110
24,5
24,5
22
5,5
11
15
0,95
1,2
3150
32
32
28,8
7,5
15
20
0,95
1,2
3185
39
39
35,1
9
18,5
25
0,95
1,2
3220
45
45
40,5
11
22
30
0,95
1,2
4300
60
60
54
15
30
40
0,95
1,2
4370
75
75
67,5
18,5
37
50
0,95
1,2
4450
90
90
81
22,0
45
60
0,95
1,2
5550
105
105
94
30
55
75
0,95
1,2
5750
150
150
135
37
75
100
0,95
1,2
1011
6
-
-
1,1
-
-
0,95
1,2
1015
6,8
-
-
1,5
-
-
0,95
1,2
2022
9,6
-
-
2,2
-
-
0,95
1,2
2030
13
-
-
3
-
-
0,95
1,2
3040
15
-
-
4
-
-
0,95
1,2
3055
22
-
-
5,5
-
-
0,95
1,2
Interna
standard
(con
resistenza
esterna);
coppia di
frenatura 150
% MAX
Esterna
opzionale
ADL130-..., 1ph
Interna
standard
(con
resistenza
esterna);
coppia di
frenatura 150
% MAX
(1) Kt : Fattore di declassamento per temperatura ambiente di 50°C (1 % ogni °C superiore a 45°C)
(2) Kalt : Fattore di declassamento per installazione ad altitudini superiori a 1000 metri s.l.m.. Valore da applicare = 1.2 % ad ogni 100 m di incremento oltre i 1000 m.
Es: Altitudine 2000 m, Kalt = 1,2 % * 10 = 12% di declassamento; In declassata = (100 - 12) % = 88 % In
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
15
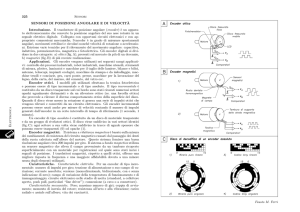
4.5.1 Declassamento delle prestazioni in regime di sovraccarico
La corrente di uscita in regime di sovraccarico è subordinata al valore della frequenza di uscita, secondo quanto indicato nella seguente figura.
Figura 4.5.1: Legame sovraccarico / frequenza di uscita
Sizes 1...3 (4...22kW)
OL (% IN)
OL (% IN)
Sizes 4-5 (30...75kW)
200
180
150
150
F out (Hz)
3
3
F out (Hz)
4.5.2 Declassamento della frequenza di switching
La frequenza di switching viene modificata in relazione alla temperatura del Drive (rilevata sul dissipatore), secondo
quanto indicato nella seguente figura.
Figura 4.5.2: Legame frequenza di switching / temperatura dissipatore
FSW (kHz)
10
5
T diss th
T diss (°C)
4.5.3 Kalt: Fattore di riduzione per temperatura ambiente
Figura 4.5.3: Coefficiente di riduzione per Tamb
KT
1.00
0.95
Funzionamento non permesso
Intervallo di temperature ambiente permesse
-10
45
50
T amb (°C)
4.6 Livello di tensione dell’inverter per operazioni di sicurezza
Il tempo minimo che deve trascorrere da quando un inverter ADL viene disabilitato dalla rete, prima che un operatore
possa agire sulle parti interne dell’inverter evitando scosse elettriche, è di 5 minuti.
Importante!
16
Il valore prende in considerazione lo spegnimento di un inverter alimentato a 460Vca +10%, senza nessuna opzione (tempo indicato per
condizione di inverter disabilitato).
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
4.7 Consumi a vuoto (Classificazione energetica)
Taglia
N° di Pre-cariche
consentite
Tempo di
Accensione
[sec]
Consumo in Standby
"Ventilatore Spento"
[W]
Consumo ventole
[W]
Consumo in Standby
"Ventilatore Acceso"
[W]
ADL200-... , 3ph
1040
1 ogni 20 sec.
5 circa
20
4
24
1055
1 ogni 20 sec.
5 circa
20
10
30
2075
1 ogni 20 sec.
5 circa
20
10
30
2110
1 ogni 20 sec.
5 circa
20
8
28
3150
1 ogni 20 sec.
5 circa
20
16
36
3185
1 ogni 20 sec.
5 circa
20
15
35
3220
1 ogni 20 sec.
5 circa
20
15
35
4300
1 ogni 20 sec.
5 circa
25
25
45
4370
1 ogni 20 sec.
5 circa
25
36
56
4450
1 ogni 20 sec.
5 circa
25
36
56
5550
1 ogni 20 sec.
5 circa
25
34
59
5750
1 ogni 20 sec.
5 circa
25
72
97
1011
1 ogni 20 sec.
5 circa
20
4
24
1015
1 ogni 20 sec.
5 circa
20
10
30
2022
1 ogni 20 sec.
5 circa
20
10
30
2030
1 ogni 20 sec.
5 circa
20
8
28
3040
1 ogni 20 sec.
5 circa
20
16
36
3055
1 ogni 20 sec.
5 circa
20
15
35
ADL130-..., 1ph
4.8 Ventilazione
Tutti gli inverter sono equipaggiati con ventilatori interni.
Taglia
Pv
(dissipazione del calore) (*)
Portata ventilatori
@Uln=230..460Vca (W)
Dissipatore (m3/h)
1040
150
1055
2075
Apertura minima consigliata
per la ventilazione
Interno (m3/h)
(cm2)
35
-
72
250
2 x 58
-
144
350
2 x 58
-
144
2110
400
2 x 35
-
144
3150
600
2 x 98
32
328
3185
700
2 x 98
32
328
3220
900
2 x 104
32
328
4300
1200
2 x 98
2 x 64
512
4370
1400
2 x 190
2 x 64
595
4450
1700
2 x 190
2 x 64
595
5550
2100
2 x 285
170
864
5750
2900
2 x 285
2 x 170
1152
ADL200-... , 3ph
ADL130-..., 1ph
1011
70
32
-
72
1015
80
32
-
144
2022
130
2 x 32
-
144
2030
170
2 x 32
-
144
3040
200
1 x 80
32
328
3055
290
1 x 80
32
328
(*) : valori riferiti alla frequenza di switching in condizioni di default
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
17
4.9 Dimensioni e pesi
27 (1.06”)
115 (4.53”)
158.67 (6.25”)
318.5 (12.54”)
367.6 (14.47”)
131.5 (5.18”)
331.1 (13.04”)
13.1 (.52”)
mm (inches)
159.2 (6.27”)
135 (5.31”)
115 (4.53”)
Figura 4.9.1: Dimensioni taglia 1
159.2 (6.27”)
131.2 (5.17”)
27 (1.06”)
115 (4.53”)
369.5 (14.55”)
382.05 (15.04”)
158.67 (6.25”)
418.8 (16.49”)
mm (inches)
135 (5.31”)
Figura 4.9.2: Dimensioni taglia 2
18
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
115 (4.53”)
227.8 (8.97”)
27 (1.06”)
168 (6.61”)
178 (7.01”)
374.5 (14.74”)
387 (15.24”)
448.4 (17.65”)
13
151.2 (5.95”)
164 (6.46”)
165 (6.5”)
Figura 4.9.3: Dimensioni taglia 3
250 (9.84”)
27 (1.06”)
220 (8.66”)
594.9 (23.42”)
612 (24.09”)
276 (10.87”)
682 (26.85”)
17.6 (0.69”)
268 (10.55”)
254 (10”)
Figura 4.9.4: Dimensioni taglia 4
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
19
305 (12.01”)
27
(1.06”)
30 (1.18”) 190 (7.48”) 38.5 (1.52”)
331 (13.03”)
747.5 (29.43”)
767 (30.2”)
311 (12.0”)
265 (10.43”)
Figura 4.9.5: Dimensioni taglia 5
Taglia
Peso (kg)
Peso (lbs)
ADL200-... , 3ph
1040 - 1055
5,8
2075 - 2110
7,8
12,8
17,2
3150 ... 3220
10,5
23,15
4300 ... 4450
32
70,6
5550 ... 5750
60
132,3
ADL130-..., 1ph
1011 - 1015
5,8
2022 - 2030
7,8
17,2
3040 ... 3055
10,5
23,15
Nota !Pesi riferiti a Drive standard senza tastierino, senza opzioni, imballo non incluso.
20
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
12,8
5 - Opzioni
5.1 Fusibili esterni opzionali
5.1.1 Fusibili lato rete (F1)
Prevedere la protezione a monte dell’inverter sul lato rete.
Utilizzare esclusivamente fusibili extrarapidi.
F1 - Fusibili esterni lato rete
Taglia
EUROPA
Ore di vita condensatori
DC link [h]
Tipo
AMERICA
Codice
Tipo
Codice
ADL200-... , 3ph
1040
> 15000
GRD2/20
F4D15
A70P20
S7G48
1055
> 15000
GRD2/25
F4D16
A70P25
S7G51
2075
> 15000
GRD3/35
F4D20
A70P40
S7G52
2110
> 15000
Z22GR40
F4M16
A70P40
S7G52
3150
> 15000
Z22GR63
F4M17
A70P60-4
S7I34
3185
> 15000
Z22GR80
F4M19
A70P80
S7G54
3220
> 15000
Z22GR80
F4M19
A70P80
S7G54
4300
> 15000
Z22GR80
F4M19
A70P80
S7G54
4370
> 15000
Z22GR100
F4M21
A70P100
S849B
4450
> 15000
Z22GR100
F4M21
A70P100
S849B
5550
> 15000
S00/üf1/80/200A/690V
F4G23
A70P200
S7G58
5750
> 15000
S00/üf1/80/200A/690V
F4G23
A70P200
S7G58
ADL130-..., 1ph
1011
> 15000
GRD2/25
F4D16
A70P25
S7G51
1015
> 15000
GRD2/25
F4D16
A70P25
S7G51
2022
> 15000
GRD3/35
F4D20
A70P40
S7G52
2030
> 15000
Z22GR40
F4M16
A70P40
S7G52
3040
> 15000
Z22GR63
F4M17
A70P60-4
S7I34
3055
> 15000
Z22GR80
F4M19
A70P80
S7G54
I dati tecnici dei fusibili come ad esempio dimensioni, pesi, potenze dissipate, portafusibili ecc. si possono rilevare dai relativi cataloghi del costruttore:
GRD... (E27), S00... Jean Müller, Eltville
A70...
Ferraz
5.2 Induttanze di ingresso
L’induttore trifase di rete è fortemente consigliato per:
- limitare la corrente RMS in ingresso dell’inverter serie ADL.
- per aumentare la vita dei condensatori del circuito intermedio e l’affidabilità dei diodi di ingresso.
- per diminuire la distorsione armonica di rete
- per ridurre i problemi causati dall’alimentazione tramite una linea a bassa impedenza (≤ 1%).
5.2.1 Induttanze d’ingresso AC
Taglia
THD (%)
In
(@400V/50Hz, con Induttanza AC)
(A)
Modello
Codice
S7AAG
ADL200-... , 3ph
1040
9
LR3y-2040
1055
13,5
LR3y-2055
S7AB5
2075
18
LR3y-2075
S7AB6
2110
24
LR3y-3110
S7AB7
32
LR3y-3150
S7AB8
3185
39
LR3-022
S7FF4
3220
44,5
LR3-022
S7FF4
53
LR3-030
S7FF3
70
LR3-037
S7FF2
85
LR3-055
S7FF1
93
LR3-090
S7D19
130
LR3-090
S7D19
< 70 %
3150
4300
4370
< 34 %
4450
5550
5750
< 35 %
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
21
Note ! Per le dimensioni e i pesi delle induttanze vedere il catalogo LIFT di Gefran (1S9I07).
5.2.2 Induttanze d’ingresso DC
Taglia
In
(@400V/50Hz, con Induttanza DC)
(A)
THD (%)
Modello
Codice
ADL200-... , 3ph
1040
8
LDC-004
S7AI10
1055
12
LDC-005
S7AI11
16
LDC-007
S7AI12
2075
2110
< 35 % (EN 12015)
21
LDC-011
S7AI13
3150
28
LDC-015
S7AI14
3185
35
LDC-022
S7AI15
3220
40
LDC-022
S7AI15
4300
40
4370
41
4450
46
5550
45
5750
38
Induttanza interna
Note ! Per le dimensioni e i pesi delle induttanze vedere il catalogo LIFT di Gefran (1S9I07).
5.3 Induttanze d’uscita AC
L’inverter ADL200 può essere utilizzato con motori standard oppure con motori progettati appositamente per essere
utilizzati con gli inverter.
Questi ultimi possiedono solitamente un’isolamento maggiore per meglio sostenere la tensione PWM. Si fornisce di seguito esempi di normativa di riferimento: i motori progettati per essere utilizzati con inverter non richiedono nessun fltro
speciale in uscita a questi. I motori standard, in particolare con cavi lunghi (solitamente superiori ai 100 metri) possono
richiedere un’induttore d’uscita per mantenere la forma d’onda di tensione entro i limiti specifcati.
La gamma di induttori consigliati sono elencati nella tabella seguente. La corrente nominale degli induttori dovrebbe
essere approssimativamente maggiore del 20% rispetto a quella dell’inverter per tenere in considerazione perdite aggiuntive causate dalla modulazione della forma d’onda d’uscita.
Taglia
Modello
Codice
1040
LU3-005
S7FG3
1055
LU3-005
S7FG3
2075
LU3-011
S7FG4
2110
LU3-011
S7FG4
3150
LU3-015
S7FM2
3185
LU3-022
S7FH3
3220
LU3-022
S7FH3
4300
LU3-030
S7FH4
4370
LU3-037
S7FH5
4450
LU3-055
S7FH6
5550
LU3-055
S7FH6
5750
LU3-090
S7FI0
ADL200-... , 3ph
Note ! Con corrente nominale dell’inverter e frequenza 50 Hz, gli induttori di uscita provocano una caduta della tensione di uscita del 2% c.ca .
Per le dimensioni e i pesi delle induttanze vedere il catalogo LIFT di Gefran (cod. 1S9I07).
22
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
5.4 Resistenza di frenatura esterne (opzionali)
Abbinamenti consigliati per l’impiego con unità di frenatura interna.
Tabella 5.4.1: Abbinamento consigliato serie ADL..-AC e ADL...-BR
Lista e dati tecnici delle resistenze esterne normalizzate
Taglia
Resistenza tipo
Codice
Q.tà
Sovraccarico max, 1”servizio 10%
Sovraccarico max,
30”- servizio 25%
Pnbr
Rbr
Ebr (kJ)
Ebr (kJ)
(W)
(Ω)
Alloggiamento
ADL200-... , 3ph
1040
RFPD 750 DT 100R
S8SY4
1
7,5
38
750
100
IP44
1055
RFPR 750 D 68R
S8SZ3
1
7,5
38
750
68
IP44
2075
RFPR 750 D 68R
S8SZ3
1
7,5
28
750
68
IP44
2110
RFPR 1200 D 49R
S8SZ4
1
7,5
28
1200
49
IP44
3150
RFPR 1900 D 28R
S8SZ5
1
12
43
1900
28
IP44
3185
BRT4K0-15R4
S8T00G
1
40
150
4000
15,4
IP20
3220
BRT4K0-15R4
S8T00G
1
40
150
4000
15,4
IP20
4300
BRT4K0-11R6
S8T00H
1
40
150
4000
11,6
IP20
4370
BRT4K0-11R6
S8T00H
1
40
150
4000
11,6
IP20
4450
BRT8K0-7R7
S8T00I
1
40
150
8000
7,7
IP20
5550
BRT8K0-7R7
S8T00I
1
40
150
8000
7,7
IP20
5750
Unità di frenatura esterna (serie BUy, opzionale)
ADL130-..., 1ph
1011
RF 220 T 100R
S8T0CE
1
1,5
11
200
100
IP44
1015
RF 220 T 68R
S8T00T
1
1,5
11
200
68
IP44
2022
RF 300 D 34R
S8T0CH
1
2,5
24
300
34
IP44
2030
RF 300 D 34R
S8T0CH
1
2,5
24
300
34
IP44
3040
RFPD 750 DT 26R
S8T0CZ
1
4,5
43
750
26
IP44
3055
RFPD 750 DT 26R
S8T0CZ
1
4,5
43
750
26
IP44
Pnbr
Potenza nominale del resistore di frenatura
Rbr
Valore ohmico del resistore di frenatura
Ebr
Massima energia dissipabile sul resistore
I resistori di frenatura possono essere soggetti a sovraccarichi non previsti a seguito di guasti.
Avvertenza!
E’ assolutamente necessario proteggere i resistori mediante l’utilizzo di dispositivi di protezione termica.Questi dispositivi non devono interrompere il circuito in cui e’ inserito il resistore, ma il loro contatto ausiliario deve interrompere
l’alimentazione della parte di potenza del Drive. Nel caso in cui il resistore preveda un contatto di protezione, questo
deve essere utilizzato unitamente a quello del dispositivo di protezione termica.
Nota ! Per le dimensioni e i pesi delle resistenze vedere il catalogo LIFT di Gefran (cod. 1S9I07).
5.5 Filtri EMC (opzionali)
Taglia
Tipo
Codice
Conducted emissions according to
EN 12015
Category / Motor cable length
ADL200-... , 3ph
La serie ADL200 è equipaggiata con un filtro EMC interno
EN12015 - C2 / 10m
ADL130-..., 1ph
Nota ! 1011
EMI-FN2410-230-25
S7EMI1
1015
EMI-FN2410-230-25
S7EMI1
2022
EMI-FN2410-230-32
S7EMI2
2030
EMI-FN2410-230-32
S7EMI2
3040
EMI-FN2410-230-45
S7EMI3
3055
EMI-FN2410-230-60
S7EMI4
EN12015 - C2 / 10m
Per le dimensioni e i pesi vedere il catalogo LIFT di Gefran (cod. 1S9I07).
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
23
6 - Installazione meccanica
Il Drive deve essere fissato su una parete costruita con materiali resistenti al calore. Durante il funzionamento, la
temperatura del contenitore del Drive può raggiungere i 70°C (158°F).
Attenzione!
Non installare il Drive in ambienti dove la temperatura eccede quella ammessa dalle specifiche: la temperatura ambiente ha un grande effetto sulla vita e sull’affidabilità del Drive.
Assicurarsi di rimuovere il (i) pacchetto (i) di deessiccante durante il disimballaggio del prodotto (se non vengono
rimossi questi pacchetti potrebbero posizionarsi nelle ventole o ostruire le aperture di raffreddamento causando un
sovrariscaldamento del Drive).
Proteggere l’apparecchio da sollecitazioni ambientali non consentite (temperatura, umidità, colpi, ecc.)
6.1 Massima inclinazione e distanze di montaggio
Gli inverter devono essere sistemati in modo da garantire attorno ad essi la libera circolazione dell’aria, vedere il paragrafo 4.8 Ventilazione.
Inclinazione massima ammissibile ���������� 30° (riferita alla posizione verticale)
Distanza minima superiore ed inferiore������� 150 mm
Spazio libero frontale minimo�������������� 25 mm
Distanza minima tra i Drive���������������� 25 mm
Distanza minima laterale con l’armadio������� 25 mm
150 mm ( 6" )
25 mm ( 0.98” )
10 mm ( 0.4" )
150 mm ( 6" )
25 mm ( 0.98” )
24
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
25 mm ( 0.98” )
6.2 Quote di fissaggio
227.8 (8.97”)
Fissaggio a muro • Wall mounting
Fixation mural • Wandmontagee
Fijación en pared
159.2 (6.3”)
115 (4.5”)
168 (6.61”)
A
A
159.2 (6.3”)
13.1 (0.5”)
115 (4.5”)
Taglia 1
Size 1
Grandeur 1
Größe 1
Tamaño 1
B
B
318.5 (12.5”)
Taglia 2
Size 2
Grandeur 2
Größe 2
Tamaño 2
331.1 (14”)
Taglia 3
Size 3
Grandeur 3
Größe 3
Tamaño 3
367.6 (14.5”)
369.5 (14.5”)
382.05 (15”)
418.8 (16.5”)
374.5 (14.74”)
387 (15.24”)
448.4 (17.65”)
A
B
115 (4.5”)
115 (4.5”)
135 (5.3”)
135 (5.3”)
164 (6.46”)
38.5 (1.52”)
682 (26.85”)
730.4 (28.76")
767 (30.2”)
Taglia 5
Size 5
Grandeur 5
Größe 5
Tamaño 5
A
594.9 (23.42”)
17.6 (0.69”)
A
Fissaggio a muro
Wall mounting
Fixation murale
Wandmontage
Fijación en pared
220 (8.66”)
17.6 (0.69”)
190 (7.48”)
30 (1.18”)
Taglia 4
Size 4
Grandeur 4
Größe 4
Tamaño 4
B
265 (10.43”)
B
254 (10”)
Taglie • Sizes • Grandeurs • Größen • Tamaños : 1-2-3
Taglie • Sizes • Grandeurs • Größen • Tamaños 4-5
5 [0
(A)
5.5 [0.21”]
10.75 [0.42”]
17 [0.7”]
1.
Ø1
(B)
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
6.5 [0.26”]
19 [0.75”]
6.5 [0.26”]
.45”]
(A)
12 [0.47”]
Ø 13 [0.51”]
5.5 [0.21”]
(B)
25
Viti consigliate per il fissaggio
Taglia 1 (ADL...-1...)
n. 4 viti M5 x 12 mm + Rondella grover + Rondella piana
Taglia 2 (ADL...-2...)
n. 4 viti M5 x 12 mm + Rondella grover + Rondella piana
Taglia 3 (ADL...-3...)
n. 4 viti M5 x 12 mm + Rondella grover + Rondella piana
Taglia 4 (ADL...-4...)
n. 4 viti M6 x 16 mm + Rondella grover + Rondella piana
Taglia 5 (ADL...-5...)
n. 5 viti M6 x 16 mm + Rondella grover + Rondella piana
Nota!Altre dimensioni vedere il capitolo 4.9 Dimensioni e pesi.
26
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
7 - Collegamento elettrico
I Drive a frequenza variabile sono apparecchiature elettriche per l’impiego in installazioni industriali. Parti del Drive
sono in tensione durante il funzionamento.
Avvertenza!
L’installazione elettrica e l’apertura del dispositivo possono essere eseguiti solo da personale qualificato. Installazioni non corrette di motori oppure Drive possono danneggiare il dispositivo ed essere causa di ferimenti o danni
materiali.
Oltre alla logica di protezione controllata dal software, il Drive non dispone di altra protezione contro la sovravelocità.
Fare riferimento alle istruzioni elencate in questo manuale ed osservare le normative di sicurezza locali e nazionali.
Riposizionare tutti i coperchi prima di applicare tensione al dispositivo. La non osservanza di questa avvertenza può
essere causa di morte o seri danni alla persona.
Il Drive deve essere sempre collegato alla messa a terra. Se il Drive non è collegato correttamente alla messa a terra si
possono generare condizioni estremamente pericolose che possono essere causa di morte o seri danni alla persona.
Avvertenza!
Non aprire il dispositivo oppure i coperchi mentre la rete è alimentata. Il tempo di attesa minimo prima di poter agire
sui morsetti oppure all’interno del dispositivo è indicato nel capitolo 4.6.
Non toccare o danneggiare alcun componente durante l’utilizzo del dispositivo. Non è ammesso alterare le distanze
di isolamento oppure la rimozione dell’isolamento e dei coperchi.
Non collegare tensioni d’alimentazione che eccedano il campo di tensione ammesso. Se vengono applicate tensioni
eccessive al Drive, i suoi componenti interni ne verranno danneggiati.
Attenzione!
Funzionamento con dispositivo a corrente residua (Interruttore differenziale)
Se si è installato un RCD (anche detto RCCB o ELCB), tale dispositivo deve essere ad alta corrente dispersa (≥ 300
mA).
RCD: Residual Current Device
RCCB: Residual Current Circuit Breaker
ELCB: Earth Leakage Circuit Breaker
Nota: Gli RCD utilizzati devono fornire protezione dalle componenti a corrente continua presenti nella corrente di guasto e devono essere idonei a sopprimere in
breve tempo picchi di corrente. Si raccomanda di proteggere l’inverter separatamente mediante fusibili.
Osservare le normative dei singoli paesi (ad esempio, le norme VDR in Germania) e degli enti locali fornitori di energia elettrica.
Attenzione!
Non è consentito il funzionamento del Drive senza il collegamento di messa a terra. Per evitare disturbi, la carcassa
del motore deve essere messa a terra attraverso un connettore di terra separato dai connettori di terra delle altre
apparecchiature.
La connessione di messa a terra deve essere dimensionata in accordo alle normative elettriche nazionali oppure al
Codice Elettrico Canadese. La connessione deve essere eseguita tramite un connettore ad anello chiuso certificato
dalle normative UL e CSA che dovrà essere dimensionato in base al calibro per fili metallici utilizzato. Il connettore
deve essere fissato utilizzando la pinza specificata dal produttore del connettore stesso.
Non eseguire la prova di isolamento tra i morsetti del Drive oppure tra i morsetti del circuito di controllo.
Non può essere applicata tensione all’uscita del Drive (morsetti U2, V2, W2). Non è consentito inserire in parallelo
sull’uscita più Drive e non è ammesso il collegamento diretto degli ingressi e delle uscite (bypass).
La messa in servizio elettrica deve essere effettuata da personale qualificato. Questo è responsabile del fatto che
esista un adeguato collegamento di terra ed una protezione dei cavi di alimentazione secondo le prescrizioni locali e
nazionali. Il motore deve essere protetto contro il sovraccarico.
L’immagazzinamento del Drive per più di due anni potrebbe danneggiare la capacità di funzionamento dei condensatori del DC link che dovranno perciò essere “ripristinati”.
Prima della messa in servizio di apparecchi rimasti in magazzino per un così lungo periodo si consiglia un’alimentazione di almeno due ore senza carico al fine di rigenerare i condensatori (la tensione d’ingresso deve essere applicata senza abilitare il Drive).
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
27
7.1 Parte di potenza
7.1.1 Sezione dei cavi
Morsetti: L1 - L2 - L3 - BR - C1 - C - D - U - V - W - EM
Taglia
Massima sezione dei cavi
(conduttore flessibile)
ADL200-... , 3ph
Spelatura
consigliata
Capocorda
consigliato
Coppia di
serraggio (min)
(mm2)
AWG
(mm)
(mm)
(Nm)
1040
4
10
10
Nessuno / puntale
0,7 ... 0,8
1055
4
10
10
Nessuno / puntale
0,7 ... 0,8
2075
6
8
10
Nessuno / puntale
0,7 ... 0,8
2110
6
8
10
Nessuno / puntale
0,7 ... 0,8
3150
16
6
14
Nessuno / puntale
1,7 ... 1,8
3185
16
6
14
Nessuno / puntale
1,7 ... 1,8
3220
16
6
14
Nessuno / puntale
1,7 ... 1,8
4300
35
2
18
Nessuno / puntale
2,4 ... 4,5
4370
35
2
18
Nessuno / puntale
2,4 ... 4,5
4450
35
2
18
Nessuno / puntale
2,4 ... 4,5
5550
95
(BR1/BR2=50)
4/0
(BR1/BR2=1/0)
23
(BR1/BR2=27)
Nessuno / puntale
14
(BR1/BR2=10)
5750
95
4/0
23
Nessuno / puntale
14
Morsetti: L1 - L2 - L3 - BR1 - BR2 - C - D - U - V - W
Morsetto: EM
4300
6
10
10
Nessuno / puntale
0,7 ... 0,8
4370
6
10
10
Nessuno / puntale
0,7 ... 0,8
4450
6
10
10
Nessuno / puntale
0,7 ... 0,8
5550
6
10
10
Nessuno / puntale
0,7 ... 0,8
5750
6
10
10
Nessuno / puntale
0,7 ... 0,8
Nota! La morsettiera di potenza è di tipo estraibile per le taglie 1040 ... 3220, morsetto EM di tipo estraibile su tutte le taglie meccaniche.
Morsetti:
Taglia
Sezione del cavo
ADL200-... , 3ph
(mm2)
1040 ... 3220
4300
sulla carpenteria
Diametro vite di
fissaggio
Capocorda
consigliato
Coppia di serraggio
(min)
(mm)
(mm)
(Nm)
M5
Occhiello-Forcella
6
AWG
Uguale alla sezione massima impiegata per la
morsettiera di potenza
16
6
M6
Occhiello-Forcella
10
4370
16
6
M6
Occhiello-Forcella
10
4450
16
6
M6
Occhiello-Forcella
10
5550
50
1/0
M6
Occhiello-Forcella
10
5750
50
1/0
M6
Occhiello-Forcella
10
Morsetti: L1 - N - BR - C1 - C - D - U2/T1 - V2/T2 - W2/T3 - EM
Taglia
Massima sezione dei cavi
(conduttore flessibile)
ADL130-... , 1ph
Spelatura
consigliata
Coppia di
serraggio (min)
(mm2)
AWG
(mm)
(mm)
(Nm)
1011
4
10
10
Nessuno / puntale
0,5 ... 0,6
1015
4
10
10
Nessuno / puntale
0,5 ... 0,6
2022
6
8
10
Nessuno / puntale
1,2 ... 1,5
2030
6
8
10
Nessuno / puntale
1,2 ... 1,5
3040
16
6
14
Nessuno / puntale
1,5 ... 1,7
3055
16
6
14
Nessuno / puntale
1,5 ... 1,7
Diametro vite di
fissaggio
Capocorda
consigliato
Coppia di serraggio
(min)
(mm)
(mm)
(Nm)
M5
Occhiello-Forcella
6
Morsetti:
Taglia
Sezione del cavo
ADL130-... , 1ph
(mm2)
1011 ... 3055
28
Capocorda
consigliato
AWG
Uguale alla sezione massima impiegata per la
morsettiera di potenza
sulla carpenteria
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
Nota! La sezione minima per entrambe le connessioni di massa previste deve essere conforme alle prescrizioni della norma EN61800-5-1. Connettere sempre a
massa entrambi i punti previsti sulla carpenteria.
7.1.2 Collegamento schermatura (consigliato)
B
B
C
A
Allentare le due viti (B), posizionare il supporto metallico (A) (opzionale, POWER SHIELD KIT) e riavvitare a fondo.
Fissare lo schermo dei cavi di potenza agli omega (C) come indicato nella figura.
• Taglie 4 e 5 : In queste taglie non è previsto il supporto metallico (A), la schermatura dei cavi deve essere realizzata a
cura dell'installatore.
7.1.3 Linee guida per la Compatibilità Elettromagnetica (EMC)
Importante!
I Drive sono progettati per funzionare in un ambiente industriale nel quale, ai fini dell'immunità, è previsto un livello
elevato di interferenze elettromagnetiche. Procedure di installazione adeguate garantiscono un funzionamento sicuro
e senza problemi. Qualora si verificassero problemi, seguire le seguenti linee guida.
- Verificare che tutti gli apparecchi nell’armadio siano adeguatamente messi a terra mediante cavi corti e di sezione
elevata, collegati a stella o a una barra. La soluzione migliore consiste nell’utilizzare un piano di montaggio conduttivo quale piano di riferimento per la messa a terra EMC.
- Per messa a terra EMC, i conduttori a piattina sono migliori di altri tipi in quanto hanno un’impedenza inferiore a
frequenze superiori.
- Verificare che tutti gli apparecchi di controllo (quali un PLC) collegati all’inverter siano collegati alla stessa terra o
stella EMC dell’inverter mediante un collegamento corto e di sezione elevata.
- Collegare la terra di ritorno dai motori controllati dai Drive direttamente al collegamento a terra (
associato.
) sull’inverter
- All’interno del quadro separare i cavi di controllo dai cavi di potenza per quanto possibile, utilizzando condotti separati, se necessario a 90° l’uno rispetto all’altro.
- Ogni qualvolta possibile, utilizzare cavi schermati per i collegamenti al circuito di controllo
- Assicurarsi che i contattori nel quadro siano dotati di soppressori, sia del tipo R-C per contattori CA o diodi volano
per contattori CC installati sulle bobine. Anche i soppressori a varistori sono efficaci. Ciò è importante quando si
devono controllare i contattori dai relè dell’inverter.
- Utilizzare cavi schermati o blindati per i collegati al motore e mettere a terra la schermatura ad entrambe le estremità utilizzando gli omega.
Nota! Per ulteriori informazioni relative al normativa sulla compatibilità elettromagnetica secondo la Direttiva 2004/108/EEC, le verifiche di conformità effettuate
sugli apparecchi Gefran, il collegamento dei filtri e degli induttori di rete, le schermature dei cavi, collegamenti di terra, ecc., consultate la “Guida alla compatibilità elettromagnetica” presente nel CD allegato a questo Drive.
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
29
7.1.4 Schema a blocchi parte di potenza
La topologia adottata prevede la presenza in ingresso di uno stadio di filtraggio EMI (escluso ADL130), uno stadio di
conversione AC/DC, un sistema per la precarica del banco di condensatori della sezione DC, uno stadio di conversione
DC / AC, un alimentatore ed un unità di frenatura integrata.
Per la gestione delle manovre di emergenza (mancanza alimentazione Drive) è prevista fra le altre, la possibilità di
connettere un modulo di emergenza fra i morsetti EM e D.
Per svolgere la funzione di frenatura è necessario connettere esternamente un apposito resistore.
La connessione del resistore esterno di frenatura varia a seconda della taglia del drive:
• per le taglie da 4 a 22 kW il resistore va connesso fra i morsetti C (o C1) e BR
• per le taglie da 30 a 55 kW il resistore va connesso tra i morsetti BR1 e BR2
• per la taglia 75 kW può essere utilizzata una unità di frenatura esterna opzionale BUy collegata ai morsetti C e D,
per ulteriori informazioni fare riferimento al manuale BUy.
C1
C
BR
1040 - 3220
Inverter
DC link
Emi filter & converter
Rprc
L1
L2
L3
U
V
W
EMI
filter
SMPS
D
EM
C
4300-5550
BR1 BR2
Inverter
DC link
Emi filter & converter
Rprc
L1
L2
L3
U
V
W
EMI
filter
SMPS
D
EM
C
5750
Inverter
DC link
Emi filter & converter
Rprc
L1
L2
L3
U
V
W
EMI
filter
SMPS
D
C1
EM
C
1011 - 3055
BR
Inverter
DC link
Emi filter & converter
Rprc
L1
L2
U
V
W
SMPS
D
30
EM
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
7.1.5 Filtro EMC interno (di serie)
Gli inverter della serie ADL200 sono equipaggiati internamente con un filtro EMI (opzionale per la serie ADL130) in
grado di garantire le prestazioni richieste dalla normativa EN 12015, primo ambiente, categoria C2, con massimo 10
metri di cavo motore schermato.
Il rispetto di questi requisiti permette l'integrazione del drive all'interno del sistema ascensore in conformita' con la EN
12015.
7.1.6 Collegamento linea di alimentazione
1040 - 3220 (ADL200 3ph)
L1 L2 L3 BR C1 C
D
U
V W EM
K1M
F1
L1
L2
L3
(3ph - 230 VAC / 400 VAC / 460-480 VAC, 50/60 Hz)
4300 - 5550 (ADL200 3ph)
L1 L2 L3 BR1 BR2 C
D
U
V W
EM
K1M
F1
L1
L2
L3
(3ph - 230 VAC / 400 VAC / 460-480 VAC, 50/60 Hz)
5750 (ADL200 3ph)
L1 L2 L3 C
D
U
V W
EM
K1M
F1
L1
L2
L3
(3ph - 230 VAC / 400 VAC / 460-480 VAC, 50/60 Hz)
1011 - 3055 (ADL130 1ph)
L1 L2
BR C1 C
D
U
V W EM
K1M
F1
L1
L2
(1ph - 200 VAC / 230 VAC, 50/60 Hz)
Nota!Abbinamento consigliato fusibili F1: vedere capitolo 5.1.1.
7.1.7 Collegamento induttanza AC e DC (opzionali)
(Solo per ADL200 trifase). Il Drive può utilizzare sia una induttanza trifase sulle linea di alimentazione AC che, solo per
le taglie da 4 a 22 kW, una induttanza DC posta tra i morsetti C1 e C. Per l’abbinamento consigliato vedere capitolo
5.2. Per le taglie da 4 a 22 kW, nel caso non venga utilizzata nessuna induttanza DC è necessario cavallottare i morsetti C1 e C.
Nel caso non venga utilizzata nessuna induttanza DC è necessario cavallottare i morsetti C1 e C.
Importante!
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
31
7.1.8 Collegamento del motore
D
U
V W EM
L1 L2 L3 BR1 BR2 C
D
EM
V W
EM
L1 L2
BR C1 C
D
U
M
3 ph
V W EM
K2M
K2M
K3M
U
4300 - 5550 (ADL200, 3ph)
K3M
D
V W
K2M
K2M
M
3 ph
1040 - 3220 (ADL200, 3ph)
L1 L2 L3 C
U
K3M
K3M
L1 L2 L3 BR C1 C
M
3 ph
5750 (ADL200, 3ph)
1011 - 3055 (ADL130, 1ph)
M
3 ph
7.1.9 Collegamento resistenza di frenatura (opzionale)
L1 L2 L3 BR C1 C
D
U
V W EM
Braking resistor
L1 L2 L3 BR1 BR2 C
U
V W
EM
Braking resistor
1040 - 3220 (ADL200 3ph)
L1 L2
D
BR C1 C
D
U
4300 - 5550 (ADL200 3ph)
V W EM
Braking resistor
1011 - 3055 (ADL130 1ph)
Nota!Abbinamento consigliato resistenze di frenatura: vedere capitolo 5.4 .
Per la taglia 75 kW può essere utilizzata una unità di frenatura esterna opzionale BUy collegata ai morsetti C e D, per ulteriori informazioni fare riferimento al
manuale BUy.
32
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
7.2 Parte di regolazione
To P-ADV
PC
(RS232)
Keypad
(RS485/422)
XS2
CAN (RC-ADL only)
R-ADL
RC-ADL
XS1
XP
XC
Figura 7.2.1: Identificazione schede e morsetti
XE
XO
EXP-I/O-...
EXP-DE-...
EXP-SE..-...
EXP-EN-...
EXP-HIP-..
....
T2
T3
XE
XER
T1
7.2.1 Sezione dei cavi
Massima sezione dei cavi
Morsetti
Spelatura consigliata
Coppia di serraggio (min)
(mm2)
(AWG)
(mm)
(Nm)
T3, T2, T1
0,2 ... 2,5 (1 cavo)
0,2 ... 0,75 (2 cavi)
26 ... 12
26 ... 19
5
0,4
XER, XE
0,2 ... 1,5 (1 cavo)
0,2 ... 0,5 (2 cavi)
26 ... 16
26 ... 19
5
0,25
7.2.2 Collegamento scheda I/O
Nota!Le morsettiere delle schede I/O sono tutte di tipo estraibile (esclusa EXP-IO-D54R3-F-ADL).
Per maggiori informazioni sulle schede EXP-IO-... vedere Appendice sezione A1.
Per le caratteristiche elettriche degli ingressi / uscite analogiche, digitali e relè vedere Appendice sezione A.2.
Figura 7.2.2-A: ADL200 - Morsettiera e collegamento scheda EXP-IO-D8R4-ADL
T3
50
R0 4O
51
RO 4C
Door
K2M
A2
K3M
A2
A1
RO 30
53
RO 3C
54
RO 2O
55
RO 2C
56
RO 1O
57
RO 1C
Run
Contactor
A1
BR
A2
52
Brake
Contactor
A1
Drive ON
L1
Emergency
Failure
K3M
K2M
BrakeFbk
MltSpd S2
MltSpd S1
MltSpd S0
Emergency mode
StartRevCmd
StartFwdCmd
T1
1
Digital Input 8X
2
Digital Input 7X
3
Digital Input 6X
4
Digital Input 5X
5
Digital Input 4X
6
Digital Input 3X
7
Digital Input 2X
8
Digital Input 1X
Abilitazione HW (Enable)
9
K3M
K2M Safety chain
Feedback contactor
10
DI COM
11
0V (24V) OUT
12
+24V OUT
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
33
Figura 7.2.2-B: ADL130 - Morsettiera e collegamento scheda EXP-IO-D54R3-F-ADL
K2M
A2
K3M
A2
T3
A1
RO 30
53
RO 3C
54
RO 20
55
RO 2C
56
RO 1O
57
RO 1C
Run
Contactor
A1
BR
A2
52
Brake
Contactor
A1
Drive ON
L1
Emergency
Failure
T1
MltSpd S1
MltSpd S0
4
Digital Input 5X
5
Digital Input 4X
6
Digital Input 3X
7
Digital Input 2X
8
Digital Input 1X
9
Abilitazione HW (Enable)
Emergency mode
StartRevCmd
StartFwdCmd
K3M
K2M Safety chain
Feedback contactor
Figura 7.2.3: Cablaggio consigliato Schede
34
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
10
DI COM
11
0V (24V) OUT
12
+24V OUT
7.2.3 Collegamento schede di Retroazione standard
In questa sezione sono indicati i collegamenti delle schede standard.
La designazione dei morsetti e il relativo collegamento cambia nelle varie versioni delle schede.
Attenzione!
Per ulteriori informazioni vedere Appendice sezione A2.
Nota!Le morsettiere delle schede di Retroazione sono tutte di tipo estraibile.
Figura 7.2.4: Collegamento schermatura (consigliata)
●●
Serie ADL210 e ADL220, scheda standard EXP-DE-IR1F2-ADL
Figura 7.2.5: Morsettiera e collegamento scheda EXP-DE-IR1F2-ADL
BB+
AA+
out
out
out
out
20
21
22
23
(*)
ZZ+
BB+
AA+
0VE out
+VE out
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
(*)
(*) Collegamento schermatura, vedere figura 7.2.4
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
35
●●
Serie ADL230, scheda standard EXP-SESC-IR1F2-ADL
Figura 7.2.6: Morsettiera e collegamento scheda EXP-SESC-IR1F2-ADL
BB+
AA+
out
out
out
out
20
21
22
23
(*)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
COSCOS+
SINSIN+
ZZ+
BB+
AA+
0VE out
+VE out
(*)
(*) Collegamento schermatura, vedere figura 7.2.4
●●
Serie ADL231, scheda standard EXP-EN/SSI-I1R1F2-ADL
Figura 7.2.7: Morsettiera e collegamento scheda EXP-EN/SSI-I1R1F2-ADL
BB+
AA+
out
out
out
out
20
21
22
23
(*)
DTDT+
CKCK+
VSVS+
BB+
AA+
0VE out
+VE out
(*)
(*) Collegamento schermatura, vedere figura 7.2.4
36
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
1
2
3
4
5
6
7
8 (**)
9 (**)
10
11
12
13
14
15
7.3 LED
Sul frontale del Drive ADL200 sono presenti 6 led di segnalazione dello stato del Drive.
SIEIDrive
ADL200
SD Card
Status LEDs
EN
Alarm
I Lim
Run
EN
CAN Error
WARNING:
Risk of Electric Shock.
Capacitive voltages above 50V may
remain for 5 minutes after power is
disconnected.
CAN Error
Connectors
CAN Run
CAN Error
Verde
Rosso
I Lim
CAN Run
Keypad
Colore
Verde
Rosso
Rosso
Verde
Alarm
Run
AVERTISSEMENT:
Risque de décharge électrique.
Des tensions supérieures à 50V
peuvent subsister aux bornes des
condensateurs durant 5 minutes
après la coupure de l’alimentation.
LEDs
EN
Alarm
ILim
Run
Status LEDs
CAN Run
PC
CAN
Significato dei Led
E’ acceso durante la modulazione IGBT
E’ acceso quando il Drive segnala la presenza di un allarme
E’ acceso quando il Drive funziona in limite di corrente
Lampeggia ad intermittenza (freq. 1 sec) in assenza di errori o anomalie.
Se acceso o spento segnala una condizione di errore (software hangup)
E’ acceso quando l’interfaccia CANopen si trova nello stato Operational
E’ acceso quando l’interfaccia CANopen si trova in allarme
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
37
7.4 Schemi di collegamento
Nota!In questo capitolo sono indicati gli schemi tipici di collegamento riferiti ai Drive ADL2.0 in configurazione standard.
7.4.1 Potenziali della regolazione, I/O digitali
Cavo
schermato
43
42
Analog input 1
Analog output 1
41
40
47
Cavo
schermato
Analog input 2
0V
46
Chassis
Analog output 2
45
44
Chassis
9
+24V
Abilitazione HW (Enable)
49
+10V out
48
-10V out
8
Digital input 1
56
(Relè 1)
57
n
(Relè n)
n
n
29 DO-PS
+24V
Digital input n
Digital Output 1
0V(+24V)
DI COM
10
27
Digital Output n
n
Fusibile
ripristinabile
LOAD
LOAD
DO CM
28 0V(+24V)
12
+24V_OUT
11
0V (24V)_OUT
Alimentazione isolata
per Ingressi/Uscite
Chassis
38
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
7.4.2 Schema tipico di collegamento
Figura 7.4.1: Schema tipico (taglie ADL200-1040 ...3220)
3 Phase Mains
F1
1
3
5
2
4
6
K1M
OPTIONAL
L1
AC
BREAKING
RESISTORS
OPTIONAL
L1
L2
U1
V1 W1
L3
PE
KEYPAD / DCP
PC
L
SH
H
R-ADL
CAN
BR
RS232
C
ADL200
P-ADL
C1
EXP-ENC
L1
EXP-IO
56
Emergency
Failure
Safety
chains
L1
K2M
K3M
TRAFO
DRIVE
OK
57
12
54
11
55
24VOUT
10
52
0VOUT
9
53
DICM
8
DOOR
50
ENHW
7
RUN
BRAKE
CONTACTOR CONTACTOR
51
DI2
6
DI1
5
StartFwdCmd
K2M
2 4 6
4
StartRevCmd
K2M
1 3 5
3
DI4
2
DI3
1
Emergency mode
PE
MltSpd S0
PE
DI6
T3
DI5
T2
MltSpd S2
T1
MltSpd S1
V2 W2
BrakeFbk
U2
DI8
EM
DI7
D
DC
1 3 5
K3M
BR
2 4 6
K3M
A1
A1
A1
A2
A2
A2
K2M
K3M
K2M
BRAKE
K3M
BR
M
3~
FBR
Figura 7.4.2: Schema tipico (taglie ADL200-4300 ...4450)
3 Phase Mains
F1
1
3
5
2
4
6
K1M
OPTIONAL
L1
AC
BREAKING
RESISTORS
L1
L2
U1
V1 W1
L3
PE
KEYPAD / DCP
PC
L
SH
H
R-ADL
CAN
BR1
RS232
BR2
ADL200
P-ADL
C
EXP-ENC
EXP-IO
2 4 6
K3M
TRAFO
56
DRIVE
OK
57
12
54
11
55
10
52
24VOUT
9
53
0VOUT
8
51
DICM
7
RUN
BRAKE
CONTACTOR CONTACTOR
DOOR
50
ENHW
6
DI2
5
DI1
DI4
4
DI3
3
StartFwdCmd
K2M
2
StartRevCmd
K2M
1 3 5
1
Emergency mode
PE
MltSpd S0
PE
DI6
T3
DI5
T2
MltSpd S2
T1
MltSpd S1
V2 W2
DI8
U2
BrakeFbk
EM
DI7
D
Emergency
Failure
Safety
chain
L1
K2M
1 3 5
K3M
BR
2 4 6
K3M
A1
A1
A1
A2
A2
A2
K2M
K3M
K2M
BRAKE
K3M
BR
M
3~
FBR
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
39
Figura 7.4.2: Schema tipico (taglie ADL130-1011 ...3055)
Single Phase Mains
F1
1
3
2
4
K1M
OPTIONAL
L1
AC
BREAKING
RESISTORS
OPTIONAL
L1
L2
U1
V1
PE
KEYPAD / DCP
PC
L
SH
H
R-ADL
CAN
BR
RS232
C
ADL100-1ph
P-ADL
C1
EXP-ENC
L1
EXP-IO
K2M
2 4 6
56
12
Emergency
Failure
Emergency
Failure
L1
K2M
TRAFO
1 3 5
K3M
BR
2 4 6
K3M
A1
A1
A1
A2
A2
A2
K2M
K3M
K2M
BRAKE
M
3~
40
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
DRIVE
OK
57
11
54
10
55
9
52
24VOUT
8
RUN
BRAKE
CONTACTOR CONTACTOR
53
0VOUT
7
DICM
6
DI1
5
ENHW
4
DI3
PE
DI2
PE
StartFwdCmd
1 3 5
T3
StartRevCmd
T2
Emergency mode
T1
DI5
V2 W2
MltSpd S1
U2
MltSpd S0
EM
DI4
D
DC
K3M
BR
7.4.3 Schema collegamento di emergenza
Per la gestione del movimento del motore in emergenza in caso di mancanza rete (con alimentazione monofase di 230
Vca da dispositivo UPS), è possibile utilizzare lo schema indicato in questo paragrafo.
Figura 7.4.4: Schema collegamento di emergenza (taglie ADL200-1040 ...3220)
3 PHASE MAINS
F1
S2
UPS
1ph, 230V
50Hz
US1
S1
1
3
5
2
4
6
US2
S2
L1
AC
BREAKING
RESISTORS
OPTIONAL
L1
L2
L3
U1
V1
W1
PE
PC
KEYPAD / DCP
L
SH
H
R-ADL
CAN
BR
RS232
C
ADL200
DC CHOKE
P-ADL
C1
EXP-ENC
L1
2 4 6
MltSpd S0
K2M
MltSpd S2
1 3 5
MltSpd S1
OPTIONAL
0VOUT
24VOUT
7
DICM
6
DI1
5
ENHW
4
8
9
10
11
12
StartFwdCmd
3
DI3
2
DI2
1
StartRevCmd
PE
DI5
PE
DI4
T3
EM
Emergency mode
EMERGENCY
MODE
SUPPLIER
DI6
W2
T2
DI8
V2
T1
D
BrakeFbk
_
KB
EMS (*)
+
U2
C
DI7
EM
Battery Pack
EXP-IO
D
DC
Safety
chains
K2M
1 3 5
K3M
2 4 6
BR
K3M
K2M
K3M
BRAKE
~
+
~
-
M
3~
FBK
(*) Modulo EMS in alternativa a dispositivo UPS.
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
41
Figura 7.4.5: Schema collegamento di emergenza (taglie ADL200-4300 ...4450)
3 PHASE MAINS
F1
S2
UPS
S1
US1
1ph, 230V
50Hz
1
3
5
2
4
6
US2
S2
L1
AC
BREAKING
RESISTORS
L1
L2
L3
U1
V1
W1
PE
PC
KEYPAD / DCP
L
SH
H
R-ADL
CAN
BR1
RS232
BR2
ADL200
P-ADL
C
EXP-ENC
EXP-IO
K2M
2 4 6
MltSpd S0
1 3 5
MltSpd S2
OPTIONAL
0VOUT
24VOUT
8
ENHW
7
DICM
6
DI2
5
DI1
4
StartRevCmd
3
StartFwdCmd
2
DI4
1
DI3
PE
EM
Emergency mode
PE
DI6
T3
D
EMERGENCY
MODE
SUPPLIER
DI5
W2
T2
MltSpd S1
_
V2
T1
BrakeFbk
+
KB
Battery Pack
U2
C
EMS (*)
DI8
EM
DI7
D
9
10
11
12
Safety
chains
K2M
1 3 5
K3M
2 4 6
BR
K3M
K2M
K3M
BRAKE
~
+
~
-
M
3~
FBK
(*) Modulo EMS in alternativa a dispositivo UPS.
Mains
(1) L'alimentazione è interrotta, il drive segnala Sottotensione
(2)
(1)
(2) L'alimentazione può essere ripristinata in ogni momento durante la marcia, ma il
drive è separato dalla rete da S1
Motor speed
(3) Il motore è frenato
(4)
(3)
(4) Vengono dati i comandi Marcia Avanti o Marcia Indietro. Deve essere impostata
una velocità molto bassa (Menu 5.6.1, PAR 12060 ). La cabina viene portata al piano.
L'allarme Sottotensione è ignorato.
(5) Il drive deve essere spento. Questo tempo dipende dalla taglia del drive. Il contattore S1 deve essere OFF.
(6)
(5)
US1
(6) Il drive deve essere spento. S1 deve essere OFF.
(7)
US2
(8)
42
(9)
(7) Portare S2=ON, l'alimentazione è fornita da UPS. Mentre S2 è ON la logica dei
contatti deve garantire che S1=OFF
(8) S2 può essere portato allo stato ON, con un ritardo, in modo manuale o in automatico tramite dispositivi di verifica mancanza rete.
(9) Al termine della sequenza S2 deve essere OFF
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
Figura 7.4.6: Schema collegamento di emergenza (taglie ADL130-1011 ...3055)
SINGLE PHASE MAINS
F1
S2
UPS
1ph, 230V
50Hz
US1
S1
1
3
2
4
US2
S2
L1
AC
BREAKING
RESISTORS
OPTIONAL
L1
L2
U1
V1
PE
KEYPAD / DCP
PC
L
SH
H
R-ADL
CAN
BR
RS232
C
DC CHOKE
EXP-ENC
EXP-IO
K2M
TRAFO
2 4 6
DICM
0VOUT
24VOUT
7
DI1
6
8
9
10
11
12
Emergency
Failure
K2M
1 3 5
K3M
K2M
K3M
5
MltSpd S1
1 3 5
BR
4
ENHW
PE
StartFwdCmd
PE
DI3
T3
EM
DI2
W2
T2
StartRevCmd
V2
T1
Emergency mode
U2
D
MltSpd S0
EMERGENCY
MODE
SUPPLIER
C
DI5
EM
OPTIONAL
DI4
D
EMS (*)
Battery Pack
ADL130-1ph
P-ADL
C1
L1
DC
K3M
2 4 6
BRAKE
M
3~
(*) Modulo EMS in alternativa a dispositivo UPS.
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
43
7.5 Interfaccia seriale (Connettore PC)
SIEIDrive
ADL200
SD Card
Funzione / Function
I/O
PIN 1
-
–
Interfaccia elettr./ Elect. Interface
–
PIN 2
TxD
O
RS232
PIN 3
RxD
I
RS232
PIN 4
-
–
–
PIN 5
0V (Ground)
–
Alimentazione / Supply
PIN 6
-
PIN 7
-
–
–
PIN 8
-
–
–
PIN 9
+5V
–
Alimentazione / Supply
Status LEDs
EN
Alarm
I Lim
Run
CAN Run
–
CAN Error
WARNING:
Risk of Electric Shock.
Capacitive voltages above 50V may
remain for 5 minutes after power is
disconnected.
AVERTISSEMENT:
Risque de décharge électrique.
Des tensions supérieures à 50V
peuvent subsister aux bornes des
condensateurs durant 5 minutes
après la coupure de l’alimentation.
I = Ingresso / Input
O = Uscita / Output
Connectors
Keypad
PC
CAN
5
1
6
9
Il Drive ADL è dotato di serie di una porta (connettore a vaschetta DSUB 9 poli femmina) per il collegamento della linea
seriale RS232 utilizzata per la comunicazione punto-punto Drive-PC (tramite il software di configurazione GF-eXpress).
Nota! La porta non è isolata galvanicamente, pertanto qualora sia necessaria la separazione galvanica deve essere utilizzata l’opzione PC-OPT-ADL
7.5.1 Collegamento punto-punto Drive / Porta RS232
RxD
TxD
+5 V
PE
XS2
5
4
9
2
3
8
7
1
6
RS232
Figura 7.5.1: Collegamento seriale (non isolato)
Per il collegamento deve essere utilizzato un doppino costituito da due conduttori simmetrici, spiralati con uno schermo
comune, più il cavo per il collegamento di terra, collegati come indicato in figura (è consigliato un cavo RS232 3 fili tipo
non incrociato). La massima velocità di trasmissione è di 38,4 kBaud.
Per la connessione della linea seriale RS232 al PC vedere la figura seguente.
PC con porta RS232
Fig. A
RS232
(PC)
Opzione
PC-OPT-ADL
(S573L)
Cavo schermato con
connettori,
5 mt (8S8F59)
PC con porta RS232
Fig. B
RS232
(PC)
Cavo schermato con connettori,
5 mt (8S8F59)
RS232
(PC)
RS232
Cavo schermato con
connettori,
5 mt (8S8F59)
USB
PC con porta USB
Fig. C
USB RS232 converter
(S5A20)
Figura 7.5.2: Collegamento RS232 al PC
Collegamento ad un PC con porta RS232 e opzione PC-OPT-ADL (isolato)
Per il collegamento sono necessari:
44
•
scheda opzionale PC-OPT-ADL (per la separazione galvanica), codice S573L.
•
un cavo schermato (codice 8S8F59) per il collegamento alla porta PC RS232 del Drive al connettore RS232 del
PC, vedere figura 7.5.1-A.
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
Collegamento ad un PC con porta RS232 (non isolato)
Per il collegamento sono necessari:
•
un cavo schermato (codice 8S8F59) per il collegamento alla porta PC RS232 del Drive al connettore RS232 del
PC, vedere figura 7.5.1-B.
Collegamento ad un PC con porta USB (non isolato)
Per il collegamento sono necessari:
•
un adattatore opzionale USB/ RS232, codice S5A20 (include il cavo per il collegamento USB)
•
un cavo schermato (codice 8S8F59) per il collegamento alla porta PC RS232 del Drive all’adattore USB/RS232,
vedere figura 7.5.1-C.
7.6 Interfaccia CAN
CANopen è un profilo di comunicazione per sistemi industriali basato su CAL (fare riferimento al manuale CANopen
CAL-Base COMMUNICATION PROFILE for Industrial Systems; CiA Draft Standard 301 Version 4.2 Date 13 February
2002 by CAN in Automation e. V.).
Il Drive ADL200 in fase di ordinazione può essere richiesto con interfaccia per il collegamento alle reti CAN (modelli
ADL2.0-...-C). Il Drive implementa anche il profilo DS402 secondo la specifica CANopen Device Profile Drives and
Motion Control v4.02. Come protocollo CAN (ISO 11898) viene usato CAN2.0A con l’identificatore a 11 bit. L’interfaccia
integrata CANopen è sviluppata come Minimum Capabilty Device. Lo scambio di dati avviene ciclicamente; l’unità
Master legge i dati messi a disposizione dagli Slaves e scrive i dati di riferimento agli Slaves.
L’interfaccia è dotata di isolamento funzionale (> 1kV).
La connessione si effettuale sul connettore CAN (XC) e non necessità di alimentazione.
SIEIDrive
ADL200
SD Card
Status LEDs
EN
Alarm
I Lim
Run
CAN Run
CAN LEDs
CAN Error
WARNING:
Risk of Electric Shock.
Capacitive voltages above 50V may
remain for 5 minutes after power is
disconnected.
CAN connector (XC)
AVERTISSEMENT:
Risque de décharge électrique.
Des tensions supérieures à 50V
peuvent subsister aux bornes des
condensateurs durant 5 minutes
après la coupure de l’alimentation.
L SH H
Connectors
Keypad
Morsetto
L
SH
H
CAN Run
(verde)
Spento
Acceso
Acceso
Designazione
CAN_L
CAN_SHLD
CAN_H
LEDs
CAN Err
(rosso)
Spento
Spento
Acceso
PC
CAN
Funzione
Linea bus CAN_L (dominante bassa)
Schermatura CAN
Linea bus Can_H (dominante alta)
Sezione cavo
0,2 ... 2,5 mm2
AWG 26 ... 12
Significato
Arresto
Stato pre-operativo
Stato operativo
Per il collegamento al Bus deve essere usato un doppino schermato (del tipo indicato dalla specifica CANopen) che
deve essere posato separato dai cavi di potenza, con una distanza minima di 20 cm. La schermatura del cavo
deve essere connessa a massa alle due estremità. Se le schermature del cavo sono messe a massa in punti diversi
del sistema, per ridurre il flusso di corrente tra i Drive e il master CAN bus usare cavi di collegamento equipotenziale.
Nota! Nota sulle terminazioni: il primo e ultimo partecipante della rete deve avere una resistenza da 120 ohms tra i pin L e H.
CAN-H
CAN-L
MASTER
CANopen
ADL200
ADL200
CAN (XC)
CAN (XC)
L SH H
L SH H
120 ohm
120 ohm
Figura 7.6.1: Collegamento BUS CAN
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
45
7.7 Interfaccia Tastierino (Connettore Keypad)
SIEIDrive
ADL200
SD Card
Status LEDs
EN
Alarm
I Lim
Run
CAN Run
CAN Error
WARNING:
Risk of Electric Shock.
Capacitive voltages above 50V may
remain for 5 minutes after power is
disconnected.
5
1
AVERTISSEMENT:
Risque de décharge électrique.
Des tensions supérieures à 50V
peuvent subsister aux bornes des
condensateurs durant 5 minutes
après la coupure de l’alimentation.
6
Connectors
Keypad
PC
9
Keypad connector (XS1)
CAN
Al connettore multifunzione Keypad (connettore a vaschetta 9 poli femmina DSUB XS1) possono essere connessi
diversi dispositivi che vengono automaticamente riconosciuti e gestiti.
1) Tastierino opzionale KB-ADL (connessione di default)
- Il tastierino è fornito con un cavo di lunghezza 40 cm, per lunghezze superiori , deve essere utilizzato un cavo del
tipo 1:1 non incrociato (9 cavi schermato, ad esempio codice 8S8F59, lunghezza 5 mt).
-
Per cavi di lunghezza elevata (massimo 15 mt), questi devono essere di qualità e con bassa caduta di tensione
(massimo 0,3 ohm / mt)
2) I/F Protocollo DCP
-
Per la connessione fare riferimento alla specifica DCP (vedi schema seguente)
TxA
TxB
GND
XS1
5
4
9
2
3
8
7
1
6
Figura 7.5.3: Collegamento DCP (non isolato)
I collegamenti (1) e (2) sono privi di isolamento galvanico !
Attenzione!
7.8 Memorizzazione dati su Memory Card
Il Drive ADL200 permette il salvataggio dei dati su una comune scheda di memoria di tipo Secure Digital. Per poter
utilizzare la scheda di memoria è necessario collegare l’apposito adattatore (SDCARD-ADL) da inserire nello slot dedicato sul frontale del Drive. Per ulteriori informazioni vedere il capitolo 8.9.
SIEIDrive
ADL200
SD Card
SD Card
Status LEDs
EN
Alarm
I Lim
Run
CAN Run
CAN Error
WARNING:
Risk of Electric Shock.
Capacitive voltages above 50V may
remain for 5 minutes after power is
disconnected.
7.9 Frenatura
AVERTISSEMENT:
Risque de décharge électrique.
Des tensions supérieures à 50V
peuvent subsister aux bornes des
condensateurs durant 5 minutes
après la coupure de l’alimentation.
Esistono diverse possibilità di frenatura:
Connectors
Keypad
PC
CAN
- mediante unità di frenatura interna
- mediante iniezione di corrente continua nel motore da parte dell’inverter (frenatura in CC).
Le due possibilità presentano queste differenze fondamentali:
- Con una unità di frenatura è possibile ottenere una frenatura intermedia (ad esempio da 1000 ad 800 giri/min)
mentre la frenatura in CC è utilizzabile solo per fermare il motore fino a velocità zero.
- L’energia che si trova nell’azionamento viene trasformata in calore in ambedue i casi: con l’utilizzo di una unità di
frenatura viene dissipata su una resistenza esterna, mentre per la frenatura in CC avviene sotto forma di trasformazione in calore negli avvolgimenti del motore (riscaldamento ulteriore del motore).
46
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
7.9.1 Unità di frenatura interna
I motori asincroni regolati in frequenza, durante il funzionamento ipersincrono o rigenerativo, si comportano come
generatori, recuperando energia che fluisce attraverso il ponte inverter, nel circuito intermedio come corrente continua.
Questo provoca un aumento della tensione del circuito intermedio. Per impedire che la tensione raggiunga valori non
consentiti vengono impiegate delle unità di frenatura (BU).
Al raggiungimento di un determinato valore di tensione, queste inseriscono una resistenza di frenatura in parallelo ai
condensatori del circuito intermedio. L’energia recuperata viene dissipata in calore dalla resistenza (Rbr). Per questo si
possono realizzare tempi di decelerazione molto brevi ed un funzionamento su quattro quadranti limitato.
I Drive della serie ADL (≤ 55kW) dispongono in configurazione standard di una unità di frenatura interna.
_
E
R BR
U ZK
M
3
BU
Figura 7.9.1: Funzionamento con unità di frenatura (schema di principio)
Nota!Quando è presente l’unità di frenatura interna la protezione deve essere realizzata con fusibili extrarapidi! Osservare le relative prescrizioni di montaggio.
La connessione della resistenza di frenatura (morsetti BR e C oppure BR1 e BR2) deve essere eseguita utilizzando un
cavo twistato. Se la resistenza dispone di protezione termica (Klixon), tale protezione può essere collegata all’ingresso
di “External fault” del Drive.
Tabella 7.9.1: Dati tecnici delle unità di frenatura interna
Taglia
Irms
(A)
Ipk
(A)
Rbr
(Ω)
1040
5,5
7,8
100
1055
8,5
12
67
2075
8,5
12
67
2110
15,5
22
36
3150
22
31
26
3185
37
52
15
3220
37
52
15
4300
57
80
10
4370
57
80
10
4450
76
107
7,5
5550
76
107
7,5
ADL200-... , 3ph
5750
Unità esterna (serie BUy, opzionale)
ADL130-..., 1ph
1011
5,5
7,8
86
1015
8,5
12
68
2022
8,5
12
49
2030
15,5
22
34
3040
22
31
26
3055
37
52
15
Irms
Corrente nominale dell’unità di frenatura, duty cycle = 50%
Ipk
Corrente di picco erogabile per massimo 60 secondi
Rbr Valore minimo resistenza di frenatura
Tabella 7.9.2: Soglia di Intervento Unità di frenatura
Taglia
Vbr @ 480 V
ON
Vbr @460 V
OFF
ON
Vbr @ 400 V
OFF
Vbr @ 230V
ON
OFF
ON
OFF
670 Vcc
660 Vcc
394 Vcc
384 Vcc
-
-
394 Vcc
384 Vcc
ADL200-... , 3ph
1040 ... 3220
800 Vcc
790 Vcc
768 Vcc
758 Vcc
ADL130-..., 1ph
1011 ... 3055
-
-
-
-
Nota!Per l’abbinamento delle resistenze di frenatura consigliate vedere il capitolo 5.4.
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
47
8. Utilizzo del tastierino
In questo capitolo vengono descritti il tastierino opzionale KB-ADL e le modalità di utilizzo per la visualizzazione e la
programmazione dei parametri dell’inverter.
8.1 Descrizione
→
Led di segnalazione dello stato del Drive
BRK
CNT
01
02
03
04
05
EN
ILim
n=0
AL
MONITOR
DRIVE INFO
STARTUP WIZARD
DRIVE CONFIG
LIFT
→
ESC
Tastiera a membrana
SAVE
←
Display a cristalli liquidi 5 righe alfanumeriche di 21
caratteri ciascuna
DISP
E
CUST
FIND
RST
Il tastierino di programmazione viene utilizzato per la visualizzazione dei parametri di stato e di diagnostica durante il
periodo operativo; dispone sul retro di una striscia di materiale magnetico per il fissaggio sul frontale del Drive o su di
una superficie metallica (es. portina del quadro elettrico). Il tastierino può essere remotato fino ad una distanza massima di 15 metri e di serie è fornito con un cavo di collegamento di 70 centimetri. Con il tastierino KB-ADL è possibile
memorizzare fino a 5 set di parametri e trasferirli ad altri Drive.
8.1.1 Tastiera a membrana
Di seguito sono riportate le descrizioni dei tasti della tastiera a membrana e le loro funzioni
Simbolo
Riferimento
Descrizione
Torna al menù o sottomenù superiore. Esce da un parametro, da una lista di parametri, dalla lista degli ultimi 10 parametri e
dalla funzione FIND
Consente di uscire da un messaggio che ne richiede l’uso.
ESC
Escape
SAVE
Salva
Effettua direttamente il salvataggio dei parametri nella memoria non volatile senza dover accedere al parametro 4.1 Salva
parametri
FIND
Trova
Attiva la funzione con la quale è possibile accedere ad un parametro attraverso il suo numero. Da questa funzione si esce
premendo il tasto .
Cancella gli allarmi, solo se le cause sono rientrate.
RST
Reset
CUST
Custom
Visualizza gli ultimi 10 parametri modificati. Da questa funzione si esce premendo il tasto .
DISP
Display
Visualizza una lista di parametri di funzionamento del Drive.
E
Enter
Up
Sposta verso l’alto la selezione in un menù o una lista di parametri.
Durante la modifica di un parametro, incrementa il valore della cifra sotto il cursore.
Down
Sposta verso il basso la selezione in un menù o una lista di parametri.
Durante la modifica di un parametro, decrementa il valore della cifra sotto il cursore.
Left
Torna al menù superiore. Durante la modifica di un parametro, sposta il cursore verso sinistra.
Right
Entra nel sottomenù o nel parametro selezionato. Durante la modifica di un parametro, sposta il cursore verso destra.
Entra nel sottomenù o nel parametro selezionato, oppure seleziona un’operazione, È utilizzato durante la modifica dei parametri
per confermare il nuovo valore impostato.
8.1.2 Significato dei Leds
48
LEDs
Colore
Significato dei Led
BRK
Giallo
Il Led è acceso quando il Drive ha attivato il comando per l’apertura del freno
CNT
Giallo
Il Led è acceso quando il Drive ha attivato il comando di chiusura dei contattori
EN
Verde
Il Led è acceso durante la modulazione IGBT (Drive funzionante)
ILIM
Rosso
Quando questo led si accende il Drive ha raggiunto una condizione di limite di corrente. Durante il funzionamento normale
questo led è spento.
N=0
Giallo
Il led è acceso quando la velocità del motore vale 0.
AL
Rosso
Il led è acceso quando il Drive segnala l’intervento di un allarme
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
8.2 Navigazione
8.2.1 Scansione dei menu di primo e di secondo livello
Primo Livello
01
02
03
04
05
23
01
02
03
04
STORICO ALLARMI
MONITOR
INFORMAZIONI DRIVE
STARTUP GUIDATO
CONFIG DRIVE
q
01
02
03
04
05
MONITOR
INFORMAZIONI DRIVE
STARTUP GUIDATO
CONFIG DRIVE
LIFT
MONITOR
INFORMAZIONI DRIVE
STARTUP GUIDATO
CONFIG DRIVE
LIFT
Primo Livello
20
21
22
23
01
FUNZIONI
COMUNICAZIONE
CONFIG ALLARMI
STORICO ALLARMI
MONITOR
u
Secondo Livello
20.1
20.2
20.3
20.4
20.5
COMPENS INERZIA
FRENATURA DC
SOVRACC MOTORE
SOVRACC RES FRE
DOPPIO SET PAR
Nota !Questo esempio è visibile solo in modalità Esperto.
8.2.2 Visualizzazione di un parametro
j
k
l
14 DATI MOTORE
m
Def:
01/25
PAR: 2000
Tensione nominale
400
400 V
o
(1) Indicazione del menu nel quale il parametro si trova (in questo caso menu 14 – DATI MOTORE)
(2) Posizione del parametro nella struttura di menu (01)
(3) Descrizione del parametro (Tensione nominale)
(4) Dipende dal tipo del parametro:
•
Parametro numerico: visualizza il valore numerico del parametro, nel formato richiesto e l’unità di misura.
•
Selezione binaria: il parametro può assumere solo 2 stati indicati con Acceso - Spento oppure 0 - 1.
•
Parametro tipo LINK: visualizza la descrizione del parametro impostato dalla lista di selezione.
•
Parametro tipo ENUM: visualizza la descrizione della selezione
•
Comando: visualizza la modalità di esecuzione del comando
(5) Numero del parametro
(6) In questa posizione può essere visualizzato:
•
•
•
•
•
Parametro numerico: visualizza i valori di default, minimo e massimo del parametro. Questi valori vengono visualizzati in sequenza premendo il tasto ►.
Parametro tipo LINK: visualizza il numero (PAR) del parametro impostato.
Parametro tipo ENUM: visualizza il valore numerico corrispondente alla selezione attuale.
Comando: in caso di errore nel comando, segnala di premere ESC per terminare il comando.
Segnalazioni e condizioni di errore:
Param read only si cerca di modificare un parametro di sola lettura
Password active è attiva la password per la protezione dei parametri
Drive enabled si cerca di modificare un parametro non modificabile con il Drive abilitato
Input value too high valore inserito troppo alto
Input value too low valore inserito troppo basso
Out of range si cerca di inserire un valore fuori dai limiti min e max
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
49
8.2.3 Scansione dei parametri
01
02
03
04
05
MONITOR
INFORMAZIONI DRIVE
STARTUP GUIDATO
CONFIG DRIVE
LIFT
01 MONITOR
u
01/20
01 MONITOR
PAR:
250
Corrente di uscita
0.0 A
0%
20/20
PAR:
1400
Mon uscite dig X
00000000010001
01 MONITOR
q
02/20
PAR:
252
Tensione di uscita
0v
0%
8.2.4 Lista degli ultimi parametri modificati
Premendo il tasto CUST si accede ad una lista che contiene gli ultimi 10 parametri che sono stati modificati. Viene
visualizzato un parametro per volta ed utilizzando i tasti ▲ e ▼ è possibile scorrere la lista.
Per uscire da questa lista, si preme il tasto ►.
8.2.5 Funzione “FIND”
Premendo il tasto FIND si attiva la funzione con cui è possibile accedere a qualsiasi parametro inserendo solo il numero software del parametro (PAR).
Quando è visualizzato il parametro raggiunto dal “FIND”, è possibile navigare in tutti i parametri che fanno parte dello
stesso gruppo, utilizzando i tasti ▲ e ▼. Premendo tasto ► si torna alla funzione “FIND”.
Per uscire dalla funzione premere il tasto ►.
8.3 Modifica parametri
Per entrare nel modo di modifica dei parametri bisogna premere il tasto E quando è visualizzato il parametro che si
vuole modificare.
Per salvare il valore del parametro, dopo averlo modificato, si preme di nuovo il tasto E.
Nota !Per salvare in modo permanente vedere il paragrafo 8.4.
Per uscire dal modo modifica senza salvare il valore si preme il tasto ESC.
Le operazioni da compiere per modificare il valore dipendono dal tipo del parametro, come descritto di seguito.
Nota !Per ulteriori informazioni sul tipo di parametri visualizzati vedere il paragrafo 8.2.2 .
●●
14
15
16
17
18
Parametri numerici
DATI MOTORE
CONFIG ENCODER
GUAD REG VELOCITA’
PARAM REGOLATORI
CONFIG COPPIA
14 DATI MOTORE
u
01/25
14 DATI MOTORE
PAR: 2000
Tensione nominale
Def:
400
400 V
01/25
E
PAR:
2000
Tensione nominale
000000400 v
Def:
400
Quando si preme E, per entrare nel modo modifica, viene attivato il cursore sulla cifra corrispondente all’unità.
Utilizzando i tasti ◄ e ► il cursore può essere spostato su tutte le cifre, compresi gli zeri non significativi, che normalmente non sono visualizzati.
Con i tasti ▲ e ▼ la cifra sotto il cursore viene incrementata o decrementata.
Premere E per confermare la modifica o ESC per annullare.
●●
Parametri binari (tipo BIT)
Il parametro può assumere solo due stati che sono indicati con Acceso-Spento oppure con 0-1.
11
14
15
16
17
USCITE DIGITALI
DATI MOTORE
CONFIG ENCODER
GUAD REG VELOCITA'
PARAM REGOLATORI
11 USCITE DIGITALI
ux8
09/16
11 USCITE DIGITALI
PAR: 1430
Inv uscita dig 1X
Spento
09/16
E
PAR: 1430
Inv uscita dig 1X
Spento
11 USCITE DIGITALI
09/16
PAR: 1430
Inv uscita dig 1X
Acceso
Premendo E si attiva il modo di modifica. Tutta la riga viene visualizzata in campo inverso. Con i tasti ▲ e ▼, si passa
da uno stato all’altro. Premere E per confermare la modifica o ESC per annullare.
50
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
●●
Parametri LINK
Il parametro può assumere come valore il numero di un altro parametro.
11
14
15
16
17
USCITE DIGITALI
DATI MOTORE
CONFIG ENCODER
GUAD REG VELOCITA'
PARAM REGOLATORI
u
11 USCITE DIGITALI
11 USCITE DIGITALI
01/16
01/16
PAR:
1410
E
Sorg uscita dig 1X
»Azionamento OK
Valore: 1062
PAR:
11 USCITE DIGITALI
1410
Sorg uscita dig 1X
»Azionamento OK
Valore: 1062
01/16
PAR: 1410
Sorg uscita dig 1X
»Mon ing digitale 12X
Valore: 1232
11 USCITE DIGITALI
q
01/16
PAR:
1410
Sorg uscita dig 1X
»Azionamento pronto
Valore: 1064
Premendo E si attiva il modo di modifica. Tutta la riga viene visualizzata in campo inverso. Con i tasti ▲ e ▼, si scorrono gli elementi della lista dei parametri associata a questo parametro.
Premere E per confermare la modifica o ESC per annullare.
●●
Parametri ENUM
Il parametro può assumere solo i valori contenuti in una lista di selezione.
01
02
03
04
05
MONITOR
INFORMAZIONI DRIVE
STARTUP GUIDATO
CONFIG DRIVE
LIFT
04 CONFIG DRIVE
u qx2
03/17
PAR:
04 CONFIG DRIVE
554
E
Modalità accesso
Facile
Valore: 0
03/17
PAR:
554
Modalità accesso
Esperto
Valore: 1
Premendo E si attiva il modo di modifica. Tutta la riga viene visualizzata in campo inverso. Con i tasti ▲ e ▼, si scorrono gli elementi della lista di selezione.
Premere E per confermare la modifica o ESC per annullare.
●●
Esecuzione comandi
Un parametro può essere utilizzato per eseguire alcune operazioni sul Drive. Come esempio vedere il paragrafo 8.4 :
in questo caso al posto del valore compare la richiesta “Premere E per eseguire”.
Per eseguire il comando si preme E. Durante l’esecuzione del comando compare la scritta “In esecuzione” per indicare che l’esecuzione è in corso. Alla fine dell’esecuzione, se l’esito è positivo, compare per alcuni secondi la scritta
“Eseguito”. Se l’esecuzione è fallita compare una segnalazione di errore.
8.4 Salvataggi parametri
Per salvare i parametri nella memoria non volatile del Drive sono possibili due procedure:
1) Premere il tasto SAVE sul tastierino.
2) Menu 04 CONFIG DRIVE, parametro 04.01 Salva parametri, PAR : 550. Consente di salvare le variazioni alle
impostazioni dei parametri perché vengano mantenute anche allo spegnimento.
01
02
03
04
05
MONITOR
INFORMAZIONI DRIVE
STARTUP GUIDATO
CONFIG DRIVE
LIFT
04 CONFIG DRIVE
u
01/17
PAR:
04 CONFIG DRIVE
550
Salva parametri
Prem E per eseguire
01/17
E
PAR:
Salva parametri
In avanzamento
04 CONFIG DRIVE
550
01/17
PAR:
550
Salva parametri
Eseguito
Per uscire premere il tasto ◄.
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
51
8.5 Configurazione display
8.5.1 Selezione della lingua
Menu 04 CONFIG DRIVE, parametro 04.15 Selezione lingua, PAR: 578,
default=English. Consente di impostare la lingua tra quelle disponibili : English, Italiano, Francais, Deutsch e Espanol.
01
02
03
04
05
MONITOR
INFORMAZIONI DRIVE
STARTUP GUIDATO
CONFIG DRIVE
LIFT
04 CONFIG DRIVE
ux6
11/17
PAR:
04 CONFIG DRIVE
578
11/17
E
Selezione lingua
English
PAR:
04 CONFIG DRIVE
578
Selezione lingua
English
Valore: 0
Valore: 0
11/17
PAR:
578
Selezione lingua
Italiano
Valore: 1
Premere E per confermare la modifica o ESC per annullare.
8.5.2 Selezione Facile/Esperto
Menu 04 CONFIG DRIVE, parametro 04.03 Modalità accesso , PAR: 554.
Permette di configurare due modalità di accesso :
Facile
(default) vengono visualizzati solo i parametri principali
Esperto per utenti avanzati, vengono visualizzati tutti i parametri
01
02
03
04
05
MONITOR
INFORMAZIONI DRIVE
STARTUP GUIDATO
CONFIG DRIVE
LIFT
04 CONFIG DRIVE
u qx2
03/17
PAR:
04 CONFIG DRIVE
554
Modalità accesso
Facile
E
Valore: 0
03/17
PAR:
554
Modalità accesso
Esperto
Valore: 1
8.5.3 Startup display
Menu 04 CONFIG DRIVE, parametro 04.9 Visualizzaz iniziale, PAR : 574.
Consente di impostare il parametro che verrà visualizzato automaticamente all’accensione del Drive.
Inserendo il valore -1 (default), la funzione viene disabilitata e all’accensione viene presentato il menu principale.
8.5.4 Retroilluminazione display
Menu 04 Drive CONFIG, parametro 04.10 Illuminaz display, PAR : 576. Imposta l’illuminazione del display:
Acceso la luce del display rimane sempre accesa.
Spento (default) a luce si spegne dopo circa 3 minuti dalla pressione dell’ultimo tasto.
8.6 Allarmi
La pagina allarmi viene visualizzata automaticamente quando insorge un’allarme.
j
k
l
m
Allarme
RTN : 1/2
Sottotensione
Codice: 0000H0
Tempo: 27:45
(1) Allarme: identifca la pagina degli allarmi.
RTN : segnala che l’allarme è rientrato; se l’allarme è ancora attivo non compare niente.
x/y : x indica la posizione di questo allarme nella lista degli allarmi e y il numero di allarmi (l’allarme con x minore è
il più recente)
(2) Descrizione dell’allarme
(3) Sottocodice dell’allarme, fornisce una indicazione supplementare alla descrizione
(4) Istante dell’insorgenza dell’allarme in tempo macchina.
Con i tasti ▲ e ▼ si scorre la lista degli allarmi.
Nota ! Per ulteriori informazioni vedere il capitolo 10.1.
8.6.1 Reset degli allarmi
•
52
Se è visualizzata la pagina degli allarmi:
Premendo il tasto RST si esegue il reset degli allarmi ed si eliminano dall’elenco tutti gli allarmi che sono rientrati.
Se dopo questa operazioni l’elenco degli allarmi è vuoto, si chiude anche la pagina allarmi. Se l’elenco non è vuoto,
per uscire dalla pagina allarmi bisogna premere il tasto ►.
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
•
Se non è visualizzata la pagina degli allarmi:
Premendo il tasto RST si esegue il reset degli allarmi. Se dopo l’invio del reset ci sono ancora allarmi attivi, si apre
la pagina degli allarmi.
8.7 Messaggi
Con questa pagina vengono visualizzati dei messaggi per l’operatore.
I messaggi sono di due tipi :
- temporizzati (si chiudono automaticamente dopo un certo numero di secondi),
- fissi (rimangono visualizzati fno a quando l’operatore non preme il tasto ESC).
Più messaggi contemporanei vengono accodati e vengono presentati all’operatore in sequenza dal più recente.
j
k
l
m
Messaggio
01
Parametri di default
Codice: 0001H-1
Premere ESC x uscire
(1) Messaggio : identifica un messaggio.
xx indica quanti messaggi ci sono in coda. Possono essere al massimo 10 e quello col numero più alto è il più
recente.
(2) Descrizione del messaggio
(3) Sottocodice del messaggio. Fornisce un’indicazione supplementare alla descrizione.
(4) Compare “Premere ESC x uscire” se il messaggio richiede il riconoscimento.
Quando un messaggio si chiude, compare quello successivo fino allo svuotamento della coda.
Nota ! Per ulteriori informazioni vedere il capitolo 10.3.
8.8 Salvataggio e recupero nuove impostazione parametri
I parametri del Drive si possono salvare sul tastierino in 5 differenti aree di memoria. Questa funzione può essere utile
per avere disponibile diverse serie di parametri, per eseguire un backup di sicurezza o per trasferire i parametri da un
Drive ad un altro.
8.8.1 Selezione della memoria del tastierino
Nota !Questo esempio è visibile solo in modalità Esperto.
01
02
03
04
05
MONITOR
INFORMAZIONI DRIVE
STARTUP GUIDATO
CONFIG DRIVE
LIFT
04 CONFIG DRIVE
u x3
15/17
PAR:
04 CONFIG DRIVE
594
Sel memoria tastiera
Def:
1
1
E
15/17
PAR:
594
Sel memoria tastiera
0000000002
Def:
1
Menu 04 CONFIG DRIVE, parametro 04.19 Sel memoria tastiera, PAR : 594. Il tastierino possiede 5 aree di memoria
dedicate al salvataggio dei parametri.
La memoria da utilizzare si seleziona tramite il parametro Sel memoria tastiera. Le successive operazioni di salvataggio e recupero verranno eseguite sulla memoria selezionata.
8.8.2 Salvataggio dei parametri sul tastierino
01
02
03
04
05
MONITOR
INFORMAZIONI DRIVE
STARTUP GUIDATO
CONFIG DRIVE
LIFT
04 CONFIG DRIVE
u x5
13/17
PAR:
590
Salva par-> tastiera
Prem E per eseguire
E
Drive --> K2006-1
Menu 04 CONFIG DRIVE, parametro 04.17 Salva par->tastiera, PAR : 590. Serve per trasferire i parametri dal Drive
alla memoria selezionata del tastierino. Per avviare l’operazione si preme il tasto E.
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
53
Durante il trasferimento viene presentata una barra che indica la progressione dell’operazione.
Al posto della lettera X compare il numero della memoria del tastierino attualmente selezionata.
Alla fne del trasferimento, se si è concluso con esito positivo, compare la scritta “Eseguito” per qualche secondo, per
poi ritornare alla pagina iniziale.
Se durante il trasferimento si verifica un errore, viene presentato il messaggio:
Messaggio
01
Salv param fallito
Codice: XX
Premere ESC x uscire
Il codice XX indica il tipo di errore, vedere il paragrafo 10.3. Per uscire dal messaggio di errore si preme il tasto ESC.
8.8.3 Recupero dei parametri dal tastierino
Menu 04 CONFIG DRIVE, parametro 04.14 Caric par<- tastiera, PAR : 592. Serve per trasferire i parametri dalla
memoria selezionata del tastierino al Drive.
01
02
03
04
05
MONITOR
INFORMAZIONI DRIVE
STARTUP GUIDATO
CONFIG DRIVE
LIFT
04 CONFIG DRIVE
u x4
14/17
PAR:
592
E
Carica par->tastiera
Prem E per eseguire
Drive <-- K2006-1
Per avviare l’operazione si preme il tasto E. Durante il trasferimento viene presentata una barra che indica la progressione dell’operazione. Al posto della lettera X compare il numero della memoria del tastierino attualmente selezionata.
Alla fine del trasferimento, se si è concluso con esito positivo, compare la scritta “Eseguito” per qualche secondo, per
poi ritornare alla pagina iniziale.
Se durante il trasferimento si verifica un errore, viene presentato il messaggio:
Messaggio
01
Car param fallito
Codice: XX
Premere ESC x uscire
Il codice XX indica il tipo di errore, vedere il paragrafo 10.3. Per uscire dal messaggio di errore si preme il tasto ESC.
8.8.4 Trasferimento parametri tra Drive
Trasferire i parametri del Drive sorgente alla memoria del tastierino come indicato nel paragrafo 8.8.2, quindi collegare
il tastierino al Drive dove si vuole salvare la nuova impostazione e procedere come indicato nel paragrafo 8.8.3.
Attenzione!
Per prevenire possibile danneggiamenti alle apparecchiature è consigliato scollegare e collegare il tastierino con il
Drive spento.
8.9 Salvataggio e recupero nuove impostazione parametri su Memory card
Per salvare i parametri dal Drive alla memory card (SD-Secure Digital): Menu 04 CONFIG DRIVE, parametro 04.16
Salva par->card SD, PAR 596 :
01
02
03
04
05
MONITOR
INFORMAZIONI DRIVE
STARTUP GUIDATO
CONFIG DRIVE
LIFT
04 CONFIG DRIVE
ux2
16/17
PAR:
Salva par-> card SD
Salva par-> card SD
596
Salva par-> card SD
Prem E per eseguire
E
E
ADL_0000.DAT
...
OK
Per trasferire (recuperare) i parametri dalla memory card (SD-Secure Digital) al Drive: Menu 04 CONFIG DRIVE, parametro 04.17 Carica par<-card SD, PAR 598 :
01
02
03
04
05
54
MONITOR
INFORMAZIONI DRIVE
STARTUP GUIDATO
CONFIG DRIVE
LIFT
04 CONFIG DRIVE
u
17/17
PAR:
598
Carica par<-card SD
Prem E per eseguire
E
ADL_0000.DAT
...
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
ADL_0000.DAT
E
OK
9 - Messa in servizio da tastierino
Avvertenza!
I Drive a frequenza variabile sono apparecchiature elettriche per l’impiego in installazioni industriali. Parti del Drive sono in tensione
durante il funzionamento.
L’installazione elettrica e l’apertura del dispositivo possono essere eseguiti solo da personale qualificato. Installazioni non corrette di
motori oppure Drive possono danneggiare il dispositivo ed essere causa di ferimenti o danni materiali.
Oltre alla logica di protezione controllata dal software, il Drive non dispone di altra protezione contro la sovravelocità. Fare riferimento
alle istruzioni elencate in questo manuale ed osservare le normative di sicurezza locali e nazionali.
Collegare sempre il Drive alla messa a terra di protezione
(PE).
Il Drive ADL2.0 ed i filtri dell’Ingresso AC hanno una corrente di dispersione verso terra maggiore di 3,5 mA. La norma EN50178
specifica che in presenza di correnti di dispersione maggiori di 3,5 mA, il cavo di collegamento di terra ( ) deve essere di tipo fisso e
raddoppiato per ridondanza.
Sono consentiti solo collegamenti elettrici di ingresso permanenti a cavo. Mettere a massa l’apparecchio (IEC 536 Classe 1, NEC e
altre norme applicabili).
Qualora sia necessario utilizzare un dispositivo protettivo a corrente residua (RCD), scegliere un RCD di tipo B. Macchine con alimentazione trifase, dotate di filtri EMC, non devono essere connesse all’alimentazione tramite un ELCB (Earth Leakage Circuit-Breaker –
vedere DIN VDE 0160, sezione 5.5.2 ed EN50178 sezione 5.2.11.1).
Sui seguenti morsetti possono essere presenti tensioni pericolose anche se l’inverter è inattivo:
- morsetti di alimentazione L1, L2, L3, C1, C, D.
- morsetti del motore U, V, W.
Non utilizzare questo apparecchio come un “meccanismo di arresto di emergenza” (vedere EN 60204, 9.2.5.4).
Non toccare o danneggiare alcun componente durante l’utilizzo del dispositivo. Non è ammesso alterare le distanze di isolamento oppure la rimozione dell’isolamento e dei coperchi.
In conformità alla direttiva CEE il Drive ADL2.0 e gli accessori devono essere utilizzati solo dopo aver verificato che l’apparecchiatura è
stata prodotta utilizzando quei dispositivi di sicurezza richiesti dalla normativa 89/392/CEE relativa al settore dell’automazione. Queste
direttive non hanno alcuna applicazione nel continente americano ma devono essere rispettate in quelle attrezzature destinate al
continente europeo.
Configurare accuratamente i parametri del motore per garantire il corretto funzionamento della protezione da sovraccarico.
ADL2.0 funziona a tensioni elevate.
Quando si azionano dispositivi elettrici, è impossibile evitare di applicare tensioni pericolose ad alcune parti dell’apparecchio.
Prevedere ulteriori precauzioni esterne al Drive (ad esempio interruttori di fine corsa, interruttori meccanici, eccetera) o fornire funzioni
per garantire o applicare un funzionamento sicuro, nel momento in cui si verifica qualsiasi guasto nell’apparecchio di controllo tale che
possa provocare danni materiali notevoli o persino lesioni personali gravi (ad esempio, guasti potenzialmente pericolosi).
Alcune impostazioni di parametri possono provocare il riavvio automatico dell’inverter dopo un’interruzione dell’alimentazione.
Questo apparecchio è idoneo all’uso in un sistema di alimentazione in grado di erogare non oltre 10.000 ampère simmetrici (rms) per
una tensione massima di 480 V.
Non utilizzare questo apparecchio come un “meccanismo di arresto di emergenza” (vedere EN 60204, 9.2.5.4).
Non aprire il dispositivo oppure i coperchi mentre la rete è alimentata. Il tempo di attesa minimo prima di poter agire sui morsetti oppure all’interno del dispositivo è indicato nel capitolo 4.6.
Pericolo di Incendio e di Esplosione:
L’installazione dei Drive in aree a rischio, dove siano presenti sostanze infiammabili o vapori combustibili o polveri, può causare
incendi o esplosioni. I Drive devono essere installati lontano da queste aree a rischio anche se vengono utilizzati con motori adatti per
l’impiego in queste condizioni.
Proteggere l’apparecchio da sollecitazioni ambientali non consentite (temperatura, umidità, colpi, ecc.) .
Attenzione!
All’uscita del Drive (morsetti U, V, W):
- non può essere applicata tensione.
- non è consentito inserire in parallelo più Drive
- non è ammesso il collegamento diretto degli ingressi e delle uscite (bypass)
- non possono essere collegati carichi capacitivi (es. condensatori di rifasamento).
La messa in servizio elettrica deve essere effettuata da personale qualificato. Questo è responsabile del fatto che esista un adeguato
collegamento di terra ed una protezione dei cavi di alimentazione secondo le prescrizioni locali e nazionali. Il motore deve essere
protetto contro il sovraccarico.
Non collegare tensioni d’alimentazione che eccedano il campo di tensione ammesso. Se vengono applicate tensioni eccessive al
Drive, i suoi componenti interni ne verranno danneggiati.
Non è consentito il funzionamento del Drive senza il collegamento di messa a terra. Per evitare disturbi, la carcassa del motore deve
essere messa a terra attraverso un connettore di terra separato dai connettori di terra delle altre apparecchiature.
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
55
Non devono essere eseguite prove di rigidità dielettrica su parti del Drive. Per la misura delle tensioni dei segnali devono essere utilizzati strumenti di misurazione appropriati (resistenza interna minima 10 kΩ/V).
9.1 Avviamento guidato motore asincrono
ADL2.0-...-AC4 può funzionare con le modalità di regolazione: Tensione/Frequenza (SSC), vettoriale Sensorless (anello aperto) e vettoriale ad orientamento di campo (anello chiuso).
Nota!Prima di procedere verificare impostazione di fabbrica:
Menu 02 INFORMAZIONI DRIVE, parametro 02.1 Serie Drive, PAR: 482, default=3.
01
02
03
04
05
MONITOR
INFORMAZIONI DRIVE
STARTUP GUIDATO
CONFIG DRIVE
LIFT
02 INFORMAZIONI DRIVE
u
1/25
PAR:
Serie Drive
Valore: 3
480
3
Menu 04 CONFIG DRIVE, parametro 04.2 Modalità regolazione, PAR: 552, default=Controllo SSC
01
02
03
04
05
MONITOR
INFORMAZIONI DRIVE
STARTUP GUIDATO
CONFIG DRIVE
LIFT
04 CONFIG DRIVE
u qx1
2/17
PAR:
552
Modalità regolazione
Controllo SSC
Valore: 0
Lo STARTUP GUIDATO è una procedura che serve ad eseguire rapidamente la messa in funzione del Drive, aiutando
ad impostare i parametri principali.
È composto da una serie di domande, corrispondenti alla varie sequenze relative all’inserimento ed al calcolo dei parametri necessari al corretto funzionamento del Drive e dell’applicazione lift. L’ordine di tali sequenze è la seguente:
●● Collegamenti elettrici Vedere passo 1
●● Impostazione dati motore
Vedere passo 2
●● Autoapprendimento a motore fermo o accoppiato al carico
Vedere passo 3
●● Impostazione parametri encoder (nel caso di Modalità regolazione=Vett flusso CL)
Vedere passo 4
●● Impostazione valore massimo riferimento di velocità e massima velocità impianto Vedere passo 6
●● Impostazione peso del sistema
Vedere passo 7
●● Impostazione parametri dell’applicazione
Vedere passo 8
●● Salvataggio parametri
Vedere passo 9
Il formato della pagina per la selezione delle funzioni è il seguente:
01
02
03
04
05
MONITOR
INFORMAZIONI DRIVE
STARTUP GUIDATO
CONFIG DRIVE
LIFT
03 STARTUP GUIDATO
u
Impost param motore?
E=Si
Giù=Prossimo
Premendo il tasto E si entra nella funzione che si vuole programmare.
Premendo il tasto ▼ (Giù) si passa alla funzione successiva saltando quella attuale.
Premendo il tasto ▲ (Su) si torna alla funzione precedente.
Per terminare la sequenza di funzioni e tornare al menu, premere il tasto ESC.
La fine della sequenza di messa in servizio viene indicata con la pagina:
03 STARTUP GUIDATO
Fine sequenza !
Su=Ind
Giù=Uscita
Premendo il tasto ▼(Down) si esce dalla sequenza e si torna al menu.
56
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
Passo 1 - Collegamenti elettrici
Eseguire i collegamenti come indicato nel paragrafo 7.4.2.
Verifiche da effettuare prima di alimentare il Drive
• Verificare che la tensione di alimentazione abbia il corretto valore e che i morsetti d’ingresso del Drive (L1, L2 e
L3) siano collegati in modo corretto.
•
Verificare che i morsetti d’uscita del Drive (U, V e W) siano collegati al motore in modo corretto.
•
Verificare che tutti i morsetti del circuito di controllo del Drive siano collegati correttamente. Controllare che tutti gli
ingressi di controllo siano aperti.
Alimentazione del Drive
• Una volta eseguite le suddette verifiche, applicare l’alimentazione al Drive e proseguire la procedura eseguendo il
passo 2.
Passo 2 – Impostazione dati motore
Nota !Def: Il dato di fabbrica (default) dipende dalla taglia del Drive collegato, questi valori si riferiscono alla taglia ADL..-1055-AC
03 STARTUP GUIDATO
SEQ
SEQ
01
E
Impost param motore?
E=Si
Tensione nominale
Def:
Giù=Prossimo
PAR: 2000
400 V
400
01
E
q
PAR: 2002
Corrente nominale
11.8 A
02
E
PAR: 2004
Velocità nominale
1450 rpm
1450
PAR: 2006
Frequenza nominale
50
50 Hz
2
2
q
5.50 kW
2008
2
2
06
E
PAR:
2010
Potenza nominale
0000005.50 kW
Def:
5.50
5.50
SEQ
PAR: 2012
Cos phi nominale
Def:
PAR:
SEQ
SEQ
07
50
Coppie polari
Def:
PAR: 2010
Potenza nominale
Def:
2006
000000050 Hz
05
E
SEQ
q
PAR:
Frequenza nominale
Def:
PAR: 2008
Coppie polari
06
2004
SEQ
05
Def:
PAR:
Velocità nominale
0000001450 rpm
Def: 1450
04
E
SEQ
q
11.8
SEQ
04
Def:
00000011.8 A
03
E
SEQ
q
2002
SEQ
03
Def:
PAR:
Corrente nominale
Def:
11.8
SEQ
q
400
SEQ
02
Def:
2000
000000400 v
Def:
SEQ
PAR:
Tensione nominale
0.83
0.83
07
E
PAR: 2012
Cos phi nominale
Def:
0.83
0.83
▲
401 v
▼
399 v
▲
11.9 A
▼
11.7 A
▲ 1451
rpm
▼ 1449
rpm
▲
51 Hz
▼
49 Hz
▲
3
▼
1
▲
5.51 kW
▼
5.49 kW
▲
0.84
▼
0.82
E
E
E
E
E
E
E
Impostare i dati di targa in funzione del tipo di motore collegato, seguendo le procedure illustrate nelle pagine precedenti.
Tensione nominale [V] : tensione nominale del motore rilevata sulla targhetta.
Corrente nominale [A] : corrente nominale del motore; approssimativamente il valore non dovrebbe essere inferiore a 0,3 volte la corrente nominale del Drive,
corrente d’uscita classe 1 @ 400V sulla targa del Drive.
Velocità nominale [rpm] : velocità nominale del motore; il valore deve rispecchiare la velocità del motore a pieno carico con frequenza nominale. Se lo scorrimento è
disponibile sulla targa motore, impostare il parametro Velocità nominale come segue: Velocità nominale = Velocità sincrona – Scorrimento
(ad esempio per un motore 4 poli Velocità nominale = 1500 – 70 = 1430).
Frequenza nominale [Hz]: frequenza nominale del motore, rilevata dalla targhetta (solo motori asincroni).
Coppie polari: Numero di coppie polari del motore. Partendo dai dati di targa, il numero di coppie polari del motore è calcolato applicando la formula: P = 60 [s] x f [Hz] / nN [rpm]
Dove: P = coppie polari motore, f = frequenza nominale del motore (es. 50); nN = velocità nominale del motore (es. 1450)
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
57
Potenza nominale [kW] : Potenza nominale del motore; per una targa motore con valore di potenza HP, impostare la potenza nominale kW = 0,736 x valore Hp di
potenza del motore.
Cos phi nominale : Fattore di potenza del motore; lasciare il valore di default di Cos φ se i dati non sono disponibili dalla targa
Nota !Alla fine dell’inserimento dei dati viene eseguito automaticamente il comando Acquisiz parametri (menù 14 DATI MOTORE, PAR: 2020). I dati del motore
inseriti durante la procedura di STARTUP GUIDATO vengono memorizzati in una memoria ram per consentire al Drive di eseguire i calcoli necessari al funzionamento.
In caso di spegnimento dell’apparecchio tali dati verranno persi. Per effettuare il salvataggio dei dati motore seguire la procedura indicata nel passo 9.
Al termine della procedura passare al passo 3
Passo 3 – Autoapprendimento a motore fermo o accoppiato al carico
Il Drive esegue la procedura di autotaratura del motore (reale misurazione del parametri del motore).
Esistono due modalità di esecuzione dell’autoapprendimento: Ridotto (default) e Completo, selezionabili con il
parametro 2026 Modalità selftune. La procedura ridotta è rapida e consigliata nella maggior parte dei casi, mentre la
modalità completa permette di ottenere il massimo delle prestazioni, ma può durare diversi minuti
Nota !Nel caso l’operazione generi un messaggio d’errore (esempio Error code 1), controllare i collegamenti dei circuti di potenza e controllo (vedere il passo 1 -
Collegamenti), controllare l’impostazione dei dati motore (vedere passo 2 - Impostazione dati motore) e infine ripetere la procedura di Autoapprendimento
guidato.
03 STARTUP GUIDATO
SEQ
01
Avvia autot statica
E=Si
E
Autoapprendimento
Self tune statico
Prem E per eseguire
E
Avanzamento
0%
Chiudere ingr Enable
Avanzamento
10%
Premi ESC per term.
Giù=Prossimo
(1)
(2)
Autoapprendimento
Avanzamento
100%
Aprire ingr Enable
Autoapprendimento
PAR: 2024
(3)
(4)
Autoapprendimento
Eseguito
(5)
(1) Premere il tasto E per passare alla procedura di autoapprendimento.
(2) Premere il tasto E per iniziare l’autoapprendimento.
(3) Abilitare il Drive collegando il morsetto 9 della scheda di I/O (Enable) al morsetto 12 (+24V). L’operazione può
essere interrotta premendo il tasto ESC.
(4) Una volta che il Drive è abilitato inizia la procedura di autoapprendimento che può durare, in relazione al tipo di motore utilizzato, anche qualche minuto.
(5) Al termine della procedura appare la schermata indicata. Aperto il contatto di Enable passare al passo 4 (nel caso
di utilizzo di una scheda di retroazione) o 5 per proseguire con la procedura.
Nota !Per concludere la procedura di autoapprendimento viene richiesta l’apertura del contatto di Enable (morsetti 9 – 12); in questo modo viene eseguito automaticamente il comando Acq parametri autot (menù 14 DATI MOTORE, PAR: 2078).
I parametri calcolati vengono memorizzati in una memoria ram per consentire al Drive di eseguire i calcoli necessari al funzionamento. In caso di spegnimento
dell’apparecchio tali dati verranno persi. Per effettuare il salvataggio dei dati motore seguire la procedura indicata al passo 6.
Passo 4 – Impostazione parametri encoder (solo se installata una scheda di retroazione)
Attenzione!
L'impostazione errata della tensione encoder può danneggiare irreparabilmente il dispositivo, verificare il valore di
targa dell'encoder.
Se il Drive deve essere utilizzato in modalità Closed Loop è necessario verificare che sia installata una scheda di
retroazione encoder (standard EXP-DE-I1R1F2-ADL); eseguire i collegamenti come indicato nel paragrafo 7.2.3 ed
impostare i seguenti parametri relativi all’eventuale encoder montato sul motore:
58
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
03 STARTUP GUIDATO
SEQ
SEQ
01
Imp param encoder?
E=Si
E
Impulsi encoder
Def:
Giù=Prossimo
PAR: 2100
1024 ppr
01
E
SEQ
q
1024
SEQ
02
PAR: 2102
Alimentazione encoder
Def:
2100
000001024 ppr
Def:
1024
PAR:
Impulsi encoder
5.2 V
5.2
02
E
PAR:
2102
Alimentazione encoder
0000005.2 V
Def:
5.2
▲ 1025
ppr
▼ 1023
ppr
▲
5.3 A
▼
5.1 A
E
E
Passo 5 - Fasatura encoder
Non disponibile in questa modalità.
Passo 6 – Impostazione valore massimo riferimento di velocità e velocità impianto
Impostazione valore massimo del riferimento di velocità: viene definito il valore massimo della velocità motore (in rpm),
raggiungibile con ogni singolo segnale di riferimento (analogico o digitale).
03 STARTUP GUIDATO
SEQ
SEQ
01
Imp max velocità?
E=Si
E
Fondo scala velocità
Def:
Giù=Prossimo
PAR: 680
1440 rpm
01
E
680
000001440 rpm
Def:
1440
PAR:
Fondo scala velocità
1440
▲ 1441
rpm
▼ 1439
rpm
E
Impostare la massima velocità dell’impianto in m/s
03 STARTUP GUIDATO
SEQ
SEQ
01
Imp max veloc car?
E=Si
E
Velocità impianto
Def:
Giù=Prossimo
PAR: 11006
1.0
1.0 m/s
01
E
PAR:
11006
Velocità impianto
0000001.0 m/s
Def:
1.0
▲
1.1 m/s
▼
0.9 m/s
E
Una volta impostata la velocità dell’impianto passare al passo 7 per l’impostazione del peso del sistema.
Nota!
Il dato di fabbrica (default) dipende dalla taglia del Drive collegato, questi valori si riferiscono alla taglia ADL..-1055-AC
Passo 7 – Impostazione peso del sistema
In questa fase dell’avviamento guidato viene richiesta l’immissione dei pesi relativi al sistema.
03 STARTUP GUIDATO
SEQ
SEQ
01
Imp peso sistema ?
E=Si
E
Peso della cabina
Def:
Giù=Prossimo
PAR: 11150
0
0 kg
01
E
q
PAR: 11152
Peso contrappeso
0
0 kg
02
E
PAR: 11154
Peso carico massimo
0
0
0 kg
PAR:
11154
Peso carico massimo
000000000 kg
Def:
0
SEQ
04
PAR: 11156
Peso fune
Def:
000000000 kg
03
E
SEQ
q
11152
SEQ
03
Def:
PAR:
Peso contrappeso
Def:
SEQ
q
0
SEQ
02
Def:
11150
000000000 kg
Def:
SEQ
PAR:
Peso della cabina
0
0 kg
04
E
PAR:
Peso fune
11156
000000000 kg
Def:
0
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
▲
1 kg
▼
0 kg
▲
1 kg
▼
0 kg
▲
1 kg
▼
0 kg
▲
1 kg
▼
0 kg
E
E
E
E
59
SEQ
q
SEQ
05
PAR: 11158
Inerzia riduttore
Def:
0
0 kgm²
▼
0 kgm²
11160
▲
1 kgm²
000000000 kgm²
▼
0 kgm²
▲
rpm
▼
m/s
▲
6 Hz
▼
4 Hz
▲
46 Hz
▼
44 Hz
▲
21 Hz
▼
19 Hz
▲
1 Hz
▼
0 Hz
▲
1 Hz
▼
0 Hz
11158
000000000 kgm²
0
SEQ
06
PAR: 11160
Inerzia motore
Def:
1 kgm²
PAR:
Inerzia riduttore
Def:
SEQ
q
▲
05
E
0
0 kgm²
06
E
PAR:
Inerzia motore
Def:
0
E
E
Terminata l’impostazione delle grandezze meccaniche passare al passo successivo.
Passo 8 – Impostazione parametri dell’applicazione
In questo fase è possibile inserire i dati dell’applicazione.
●●
Impostare i valori della Multivelocità
03 STARTUP GUIDATO
SEQ
SEQ
01
Imp param applicaz?
E=Si
E
Giù=Prossimo
PAR: 11012
Unità mis velocità
Hz
Def: 0
01
E
q
PAR: 11020
Multivelocità 0
5
5 Hz
PAR: 11022
Multivelocità 1
45
45 Hz
03
E
PAR: 11024
Multivelocità 2
20
20 Hz
●●
PAR:
11024
000000020 Hz
20
0
0 Hz
05
E
PAR:
11026
Multivelocità 3
000000000 Hz
Def:
0
SEQ
06
PAR: 11028
Multivelocità 4
0
0 Hz
06
E
PAR:
11028
Multivelocità 4
000000000 Hz
Def:
0
E
E
E
E
E
E
Impostare i valori delle Rampe
SEQ
q
SEQ
07
PAR: 11040
Jerk iniziale acc
Def:
0.5
0.5 m/s³
q
m/s³
▼ 0.4
m/s³
11042
▲ 0.7
m/s²
00000000.6 m/s²
▼ 0.5
m/s²
PAR:
11040
Jerk iniziale acc
00000000.5 m/s³
Def:
0.5
SEQ
08
PAR: 11042
Accelerazione
Def:
▲ 0.6
07
E
SEQ
60
45
Multivelocità 2
Def:
PAR: 11026
Multivelocità 3
Def:
000000045 Hz
04
E
SEQ
q
11022
SEQ
05
Def:
PAR:
Multivelocità 1
Def:
SEQ
q
5
SEQ
04
Def:
11020
000000005 Hz
Def:
SEQ
q
PAR:
Multivelocità 0
SEQ
03
Def:
0
02
E
SEQ
q
11012
SEQ
02
Def:
Hz
Def:
SEQ
PAR:
Unità mis velocità
0.6
0.6 m/s²
08
E
PAR:
Accelerazione
Def:
0.6
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
E
E
SEQ
q
SEQ
09
PAR: 11044
Jerk finale acc
Def:
1.4
1.4 m/s³
PAR: 11046
Jerk iniziale dec
1.4
1.4 m/s³
PAR: 11048
Decelerazione
0.6
0.6 m/s²
●●
▼ 1.4
m/s³
11048
▲ 0.7
m/s²
00000000.6 m/s²
▼ 0.5
m/s²
11050
▲ 0.6
m/s³
00000000.5 m/s³
▼ 0.4
m/s³
11052
▲ 0.8
m/s²
00000000.7 m/s²
▼ 0.6
m/s³
11046
00000001.4 m/s³
1.4
PAR:
Decelerazione
Def:
PAR: 11050
Jerk finale dec
0.5
0.6
0.5 m/s³
12
E
PAR:
Jerk finale dec
Def:
0.5
SEQ
13
PAR: 11052
Decel fermata
Def:
m/s³
PAR:
Jerk iniziale dec
11
E
SEQ
q
▲ 1.5
1.4
SEQ
12
Def:
m/s³
Def:
SEQ
q
▼ 1.4
SEQ
11
Def:
00000001.4 m/s³
10
E
SEQ
q
m/s³
SEQ
10
Def:
▲ 1.5
PAR:
Jerk finale acc
Def:
SEQ
q
11044
09
E
0.7
0.7 m/s²
13
E
PAR:
Decel fermata
Def:
0.7
E
E
E
E
E
Impostare i valori delle Distanze
SEQ
q
SEQ
14
PAR: 11104
Distanza multivel 1
Def:
0
0m
q
Spento
▲
Acceso
Spento
▼
Acceso
PAR:
▲
0.121 m
▼
0.119 m
0
PAR:
11130
Arrivo diretto
SEQ
PAR: 11132
Zona arrivo diretto
Def:
0 m
000000000 m
15
E
SEQ
q
▼
11104
SEQ
PAR: 11130
Arrivo diretto
16
1 m
PAR:
Distanza multivel 1
Def:
SEQ
15
▲
14
E
0.120 m
16
E
0.120
11132
Zona arrivo diretto
000000.120 m
Def:
0.120
E
E
E
A questo punto procedere con il passo 9 per salvare i parametri dell’impianto inseriti e quelli che il Drive ha calcolato
con le procedure di autoapprendimento e auto fasatura.
Passo 9 – Salvataggio parametri
Per salvare le nuove impostazioni dei parametri, in modo che vengano mantenute anche allo spegnimento, eseguire
questa procedura:
03 STARTUP GUIDATO
SEQ
01
Salva parametri?
E=Si
E
SEQ
PAR: 550
Salva parametri?
Prem E per eseguire
01
E
03 STARTUP GUIDATO
PAR: 550
Salva parametri?
Eseguito
Giù=Prossimo
Fine sequenza
Su=Ind.
(1)
(2)
(3)
Giù=Uscita
(4)
(1) Premere il tasto E per iniziare la procedura di salvataggio parametri
(2) Confermare con il tasto E
(3) Conclusione della procedura
(4) Terminato correttamente il salvataggio dei parametri il Drive propone questa schermata a conclusione della procedura di avviamento guidato.
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
61
Verifica finale
Nota!Se si vuole utilizzare il valore di inerzia calcolata dal drive, copiare il valore del parametro 5.4.20 CalcInertia (PAR 12020, Menu LIFT/ MECHANICAL DATA)
nel parametro 16.20 Inerzia, PAR: 2240.
Menu 5.4 DATI MECCANICI, parametro 5.4.20 InerziaCalcolata, PAR: 12020, default=(S).
01
02
03
04
05
MONITOR
INFORMAZIONI DRIVE
STARTUP GUIDATO
CONFIG DRIVE
LIFT
uqx3
5.1
5.2
5.3
5.4
5.5
VELOCITA'
RAMPE
SEQUENZE
DATI MECCANICI
DISTANZE
5.4 DATI MECCANICI
u
12/12
PAR:
12020
InerziaCalcolata
4.11 kgm2
Menu 16 GUAD REG VELOCITA', parametro 16.20 Inerzia, PAR: 2240, default=(S).
14
15
16
17
18
DATI MOTORE
CONFIG ENCODER
GUAD REG VELOCITA’
PARAM REGOLATORI
CONFIG COPPIA
16 GUAD REG VELOCITA’
ux2
20/21
PAR:
2240
Inerzia
Def:
4.11 kgm2
4.110
Prima di fare girare il motore verificare ed eventualmente modificare l'impostazione della modalità di regolazione.
Selezioni disponibili:
0 Controllo SSC
1 Vett Flusso OL
2 Vett Flusso CL
Menu 04 CONFIG DRIVE, parametro 04.2 Modalità regolazione, PAR: 552, default= Controllo SSC
01
02
03
04
05
62
MONITOR
INFORMAZIONI DRIVE
STARTUP GUIDATO
CONFIG DRIVE
LIFT
04 CONFIG DRIVE
u qx2
2/17
PAR:
552
Modalità regolazione
Controllo SSC
Valore: Controllo SSC
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
9.2 Avviamento guidato per motori brushless
ADL2...-...-BR può funzionare con le modalità di regolazione: vettoriale ad orientamento di campo per il controllo di
motori sincroni a magneti permanenti (brushless).
Nota!Prima di procedere verificare l'impostazione di fabbrica:
Menu 02 INFORMAZIONI DRIVE, parametro 02.1 Serie Drive, PAR: 482, default=4.
01
02
03
04
05
MONITOR
INFORMAZIONI DRIVE
STARTUP GUIDATO
CONFIG DRIVE
LIFT
02 INFORMAZIONI DRIVE
u
1/25
PAR:
Serie Drive
480
4
Menu 04 CONFIG DRIVE, parametro 04.2 Modalità regolazione, PAR: 552, default=Vett flusso CL.
01
02
03
04
05
MONITOR
INFORMAZIONI DRIVE
STARTUP GUIDATO
CONFIG DRIVE
LIFT
04 CONFIG DRIVE
u qx1
2/17
PAR:
552
Modalità regolazione
Vett flusso CL
Valore: 2
Lo STARTUP GUIDATO è una procedura che serve ad eseguire rapidamente la messa in funzione del Drive, aiutando
ad impostare i parametri principali.
È composto da una serie di domande, corrispondenti alla varie sequenze relative all’inserimento ed al calcolo dei parametri necessari al corretto funzionamento del Drive e dell’applicazione lift. L’ordine di tali sequenze è la seguente:
●● Collegamenti elettrici Vedere passo 1
●● Impostazione dati motore
Vedere passo 2
●● Autoapprendimento a motore fermo o accoppiato al carico
Vedere passo 3
●● Impostazione parametri encoder
Vedere passo 4
●● Fasatura encoder
Vedere passo 5
●● Impostazione valore massimo riferimento di velocità e massima velocità impianto Vedere passo 6
●● Impostazione peso del sistema
Vedere passo 7
●● Impostazione parametri dell’applicazione
Vedere passo 8
●● Salvataggio parametri
Vedere passo 9
Il formato della pagina per la selezione delle funzioni è il seguente:
01
02
03
04
05
MONITOR
INFORMAZIONI DRIVE
STARTUP GUIDATO
CONFIG DRIVE
LIFT
03 STARTUP GUIDATO
u
Impost param motore?
E=Si
Giù=Prossimo
Premendo il tasto E si entra nella funzione che si vuole programmare.
Premendo il tasto ▼ (Giù) si passa alla funzione successiva saltando quella attuale.
Premendo il tasto ▲ (Su) si torna alla funzione precedente.
Per terminare la sequenza di funzioni e tornare al menu, premere il tasto ESC.
La fine della sequenza di messa in servizio viene indicata con la pagina:
03 STARTUP GUIDATO
Fine sequenza !
Su=Ind
Giù=Uscita
Premendo il tasto ▼(Down) si esce dalla sequenza e si torna al menu.
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
63
Passo 1 - Collegamenti elettrici
Eseguire i collegamenti come indicato nel paragrafo 7.4.2.
Verifiche da effettuare prima di alimentare il Drive
• Verificare che la tensione di alimentazione abbia il corretto valore e che i morsetti d’ingresso del Drive (L1, L2 e
L3) siano collegati in modo corretto.
•
Verificare che i morsetti d’uscita del Drive (U, V e W) siano collegati al motore in modo corretto.
•
Verificare che tutti i morsetti del circuito di controllo del Drive siano collegati correttamente. Controllare che tutti gli
ingressi di controllo siano aperti.
•
Controllare i colegamenti dell'encoder, vedere Appendice sezione A.3.
Alimentazione del Drive
• Una volta eseguite le suddette verifiche, applicare l’alimentazione al Drive e proseguire la procedura eseguendo il
passo 2.
Passo 2 – Impostazione dati motore
Nota !Def: Il dato di fabbrica (default) dipende dalla taglia del Drive collegato, questi valori si riferiscono alla taglia ADL..-1055-BR
03 STARTUP GUIDATO
SEQ
SEQ
01
Impost param motore?
E=Si
E
340 V
340
01
E
Tensione nominale
Def:
Giù=Prossimo
PAR: 2000
q
PAR: 2002
02
E
Corrente nominale
11.0 A
PAR: 2004
PAR: 2008
12
12
q
50.00 Nm/A
12
05
E
2008
12
PAR:
2010
Costante di coppia
0000050.00 Nm/A
Def:
50.00
50.00
SEQ
PAR: 2012
Costante EMF
Def:
PAR:
SEQ
PAR: 2010
SEQ
06
2004
Coppie polari
Def:
Costante di coppia
Def:
PAR:
Velocità nominale
0000000095 rpm
Def: 95
04
E
Coppie polari
SEQ
q
11.0
SEQ
04
05
00000011.0 A
03
E
Velocità nominale
95 rpm
Def: 95
Def:
2002
SEQ
03
SEQ
q
PAR:
Corrente nominale
Def:
11.0
SEQ
q
340
SEQ
02
Def:
2000
000000340 v
Def:
SEQ
PAR:
Tensione nominale
28.87
28.87
Wb
06
E
PAR: 2012
Costante EMF
Def:
28.87 Wb
28.87
▲
341 v
▼
339 v
▲
11.1 A
▼
10.9 A
▲
96 rpm
▼
94 rpm
▲
13
▼
11
E
E
E
E
▲ 50.01Nm/A
▼ 49.99Nm/A
▲ 28.88
Wb
▼ 28.86
Wb
E
E
Impostare i dati di targa in funzione del tipo di motore collegato, seguendo le procedure illustrate nelle pagine precedenti.
Tensione nominale [V] : tensione nominale del motore rilevata sulla targhetta.
Corrente nominale [A] : corrente nominale del motore; approssimativamente il valore non dovrebbe essere inferiore a 0,3 volte la corrente nominale del Drive,
corrente d’uscita classe 1 @ 400V sulla targa del Drive.
Velocità nominale [rpm] : velocità nominale del motore; vedere dato di targa.
Coppie polari : Numero di coppie polari del motore; vedere dato di targa.
Costante di coppia (KT) : (KT) Rapporto tra la coppia sviluppata dal motore e la corrente necessaria per fornirla.
Costante EMF : Nota !
(KE = KT / √3) Costante di forza contro elettromotrice, che rappresenta il rapporto tra la tensione del motore e la sua velocità nominale.
Alla fine dell’inserimento dei dati viene eseguito automaticamente il comando Acquisiz parametri (menù 14 DATI MOTORE, PAR: 2020). I dati del motore inseriti
durante la procedura di STARTUP GUIDATO vengono memorizzati in una memoria ram per consentire al Drive di eseguire i calcoli necessari al funzionamento.
In caso di spegnimento dell’apparecchio tali dati verranno persi. Per effettuare il salvataggio dei dati motore seguire la procedura indicata nel passo 9.
Al termine della procedura passare al passo 3
64
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
Passo 3 – Autoapprendimento a motore fermo o accoppiato al carico
Il Drive esegue la procedura di autotaratura del motore (reale misurazione del parametri del motore).
L’autotaratura può durare qualche minuto.
Nota !Nel caso l’operazione generi un messaggio d’errore (esempio Error code 1), controllare i collegamenti dei circuti di potenza e controllo (vedere il passo 1 -
Collegamenti), controllare l’impostazione dei dati motore (vedere passo 2 - Impostazione dati motore) e infine ripetere la procedura di Autoapprendimento
guidato.
03 STARTUP GUIDATO
SEQ
01
Avvia autot statica
E=Si
E
Selftune statico
Prem E per eseguire
Autoapprendimento
E
Avanzamento
0%
Chiudere ingr Enable
Avanzamento
10%
Premi ESC per term.
Giù=Prossimo
(1)
(2)
Autoapprendimento
Avanzamento
100%
Aprire ingr Enable
Autoapprendimento
PAR: 2024
(3)
(4)
Autoapprendimento
Eseguito
(5)
(1) Premere il tasto E per passare alla procedura di autoapprendimento.
(2) Premere il tasto E per iniziare l’autoapprendimento.
(3) Abilitare il Drive collegando il morsetto 9 della scheda di I/O (Enable) al morsetto 12 (+24V). L’operazione può
essere interrotta premendo il tasto ESC.
(4) Una volta che il Drive è abilitato inizia la procedura di autoapprendimento che può durare, in relazione al tipo di motore utilizzato, anche qualche minuto.
(5) Al termine della procedura appare la schermata indicata. Aperto il contatto di Enable, passare al passo 4.
Nota !Per concludere la procedura di autoapprendimento viene richiesta l’apertura del contatto di Enable (morsetti 9 – 12); in questo modo viene eseguito automaticamente il comando Acq parametri autot (menù 14 DATI MOTORE, PAR: 2078).
I parametri calcolati vengono memorizzati in una memoria ram per consentire al Drive di eseguire i calcoli necessari al funzionamento. In caso di spegnimento
dell’apparecchio tali dati verranno persi. Per effettuare il salvataggio dei dati motore seguire la procedura indicata al passo 9.
Passo 4 – Impostazione parametri encoder (Scheda standard EXP-SESC-I1R1F2-ADL)
Attenzione!
L'impostazione errata della tensione encoder può danneggiare irreparabilmente il dispositivo, verificare il valore di
targa dell'encoder.
03 STARTUP GUIDATO
SEQ
SEQ
01
Imp param encoder?
E=Si
E
Risoluzione encoder
Def:
Giù=Prossimo
PAR: 2100
2048 ppr
01
E
SEQ
q
2048
SEQ
02
PAR: 2102
Alimentazione encoder
Def:
2100
000002048 ppr
Def:
2048
PAR:
Risoluzione encoder
5.2
5.2 V
02
E
PAR:
2102
Alimentazione encoder
0000005.2 V
Def:
5.2
▲ 2049
ppr
▼ 2047
ppr
▲
5.3 A
▼
5.1 A
E
E
Passo 5 – Impostazione parametri encoder (Scheda standard EXP-SESC-I1R1F2-ADL)
Sui Drive ADL230 è disponibile un comando per avviare la fasatura automatica dell’encoder assoluto (il freno deve
essere bloccato).
La fasatura deve essere ripetuta tutte le volte che:
- si sostituisce il Drive (in alternativa eseguire download parametri prelevati dal Drive precedente)
- si sostituisce il motore
- si sostituisce l'encoder
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
65
Nota !Per ulteriori informazioni vedere i parametri 15.15 PAR 2190 Autofasatura rotaz e 15.16 PAR 2192 Autofasatura statica nel manuale Descrizione delle
funzioni e lista parametri (ADL200 Inverter vettoriale per ascensori con motori sincroni).
Per ulteriori informazioni vedere Appendice, sezione A.3.2 Fasatura.
03 STARTUP GUIDATO
SEQ
01
Avvio fasat statica?
E=Si
E
Autoapprendimento
Autoapprendimento
Avanzamento
0%
Chiudere ingr Enable
Avanzamento
10%
Premi ESC per term.
PAR: 2024
Autofasatura statica
Prem E per eseguire
E
Giù=Prossimo
(1)
(2)
Autoapprendimento
Avanzamento
100%
Aprire ingr Enable
(3)
(4)
Autoapprendimento
Eseguito
Passo 6 – Impostazione valore massimo riferimento di velocità e velocità impianto
Impostazione valore massimo del riferimento di velocità: viene definito il valore massimo della velocità motore (in rpm),
raggiungibile con ogni singolo segnale di riferimento (analogico o digitale).
03 STARTUP GUIDATO
SEQ
SEQ
01
Imp max velocità?
E=Si
E
Fondo scala velocità
Def:
Giù=Prossimo
PAR: 680
120
120 rpm
01
E
PAR:
680
Fondo scala velocità
000000120 rpm
Def:
120
▲
121 rpm
▼
119 rpm
▲
1.1 m/s
▼
0.9 m/s
E
Impostare la massima velocità dell’impianto in m/s
03 STARTUP GUIDATO
SEQ
SEQ
01
Imp max veloc car?
E=Si
E
Velocità impianto
Def:
Giù=Prossimo
PAR: 11006
1.0
1.0 m/s
01
E
PAR:
11006
Velocità impianto
0000001.0 m/s
Def:
1.0
E
Una volta impostata la velocità dell’impianto passare al passo 7 per l’impostazione del peso del sistema.
Nota!
Il dato di fabbrica (default) dipende dalla taglia del Drive collegato, questi valori si riferiscono alla taglia ADL..-1055-BR
Passo 7 – Impostazione peso del sistema
In questa fase dell’avviamento guidato viene richiesta l’immissione dei pesi relativi al sistema.
03 STARTUP GUIDATO
SEQ
SEQ
01
Imp peso sistema ?
E=Si
E
Peso della cabina
Def:
Giù=Prossimo
PAR: 11150
0
0 kg
01
E
q
PAR: 11152
Peso contrappeso
0
0 kg
02
E
PAR: 11154
Peso carico massimo
0
66
0
0 kg
PAR:
11154
Peso carico massimo
000000000 kg
Def:
0
SEQ
04
PAR: 11156
Peso fune
Def:
000000000 kg
03
E
SEQ
q
11152
SEQ
03
Def:
PAR:
Peso contrappeso
Def:
SEQ
q
0
SEQ
02
Def:
11150
000000000 kg
Def:
SEQ
PAR:
Peso della cabina
0
0 kg
04
E
PAR:
Peso fune
11156
000000000 kg
Def:
0
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
▲
1 kg
▼
0 kg
▲
1 kg
▼
0 kg
▲
1 kg
▼
0 kg
▲
1 kg
▼
0 kg
E
E
E
E
SEQ
q
SEQ
05
PAR: 11158
Inerzia riduttore
Def:
0
0 kgm²
▼
0 kgm²
11160
▲
1 kgm²
000000000 kgm²
▼
0 kgm²
▲
1 m/s
▼
0 m/s
▲
0.2 m/s
▼
0 m/s
▲
2 m/s
▼
0 m/s
▲
0.5 m/s
▼
0.3 m/s
▲
1 m/s
▼
0 m/s
▲
1 m/s
▼
0 m/s
11158
000000000 kgm²
0
SEQ
06
PAR: 11160
Inerzia motore
Def:
1 kgm²
PAR:
Inerzia riduttore
Def:
SEQ
q
▲
05
E
0
0 kgm²
06
E
PAR:
Inerzia motore
Def:
0
E
E
Terminata l’impostazione delle grandezze meccaniche passare al passo successivo.
Passo 8 – Impostazione parametri dell’applicazione
In questo fase è possibile inserire i dati dell’applicazione.
●●
Impostare i valori della Multivelocità
03 STARTUP GUIDATO
SEQ
SEQ
01
Imp param applicaz?
E=Si
E
Unità mis velocità
Def:
Giù=Prossimo
PAR: 11012
0
0 m/s
01
E
q
PAR: 11020
Multivelocità 0
0.1
0.1 m/s
02
E
PAR: 11022
Multivelocità 1
1
1 m/s
PAR: 11024
Multivelocità 2
0.4
0.4 m/s
●●
PAR:
11024
00000000.4 m/s
0.4
0
0 m/s
05
E
PAR:
11026
Multivelocità 3
000000000 m/s
Def:
0
SEQ
06
PAR: 11028
Multivelocità 4
0
0 m/s
06
E
PAR:
11028
Multivelocità 4
000000000 m/s
Def:
0
E
E
E
E
E
E
Impostare i valori delle Rampe
SEQ
q
SEQ
07
PAR: 11040
Jerk iniziale acc
Def:
0.5
0.5 m/s³
q
m/s³
▼ 0.4
m/s³
11042
▲ 0.7
m/s²
00000000.6 m/s²
▼ 0.5
m/s²
PAR:
11040
Jerk iniziale acc
00000000.5 m/s³
Def:
0.5
SEQ
08
PAR: 11042
Accelerazione
Def:
▲ 0.6
07
E
SEQ
1
Multivelocità 2
Def:
PAR: 11026
Multivelocità 3
Def:
000000001 m/s
04
E
SEQ
q
11022
SEQ
05
Def:
PAR:
Multivelocità 1
Def:
SEQ
q
0.1
SEQ
04
Def:
00000000.1 m/s
03
E
SEQ
q
11020
SEQ
03
Def:
PAR:
Multivelocità 0
Def:
SEQ
q
0
SEQ
02
Def:
11012
000000000 m/s
Def:
SEQ
PAR:
Unità mis velocità
0.6
0.6 m/s²
08
E
PAR:
Accelerazione
Def:
0.6
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
E
E
67
SEQ
q
SEQ
09
PAR: 11044
Jerk finale acc
Def:
1.4
1.4 m/s³
PAR: 11046
Jerk iniziale dec
1.4
1.4 m/s³
PAR: 11048
Decelerazione
0.6
0.6 m/s²
●●
▼ 1.4
m/s³
11048
▲ 0.7
m/s²
00000000.6 m/s²
▼ 0.5
m/s²
11050
▲ 0.6
m/s³
00000000.5 m/s³
▼ 0.4
m/s³
11052
▲ 0.8
m/s²
00000000.7 m/s²
▼ 0.6
m/s³
11046
00000001.4 m/s³
1.4
PAR:
Decelerazione
Def:
PAR: 11050
Jerk finale dec
0.5
0.6
0.5 m/s³
12
E
PAR:
Jerk finale dec
Def:
0.5
SEQ
13
PAR: 11052
Decel fermata
Def:
m/s³
PAR:
Jerk iniziale dec
11
E
SEQ
q
▲ 1.5
1.4
SEQ
12
Def:
m/s³
Def:
SEQ
q
▼ 1.4
SEQ
11
Def:
00000001.4 m/s³
10
E
SEQ
q
m/s³
SEQ
10
Def:
▲ 1.5
PAR:
Jerk finale acc
Def:
SEQ
q
11044
09
E
0.7
0.7 m/s²
13
E
PAR:
Decel fermata
Def:
0.7
E
E
E
E
E
Impostare i valori delle Distanze
SEQ
q
SEQ
14
PAR: 11104
Distanza multivel 1
Def:
0
0m
q
Spento
▲
Acceso
Spento
▼
Acceso
PAR:
▲
0.121 m
▼
0.119 m
0
PAR:
11130
Arrivo diretto
SEQ
PAR: 11132
Zona arrivo diretto
Def:
0 m
000000000 m
15
E
SEQ
q
▼
11104
SEQ
PAR: 11130
Arrivo diretto
16
1 m
PAR:
Distanza multivel 1
Def:
SEQ
15
▲
14
E
0.120 m
16
E
0000000.120 m
Def:
0.120
11132
Dist arrivo diretto
0.120
E
E
E
A questo punto procedere con il passo 9 per salvare i parametri dell’impianto inseriti e quelli che il Drive ha calcolato
con le procedure di autoapprendimento e auto fasatura.
Passo 9 – Salvataggio parametri
Per salvare le nuove impostazioni dei parametri, in modo che vengano mantenute anche allo spegnimento, eseguire
questa procedura:
03 STARTUP GUIDATO
SEQ
01
Salva parametri?
E=Si
E
SEQ
PAR: 550
Salva parametri?
Prem E per eseguire
01
E
03 STARTUP GUIDATO
PAR: 550
Salva parametri?
Eseguito
Giù=Prossimo
Fine sequenza
Su=Ind.
(1)
(2)
(3)
Giù=Uscita
(4)
(1) Premere il tasto E per iniziare la procedura di salvataggio parametri
(2) Confermare con il tasto “E””
(3) Conclusione della procedura
(4) Terminato correttamente il salvataggio dei parametri il Drive propone questa schermata a conclusione della procedura di avviamento guidato.
68
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
Verifica finale
Nota!Se si vuole utilizzare il valore di inerzia calcolata dal drive, copiare il valore del parametro 5.4.20 CalcInertia (PAR 12020, Menu LIFT/ MECHANICAL DATA)
nel parametro 16.20 Inerzia, PAR: 2240.
Menu 5.4 MECHANICAL DATA, parametro 5.4.20 CalcInertia, PAR: 12020, default=(S).
01
02
03
04
05
MONITOR
INFORMAZIONI DRIVE
STARTUP GUIDATO
CONFIG DRIVE
LIFT
uqx3
5.1
5.2
5.3
5.4
5.5
VELOCITA'
RAMPE
SEQUENZE
DATI MECCANICI
DISTANZE
5.4 DATI MECCANICI
u
12/12
PAR:
12020
InerziaCalcolata
4.11 kgm2
Menu 16 GUAD REG VELOCITA', parametro 16.20 Inerzia, PAR: 2240, default=(S).
14
15
16
17
18
DATI MOTORE
CONFIG ENCODER
GUAD REG VELOCITA’
PARAM REGOLATORI
CONFIG COPPIA
16 GUAD REG VELOCITA’
ux2
20/21
PAR:
2240
Inerzia
Def:
4.11 kgm2
4.110
Prima di fare girare il motore verificare, ed eventualmente modificare, l'impostazione del parametro :
Menu 21 CONFIG ALLARMI, parametro 21.12 Soglia sovravelocità, PAR: 4540.
17
18
19
20
21
PARAM REGOLATORI
CONFIG COPPIA
FUNZIONI
COMUNICAZIONE
CONFIG ALLARMI
21 CONFIG ALLARMI
ux8
12/50
PAR:
4540
Soglia sovravelocità
144 rpm
Def: 144
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
69
10 - Risoluzione ai problemi
10.1 Allarmi
Nota !Per il reset degli allarmi vedere il paragrafo 8.6.1.
Nella tabella seguente il Codice è visibile solo da linea seriale.
Codice
Messaggio di errore
visualizzato sul display
Sottocodice
Descrizione
0
Nessun allarme
Condizione: Nessun allarme presente
1
Sovratensione
Condizione: Allarme di sovratensione nel DC link dovuta all’energia recuperata dal motore. La tensione che giunge alla parte di potenza del Drive è
troppo alta rispetto alla soglia massima relativa all’impostazione del parametro PAR 560 Tensione di rete
Soluzione:
- Allungare la rampa di decelerazione.
- Utilizzare una resistenza di frenatura tra i morsetti BR e C per dissipare l’energia di recupero
2
Sottotensione
3
Guasto terra
Condizione: Allarme di sottotensione nel DC link.
La tensione che giunge alla parte di potenza del Drive è troppo bassa rispetto alla soglia minima relativa all’impostazione del parametro PAR 560 Tensione
di rete dovuta a:
- tensione di rete troppo bassa oppure cadute di tensione troppo prolungate.
- cattivo collegamento dei conduttori (ad esempio morsetti di contattore, induttanza, filtro, ecc, non ben serrati):
Soluzione: Controllare i collegamenti.
Condizione: Allarme di cortocircuito verso massa
Soluzione:
- Verificare i cablaggi del Drive e del motore.
- Verificare che il motore non sia a massa.
4
Sovracorrente
Condizione: Allarme d’intervento protezione sovracorrente istantanea.
La causa può essere l’impostazione non corretta dei parametri del regolatore di corrente o un corto circuito tra le fasi o verso terra sull’uscita del Drive.
Soluzione:
- Controllare i parametri del regolatore di corrente
- Verificare i cablaggi verso il motore
5
Desaturazione
Condizione: Allarme di sovracorrente istantanea interna al ponte IGBT.
Soluzione: Spegnere e riaccendere il Drive.
In caso di persistenza dell’allarme contattare il servizio assistenza tecnica
6
Sottotens Mult
Condizione: Sono stati eseguiti un numero di tentativi di riavvio automatici dopo l’allarme Sottotensione superiore al valore impostato nel PAR 4650
Tentativi riavvio UV nell’intervallo di tempo nel PAR 4652 Ritardo tentativi UV.
Soluzione: Si sono verificati troppi allarmi di Sottotensione.
Applicare le soluzioni suggerite per l’allarme Sottotensione.
7
Sovracc Mult
Condizione: Sono stati eseguiti 2 tentativi di riavvio automatico dopo l’allarme di Sovracorrente nell’intervallo di tempo di 30 secondi. Se intercorrono più
di 30 secondi dopo l’intervento dell’allarme Sovracorrente il conteggio di tentativi già eseguiti viene azzerato
Soluzione: Si sono verificati troppi allarmi di Sovracorrente.
Applicare le soluzioni suggerite per l’allarme Sovracorrente.
8
Desatur Mult
9
Sovrat dissip
Condizione: Sono stati eseguiti 2 tentativi di riavvio automatico dopo l’allarme di Desaturazione nell’intervallo di tempo di 30 secondi. Se intercorrono più
di 30 secondi dopo l’intervento dell’allarme Desaturazione il conteggio di tentativi già eseguiti viene azzerato
Soluzione: Si sono verificati troppi allarmi di Desaturazione. Applicare le soluzioni suggerite per l’allarme Desaturazione.
Condizione: Allarme temperatura dissipatore troppo elevata
Soluzione:
- Verificare che la ventola di raffreddamento funzioni regolarmente.
- Verificare che i dissipatori non siano intasati
10
Sovrat lin dis
Condizione: Allarme temperatura dissipatore troppo elevata o troppo bassa.
La temperatura ha superato il limite superiore o inferiore di temperatura impostato per il traduttore di temperatura lineare.
Soluzione:
- Verificare che la ventola di raffreddamento funzioni regolarmente.
- Verificare che i dissipatori non siano intasati.
- Verificare che le aperture per l’aria di raffreddamento del quadro non siano ostruite.
11
Sovratemp aria
Condizione: Allarme temperatura aria in ingresso troppo alta.
Soluzione: Verificare il funzionamento della ventola
12
70
Sovrat Motore
Condizione: Allarme sovratemperatura del motore. Possibili cause possono essere:
- Ciclo di carico applicato troppo gravoso
- Temperatura dell’ambiente in cui è installato il motore troppo elevata
- Se il motore è dotato di ventilazione assistita: non funziona il ventilatore
- Se il motore non è dotato di ventilazione assistita: carico troppo elevato a basse velocità. Il raffreddamento della ventola montata sull’albero motore non
è sufficiente per questo ciclo di carico.
- Il motore è utilizzato ad una frequenza inferiore alla nominale, causando delle perdite magnetiche supplementari.
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
Codice
Messaggio di errore
visualizzato sul display
Sottocodice
Descrizione
Soluzione:
- Modificare il ciclo di lavorazione.
- Servoventilare il motore.
13
Sovracc Drive
Condizione: Allarme sovraccarico Drive.
E’ provocato dal superamento della soglia di sovraccarico dell’accumulatore dell’immagine termica I²t del Drive.
Soluzione: Verificare che la taglia del Drive sia adeguata all’applicazione.
14
Sovracc motore
Condizione: Allarme sovraccarico motore.
La corrente assorbita durante il funzionamento è superiore al valore di targa del motore. E’ provocato dal superamento della soglia di sovraccarico
dell’accumulatore dell’immagine termica I²t del motore.
Soluzione:
- Diminuire il carico del motore.
- Aumentare la taglia del motore.
15
Sovracc res fre
16
Mancanza fase
Condizione: Allarme sovraccarico resistenza di frenatura.
La corrente assorbita dalla resistenza è superiore a quella nominale. E’ provocato dal superamento della soglia di sovraccarico dell’accumulatore
dell’immagine termica I²t della resistenza di frenatura.
Soluzione: Aumentare il valore in Watt delle resistenze di frenatura
Condizione: Allarme mancanza fase di alimentazione.
Soluzione: Verificare la tensione della linea di alimentazione e l’eventuale intervento delle protezioni a monte del Drive.
17
Guasto opz Bus
Condizione: Errore in fase di configurazione oppure errore di comunicazione.
XXX0H-X
Se la prima cifra a sinistra di “H” del sottocodice di allarme è uguale a 0, l’errore è relativo ad un problema di comunicazione.
XXXXH-X
Se la prima cifra a sinistra di “H” del sottocodice di allarme è diverso da 0, l’errore è relativo ad un problema di configurazione.
Soluzione: Per errori di configurazione verificare la configurazione della comunicazione con Bus, tipo di Bus, Baudrate, address, impostazione parametri
Per errori di comunicazione verificare cablaggi, resistenze di terminazione, immunità ai disturbi, impostazioni delle tempistiche dei timeout.
Per maggiori dettagli consultare il manuale della scheda bus utilizzata.
18
Guast opz I/O1
Condizione: Errore nella comunicazione tra Regolazione e scheda di espansione I/O nello slot 1
Soluzione: Verificare la corretta inserzione, vedere Appendice sezione A.1.
19
Guast opz I/O2
20
Guasto opz enc
Condizione:
Soluzione:
Condizione: Errore nella comunicazione tra Regolazione e scheda retroazione Encoder
Soluzione: Verificare la corretta inserzione , vedere Appendice sezione A.1.
21
Guasto esterno
Condizione: Allarme esterno presente.
Un ingresso digitale è stato programmato come allarme esterno, ma la tensione +24V non è disponibile sul morsetto.
Soluzione: Verificare il corretto serraggio delle viti dei morsetti
22
Perd Retroaz
Condizione: Allarme perdita della retroazione di velocità.
Viene generato in caso di anomalia dell’encoder. Ogni tipo di encoder genera un allarme Perd Retroaz [22] in modo differente.
Soluzione:
Fare riferimento al parametro 2172 Codice perd retr vel per l’informazione sulla causa dell’allarme ed al capitolo 10.2 Allarme Perd Retroaz [22]
23
Sovravelocità
Condizione: Allarme sovravelocità motore .
La velocità del motore supera i limiti impostati nei parametri PAR 670 Limite sup rif vel e PAR 672 Lim inf rif vel.
Soluzione:
- Limitare il riferimento di velocità.
- Verificare che il motore non venga trascinato in sovravelocità durante la rotazione.
24
Perd Riferim
Condizione: Allarme perdita del riferimento di velocità.
Interviene se la differenza tra il riferimento del regolatore di velocità e quella attuale del motore è maggiore a 100rpm. La condizione si verifica perché il
Drive è andato in limite di corrente. E’ disponibile soltanto in modalità Vett Flusso OL e Vett Flusso OC.
Soluzione: Verificare le condizioni di carico del Drive
25
All stop Emerg
26
Disalimentaz
Condizione: Allarme arresto d’emergenza.
E’ stato premuto il palsante di Arresto sul tastierino con il parametro Modal tasto arresto impostato a ArrEmer&Allarm in caso di modalità Remoto>Morsettiera o Remoto->Digitale o Locale->Morsettiera.
Soluzione: Rimuovere la causa per cui è stato necessario premere il tasto Arresto sul tastierino ed eseguire il reset del Drive.
Condizione: Il Drive è stato abilitato in assenza della tensione di alimentazione della parte di potenza.
Soluzione: Controllare l’alimentazione del Drive
27 ...
32
Non usato 1... 6
33 ...
40
Guasto Plc 1
...
Guasto Plc 8
Condizione: Applicazione attiva sviluppata in ambiente IEC 61131-3 ha trovato vere le condizioni per generare questo specifico allarme. Il significato
dell’allarme è in funzione del tipo di applicazione. Per maggiori funzioni consultare la documentazione relativa all’applicazione specifica.
XXXXH-X
Il codice XXXXH-X indica la causa dell’errore: prendere nota per approfondimenti con il servizio assistenza.
Soluzione: Consultare la documentazione relativa all’applicazione attiva.
41
Watchdog
Condizione: si può verificare durante il funzionamento quando si attiva la protezione watchdog del micro; l’allarme viene inserito nella lista allarmi e alarm
log. Dopo questo allarme:
- il Drive esegue automaticamente un reset
- il controllo del motore non è disponibile.
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
71
Codice
Messaggio di errore
visualizzato sul display
Sottocodice
XXXXH-X
Descrizione
Il codice XX indica il tipo di errore: prendere nota per approfondimenti con il servizio assistenza.
Soluzione: Se allarme è stata una conseguenza di una variazione di configurazione del Drive (impostazione parametro, installazione opzione, scaricamento
di una applicazione Plc) rimuoverla.
Spegnere e riaccendere il Drive.
42
Errore trap
Condizione: si può verificare durante il funzionamento quando si attiva la protezione trap del micro; l’allarme viene inserito nella lista allarmi e alarm log.
Dopo questo allarme:
- il Drive esegue automaticamente un reset
- il controllo del motore non è disponibile.
XXXXH-X
Il codice XXXXH-X (SubHandler-Class) indica la causa dell’errore: prendere nota per approfondimenti con il servizio assistenza.
Soluzione: Se allarme è stata una conseguenza di una variazione di configurazione del Drive (impostazione parametro, installazione opzione, scaricamento
di una applicazione Plc) rimuoverla.
Spegnere e riaccendere il Drive.
43
Err di sistema
Condizione: si può verificare durante il funzionamento quando si attiva la protezione del sistema operativo; l’allarme viene inserito nella lista allarmi e
alarm log. Dopo questo allarme:
- il Drive esegue automaticamente un reset
- il controllo del motore non è disponibile.
XXXXH-X
Il codice Il codice XXXXH-X (Error-Pid) indica il tipo di errore: prendere nota per approfondimenti con il servizio assistenza.
Soluzione: Se allarme è stata una conseguenza di una variazione di configurazione del Drive (impostazione parametro, installazione opzione, scaricamento
di una applicazione Plc) rimuoverla.
Spegnere e riaccendere il Drive.
44
Errore utente
Condizione: si può verificare durante il funzionamento quando si attiva protezione del software; l’allarme viene inserito nella lista allarmi e alarm log. Dopo
questo allarme:
- il Drive esegue automaticamente un reset
- il controllo del motore non è disponibile.
XXXXH-X
Il codice XXXXH-X (Error-Pid) indica il tipo di errore: prendere nota per approfondimenti con il servizio assistenza.
Soluzione: Se allarme è stata una conseguenza di una variazione di configurazione del Drive (impostazione parametro, installazione opzione, scaricamento
di una applicazione Plc) rimuoverla.
Spegnere e riaccendere il Drive.
45
Errore param
Condizione: se si verifica un errore durante l’attivazione del database parametri salvato in flash; l’allarme viene inserito nella lista allarmi e storico allarmi.
XXXH-X
Il codice XXXXH-X indica il numero del parametro (Hex-Dec) che provoca l’errore: prendere nota per approfondimenti con il servizio
assistenza.
Soluzione: Impostare il parametro che provoca l’errore ad valore corretto ed eseguire Salva parametri, spegnere e riaccendere il Drive.
46
Car par fabbrica
Condizione: si può verificare durante il caricamento del database parametri salvato in flash
É normale se appare nelle seguenti condizioni: alla prima acccensione, quando si scarica una nuova versione di firmware, quando si installa la regolazione
su una nuova taglia, quando si cambia la region.
Se questo messaggio appare quando il Drive è già in servizio significa che si è verificato un problema nel database parametri salvati in Flash.
Se appare questo messaggio il Drive ripristina il database di default, cioè quello scaricato in fase di produzione in fabbrica
0001H-1
Il database salvato non è valido
0002H-2
Il database salvato non è compatibile
0003H-3
Il database salvato è relativo ad una taglia differente dalla taglia attuale
0004H-4
Il database salvato è relativo ad una regione differente dalla regione attuale
Soluzione: Impostare i parametri al valore desiderato ed eseguire Salva parametri
47
Error config plc
Condizione: si può verificare durante il caricamento dell’applicazione Mdplc
L’applicazione Mdplc presente sul Drive non è eseguita.
0004H-4
Applicazione scaricata ha il Crc su DataBlock e Function table differente
0065H-101
L’applicazione scaricata ha un identificativo non valido (Info)
0066H-102
L’applicazione scaricata usa un numero di task errato (Info)
0067H-103
Applicazione scaricata ha una configurazione software errata
0068H-104
Applicazione scaricata ha il Crc su DataBlock e Function table differente
0069H-105
Si è verificato un Errore Trap o un Err di sistema.
Il Drive ha eseguito automaticamente una operazione di Reset.
Applicazione non è eseguita.
Vedere in Alarm List ulteriori informazioni riguardo ad errore che si è verificato
006AH-106
Applicazione scaricata ha un identificativo non valido (Task)
006BH-107
Applicazione scaricata usa un numero di task errato (Task)
006CH-108
Applicazione scaricata ha il Crc errato (Tabelle + Codice)
Soluzione: Rimuovere applicazione Mdplc o scaricare una applicazione Mdplc corretta
48
Car plc fabbr
Condizione: si può verificare durante il caricamento del database parametri salvato nella Flash dell’applicazione Mdplc
É normale se appare appare alla prima acccensione, dopo aver scaricato una nuova applicazione.
Se questo messaggio appare quando il Drive è già in servizio significa che si è verificato un problema nel database parametri salvati in Flash.
Se appare questo messaggio il Drive esegue automaticamente il comando Load default.
0001H-1
Il database salvato non è valido
Soluzione: Impostare i parametri al valore desiderato ed eseguire Salva parametri
49
72
Chiave errata
Condizione: si può verificare in fase di alimentazione del Drive nel caso in cui venga inserita la chiave di abilitazione errata per una data funzione firmware.
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
Codice
Messaggio di errore
visualizzato sul display
Sottocodice
Descrizione
0001H-1
Chiave per PLC errata. Non disponibile applicazione PLC
Soluzione: Consultare il personale Gefran per la richiesta della chiave di abilitazione della funzione firmware desiderata.
50
Condizione: si può verificare all’alimentazione del Drive durante la fase di setup encoder eseguito per ogni configurazione del parametro 552 Modalità
regolazione.
Errore Encoder
100H-256
Causa: Durante la fase di setup si è verificato un errore; le informazioni ricevute dall’encoder non sono attendibili. Se l’encoder è usato
per retroazione viene generato anche l’allarme Perd Retroaz [22].
Soluzione: Eseguire azioni suggerite per allarme Perd Retroaz [22].
200H-512
Causa: Il firmware sulla scheda opzionale encoder non è compatibile con quello sulla scheda di regolazione. Le informazioni ricevute
dall’encoder non sono attendibili
Soluzione: Consultare il personale Gefran per procedere all’aggiornamento del firmware della scheda opzionale encoder.
51
Condizione: è stata rimossa una scheda opzionale rispetto alla configurazione presente all’ultimo comando Salva parametri o si è verificato un guasto
sulla scheda opzionale o sulla scheda di regolazione.
Opt cfg change
Soluzione: Se l’operatore ha rimosso volontariamente la scheda eseguire il comando Salva parametri. Se l’operatore non ha rimosso la scheda identificare e sostituire la scheda difettosa
10.2 Allarme Perd Retroaz in funzione del tipo di retroazione
Nota !Per la corretta interpretazione delle cause che hanno provocato l'allarme, è necessario trasformare il codice esadecimale scritto nel parametro 15.13 Codice
perd retr vel, PAR 2172 , nel corrispondente binario e verificare quindi nella tabella dell'encoder utilizzato i vari bit attivi e la relativa descrizione.
Esempio con encoder Endat:
PAR 2172 = A0H (valore esadecimale)
Nella tabella " Allarme Perd Retroaz [22] con encoder assoluto EnDat" A0 non è presente nella colonna valore.
A0 deve essere visto come una bitword che significa A0 -> 10100000 -> bit 5 e bit 7 . Sono quindi intervenute contemporaneamente le seguenti cause :
Bit 5 = 20H Causa: segnali SSI disturbati causano un errore CKS oppure Parity
Bit 7 = 80H Causa: Encoder ha rilevato un suo malfunzionamento e lo segnala al Drive tramite Error bit. Nei bit 16..31 è presente il tipo di malfunzionamento
rilevato da encoder.
●●
Bit
Valore
Nome
0
0x01
CHA
Allarme Perd Retroaz [22] con encoder incrementale Digitale
Descrizione
Causa: mancano impulsi o sono presenti disturbi sul canale A incrementale.
Soluzione: Verificare il collegamento del canale A encoder-Drive, verificare il collegamento dello schermo, verificare la tensione di alimentazione encoder,
verificare il parametro 2102 Alimentaz encoder, verificare il parametro 2104 Config ing encoder.
1
0x02
CHB
Causa: mancano impulsi o sono presenti disturbi sul canale B incrementale.
Soluzione: Verificare il collegamento del canale B encoder-Drive, verificare il collegamento dello schermo, verificare la tensione di alimentazione encoder,
verificare il parametro 2102 Alimentaz encoder, verificare il parametro 2104 Config ing encoder.
2
0x04
CHZ
Causa: mancano impulsi o sono presenti disturbi sul canale Z incrementale.
Soluzione: Verificare il collegamento del canale Z encoder-Drive, verificare il collegamento dello schermo, verificare la tensione di alimentazione encoder,
verificare il parametro 2102 Alimentaz encoder, verificare il parametro 2104 Config ing encoder, verificare il parametro 2110 Errore segnali enc
●●
Allarme Perd Retroaz [22] con encoder incrementale Sinus
Bit
Valore
Nome
Descrizione
3
0x08
MOD_INCR
Causa: livello di tensione non corretto o sono presenti dei disturbi sui segnali dei canali A-B incrementali.
Soluzione: Verificare il collegamento dei canali A-B encoder-Drive, verificare il collegamento dello schermo, verificare la tensione di alimentazione encoder,
verificare il parametro 2102 Alimentaz encoder, verificare il parametro 2108 Segnale encoder Vpp.
●●
Allarme Perd Retroaz [22] con encoder SinCos
Bit
Valore
Nome
3
0x08
MOD_INCR
Descrizione
Causa: livello di tensione dei non corretto o sono presenti dei disturbi sui segnali dei canali A-B incrementali.
Soluzione: Verificare il collegamento dei canali A-B encoder-Drive, verificare il collegamento dello schermo, verificare la tensione di alimentazione encoder,
verificare il parametro 2102 Alimentaz encoder, verificare il parametro 2108 Segnale encoder Vpp.
4
0x10
MOD_ABS
Causa: livello di tensione dei non corretto o sono presenti dei disturbi sui segnali dei canali SinCos assoluti.
Soluzione: Verificare il collegamento dei canali A-B encoder-Drive, verificare il collegamento dello schermo, verificare la tensione di alimentazione encoder,
verificare il parametro 2102 Alimentaz encoder, verificare il parametro 2108 Segnale encoder Vpp.
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
73
●●
Allarme Perd Retroaz [22] con encoder assoluto SSI
Bit
Valore
Nome
Descrizione
3
0x08
MOD_INCR
Causa: livello di tensione dei non corretto o sono presenti dei disturbi sui segnali dei canali A-B incrementali.
Soluzione: Verificare il collegamento dei canali A-B encoder-Drive, verificare il collegamento dello schermo, verificare la tensione di alimentazione encoder,
verificare il parametro 2102 Alimentaz encoder, verificare il parametro 2108 Segnale encoder Vpp.
5
0x20
CRC_CKS_P
Causa: segnali SSI non presenti o disturbati.
Soluzione: Verificare il collegamento clock e data encoder-Drive, verificare il collegamento dello schermo, verificare la tensione di alimentazione encoder,
verificare il parametro 2102 Alimentaz encoder, verificare il parametro 2112 Bits encoder SSI.
8
0x100
Setup error
Causa: Durante la fase di setup si è verificato un errore.
Soluzione: Verificare il collegamento clock e data encoder-Drive, verificare il collegamento dello schermo, verificare la tensione di alimentazione encoder,
verificare il parametro 2102 Alimentaz encoder, verificare il parametro 2112 Bits encoder SSI.
●●
Allarme Perd Retroaz [22] con encoder assoluto EnDat
Bit
Valore
Nome
Descrizione
3
0x08
MOD_INCR
Causa: livello di tensione dei non corretto o sono presenti dei disturbi sui segnali dei canali A-B incrementali
Soluzione: Verificare il collegamento dei canali A-B encoder-Drive, verificare il collegamento dello schermo, verificare la tensione di alimentazione encoder,
verificare il parametro 2102 Alimentaz encoder, verificare il parametro 2108 Segnale encoder Vpp.
5
0x20
CRC_CKS_P
Causa: segnali SSI non presenti o disturbati causano un errore su CRC
Soluzione: Verificare il collegamento clock e data encoder-Drive, verificare il collegamento dello schermo, verificare la tensione di alimentazione encoder,
verificare il parametro 2102 Alimentaz encoder.
8
0x100
Setup error
Causa: Durante la fase di setup si è verificato un errore.
Soluzione: Verificare il collegamento clock e data encoder-Drive, verificare il collegamento dello schermo, verificare la tensione di alimentazione encoder,
verificare il parametro 2102 Alimentaz encoder.
Le seguenti condizioni si verificano durante fase di encoder reset in seguito all’attivazione di Perd Retroaz [22]
Bit
Valore
Nome
Descrizione
6
0x40
ACK_TMO
Causa: segnali SSI non presenti o disturbati causano un errore su CRC
Soluzione: Verificare il collegamento clock e data encoder-Drive, verificare il collegamento dello schermo, verificare la tensione di alimentazione encoder,
verificare il parametro 2102 Alimentaz encoder.
7
0x80
DT1_ERR
Causa: Encoder ha rilevato un suo malfunzionamento e lo segnala al Drive tramite bit DT1. Nei bit 16..31 è presente il tipo di malfunzionamento rilevato da
encoder.
Soluzione: Vedere manuale tecnico del costruttore encoder.
Bit
16.31
=0
=1
0
Light source
OK
Failure (1)
1
Signal amplitude
OK
Erroneous (1)
2
Position value
OK
Erroneous (1)
3
Over voltage
NO
Yes (1)
4
Under voltage
NO
Under voltage supply (1)
5
Over current
NO
Yes (1)
6
Battery
OK
Change the battery (2)
7..15
(1) Can also be set after the power supply is switched off or on.
(2) Only for battery-buffered encoders
●●
Bit
Valore
3
0x08
Allarme Perd Retroaz [22] con encoder assoluto Hiperface
Nome
Descrizione
Causa: livello di tensione dei non corretto o sono presenti dei disturbi sui segnali dei canali A-B incrementali.
Soluzione: Verificare il collegamento dei canali A-B encoder-Drive, verificare il collegamento dello schermo, verificare la tensione di alimentazione encoder,
verificare il parametro 2102 Alimentaz encoder, verificare il parametro 2108 Segnale encoder Vpp.
5
0x20
Causa: segnali SSI disturbati causano un errore CKS oppure Parity
Soluzione: Verificare il collegamento clock e data encoder-Drive, verificare il collegamento dello schermo, verificare la tensione di alimentazione encoder,
verificare il parametro 2102 Alimentaz encoder.
6
0x40
Causa: Encoder non riconosce il comando che gli è stato inviato e risponde con ACK. I segnali SSI non presenti causano un errore TMO.
Soluzione: Verificare il collegamento clock e data encoder-Drive, verificare il collegamento dello schermo, verificare la tensione di alimentazione encoder,
verificare il parametro 2102 Alimentaz encoder.
74
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
Bit
Valore
8
0x100
Nome
Descrizione
Causa: Durante la fase di setup si è verificato un errore.
Soluzione: Verificare il collegamento clock e data encoder-Drive, verificare il collegamento dello schermo, verificare la tensione di alimentazione encoder,
verificare il parametro 2102 Alimentaz encoder.
Le seguenti condizioni si verificano durante fase di encoder reset in seguito all’attivazione di Perd Retroaz [22].
Bit
7
Valore
0x80
Nome
Descrizione
DT1_ERR
Causa: Encoder ha rilevato un suo malfunzionamento e lo segnala al Drive tramite Error bit. Nei bit 16..31 è presente il tipo di malfunzionamento rilevato da
encoder.
Soluzione: Vedere manuale tecnico del costruttore encoder.
Tipo
16.31
Tranmission
Codice
Descrizione
09h
Transmitted parity bit is incorrect
0AH
Checksum of transmitted data is wrong
0BH
Incorrect command code
0CH
Wrong number of transmitted data
0DH
Illegal transmitted command argument
0FH
Wrong access authorization specified
0EH
Selected field has READ ONLY status
10H
Data field (re) definition not executable due to field size
11H
Specified address is not available in selected field
12H
Selected field does not yet exist
00H
No encoder error, no error message
03H
Data field operations disabled
04H
Analog monitoring inoperative
08H
Counting register overflow
01H
Encoder analog signal are unreliable
02H
Wrong synchronization or offset
05H-07H
Encoder-internal hardware fault, no operation possible
1CH-1DH
Error in sampling, no operation possible
1EH
Permissible operation temperature is exceeded
(1) Can also be set after the power supply is switched off or on.
(2) Only for battery-buffered encoders
10.2.1 Reset allarme Perd Retroaz
Le cause di attivazione dell’allarme Perd Retroaz [22] e le informazioni acquisite dall’encoder vengono mostrate nel
parametro 2172 Codice perd retr vel.
Se nessuna scheda è montata scatta allarme Perd Retroaz [22] e il parametro 2172 Codice perd retr vel non riporta
nessuna causa. Possono essere attive più cause contemporaneamente.
Nel caso non si riconosce nessuna scheda viene chiamata una routine che ritorna sempre Perd Retroaz [22] attivo
senza specificare una causa.
10.2.2 Allarme Errore encoder
Ad ogni accensione del Drive indipendentemente dalla modalità di regolazione selezionata, viene eseguita una fase
di setup. Se durante la fase di setup si rileva un errore allora viene generato l’allarme Errore encoder con i seguenti
codici:
Bit
Valore
Nome
8
0x100
Setup error
Descrizione
Causa: Durante la fase di setup si è verificato un errore. In seguito a questa segnalazione le informazioni ricavate da encoder non sono attendibili.
Soluzione: Eseguire azioni suggerite per allarme Perd Retroaz [22] in funzione del tipo encoder.
9
0x200
Compatibility
error
Causa: Firmware su scheda opzione non compatibile con firmware su scheda regolazione.
In seguito a questa segnalazione le informazioni ricavate da encoder non sono attendibili.
Soluzione: Contattare Gefran per procedere all’aggiornamento del firmware della scheda opzione.
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
75
10.3 Messaggi
Nota !Per ulteriori informazioni vedere il capitolo 8.7.
Index
1
Messaggio di errore
visualizzato sul display
Caric param fabbrica
Sottocodice
Descrizione
Condizione: si può verificare durante il caricamento del database parametri salvato in flash
É normale se appare nelle seguenti condizioni: alla prima acccensione, quando si scarica una nuova versione di firmware, quando si installa la regolazione
su una nuova taglia, quando si cambia la region.
Se questo messaggio appare quando il Drive è già in servizio significa che si è verificato un problema nel database parametri salvati in Flash.
Se appare questo messaggio il Drive esegue automaticamente il comando Parametri di default.
0001H-1
Il database salvato non è valido
0002H-2
Il database salvato non è compatibile
0003H-3
Il database salvato è relativo ad una taglia differente dalla taglia attuale
0004H-4
Il database salvato è relativo ad una regione differente dalla regione attuale
Soluzione: Impostare i parametri al valore desiderato ed eseguire Salva parametri
2
3
4
Opzione rilev Slot1
Opzione rilev Slot2
Opzione rilev Slot3
Condizione: all’accensione il Drive riconosce la presenza di una scheda opzionale. Viene visualizzato per alcuni secondi uno dei messaggi sul display
0H-0
Nessuna
0004H-4
Can
0008H-8
Enc 1 EXP-DE-I1R1F2-ADL
0108H-264
Enc 2 EXP-SE-I1R1F2-ADL
0208H-520
Enc 3 EXP-SESC- I1R1F2-ADL
0308H-776
Enc 4 EXP-EN/SSI- I1R1F2-ADL
0408H-1032
Enc 5 EXP-HIP- I1R1F2-ADL
0101H-257
I/O 1 EXP-IO-D4-ADL
0501H-1281
I/O 1 EXP-IO-D8R4-ADL
0901H-2305
I/O 1 EXP-IO-D16R4-ADL
0F01-3841
I/O 1 EXP-IO-D12A2R4-ADL
1301H-4865
I/O 1 EXP-IO-D8A4R4-ADL
1501H-5377
I/O 1 EXP-IO-D6R2-F-ADL
00FFH-255
Sconosciuta
Soluzione:
5
Autoapprendimento
(motore)
Condizione: si può verificare durante la procedura di Autoapprendimento
0
1
2
3
4
5
Nessun errore
I comandi non sono configurati in modalità Local.
Soluzione: Eseguire la configurazione richiesta
Il parametro Sel comandi locali non è configurato da tastierino.
Soluzione: Eseguire la configurazione richiesta
I parametri dati targa motore sono cambiati ma non è stato eseguito il comando Acquisisci parametri PAR 2020
Soluzione: Eseguire il comando Acquisisci parametri.
Il motore non è collegato
Soluzione: Collegare il motore
Durante esecuzione autotune si è premuto tasto ESC oppure si è aperto il contatto di abilitazione oppure è intervenuto un allarme. Con
Drive in allarme è stato dato il comando autotaratura.
Soluzione: Rimuovere causa dell’intervento allarme, rimuovere causa apertura contatto di abilitazione, resettare allarme.
6
7
8 ... 21
Una taratura eseguita dall’autotaratura ha prodotto il valore di un parametro fuori dai range min o max.
Soluzione: Verificare dati di targa del motore oppure l’abbinamento taglia Drive e taglia del motore non è corretto.
Si è fornito il comando autotaratura senza abilitazione.
Soluzione: Prima di fornire il comando autotaratura chiudere il contatto di abilitazione
Una taratura eseguita da autotaratura ha raggiunto un limite del metodo di misura
Soluzione: Verificare dati di targa del motore oppure l’abbinamento taglia Drive e taglia del motore non è corretto.
Soluzione: Se si presenta il messaggio con un valore diverso da 0 seguire le indicazioni fornite caso per caso e ripetere l’autotaratura. E’ consigliato
eseguire l’autotaratura utilizzando la procedura di wizard disponibile da tastierino (STARTUP GUIDATO) e da software Tool su PC.
Prestare attenzione a tutti i parametri dei dati di targa del motore in modo speciale a:
- Velocità nominale , Velocità nominale del motore in rpm.
•
•
(ADL2.0-...-AC4) Fare attenzione a non impostare il parametro Velocità nominale alla velocità sincrona. Il parametro Velocità nominale deve
avere un valore inferiore a: [(Frequenza nominale * 60) / Coppie polari].
(ADL2...-...-BR) Impostare il parametro Velocità nominale alla velocità sincrona.
- Frequenza nominale. Frequenza nominale del motore in Hz
- Coppie polari, Paia poli del motore
Se dopo aver eseguito le indicazioni fornite il problema persiste si deve confermare il valore dei parametri dei dati di targa del motore, eseguire commando Acquisisci parametri ma non eseguire l’autotaratura.
76
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
Index
Messaggio di errore
visualizzato sul display
Sottocodice
5
Autoapprendimento)
0
(fasatura
(Solo Sincrono)
40
41
42
43
Descrizione
Nessun errore
La scheda encoder in uso non gestisce la procedura automatica di fasatura.
Soluzione: Utilizzare scheda encoder adeguata
Conteggio impulsi dell’encoder incrementale errato
Soluzione: Verificare i segnali elettrici dell’encoder incrementale. Verificare il valore del parametro Impulsi encoder
Conteggio impulsi dell’encoder assoluto errato
Soluzione: Verificare i segnali elettrici dell’encoder assoluto. Verificare configurazione dell’encoder assoluto
Conteggio impulsi dell’encoder incrementale errato o conteggio impulsi dell’encoder assoluto errato probabilmente a causa del valore
del parametro Coppie polari non corretto o di un carico applicato la motore.
Soluzione: Verificare il valore del parametro Coppie Polari, verificare se è applicato un carico
44
45
46
47
48
49
Conteggio impulsi dell’encoder incrementale errato probabilmente a causa del valore del parametro Impulsi encoder non corretto.
Soluzione: Verificare i segnali elettrici dell’encoder incrementale. Verificare il valore del parametro Impulsi encoder.
Conteggio impulsi dell’encoder assoluto errato
Soluzione: Verificare i segnali elettrici dell’encoder assoluto. Verificare configurazione dell’encoder assoluto.
Conteggio degli impulsi dell’encoder incrementale con segno invertito rispetto al conteggio impulsi dell’encoder assoluto.
Soluzione: Invertire segnale A+ e A- dell’encoder incrementale.
Conteggio degli impulsi dell’encoder incrementale con segno invertito rispetto al conteggio impulsi dell’encoder assoluto.
Soluzione: Invertire segnale A+ e A- dell’encoder assoluto.
Sequenza fasi non corretta. (Messaggio non segnalato)
Soluzione: La procedura automatica ha provveduto a modificare l’impostazione del parametro Direzione encoder. Non occorre fare altro
Durante fasatura automatica si attiva un canale di comunicazione tra Drive ed encoder. Si è verificato un errore su questo canale di
comunicazione.
Soluzione: Ripetere la procedura.
Soluzione: Se si presenta il messaggio con un valore diverso da 0 seguire le indicazioni fornite caso per caso e ripetere l’autofasatura.
6
Configuraz potenza
Condizione: si può verificare durante il riconoscimento delle schede di potenza. In presenza di questo messaggio non è possibile comandare il motore
0020H-32
La configurazione della scheda di potenza è per un Drive non compatibile con scheda di regolazione
0021H-33
La configurazione della scheda di potenza non è compatibile con scheda di regolazione
0017H-23
La configurazione richiesta non è disponibile sulla scheda di potenza
Soluzione: Scaricare sulla scheda di potenza la configurazione corretta
7
Salv param fallito
Condizione: durante il trasferimento dei parametri dal Drive alla memoria del tastierino
0H-0
Errore di comunicazione
0023H-35
Errore di comunicazione
0023H-36
Errore di comunicazione
0025H-37
I dati memorizzati nel tastierino non sono validi
Soluzione:
8
Car param fallito
9
Car par incompleto
Condizione: durante il trasferimento dei parametri dalla memoria del tastierino al Drive
0H-0
Errore di comunicazione
0023H-35
Errore di comunicazione
0023H-36
Errore di comunicazione
0025H-37
I dati memorizzati nel tastierino non sono validi.
Nessun parametro viene trasferito dal tastierino al Drive
0026H-38
Serie Drive non compatibile.
Nessun parametro viene trasferito dal tastierino al Drive
0027H-39
Versione software non compatibile.
Tutti i parametri presenti nella memoria del tastierino sono stati trasferiti nel Drive. Il set di parametri trasferito è relativo ad un Drive con
una versione firmware differente, come conseguenza alcuni parametri potrebbero non essere aggiornati.
0028H-40
Drive size non compatibile.
Tutti i parametri presenti nella memoria del tastierino (esclusi quelli dipendenti dalla taglia del Drive), sono stati trasferiti nel Drive. I
parametri che dipendono dalla taglia mantengono il valore originale.
0029H-41
Errore nella memorizzazione dei parametri nel Drive.
Tutti i parametri presenti nella memoria del tastierino sono stati trasferiti nel Drive. Il trasferimento di uno o più parametri ha causato
l’errore “out of range”oppure uno o più parametri non esistono. Al termine del trasferimento uno o più parametri potrebbero non essere
aggiornati.
002AH-42
Versione e release dell’applicazione Plc non compatibile.
Tutti i parametri presenti nella memoria del tastierino sono stati trasferiti nel Drive.
Il set di parametri trasferito è relativo ad un Drive con una applicazione plc con versione e release dell’applicazione differente, come
conseguenza alcuni parametri dell’applicazione plc potrebbero non essere aggiornati.
002BH-43
Applicazione Plc non compatibile.
Tutti i parametri presenti nella memoria del tastierino tranne quelli relativi all’applicazione plc sono stati trasferiti nel Drive.
Il set di parametri trasferito è relativo ad un Drive con una applicazione plc differente, come conseguenza tutti i parametri
dell’applicazione plc non sono aggiornati.
Soluzione: Recuperare un set di parametri da un Drive compatibile (modello e taglia)
10
Errore conf opzioni
Condizione: si può verificare all’accensione del Drive, durante il riconoscimento delle schede opzionali installate
0001H-1
Scheda opzionale non consentita nello slot 1
0002H-2
Scheda opzionale non consentita nello slot 2
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
77
Index
Messaggio di errore
visualizzato sul display
Sottocodice
Descrizione
0004H-4
0010H-16
Conflitto slot 1 con slot 2
0020H-32
0040H-64
Soluzione: Rimuovere le schede opzionali dagli slot errati ed inserirle negli slot corretti
11
Car plc di fabbrica
Condizione: si può verificare durante il caricamento del database parametri salvato nella Flash dell’applicazione Mdplc
É normale se appare appare alla prima acccensione, dopo aver scaricato una nuova applicazione.
Se questo messaggio appare quando il Drive è già in servizio significa che si è verificato un problema nel database parametri salvati in Flash.
Se appare questo messaggio il Drive ripristina il database di default cioè quello scaricato in fase di download.
0001H-1
Il database salvato non è valido
Soluzione: Impostare i parametri al valore desiderato ed eseguire Salva parametri
12
Errore config plc
Condizione: si può verificare durante il caricamento dell’applicazione Mdplc
L’applicazione Mdplc presente sul Drive non è eseguita.
0004H-4
Applicazione scaricata ha il Crc su DataBlock e Function table differente
0065H-101
L’applicazione scaricata ha un identificativo non valido (Info)
0066H-102
L’applicazione scaricata usa un numero di task errato (Info)
0067H-103
Applicazione scaricata ha una configurazione software errata
0068H-104
Applicazione scaricata ha il Crc su DataBlock e Function table differente
0069H-105
Si è verificato un Trap error o un System error.
Il Drive ha eseguito automaticamente una operazione di Power-up.
Applicazione non è eseguita.
Vedere in Alarm List ulteriori informazioni riguardo ad errore che si è verificato
006AH-106
Applicazione scaricata ha un identificativo non valido (Task)
006BH-107
Applicazione scaricata usa un numero di task errato (Task)
006CH-108
Applicazione scaricata ha il Crc errato (Tabelle + Codice)
Soluzione: Rimuovere applicazione Mdplc o scaricare una applicazione Mdplc corretta
13
Plc 1
14
Plc 2
15
Plc 3
16
Plc 4
17
Guasto opz Bus
Messaggi riservati e dedicati all’applicazione PLC, fare riferimento al manuale dell’applicazione.
Condizione: si può verificare all’accensione del Drive, durante il setup della scheda Bus di campo. Errore in fase di configurazione oppure errore di
comunicazione.
XXX0H-X
Se la prima cifra a sinistra di “H” del sottocodice di allarme è uguale a 0, l’errore è relativo ad un problema di comunicazione.
XXX0H-X
Se la prima cifra a sinistra di “H” del sottocodice di allarme è diverso da 0, l’errore è relativo ad un problema di configurazione
Soluzione: Per errori di configurazione verificare la configurazione della comunicazione con Bus, tipo di Bus, Baudrate, address, impostazione parametri
Per errori di comunicazione verificare cablaggi, resistenze di terminazione, immunità ai disturbi, impostazioni delle tempistiche dei timeout.
Per maggiori dettagli consultare il manuale della scheda bus utilizzata.
Condizione: si può verificare in fase di alimentazione del Drive, nel caso in cui venga inserita la chiave di abilitazione errata per una data funzione
firmware.
18
Chiave errata
xxxxH-x
Soluzione: Chiedere a Gefran la corretta chiave di abilitazione della funzione firmware desiderata.
19
Chiave a tempo
Condizione: si può verificare in fase di alimentazione del Drive nel caso in cui si è inserita la chiave di abilitazione errata per una data funzione firmware.
Si è ancora nella fase in cui è permesso utilizzare liberamente la funzione firmware ma a breve questo tempo scadrà.
xxxxH-x
Numero di ore ancora disponibili per le quali è permesso utilizzare liberamente la funzione.
Soluzione: Chiedere a Gefran la corretta chiave di abilitazione della funzione firmware desiderata.
20
Errore card SD
Condizione: si può verificare durante il trasferimento dei dati dal Drive alla SD card o nel trasferimento dei dati da SD card al Drive. La causa potrebbe
essere una memory card non compatibile o non presente.
XXX0H-X
Errore di comunicazione
Soluzione: Verificare memory card utilizzata
21
Errore parametri
Condizione: se si verifica un errore durante l’attivazione del database parametri salvato in flash; l’allarme viene inserito nella lista allarmi e storico allarmi.
XXX0H-X
Il codice XXXXH-X indica il numero del parametro (Hex-Dec) che provoca l’errore: prendere nota per approfondimenti con il servizio
assistenza.
Soluzione: Impostare il parametro che provoca l’errore ad valore corretto ed eseguire Salva parametri, spegnere e riaccendere il Drive.
22
Errore encoder
Condizione: si può verificare all’alimentazione del Drive durante la fase di setup encoder eseguito per ogni configurazione del parametro 552 Modalità
regolazione.
100H-256
Causa: Durante la fase di setup si è verificato un errore; le informazioni ricevute dall’encoder non sono attendibili. Se l’encoder è usato
per retroazione viene generato anche l’allarme Perd Retroaz [22].
Soluzione: Eseguire azioni suggerite per allarme Perd Retroaz [22].
200H-512
Causa: Il firmware sulla scheda opzionale encoder non è compatibile con quello sulla scheda di regolazione. Le informazioni ricevute
dall’encoder non sono attendibili
Soluzione: Consultare il personale Gefran per procedere all’aggiornamento del firmware della scheda opzionale encoder.
23
78
Options cfg changed
Condizione: si può verificare in fase di alimentazione del drive nel caso in cui sia stata rimossa o sostituita una scheda di espansione. inserita la chiave
di abilitazione errata per una data funzione firmware
0064H-100
Rimossa scheda dallo slot 1.
0014H-20
Rimossa scheda dallo slot 2
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
Index
Messaggio di errore
visualizzato sul display
Sottocodice
0078H-120
Descrizione
Rimossa scheda dallo slot 1 e dallo slot 2
Soluzione: Verificare la configurazione hardware, poi premere il tasto ESC. Per salvare la nuova configurazione hardware eseguire un salvataggio dei
parametri (Salva parametri, menu 04.01 par 550).
24
Errore aggiorn fw
Condizione: Verificare, durante l'aggiornamento del firmware, se il file non è del formato corretto oppure è corrotto.
Soluzione: provare con un file corretto.
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
79
Appendice
A.1 - ADL200 Configurazione Basic
ADL200 viene codificato anche come versione BASIC, senza implementare alcun tipo di espansione I/O od Encoder.
L’utilizzatore è libero di integrare autonomamente qualsiasi delle opzioni disponibili, necessarie alle proprie esigenze
di impianto (una scheda I/O deve essere presente per potere utilizzare il drive).
Le operazioni per tali integrazioni sono semplici e rapide, inserendo le schede negli appositi connettori presenti sulla
scheda di regolazione (fornita standard sul drive e non intercambiabile)
Nota!Collegamenti e dati tecnici delle Espansioni I/O ed Encoder sono riportati nei capitoli A.2 e A.3.
ADL200 – ... – XBL – F – AC4
TIpo / Descrizione
Codice
Regolazione
R-ADL
Scheda di regolazione base
RC-ADL
Scheda di regolazione con CAN integrato
EXP-IO-D4-ADL
2 Ingressi digitali + 2 Uscite digitali
EXP-IO-D5R3-F-ADL
5 Ingressi digitali + 3 uscite relè
Espansioni I/O
EXP-IO-D8R4-ADL
8 Ingressi digitali + 4 uscite relè
EXP-IO-D16R4-ADL
12 Ingressi digitali + 4 Uscite digitali + 4 Uscite relè
EXP-IO-D12A2R4-ADL
8 Ingressi digitali + 4 Uscite digitali + 4 Uscite relè
+ 2 Ingressi analogici
EXP-IO-D8A4R4-ADL
8 Ingressi digitali + 4 Uscite relè + 2 Ingressi
analogici + 2 Uscite analogiche
EXP-DE-I1R1F2-ADL
Encoder digitale 3 Canali + Ripetizione + 2 Freeze
EXP-SE-I1R1F2-ADL
Espansioni Encoder
Encoder sinusoidale 3 Canali + Ripetizione + 2
Freeze
EXP-SESC-I1R1F2-ADL
Encoder sinusoidale SinCos 3 Canali + Ripetizione
+ 2 Freeze
EXP-EN/SSI-I1R1F2-ADL
Encoder sinusoidale - Assoluto EnDat + Ripetizione
+ 2 Freeze
EXP-HIP-I1R1F2-ADL
Encoder sinusoidale - Assoluto Hiperface +
Ripetizione + 2 Freeze
Asincrono BASIC
ADL200 – ... – XBL – F – AC4 - C ADL200 – ... – XBL – F – BR4 - C
Asincrono BASIC + CAN
Brushless BASIC + CAN
------
O
O
------
O
S567L
S5L08
S568L
S566L
S569L
S570L
S5L04
O
S571L
O
S5L06
S5L07
S572L
= di serie, = opzionale , O= non possibile
80
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
A.1.2 - Installazione schede di Espansione
• Slot 1: dedicato alle schede Espansione I/O (EXP-IO-...-ADL)
• Slot 2: dedicato alle schede Espansione Encoder (EXP-DE-ADL, EXP-SE-ADV, ecc)
2
1
1
3 (x3)
3 (x2)
Slot 1
Slot 2
1. Rimuovere la copertura superiore: effettuare una lieve pressione con un cacciavite negli incavi posti alla sommità della copertura in plastica delle schede
2.
Sollevare la copertura come indicato in figura.
3. (Per sostituire una scheda di espansione, svitare le viti (A) e togliere la scheda da sostituire).
4.
Posizionare la nuova scheda nello Slot dedicato e avvitare le viti (A) fornite con la scheda nelle sedi (C).
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
81
A.2 - Schede I/O
●● EXP-IO-D4-ADL
1 ingresso di abilitazione (Enable) + 2 ingressi digitali (DI) + 2 uscite digitali (DO)
EXP-IO-D4-ADL
Start reverse
1418, Sorg uscita dig 5X
1420, Sorg uscita dig 6X
Comandi lift
Parametro associato
Start forward
T1
-
-
DO D0 DO DO DI DI EN DI OV 24
2 1 CM PS 2 1 HW CM out our
--
--
26 27 28 29
7
8
9
10 11 12
●● EXP-IO-D5R3-F-ADL
1 ingresso di abilitazione (Enable) + 5 ingressi digitali (DI) + 3 uscite a relè (RO).
Questa scheda ha i morsetti non estraibili.
EXP-IO-D5R3-F-ADL
Start forward
Emergency
Multispeed 0
Multispeed 1
Comandi lift
Parametro associato
Drive OK
Brake Contactor
Start reverse
T1
1410, Sorg uscita dig 1X
Run Contactor
1414, Sorg uscita dig 3X
Comandi lift
Parametro associato
1412, Sorg uscita dig 2X
T3
RO RO RO RO RO RO
3O 3C 2O 2C 1O 1C
DI DI DI DI DI EN DI OV 24
5 4 3 2 1 HW CM out our
52 53 54 55 56 57
4
5
6
7
8
9
10 11 12
●● EXP-IO-D8R4-ADL
1 ingresso di abilitazione (Enable) + 8 ingressi digitali (DI) + 4 uscite a relè (RO)
EXP-IO-D8R4-ADL
Start forward
Emergency
Multispeed 0
Multispeed 1
Multispeed 2
Feedback brake
Comandi lift
Parametro associato
Contactor feedback
Drive OK
Brake Contactor
Start reverse
T1
1410, Sorg uscita dig 1X
Run Contactor
DoopOpen
1414, Sorg uscita dig 3X
1416, Sorg uscita dig 4X
Comandi lift
Parametro associato
82
1412, Sorg uscita dig 2X
T3
RO RO RO RO RO RO RO RO
4O 4C 3O 3C 2O 2C 1O 1C
DI DI DI DI DI DI DI DI EN DI OV 24
8 7 6 5 4 3 2 1 HW CM out our
50 51 52 53 54 55 56 57
1
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
2
3
4
5
6
7
8
9
10 11 12
●● EXP-IO-D8A4R4-ADL
1 ingresso di abilitazione (Enable) + 8 ingressi digitali (DI) + 2 ingressi analogici (AI) + 2 uscite analogiche (AO) + 4
uscite a relè (RO)
EXP-IO-D8A4R4-ADL
Start forward
Emergency
Multispeed 0
Multispeed 1
Multispeed 2
Feedback brake
Comandi lift
Parametro associato
Contactor feedback
Drive OK
Parametro associato
Brake Contactor
T1
Start reverse
T2
1410, Sorg uscita dig 1X
Run Contactor
DoopOpen
1414, Sorg uscita dig 3X
1416, Sorg uscita dig 4X
Comandi lift
Parametro associato
1412, Sorg uscita dig 2X
T3
RO RO RO RO RO RO RO RO
4O 4C 3O 3C 2O 2C 1O 1C
AI AI AI AI AO AO AO AO -10 +10
2N 2P 1N 1P 2N 2P 1N 1P OUT OUT
DI DI DI DI DI DI DI DI EN DI OV 24
8 7 6 5 4 3 2 1 HW CM out our
50 51 52 53 54 55 56 57
40 41 42 43 44 45 46 47 48 49
1
2
3
4
5
6
7
8
9
10 11 12
●● EXP-IO-D12A2R4-ADL
1 ingresso di abilitazione (Enable) + 8 ingressi digitali (DI) + 4 uscite digitali (DO) + 2 ingressi analogici (AI) + 4 uscite a
relè (RO)
EXP-IO-D12A2R4-ADL
Start forward
Emergency
Multispeed 0
Multispeed 1
Multispeed 2
Feedback brake
Comandi lift
Parametro associato
Contactor feedback
1418, Sorg uscita dig 5X
Start reverse
T1
1420, Sorg uscita dig 6X
1424, Sorg uscita dig 8X
Drive OK
Parametro associato
Brake Contactor
1422, Sorg uscita dig 7X
T2
1410, Sorg uscita dig 1X
Run Contactor
1414, Sorg uscita dig 3X
DoopOpen
1416, Sorg uscita dig 4X
Comandi lift
Parametro associato
1412, Sorg uscita dig 2X
T3
RO RO RO RO RO RO RO RO
4O 4C 3O 3C 2O 2C 1O 1C
AI AI AI AI DO DO DO DO DO DO
2N 2P 1N 1P 4 3 2 1 CM PS
DI DI DI DI DI DI DI DI EN DI OV 24
8 7 6 5 4 3 2 1 HW CM out our
50 51 52 53 54 55 56 57
40 41 42 43 24 25 26 27 28 29
1
2
3
4
5
6
7
8
9
10 11 12
●● EXP-IO-D16R4-ADL
1 ingresso di abilitazione (Enable) + 12 ingressi digitali (DI) + 4 uscite digitali (DO) + 4 uscite a relè (RO)
EXP-IO-D16R4-ADL
Start forward
Emergency
Multispeed 0
Multispeed 1
Multispeed 2
Feedback brake
Comandi lift
Parametro associato
Contactor feedback
Start reverse
T1
1418, Sorg uscita dig 5X
1420, Sorg uscita dig 6X
1422, Sorg uscita dig 7X
1424, Sorg uscita dig 8X
Drive OK
Parametro associato
Brake Contactor
T2
1410, Sorg uscita dig 1X
Run Contactor
1414, Sorg uscita dig 3X
DoopOpen
1416, Sorg uscita dig 4X
Comandi lift
Parametro associato
1412, Sorg uscita dig 2X
T3
RO RO RO RO RO RO RO RO
4O 4C 3O 3C 2O 2C 1O 1C
DI DI DI DI DO DO DO DO DO DO
12 11 10 9 4 3 2 1 CM PS
DI DI DI DI DI DI DI DI EN DI OV 24
8 7 6 5 4 3 2 1 HW CM out our
50 51 52 53 54 55 56 57
20 21 22 23 24 25 26 27 28 29
1
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
2
3
4
5
6
7
8
9
10 11 12
83
A.2.1 - Caratteristiche Ingressi/Uscite
Alimentazione 24V DC
Tolleranza
Corrente massima
Isolamento
●●
± 10%
150 mA
1KV
Ingressi digitali (DI) e di abilitazione hardware (EN-HW)
Descrizione
Caratteristiche
Tipo
24V PNP / NPN
Tensione di funzionamento
0V to + 24V (+ 30V max)
Carico
5mA @ +24V - Rl = 4,7 kΩ
Soglie
Vic < 5V – Vih > 15V
Isolamento
Si – Funzionale (> 1 kV)
PNP
EN-HW
DI-X
NPN
EN-HW
DI-X
4k7
+24V
EN-HW
DI-X
DI-CM
●●
+24V
Descrizione
Caratteristiche
Tipo
24V PNP / NPN
Tensione di funzionamento
0V to + 24V (+ 30V max)
Carico
20mA @ +24V - Rl = 1,2 kΩ (40mA max)
Soglie
Vol < 1V – Voh > Vali-1
Si – Funzionale (> 1 kV)
PNP
NPN
DO-PS
DO-X
DO-PS
+24V
DO-X
DO-X
DO-X
LOAD
4k7
DO-CM
Uscite Relays (RO)
Descrizione
Caratteristiche
Tipo
NO Relay (singolo contatto)
Tensione di funzionamento
250Vca / - 30Vcc / 2A
Carico
50 mA @ +10V
Isolamento
Si – 4 kV
RO-XO
RO-XC
RO-X
84
LOAD
4k7
DO-CM
●●
EN-HW
DI-X
DI-CM
Uscite digitali (DO)
Isolamento
●●
4k7
Ingressi analogici (AI)
Descrizione
Caratteristiche
Tipo
Differenziale in tensione
Tensione di ingresso
± 10V (± 12,5V fondo scala)
R di ingresso
10 kΩ
Risoluzione
12 Bits (11 + segno)
Precisione
1% del fondo scala
Isolamento
NO
Descrizione
Caratteristiche
Tipo
Differenziale in corrente
Corrente di ingresso
0 (4) mA to 20mA
R di ingresso
500 Ω
Risoluzione
12 Bits (11 + segno)
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
+24V
Precisione
1% del fondo scala
Isolamento
NO
-
AI-X
+
AI-X
AI-X
OP
500
(*)
(*) Selezione ingresso V/I (V=OFF, I=ON)
●●
Selezione Tensione /Corrente su ingressi e uscita analogiche
Oltre alla programmazione del parametro (PAR.1602 - 1652 - 1989) è necessario anche verificare la posizione degli
switch S5-S4-S3 sulla scheda I/O.
(Default)
●●
Switch (scheda I/O)
I
V
Abbinamento parametro
S3
1602
Tipo ing analogico1X
S4
1652
Tipo ing analogico2X
S5
1898
Tipo uscita an 2X
Uscite analogiche (AO)
Descrizione
Caratteristiche
Tipo
Single-ended in tensione
Tensione di ingresso
± 10V (± 12,5V fondo scala)
Carico
5mA @ ± 10V - Rl = 2,2 kΩ
Risoluzione
12 Bits (11 + segno)
Precisione
2% del fondo scala
Isolamento
NO
Descrizione
Caratteristiche
Tipo
Single-ended in corrente (solo uscita 2)
Corrente di ingresso
0 (4) mA to 20mA
R di ingresso
500 Ω
Risoluzione
12 Bits (11 + segno)
Precisione
2% del fondo scala
Isolamento
NO
OUTPUT #1
OUTPUT #2
(*)
AO-X
OP
AO-X +
AO-X
OP
2
3
1
AO-X +
OP
AO-X -
AO-X (*) Selezione uscita V/I (solo per uscita 2, V=1-2, I=1-3)
●●
Uscite Riferimenti analogici (±10)
Descrizione
Caratteristiche
Tipo
Single-ended in tensione
Tensione di funzionamento
± 10V
Carico
5mA @ ± 10V - Rl = 5 kΩ (max 10 mA)
Precisione
1% del fondo scala
Isolamento
NO
Protezione da corto circuito
SI
+10V
OP
+10V
- 10V
OP
- 10V
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
85
A.3 - Encoder e schede Espansione Encoder
A.3.1 - Encoder
Gli encoder forniscono la retroazione di velocità e posizione del motore.
Gli algoritmi di controllo presenti nel drive ADL200 sono in grado di controllare motori asincroni e sincroni a magneti
permanenti (brushless). Nel caso di motori asincroni l’algoritmo di controllo può utilizzare o meno la misura di velocità
ricavata dalla lettura dell’encoder. Nel caso di motore brushless l’algoritmo di controllo necessita di un encoder che
permetta di valutare anche la posizione assoluta del motore.
Il drive supporta diversi tipi di encoder ognuno dei quali viene gestito tramite una specifica scheda di espansione, che
viene rilevata automaticamente all’avvio.
La tabella riassume le configurazioni possibili:
ADL2xx - AC
SSC
ADL2xx -BR
Vett Fluss OL
Vett Fluss CL
SSC OL
SSC CL
-
-
Vett Fluss CL
PAR 2444 – Slip
comp mode
Sigla scheda
EXP – xx
PAR 532, tipo
scheda slot 2
Incrementale Digitale
DE
Enc 1
-
Consigliata
-
Consigliata
Non permessa
Incrementale Sinusoidale
SE
Enc 2
-
Possibile
-
Consigliata
Non permessa
Incrementale sinusoidale +
assoluto SinCos
SESC
Enc 3
-
Possibile
-
Possibile
Consigliata
Incrementale sinusoidale +
Assoluto Endat/SSI
EN/SSI
Enc 4
-
Possibile
-
Possibile
Consigliata
Incrementale sinusoidale +
assoluto Hiperface
HIP
Enc 5
-
Possibile
-
Possibile
Consigliata
Tipo encoder
PAR 552 – Regulation mode
- = encoder non utilizzato
Gli encoder devono essere montati all’albero motore con giunti privi di gioco. I migliori risultati di regolazione si ottengono con le configurazioni che presentano canali incrementali sinusoidali.
Le connessioni elettriche devono essere effettuate tramite l’utilizzo di cavi di qualità con doppini intrecciati e schermati
secondo le modalità e le caratteristiche descritte nei paragrafi seguenti.
I parametri di configurazione relativi a ciascun encoder si trovano nel menu CONFIG ENCODER.
In caso di malfunzionamento dell’encoder il drive genera l’allarme Perd Retroaz [22] e la causa di malfunzionamento è
mostrata nel parametro 2172 Codice perd retr vel.
Nel caso in cui l’encoder non è utilizzato dall’algoritmo di controllo il drive gestisce comunque la lettura della posizione
encoder ma non genera nessun allarme in caso di un suo malfunzionamento.
86
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
A.3.2 - Fasatura
Per un corretto funzionamento dell’algoritmo di regolazione ADL230 Brushless é necessario conoscere la posizione del
rotore rispetto alle fasi di alimentazione di statore. A tal fine deve essere nota la posizione 0° fornita dall’encoder assoluto rispetto alla posizione di un polo del motore ed inoltre il verso di conteggio dell'encoder deve essere concorde con
le fasi di alimentazione del motore.
Questa operazione è chiamata fasatura. La fasatura può essere eseguita in modo manuale, agendo direttamente sul
montaggio meccanico dell'encoder sull'albero motore e sulle fasi, oppure utilizzando delle procedure automatiche
disponibili nel drive.
In ogni caso la fasatura deve essere ripetuta tutte le volte che:
- si modifica la posizione di fissaggio dell’encoder
- si modifica la sequenza fasi del collegamento di alimentazione del motore
- si modifica il collegamento segnali incrementali dell’encoder
- si modifica il collegamento dei segnali assoluti dell’encoder
- si modifica il valore del parametro PAR 2008 Coppie polari
- si modifica il valore del parametro PAR 2100 Impulsi encoder
- si sostituisce il Drive (in alternativa eseguire download parametri prelevati da Drive precedente)
Esistono due diverse procedure a disposizione che possono essere avviate tramite la scrittura di due diversi parametri:
• PAR 2190 Autofasatura rotaz -> fasatura tramite rotazione:
tale procedura deve essere eseguita con motore libero di ruotare e senza carico applicato.
• PAR 2192 Autofasatura statica -> fasatura statica:
tale procedura deve essere eseguita con motore bloccato con freno.
Fasatura tramite rotazione
Questa procedura sfrutta la possibilità di muovere il motore, per un angolo massimo di 2 coppie polari, per trovare la
giusta fasatura dell'encoder, effettuare controlli incrociati tra le informazioni disponibili dell'encoder e del motore e di
correggere l'eventuale discordanza della direzione di conteggio dell'encoder rispetto alla sequenza delle fasi di alimentazione del motore tramite la modifica automatica del PAR 2130 Direzione encoder.
Nota! In quest'ultimo caso potrebbe accadere che un riferimento positivo di velocità produca una rotazione in senso inverso rispetto a quello definito positivo per
l'encoder (di solito verso orario), garantendo comunque il buon controllo del motore.
Se si preferisce mantenere come verso positivo per i riferimenti quello dell'encoder occorre scambiare due fasi di
alimentazione del motore e ripetere la procedura di fasastura tramite rotazione.
Se la procedura termina senza errore viene riportato sul tastierino il codice 0, altrimenti se sono stati individuate delle
incongruenze che non possono essere corretti dal drive viene visualizzato uno dei codici indicati in Autoapprendimento
(fasatura), vedere capitolo 10.3 Messaggi.
Le anomalie riscontrabili riguardano
- anomalie nei segnali elettrici non rilevate con allarme “Perd Retroaz [22]”
- errore nell’impostazione del PAR 2008 Coppie polari
- errore nell’impostazione del PAR 2100 Impulsi encoder
Fasatura statica
In tale modalità l'impossibilità di muovere il motore non permette di effettuare nessun tipo di controllo incrociato tra le
informazioni disponibili dell'encoder e del motore riguardo la coerenza dei parametri ne tanto meno della direzione di
conteggio.
Occorre quindi assicurarsi che tale condizione sia verificata prima di avviare la procedura.
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
87
A.3.3 - Schede Encoder
Nota !L'alimentazione dell'encoder deve essere dimensionata in funzione della lunghezza del cavo e dagli assorbimenti come indicato nella tabella (1) in fondo a
questo capitolo.
EXP-DE-I1R1F2-ADL
Encoder Incrementale Digitale. Questa scheda viene fornita di default nei drives per controllo di motori asincroni in
modalità vettoriale ad orientamento di campo (FOC).
EXP-DE-I1R1F2-ADL
XER
XE
BR BR AR AR
- + - +
DI DI DI
F2 F1 CM
20 21 22 23
1
2
3
4
5
6
7
Z
-
Z
+
B
-
B
+
A
-
A 0VE +VE
+ out out
8
9
10 11 12 13 14 15
(TTL Line-driver)
Canali���������������������������������
Frequenza max.��������������������������
Numero di impulsi ������������������������
Interfaccia elettrica �����������������������
Capacità di carico ������������������������
Alimentazione interna programmabile����������
Lunghezza cavo �������������������������
A+ A-, B+ B-, Z+ Z-, differenziali line driver, optoisolati.
Gestita mancanza segnali encoder.
200 kHz (verificare il numero di impulsi encoder in funzione della velocità massima)
min 128, max 16384 (default 1024)
TTL (ref. GND) Ulow ≤ 0,5V Uhigh ≥ 2,5V
10mA @ 5,5V (Zin 365Ω)
min +5,2V, max +6,0V (default + 5,2V) − Imax 150mA . Vedere tabella (1)
50mt max
ENCODER INCREMENTALE DIGITALE (DE) PUSH-PULL / LINE DRIVER
ZZ+
BB+
AA+
0VE out
+VE out
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
(*)
(*) Collegamento schermatura, vedere figura 7.2.4
(TTL/HTL push-pull)
Canali��������������������������������� A / B / Z, complementari push-pull, optoisolati.
Non è possibile gestire la mancanza encoder con versioni single-ended, in questo caso disabilitare l'allarme Perd Retroaz [22]
Frequenza max.�������������������������� 100 kHz (verificare il numero di impulsi encoder in funzione della velocità massima)
Numero di impulsi ������������������������ min 128, max 16384 (default 1024)
Interfaccia elettrica ����������������������� HTL Ulow ≤ 3,0V Uhigh ≥ Venc - 3,0V
Capacità di carico ������������������������ 7mA @ 20.0V (Zin 2635Ω)
V max Ingressi digitali (*)������������������� HTL = 27V max.
TTL = 7V max
Alimentazione interna programmabile���������� min +6,0V, max +20,0V (default + 6,0V) − Imax 150mA . Vedere tabella (1)
Lunghezza cavo ������������������������� 50mt max
88
(*) con alimentazione esterna.
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
ENCODER INCREMENTALE DIGITALE (DE) SINGLE ENDED NPN O.C.
ZZ+
BB+
AA+
0VE out
+VE out
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
(*)
ENCODER INCREMENTALE DIGITALE (DE) SINGLE ENDED PNP O.C.
ZZ+
BB+
AA+
0VE out
+VE out
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
(*)
(*) Collegamento schermatura, vedere figura 7.2.4
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
89
EXP-SE-I1R1F2-ADL
Encoder Incrementale Sinusoidale (SE).
EXP-SE-I1R1F2-ADL
XER
XE
BR BR AR AR
- + - +
DI DI DI
F2 F1 CM
20 21 22 23
1
2
3
4
5
6
7
Z
-
Z
+
B
-
8
9
10 11 12 13 14 15
Canali���������������������������������
Frequenza max.��������������������������
Numero di impulsi ������������������������
Interfaccia elettrica �����������������������
Capacità di carico ������������������������
Alimentazione ���������������������������
B
+
A
-
A 0VE +VE
+ out out
A+ A-, B+ B-, Z+ Z-, differenziali
Gestita mancanza segnali encoder.
200 kHz (verificare il numero di impulsi encoder in funzione della velocità massima)
min 128, max 16384 (default 1024)
Canali A/B 0,8V ≤ Vpp ≥ 1,2V (typ. 1,0V) − Canale Z 0,2V ≤ Vpp ≥ 0,8V
8mA @ 1.0Vpp (Zin 120Ω)
min +5,2V, max +6,0V (default + 5,2V) − Imax 150mA . Alimentazione interna programmabile (1)
Lunghezza cavo ������������������������� 50mt max
ENCODER INCREMENTALE SINUSOIDALE (SE)
ZZ+
BB+
AA+
0VE out
+VE out
(*)
(*) Collegamento schermatura, vedere figura 7.2.4
90
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
EXP-SESC-I1R1F2-ADL
Encoder Incrementale sinusoidale + assoluto SinCos /SESC). Questa scheda viene fornita di default nei drives per
controllo di motori sincroni a magneti permanenti (Brushless - SESC).
EXP-SESC-I1R1F2-ADL
XER
XE
BR BR AR AR
- + - +
DI DI DI COS COS SIN SIN Z
F2 F1 CM - + - + -
Z
+
B
-
20 21 22 23
1
9
10 11 12 13 14 15
2
3
4
5
6
7
8
B
+
A
-
A 0VE +VE
+ out out
Canali ���������������������������������
Frequenza max.��������������������������
Numero di impulsi ������������������������
Interfaccia elettrica �����������������������
Capacità di carico ������������������������
Alimentazione ���������������������������
A+ A-, B+ B-, Z+ Z-, Cos+ Cos-, Sin+ Sin-, differenziali
Gestita mancanza segnali encoder.
200 kHz (verificare il numero di impulsi encoder in funzione della velocità massima)
min 128, max 16384 (default 1024)
Canali A/B/Sin/Cos 0,8V ≤ Vpp ≥ 1,2V (typ. 1,0V) − Canale Z 0,2V ≤ Vpp ≥ 0,8V
Canali A/B/Z 8mA @ 1.0Vpp (Zin 120Ω)
Canali Sin/Cos 1mA @ 1.0Vpp (Zin 1kΩ)
min +5,2V, max +6,0V (default + 5,2V) − Imax 150mA . Alimentazione interna programmabile (1)
Lunghezza cavo ������������������������� 50mt max
ENCODER INCREMENTALE SINUSOIDALE + ASSOLUTO SINCOS /SESC)
COSCOS+
SINSIN+
ZZ+
BB+
AA+
0VE out
+VE out
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
(*)
(*) Collegamento schermatura, vedere figura 7.2.4
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
91
EXP-EN/SSI-I1R1F2-ADL
Incrementale sinusoidale + Assoluto EnDat/SSI (EN/SSI). Questa scheda viene fornita di default nei drives per controllo di motori sincroni a magneti permanenti (Brushless - ENDAT).
EXP-EN/SSI-I1R1F2-ADL
XER
XE
BR BR AR AR
- + - +
DI DI DI DT DT CK CK VS VS
F2 F1 CM - + - + - +
B
-
20 21 22 23
1
10 11 12 13 14 15
2
3
4
5
6
7
8
9
B
+
A
-
A 0VE +VE
+ out out
Canali���������������������������������
Frequenza max.��������������������������
Numero di impulsi ������������������������
Interfaccia elettrica �����������������������
Capacità di carico ������������������������
Alimentazione ���������������������������
A+ A-, B+ B-, differenziali
Gestita mancanza segnali encoder.
200 kHz (verificare il numero di impulsi encoder in funzione della velocità massima)
min 128, max 16384 (autoriconosciuto all'inizializzazione)
0,8V ≤ Vpp ≥ 1,2V (typ. 1,0V)
8mA @ 1.0Vpp (Zin 120Ω)
min +5,2V, max +6,0V (default + 5,2V) − Imax 150mA . Alimentazione interna programmabile (1)
Lunghezza cavo ������������������������� 50mt max (vedi paragrafo Lunghezza cavi Encoder)
Canali assoluti���������������������������
Interfaccia������������������������������
Frequenza max ��������������������������
Numero di bits���������������������������
CK+ CK-, DT+ DT- differenziali, RS-485
Gestita mancanza segnali encoder.
EnDat: 2.1/2.2 singolo/multi giro (gestito set di comandi compatibile solo con 2.1)
SSI: Standard Sick/Stegman singolo/multi giro
EnDaT: 1MHz con delay compensation (non programmabile)
SSI: 400 KHz (non programmabile)
EnDat: max 32bit/giro * max 32bit giri (autoriconosciuti all'inizializzazione)
SSI:13-25bits (default 25)
Incrementale sinusoidale + Assoluto EnDat/SSI (EN/SSI)
DTDT+
CKCK+
VSVS+
BB+
AA+
0VE out
+VE out
(*)
(*) Collegamento schermatura, vedere figura 7.2.4
(**) VS+ / VS- : facoltativo (feedback alimentazione encoder)
92
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
1
2
3
4
5
6
7
8 (**)
9 (**)
10
11
12
13
14
15
EXP-HIP-I1R1F2-ADL
Encoder Incrementale sinusoidale + assoluto Hiperface (HIP)
EXP-HIP-I1R1F2-ADL
XER
XE
BR BR AR AR
- + - +
DI DI DI DT DT
F2 F1 CM - +
20 21 22 23
1
2
3
4
5
B
6
7
8
9
B
+
A
-
A 0VE +VE
+ out out
10 11 12 13 14 15
Canali incrementali �����������������������
Frequenza max.��������������������������
Numero di impulsi ������������������������
Interfaccia elettrica �����������������������
Capacità di carico ������������������������
Alimentazione ���������������������������
A+ A-, B+ B-, differenziali
Gestita mancanza segnali encoder.
200 kHz (verificare il numero di impulsi encoder in funzione della velocità massima)
min 128, max 16384 (autoriconosciuto all'inizializzazione)
0,8V ≤ Vpp ≥ 1,2V (typ. 1,0V)
8mA @ 1.0Vpp (Zin 120Ω)
+7.0V / +8,0V / +12.0V Alimentazione interna programmabile (1)
Lunghezza cavo ������������������������� 50mt max
Canali assoluti���������������������������
Interfaccia������������������������������
Frequenza max ��������������������������
Numero di bits���������������������������
DT+ DT- differenziali, RS-485
Gestita mancanza segnali encoder.
Standard Sick/Stegman singolo/multi giro
9600baud (non programmabile)
max 32bit/giro * max 32bit giri (autoriconosciuti all'inizializzazione)
ENCODER INCREMENTALE SINUSOIDALE + ASSOLUTO HIPERFACE (HIP)
DTDT+
BB+
AA+
0VE out
+VE out
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
(*)
(*) Collegamento schermatura, vedere figura 7.2.4
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
93
Ripetizione Encoder RE (TTL/HTL line-driver)
Le schede di espansione Encoder dispongono di un’uscita dell’encoder incrementale con livelli del Driver Linea TTL/
HTL (in funzione della alimentazione encoder principale) da utilizzarsi come ripetizione del dispositivo di retroazione
del servomotore. Questa funzione viene eseguita via hw ed è possibile ripetere un’uscita encoder con un divisore
programmabile. I segnali d’uscita dell’encoder sono disponibili sul connettore XER:
BB+
AA+
out
out
out
out
20
21
22
23
(*)
(*) Collegamento schermatura, vedere figura 7.2.4
Canali���������������������������������
Frequenza max.��������������������������
Numero di impulsi ������������������������
Interfaccia elettrica �����������������������
Capacità di carico ������������������������
Alimentazione ���������������������������
A+ A-, B+ B-, differenziali line driver, optoisolati.
200 kHz
ripetizione 1/1-1/2-1/4-1/8 (default 1/1)
TTL (ref. GND) Ulow ≤ 0,5V Uhigh ≥ 2,5V
HTL Ulow ≤ 3,0V Uhigh ≥ Venc - 3,0V (solo con encoder DE)
TTL 20mA @ 5,5V (Zin 120Ω) per ogni canale
HTL 50mA max. per ogni canale.
Venc (i segnali encoder sono ripetuti sullo stesso valore dell'encoder primario), il valore di
alimentazione per la ripetizione è sempre lo stesso impostato per l'encoder primario.
Lunghezza cavo ������������������������� 50mt max
(1) Tramite tastierino (menù CONFIG ENCODER, parametro Alimentaz encoder (PAR 2102) è possibile selezionare il valore della tensione di alimentazione interna
dell’encoder per compensare la riduzione di tensione dovuta alla lunghezza del cavo dell’encoder ed alla corrente di carico, step minimo 0,1V
Tensione di alimentazione interna dell’encoder
94
Tipo opzione encoder
Def
Min
Max
Enc 1
5,2 V
5,2 V
20,0 V
Enc 2
5,2 V
5,2 V
6,0 V
Enc 3
5,2 V
5,2 V
6,0 V
Enc 4
5,2 V
5,2 V
10,0 V
Enc 5
8,0 V
7,0 V
12,0 V
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
A.4 - Sistema di monitoraggio del freno
A.4.1 Introduzione
La funzione di monitoraggio freno presente sui prodotti della serie ADL200/ADL100 consente l’implementazione della
funzione di monitoraggio automatico del freno conformità a quanto richiesto dalla normativa EN81-1 A.3 §9.11.3.
L’implementazione della funzionalità di monitoraggio freno richiede due elementi funzionali:
1. Gestione dell’ allarme di avaria freno
2. Reset dell’allarme avaria freno
Lo schema di riferimento per l’implementazione della funzionalità è quello di Figura 1.
3 Phase Mains
F1
S2
US1
S1
1
3
5
2
4
6
(optional)
L1
AC
BREAKING
RESISTORS
L1
L2
L3
U1
V1
W1
PE
KEYPAD / DCP
PC
L
SH
H
R-ADL
CAN
BR
RS232
C
ADL200
P-ADL
C1
EXP-ENC
EXP-IO
DICM
0VOUT
24VOUT
7
DI1
6
ENHW
DI2
5
8
9
10
11
12
StartFwdCmd
DI4
DI5
DI3
DI6
4
StartRevCmd
2 4 6
3
Emergency mode
K2M
2
MltSpd S0
BR
1 3 5
1
MltSpd S1
PE
BrakeFdb2
PE
DI8
T3
BrakeFdb1
T2
RO2O
V2 W2
T1
Emergency Fault
U2
RO2O
EM
DI7
D
Emergency
Failure
K2M
TRAFO
1 3 5
K3M
BR
2 4 6
K3M
K2M
K3M
24V from
Safety Chain
BRAKE
M
3~
FBK
Figura 1 Schema di di collegamento ADL per emendamento A3.
In tale figura si evidenzia che
A) ADL controlla l’attivazione/disattivazione del freno mediante relè BR
B) Entrambi i feedback del freno vengono riportati sugli ingressi di ADL
C) ADL segnala eventuali malfunzionamenti al controllore di sistema (compreso quello del freno) mediante relè RO1
interno.
D) Il controllore di sistema può bloccare in modo sicuro il freno di sistema disattivando i contattori K2 e K3
Schema alternativo a quello illustrato prevede che ADL chiuda/apra i contattori K2 e K3 ma che l’alimentazione delle
bobine e dei comandi ADL arrivi dal controllore.
L’inserimento dell’allarme di avaria freno ha lo scopo di verificare se i due feedback provenienti dal freno hanno uno
stato coerente e, nel caso di incertezza, inserire un fermo di sistema a livello di drive ADL. La procedura di inserimento
dell’allarme ha la seguente struttura.
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
95
A.4.2 Configurazione allarme avaria Freno
• Attivazione Funzione allarme avaria freno
L’installatore dovrà preventivamente individuare i necessari digital input del drive ADL e cablare i fili corrispondenti ai
segnali feedback su tali input. Si noti che a seconda della tipologia di cablaggio i feedback freno risulteranno normalmente asseriti (freno chiuso – digital input a 1) o normalmente non asseriti (freno chiuso – digital input a 0).
Il funzionamento dell’allarme avaria freno prevede un funzionamento normalmente asserito. Nel caso il cablaggio funzionalmente invertito sarà sufficiente negare i digital input corrispondenti nella configurazione ADL.
La funzione di allarme avaria freno viene configurata come segue:
1. All’interno del Menu 5.7 INGRESSI/USCITE cambiare l’impostazione del parametro 11252 Brake Fbk A3 Sel (default Zero) e selezionare il digital input corrispondente al secondo feedback del freno. L’impostazione di Brake Fbk
A3 Sel ad un valore diverso da Zero attiva automaticamente la funzione di allarme avaria freno.
2. Successivamente impostare il parametro 11252 Brake Fbk A3 Sel in modo da selezionare il digital input corrispondente al primo feedback del freno.
La funzione di avaria freno è ora attivata. L’installatore responsabile d’impianto dovrà necessariamente collaudare la funzione ogni volta che questa viene attivata o modificata seguendo la procedura di collaudo avaria
freno.
• Reset allarme avaria freno
1. Entrare nel menu 5.9 ALLARMI LIFT, verificare se l’allarme Brake Alarm è inserito.
2. All’interno del menu 5.9 ALLARMI LIFT selezionare il parametro 11268 Reset Brake Alarm (default 0).
3. Il sistema richiede un codice, inserire il codice di sblocco 5313.
4. Verificare nuovamente se l’allarme Brake Alarm è stato resettato.
• Disattivazione allarme avaria freno
1. All’interno del menu 5.7 INGRESSI/USCITE, cambiare l’impostazione del parametro 11252 Brake Fbk A3 Sel a
Zero. La funzione allarme avaria freno è disattivata.
2. Se la nuova configurazione non gestisce nessun feedback del freno cambiare l’impostazione del parametro 11236
Sel conferma freno in [3708] Mon com freno.
•
Procedura di collaudo allarme avaria freno
Seguire i seguenti passi:
1. Staccare il filo corrispondente al primo feedback del freno sul corrispondente digital Input.
2. Provare una ripartenza dal piano con il feedback staccato. Se la cabina non si muove (comportamento corretto)
passare al punto 3. Se la cabina si muove l’allarme non sta funzionando correttamente, riverificare le varie parti del
sistema.
3. Se l’allarme avaria freno è inserito, resettarlo con la procedura di reset e proseguire al punto 4. Se l’allarme non è
inserito riverificare le varie parti del sistema.
4. Ripetere i punti 1. 2. 3. Staccando il secondo feedback del freno dal corrispondente input.
Se la procedura di ha avuto esito positivo l’allarme avaria freno funziona correttamente.
A.4.3 Manutenzione della funzione avaria Freno
L’installatore, a fronte delle periodiche ispezioni di impianto o di indicazioni riguardanti il freno ripeterà la procedura di
collaudo allarme avaria freno.
L’installatore verificherà ad ogni occasione il log allarmi per identificare eventuali anomalie.
A.4.4 Diagnostica Guasti
Guasto
Possibile Causa
Feedback scollegati/collegati erroneamente
Feeback freno non configurati correttamente
Il motore non si muove, scatta continuamente l’allarme di avaria freno
Tempo di monitoring troppo breve rispetto a
tempi di reazione del sistema
L’allarme di avaria freno non è inserito.
Il motore si muove anche con feedback
scollegato
96
La configurazione PAR 11252 Brake Fbk Sel
A3 / PAR 11236 Sel conferma freno non è
corretta.
ADL200 • Guida rapida all’installazione - Specifiche e collegamento
Soluzione
Ricontrollare schema di cablaggio dei feedback
freno e livelli elettrici.
Controllare configurazione dei PAR 11236 Sel
conferma freno, PAR 11252 Brake Fbk Sel
A3. Verificare corretto funzionamento segnali
(livelli elettrici), nel caso invertire digital inputs
Configurare un tempo superiore di PAR 11206
Mantenimento freno,
Controllare l’impostazione di PAR 11252 Brake
Fbk Sel A3.
PAR 11252 Brake Fbk Sel A3 e PAR 11236
Sel conferma freno non devono essere Zero o
Mon com freno.
Gefran worldwide
GEFRAN BENELUX
ENA 23 Zone 3, nr. 3910
Lammerdries-Zuid, 14A
B-2250 OLEN
Ph. +32 (0) 14248181
Fax. +32 (0) 14248180
[email protected]
GEFRAN BRASIL
ELETROELETRÔNICA
Avenida Dr. Altino Arantes,
377 Vila Clementino
04042-032 SÂO PAULO - SP
Ph. +55 (0) 1155851133
Fax +55 (0) 1132974012
[email protected]
GEFRAN DEUTSCHLAND
Philipp-Reis-Straße 9a
63500 SELIGENSTADT
Ph. +49 (0) 61828090
Fax +49 (0) 6182809222
[email protected]
SIEI AREG - GERMANY
Gottlieb-Daimler-Strasse 17/3
D-74385 Pleidelsheim
Ph. +49 7144 89 736 0
Fax +49 7144 89 736 97
[email protected]
GEFRAN ESPAÑA
C/ de Vic, 109-111
08160 Montmeló (BARCELONA)
Ph. +34 934982643
Fax +34 935721571
[email protected]
GEFRAN S.p.A.
Via Sebina 74
25050 Provaglio d’Iseo (BS) ITALY
Ph. +39 030 98881
Fax +39 030 9839063
[email protected]
www.gefran.com
GEFRAN SIEI Drives Technology (Shanghai) Co., Ltd.
No. 1285, Beihe Road, Jiading District,
Shanghai, China 201807
Ph. +86 21 69169898
Fax +86 21 69169333
[email protected]
GEFRAN FRANCE
4, rue Jean Desparmet - BP 8237
69355 LYON Cedex 08
Ph. +33 (0) 478770300
Fax +33 (0) 478770320
[email protected]
GEFRAN SUISSE SA
Rue Fritz Courvoisier 40
2302 La Chaux-de-Fonds
Ph. +41 (0) 329684955
Fax +41 (0) 329683574
[email protected]
GEFRAN SIEI Electric (Shanghai) Pte. Ltd.
No. 1285, Beihe Road, Jiading District,
Shanghai, China 201807
Ph. +86 21 69169898
Fax +86 21 69169333
[email protected]
GEFRAN - UK Ltd.
Capital House, Hadley Park East
TELFORD, TF1 6QJ
Ph. +44 (0) 845 2604555
Fax +44 (0) 845 2604556
[email protected]
GEFRAN INDIA Pvt. Ltd
Head office (Pune office)
Survey No: 182/1 KH, Bhukum,
Paud road, Taluka – Mulshi,
Pune - 411 042. MH, INDIA
Ph:+91-20-3939 4400
Fax: +91-20-3939 4401
[email protected]
GEFRAN Inc.
8 Lowell Avenue
WINCHESTER - MA 01890
Toll Free 1-888-888-4474
Fax +1 (781) 7291468
[email protected]
Branch office (Thane office)
403, Damodar Nivas,
‘B’ Cabin Road, Near Railway quarters,
Naupada, Thane (W)
400 602 , MH, India
Ph. +91-22-2533 8797
Fax +91-22-2541 8797
[email protected]
GEFRAN SIEI - ASIA
Blk. 30 Loyang way
03-19 Loyang Industrial Estate
508769 SINGAPORE
Ph. +65 6 8418300
Fax. +65 6 7428300
[email protected]
Branch office (Ahmedabad Office)
20-A, Second Floor,
Kala Purnam Building,
Near Municipal Market,
C. G. Road, Ahmedabad
380 019, Gujarat, India
Phone: +91-79-2640 3591
Phone/Fax: +91-79-2640 3592
[email protected]
GEFRAN TAIWAN
Rm. 3, 9F., No.8, Ln. 157,
Cihui 3rd St., Zhongli City,
Taoyuan County 320, Taiwan (R.O.C.)
Tel/Fax +886-3-4273697
[email protected]
Drive & Motion Control Unit
Via Carducci 24
21040 Gerenzano [VA] ITALY
Ph. +39 02 967601
Fax +39 02 9682653
[email protected]
Technical Assistance :
[email protected]
Customer Service :
[email protected]
Ph. +39 02 96760500
Fax +39 02 96760278
Manuale ADL200 QS -IT
Rev. 0.3 - 11-1-2013
1S9H57I