I primi convertitori in grado di controllare il flusso di energia
elettrica sono stati realizzati impiegando macchine elettriche
rotanti. Tali convertitori (convertitori rotanti), il più noto dei
quali è il gruppo Ward-Leonard, dal nome dell’Ingegnere
tedesco che lo realizzò nel 1891, hanno trovato ampia diffusione
in tutto il periodo che va dalla fine del diciannovesimo secolo
fino ad oltre la metà del ventesimo secolo.
Successivamente, i convertitori rotanti sono stati man mano
sostituiti con convertitori statici che presentano, rispetto a quelli
rotanti, indubbi vantaggi di costo, di affidabilità, di rendimento
e di manutenzione.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
1/62
Nei convertitori statici di potenza i semiconduttori vengono
sempre impiegati, al fine di ridurre l’energia dissipata nel
convertitore, in regime di commutazione; vengono cioè fatti
funzionare come un interruttore, alternativamente chiuso
(saturazione) e aperto (interdizione).
Una prima suddivisione dei semiconduttori impiegati nei
convertitori statici può essere effettuata considerando la
modalità di comando, mediante un opportuno circuito di
pilotaggio, del passaggio dallo stato di interdizione a quello di
conduzione ed del passaggio dallo stato di conduzione a quello
di interdizione.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
2/62
Sulla base della modalità di comando, i semiconduttori di
potenza possono, quindi, venire suddivisi in tre distinte famiglie:
1. componenti non controllati (diodi);
2. componenti di cui è possibile comandare solo il passaggio
dallo stato di interdizione a quello di conduzione
(Raddrizzatori Controllati al Silicio o Tiristori);
3. componenti di cui è possibile comandare, oltre alla chiusura,
anche il passaggio dallo stato di conduzione a quello di
interdizione (Transistor di Potenza BJT, MOSFET e IGBT).
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
3/62
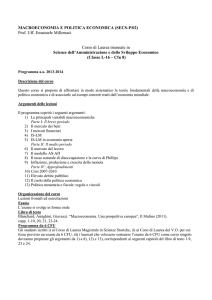
Caratteristica ideale
Anodo
Catodo
Quando la tensione tra anodo e catodo diventa positiva il Diodo
entra in conduzione (cioè conduce con una caduta di tensione
trascurabile). La conduzione prosegue fino a quando la corrente
anodica rimane positiva.
Quando la corrente anodica si annulla (o tende a diventare
negativa) il Diodo smette di condurre (stato di interdizione).
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
4/62
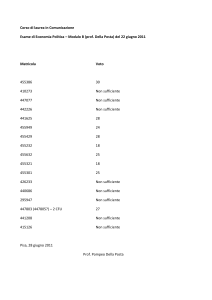
Il comportamento reale del diodo si discosta da quello ideale, sia durante
il funzionamento a regime permanente sia durante quello transitorio.
Ia = corrente anodica
Vak = tensione tra anodo e catodo
Quando il diodo è polarizzato direttamente la
Vak (caduta diretta) assume un valore
compreso tra 0.6V e qualche V che dipende:
• dal tipo di Diodo;
Caratteristica statica reale • dall’intensità della corrente Ia;
• dalla temperatura della giunzione.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
5/62
Nei convertitori a bassa tensione (fino al
centinaio di V) la caduta diretta dei Diodi
non può essere trascurata e può risultare
importante anche ai fini del funzionamento
del convertitore.
Nei convertitori a più elevata tensione,
invece, la caduta diretta dei Diodi risulta
Caratteristica statica reale importante solo ai fini del dimensionamento
termico del componente stesso mentre può,
in genere, essere trascurata nell’analisi del
funzionamento complessivo del circuito.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
6/62
Ia = corrente anodica
Vak = tensione tra anodo e catodo
Dualmente, quando al Diodo è applicata
una tensione negativa (tensione inversa)
nel Diodo fluisce una piccola corrente
negativa (corrente inversa).
Caratteristica inversa reale
Quando la tensione inversa diventa maggiore di Vb (massima
tensione inversa applicabile al Diodo o tensione di Breakdown) si ha
il cosiddetto effetto Zener e la corrente aumenta improvvisamente;
ciò comporta una elevata dissipazione all’interno del componente.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
7/62
Comportamento transitorio
commutazione diretta: passaggio dalla situazione di non conduzione, o
interdizione, a quella di conduzione.
commutazione inversa: passaggio dalla situazione di conduzione a quella
di interdizione.
Commutazione diretta
Se si applica un gradino di corrente con una elevata pendenza, Vak assume,
in un intervallo di tempo tfr (tempo di recupero diretto o forward recovery
time),un valore alquanto superiore alla Ed.
Nei convertitori statici di potenza tale fenomeno risulta in genere
trascurabile, in quanto le induttanze presenti nel circuito limitano il di/dt
applicato al Diodo a valori tali da non provocare apprezzabili cadute
durante la fase di commutazione diretta.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
8/62
Commutazione inversa
Nella commutazione inversa occorre che sia trascorso un breve intervallo di tempo
trr (tempo di recupero inverso o reverse recovery time) prima che il Diodo acquisti
la proprietà di blocco della corrente.
Il trr dipende da:
• caratteristiche del Diodo;
• corrente diretta prima della commutazione;
• di/dt durante il transitorio;
• temperatura della giunzione.
Nella fase di discesa di ia la Vak è circa nulla
mentre
si
presenta
una
Vak<0
in
corrispondenza alla salita della ia.
L’oscillazione è dovuta a fenomeni di
risonanza tra la capacità interna del Diodo e
le induttanze presenti nel circuito.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
9/62
Commutazione inversa
Per ricavare i valori della corrente inversa (Irm) e del tempo di recupero inverso si
possono usare formule approssimate per eccesso. Tali formule sono valide solo per i
Diodi veloci e sono ottenute approssimando l’andamento della corrente inversa con
un triangolo rettangolo e fanno riferimento alla quantità di carica inversa Qrr
(recovery stored charge) fornita dal Diodo durante la conduzione inversa.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
10/62
Commutazione inversa
Andamento di Qrr al variare del
di/dt
Andamento di Qrr al variare della
temperatura di giunzione
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
11/62
Commutazione inversa
Il fenomeno della conduzione inversa può provocare ai capi di altri
componenti del circuito:
• sovracorrenti;
• sovratensioni;
• maggiore dissipazione.
Si può ricorrere a Diodi veloci o Fast Recovery Diodes (trr molto piccolo)
per ridurre le sovracorrenti.
Svantaggio: la corrente inversa, dopo aver raggiunto il valore massimo Irm,
ritorna a zero con pendenze elevate che, in presenza di induttanze
rilevanti, provocano elevate sovratensioni sugli altri componenti.
Ulteriore soluzione: Soft Recovery Diodes che hanno un trr leggermente
più lungo di quello dei Diodi a commutazione brusca, presentano un
ritorno a zero della corrente più dolce.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
12/62
Basati su una giunzione metallo-semiconduttore. Tale tipo di giunzione non
permette il trasferimento di portatori minoritari dal semiconduttore al metallo; la
conduzione di corrente avviene solo per mezzo dei portatori maggioritari.
I Diodi Schottky presentano i seguenti vantaggi:
assenza di fenomeni dovuti alla ricombinazione di portatori, con conseguente
aumento della velocità di commutazione;
minore caduta diretta (in genere dell’ordine di un 1/3, ¼ di un Diodo a
giunzione).
Svantaggi:
corrente inversa e la capacità sono in genere alquanto più elevate;
bassa tensione di blocco inversa (150-200 V).
Limitato impiegato nei convertitori statici.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
13/62
Alcuni Diodi sono in grado di poter funzionare in maniera continuativa con
una tensione inversa uguale o leggermente maggiore alla loro tensione di
blocco inverso. Tale fenomeno viene utilizzato nei Diodi Zener, la cui
caratteristica di impiego è proprio quella di poter mantenere la tensione
inversa ad un valore circa costante.
La caratteristica diretta di un Diodo Zener è, invece, del tutto analoga a
quella di un Diodo normale.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
14/62
Portate in tensione e in corrente
• massimo picco ripetitivo di tensione inversa sopportabile dal diodo
(VRRM).
• massimo picco non ripetitivo di tensione inversa (VRSM);
• valore efficace di tensione inversa sopportabile durante il
funzionamento come raddrizzatore monofase (VRRMS);
• valore di corrente continuativa sopportabile (IAV);
• valore efficace di corrente sopportabile in varie situazioni operative
(IRMS);
• valore di picco di corrente non ripetitivo (IFSM);
• massima temperatura di lavoro della giunzione (θj);
• resistenza termica tra giunzione e contenitore (Rjc);
• potenza dissipata in varie situazioni operative.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
15/62
Dati relativi alla caratteristica statica
• curve Ia-Vak per differenti valori della temperatura di giunzione θj;
• curve IR-VR per differenti valori della temperatura di giunzione θj.
Dati relativi al comportamento transitorio
• resistenza termica transitoria r (t) per valutare il comportamento termico;
• l’area quadratica di corrente sopportabile (i2t) nel caso di sovraccarichi di
breve durata;
• andamento della capacità complessiva tra anodo e catodo;
• tempo di recupero inverso (trr ) e/o carica inversa (Qrr.).
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
16/62
I componenti a semiconduttore sono molto sensibili sia a sovracorrenti
che a sovratensioni; è dunque necessario provvedere ad adeguati sistemi
di protezione, che devono tenere conto non solo del singolo componente
ma dell’intero circuito di potenza.
Esempio: una brusca interruzione di corrente può provocare sovratensioni
a causa delle induttanze presenti nel circuito.
Non è possibile effettuare a livello di componente un esame adeguato dei
sistemi di protezione; pertanto la trattazione che sarà effettuata nel seguito
è pertanto solo indicativa di alcuni accorgimenti locali.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
17/62
Le principali cause di sovracorrenti in un componente sono:
• sovraccarichi o cortocircuiti che si verificano nel carico;
• mal funzionamenti o cortocircuiti all’interno del convertitore stesso.
Per non danneggiare il componente si ricorre a :
1. protezioni passive (fusibili o interruttori);
2. protezioni attive (intervento sul pilotaggio di componenti controllati).
L’efficienza della protezione dipende dal di/dt.
Quando è troppo elevato l’unica protezione passiva efficace è costituita dai
fusibili extra rapidi. Affinché l’intervento del fusibile garantisca la
protezione del componente, occorre che questo abbia interrotto
completamente la corrente prima che la sua area quadratica (i2t) abbia
raggiunto il valore limite ammissibile per il componente.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
18/62
Le principali cause di sovracorrenti in un componente sono:
• sovraccarichi o cortocircuiti che si verificano nel carico;
• mal funzionamenti o cortocircuiti all’interno del convertitore stesso.
Per non danneggiare il componente si ricorre a :
1. protezioni passive (fusibili o interruttori);
2. protezioni attive (intervento sul pilotaggio di componenti controllati).
L’efficienza della protezione dipende dal di/dt.
Quando è modesto (induttanze del circuito di valore elevato) anche un
interruttore extra rapido con circuito di sgancio magnetico (interruttore
magneto termico a semiconduttore) è sufficiente.
La caratteristica da considerare è la resistenza termica transitoria.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
19/62
Le sovratensioni che possono verificarsi su un componente quando si trova
interdetto possono essere dovute a varie cause quali:
• sovratensioni presenti sulla alimentazione;
• sovratensioni sulla linea di uscita (ad esempio dovute alla disinserzione di
un carico induttivo);
• commutazione o rottura di un altro componente del circuito.
Nei componenti controllati, si possono avere sovratensioni anche all’atto
dello spegnimento del componente stesso.
Il sistema di protezione contro le sovratensioni dovute alla alimentazione o
al carico è effettuato in maniera globale per l’intero circuito di conversione,
invece la protezione contro sovratensioni dovute a cause interne viene
realizzata singolarmente per ogni componente. Quest’ultima si basa
sull’inserzione di un circuito RC serie o di un soppressore di sovratensioni.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
20/62
Il comportamento ideale di un Transistor (per il quale si
impiegherà in seguito il simbolo del BJT), funzionante in
regime di commutazione può essere assimilato a quello un
interruttore (interruttore statico) di cui è possibile
comandare, agendo sulla corrente di base (corrente di
pilotaggio), sia l’apertura che la chiusura.
BJT di tipo NPN
Diversamente da un interruttore
elettromeccanico, però, la corrente
può circolare nel Transistor solo in
una direzione (cioè dal collettore
all’emettitore).
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
21/62
Il comportamento reale del BJT si discosta da quello ideale, sia durante il
funzionamento a regime permanente sia durante quello transitorio. Le
principali cause di scostamento dal comportamento ideale sono dovute:
• alla caduta diretta, quando il Transistor si trova in saturazione;
• ai fenomeni connessi alle commutazioni.
Quando invece il Transistor è interdetto, purché la tensione applicata sia
minore di quella di blocco, la corrente che lo attraversa risulta sempre del
tutto trascurabile al fine della valutazione sia del comportamento globale
del circuito sia delle perdite nel componente.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
22/62
La tensione Vce che si presenta tra collettore ed
emettitore quando il transistor lavora in
regime di saturazione dipende da:
• tipo di Transistor;
• temperatura di giunzione;
• corrente Ic di collettore;
• corrente Ib di pilotaggio.
Per una assegnata corrente di base, al crescere
della corrente di collettore l’andamento della
caduta diretta presenta inizialmente una
pendenza
abbastanza
modesta
che
successivamente aumenta in maniera quasi
improvvisa (uscita dalla zona di saturazione).
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
23/62
Commutazione dallo stato di interdizione a quello di saturazione
Applicando alla base di un transistor in
interdizione un gradino di corrente
inizialmente, nell’intervallo di tempo td
(delay time), questo continua a rimanere
interdetto. In seguito la corrente di collettore
inizia a crescere fino a raggiungere il valore
di regime corrispondente alla situazione di
saturazione.
Tale
comportamento
è
caratterizzato dal tempo di salita tr (tempo di
salita o rise time) solitamente maggiore di td.
Tempo di commutazione ton = td + tr .
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
24/62
Commutazione dallo stato di interdizione a quello di saturazione
Durante tr la Vce può assumere anche valori elevati e ciò causa una
consistente dissipazione di potenza sul transistor specie quando la
frequenza di commutazione è elevata (decine di kHz).
L’inserzione di un’induttanza collegata in serie al collettore riduce la
pendenza con la quale aumenta la corrente di collettore riducendo così le
perdite dovute alla commutazione.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
25/62
Commutazione dallo stato di saturazione a quello di interdizione
Quando un transistor in saturazione viene
portato in interdizione, la ic in un primo
intervallo di tempo di durata ts (storage
time), permane al valore precedente. In
seguito la ic inizia a diminuire con
pendenza praticamente costante.
Questo comportamento viene caratterizzato
dal tempo tf (tempo di discesa o fall time).
Anche ts e tf dipendono dal tipo di
transistor, dalla temperatura e dalle
caratteristiche del circuito di pilotaggio.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
26/62
Commutazione dallo stato di saturazione a quello di interdizione
Durante la fase di diminuzione della corrente la tensione presente tra
collettore ed emettitore è diversa da zero, ciò potrebbe causare elevate
dissipazioni di potenza le quali possono essere ridotte con l’inserimento di
una capacità collegata tra il collettore e l’emettitore del transistor.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
27/62
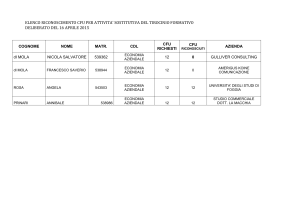
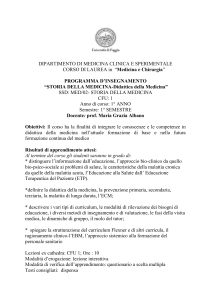
Nel funzionamento a regime permanente la zona di
impiego di un Transistor è definita come area di
sicurezza (Safe Operating ARea, SOAR).
Definisce la zona dove il BJT può lavorare in
maniera continuativa.
In un diagramma Ic-Vce tale area è limitata da
quattro curve:
• massima corrente continuativa sopportabile (IcM);
• massima tensione Vce sopportabile;
Andamento tipico della • massima potenza dissipabile Ic=Pd/Vce;
SOAR (log-log)
• breakdown secondario.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
28/62
• La massima corrente continuativa sopportabile è un valore indipendente dalla
tensione Vce. Essa è definita sulla base della massima densità di corrente
continuativa sopportabile dagli elementi che compongono l’assemblaggio del
Transistor.
• La massima tensione collettore-emettitore sopportabile dipende dalle modalità di
pilotaggio; nel definire la SOAR normalmente si fa riferimento alla Vceo cioè alla
massima tensione sopportabile con il circuito di base aperto (corrente di base
nulla).
• La curva di massima potenza dissipabile dipende dal dimensionamento del circuito
di raffreddamento e ha un andamento lineare. Per temperature del contenitore più
elevate la potenza dissipabile diminuisce in maniera lineare fino ad annullarsi in
corrispondenza alla massima temperatura ammissibile per la giunzione (θmax).
• Il breakdown secondario è un fenomeno di degrado termico che si verifica a causa
del gradiente di tensione lungo la base, in cui alcuni punti della giunzione
collettore-base raggiungono un valore termico instabile.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
29/62
I principali dati forniti dal costruttore possono essere suddivisi in due gruppi:
• dati relativi al comportamento statico;
• dati relativi al comportamento transitorio.
Comportamento statico
• la massima tensione applicabile tra collettore e base (Vcbo);
• la massima tensione inversa tra base ed emettitore (Vebo);
• la tensione di saturazione base-emettitore (Vbe sat);
• la tensione di saturazione collettore-emettitore (Vce sat);
• il rapporto minimo tra le correnti di collettore e di base;
• l’andamento della SOAR in funzionamento continuativo e impulsivo;
• la corrente di breakdown secondario (Is/b).
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
30/62
Comportamento transitorio
Per quanto riguarda il comportamento transitorio, vengono in genere
forniti:
• i tempi di commutazione td, tr, ts e tf , in corrispondenza a varie
condizioni operative;
• il valore della capacità Cbc, in corrispondenza a vari valori della
tensione Vce ;
• la resistenza termica transitoria.
Alcune volte viene anche riportato l’andamento della SOAR inversa.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
31/62
Il circuito di pilotaggio di un Transistor di potenza deve provvedere a:
1. fornire una corrente di pilotaggio sufficiente a mantenere il
transistor in saturazione, quando questo deve essere chiuso;
2. assicurare una buona commutazione del transistor.
Per soddisfare 1. il dispositivo di pilotaggio deve fornire una corrente
leggermente superiore a quella di saturazione del Transistor.
Per soddisfare 2. si deve imporre che il tempo di salita della corrente di
pilotaggio sia inferiore al tempo di ritardo del Transistor.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
32/62
In molti convertitori gli emettitori dei diversi Transistor di potenza non si
trovano tutti allo stesso potenziale. E’ necessario disaccoppiare
galvanicamente i circuiti di pilotaggio di almeno una parte dei Transistor dal
circuito di controllo dell’intero convertitore.
Il disaccoppiamento può essere ottenuto impiegando un trasformatore o un
accoppiatore ottico.
Il trasformatore può essere utilizzato per trasferire tutta la potenza necessaria
per il pilotaggio del Transistor oppure solo a livello di segnale.
L’accoppiatore ottico può essere utilizzato solo a livello di segnale.
Occorre inserire un apposito circuito affinché le tensioni di alimentazione dei
circuiti di pilotaggio siano disaccoppiate galvanicamente tra loro.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
33/62
In generale, i semiconduttori sono molto sensibili ad una
temperatura interna troppo elevata. Pertanto è necessario effettuare
un calcolo abbastanza preciso delle perdite al fine di poter
dimensionare il dispositivo di dissipazione atto allo smaltimento
del calore in modo da garantire che la temperatura di giunzione
non superi quella prevista per il componente ed evitare la rottura
del componente stesso.
La trattazione che verrà effettuata sui diodi è valida per tutti i
semiconduttori di potenza.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
34/62
Le perdite che si localizzano in un componente funzionante in regime di
commutazione possono essere suddivise in:
• perdite nello stato di conduzione dovute alla caduta di tensione diretta;
• perdite dovute alla corrente che attraversa il componente durante la fase di
interdizione;
• perdite dovute alle commutazioni dallo stato di interdizione a quello di
conduzione e viceversa;
• perdite dovute al pilotaggio (per i dispositivi controllati).
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
35/62
Per i Diodi il dimensionamento termico può essere effettuato prendendo in
considerazione solo le perdite dovute alla caduta di tensione durante il
funzionamento in conduzione. A causa dell’andamento non lineare della
caratteristica diretta, la determinazione esatta di tali perdite risulta alquanto
complessa. Limitandosi ad un calcolo di prima approssimazione, indicato
con T il periodo di ripetizione della corrente anodica, la potenza dissipata
sul Diodo risulta:
con
valore medio della corrente anodica e
il relativo valore efficace.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
36/62
Per i Diodi il dimensionamento termico può essere effettuato prendendo in
considerazione solo le perdite dovute alla caduta di tensione durante il
funzionamento in conduzione. A causa dell’andamento non lineare della
caratteristica diretta, la determinazione esatta di tali perdite risulta alquanto
complessa. Limitandosi ad un calcolo di prima approssimazione, indicato
con T il periodo di ripetizione della corrente anodica, la potenza dissipata
sul Diodo risulta:
con
valore medio della corrente anodica e
il relativo valore efficace.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
37/62
Il dispositivo di dissipazione può essere realizzato con varie tecniche di
raffreddamento:
• in aria libera nei convertitori di piccola potenza (qualche kW);
• in aria forzata per potenze maggiori, al fine di ridurre le dimensioni dei
dissipatori;
• raffreddamento mediante liquido (acqua o olio) per applicazioni di media e
elevata potenza.
Uno dei principali pregi del raffreddamento a liquido consiste, oltre che
nella riduzione dello spazio richiesto per il raffreddamento, nella possibilità
di convogliare l’aria lontano dall’apparecchiatura elettronica, evitando
accumuli di sporcizia all’interno di quest’ultima.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
38/62
Il dispositivo di dissipazione può essere realizzato con varie tecniche di
raffreddamento:
• in aria libera nei convertitori di piccola potenza (qualche kW);
• in aria forzata per potenze maggiori, al fine di ridurre le dimensioni dei
dissipatori;
• raffreddamento mediante liquido (acqua o olio) per applicazioni di media e
elevata potenza.
L’impiego dell’acqua consente un buono scambio termico ma presenta una
rigidità dielettrica insufficiente per garantire un adeguato isolamento
elettrico tra i vari componenti. Per contro, l’olio presenta una buona rigidità
dielettrica ma consente uno scambio termico nettamente inferiore.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
39/62
Una volta determinata la potenza dissipata nel componente e scelto il
dispositivo di dissipazione, è possibile ricavare il valore della
temperatura all’interno del semiconduttore considerando due distinte
situazioni:
• funzionamento a regime permanente;
• funzionamento transitorio, dovuto ad un sovraccarico di breve
durata.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
40/62
Funzionamento a regime permanente
La determinazione della temperatura interna durante
il funzionamento a regime permanente richiede la
conoscenza delle potenza dissipata, della
temperatura ambiente e delle seguenti tre resistenze
termiche:
• Rθjc tra la giunzione e il contenitore che dipende
dal componente;
• Rθcd tra il contenitore e il dissipatore che dipende
dalle modalità di fissaggio del componente
all’elemento di dissipazione;
• Rθda tra il dissipatore e l’ambiente esterno dipende
dal tipo di dissipatore e dalla modalità di
raffreddamento (aria o liquido).
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
41/62
Funzionamento a regime permanente
MOSFET
con dissipatore
Resistenza termica al variare della
potenza dissipata.
Resistenza termica al variare della
velocità dell’aria.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
42/62
Funzionamento a regime permanente
Note le resistenze termiche e la potenza dissipata Pd, la temperatura di
giunzione può essere ottenuta dalla seguente relazione:
dove θa è la temperatura ambiente e Rθja = Rθjc + Rθcd + Rθda è la resistenza
termica tra giunzione e ambiente.
Da questa relazione è possibile ricavare l’analogia con un circuito elettrico.
Nota: la Rθja del componente in assenza di dissipatore è più elevata di quella
che si ha con l’uso del dissipatore.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
43/62
Funzionamento in transitorio
Nel caso di sovraccarichi di breve durata bisogna prendere in considerazione
anche le capacità termiche dei vari elementi.
Il circuito equivalente con capacità concentrate è valido solo per fenomeni
di durata relativamente elevata (qualche s).
Per fenomeni di durata inferiore è necessario ricorrere ad una suddivisione
più fitta delle capacità ottenendo uno schema composto da 6 /7 celle RC.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
44/62
Funzionamento in transitorio
Molto spesso il costruttore fornisce una resistenza termica transitoria.
dipendenza solo dal componente
(1) contenitore a temperatura costante;
(2) ventilazione forzata v = 3 m/s;
(3) dissipazione in aria libera.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
45/62
Funzionamento in transitorio
Nota la resistenza transitoria, si può immediatamente ricavare la temperatura
di giunzione dovuta ad un sovraccarico di breve durata:
dove
Ts è la durata del sovraccarico,
θs la temperatura di giunzione alla fine del sovraccarico,
θp la temperatura a cui si trovava la giunzione prima del sovraccarico,
Ps la potenza dissipata durante il sovraccarico,
Pp la potenza dissipata prima del sovraccarico.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
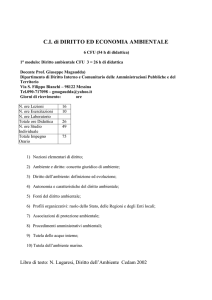
46/62
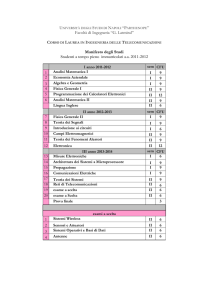
Caratteristiche statiche di un MOSFET
Simbolo grafico del MOSFET
Circuito semplificato di un MOSFET
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
47/62
Vantaggi
• Tempi di commutazione
(e quindi perdite) notevolmente
più piccoli;
• corrente di pilotaggio a regime
estremamente ridotta;
• non presentano fenomeni di
breakdown secondario;
• collegamento in parallelo senza
particolari accorgimenti.
Svantaggi
• Caduta di tensione diretta maggiore;
• per ridurre i tempi di commutazione
(dipendenti dalla presenza di CGD) è
necessario che il circuito di pilotaggio
presenti una piccola impedenza serie;
• non sopporta sovratensioni anche di
breve durata;
• limiti sulla massima tensione
sopportabile tra Gate e Source;
• impiegati per tensioni fino a qualche
centinaio di Volt.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
48/62
IGBT (Insulated Gate Bipolar Transistor )
Componenti che sfruttino i vantaggi delle tecnologie bipolare e ad effetto di campo
integrando BJT e MOSFET.
Tale architettura conferisce al dispositivo la caratteristica di alta impedenza di
ingresso, tipica del MOSFET, e una capacità di conduzione della corrente simile a
quella di un BJT.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
49/62
Vantaggi
Le principali caratteristiche che rendono vantaggioso l’impiego degli
IGBT sono le seguenti:
• pilotaggio simile a quello di un MOSFET (con assorbimento di corrente
solo durante le commutazioni);
• tempi di commutazione molto contenuti rispetto a quelli di un BJT di
uguale portata (in genere inferiori al ms);
• tensioni massime sopportabili molto maggiori di quelle applicabili ad un
MOSFET, senza pesante degrado delle prestazioni;
• minori problemi, rispetto ad un BJT, per soddisfare i requisiti connessi
alla SOAR inversa.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
50/62
Comportamento ideale
Gli SCR (Silicon Controlled Rectifier) o Tiristori rappresentano il
componente fondamentale per i convertitori di più alta potenza e per molti
dei convertitori alimentati in corrente alternata.
Idealmente possono essere considerati come degli interruttori che possono
condurre in un’unica direzione e di cui è possibile comandare solo la
chiusura. L’apertura è invece determinata solo dal circuito di potenza al
quale è connesso.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
51/62
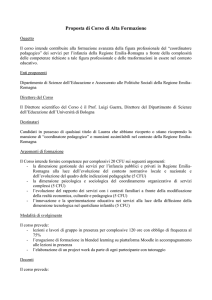
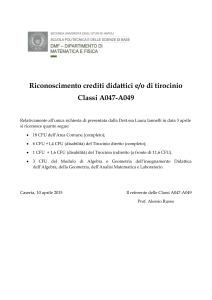
Caratteristiche statiche
Ih
Vd
Vak = tensione applicata fra anodo e catodo
Vak = tensione di picco diretta
Ia = corrente che fluisce nel componente
Ig = corrente applicata all’elettrodo di controllo
Ih = corrente di tenuta (hold)
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
52/62
Comportamento transitorio
Il passaggio dallo stato di conduzione a quello di interdizione
(spegnimento) non può essere controllato agendo sull’elettrodo di controllo
ma dipende solo dal circuito anodico e richiede un tempo ts di spegnimento.
I Tiristori possono essere suddivisi in due distinte famiglie:
• Tiristori lenti (o per commutazione da rete) che presentano un tempo di
spegnimento compreso tra alcune decine di s (per i Tiristori di
piccolissima potenza) a svariate centinaia di s;
• Tiristori veloci (o per commutazione forzata) che presentano tempi di
spegnimento ridotti.
Il tempo di spegnimento aumenta all’aumentare della temperatura e della
corrente anodica mentre diminuisce all’aumentare della velocità di discesa
della corrente, della tensione inversa applicata tra anodo e catodo e della
polarizzazione inversa dell’elettrodo di controllo.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
53/62
Comportamento transitorio
A seconda della velocità di discesa della corrente anodica e del
valore della tensione inversa applicata al Tiristore si possono
individuare tre diverse modalità di spegnimento:
• statico;
• quasi statico;
• forzato.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
54/62
Spegnimento statico
Lo spegnimento statico è lo spegnimento tipico dei circuiti in cui
la corrente presenta un andamento decrescente in maniera
esponenziale ed è caratterizzato da una lenta discesa della corrente
al di sotto della corrente di tenuta, senza che il Tiristore risulti mai
contropolarizzato. Tra i vari tipi di spegnimento, questo è quello
che presenta il tempo di spegnimento più lungo.
Per contro, le perdite di commutazione dovute allo spegnimento
sono del tutto trascurabili.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
55/62
Spegnimento quasi statico
Lo spegnimento quasi statico è caratterizzato da una diminuzione
non eccessivamente veloce della corrente anodica e/o da una
controtensione modesta o comunque con un dv/dt limitato.
La maggiore velocità di discesa della corrente e l’eventuale
applicazione di una controtensione riducono in maniera
consistente la durata del tempo di spegnimento, rispetto a quella
della modalità precedente. Anche in questo tipo di spegnimento,
l’assenza di una contropolarizzazione riduce a valori praticamente
trascurabili le perdite localizzate nel semiconduttore durante lo
spegnimento.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
56/62
Spegnimento forzato
Lo spegnimento forzato è caratterizzato dalla applicazione di una
controtensione con un dv/dt elevato che viene normalmente ottenuta
chiudendo in parallelo al Tiristore un generatore con una bassa impedenza
interna. Questo tipo di spegnimento permette di minimizzare la durata del
tempo di spegnimento, ma presenta l’inconveniente di provocare delle
perdite consistenti nel semiconduttore.
Il circuito ausiliario di spegnimento
permette l’utilizzo di Tiristori come
interruttori
statici
completamente
comandati.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
57/62
Per realizzare un interruttore bidirezionale si possono impiegare due
Tiristori collegati in antiparallelo. Per bassi valori di V ed I (8001000V, 40-50A) i due Tiristori possono essere sostituiti da un unico
componente chiamato Triac, integrato in una unica pasticca di silicio
con un unico elettrodo di controllo.
Un Triac viene distinto a seconda dei quadranti necessari per
l’accensione:
• a due quadranti, se l’impulso di pilotaggio deve avere lo stesso
segno della corrente anodica;
• a tre quadranti, per la conduzione sia di corrente anodica positiva
sia di corrente negativa con un’unica polarità del pilotaggio;
• a quattro quadranti, se un impulso di pilotaggio di polarità qualsiasi
permette di ottenere una conduzione in entrambi i versi.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
58/62
Comportamento statico
• Massimo picco ripetitivo di tensione inversa sopportabile (VRRM);
• massimo picco non ripetitivo di tensione inversa (VRSM);
• massimo valore di tensione diretta (VDRM) per il quale, in assenza di pilotaggio, è
garantita la non accensione del Tiristore;
• il valore di corrente continuativa sopportabile (IAV);
• il valore efficace di corrente sopportabile in varie situazioni operative (IRMS);
• il valore di picco non ripetitivo (IFSM);
• la potenza dissipata in varie situazioni operative;
• la caduta diretta Vak in funzione della corrente anodica;
• la corrente inversa corrispondente alla massima tensione inversa applicabile;
• le caratteristiche dell’elettrodo di controllo (area in cui è compresa la caratteristica,
area di possibile accensione);
• la massima temperatura a cui il semiconduttore può lavorare;
• la resistenza termica tra semiconduttore e contenitore (Rθjc).
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
59/62
Comportamento transitorio
• i valori dei tempi relativi alla accensione;
• il valore del massimo di/dt sopportabile durante l’accensione;
• il valore del massimo dv/dt, per il quale è garantita la non accensione;
• il valore del tempo di spegnimento (ts), con una o più modalità di
spegnimento;
• l’andamento della capacità tra anodo e catodo, al variare della tensione
applicata;
• il valore del tempo di recupero o quello della carica inversa;
• la resistenza termica transitoria tra giunzione e contenitore rθ(t);
• l’area quadratica (i2t) di corrente sopportabile in caso di sovraccarico;
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
60/62
Struttura dei GTO
Il GTO è un componente derivato dai Tiristori per il quale è possibile
comandare anche lo spegnimento. E’ utilizzato per potenze elevate ma ha
basse prestazioni dinamiche.
La struttura di un GTO può essere approssimata come costituita da un
elevato numero di Tiristori elementari posti in parallelo tra loro.
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
61/62
Corso di Elettronica di Potenza (9 CFU) ed Elettronica Industriale (6 CFU) – Componenti
62/62