Scuola Politecnica e delle Scienze di Base
Corso di Laurea in Ingegneria Informatica
Elaborato finale in Programmazione I
Modelli di programmazione per il calcolo parallelo
Parallel programming models
Anno Accademico 2015/16
candidato
Michele Caggiano
matr. N46001601
"Ora non è il momento di pensare
a quello che non hai. Pensa a quello che puoi fare con quello che hai." ­ Ernest Hemingway
Alla mia famiglia, ai miei compagni di viaggio, a chi mi ha supportato e a chi mi sopporta.
2
Indice
Indice....................................................................................................................................................3
Introduzione..........................................................................................................................................4
Capitolo 1: L'evoluzione del modello architetturale............................................................................5
1.1 Dal sequenziale al parallelo........................................................................................................5
1.2 Lo sviluppo tecnologico: il general purpose many core.............................................................6
Capitolo 2: I modelli per la programmazione parallela........................................................................8
2.1 Il modello pipeline......................................................................................................................8
2.2 Il modello master-slave..............................................................................................................9
Capitolo 3: Il mondo della GP-GPU..................................................................................................10
3.1 La tassonomia di Flynn.............................................................................................................10
3.2 L'architettura di una GPU.........................................................................................................11
3.3 Lo scontro generazionale: GP-GPU vs CPU............................................................................13
3.4 I modelli di programmazione su GP-GPU...............................................................................14
Capitolo 4: CUDA..............................................................................................................................15
4.1 La gestione dei thread in CUDA..............................................................................................15
4.2 L'organizzazione gerarchica della memoria in CUDA.............................................................16
4.3 La struttura di un codice CUDA...............................................................................................18
4.4 Implementazione di CUDA in C..............................................................................................19
4.5 Esempio di codice CUDA C.....................................................................................................21
4.5.1 provaCUDA.cu..................................................................................................................22
4.5.2 Analisi del codice..............................................................................................................26
4.5.3 Esecuzione su Nsight.........................................................................................................29
4.5.4 Profiling.............................................................................................................................29
4.5.5 Confronto con codice sequenziale di funzionalità equivalente.........................................32
Conclusioni.........................................................................................................................................35
Sviluppi Futuri....................................................................................................................................37
Bibliografia.........................................................................................................................................38
3
Introduzione
Questo elaborato è stato redatto al fine di presentare la natura architetturale ed il recente
sviluppo dei modelli di programmazione per il calcolo parallelo. Quest'ultima è una
tecnica informatica nata dall'evoluzione della classica programmazione sequenziale e
basata sull'esecuzione simultanea e concorrente del codice sorgente di uno o più
programmi, allo scopo di aumentare le prestazioni del calcolo attraverso l'ottimizzazione
dell'uso delle risorse a disposizione e del relativo tempo di esecuzione, pur necessitando di
una maggiore capacità del programmatore nel dividere e specificamente adattare su più
microprocessori o più core dello stesso processore le istruzioni da eseguire. Il processo
evolutivo a cui si fa riferimento nel primo capitolo di questa tesi è molto evidente
nell'emblematico passaggio dalla centralizzazione dell'elaborazione sulla CPU (“Central
Processing Unit”) alle tecniche di co-processing tra CPU e GPU (“Graphic Processing
Unit”) che permette netti aumenti delle prestazioni di computing grazie allo sfruttamento
della potenza di calcolo delle GPU. Questo lavoro di tesi, inoltre, presenta un'analisi
generale dei principali modelli di programmazione parallela definiti nel corso degli anni
all'interno del settore della ricerca informatica e volge particolare attenzione ad una delle
più recenti piattaforme di elaborazione in parallelo introdotte dalla NVIDIA Corporation e
denominata CUDA (“Compute Unified Device Architecture”) che sfrutta linguaggi di
programmazione ad alto livello ed aumenta esponenzialmente le performance di calcolo di
sistemi di svariata natura (scientifica, grafica, finanziaria, etc.). Nelle ultime pagine di
questo lavoro, infine, si evidenziano i vantaggi esecutivi effettivi e le potenzialità future
più importanti dell'applicazione del modello di programmazione parallela in confronto con
il tradizionale codice sequenziale attraverso un esempio di implementazione applicativa
basato sul linguaggio C.
4
Capitolo 1: L'evoluzione del modello architetturale
I modelli di programmazione si sono evoluti nel corso del tempo di pari passo con la
scienza informatica della quale fanno parte. Tali sviluppi si sono resi evidenti con le
mutazioni che i modelli architetturali, ovvero l'insieme di caratteristiche che determinano
le funzionalità dei vari componenti informatici, hanno subito. Tra tutti il processore è
sicuramente quello di maggiore interesse e, al fine di comprendere in maniera migliore
l'efficacia dei modelli, c'è bisogno di conoscere i passaggi evolutivi che hanno interessato
l'architettura di questo componente nevralgico nell'economia di un sistema informatico.
1.1 Dal sequenziale al parallelo
Fino ai primi anni 2000 il modello architetturale del processore è rimasto pressoché
invariato: si trattava, infatti, di un modello sequenziale nel quale un insieme di
componenti hardware era in grado di eseguire le istruzioni di un unico programma alla
volta. Tale modello architetturale si è evoluto grazie alla sempre maggiore densità di
componenti elettronici sul silicio di cui è composto, in concordanza con la legge di Moore,
formulata negli anni '60 da Gordon Moore e rispettata tuttora, che stabilisce che il numero
di componenti su una certa superficie di silicio raddoppia ogni due anni per via dei
miglioramenti delle tecnologie di produzione. Questi miglioramenti, però, non hanno
portato esclusivamente ad una costruzione di modelli architetturali che occupassero
porzioni di chip sempre maggiori, ma anche ad una tendenza alla miniaturizzazione dei
componenti e alla possibilità di lavorare a frequenze di clock sempre più elevate. Questo
andamento ha subito un brusco rallentamento proprio nei primi anni 2000 per due ragioni
fondamentali:
•
non si è stati più in grado di trovare miglioramenti architetturali che portassero ad
un incremento delle prestazioni proporzionale all'area di silicio occupata per
introdurli;
•
l'utilizzo di frequenze di clock sempre più elevate ha introdotto notevoli problemi
5
di consumo e di dissipazione termica.
A questo punto i produttori si sono trovati in una situazione che vedeva da una parte la
possibilità di realizzare componenti di calcolo sempre più complessi su un singolo chip e
dall'altra parte la difficoltà oggettiva a realizzarli all'interno del modello architetturale
sequenziale utilizzato fino a quel momento. Di fronte a questo criticismo si è delineata
l'idea di accantonare il modello sequenziale stesso: non si è cercato, quindi, di produrre
componenti che eseguissero le istruzioni di un singolo programma sempre più
velocemente, ma si sono sfruttate le potenzialità della tecnologia a disposizione per
produrre sullo stesso chip più core, ossia più componenti, che, operando in maniera
combinata e sfruttando un sottosistema di memoria comune, fossero in grado di eseguire
più istruzioni parallelamente.
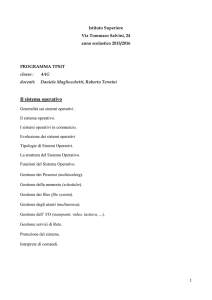
Figura 1.1: confronto tra modello sequenziale e paralello
1.2 Lo sviluppo tecnologico: il general purpose many core
Viene così segnato un nuovo solco particolarmente profondo nell'approccio al codice da
parte del programmatore: quest'ultimo, infatti, non tende più a concepire il proprio
programma come una serie di istruzioni eseguite sequenzialmente, ma deve pensare ad
esso come ad un insieme di attività da coordinare esplicitamente ed in grado di essere
eseguite in modo autonomo. Questa metodologia di programmazione diventa obbligatoria
nel momento in cui il progresso tecnologico di produzione dei chip porta all'eliminazione
dall'area di silicio di tutti quei componenti che introducevano miglioramenti minimi a
6
fronte dello spazio occupato, al fine di far posto ad un numero maggiore di core sulla
superficie a disposizione. Si determina così la nascita dei cosiddetti general purpose
many core, che dispongono di decine o addirittura centinaia di core ottimizzati per
l'esecuzione parallela di più flussi di controllo. È importante notare che, eseguendo un
programma implementato appositamente per un processore single core su uno dei core di
un processore many core, si otterrebbero prestazioni leggermente inferiori. L'avanzamento
tecnologico non si ferma, però, solo a queste innovazioni architetturali, ma include anche
la diffusione di nuove componenti che si adattano perfettamente alle esigenze della
programmazione parallela. Queste novità sono:
•
le GPU (Graphics Processing Unit), ovvero acceleratori in grado di processare
molto velocemente tutte le operazioni tipiche della grafica computazionale, che
utilizzano migliaia di componenti capaci di eseguire ciascuno semplici operazioni
su un singolo pixel dell'immagine;
•
le FPGA (Field Programmable Gate Array), ovvero dispositivi programmabili via
software formati da migliaia di porte logiche che permettono l'implementazione di
funzioni logiche anche abbastanza complesse. La loro programmazione è realizzata
attraverso linguaggi descrittivi come VHDL o Verilog, i quali richiedono una
profonda conoscenza del dispositivo stesso.
Entrambe queste tecnologie erano inizialmente messe a disposizione come componenti
che interagivano con la CPU attraverso il bus del processore, ma successivamente ci si è
resi conto che, soprattutto in riferimento alle GPUs, potessero essere più efficaci se
programmate ad-hoc per eseguire particolari tipi di computazioni, anche non
esclusivamente grafiche. Nacquero così le cosiddette GP-GPU (General Purpose-GPU),
che tutt'oggi sono molto impiegate nei sistemi informatici più all'avanguardia.
7
Capitolo 2: I modelli per la programmazione parallela
Fin dagli anni '90 ci si è resi conto che molte applicazioni parallele in realtà sfruttavano
modelli computazionali profondamente simili tra loro. Si è reputato utile, quindi, definire
alcuni pattern, ossia schemi prestabiliti per la risoluzione di algoritmi specifici, che
organizzassero le modalità di creazione ed interazione delle varie azioni svolte
parallelamente e che ora andiamo brevemente ad analizzare.
2.1 Il modello pipeline
Il modello pipeline è basato su stadi che si susseguono e che hanno il compito di calcolare
risultati parziali che si avvicinano sempre più al risultato finale dell'operazione da
effettuare e che siano posti in ingresso allo stadio immediatamente successivo. In termini
di programmazione parallela, l'idea è di assegnare ciascuno stadio ad una unità di
elaborazione e provvedere ad implementare un meccanismo per il quale ogni stadio possa
interagire con lo stadio successivo attraverso un invio di dati. Questo modello è
particolarmente utilizzato nelle applicazioni di calcolo matematico e nel video processing
o comunque risulta molto valido se gli stadi della pipeline sono tutti computazionalmente
equivalenti, altrimenti stadi meno onerosi potrebbero dare vita ad effetti “a collo di
bottiglia”.
Figura 2.1: operazioni di un modello pipeline
8
2.2 Il modello master­slave
Nel modello master-slave un'attività, che prende il nome di master, distribuisce
l'esecuzione dei vari task ad un insieme di più attività, ciascuna denominata slave, che
restituiranno il risultato dell'elaborazione al master. Questo pattern è particolarmente
utilizzato nell'ambito di applicazioni che prevedono una serie di elaborazioni che possono
essere eseguite indipendentemente l'una dall'altra e in maniera parallela, come per esempio
il calcolo della moltiplicazione tra due matrici.
Figura 2.2: operazioni di un modello master-slave
9
Capitolo 3: Il mondo della GP-GPU
La GPU è particolarmente efficace nel calcolo di tutte quelle operazioni che richiedono
l'esecuzione di una singola funzione su tutti gli elementi di un vettore o di una matrice,
grazie all'elevata potenza di calcolo dovuta alla presenza di migliaia di componenti su un
unico chip. Ben presto questa unità ha abbandonato la semplice elaborazione grafica per
essere destinata ad ambiti più generali, evolvendosi in GP-GPU, ovvero un nuovo settore
della ricerca informatica che ha come scopo l'utilizzo del processore della scheda grafica
in modo da accelerare notevolmente l'esecuzione di calcoli data parallel, ovvero calcoli il
cui risultato dipende da un insieme di risultati parziali ottenuti attraverso computazioni
indipendenti eseguite in maniera altamente parallela su partizioni del dato in input. Prima
di analizzare nel dettaglio l'architettura di una GPU, può essere sicuramente utile chiarire
la distinzione tra le varie tipologie di architetture dei calcolatori esistenti. Tale
classificazione prende il nome di tassonomia di Flynn.
3.1 La tassonomia di Flynn
Nel 1966 Michael J. Flynn ha classificato i sistemi di calcolo a seconda della molteplicità
del flusso di istruzioni e del flusso dei dati che possono gestire. Nella tassonomia di Flynn
sono presenti quattro diverse categorie:
•
SISD (Single Instruction, Single Data): in un sistema SISD (e.g., macchina di Von
Neumann) un singolo stream di istruzioni processa un singolo flusso di dati senza
alcun tipo di parallelismo;
•
SIMD (Single Instruction, Multiple Data): un sistema SIMD (e.g., supercomputer
vettoriali) prevede che un singolo stream di istruzioni venga trasmesso
contemporaneamente a più unità di elaborazione, ognuna caratterizzata da un
proprio flusso di dati. Tale sistema è molto utilizzato per applicazioni con
parallelismo a grana fine, ossia gestito in maniera del tutto trasparente al
programmatore, o con semplici comunicazioni tra processi;
10
•
MISD (Multiple Instruction, Single Data): un sistema MISD è basato su più flussi
di istruzioni che lavorano contemporaneamente su un singolo stream di dati. Tale
sistema non ha ancora trovato un'implementazione pratica;
•
MIMD (Multiple Instruction, Multiple Data): in un sistema MIMD (e.g., cluster di
computer) più flussi di istruzioni vengono eseguiti contemporaneamente su più
flussi di dati. L'architettura della maggior parte dei più moderni sistemi paralleli
richiama questo schema e si è soliti suddividere questa categoria in sotto-categorie
discriminando l'architettura della memoria a disposizione.
Figura 3.1: tassonomia di Flynn
3.2 L'architettura di una GPU
Ma perché la GPU ha sostituito la CPU come processore di riferimento nell'ambito della
programmazione parallela? La risposta a questa domanda è racchiusa all'interno
dell'architettura della GPU stessa: l'unità di elaborazione grafica, infatti, al contrario della
CPU, presenta un numero molto elevato di processori relativamente semplici che basano
la propria efficienza sull'esecuzione parallela di moltissimi thread, anziché sull'esecuzione
ottimizzata di un unico processo. Tale architettura è basata sulla struttura definita SIMT
(Single Instruction, Multiple Thread) che non è altro che un'estensione del concetto
precedentemente discusso di SIMD. Il funzionamento di una GPU è legato all'esecuzione
fisica in parallelo di blocchi di thread, chiamati warp, da parte di più SM (Streaming
Multiprocessor). Se ciascun SM deve eseguire più blocchi di thread, un componente
interno chiamato warp scheduler li partiziona in singoli warp di grandezza fissa in base
all'ID dei thread, iniziando dal thread con ID 0 e proseguendo consecutivamente. Ciascuno
11
di questi SM racchiude al suo interno tre tipologie di unità di esecuzione:
•
otto processori scalari (SP) che eseguono operazioni aritmetico-logiche in virgola
mobile e virgola fissa;
•
due unità funzionali speciali (SFU) che eseguono varie funzioni matematiche oltre
alla moltiplicazione in virgola mobile;
•
un'unità di doppia precisione (DPU) che esegue operazioni aritmetiche su operandi
in virgola mobile di 64 bit.
Gruppi di SM appartengono a Thread Processing Clusters (TPC) che contengono anche
altre risorse hardware tipiche delle applicazioni grafiche e in genere non visibili al
programmatore.
Figura 3.2: visione di dettaglio dell'architettura di una GPU
La GPU è costituita dall'insieme dei TPC, dalla rete di interconnessione e dai controllori
della memoria esterna.
Figura 3.3: visione globale dell'architettura di una GPU
12
3.3 Lo scontro generazionale: GP­GPU vs CPU
Dopo aver analizzato il processore grafico nel dettaglio a livello architetturale passiamo a
confrontarlo con la CPU a livello di performance. Facendo riferimento al grafico
sottostante, possiamo facilmente intuire che, in termini di Gflops/s, ossia il numero di
operazioni in virgola mobile eseguite al secondo, il divario tra CPUs e GPUs è in costante
crescita, sebbene entrambe le tecnologie siano segnate da un processo evolutivo in
costante ascesa.
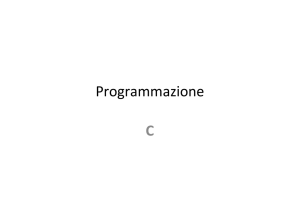
Figura 3.4: confronto delle performance tra GPUs e CPUs
Il divario tra le diverse architetture e, di conseguenza, tra le performance delle due
tipologie di processori è ancora più netto se andiamo a confrontare due modelli di
processore pressoché coetanei come l'Intel Core 2 Extreme QX9650 (CPU, 2009) e la
NVIDIA GeForce GTX 280 (GPU, 2008). La scheda sottostante ci mette in risalto come la
differenza architetturale basata sulla maggiore quantità ma minore complessità dei
componenti presenti sulla GPU sia decisiva anche a livello prestazionale. Fattori come il
minor numero di context switch, la minore latenza o i livelli di memoria cache a
disposizione hanno decretato la preferenza riguardo l'uso delle GPU come processori a
tutto tondo nell'ambito di una programmazione fortemente parallela.
13
Figura 3.5: confronto tra modelli specifici di GPU e CPU
3.4 I modelli di programmazione su GP­GPU
Anche se, come abbiamo constatato nei paragrafi precedenti, i processori grafici sono
nettamente più efficienti delle CPU, l'approccio odierno è comunque un approccio ibrido e
congiunto tra le due unità di elaborazione principali. L'interazione tra le due componenti è
possibile attraverso lo sfruttamento di un'area di memoria condivisa che permette di
scambiare esclusivamente i riferimenti agli oggetti e non intere copie degli stessi, evitando
la latenza dovuta ai trasferimenti. Tutto questo è possibile attraverso la Application
Programming Interface (API) messa a disposizione dal modello di programmazione. Le
piattaforme più recenti ed efficienti su GP-GPU sono OpenCL e CUDA: il primo è un
framework multi-piattaforma basato sul linguaggio C o C++ portato a compimento dal
consorzio no-profit Khronos Group; il secondo è una piattaforma ideata e sviluppata
completamente da NVIDIA Corporation e destinata all'uso esclusivo su schede grafiche
prodotte dall'azienda statunitense stessa. Oltre ad offrire un nuovo modello architetturale
orientato all'alto tasso di parallelismo, CUDA permette di utilizzare una API e diversi
linguaggi di programmazione ad alto livello, per sfruttare il processore grafico a tutto
tondo.
14
Capitolo 4: CUDA
Nel novembre 2006 la NVIDIA Corporation ha presentato CUDA, una piattaforma di
calcolo parallelo general purpose e modello di programmazione che permette di
demandare la risoluzione di problemi computazionali di natura altamente parallela al
processore posto all'interno della GPU NVIDIA. Tale piattaforma fornisce una serie di
strumenti per facilitarne la programmazione, tra i quali un supporto software, scaricabile
all'interno del CUDA Toolkit dal sito web ufficiale della casa produttrice statunitense, che
comprende un ambiente di sviluppo denominato Nsight, il quale permette anche di
analizzare dettagliatamente il proprio programma attraverso un visual profiler, e un
compilatore apposito (nvcc) che permette di programmare sia direttamente a livello di
architettura, sia con linguaggi di programmazione ad alto livello. CUDA introduce un set
di istruzioni assembly a più alto livello, denominato Parallel Thread Execution (PTX), che
esula anche dallo specifico dispositivo utilizzato e semplifica il processo compilativo. In
questo capitolo, infine, verrà valutato un esempio di codice in CUDA C, ossia
un'estensione del classico linguaggio C con una API studiata appositamente da NVIDIA,
che verrà analizzato nei suoi aspetti più significativi e confrontato con un codice C
sequenziale.
4.1 La gestione dei thread in CUDA
Sebbene la piattaforma CUDA sia esclusivamente destinata a prodotti NVIDIA, le
architetture delle varie generazioni di schede grafiche cambiano costantemente, soprattutto
per quanto riguarda il numero di microprocessori operanti, rispettando l'andamento
pronosticato dalla legge di Moore. Per fronteggiare questo processo evolutivo senza troppi
sforzi per il compilatore, CUDA prevede la suddivisione del programma multithread in
una serie di blocchi indipendenti fra loro (blocks) che risiedono tutti sullo stesso
multiprocessore ma ognuno eseguito da un singolo SM e dotato di una porzione di
memoria propria. L'insieme di blocks è organizzato logicamente in griglie (grids) e
15
ciascun blocco contiene un numero limitato di thread a seconda delle dimensioni del
multiprocessore, ma comunque non superiore a 1024 thread.
Nei capitoli precedenti si è già discusso approfonditamente dell'architettura di una GPU
generica: in questo caso, ogni multiprocessore di una GPU CUDA-Enabled gestisce warp
composti da 32 thread che iniziano fisicamente l'esecuzione in parallelo. L'intero contesto
di esecuzione (program counters, registri, etc.) di ogni warp è mantenuto in memoria per
l'intero ciclo di vita del warp stesso, ottimizzando il numero e il costo dei context switch.
Ad ogni iterazione il warp scheduler seleziona il warp che ha thread pronti ad eseguire la
prossima istruzione tra i cosiddetti active threads. In particolare, ogni microprocessore ha
un set di registri a 32 bit da dividere tra i warp e una porzione di memoria condivisa
(shared memory) tra i blocchi di thread alla quale questi ultimi possono accedere venendo
sincronizzati esplicitamente dal programmatore.
Figura 4.1: esempio di gestione bidimensionale dei thread in CUDA
4.2 L'organizzazione gerarchica della memoria in CUDA
L'elevata efficienza dell'architettura CUDA, però, non è dovuta esclusivamente alla
gestione ottimizzata dei thread. Le performance di un codice CUDA sono ulteriormente
migliorate dall'organizzazione gerarchica della memoria a disposizione, che fornisce una
notevole flessibilità di utilizzo e permette di ottimizzare la velocità di accesso ai dati ed il
16
transfer rate tra memoria e processore, contribuendo anche a minimizzare l'effetto
bottleneck nei trasferimenti di dati. Su un'architettura CUDA, infatti, sono disponibili le
seguenti aree di memoria:
•
local memory: memoria a rapido accesso locale ai singoli thread;
•
registers: insieme di registri a rapidissimo accesso senza latenza locali ai singoli
thread;
•
shared memory: memoria a rapido accesso con visibilità globale ai thread di un
blocco e locale a ciascun blocco e con durata pari. Viene principalmente utilizzata
per operazioni di lettura/scrittura comuni a più thread appartenenti ad un singolo
blocco e la sua dimensione è diversa a seconda della versione di compute capability
del dispositivo che esegue il programma, passando, infatti, dai 16 kB montati su
ogni core dei chip versione 1.x ai 96 kB equipaggiati da quelli versione 5.2;
•
global memory: memoria con visibilità globale a tutti i thread dell'applicazione e
all'host, il quale ne gestisce allocazione e de-allocazione;
•
constant memory e texture memory: memorie a sola lettura accessibili da tutti i
thread dell'applicazione.
Figura 4.2: interazione tra memorie e
processori in CUDA
17
L'unica porzione di memoria che può essere acceduta e modificata sia dall'host che dal
device è la global memory. Questa viene utilizzata svariate volte all'interno di un
programma ed è, quindi, necessario minimizzare il bandwidth. Le performance ottimali si
ottengono quando la GPU, nell'esecuzione della funzione kernel, appronta il cosiddetto
coalescing degli accessi alla memoria globale: gli accessi da parte di un thread di un warp
nella memoria globale sono agglomerati dal device nel numero minore possibile di
transazioni, permettendo una esecuzione più efficiente e fluida. Le tecniche ed i requisiti
per gestire il coalescing variano a seconda della compute capability dell'architettura in
uso: per le GPUs precedenti la compute capability 2.0, infatti, le transazioni sono unite per
un numero di thread pari alla metà di un warp anziché pari alla totalità dell'insieme.
4.3 La struttura di un codice CUDA
Il modello CUDA prevede l'utilizzo della CPU, identificata come host, coadiuvato dalla
GPU, identificata come device. Un codice CUDA alterna porzioni di codice sequenziale,
eseguite dall'host, a porzioni di codice parallelo, eseguite dal device. La sequenza di
istruzioni eseguite dalla CPU segue fondamentalmente tre passi:
I. caricamento dei dati nella GPU;
II. chiamata della funzione kernel;
III. recupero dei risultati dell'elaborazione della GPU.
La funzione kernel rappresenta il modo di implementare l'esecuzione parallela di una
porzione di codice da parte introdotto da CUDA: questa, infatti, permette di eseguire una
funzione più volte in parallelo su più thread, al contrario della singola esecuzione a cui fa
riferimento una tradizionale funzione C. La GPU esegue un solo kernel alla volta. Per
operare sui singoli thread o sui singoli blocchi, CUDA mette a disposizione degli
identificatori, la cui natura è approfondita nel paragrafo successivo. Ogni kernel è
suddiviso in grids di blocks, ma è l'hardware a gestire in maniera totalmente autonoma la
distribuzione dei blocchi su ogni multiprocessore. Così facendo, CUDA si conferma come
una piattaforma efficiente, altamente scalare e per lo più trasparente al programmatore per
quanto concerne i passaggi generalmente più delicati di un'applicazione parallela.
18
Figura 4.3: interazione tra host e device in un codice CUDA
4.4 Implementazione di CUDA in C
CUDA C estende il linguaggio ad alto livello C e permette, ovviamente, la gestione di
porzioni di codice destinate alla CPU congiuntamente a porzioni di codice destinate al
coprocessore GPU. L'estensione CUDA C introduce alcuni qualificatori del tipo della
funzione che vanno a completare la firma tradizionale del linguaggio C, quali:
•
__device__: si inserisce se un metodo deve essere eseguito e richiamato dalla GPU;
•
__host__: si inserisce se un metodo deve essere eseguito e richiamato dalla CPU;
•
__global__: si inserisce per identificare un kernel, metodo chiamato dall'host e
demandato alla GPU. Deve avere come tipo di ritorno un parametro void.
Per quanto concerne i tipi e le variabili disponibili, sono stati introdotte diverse novità,
quali:
•
__device__: qualificatore di tipo che definisce una variabile che risiede nella
memoria globale, che ha ciclo di vita pari all'applicazione;
•
__constant__: qualificatore di tipo che definisce una variabile che risiede nella
constant memory, che ha ciclo di vita pari all'applicazione;
19
•
__shared__: qualificatore di tipo che definisce una variabile che risiede nella
memoria condivisa di un blocco di thread;
•
dim3: struttura che identifica una tripla di interi basato su un uint3 (intero senza
segno tridimensionale), il cui valore di default è 1, usato per specificare le
dimensioni di una griglia o un blocco;
•
gridDim: variabile di tipo dim3 che contiene le dimensioni di una griglia;
•
blockIdx: variabile di tipo uint3 che contiene l'identificativo del singolo blocco
all'interno della griglia;
•
blockDim: variabile di tipo dim3 che contiene le dimensioni del blocco;
•
threadIdx: variabile di tipo uint3 che contiene l'identificativo del singolo thread
all'interno del blocco e permette l'accesso alle singole dimensioni tramite i suffissi
.x, .y e .z;
•
warpSize: variabile di tipo int che contiene il numero di thread all'interno del
blocco;
•
cudaError_t: tipo di errore introdotto da CUDA C.
Inoltre CUDA C estende i singoli tipi primitivi del tradizionale C includendo anche tipi
multidimensionali fino a tre dimensioni (e.g., uint3).
La sintassi di invocazione dell'esecuzione di un kernel è totalmente nuova ed è la
seguente:
__global__ void KernelFuncion(int a, int b, int c)
{
…
}
int main()
{
…
// Invocazione di un kernel su un unico blocco
// di N*N*1 threads
int numBlocks = 1;
dim3 threadsPerBlock(N, N);
KernelFunction<<<numBlocks, threadsPerBlock>>>(a, b, c);
…
}
20
Conseguentemente alle modifiche architetturali approntate dalla piattaforma CUDA, l'API
CUDA C include anche nuovi metodi principalmente volti alla gestione della memoria e
alla sincronizzazione, quali:
•
cudaMalloc(void** pointer, size_t nbytes): alloca un oggetto all'interno della
memoria globale. Riceve come parametri di input l'indirizzo del puntatore
all'oggetto allocato e la dimensione dello spazio da allocare;
•
cudaFree(void* pointer): libera lo spazio di memoria precedentemente allocato.
Riceve in ingresso il puntatore all'oggetto da rimuovere;
•
cudaGetErrorString(cudaError_t err): ritorna i dettagli dell'errore passatogli in
ingresso;
•
cudaMemcpy(void* dst, void* src, size_t nbytes, cudaMemcpyKind direction):
gestisce il trasferimento dall'host al device e viceversa. Riceve in ingresso il
puntatore alla destinazione, il puntatore alla sorgente, il numero di bytes da
trasferire e un tipo di trasferimento. Quest'ultimo è solitamente una costante
simbolica
che
può
assumere
un
valore
tra
cudaMemcpyHostToDevice,
cudaMemcpyDeviceToHost oppure cudaMemcpyDeviceToDevice;
•
cudaThreadSynchronize(): blocca l'esecuzione fino al momento in cui il device ha
completato tutti i task richiesti. Se uno dei task fallisce, restituisce un errore;
•
__syncthreads(): utilizzato per coordinare la comunicazione tra thread dello stesso
blocco, funziona come una barriera alla quale tutti i thread all'interno del blocco
devono attendere fintantoché ognuno sia autorizzato a procedere.
4.5 Esempio di codice CUDA C
Il modo migliore per evidenziare le capacità del linguaggio CUDA C è sicuramente
attraverso l'analisi di un esempio di programma che fornisca una panoramica completa ed
intuitiva sulle funzionalità della piattaforma: il seguente codice, ottenuto a partire da
quello riportato come esempio nel paragrafo 3.2.3 della CUDA C Programming Guide di
NVIDIA Corporation, calcola il prodotto tra due matrici A e B, rispettivamente di
dimensioni 80x144 e 144x96, entrambe contenenti numeri interi compresi tra 0 e 5, e ne
21
riporta il risultato in una terza matrice C di dimensioni 80x96. Il listato in CUDA C
implementato di seguito prevede l'utilizzo della memoria condivisa e stampa a video la
durata dell'esecuzione della funzione kernel.
4.5.1 provaCUDA.cu
#include <stdio.h>
#include <stdlib.h>
#include <cuda.h>
// Grandezza del singolo blocco di thread
#define BLOCK_SIZE 16
cudaEvent_t start, stop;
typedef struct {
// Numero di righe e colonne
int width;
int height;
// Passo che coinciderà con il numero di colonne per
// un rapido accesso agli elementi ordinati nell'array
int stride;
// Puntatore all'array contenente gli elementi
int* elements;
} Matrix;
// Ritorna un elemento di una matrice in
// posizione(row, col)
__device__ int GetElement(const Matrix A, int row, int col)
{
return (A.elements[row * A.stride + col]);
}
// Set di un elemento in una matrice in posizione (row, col)
__device__ void SetElement(Matrix A, int row, int col,
int value)
{
A.elements[row * A.stride + col] = value;
}
// Ritorna la sotto-matrice Asub di dimensioni
// BLOCK_SIZExBLOCK_SIZE di A che è posizionata a col
// sotto-matrici di distanza a destra e a row sotto-matrici
// di distanza in basso rispetto al primo elemento in alto
// a sinistra
__device__ Matrix GetSubMatrix(const Matrix A, int row,
int col)
{
Matrix Asub;
22
Asub.width = BLOCK_SIZE;
Asub.height = BLOCK_SIZE;
Asub.stride = A.stride;
Asub.elements = &A.elements[A.stride * BLOCK_SIZE * row
+ BLOCK_SIZE * col];
return Asub;
}
// Implementazione funzione kernel
__global__ void MatMulKernel(const Matrix A, const Matrix B,
Matrix C)
{
// Assegnazione riga e colonna su cui costruire la
// sotto-matrice corrispondente al blocco di thread
int blockRow = blockIdx.y;
int blockCol = blockIdx.x;
// Ogni blocco opera su una sotto-matrice Csub di C
Matrix Csub = GetSubMatrix(C, blockRow, blockCol);
// Ogni thread calcola un elemento di Csub
// salvandolo in Cvalue
int Cvalue = 0;
// Assegnazione riga e colonna corrispondente al thread
int row = threadIdx.y;
int col = threadIdx.x;
// Scorri tutte le sotto-matrici di A e B necessarie per
// calcolare Csub. Moltiplica ogni coppia di
// sotto-matrici e somma il risultato
for (int m = 0; m < (A.width / BLOCK_SIZE); ++m) {
// Estrazione della sotto-matrice Asub of A
Matrix Asub = GetSubMatrix(A, blockRow, m);
// Estrazione della sotto-matrice Bsub of B
Matrix Bsub = GetSubMatrix(B, m, blockCol);
// Assegna spazio in shared memory per Asub e Bsub
__shared__ int As[BLOCK_SIZE][BLOCK_SIZE];
__shared__ int Bs[BLOCK_SIZE][BLOCK_SIZE];
// Carica Asub e Bsub da device a shared memory
// Ogni thread carica un singolo elemento
As[row][col] = GetElement(Asub, row, col);
Bs[row][col] = GetElement(Bsub, row, col);
// Sincronizzazione delle operazioni per essere
// sicuri che le sotto-matrici siano state caricate
// prima delle operazioni
__syncthreads();
// Moltiplica Asub e Bsub
for (int e = 0; e < BLOCK_SIZE; ++e)
Cvalue += As[row][e] * Bs[e][col];
23
// Sincronizzazione necessaria per essere certi che
// le operazioni precedenti siano state completate
// prima di caricare le prossime sotto-matrici
__syncthreads();
}
// Scrivi Csub sulla device memory
// Ogni thread scrive un elemento
SetElement(Csub, row, col, Cvalue);
}
// Le dimensioni delle matrici sono multiple di BLOCK_SIZE
float MatMul(const Matrix A, const Matrix B, Matrix C)
{
// Creazione checkpoint per il calcolo del
// tempo di esecuzione del kernel
cudaEventCreate(&start);
cudaEventCreate(&stop);
// Definizione e caricamento delle matrici A e B
// in device memory
Matrix d_A;
d_A.width = d_A.stride = A.width;
d_A.height = A.height;
size_t size = A.width * A.height * sizeof(int);
cudaMalloc(&d_A.elements, size);
cudaMemcpy(d_A.elements, A.elements, size,
cudaMemcpyHostToDevice);
Matrix d_B;
d_B.width = d_B.stride = B.width;
d_B.height = B.height;
size = B.width * B.height * sizeof(int);
cudaMalloc(&d_B.elements, size);
cudaMemcpy(d_B.elements, B.elements, size,
cudaMemcpyHostToDevice);
// Definizione e allocazione della matrice C in device
// memory
Matrix d_C;
d_C.width = d_C.stride = C.width;
d_C.height = C.height;
size = C.width * C.height * sizeof(int);
cudaMalloc(&d_C.elements, size);
// Invocazione funzione kernel
dim3 dimBlock(BLOCK_SIZE, BLOCK_SIZE);
dim3 dimGrid((B.width / dimBlock.x),
(A.height / dimBlock.y));
cudaEventRecord(start, 0);
MatMulKernel<<<dimGrid, dimBlock>>>(d_A, d_B, d_C);
24
cudaThreadSynchronize();
cudaEventRecord(stop, 0);
cudaEventSynchronize(stop);
// Lettura della matrice C dalla device memory
cudaMemcpy(C.elements, d_C.elements, size,
cudaMemcpyDeviceToHost);
// De-allocazione della device memory
cudaFree(d_A.elements);
cudaFree(d_B.elements);
cudaFree(d_C.elements);
float el_time = 0.0;
cudaEventElapsedTime(&el_time, start, stop);
cudaEventDestroy(start);
cudaEventDestroy(stop);
return el_time;
}
int main(int argc, char* argv[]){
Matrix A, B, C;
int a1, a2, b1, b2;
float duration;
srand(time(NULL));
//
a1
//
a2
//
b1
//
b2
Numero
= 80;
Numero
= 144;
Numero
= a2;
Numero
= 96;
di righe di A
di colonne di A
di righe di B
di colonne di B
A.height = a1;
A.width = a2;
// Alloca spazio necessario nella memoria dell'host
A.elements = (int*)malloc(A.width * A.height
* sizeof(int));
B.height = b1;
B.width = b2;
// Alloca spazio necessario nella memoria dell'host
B.elements = (int*)malloc(B.width * B.height
* sizeof(int));
C.height = A.height;
C.width = B.width;
// Alloca spazio necessario nella memoria dell'host
25
C.elements = (int*)malloc(C.width * C.height
* sizeof(int));
// Riempimento matrici A e B
for(int i = 0; i < A.height; i++)
for(int j = 0; j < A.width; j++)
A.elements[i * A.width + j] = rand() %6);
for(int i = 0; i < B.height; i++)
for(int j = 0; j < B.width; j++)
B.elements[i * B.width + j] = rand() %6;
// Lancio funzione di prodotto
duration = MatMul(A, B, C);
// Stampa a video le matrici
for(int i = 0; i < A.height; i++){
for(int j = 0; j < A.width; j++)
printf("%f ", A.elements[i * A.width + j]);
printf("\n");
}
printf("\n");
for(int i = 0; i < B.height; i++){
for(int j = 0; j < B.width; j++)
printf("%f ", B.elements[i * B.width + j]);
printf("\n");
}
printf("\n");
for(int i = 0; i < C.height; i++){
for(int j = 0; j < C.width; j++)
printf("%f ", C.elements[i * C.width + j]);
printf("\n");
}
printf("\n");
printf("\nDurata calcolo: %f millisecondi", duration);
return 0;
}
4.5.2 Analisi del codice
Come detto all'inizio del paragrafo, il codice precedentemente riportato calcola il prodotto
di due matrici A e B, salvandone il risultato su una terza matrice C. Le matrici trattate sono
variabili il cui tipo Matrix è definito all'interno del codice stesso come una struttura dati
contenente le seguenti variabili:
26
•
width, un intero che rappresenta il numero di colonne della matrice;
•
height, un intero che rappresenta il numero di righe della matrice;
•
stride, un intero che rappresenta il passo con cui scorrere l'array in cui sono salvati
gli elementi della matrice stessa per minimizzare il bandwidth;
•
elements, un puntatore agli elementi contenuti nella matrice che sono salvati in un
array monodimensionale e disposti per numero di riga crescente.
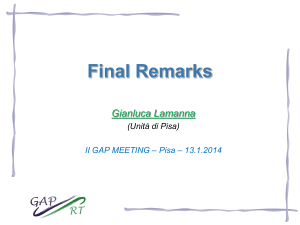
Il filo conduttore di questo modello di programmazione parallela in CUDA C è quello di
implementare il prodotto matriciale delegando il calcolo di ogni elemento di una sottomatrice quadrata Csub della matrice C ad un singolo thread di un blocco. C sub è ottenuta dal
prodotto di due matrici rettangolari: una sotto-matrice di A di dimensioni (A.width,
BLOCK_SIZE), che ha lo stesso numero di righe di C sub, e una sotto-matrice di B di
dimensioni (BLOCK_SIZE, B.height), che ha lo stesso numero di colonne di Csub. Per
adattarsi alle dimensioni del blocco di thread del device, le due sotto-matrici vengono
suddivise in tante matrici quadrate di dimensione BLOCK_SIZE quante necessario
affinché non ci siano elementi in comune tra loro e Csub viene calcolata come la somma dei
prodotti delle matrici quadrate costruite. Ognuno di questi prodotti è ottenuto caricando le
matrici quadrate utilizzate dalla memoria globale a quella condivisa, utilizzando ogni
thread per calcolare un singolo elemento della matrice prodotto. Ciascun thread somma il
proprio risultato a quello degli altri e lo salva in una variabile di appoggio comune
(Cvalue) che contiene l'elemento da calcolare. Al termine dell'esecuzione di tutti i thread,
il risultato definitivo viene scritto in memoria globale nella posizione che rappresenta
all'interno della matrice Csub.
Il codice è ottimizzato per l'utilizzo della memoria condivisa da parte di host e device, al
fine di non dover accedere in memoria un numero eccessivo di volte rispetto a quante sono
realmente necessarie. Idealmente, il contesto migliore su cui operare sarebbe quello di
accedere una sola volta in memoria, avendo precedentemente caricato entrambe le intere
matrici A e B necessarie per il calcolo. Se, però, operassimo su matrici di dimensioni
cospicue, questo metodo comporterebbe un calo di efficienza nell'uso della shared
memory dato che quest'ultima è di grandezza limitata e potrebbe non riuscire ad ospitare la
27
totalità dei dati. Il codice mostrato precedentemente implementa una modalità di
sfruttamento di questa risorsa che rappresenta un giusto compromesso tra praticità d'uso e
gestione dello spazio disponibile: attraverso la suddivisione in blocchi, infatti, si sfrutta la
velocità di accesso alla memoria condivisa e si ottimizza l'uso della memoria globale, dal
momento che la matrice A viene letta esclusivamente (B.width / BLOCK_SIZE) volte e la
matrice B solo (A.height / BLOCK_SIZE) volte.
L'utilizzo della shared memory permette di minimizzare il bandwidth, sfruttando anche la
tecnica di coalescing della memoria globale attraverso un accesso regolato dalla variabile
membro stride della struttura dati Matrix. L'applicazione di questa tecnica per il
trasferimento di più dati dalla memoria globale nel numero minimo di transazioni permette
di sfruttare una memoria, quale è quella condivisa, con un bandwidth molto alto, una
latenza molto bassa e che non soffre la gestione di vettori multidimensionali. Gli elementi
delle sotto-matrici, infatti, sono prelevati dalla memoria globale, nella quale risiedono
come array monodimensionali ordinati per righe, e immagazzinati nella shared memory,
dove tutti i thread in esecuzione possono estrapolarne i dati necessari alle proprie
operazioni con trasferimenti nettamente più veloci.
Figura 4.4: prodotto matriciale con memoria condivisa
28
4.5.3 Esecuzione su Nsight
Non resta che implementare il listato precedentemente riportato all'interno di Nsight,
l'ambiente di programmazione incluso nel CUDA Toolkit che permette di interagire con la
piattaforma CUDA. Per l'esecuzione di questo codice si è sfruttata una scheda video
NVIDIA GeForce GT 330M, dotata di architettura Tesla 2.0, con compute capability 1.2
montata su una macchina fornita di sistema operativo Linux Ubuntu 14.04 LTS a 64 bit.
Per interagire con la GPU è stato scaricato ed installato il CUDA Toolkit versione 6.5,
release massima per l'architettura a disposizione, che include il compilatore nvcc release
5.5 e l'estensione Nsight per l'ambiente di sviluppo Eclipse.
L'output ottenuto ha evidenziato che l'esecuzione della sola porzione di codice che include
la funzione kernel, la quale rappresenta il fulcro del calcolo parallelo adottato
nell'esempio, ha impiegato circa 6 millisecondi.
Figura 4.5: output dell'esecuzione di provaCUDA.cu
4.5.4 Profiling
CUDA mette a disposizione il software NVIDIA Visual Profiler (nvvp) che fornisce gli
strumenti di profiling per visualizzare ed analizzare le performance dell'applicazione,
senza distinzione riguardo il linguaggio di programmazione adottato. È possibile utilizzare
anche un applicativo, incluso sempre nel toolkit, per l'analisi direttamente da terminale
29
(nvprof), previo precedente spostamento all'interno della directory contenente il binario
dell'applicazione da analizzare. Sebbene l'esempio riportato sia abbastanza basilare e
presenti una sola funzione kernel che comporta un utilizzo della GPU per meno del 20%
del tempo complessivo di esecuzione del programma, è possibile notare alcune
ottimizzazioni nel codice evidenti dai dati estrapolati attraverso il profiler.
Lanciando l'applicazione da terminale attraverso la riga di comando nvprof ./myApp
si può ottenere un breve riepilogo delle funzioni kernel e delle operazioni sulla memoria
del device.
Figura 4.6: nvprof ./provaCUDA
Una vista più dettagliata sull'esecuzione del kernel e sulle operazioni in memoria possono
essere reperite lanciando la riga di comando
nvprof
--print-gpu-trace
./myApp.
Figura 4.7: nvprof --print-gpu-trace ./provaCUDA
I dati più interessanti e significativi nella fase di profiling dell'applicazione sono
sicuramente gli events e le metrics. Un event è un'attività, un'azione o un'occorrenza
numerabile sul device che corrisponde ad un singolo valore accumulato durante
l'esecuzione del kernel. Una metric è una caratteristica dell'applicazione che è calcolata a
partire da uno o più valori di events del kernel. Per tracciare events e metrics relative ad
una determinata applicazione possiamo lanciare da terminare i comandi
--events all ./myApp e nvprof --metrics all ./myApp.
30
nvprof
Figura 4.8: nvprof --events all ./provaCUDA
Gli events più significativi sono quelli legati alle operazioni di lettura/scrittura in memoria
globale. Dalla figura sovrastante è desumibile, attraverso l'osservazione dei valori relativi
al gld_incoherent e gst_incoherent che stabiliscono il numero di operazioni
rispettivamente di load e store in global memory e che risultano in questo caso nulli, che il
kernel implementato nell'applicazione di esempio assicura il coalescing della totalità delle
operazioni in memoria. Questo è sicuramente un vantaggio ed un dato indicativo della
bontà del codice parallelo implementato, permettendo di ottimizzare l'uso delle risorse che
la GPU offre.
Figura 4.9: nvprof --metrics all ./provaCUDA
Per quanto riguarda le metrics ottenute dall'esecuzione del kernel, si può definire più che
soddisfacente il throughput raggiunto per le operazioni in memoria in relazione al device a
disposizione. Notevole è sicuramente la percentuale di
raggiunta: tutti i salti all'interno del codice sono non divergenti.
31
branch_efficiency
4.5.5 Confronto con codice sequenziale di funzionalità equivalente
Ma quanto è remunerativa l'applicazione di un modello di programmazione parallelo
rispetto al tradizionale modello sequenziale? Ovviamente non può essere data una risposta
di carattere generale, poiché i vantaggi dell'esecuzione parallela rispetto a quella
sequenziale non sono assoluti. È possibile, per esempio, valutare se la scelta di far
intervenire la GPU nell'esecuzione del programma riportato nel paragrafo precedente,
assegnandole mansioni di calcolo parallelo, sia stata una scelta efficiente. L'indice più
attendibile e sicuramente immediatamente più indicativo è quello relativo al tempo di
esecuzione del programma: se, eseguendo il codice parallelo e quello sequenziale in
successione, si ottiene un tempo di esecuzione minore per l'implementazione con CUDA,
allora si può certamente identificare la scelta del modello parallelo come la più corretta per
tale applicazione, almeno dal punto di vista temporale.
Un esempio di codice sequenziale in C da me appositamente implementato per effettuare il
confronto può essere il seguente (matrixMul.c):
#include <stdio.h>
#include <stdlib.h>
#include <time.h>
int main()
{
srand(time(NULL));
int a1, a2, b1, b2;
int** A;
int** B;
int** C;
int i, j, k;
float TempoInMillisecondi;
double TempoInSecondi;
clock_t c_start, c_end;
//
a1
//
a2
//
b1
//
b2
Numero
= 80;
Numero
= 144;
Numero
= a2;
Numero
= 96;
di righe di A
di colonne di A
di righe di B
di colonne di B
// Alloca spazio necessario nella memoria
A = (int**)malloc(a1 * sizeof(int*));
32
for(i = 0; i < a1; i++)
A[i] = (int*)malloc(a2 * sizeof(int));
B = (int**)malloc(b1 * sizeof(int*));
for(i = 0; i < b1; i++)
B[i] = (int*)malloc(b2 * sizeof(int));
C = (int**)malloc(a1 * sizeof(int*));
for(i = 0; i < a1; i++)
C[i] = (int*)malloc(b2 * sizeof(int));
// Riempimento matrici A e B
for(i = 0; i < a1; i++)
for(j = 0; j < a2; j++)
A[i][j] = rand() %6;
for(i = 0; i < b1; i++)
for(j = 0; j < b2; j++)
B[i][j] = rand() %6;
c_start = clock();
// Calcolo prodotto matriciale
for(i = 0; i < a1; i++){
for(j = 0; j < b2; j++){
C[i][j] = 0;
for(k = 0; k < a2; k++){
C[i][j] += A[i][k] * B[k][j];
}
}
}
c_end = clock();
// Stampa a video le matrici
for(i = 0; i < a1; i++){
for(j = 0; j < a2; j++)
printf("%d ", A[i][j]);
printf("\n");
}
printf("\n");
for(i = 0; i < b1; i++){
for(j = 0; j < b2; j++)
printf("%d ", B[i][j]);
printf("\n");
}
printf("\n");
for(i = 0; i < a1; i++){
for(j = 0; j < b2; j++)
printf("%d ", C[i][j]);
33
printf("\n");
}
printf("\n");
TempoInSecondi = (c_end - c_start) / (double)
CLOCKS_PER_SEC;
TempoInMillisecondi = TempoInSecondi * 1000;
printf("\nDurata calcolo: %f millisecondi\n",
TempoInMillisecondi);
// De-allocazione delle matrici
for(i = 0; i < a1; i++)
free(C[i]);
free(C);
for(i = 0; i < b1; i++)
free(B[i]);
free(B);
for(i = 0; i < a1; i++)
free(A[i]);
free(A);
return 0;
}
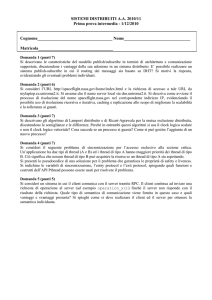
Dall'output riportato nella figura sottostante è facile verificare che il tempo di esecuzione
della porzione di codice sequenziale relativa al solo calcolo del prodotto matriciale ha
impiegato circa 16 millisecondi di tempo, ossia più del doppio del tempo di esecuzione
relativo alla stessa funzionalità implementata attraverso il modello parallelo precedente.
Figura 4.10: output dell'esecuzione di matrixMul.c in Nsight
34
Conclusioni
Così come la programmazione orientata agli oggetti ha fatto con il metodo non strutturale
in voga fino agli anni '80, si può senza dubbio affermare che la programmazione parallela
sta rivoluzionando il modo di concepire e pensare le applicazioni. Questo processo
innovativo, a mio avviso, è di portata maggiore rispetto alle novità annunciate come
rivoluzionarie per il settore informatico negli anni passati, dato che la programmazione
parallela apre ad innumerevoli nuove opportunità di ricerca nei più svariati ambiti di
interesse, non esclusivamente scientifici. Il GPU-Computing, in particolare, è il fulcro di
svariati progetti che hanno segnato un deciso progresso nei rispettivi settori: dal progetto
COSMO che studia e prevede i cambiamenti climatici globali al progetto AMBER14 che
simula i movimenti molecolari delle biomolecole, dall'applicazione Smilart Platform che
riconosce in tempo reale i volti delle persone in qualsiasi scenario a quella PowerGrid che
applica la trasformata discreta di Fourier nell'ambito del medical imaging. Inoltre, se
all'inizio l'approccio parallelo veniva accantonato nei programmi a causa della gestione
troppo elaborata e dettagliata degli strumenti necessari a renderlo efficiente, ora sta
prendendo sempre più piede tra gli addetti ai lavori grazie ai notevoli sviluppi
architetturali dei processori, di cui si è trattato approfonditamente nel presente elaborato.
In questo senso, la piattaforma CUDA rappresenta il primo esempio di applicazione del
modello parallelo a tutti gli aspetti della computazione, dall'architettura del processore
all'esecuzione del codice, senza impegnare il programmatore con complesse operazioni di
sincronizzazione o di gestione della memoria.
La parte nevralgica e, dal mio punto di vista, più interessante e coinvolgente di questo
lavoro di tesi è stata quella di analizzare in prima persona le grandi potenzialità di
applicazione di CUDA, permettendomi di allargare le mie conoscenze grazie ad una prima
completa esperienza di programmazione parallela. Partendo da un codice di esempio della
CUDA C Programming Guide, ho sviluppato ed analizzato un'intera applicazione che
racchiudesse tutte le caratteristiche per cui la piattaforma CUDA è considerata altamente
35
innovativa. I vantaggi dell'esecuzione parallela si sono rivelati palesemente evidenti nel
confronto con il rispettivo modello sequenziale riportato nell'ultimo capitolo di questo
elaborato. L'esecuzione del primo codice, infatti, ha richiesto meno della metà del tempo
di esecuzione delle stesse funzionalità eseguite in maniera sequenziale dal secondo codice.
Inoltre, bisogna ricordare che i benefici della programmazione parallela, sia in termini di
tempo di esecuzione che di sfruttamento delle risorse messe a disposizione
dall'architettura, sono tanto maggiori quanto è più grande la mole di dati indipendenti da
trattare.
Alla luce della trattazione complessiva emersa da questa tesi, la piattaforma CUDA e i
modelli di programmazione per il calcolo parallelo in generale possono essere considerati,
a ragion veduta, il presente ed il futuro della tecnologia applicata ai sistemi informatici di
tutto il mondo, dato che il progresso tecnologico richiede sempre maggiore capacità
computazionale in tempo reale e sempre maggiore velocità di esecuzione in tutti gli ambiti
di applicazione.
36
Sviluppi Futuri
Nonostante le tante innovazioni già operative ed analizzate all'interno di questo elaborato,
i modelli di programmazione per il calcolo parallelo sono destinati a svilupparsi e a
sviluppare il settore informatico in maniera ancora più decisa e rivoluzionaria già nel
prossimo futuro. In particolare, la NVIDIA Corporation sta introducendo nuove migliorie
alla propria piattaforma CUDA con il lancio di nuove generazioni di supporti video. Dopo
la Tesla, infatti, l'ultima novità architetturale dell'azienda statunitense, che porta il nome
del fisico italiano Fermi, presenta migliorie sotto l'aspetto delle operazioni in virgola
mobile a doppia precisione, del supporto ECC, della shared memory e della velocità dei
context switch e delle operazioni atomiche. Tutto questo grazie a 512 CUDA core divisi in
16 SM, porzioni di memorie condivise configurabili, un livello di cache aggiuntivo e un
doppio warp scheduler. Il supporto Error Correcting Code (ECC) assicura, inoltre,
l'integrità dei dati in memoria, e risulta utile soprattutto durante le esecuzioni di sistemi
che trattano dati sensibili, come in ambito medico. La tecnologia ECC rileva e corregge
errori su singoli bit dovuti a naturali radiazioni accidentali prima che danneggino il
sistema e procurino errori indesiderati e indelebili.
La sempre maggiore affidabilità ed efficienza dei sistemi paralleli consente di segnalare
questi modelli come i più avveniristici ed interessanti per il futuro del settore informatico.
Figura 19: evoluzione dell'architettura di una GPU dal 2006 ad oggi
37
Bibliografia
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
M. Danelutto, Programmazione parallela: evoluzione e nuove sfide, Mondo Digitale, Aprile
2015
NVIDIA Corporation, CUDA C Programming Guide, PG-02829-001_v7.5, Settembre 2015
T. G. Mattson, B. A. Sanders, B. L. Massingill, Patterns for parallel programming, Addison
Wesley, 2013
NVIDIA Corporation, http://www.nvidia.it/object/gpu-computing-it.html, 7/6/2016
NVIDIA Corporation, http://www.nvidia.it/content/EMEAI/images/tesla/tesla-servergpus/nvidia-gpu-application-catalog-eu.pdf, 10/6/2016
NVIDIA Corporation,
http://www.nvidia.it/content/PDF/fermi_white_papers/NVIDIA_Fermi_Compute_Architecture_
Whitepaper.pdf, 10/6/2016
NVIDIA Corporation, http://www.nvidia.it/object/cuda-parallel-computing-it.html, 9/6/2016
NVIDIA Corporation, https://devblogs.nvidia.com/parallelforall/how-access-global-memoryefficiently-cuda-c-kernels/, 13/6/2016
NVIDIA GeForce GT330M, http://www.geforce.com/hardware/notebook-gpus/geforce-gt330m/specifications, 13/6/2016
NVIDIA CUDA Toolkit 6.5,
http://developer.download.nvidia.com/compute/cuda/6_5/rel/docs/CUDA_Toolkit_Release_Not
es.pdf, 13/6/2016
CUDA Pro Tip: nvprof is Your Handy Universal GPU Profiler,
https://devblogs.nvidia.com/parallelforall/cuda-pro-tip-nvprof-your-handy-universal-gpuprofiler/, 18/7/2016