IL SISTEMA FIACCOLA:
LA PROGETTAZIONE DI DETTAGLIO
Ing. Roberto Marelli – B&C Engineering and Construction srl
1. Sommario
I sistemi di fiaccola o torcia, al servizio di raffinerie, impianti LNG ed impianti chimici
rappresentano “l’estremità” dell’impianto, la parte meno nobile, tuttavia vitale per il
funzionamento.
La loro struttura di sostegno può essere di vario tipo, dimensione ed altezza; ultimamente a
causa delle grandi portate di scarico e delle limitazioni sempre più restringenti del livello di
radiazione a terra, le altezze delle torce sono aumentate raggiungendo ormai in più di un
caso i 200m.
Al tempo stesso le normative sempre più severe in fatto di vento e terremoto portano alla
realizzazione di strutture sempre più performanti e di dimensioni ragguardevoli.
Ecco che allora la metodologia di calcolo e la necessità di ridurre il peso delle strutture, per
far fronte ad un sempre più elevato costo di materiali e manodopera, diventano fattori
essenziali dell’attività del progettista.
La necessità di realizzare strutture che possano essere facilmente assemblate in cantiere, in
tempi ridotti e possibilmente senza errori di fabbricazione, consiglia l’utilizzo di strumenti
di disegno automatico tridimensionale che consentono di modellare non solo la struttura ma
anche tutte le parti di processo (risers, tubi di servizio, linee di vapore, ecc).
Sempre più spesso infatti al progettista viene richiesto il modello tridimensionale che viene
poi inserito nel modello completo dell’impianto, per le verifiche del caso.
Lo studio della struttura sin dalle sue prime fasi, con una particolare attenzione alla sua
realizzazione in cantiere, consente di ridurre drasticamente i tempi di montaggio ed i costi.
2. Introduzione
Il calcolo di processo determina l’altezza e il diametro della fiaccola. La tipologia del
sistema “flare” viene determinata in base a vari fattori tra i quali ricordiamo:
¾ Le condizioni di progetto, in particolare le temperature di progetto e/o di esercizio;
¾ Lo spazio a disposizione per la realizzazione della struttura portante;
¾ La necessità di poter eseguire la manutenzione in “operating”, nel caso di torce a
più risers;
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 1
Marzo 2011
¾ I costi di costruzione, montaggio e di manutenzione,
¾ I tempi di realizzazione, a partire dal progetto alla costruzione in cantiere.
Per far fronte a tutte o in parte a queste necessità, il sistema fiaccola può essere così
suddiviso in varie tipologie:
¾
¾
¾
¾
¾
Autoportante ( o “Self supporting”)
Strallato ( o “Guyed”)
Con struttura portante a derrick strallato e risers fissi (o Guyed derrick)
Con struttura portante a derrick e risers fissi o (“Derrick”)
Con struttura portante a derrick e risers smontabili (o “Derrick – Demountable”)
Ciascuna di queste tipologie risponde ad esigenze particolari che possono essere:
¾
¾
¾
¾
¾
Economicità e velocità di montaggio;
Velocità di realizzazione in officina;
Raggiungibilità di altezze considerevoli a costi ridotti;
Necessità di spazi ridotti al site;
Possibilità di eseguire manutenzioni su una flare, tipicamente la sostituzione del
terminale, senza la necessità del blocco (“shut down”) di tutti gli impianti che
convergono al sistema di torcia; tipico questo di sistemi multi-flare
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 2
Marzo 2011
3. Tipologia delle torce
3.1 Torcia Autoportante
La soluzione autoportante è utilizzabile per altezze fino a 50-60m e con risers di diametro
significativo, dal momento che in questo caso essi costituiscono anche la struttura portante
in grado di sopportare non solo il peso proprio ma anche l’azione del vento e del terremoto.
Altezze più elevate comportano spessori considerevoli che possono rendere antieconomica
questo tipo di soluzione, soprattutto quando si utilizzano materiali nobili come l’acciaio
inossidabile, che notoriamente resiste alla corrosione ma ha caratteristiche di resistenza
inferiori a quelle dell’acciaio al carbonio, soprattutto alle alte temperature.
Infatti ciò che normalmente sconsiglia l’utilizzo di tale soluzione, è la temperatura di
progetto e/o di esercizio.
Poiché la resistenza del materiale (snervamento o “yielding stress”) è inversamente
proporzionale alla temperatura, più è alta quest’ultima, più risulta ridotto lo snervamento
del materiale e quindi la resistenza all’imbozzamento.
A favore della soluzione autoportante vi sono:
- la sua economicità;
- la velocità di costruzione;
- la facilità di montaggio;
- il poco spazio richiesto al site per il suo posizionamento;
Le torce autoportanti sono generalmente dotate di scale alla marinara e di una piattaforma
di testa a 360°, per permettere l’accessibilità al terminale. Piattaforme secondarie o “rest
platfoms” sono previste lungo tutto il risers al fine di permettere la sosta durante la salita.
Solitamente non si accettano scale alla marinara più lunghe di 9m anche se ultimamente si
tende a limitare questa misura a non più di 6m.
Di solito sono munite di luci aeree, il cui numero di livelli e luci per livello, vengono
determinate dalle norme del singolo paese dove vengono realizzate (Le più utilizzate sono
le Americane ICAO)
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 3
Marzo 2011
3.2 Torcia Strallata
La soluzione strallata è utilizzabile per altezze fino a 150-160m ed anche in questo caso il
riser costituisce la struttura portante.
Nella torcia strallata le funi ricoprono il compito particolare di assorbire i carichi
orizzontali e di trasferirli a terra mediante le forze di trazione che in esse si generano.
Di norma si utilizzano funi “antigirevoli” composte da più fili metallici intrecciati tra di
loro; esistono funi a 61, 91, 127 fili per ciascuna delle quali viene definito un “ultimate
breaking load” o carico ultimo di rottura, che deve essere pari a tre volte la massima
trazione realmente presente nella fune in condizione di esercizio.
Le funi sono collegate:
a) al riser mediante apposite orecchie di ancoraggio
b) ai corpi morti a terra, mediante apposite barre filettate sulle quali si agisce in fase di
montaggio per regolarne la tensione iniziale o “pretensione”.
Solitamente le funi sono pretese in officina al fine di eliminare l’effetto “cordatura” che
provocherebbe, alla prima tensione della fune, un allungamento indesiderato con
conseguente perdita della pretensione.
La pretensione iniziale o di montaggio, ha un compito essenziale nella limitazione degli
spostamenti quando il riser funziona a basse temperature. Infatti in questa condizione, il
riser si contrae, gli stralli si rilasciano o come si dice “vanno in bando” e non sono più in
grado di contrastare gli spostamenti laterali del riser,
a meno che non siano
opportunamente pretensionati in fase di montaggio. Normalmente la pretensione di
montaggio può essere calcolata nel 10-15% del carico di rottura della fune.
Al variare dell’altezza del riser, ci possono essere vari ordini di stralli, tipicamente disposti
a 120° l’uno dall’altro.
Il sistema riser+stralli è alquanto complesso da studiare in quanto il grado di vincolo fornito
dalle funi è paragonabile ad una molla elastica la cui rigidezza è in continuo cambiamento
conseguentemente ai carichi orizzontali (e quindi agli spostamenti) applicati dall’esterno.
Qualora non si abbia a disposizione un programma di calcolo che preveda l’ “elemento
fune”, di norma si arriva ad una soluzione per iterazione.
L’utilizzo della soluzione strallata è dunque agevole quando la massima temperatura di
funzionamento della torcia non supera i 200°C.
Una temperatura dello stack molto elevata provoca il suo allungamento per effetto della
dilatazione termica con conseguente innalzamento delle tensioni nelle funi, oltre il limite di
sicurezza.
Per temperature molto elevate inoltre, il riser risulta soggetto a grossi carichi di
compressione dovuti alla componente verticale delle tensioni presenti nelle funi; tali carichi
danno origine a problemi di instabilità e di imbozzamento.
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 5
Marzo 2011
R
tra il raggio R del riser,
tc
e della temperatura, più quest’ultima è alta e minore è la
Poiché la resistenza all’imbozzamento è funzione del rapporto
il suo spessore corroso tc
resistenza del materiale.
Le torce strallate possono essere a riser singolo o multiplo, con elementi meccanici di guida
dei risers a diversa temperatura.
A favore della soluzione strallata vi sono:
- la sua economicità;
- la velocità di costruzione;
- la relativa facilità di montaggio;
A sfavore della soluzione strallata vi sono:
- i grandi spazi a terra richiesti per l’ancoraggio delle funi; l’angolazione di queste ultime è
infatti normalmente compresa tra i 40° e 60°. Ciò significa che uno strallo collegato al
riser a 140m d’altezza può richiedere 70-80m a terra, il che può portare i corpi morti a
disporsi su di una circonferenza di raggio 140-160m.
- la manutenzione delle funi che consiste nel controllo periodico della loro pretensione.
Anche la torcia strallata è dotata di scale alla marinara e piattaforma di testa a 360° per la
accessibilità al terminale.
Ulteriori piattaforme possono essere previste in prossimità degli attacchi delle funi al riser,
per permetterne la manutenzione.
Anche in questo caso sono previste piattaforme di riposo lungo tutta l’altezza dello stack.
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 6
Marzo 2011
3.3 Torcia derrick strallata
La soluzione con il derrick strallato è una via di mezzo tra la soluzione derrick e quella
strallata pura. In questo caso un traliccio di dimensioni ridotte, solitamente a sezione
costante, può supportare uno o più risers con temperature di funzionamento anche
profondamente diverse tra di loro. Il derrick ed il sistema di funi hanno il compito di
assorbire le azioni orizzontali dovute al vento o al terremoto mentre i risers possono
scorrere lungo le guide in relazione alle temperature di esercizio. Questa soluzione presenta
tutti i lati positivi della soluzione a traliccio:
- grandi altezze raggiungibili;
- possibilità di alloggiare più risers;
- diversità di temperature di esercizio per i risers;
- economicità della soluzione
ma al tempo stesso presenta alcune delle problematiche della soluzione strallata pura:
- necessità di grandi spazi a terra per l’ancoraggio delle funi
- necessità di manutenzioni periodiche agli stralli.
Le passerelle e le scale alla marinara per l’accesso al terminale possono essere alloggiate
all’interno od all’esterno del traliccio.
Di solito si prevedono piattaforme tutt’attorno al traliccio per l’alloggiamento del sistema di
luci aeree e per la manutenzione del/dei terminali.
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 8
Marzo 2011
3.4 Torcia derrick a riser fissi
La soluzione a derrick con risers fissi, si utilizza quando si hanno più risers e le soluzioni
autoportante, strallata o derrick strallata risultano impraticabili per mancanza di spazio a
terra o perché i risers hanno diametri troppo piccoli per essere strallati, o perché hanno
dimensioni troppo grandi per essere alloggiati su un traliccio strallato di piccole
dimensioni.
Poiché questa soluzione prevede solitamente la costruzione ed il montaggio di un traliccio
di dimensioni ragguardevoli, risulta essere tra le meno economiche.
La soluzione a derrick non ha limitazioni di altezza e consente ai risers di muoversi
autonomamente in relazione alle temperature di funzionamento. Di pianta triangolare,
quadrata, rettangolare o a farfalla, può avere la conformazione a tronco di piramide con
facce inclinate e risers interni o a faccia piana con risers esterni al traliccio.
¾ La soluzione a facce inclinate e riser interno di solito si utilizza quando si ha un solo
riser, specialmente di grosso diametro. In fase di montaggio è più laboriosa perché
costringe a montare la struttura ed il riser contemporaneamente, poiché non è possibile
infilare il riser dall’altro, nella struttura completata;
¾ La soluzione a faccia piana è quella che consente un montaggio più facile dei risers
che in questo caso risultano esterni alla struttura e i cui tronchi possono essere uniti a
terra mediante flange o saldature e quindi ribaltati, limitando i tempi di montaggio in
cantiere;
¾ La soluzione a sezione triangolare, sia a faccia piana che a tronco di piramide, è ottima
per strutture con altezze fino a 100m circa di altezza e per carichi di vento non
particolarmente severi: in condizione estreme infatti, la soluzione triangolare presenta
l’inconveniente di avere un solo montante resistente a compressione, per vento che
spira perpendicolarmente alla faccia piana.
¾ La soluzione a sezione quadrata o rettangolare, sia a faccia piana che a tronco di
piramide, non ha limitazione di altezza, né di dimensioni.
¾ La soluzione a farfalla infine consente l’alloggiamento di un gran numero di risers, dal
momento che potenzialmente presenta quattro facce piane.
I derricks sono dotati di scale alla marinara e piattaforma di testa per l’accessibilità al/ai
terminale/i. Apposite piattaforme intermedie possono essere posizionate sia per l’impianto
di segnalazione aerea, sia per facilitare le operazioni di connessione delle sezioni dei risers.
La sostituzione del/i terminale/i può essere eseguita mediante la gru o l’utilizzo
dell’apposito davit alloggiato in sommità del traliccio e di solito protetto dalle radiazioni
del/i terminale/i, mediante uno schermo antiradiazione (“radiation shiled”).
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 10
Marzo 2011
Per altezze non rilevanti, il derrick può essere costituito da profili ad H, L e C o composti.
Quando le altezze diventano importanti, la soluzione tubolare risulta la migliore, poiché a
parità di peso l’inerzia del profilo tubolare è superiore a quella dei profili e soprattutto,
risulta essere uguale in tutte le direzioni.
La soluzione tubolare garantisce inoltre una migliore resistenza alla corrosione, rispetto alla
soluzione a profili.
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 11
Marzo 2011
3.5 Torcia derrick a riser smontabili
La soluzione a derrick con risers smontabili è in assoluto la più complessa dal punto di
vista realizzativo e la più dispendiosa dal punto di vista economico ma consente di
alloggiare risers completamente smontabili, indipendentemente l’uno dall’altro. Ciò
significa che ciascuna fiaccola può essere abbassata completamente a terra qualora sia
necessaria la manutenzione/sostituzione del terminale o del riser stesso. Tutte le linee di
servizio (piloti, iniezione, vapore) e quelle elettriche (termocoppie) sono posizionate sul
singolo riser e vengono sollevate/abbassate insieme ad esso.
Le torce possono essere assistite a vapore o ad aria; la soluzione smontabile non presenta
particolari problematiche in entrambi i casi.
Nel primo caso i tubi del vapore che solitamente possono variare da uno a tre, sono fissati
direttamente a ciascuna sezione del riser e sono flangiati alle estremità al fine di consentirne
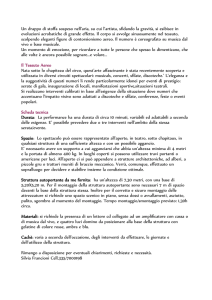
il collegamento con la sezione successiva. “Loops” o dilatatori assiali (“expansion
bellows”) sono previsti sui tubi del vapore lungo ogni sezione del riser, al fine di assorbire
le differenti elongazioni .
Esempio di loops su linee del vapore
Expansion bellow
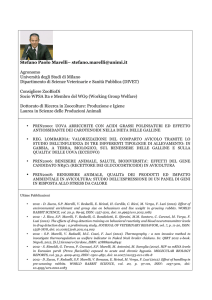
Nel secondo caso il tubo dell’aria è concentrico a quello del gas ed è solitamente quello
esterno. Entrambi i tubi sono flangiati alle estremità per consentirne il collegamento con la
sezione successiva.
Il riser interno del gas è guidato dal risers esterno dell’aria. La differenza di elongazione
termica tra il tubo caldo o freddo del gas e quello solitamente freddo dell’aria, è assorbita
da un compensatore o soffietto posto tra la flangia del tip e quella del tubo dell’aria.
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 13
Marzo 2011
Riser a doppia canna per torce assistite ad aria
Il derrick può avere sezioni diverse: triangolare, quadrata, rettangolare, a farfalla o a doppia
sezione a secondo del numero dei risers, delle loro dimensioni, della loro altezza e del loro
peso.
Il sistema di sollevamento/abbassamento dei riser è costituito da:
a) un sistema a terra di due o tre argani idraulici (uno di ribaltamento ed uno di
sollevamento oppure uno di ribaltamento e due di sollevamento) a seconda che si
abbiano uno o due golfari di sollevamento per ogni sezione di riser. Solitamente la
soluzione col golfare unico viene adottata per tralicci a faccia piana, con risers
esterni, sufficientemente vicini alla faccia del derrick stesso e con peso proprio non
eccessivo. La soluzione col doppio golfare si utilizza qualora i risers siano interni al
derrick, quando il loro peso è considerevole o quando, pur essendo esterni al
derrick, risultano particolarmente distanti dalla faccia piana.
Gli argani sono solitamente posti al di fuori di quella che viene chiamata area di
ribaltamento (“laydown area”) in posizione frontale al derrick. Questa posizione
consente agli operatori di avere una visuale completa del sistema di sollevamento
durante le operazioni di montaggio e/o smontaggio dei risers, garantendo uno
standard di sicurezza migliore rispetto ad altre soluzioni: argani laterali al traliccio o
su retro del traliccio stesso.
b) un sistema di carrucole a terra ed in elevazione che permettono la moltiplicazione
della portata degli argani;
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 14
Marzo 2011
c) uno o due blocchi di sollevamento con due carrucole nel caso di tiro in quarta, di tre
carrucole di caso di tiro in sesta etc.;
d) una trave di ribaltamento posta sul traliccio, con relativa piattaforma di
ribaltamento;
e) una trave di sollevamento posta sul traliccio, con relativa piattaforma di
sollevamento;
f) un sistema di piattaforme ribaltabili che consentono la connessione dei tronchi di
risers, tubi di servizio, tubi del vapore e delle linee elettriche, durante il montaggio,
nonché la loro separazione durante lo smontaggio;
A fronte di un maggior investimento iniziale, dovuto in parte all’equipaggiamento per il
ribaltamento/sollevamento necessario (“lifting equipment”), la soluzione smontabile
presenta notevoli vantaggi:
a) consente la manutenzione separata dei risers, dei terminali, delle linee di servizio e
di quelle elettriche, senza la fermata totale di tutti gli impianti connessi alla torcia;
b) consente di spingere al massimo la prefabbricazione dei risers in tronchi da 20-24m,
completi di tutte le tubazioni di servizio ed elettriche in officina, riducendo i costi in
cantiere;
Normalmente i derrick con risers smontabili sono dotati di scale a rampa fino alla
piattaforma per la bullonatura delle flange dei risers, per poi proseguire con scale alla
marinara fino alla piattaforma di testa posta in sommità del traliccio.
Completa la soluzione smontabile, il sistema di segnalazione aerea anch’esso smontabile e
che può essere di due tipi:
a) a fune
b) scorrevole su binario
Nel sistema a fune, le lampade sono collegate ad un cavo metallico che partendo da terra
raggiunge con un angolo di inclinazione molto acuto rispetto alla verticale, la sommità del
traliccio. La fune parte da un argano a terra, che può essere manuale o elettrico e scorre
sulla sommità del traliccio su una coppia di carrucole. Il cavo elettrico è fissato a quello
metallico. In caso di necessità, l’argano a terra può abbassare la fune, le lampade ad esse
collegate ed il cavo elettrico.
Il sistema a fune presenta i seguenti vantaggi:
a) economicità
b) facilità di installazione
c) semplicità
d’altro canto può presentare le seguenti contro indicazioni:
a) non applicabilità per strutture di grande altezze
b) scarsa resistenza per carichi molto elevati (zone cicloniche)
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 15
Marzo 2011
c) instabilità delle lampade
Nel sistema scorrevole a binario, le luci sono fissate su carrelli metallici, scorrevoli lungo
un binario tubolare cavo fissato alla struttura, all’interno del quale sono alloggiati
rispettivamente:
-
la fune metallica di trazione;
il cavo elettrico;
un elemento anti torsione del cavo metallico/elettrico
A corredo del sistema vi è un argano elettrico carrellato, per il sollevamento/abbassamento
delle lampade ed un sistema di blocco/sblocco lampade posto in sommità ad ogni binario.
Ogni lampada necessità di un proprio binario di scorrimento e di un proprio supporto
metallico.
Questo sistema presenta i seguenti vantaggi:
a)
b)
c)
d)
e)
robustezza;
protezione delle parti elettriche (essenzialmente il cavo);
stabilità delle lampade anche per forti carichi orizzontali applicati;
facilità di sollevamento/abbassamento delle lampade;
possibilità di raggiungere altezze considerevoli;
e le seguenti controindicazioni:
a) costo più elevato, dovuto alla maggior quantità di carpenteria necessaria;
b) maggiori spazi richiesti sulla struttura per il suo alloggiamento.
Dal confronto dei due sistemi appare evidente che il sistema a fune può essere indicato per
torce fino ai 100m di altezza; oltre questa soglia, il sistema a binario, pur avendo costi
superiori, sicuramente offre garanzie superiori.
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 16
Marzo 2011
4. I Carichi
4.1 Il Vento
Il vento è senza ombra di dubbio il carico di progetto principe per questo tipo di strutture.
Il carico ad esso dovuto, risulta direttamente proporzionale al quadrato della sua velocità ed
alle aree esposte, sia del traliccio che dei risers, delle tubazioni di servizio, delle scale e
delle piattaforme.
I parametri che entrano in gioco nella definizione del carico dovuto al vento sono:
¾
¾
¾
¾
¾
¾
¾
¾
velocità di progetto del vento
la pressione dei progetto del vento
coefficiente di topografia
coefficiente di rugosità
coefficiente di importanza
coefficiente di raffica
coefficiente dinamico
coefficiente di esposizione
¾ La velocità di progetto, dipende strettamente dal sito in cui si andrà a costruire la
struttura. Ogni codice ha una propria mappa per la definizione delle velocità di
progetto (“basic design wind speed”) da adottare. Di seguito un semplice confronto tra
la normativa Americana ANSI/ASCE 7/05 nella colonna a sinistra e quella Italiana
nella colonna di destra.
La basic wind speed delle ANSI/ASCE 7/05 è
definita come la velocità del vento di una raffica
con 3 secondi di periodo, ad un altezza di 10m da
terra, su di un terreno in categoria di esposizione C.
il codice definisce per macro aree degli stati uniti, il
valore da utilizzarsi come V
Il D.M. 2008 definisce la velocità di riferimento v b
come il valore caratteristico della velocità del vento
a 10m dal suolo, su di un terreno di categoria di
esposizione II, mediata su 10m e con un periodo di
ritorno di 50 anni.
¾ La pressione del vento viene calcolata a partire dalla sua velocità, solitamente definita
ad un’altezza di 10m e con un periodo di ritorno di 3sec, e da una costante che riflette
la densità dell’aria
La pressione del vento è definita come:
q z = 0.613 ⋅ K z ⋅ K zt ⋅ K d ⋅ V 2 ⋅ I (N/m 2 )
dove:
0.613
= costante che tiene conto della densità
dell’aria
Kz
= coefficiente che tiene conto della
variazione della velocità con l’altezza
K zt
= fattore topografico
Kd
= fattore di direzionalità del vento
I
= fattore di importanza
La pressione del vento è definita come:
p = c p ⋅ c d ⋅ ce ⋅ qb
dove:
cp
= coefficiente di forma
cd
ce
qb
= coefficiente dinamico
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 18
= coefficiente di esposizione
= pressione cinetica di riferimento
Marzo 2011
V
= basic wind speed
1
⋅ ρ ⋅ vb2
2
= densità dell’aria = 1.25kg / m 3
qb =
ρ
¾ Il coefficiente di topografia viene definito in base all’area dove la costruzione andrà ad
essere realizzata: esso tiene conto degli ostacoli che possono essere presenti attorno
alla costruzione
¾
Il coefficiente di topografia è definito come:
K zt = (1 + K1 ⋅ K 2 ⋅ K 3 )2
Nel codice Italiano il coefficiente di topografia ct è
interno al calcolo del coefficiente di esposizione ce
ed è di solito posto uguale ad 1 sia per le zone
pianeggianti che per quelle collinose.
con parametri definiti nella figura 6.4
¾ Il coefficiente di rugosità è in taluni codici, l’equivalente del coefficiente di topografia
e come questo, tiene conto degli ostacoli presenti accanto alla struttura.
Non è definito
Il codice Italiano definisce quattro classi si rugosità
del terreno:
A
aree urbane
B
aree urbane (non di classe A), suburbane,
industriali e boschive
C
aree con ostacoli diffusi
D
Aree prive di ostacoli
¾ Il coefficiente di importanza tiene conto dell’importanza della struttura; maggiore è la
necessità che la struttura resista anche ad eventi assolutamente poco frequenti, in
relazione alla sua importanza strategica, maggiore è il coefficiente di importanza.
Vedi tabelle 1-1 e 6-1
Non è definito nel D.M. 2008
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 19
Marzo 2011
¾ Il coefficiente di raffica (o “gust effect”) tiene conto del carico aggiuntivo dovuto alla
turbolenza del vento ed include il carico dovuto all’amplificazione dinamica a cui
sono soggette le strutture flessibili. Ricordiamo che secondo le norme americane
ANSI/ASCE 7/05, si definiscono “flessibili” le strutture con un periodo del primo
modo di vibrare < 1Hz, mentre si definiscono “rigide” quelle per le quali il primo
modo di vibrare ha una frequenza ≥1 Hz.
Il coefficiente di raffica è definito come:
⎧0.85
⎪
1 + 1.7 ⋅ g Q ⋅ I z⋅ ⋅ Q
G=⎨
⎪0.925 ⋅ 1 + 1.7 ⋅ g ⋅ I
v
z
⎩
Per le strutture rigide, ossia quelle per le quali
risulta f ≥ 1Hz
((
))
⎛ 1 + 1.7 ⋅ I ⋅ g 2 ⋅ Q 2 + g 2 ⋅ R 2
⎜
Q
R
z⋅
G = 0.925 ⋅ ⎜
1 + 1.7 ⋅ g v ⋅ I z
⎜
⎝
Nel D.M. 2008 non c’è in coefficiente di raffica vero
e proprio, ma viene definito un coefficiente di
esposizione che fa variare la pressione del vento con
l’altezza. Esso è definito come:
⎛ z ⎞⎤
⎛ z ⎞ ⎡
ce ( z ) = k r2 ⋅ ct ⋅ ln⎜⎜ ⎟⎟ ⋅ ⎢7 + ct ⋅ ln⎜⎜ ⎟⎟⎥ per z ≥ z0
⎝ z0 ⎠⎦⎥
⎝ z0 ⎠ ⎣⎢
ce ( z ) = ce (z min ) per z < z min
⎞
⎟
⎟
⎟
⎠
Per le strutture flessibili, ossia quelle per le quali
risulta f < 1Hz
¾ Il coefficiente dinamico tiene conto degli effetti riduttivi dovuti alla non
contemporaneità delle massime pressioni locali e degli effetti amplificativi dovuti alla
risposta dinamica della struttura.
Non è definito, ma può pensarsi molto affine al
coefficiente di raffica.
Nel D.M. 2008 il coefficiente dinamico è posto
uguale ad 1, per le strutture di forma regolare con
altezza non superiore agli 80m.
Per altezze superiori può essere determinato con
analisi specifiche o facendo riferimento a dati di
comprovata validità
¾ Il coefficiente di forma, dipende dalla forma del corpo che risulta esposto al vento, e le
normative ne definiscono valori diversi a secondo delle varie tipologie degli elementi
esposti.
Nel caso delle strutture a traliccio, il coefficiente di esposizione o di forma dipende dal
coefficiente di solidità, dalla sezione della struttura (triangolare o quadrata) e dalla
tipologia degli elementi che la costituiscono (tubi o profili ad angoli vivi).
Per situazioni ibride, tubi e profili a spigoli vivi insieme, occorre seguire opportune
prescrizioni se presenti.
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 20
Marzo 2011
Poiché il sistema fiaccola è di solito un insieme di elementi diversi, basti pensare ai
risers (di solito considerati come corpi cilindrici di lunghezza infinita) ed alla struttura
portante derrick (di solito considerata come struttura intralicciata o “trussed tower”) nel
calcolo del vento occorre considerare tanti coefficienti di esposizione diversi quante
sono le diverse tipologie di elementi che la costituiscono.
Inoltre occorre considerare coefficienti di esposizione diversi a secondo della direzione
del vento rispetto alla struttura; ciò è verosimilmente più vero quando si hanno
strutture derrick, per le quali si hanno coefficienti di forma diversi a secondo che il
vento agisca normalmente ad una faccia o in direzione diagonale.
Le norme ANSI/ASCE 7/05 definiscono valori del
coefficiente di forma a secondo della tipologia della
struttura e della forma degli elementi che la
compongono, per vento normale alla struttura:
- strutture tipo camini o serbatoi
- strutture a telaio costituite da elementi a spigoli
vivi o piatti
- strutture intralicciate a torre, a sezione quadrata o
triangolare costituite da elementi a spigoli vivi o
tubolari.
Nel D.M. 2008 non vengono definiti valori per il
coefficiente di forma che è funzione della tipologia,
della geometria e dell’orientamento della
costruzione rispetto alla direzione del vento.
I suddetti parametri sono definiti nella Circolare
applicativa delle Norme Tecniche sulle Costruzioni,
n° 617 del 02 Febbraio 2009.
Si può fare riferimento anche ad altri codici tipo
l’Eurocodice 1, Parte 2-4, “Azioni sulle strutture –
Azioni del vento”.
Per vento diagonale la normativa definisce un valore
moltiplicativo.
Per le strutture a traliccio, il coefficiente di forma è
definito in base al coefficiente di solidità o “solidity
ratio” a sua volta definito come:
ε=
Area esposta di una faccia
Area diuna faccia
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 21
Marzo 2011
Il calcolo della forza dovuta al vento agente sulla struttura, è dato dal prodotto di una parte
o di tutti i parametri fin qui individuati, per l’area esposta della struttura.
Per area esposta si intende la proiezione su un piano verticale perpendicolare alla direzione
del vento, delle aree effettivamente esposte di una singola faccia della struttura. Le aree
retrostanti alla faccia direttamente caricata, sono tenute in conto dal coefficiente di forma,
definito in funzione del rapporto tra l’area della faccia esposta, e l’area racchiusa dal
perimetro della faccia considerata, anch’essa proiettata sul piano verticale.
Il carico dovuto al vento è definito come:
Il carico dovuto al vento è definito come:
F = q z ⋅ Gz ⋅ C f ⋅ A f
Cf
= pressione del vento all’altezza z
= coefficiente di raffica o gust factor
= coefficiente di forma
Af
= area esposta
qz
Gz
F = p ⋅C f ⋅ Af
Cf
= pressione del vento all’altezza z
= coefficiente di forma
Af
= area esposta
p
Inoltre occorre considerare coefficienti di esposizione diversi a secondo della direzione del
vento rispetto alla struttura; ciò è verosimilmente più vero quando si hanno strutture
derrick, per le quali di solito si hanno coefficienti di forma diversi a secondo che il vento
agisca normalmente ad una faccia o in direzione diagonale.
L’applicazione del carico del vento si studia normalmente con un’analisi statica
equivalente, ma l’utilizzo dei moderni programmi di calcolo e le sempre crescenti capacità
di calcolo dei PC, consentono lo studio di “storie di carico”, mediante l’integrazione delle
equazioni del moto dovuto all’applicazione di un “profilo di vento”.
Uno dei modelli utilizzabili per il calcolo dinamico dell’azione del vento è il modello di
“Schlaich”. In esso l’effetto dinamico del vento è schematizzato con due raffiche in
risonanza con l’oscillazione propria della struttura e con picchi che raggiungono i valori
massimi caratteristici della zona dove viene realizzata la struttura.
Le ipotesi adottate sono le seguenti:
1) indicate con vs la velocità media e con v la velocità massima registrata nella località
in cui dovrà essere realizzata la struttura, si ammette che sia:
vs = 0.6 ⋅ v
Ossia si suppone che il coefficiente di raffica λ =
v
vs
, inteso come il rapporto tra il massimo
relativo di velocità riscontrabile in corrispondenza di una determinata raffica e la velocità
media v0 , sia pari a 1.67.
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 22
Marzo 2011
La struttura sarebbe allora soggetta ad una pressione cinetica massima:
q= ρ⋅
v2 v2
≅
2 16
Alla velocità vs costante, risponde una pressione cinetica agente staticamente:
qs = ρ ⋅
v s2
v2
= 0.36 ⋅
≅ 0.4 ⋅ q
2
16
La pressione dinamica diviene allora:
qd = q − q s = 0.6 ⋅ q
2) Si suppone che la raffica abbia una durata t r = 4 sec e che la pressione cinetica massima
raggiunga contemporaneamente tutti i punti della struttura
3) Si ammette che durante l’azione della raffica l’andamento della pressione cinetica in
funzione del tempo possa rappresentarsi con una semionda sinusoidale
4) Si suppone che passerà sicuramente un tempo abbastanza lungo per ritrovare una
raffica che raggiunga la massima velocità. Tuttavia, può accadere che raffiche di
minore ampiezza entrino in risonanza con l’oscillazione propria del sistema. Per tener
conto di questa possibilità, Schlaic propone di considerare dopo un intervallo di tempo
τ = 180 sec l’effetto di una seconda raffica, identica alla prima ed in risonanza con
l’oscillazione propria del sistema.
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 23
Marzo 2011
Utilizzando il modello di Schlaich , ed applicando la “Time history modal superposition” si
determinano gli andamenti nel tempo della risposta della struttura, sia in termini di
spostamento che di sforzi. Questo metodo è il più comunemente usato per calcolare la
risposta di sistemi soggetti a carichi di cui sia nota la legge di variazione nel tempo.
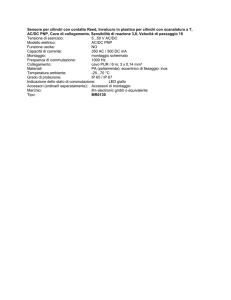
Partendo da una legge vento-tempo come quella qui di seguito
Wind - Time law
Amplitude
1.2
1.1
1.0
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
231
211
191
180.4
180.2
180
163
143
123
83
103
63
43
4
23
3
2
1
0
0.0
Tim e (sec)
Modello dinamico del vento
e combinando i modi della struttura (di solito i primi 50, per garantire l’eccitazione di
almeno il 90% della massa) si determinano gli andamenti del tempo sia dello spostamento
che degli forzi, in ogni singolo punto della struttura, come indicato di seguito per il punto
maggiormente sollecitato della struttura di esempio.
Mode 1 - Frequency = 3.9788Hz
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 24
Mode 2 - Frequency = 4.0039 Hz
Marzo 2011
Mode 3 - Frequency =4.0040 Hz
Mode 4 - Frequency = 5.8580Hz
Mode 5 - Frequency = 5.8640Hz
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 25
Marzo 2011
Displacements(cm)
Displacements - Time
60.00
55.00
50.00
45.00
40.00
35.00
30.00
25.00
20.00
15.00
10.00
5.00
3
37 4
.7
5
41
45 .5
.2
5
4
17 9
1 7 2 .5
6.
25
1
1 8 80
3.
7
18 5
1 9 7 .5
1.
25
1
1 9 95
8.
7
20 5
2
2 0 .5
6.
25
2
2 1 10
3.
7
21 5
2 2 7 .5
1.
25
2
2 2 25
8.
7
23 5
2 3 2 .5
6.
25
1
22 9
.7
5
26
.
30 5
.2
5
4
7.
75
11
15 .5
.2
5
0.
25
0.00
Tim e (sec)
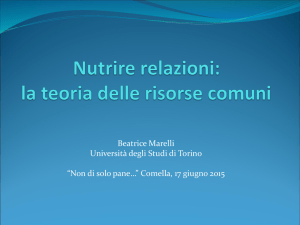
Andamento dello spostamento massimo nel tempo (cm) nel nodo i-esimo
Axial Force (N)
Axial force - Time
2200000
2000000
1800000
1600000
1400000
1200000
1000000
800000
600000
400000
200000
0
-200000
-400000
3
37 4
.7
5
41
4 5 .5
.2
5
4
17 9
1 7 2 .5
6.
25
1
1 8 80
3.
7
18 5
1 9 7 .5
1.
25
1
1 9 95
8.
7
20 5
2 0 2 .5
6.
25
2
2 1 10
3.
7
21 5
2 2 7 .5
1.
25
2
2 2 25
8.
7
23 5
2 3 2 .5
6.
25
4
7.
75
11
1 5 .5
.2
5
1
22 9
.7
5
26
3 0 .5
.2
5
0.
25
-600000
Time (sec)
Andamento dell’ azione assiale nel tempo, nell’ elemento i-esimo
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 26
Marzo 2011
0.
25
7.
75
15
.2
22 5
.7
30 5
.2
37 5
.7
45 5
.2
52 5
.7
60 5
.2
67 5
.7
75 5
.2
82 5
.7
90 5
.2
97 5
1 0 .75
5.
1 1 25
2
1 2 .75
0.
1 2 25
7.
1 3 75
5.
1 4 25
2.
1 5 75
0.
1 5 25
7.
1 6 75
5
1 7 .25
2.
1 8 75
0
1 8 .25
7.
1 9 75
5
2 0 .25
2.
2 1 75
0
2 1 .25
7.
2 2 75
5
2 3 .25
2.
75
Shear force T3 (N)
0.
25
7.
7
15 5
.2
22 5
.7
30 5
.2
37 5
.7
45 5
.2
52 5
.7
60 5
.2
67 5
.7
75 5
.2
82 5
.7
90 5
.2
97 5
1 0 .75
5
1 1 .25
2
1 2 .75
0.
1 2 25
7
1 3 .75
5
1 4 .25
2.
1 5 75
0.
1 5 25
7
1 6 .75
5
1 7 .25
2.
1 8 75
0
1 8 .25
7
1 9 .7 5
5
2 0 .25
2.
2 1 75
0
2 1 .25
7.
2 2 75
5
2 3 .25
2.
75
Shear force T2 (N)
Shear force T2 - Tim e
18000
16000
14000
12000
10000
8000
6000
4000
2000
0
Time (sec)
Andamento dell’ azione Tagliante T2 nel tempo, nell’ elemento i-esimo
Shear force T3 - Time
18000
16000
14000
12000
10000
8000
6000
4000
2000
0
Time (sec)
Andamento dell’ azione Tagliante T3 nel tempo, nell’ elemento i-esimo
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 27
Marzo 2011
0.
25
7.
7
15 5
.2
22 5
.7
30 5
.2
37 5
.7
45 5
.2
52 5
.7
60 5
.2
67 5
.7
75 5
.2
82 5
.7
90 5
.2
97 5
1 0 .75
5
1 1 .2 5
2.
12 75
0
1 2 .2 5
7
1 3 .7 5
5
1 4 .2 5
2
1 5 .7 5
0
1 5 .2 5
7
1 6 .7 5
5
1 7 .2 5
2
1 8 .7 5
0
1 8 .2 5
7
1 9 .7 5
5
2 0 .2 5
2
2 1 .7 5
0.
21 25
7
2 2 .7 5
5.
23 25
2.
75
Bending moment M2 (Ncm)
0.
25
7.
7
15 5
.2
22 5
.7
30 5
.2
37 5
.7
45 5
.2
52 5
.7
60 5
.2
67 5
.7
75 5
.2
82 5
.7
90 5
.2
97 5
10 .75
5.
11 25
2.
12 75
0
12 .25
7
13 .75
5.
14 25
2
15 .75
0.
15 25
7.
16 75
5
17 .25
2.
18 75
0.
18 25
7.
19 75
5
20 .25
2.
21 75
0
21 .25
7
22 .75
5.
23 25
2.
75
Torque moment (Ncm)
To rque mom ent - Time
90
80
70
60
50
40
30
20
10
0
Tim e (sec)
Andamento del momento torcente M1 nel tempo, nell’ elemento i-esimo
Bending mom ent M2 - Time
2000000
1500000
1000000
500000
0
-500000
-1000000
-1500000
-2000000
-2500000
-3000000
-3500000
-4000000
-4500000
-5000000
-5500000
-6000000
Tim e (sec)
Andamento del momento flettente M2 nel tempo, nell’ elemento i-esimo
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 28
Marzo 2011
Bending moment M3 (Ncm)
Bend ing moment M3 - Time
2000000
1000000
0
-1000000
-2000000
-3000000
-4000000
-5000000
-6000000
0.
25
7.
7
15 5
.2
22 5
.7
30 5
.2
37 5
.7
45 5
.2
52 5
.7
60 5
.2
67 5
.7
75 5
.2
82 5
.7
90 5
.2
97 5
10 .75
5
1 1 .25
2
12 .75
0.
12 25
7
13 .75
5.
14 25
2
15 .75
0.
15 25
7
1 6 .75
5
17 .25
2
1 8 .75
0
18 .25
7.
19 75
5
20 .25
2.
21 75
0
21 .25
7.
22 75
5
2 3 .25
2.
75
-7000000
Time (sec)
Andamento del momento flettente M3 nel tempo, nell’ elemento i-esimo
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 29
Marzo 2011
4.2 Il Terremoto
Per la natura del carico, sono più sensibili al terremoto le strutture aventi grandi masse, dal
momento che la forza orizzontale dovuta al terremoto è ad essa direttamente proporzionale.
L’analisi della struttura soggetta al carico del terremoto, può avvenire essenzialmente in
due modi:
- Analisi statica equivalente
- Analisi dinamica
Nel primo caso, la forza orizzontale totale dovuta al terremoto, viene calcolata in funzione
di vari fattori e distribuita lungo l’altezza della struttura, ai vari livelli –i,
proporzionalmente al valore della massa al livello i-esimo.
Nelle norme UBC-97 il taglio totale dovuto al
terremoto è definito come:
C ⋅I
V = v ⋅W
R ⋅T
dove:
Cv
= è il coefficiente sismico definito nella
tabella 16-R
I
= è il coefficiente di importanza definito
nella tabella 16-K
R
= coefficiente che tiene conto della duttilità
globale della struttura definito nella tabella
16-N o 16-P
T
= periodo del primo modo di vibrare
espresso in secondi
W
= carico sismico totale definito come
somma del peso proprio e di una parte dei
sovraccarichi
Il taglio totale non deve eccedere:
V=
dove:
Ca
2.5 ⋅ C a ⋅ I
⋅W
R
= è il coefficiente sismico definito nella
tabella 16-Q
e non deve essere meno di:
Nel D.M. 2008 vengono definiti due spettri di
riposta elastici: uno per le componenti orizzontali
(3.2.3.2.1) ed uno per quelle verticali (3.2.3.2.2).
A partire da questi due spettri, si definiscono:
a) lo spettro di progetto per SLE (3.2.3.4)
b) lo spettro di riposta per gli SLU (3.2.3.5)
La forza da applicare alla struttura, nell’analisi
statica è:
F ⋅ z ⋅W
Fi = h i i
z j ⋅W j
∑
j
dove:
Fh = S d (T ) ⋅ W ⋅
λ
g
Wi , W j
= è la forza da applicare alla massa
i-iesima
= pesi della massa i e della massa j
zi , z j
= sono le quote rispetto alle fondazioni,
Fi
delle masse i e j
S d (T1 ) = è l’ordinata dello spettro di progetto
= è il peso complessivo della costruzione
W
λ
= è un coefficiente che vale 0.85 se la
costruzione ha almeno 3 orizzontamenti e
1.0 negli latri casi
g
= accelerazione di gravità
V = 0.11 ⋅ C a ⋅ I ⋅ W
Per la distribuzione del taglio lungo la struttura vale
una formula analoga a quella della normativa
italiana.
La forza totale orizzontale è distribuita lungo
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 30
Marzo 2011
l’altezza della struttura in accordo alla formula
seguente:
V = Ft +
∑
n
F
i =1 i
dove:
ma < 0.25 ⋅ V
è un carico concentrato alla sommità.
Ft = 0.07 ⋅ T ⋅ V
Fx =
(V − Ft )⋅ wx ⋅ hx
∑ w ⋅h
n
1
i
i
i
con:
wx = peso al livello x
wi = peso al livello i
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 31
Marzo 2011
Nel secondo caso, la struttura è sottoposta ad una storia di carico (Response Spectrum)
definita dall’accelerogramma di progetto; le equazioni del moto dovute all’applicazione
della storia di carico vengono integrate ed il programma di calcolo fornisce come risultato
sia per gli spostamenti che per gli sforzi nelle membrature, i valori massimi ottenuti
mediante algoritmi che combinano le risposte relative ai singoli modi della struttura.
Uno degli algoritmi più noti è il SRSS o “Square Root of Sum of the Squares”. A
differenza del “Time History” il “Response Spectrum” non fornisce l’andamento nel tempo,
ma solo i valori massimi, sia per gli sforzi che per gli spostamenti.
Nel caso di analisi dinamica secondo l’UBC 97 Code, viene definito uno spettro di progetto come segue:
Fattore di zona sismica
Coefficiente di importanza sismica
Tipo di suolo
Near source factor
Near source factor
Coefficiente sismico
: (Zone C – z=0.075)
: (1, 1.25)
: (tipo SD )
: ( Na = 1 )
: ( Nv = 1 )
: Ca = 0.12 N a
(Table 16-I)
(Table 16-K)
(Table 16-J)
(Table 16-S)
(Table 16-T)
(Table 16-Q)
Coefficiente sismico
: Cv = 0.18 N v
(Table 16-R)
Lo spettro di risposta di progetto è definito nelle UBC 97, figura 16-3.
T0 = 0.2 ⋅ Ts
Ts =
Cv
2.5 ⋅ Ca
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 32
Marzo 2011
Le equazioni dello spettro sono:
per
0 < T < T0
Ca 0.18
=
T + 0.12
g
T0
per
T0 < T < Ts
Ca
= 0.3
g
per
T > Ts
Ca Cv 0.18
=
=
g
T
T
RESPONSE SPECTRUM
0. 350
)
s
'
g
(
N
O
I
T
A
R
E
L
E
C
C
A
L
A
R
T
C
E
P
S
0. 300
0. 250
0. 200
0. 150
0. 100
0. 050
0. 000
0
6
.
0
8
.
0
1
2.
1
4.
1
6.
1
8.
1
2
2.
2
8.
4.
6.
2
2
2
PERIOD (s ec)
La soluzione avviene in quattro steps:
formulazione delle equazioni del moto
1st
analisi modale
2nd
disaccoppiamento delle equazioni del moto
3rd
uso dello spettro di progetto per il calcolo del massimo sforzo o spostamento
4th
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 33
Marzo 2011
EQUAZIONI DEL MOTO
Sistema a due gradi di libertà
Se consideriamo un sistema a due gradi di libertà come quello nella figura, le equazioni del moto sono date
da:
(
) (
)
(
)
(
)
m1&y&1 + c1 y&1 − y& g + k1 y1 − y g − k2 y2 − y g − c2 y& 2 − y& g = 0
(
)
(
)
(1)
m2 &y&2 + c2 y& 2 − y& g + k2 y2 − y g = 0
Gli spostamenti relativi u1,u2 possono essere espresso in termini di spostamenti assoluti y1, y2 e del moto del
suolo y g come:
⎪⎧u1 = y1 − y g
⎨
⎪⎩u2 = y2 − y g
(2)
Le equazioni (1) possono essere scritte nella forma matriciale:
⎡ m1 0 ⎤ ⎧u&&1 ⎫ ⎡c1 + c2
⎢
⎥⋅⎨ ⎬+ ⎢
⎣ 0 m2 ⎦ ⎩u&&2 ⎭ ⎣ − c2
−c2 ⎤ ⎧u&1 ⎫ ⎡k1 + k2
⎥⋅⎨ ⎬+ ⎢
c2 ⎦ ⎩u&2 ⎭ ⎣ − k2
− k2 ⎤ ⎧u1 ⎫
⎧m1 ⎫
⎥ ⋅ ⎨ ⎬ = − ⎨ ⎬ ⋅ &y&g
k2 ⎦ ⎩u2 ⎭
⎩m2 ⎭
Per un sistema ad –n gradi di libertà, è:
[M ]{u&&} + [C ]{u&} + [K ]{u} = {m}{&y&g (t )}
dove:
[M ]
[C ]
[K ]
{u}
{&y&g (t )}
(3)
= matrice delle masse
= matrice degli smorzamenti
= matrice delle rigidezze
= vettore degli spostamenti nodali relativi
= vettore delle accelerazioni del suolo
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 34
Marzo 2011
ANALISI MODALE
L’analisi modale richiede la soluzione del sistema:
[M ]{u&&} + [K ]{u} = 0
(4)
e se consideriamo la matrice [U ] = [{u1}; {u2 };...{un }] dove {u1} , {u2 } , …, {un } sono gli n autovettori associati
agli autovalori n che solo la soluzione di:
(
)
det [K ] − ω12 ⋅ [M ] = 0
(5)
(che è la condizione necessaria affinché [M ]{u&&} + [K ]{u} = 0 abbia una soluzione diversa da quella banale;
{u1} , {u2 } , …, {un } sono i modi della struttura quando non sono applicati carichi o smorzamenti).
Possiamo introdurre il sistema di coordinate {ϕ } definite come:
{u} = [U ]{ϕ }
(6)
DISACCOPPIAMENTO DELLE EQUAZIONI DEL MOTO
Se sostituiamo le (6) nelle (3) e premoltipichiamo per [U ]T abbiamo:
[U ]T [M ][U ]{ϕ&&} + [U ]T [C ][U ]{ϕ& } + [U ]T [K ][U ]{ϕ } = [U ]T {m}{&y&g (t )}
ma:
[U ]T [M ][U ] = [I ]
[U ]T [K ][U ] = [Λ ]
Le (7) diventano:
(7)
= è la matrice identità
= è la matrice diagonale degli autovalori
[I ]{ϕ&&} + [U ]T [C ][U ]{ϕ& } + [Λ ]{ϕ } = [U ]T {m}{&y&g (t )}
(8)
Se [U ]T [C ][U ] = 2ξi ωi è una matrice diagonale, possiamo disaccoppiare le (3) ed ottenere n equazioni del
tipo seguente
ϕ&&i + 2ξiωiϕ&i + ωi2ϕ i =
∑ mϕ
n
Gli elementi
j
1
i ij &y&g
∑ m ϕ &y&
n
j
1
i ij g
i = 1,2,...n
(9)
possono essere espresso come funzioni del tempo g (t ) = &y&g e prendono l a
forma:
∑ mϕ
n
j
dove Γi =
∑ mϕ
n
j
1
i ij
1
i ij &y&g
= g (t ) ⋅ Γi
(10)
è chiamato“fattore di partecipazione modale” e le equazioni (9) diventano:
ϕ&&i + 2ξiω iϕ& i + ωi2ϕ i = g (t ) ⋅ Γi
(11)
Se introduciamo la trasformazione seguente:
ϕ i (t ) = Γi ⋅ν i (t )
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 35
(12)
Marzo 2011
E sostituiamo le (12) nelle (11) abbiamo:
Γi ⋅ν&&i (t ) + Γi ⋅ 2ξ iω iν&i (t ) + ω i2 ⋅ Γi ⋅ν i (t ) = g (t ) ⋅ Γi
(13)
ν&&i (t ) + 2ξ iωiν&i (t ) + ωi2ν i (t )
= g (t ) = &y&g (t )
Sostituendo infine le(12) nelle (6) si ha:
{u} = [U ]{Γi ⋅ν i (t )}
⎧u1 ⎫ ⎡{u1}
⎪ ⎪ ⎢
{u2 }
⎪u2 ⎪ ⎢
⎨ ⎬=⎢
⎪... ⎪ ⎢
⎪un ⎪ ⎢⎣
⎩ ⎭
⎤ ⎧Γ1ν1 (t ) ⎫
⎪
⎥⎪
⎥ ⎪Γ1ν 2 (t ) ⎪
⎬
⎥ ⎨⎪...
..
⎪
⎥⎪
{un }⎥⎦ ⎩Γ1ν n (t )⎪⎭
cioè:
u1 (t ) = u11 ⋅ Γ1 ⋅ν1 (t ) + u12 ⋅ Γ2 ⋅ν 2 (t ) + .....u1n ⋅ Γn ⋅ν n (t )
u2 (t ) = u21 ⋅ Γ1 ⋅ν1 (t ) + u22 ⋅ Γ2 ⋅ν 2 (t ) + .....u2 n ⋅ Γn ⋅ν n (t )
..........................................................................................
un (t ) = un1 ⋅ Γ1 ⋅ν1 (t ) + un 2 ⋅ Γ2 ⋅ν 2 (t ) + .....unn ⋅ Γn ⋅ν n (t )
Così lo spostamento u1 (t ) è dato come combinazione delle risposte modali:
⎧u1 ⎫
⎪ ⎪
⎪u2 ⎪
⎨ ⎬=
⎪... ⎪
⎪un ⎪
⎩ ⎭
⎧u1n ⎫
⎧u11 ⎫
⎧u12 ⎫
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪u21 ⎪
⎪u22 ⎪
⎪u2 n ⎪
⋅
Γ
⋅
ν
(t
)
⋅
Γ
⋅
ν
(t
)
+
+
⎨ ⎬ 1 1
⎨ ⎬ 2 2
⎨ ⎬ ⋅Γ2 ⋅ν 2 (t )
...
...
⎪ ⎪
⎪ ⎪
⎪... ⎪
⎪un1 ⎪
⎪un 2 ⎪
⎪unn ⎪
⎩ ⎭
⎩ ⎭
⎩ ⎭
USO DELLO SPETTRO DI PROGETTO
Se
poniamo
&y&max = Ca
(spectral
acceleration)
esso
è
funzione
dello
spostamento
spettrale ν i : Cai = ωi2ν i (dove ω i è la frequenza naturale).
L’applicazione del metodo SRSS ( Square Root of Sum of the Squares) fornisce il massimo valore dello
sforzo o dello spostamento nel singolo punto della struttura.
2
2
2
⎛
⎞
C
⎟ + ........ + ⎜ Γn ⋅ unn ⋅ an
⎟
⎜
ω n2
⎠
⎝
⎛
⎛
Ca
Ca ⎞ ⎛
Ca ⎞
u1, max = ⎜ Γ1 ⋅ u11 ⋅ 21 ⎟ + ⎜ Γ2 ⋅ u12 ⋅ 22 ⎟ + ........ + ⎜ Γn ⋅ u1n ⋅ 2n
⎜
⎟
⎜
⎟
⎜
ω1 ⎠ ⎝
ω2 ⎠
ωn
⎝
⎝
............................................................................................................
u2, max
⎛
Ca
= ⎜ Γ1 ⋅ un1 ⋅ 21
⎜
ω1
⎝
⎞ ⎛
C
⎟ + ⎜ Γ2 ⋅ un 2 ⋅ a2
⎟ ⎜
ω 22
⎠ ⎝
2
⎞
⎟
⎟
⎠
2
⎞
⎟
⎟
⎠
2
Il processore combina tutti i modi e le frequenze calcolate durante la soluzione degli autovalori e calcola gli
spostamenti e gli sforzi dovuti allo spettro di progetto.
Lo spettro di progetto è applicato in proporzioni variabili lungo le direzioni X, Y e Z.
X=1; Y=0; Z=0
per terremoto lungo l’asse x
X=0;Y=1; Z=0
per terremoto lungo l’asse Y
per terremoto lungo la diagonale
X=0.7;Y=0.7,Z=0
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 36
Marzo 2011
Di solito, viste le masse ridotte in gioco, il carico del vento è preponderante su quello del
terremoto, che difficilmente risulta essere governante.
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 37
Marzo 2011
4.3 Vortex shedding (Distacco dei vortici di Von Karman)
Per strutture o elementi strutturali snelli di forma cilindrica, ciminiere, torri, elementi di
travi reticolari, occorre tener conto dell’effetto dinamico dovuto al distacco alternato dei
vortici da un lato e dell’altro del corpo investito dal vento.
Detto distacco alternato, provoca una forza ciclica ortogonale alla direzione del vento e
all’asse del corpo cilindrico la cui frequenza è data da:
St ⋅V
d
f ⋅d
Vcr = s
St
fs =
da cui:
dove:
St
= è il numero di Strouhal, funzione della sezione e del suo orientamento rispetto alla
direzione del vento. Nel caso di sezioni circolari il numero di Strouhal è pari a
S t = 0. 2
v
d
= è la velocità media del vento
= è la sezione perpendicolare alla direzione del vento
Quando la frequenza del distacco dei vortici è prossima o uguale ad una frequenza propria
della struttura o la velocità del vento è prossima a quella critica, si possono instaurare
condizioni di risonanza con spostamenti di ampiezza sempre più grandi quanto più piccolo
è lo smorzamento e la massa della struttura.
Di solito la frequenza più critica è quella del primo modo di vibrare. Non si hanno
spostamenti significativi quando la velocità critica Vcr è > 1.2 ⋅ V progetto .
Quando si prevedono importanti effetti dovuti al continuo distacco dei vortici, occorre
prevedere particolari accorgimenti. Per i camini o le torce autoportanti detti accorgimenti
sono costituiti dall’applicazione di eliche rompi-vortice. Talvolta lo stesso effetto può
essere svolto dalle scale e passerelle che solitamente sono posizionate lungo tutto il riser.
Il fenomeno del “vortex shedding” non è da riferirsi ai soli camini o alle torce autoportanti
ma può interessare anche le singole membrature delle strutture a traliccio.
Le membrature dei tralicci possono essere verificate secondo la formula:
Vr =
f ⋅d
St
dove:
Vr
d
f
S
= è la velocità di risonanza della membratura singola espresso in (m/sec)
= diametro della membratura espressa (m)
= frequenza naturale della singola membratura(Hz)
= numero di Strouhal (0.18-0.2 per tubi in acciaio)
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 38
Marzo 2011
La velocità critica Vr deve essere più alta del grafico riportato qui sotto, in funzione
dell’altezza a cui è collocata la membratura, rispetto al suolo.
La frequenza del 1° modo può essere calcolata secondo la seguente formula:
f =
λ2
E⋅I ⋅g
⋅
2
γ ⋅A
2 ⋅π ⋅ l
dove:
λ
l
E
I
γ
A
g
= coefficiente che dipende dalla condizione di vincolo alle estremità
= 3.14 se entrambe le estremità sono incernierate (connessione a paletta)
= 3.93 se una estremità è incernierata e l’altra incastrata (connessione
flangiata)
= 4.73 se entrambe le estremità sono incastrate
= lunghezza della membratura in (m)
= Modulo di Elasticità in (t/m2)
= Inerzia della membratura in (m4)
= peso per unità di volume della singola membratura in (t/m3)
= area della singola membratura in (m2)
= accelerazione di gravità (=9.8m/sec2)
Nel caso si abbiano problemi di vortex shedding sulla singola membratura, i possibili
rimedi sono i seguenti:
a) aumentare la frequenza, cambiando le condizioni di vincolo alle estremità (parametro λ)
b) diminuire la lunghezza della membratura aggiungendo un rompitratta
c) aumentare le caratteristiche statiche della membratura (area ed inerzia)
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 39
Marzo 2011
4.4 Carichi termici
I carichi termici o comunque derivanti da azioni termiche, possono essere di due tipi:
a) Carichi termici dovuti alla temperatura di esercizio dei risers;
b) Carichi di natura termica, applicati a livello dell’inlet.
4.4.1 Carichi termici dovuti alla temperature di esercizio dei risers
Sono dovuti essenzialmente alla elongazione o alla contrazione dei riser per effetto della
temperatura di progetto o esercizio.
Normalmente la temperatura di progetto, per la quale vengono dimensionati e verificati i
risers, è più elevata di quella di esercizio ed ha un ruolo molto importante nella verifica dei
risers stessi, perché da essa dipende lo snervamento del materiale e quindi, come già detto,
la sua resistenza all’imbozzamento sotto l’effetto dei carichi esterni applicati (peso proprio
e vento).
Ciò è molto più significativo nel caso di torce strallate, dove le forze verticali di
compressione, che risultano dalle proiezioni delle tensioni nelle funi, possono risultare
particolarmente significative. Questa è la ragione per cui le torce strallate possono essere
una valida soluzione fintantoché la loro altezza non è particolarmente rilevante e le
temperature di funzionamento non sono particolarmente elevate.
Se consideriamo il seguente sketch che mostra un sistema di tre funi soggetti all’azione del vento, si ha che la
fune numero 1 è in tensione, mentre le funi 2 e 3 sono “rilasciate” o “in bando”.
3
1
2
Se v indica un movimento riferito alla fune numero 1, il movimento riferito alle funi 2 e 3 è
approssimativamente v/2.
La tensione all’interno delle funi vale:
T1' = T1 ⋅ sin α1
T2' = T2 ⋅ sin α 2
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 40
Marzo 2011
T3' = T2'
Dove:
T1'
è la tensione nella fune 1, dovuta allo spostamento v
T2'
è la tensione nella fune 2, dovuta allo spostamento v/2
T3'
è la tensione nella fune 3, dovuta allo spostamento v/2
Con le assunzioni precedenti, per l’equilibrio è:
Fexternal = T1' − 2 ⋅ T2 ⋅ cos 60 = T1' − T2' = T1 ⋅ sin α1 − T2 ⋅ senα 2
(1)
Per procedure con l’analisi delle funi, possiamo seguire il seguente schema:
Dove l, d, h and ϑ are parametri noti e w è il peso totale della fune.
Chiamiamo TiA e TiB le tensioni orizzontali nelle funi rispettivamente in A e B.
La relazione generale diviene:
TA = TB + W ⋅ sin ϑ .
La condizione teorica al montaggio è:
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 41
Marzo 2011
TiA = TiB + W ⋅ sin ϑ or TiB = TiA − W ⋅ sin ϑ
La tensione media è:
TMi =
1
sin ϑ
sin ϑ
⋅ (TiA + TiB ) = TiB + W ⋅
= TiA − W ⋅
2
2
2
Non appena la tensione media cambia, anche lo spostamento laterale cambierà, secondo l’equazione:
v=
l ⋅ secϑ
W2 ⋅d
⋅ (TM − T0 ) +
AE
24
⎛ 1
1
⋅⎜ 2 − 2
⎜T
⎝ 0 TM
⎞
⎟
⎟
⎠
Con
A
E
T0
TM
= sezione della fune
= modulo elastico dei elasticità
= tensione iniziale media
= tensione finale media
l, d, v, ϑ = grandezze geometriche note
In corrispondenza di uno spostamento orizzontale v, si ha per la fune numero 1:
v=
dove TM = T1 − W ⋅
l ⋅ secϑ ⎛
⋅ ⎜ TM
AE ⎝
⎛
⎜
sin ϑ ⎞ W ⋅ d ⎜
1
1
− TiB − W ⋅
⋅⎜
− 2
⎟+
2
2 ⎠
24 ⎜ ⎛
T
sin ϑ ⎞
M
⎜ ⎜ TiB + W ⋅ 2 ⎟
⎠
⎝⎝
2
⎞
⎟
⎟
⎟
⎟
⎟
⎠
(2)
sin ϑ
.
2
Per la fune numero 2 si ha:
−
dove TM = T2 − W ⋅
v l ⋅ secϑ ⎛
=
⋅ ⎜ TM
2
AE ⎝
⎛
⎜
sin ϑ ⎞ W ⋅ d ⎜
1
1
− TiB − W ⋅
⋅⎜
− 2
⎟+
2
2 ⎠
24 ⎜ ⎛
TM
sin ϑ ⎞
⎜ ⎜ TiB + W ⋅ 2 ⎟
⎠
⎝⎝
2
⎞
⎟
⎟
⎟
⎟
⎟
⎠
(3)
sin ϑ
.
2
Una relazione simile vale, con il solo cambiamento dell’indice, anche per la fune 3.
A questo punto sono disponibili tre relazioni algebriche che possono essere risolte mediante successive
approssimazioni.
Una volta fissati A, E, W e v, I parametri sconosciuti sono:
T1, T2 , sin α1, sin α 2 , TiB
Guardando attentamente questi termini, si possono individuare alter relazioni.
La curva che descrive ciascuna fune è una catenaria che può essere rappresentata con buona
approssimazione dall’equazione parabolica seguente:
⎡
2
⎢ sin ϑ + 4 ⋅ ⎛⎜ T ⋅ B ⎞⎟ − (cosϑ )2
⎢
⎝ W ⎠
a = d ⋅⎢
2 ⋅ secϑ
⎢
⎢
⎣⎢
⎤
⎥
⎥
⎥
⎥
⎥
⎦⎥
Dallo sketch seguente si ha:
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 42
Marzo 2011
d
2
d
xB = X −
2
X = a ⋅ tgϑ
xA = X +
d
X+
x( A)
2 = 1
y′( A) =
=
a
a
tan α
2⋅a
tan α =
=
2 ⋅ a ⋅ tan ϑ + d tan ϑ +
1
secϑ
2
⎛ TB ⎞
2
sin ϑ + 4 ⋅ ⎜
⎟ − cos ϑ
W
⎝
⎠
Usando l’ultima relazione, sin α1 e sin α 2 possono essere definiti in termini di T1 e T2 .
Un sistema pratico per risolvere il sistema algebrico precedentemente decritto, è quello di risolvere le
equazioni 2 e 3, lasciando al progettista la possibilità di definire TiB , e poi calcolare α1 ed α 2 .
Di solito due o tre tentativi sono sufficienti a raggiungere una soluzione soddisfacente.
La tensione dovuta alla espansione termica di una flare può essere calcolata come segue.
L’elongazione della flare dovuta ad un aumento della temperatura provoca un aumento di tensione nelle funi.
Dallo sketch seguente si può verificare che uno spostamento verticale produce un aumento di tensione
equivalente ad un movimento laterale pari a vH = vV ⋅ tan ϑ .
Δl ′ = vH ⋅ cosϑ
Δl = vV ⋅ sin ϑ
Se Δl ′ = Δl risulta: vH = vV ⋅ tan ϑ
Si può così scrivere l’equazione:
⎛
⎞
⎜
⎟
⎟
l ⋅ secϑ ⎛
sin ϑ ⎞ W ⋅ d ⎜
1
1
v=
⋅⎜
−
⋅ ⎜ T1 − TiB − W ⋅
⎟+
⎟
2
2
AE ⎝
2 ⎠
24 ⎜ ⎛
sin ϑ ⎞
sin ϑ ⎞ ⎟
⎛
T
W
T
W
+
⋅
−
⋅
⎟
⎜ 1
⎟
⎜ ⎜ iB
2 ⎠
2 ⎠ ⎟⎠
⎝
⎝⎝
2
con la quale si può definire una nuova tensione uguale alla tensione iniziale aumentata della tensione dovuta
all’ espansione termica della flare. La somma delle due è la tensione da considerare nel calcolo delle funi
soggette ai carichi esterni.
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 43
Marzo 2011
Anche temperature di funzionamento del riser molto basse possono essere un ostacolo alla
realizzazione delle torce strallate, soprattutto quando sono associate a temperature massime
molto elevate e questo per vari motivi tra i quali:
a) ad una temperatura di funzionamento negativa, corrisponde una contrazione della
flare e ciò provoca un decremento della pretensione iniziale;
b) d’altra parte in presenza di alte temperature di esercizio, il valore della pretensione
iniziale non può essere molto elevato perché altrimenti le funi andrebbero in crisi
sotto l’effetto combinato dei carichi applicati (vento) e termici (elongazione del
riser). Perciò il valore della pretensione iniziale viene limitato, per evitare la crisi
del sistema lato funi.
c) quando il riser durante il funzionamento, raggiunge basse temperature ed è soggetto
ai carichi orizzontali, il sistema funi si trova ad avere basse pretensioni iniziali date
dalla somma algebrica delle tensioni iniziali e della “decompressione” dovuta alla
contrazione del riser. Questa è solitamente la condizione in cui si ha la crisi lato
riser, dovuta ad eccessivi spostamenti laterali scarsamente contrastati dalle funi.
Nel caso di flares guidate da tralicci strallati o da tralicci autoportanti, l’effetto dei carichi
termici dovuti al funzionamento del risers non è così importante, dal momento che i risers
sono guidati lateralmente ma lasciati liberi di espandersi o contrarsi. L’unico effetto che
può individuarsi è l’eventuale frizione tra il riser e la guida, solitamente limitato a piccole
zone di contatto.
Nel caso di torce smontabili, i risers sono liberi di elongarsi o contrarsi, guidati da rulli.
4.4.2 Carichi di natura termica, applicati a livello dell’inlet
I carichi di natura termica applicati agli inlets, derivano dalla “stress analysis” delle linee
che arrivano alla torcia.
E’ buona norma che le linee abbiano dei “loops” distribuiti sul pipe rack, in modo da
minimizzare le azioni che esse trasmettono alla flangia dell’inlet, per effetto della
elongazione termica.
La funzione dei loops è quella di “dissipare” con la loro elasticità le forze che nascono per
effetto della temperatura.
Più grandi sono il diametro della linea, il suo spessore e la temperatura di progetto,
maggiori sono le forze che esse sono in grado di trasmettere. Il riser che è guidato dalla
torcia, difficilmente può essere utilizzato come punto fisso, perché ciò comporterebbe
spessori considerevoli.
Per questo motivo, quando si è in presenza di linee di grosso diametro e quindi rigidezza ,
una possibilità per evitare grossi carichi termici sulla flangia del riser è quella di
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 44
Marzo 2011
posizionare sulla struttura un vicolo, che non consenta alla linea spostamenti longitudinali
lungo il suo asse. In tal modo i carichi sull’inlet risulteranno limitati.
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 45
Marzo 2011
4.5 Fenomeni di fatica
Per le strutture soggette a carichi ciclici, come ad esempio l’azione del vento, può essere
richiesta la verifica a fatica di alcuni dettagli costruttivi (si pensi ai bulloni dei giunti)
considerando una distribuzione delle azioni coerente con la tipologia strutturale in esame e
con il regime di impegno previsto nel corso della vita nominale.
Il cosiddetto “Spettro di carico” definisce la distribuzione delle ampiezze delle azioni
applicate, nel corso del tempo; esso definisce il numero di ripetizioni di ciascun livello di
azione di progetto in un intervallo di tempo di riferimento.
Nella verifica dei dettagli strutturali metallici, spesso è necessario considerare spettri di
carico convenzionali differenziati, a secondo che si tratti di verifica a fatica a vita illimitata
o di verifiche a danneggiamento.
Gli spettri di tensione sono ricavati analizzando gli oscillogrammi di tensione σ (t ) indotti
nel dettaglio considerato dalle azioni dello spettro di carico assegnato, con opportuni
metodi di identificazione e di conteggio.
Per le strutture civili di solito si usano il “Metodo del serbatoio” o il “Metodo del flusso”.
Nella verifica a fatica si considerano:
- i delta di tensione di calcolo Δσ i ,d ricavati moltiplicando i delta di tensione dello spettro
per il coefficiente parziale di sicurezza per le verifiche a fatica γ Mf ;
- la curva caratteristica S-N di resistenza a fatica del dettaglio individuata mediante la
classe di resistenza Δσ c che rappresenta la resistenza a fatica del dettaglio, espressa in
MPa per N = 5 ⋅ 106 cicli.
Si rimanda a testi specifici per una trattazione più dettagliata.
4.6 Combinazione dei carichi
A seconda che si esegua un calcolo alle tensioni ammissibili, agli Stati Limite di Esercizio
(S.L.E.) o agli Stati Limite Ultimi (S.L.U.) i singoli carichi debbono combinati tra di loro
utilizzando opportuni parametri che vengono definiti dalle diverse normative.
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 46
Marzo 2011
5.1 Normativa per la definizione dei carichi di progetto e per le verifiche strutturali
Le normative più comuni nel campo delle torce sono senz’altro le normative Americane:
ANSI/ASCE 7-05 e 7-10
per il calcolo del vento e del terremoto
Uniform Building Code 97
per il calcolo del terremoto
International Building Code
per il calcolo del vento e del terremoto
ASCE Recommendation: Wind loads on petrochemical facilities
per il calcolo delle azioni sulle strutture
AISC
per il calcolo strutturale
ASME
per il calcolo a pressione
Si utilizzano spesso anche le norme Inglesi:
BS CP3 (ritirate)
per il calcolo del vento
BS 6399 Part 2
per il calcolo del vento
BS 5950-1
per il calcolo strutturale
O quelle legate al particolare paese dove si va ad operare:
AS/NZS 1170.2 (Australia-New Zealand) per il calcolo del vento
AS/NZS 1170.4
per il calcolo del terremoto
AN4100
per il calcolo strutturale
IS 875 Part 3 (India)
per il calcolo del vento
IS 1893 Part 4
per il calcolo del terremoto
NV 65
(Francia)
per il calcolo del vento
CM66
per il calcolo strutturale
RNV99
(Algeria)
RPA99
SNIP
(Ex Unione Sovietica)
EUROCODE (Europa)
Di solito le normative sono accompagnate da specifiche tecniche che le completano o ne
permettono l’applicabilità.
Un limite delle normative, soprattutto di quelle che definiscono i carichi, è che il più delle
volte non sono state pensate appositamente per le torce e perciò presentano ampie zone non
ben definite.
Si pensi ad esempio al problema della schermatura tra elementi diversi (tipicamente tra
riser e traliccio, tra riser e tubi di servizio, tra struttura ed elementi secondari ad essa
collegati) oppure al problema dell’interferenza tra elementi diversi ma contigui.
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 47
Marzo 2011
6.1 Modello di calcolo
L’evoluzione dei modelli di calcolo è legata a varie necessità che si sono fatte sempre più
esigenti nel tempo:
- necessità di ridurre i pesi e quindi i costi, utilizzando modelli di calcolo tridimensionali;
- codici sempre più stringenti, con la richiesta di verifiche che difficilmente possono
essere eseguite “a mano”;
- possibilità di utilizzare il modello di calcolo 3D come input per la preparazione dei
disegni costruttivi;
- necessità di ridurre le tempistiche;
Esistono vari programmi di calcolo automatico (Autodesk Simulation 2011 ex Algor, Staad,
Prosteel, ecc..) che consentono la modellazione strutturale in 3D ed eseguono le verifiche
strutturali secondo determinate normative.
Lo scrivente utilizza Autodesk Simulation 2011, denominato fino a qualche tempo fa
ALGOR SuperSap e quindi quanto segue è riferito al suddetto pacchetto.
A secondo di quello che si intende modellare, Autodesk Simulation consente l’utilizzo di
varie tipologie di elementi.
Per esempio se si vuole modellare una torcia autoportante o strallata, si può ricorrere ad
elementi monodimensionali (essenzialmente elementi beam) con sei gradi di libertà per
nodo. Ogni elemento è soggetto a tutte e sei le componenti degli sforzi interni; la struttura è
normalmente considerata incastrata a terra.
Nel caso di torcia derrick fissa o smontabile, il traliccio viene modellato con elementi
“beam” e “truss”, come nel caso precedente. Le membrature principali, le colonne sono
normalmente elementi “beam” incastrati; le aste di piano e i controventi di faccia sono
elementi “beam” con l’introduzione di svincoli ai nodi in modo da avere sono azioni assiali
agenti, che si traducono in tagli sui bulloni di collegamenti. Le aste rompitratta sono
modellate con elementi “truss”, soggetti alla sola azione assiale. Il traliccio è supposto
incernierato a terra.
Gli inlets, le orecchie di sollevamento, i rinforzi sui risers, le guide dei risers, sono
modellati con elementi “plate” a 4 nodi, con 5 gradi di libertà per nodo: tre traslazioni e due
rotazioni (non è definita la rotazione al di fuori del piano dell’elemento).
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 48
Marzo 2011
Torcia strallata: massimi spostamenti
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 49
Torcia strallata: massimi sforzi interni
Marzo 2011
Torcia derrick strallata – Modello
Torcia derrick strallata – Deformata
Torcia derrick strallata – Spostamenti
Torcia derrick strallata – Sforzi
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 50
Marzo 2011
Torcia derrick – Modello e carichi
Torcia derrick– Deformata
Torcia derrick – Spostamenti
Torcia derrick – Sforzi
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 51
Marzo 2011
Inlet – Modello e carichi
Gonna – Modello
Gonna – Spostamenti
Gonna– Sforzi
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 52
Marzo 2011
Orecchie di sollevamento riser smontabile - Modello
Orecchie di sollevamento - Sforzi
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 53
Marzo 2011
L’utilizzo dei programmi di calcolo 3D consente lo sfruttamento della geometria
tridimensionale con un risparmio di peso ed un reale comportamento della struttura,
rispetto al calcolo della singola faccia piana.
Il programma di calcolo 3D consente tra l’altro di esportare il modello verso programmi di
disegno con notevole risparmio di tempo.
Le verifiche strutturali sono compiute direttamente all’interno del programma di calcolo o,
mediante l’esportazione in un foglio elettronico dei files delle geometrie e dei risultati,
all’esterno del programma stesso. Di solito l’utilizzo del foglio elettronico consente le
verifiche secondo qualunque normativa, previa impostazione delle formule di verifica.
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 54
Marzo 2011
7.1 La disegnazione 3D
Esistono vari programmi di disegno 3D.
I vantaggi della disegnazione 3D sono molteplici:
- reale situazione della struttura;
- eliminazione di interferenze tra membrature;
- controllo automatico delle dimensioni;
- eliminazione di errori di disegnazione;
- produzione di normalini, per ogni singolo pezzo, che non devono essere ridisegnati in
officina, ma possono essere usati direttamente per la produzione;
- produzione dei disegni delle marche assemblate;
- produzione dei disegni di montaggio;
- produzione delle liste materiali automatiche;
- esportazione dei modelli verso programmi di modellazione dell’impianto (PDMS);
- calcolo dei pesi e dei baricentri reali della struttura;
- possibilità di modellare le parti di processo (risers, tubi di servizio, parti elettriche) fin nei
minimi dettagli eliminando le possibilità di interferenze tra la parte strutturale e quella di
processo;
- possibilità di utilizzare il modello 3D in fase di montaggio, congiuntamente con i disegni
di montaggio (facce e piani del traliccio con l’indicazione del numero di marca per ogni
singolo pezzo); consente di individuare molto velocemente la posizione di una marca
all’interno del modello, individuare il numero ed il diametro dei bulloni di collegamento.
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 55
Marzo 2011
Modellazione 3D della struttura e del piping
Modellazione 3D della struttura e del piping
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 56
Marzo 2011
Modellazione 3D della struttura e del piping
Modellazione 3D della struttura e del piping
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 57
Marzo 2011
Modellazione 3D della struttura e del piping
Modellazione 3D della struttura e del piping
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 58
Marzo 2011
8.1 Il montaggio
Il montaggio in cantiere è con la costruzione in officina, una delle fasi più delicate
all’interno della fornitura di una torcia. E’ uno dei punti di partenza della progettazione,
insieme ai dati di progetto: velocità del vento, coefficienti relativi, codice da applicare ecc.
La struttura deve essere pensata con un occhio rivolto alla sua costruzione al site.
Purtroppo, poiché talvolta l’ordine per il montaggio viene separato da quello per la
fornitura della struttura, accade che la progettazione avvenga limitando al massimo i costi
di costruzione, senza tener in alcun modo conto dell’effettiva sequenza di montaggio.
Invece l’attenzione a come la struttura verrà montata in campo, può sì richiedere piccoli
accorgimenti in fase di progettazione/costruzione, che si rivelano però decisivi nella fase
finale al site.
Il montaggio può avvenire con diverse modalità:
a)
b)
c)
d)
e)
con falcone o “flying jib”;
in un'unica sezione, con più gru;
a piccole sezioni con gru di media capacità;
a moduli completi con gru di grandi capacità;
con elicottero
8.1.1 Montaggio con falcone
Il montaggio con falcone era largamente usato in passato, quando non vi era la possibilità di
utilizzare le gru sia per mancanza di spazio (montaggio in zone impervie) o per la
mancanza di gru adatte. Il falcone viene posizionato a terra per il sollevamento della prima
sezione; quindi viene sollevato e fissato in sommità della sezione già sollevata. In questa
nuova posizione il falcone viene utilizzato per sollevare la seconda sezione. Viene poi
riposizionato sulla sommità della seconda sezione ed utilizzato per sollevare la terza e così
fino al completamento della struttura. Data la sua piccola capacità di carico, la struttura
deve essere sollevata in piccole parti; nel caso di un traliccio, vengono sollevate singole
membrature.
8.1.2 Montaggio in unica sezione
Il montaggio in un'unica sezione, possibile sia per torce autoportanti che per tralicci a riser
fissi, è tipico di quando i tempi a disposizione sono molto ridotti (si pensi ai periodi di
“shut down”, solitamente non più lunghi di 3- 4 settimane). In questo caso oltre ai carichi
esterni, la condizione di ribaltamento e sollevamento della struttura può divenire
governante. Il sollevamento in un'unica sezione prevede l’utilizzo di una gru di grande
portata che agganci la struttura in sommità; due gru a torre che sollevano la struttura
agganciandola in prossimità del baricentro. Una o più gru di ritenuta (“tailing cranes”) che
sollevano la base della struttura durante il ribaltamento. L’utilizzo di importanti mezzi di
sollevamento, può rendere il montaggio molto oneroso, ma talvolta è l’unica soluzione
possibile.
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 59
Marzo 2011
8.1.3 Montaggio a piccole sezioni
Il montaggio a piccole sezioni con gru di media capacità è il più classico dei montaggi
quando non vi siano particolari esigenze di tempo e di spazio. E’ quello che richiede la
maggior quantità di lavoro in quota e per questo motivo è quello che potenzialmente
presenta più rischi.
8.1.4 Montaggio a moduli completi
Il montaggio a moduli di grandi dimensioni, completamente preassemblati, richiede
l’utilizzo di gru di grande capacità, soprattutto quando le altezze coinvolte sono molto
elevate. A fronte di un alto costo della gru, questo tipo di montaggio consente di limitare al
minimo la durata del suo utilizzo, rendendolo così competitivo.
Ia stesura di un appropriato piano di montaggio o “erection procedure” che individui:
a) l’effettiva durata dei sollevamenti e quindi il tempo di utilizzo delle gru;
b) le posizioni delle gru e le configurazioni necessarie ai sollevamenti;
c) la disposizione dei pezzi preassemblati a terra, in modo da evitare riposizionamenti
della gru;
d) i pesi ed i baricentri delle sezioni da sollevare
e) l’esatta sequenza delle operazioni
consente un grosso risparmio di denaro in termini di giorni/uomo, poiché razionalizza le
operazioni evitando costose perdite di tempo.
8.1.5 Montaggio con elicottero
L’elicottero è utilizzato soprattutto per il montaggio dei terminali quando non sia possibile
utilizzare le gru. Il suo utilizzo è possibile anche per il montaggio di tralicci di
piccole/medie dimensioni in relazione alla massima capacità di carico, che va da 1.5t per
gli elicotteri più piccoli alle 14t circa di quelli militari.
Il costo di questo tipo di montaggio è ovviamente legato all’utilizzo dell’elicottero e può
essere molto oneroso.
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 60
Marzo 2011
8.2 Montaggio delle varie tipologie di torcia
8.2.1 Montaggio torcia autoportante
Poiché la torcia autoportante ha di solito un diametro significativo ed un’altezza non
particolarmente importante, essa è di solito montata in uno, due o più tronconi (dipendenti
dall’altezza totale) con scale, passerelle, tubi di servizio e “conduits” elettrici
generalmente preassemblati.
Il montaggio in cantiere si riduce al ribaltamento/sollevamento dei tronchi ed
all’esecuzione delle flangiature o delle saldature in corrispondenza delle sezioni di unione.
Possono essere previsti dispositivi temporanei o permanenti di centraggio dei singoli conci,
in modo da facilitare il loro posizionamento corretto, mediante l’utilizzo della gru di
sollevamento.
8.2.2 Torcia strallata
Il montaggio della torcia strallata si differenzia da quella autoportante, per la presenza degli
stralli collegati al riser. In questo caso, la sequenza di montaggio avviene ribaltando e
sollevando le sezioni di torcia, completamente preassemblate a terra, comprese tra i vari
ordini di stralli, in modo da avere sempre una struttura sufficientemente vincolata durante le
fasi intermedie di montaggio.
La tesatura degli stralli fino al valore di pretensione definito dal progettista ed il controllo
della verticalità della struttura in ogni fase, costituiscono un’altra peculiarità della torcia
strallata.
8.2.3 Torcia a derrick strallato
La torcia a derrick strallato, di solito coinvolge un derrick di limitate dimensioni in pianta
(3-4 m circa di lato). Il traliccio può allora essere preassemblato in tronchi da 12 o 24m, in
officina o al site, dipendentemente dalle possibilità di trasporto. Può anche essere spedito
sciolto in cantiere ed ivi preassemblato in sezioni da 12-24m di lunghezza, in relazione alla
gru di sollevamento a disposizione.
In questo caso, il traliccio viene ribaltato e sollevato nelle sezioni comprese tra gli ordini di
stralli. Come nel caso della torcia strallata, gli stralli devono essere tesati e la verticalità
della struttura deve essere controllata dopo ogni tesatura.
Nel caso di riser esterno al traliccio, esso può essere posizionato sia contestualmente al
traliccio, sia a traliccio montato.
Nel caso di riser interno al traliccio, esso deve essere sollevato e posizionato all’interno,
man mano che il traliccio viene sollevato ed ancorato a terra. Non sarebbe agevole
sollevare il riser e posizionarlo nel mezzo del traliccio, dopo che questo è stato
interamente sollevato.
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 61
Marzo 2011
8.2.4 Torcia a derrick fisso
La torcia a derrick fisso può essere generalmente montata in sezioni completamente
assemblate e i risers possono essere sollevati contestualmente alle sezioni del derrick, se
interni, o dopo il sollevamento della struttura se esterni. Generalmente la soluzione a risers
esterni è da preferirsi perché è la più semplice in fase di montaggio ed anche di
manutenzione. Infatti in fase di montaggio il fatto di avere i riser esterni, consente una loro
prefabbricazione maggiore (sezioni di lunghezza superiore) e quindi un risparmio di tempogru. La soluzione con riser interni comporta il montaggio in sezioni di circa 12m, al fine di
limitare la portata della gru (che deve infilare il pezzo dall’alto, scavalcando la struttura) e
facilitare l’inserimento della singola sezione all’interno delle guide.
La soluzione con risers esterni è la più comoda anche per la manutenzione; qualora sia
necessario sostituire un riser, esso può essere sflangiato o tagliato ed abbassato a terra
facilmente. Nel caso di riser interno, l’operazione di sostituzione è notevolmente più
complicata perché le singole sezioni devono essere sfilate dall’alto.
La soluzione a riser esterni è migliore anche per ragioni di sicurezza; le giunzioni tra i risers
(saldate o flangiate che siano) avvengono da una passerella di servizio dalle
dimensioni/pesi molto ridotti, ma che consentono agli operatori di lavorare in tutta
tranquillità e sicurezza.
La soluzione a riser interni implica la realizzazione di piani di lavoro provvisori, con
maggiori rischi per i lavoratori e maggiori costi.
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 62
Marzo 2011
8.2.5 Torcia smontabile
La torcia smontabile è di gran lunga la più complessa dal punto di vista del montaggio ma
è quella che consente la manutenzione delle varie fiaccole separatamente l’una dalle altre.
Il traliccio, di solito di dimensioni importanti, viene preassemblato in sezioni a terra,
completo di scale, passerelle, “radiation shields” e binari verticali di guida dei risers.
Una gru di grande capacità solleva le sezioni del derrick fino al completamento della
struttura. A questo punto di procede con il montaggio dei risers, che può essere differente a
secondo che le flares siano assistite a vapore o ad aria, con doppio tubo concentrico, uno
per il gas (interno) ed uno per l’aria (esterno).
Tutti i “lifting equipment” (carrucole e rulli per la deviazione delle funi) necessari al
ribaltamento/sollevamento dei risers, sono fissati alla struttura e sollevati con il traliccio.
Le funi per il ribaltamento ed il sollevamento, vengono posizionate sulle carrucole in
elevazione ed a terra e collegate con le taglie di sollevamento; prima di procedere al
ribaltamento/sollevamento viene eseguito il test degli argani e di tutto il sistema arganicarrucole-funi.
La sequenza di montaggio dei risers è la seguente:
a) la prima sezione del riser ad essere ribaltata e sollevata è quella in sommità con il
TIP. La sezione viene posta in posizione orizzontale, completamente assemblata, su
apposite selle di montaggio, e la base inferiore viene bullonata alla base ribaltante.
Il terminale viene flangiato al riser; vengono eseguiti i collegamenti delle linee di
servizio ed elettriche. Se le dimensioni del TIP sono molto importanti o lo è il suo
peso proprio, il terminale può essere collegato quando la prima sezione è già in
posizione verticale, al fine di non aggravare la capacità di tiro richiesta
all’argano di ribaltamento.
Talvolta, pur connettendo il terminale al risers in posizione orizzontale, la prima
sezione viene ribaltata utilizzando anche una piccola gru che “aiuta” l’argano nelle
prime fasi di tiro, inclinando la sezione fino ad un angolo di 30° rispetto
all’orizzontale.
b) Non appena la prima sezione è in posizione verticale, i bracci di guida connessi alla
sezione, vengono inseriti nei binari verticali posizionati lungo il traliccio.
Se si tratta di un traliccio a faccia piana, le guide saranno del tipo ad H. Se invece il
traliccio è con i risers interni, le guide sono tubolari. In entrambi i casi esse corrono
dalla base del traliccio fino alla sua sommità. Il loro compito è quello di guidare i
risers durante le fasi di sollevamento/smontaggio e costituiscono il vincolo laterale
durante la condizione di ”operating”.
c) Con la sezione fissata alla base ribaltante e guidata lungo la sua altezza, vengono
connessi alle apposite orecchie le due taglie di sollevamento od “hoisting block” e
le funi vengono messe in tensione.
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 63
Marzo 2011
d) Si rimuove mediante l’apposita piattaforma, la fune di sollevamento o la carrucola
se si ribalta in seconda, si sbullona la sezione dalla base ribaltante e si inizia a
sollevare con gli argani di sollevamento. Questa è la fase più delicata del montaggio
poiché occorre che i due argani siano effettivamente sincronizzati tra di loro, al fine
di evitare pericolose differenze nel tiro delle funi, con conseguente danneggiamento
del traliccio, delle carrucole e dei bracci di guida.
e) Con una velocità di circa 10m/min, gli argani di sollevamento sollevano la prima
sezione fino ad un’altezza di circa 23-24m, tanto basta per ribaltare la seconda
sezione del riser fino a portarla in posizione verticale.
f) Una nuova sezione del riser viene posizionata sulle selle di montaggio, collegata
alla base ribaltante e quindi ribaltata in posizione verticale. I bracci di guida
vengono posizionati al fine di garantire un vincolo laterale alla sezione.
g) La sezione precedentemente sollevata viene calata finché viene a contatto con
quella inferiore. Prima che ciò avvenga vengono inserite le guarnizioni sia sul riser
che sui tubi del vapore se presenti. Quindi gli operatori che lavorano in completa
sicurezza sull’apposita piattaforma posizionano i tiranti delle flange e procedono
alla loro tesatura.
h) A questo punto le due taglie di sollevamento vengono scollegate e calate fino alla
piattaforma dove verranno connessi alla sezione del riser sottostante, per procedere
al sollevamento della colonna ottenuta mediante la giunzione delle singole sezioni.
i) Ripetendo le operazioni ai punti e) -f) -g) ed h), si procede al sollevamento di tutte
le sezioni del riser.
j) Qualora si debba procedere al sollevamento di un'altra flare, occorre riposizionare le
funi di sollevamento/ribaltamento su altre carrucole e quindi ripercorrere tutte le
fasi da a) ad i).
I collegamenti elettrici, specialmente quelli relativi alle termocoppie, possono essere
realizzati in modi diversi a secondo della soluzione che si adotta:
- La prima soluzione può essere quella di posizionare i cavi all’interno di “conduit” che
terminano nelle “junction boxes” poste alla base di ogni singola sezione. In questo modo si
hanno tante giunzioni quante sono le JB; solitamente una per sezione. Le JB ed i “conduit”
vengono raccordati mediante tubi flessibili che permettono l’elongazione dei cavi elettrici
in seguito all’elongazione dei risers.
- La seconda soluzione è quella di posizionare i cavi all’interno di canaline mediante
appositi ganci che possono essere fissati man mano che il riser viene sollevato. In questo
modo le giunzioni sono solo due: una alla sommità del traliccio ed una alla sua base,
riducendo di molto la possibilità di malfunzionamento. Durante le fasi di sollevamento od
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 64
Marzo 2011
Da ultimo si procede al montaggio delle luci aeree, di solito anch’esse smontabili, e che
possono essere, come già visto, di due tipi:
-
a fune
a binario
Il primo sistema, a fune, è costituito da:
a) argano manuale/elettrico, a terra;
b) una fune che partendo dall’argano a mano, scorre su una coppia di carrucole posta
in sommità del traliccio ed è ancorata a terra nell’altra estremità;
c) telai metallici fissati alla fune;
d) luci aeree fissate a ciascun telaio;
e) cavo elettrico collegato alla fune in acciaio;
In caso di necessità, l’argano a terra svolge il cavo metallico abbassando di fatto la parte a
cui sono fissati i telai e le luci aeree, permettendone la manutenzione.
Il secondo sistema, a binario, è costituito da:
a) binario tubolare cavo, di solito rettangolare, fissato alla struttura su cui scorre la
luce. Il binario parte da terra ed arriva fino alla sommità del traliccio;
b) argano manuale/elettrico carrellato;
c) cavo in acciaio con la funzione di traino, posizionato all’interno del binario e
collegato all’argano da un lato ed ad un blocco antitorsione interno al binario,
dall’altro.
d) cavo elettrico collegato a quello metallico di traino
e) carrello metallico scorrevole sul binario a cui è fissata la singola luce; il carrello è
opportunamente zavorrato per permettere la discesa della luce in caso di necessità;
f) sistema automatico di blocco/sblocco posto in cima al binario.
Con questo sistema ogni luce necessita di un proprio set composto dai punti da a) ad f) ad
eccezione dell’argano che può essere spostato da un binario all’altro.
In caso di necessità l’abbassamento delle luci avviene come segue:
- Il cavo elettrico della luce, viene sconnesso;
- l’argano viene collegato alla base del binario; la fune sul tamburo viene connessa a quella
di traino all’interno del binario;
- il cavo metallico viene dapprima avvolto per favorire lo sgancio del sistema automatico di
blocco/sblocco della luce;
- il cavo di traino viene svolto dal tamburo dell’argano;
- per effetto del contrappeso sul carrello, la luce si abbassa scorrendo lungo il binario.
- non appena la luce è a terra si provvede alla manutenzione e quindi ripercorrendo a ritroso
le fasi precedenti, si riposiziona la luce in sommità.
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 65
Marzo 2011
Il sistema a binario sebbene sia più costoso del sistema a fune, garantisce una migliore
manutenzione e stabilità delle luci anche in condizioni di vento molto gravose.
A montaggio terminato, le carrucole a terra per il sollevamento dei risers e gli argani,
devono essere rimossi e stoccati in apposito magazzino, per prevenirne il danneggiamento.,
soprattutto quando situati in ambienti particolarmente severi (si pensi agli impianti posti in
zone sabbiose).
Le carrucole poste sul traliccio, sia sulle travi di ribaltamento e di sollevamento, possono
essere lasciate in loco, purché si utilizzino carrucole con cuscinetti autolubrificanti sigillati,
che non necessitano ulteriore manodopera.
8.3 Il piano di montaggio
Il piano di montaggio o “erection procedure” è in sintesi un documento dove viene
affrontata tutta la fase di montaggio, nei suoi vari aspetti:
-
sicurezza
organizzazione del cantiere
studio delle fasi di sollevamento
sequenza di montaggio dei risers
verifica della struttura nelle fasi di ribaltamento sollevamento
Di seguito alcuni allegati tipici di un piano di montaggio.
Il sistema fiaccola: la progettazione di dettaglio
R. Marelli
Pagina 66
Marzo 2011