Test statistici
Lo scopo di un test statistico è stabilire con quale
accuratezza un set di dati sperimentali è in accordo con
una ipotesi
Ipotesi
Statstica di test
Livello di significatività
Un esempio con la selezione di particelle
Il lemma di Nyman-Pearson
Costruzione di una statistica di test: discriminante di Fisher
Test di bontà del fit
Significatività del segnale osservato
Test del 2
Alessandro De Falco, INFN Cagliari
1
8/19/09
Ipotesi e statistica di test
Supponiamo che il risultato di una misura sia x = x 1, x 2,. .. , x n
dove le xi sono proprietà dell'evento: es.
x1: molteplicità delle particelle cariche
x2: posizione del vertice primario
x3: energia trasversa
........
La distribuzione di probabilità congiunta di x sarà
caratteristica dell'evento prodotto es. p p J / ,
p p hadrons , ...
La distribuzione di probabilità congiunta è specificata da una
IPOTESI H0, solitamente confrontata con ipotesi alternative
Ipotesi semplice: f x
Ipotesi composita:
f
x∣H 0 , f
x∣H 1 ...
completamente specificata
f
x ,
data con non noto.
Solitamente è complicato trattare la x multidimensionale
Per valutare l'accordo di una data ipotesi coi dati, si costruisce
una statistica di test t(x), solitamente di dimensione minore in
modo da compattare i dati senza perdere la capacità di
discriminazione
Alessandro De Falco, INFN Cagliari
2
8/19/09
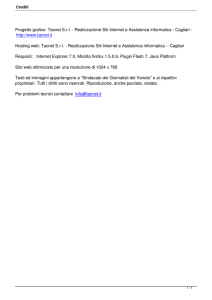
Regione critica
La statistica t avrà pdf g t ∣H 0 , g t ∣H 1 ...
Si formula una affermazione sulla
compatibilità tra dati e ipotesi in
termini della decisione di accettare o
rigettare l'ipotesi H0
Rigettiamo gli eventi se
appartengono a una regione critica
(es. t>tcut ) in cui è improbabile che H0
sia verificato
Probabilità di rigettare H0 quando è
vero (errore di 1a specie):
∞
=∫ g t∣H 0 dt
t cut
Probabilità di accettare H0 se è vero H1 t
(errore di 2a specie):
=
cut
∫ gt∣H 1 dt
−∞
Alessandro De Falco, INFN Cagliari
3
Livello di significatività
(1­)=potere di reiezione
8/19/09
Esempio: selezione di particelle
Dobbiamo identificare n particelle distinguendo il segnale dato dagli
elettroni dal fondo dovuto ai pioni, mediante la misura di perdita di
energia in una camera a deriva. (suppongo noto l'impulso). Definiamo:
t: media troncata delle misure.
H0: segnale (elettroni)
H1: fondo (pioni)
Definiamo un taglio t<tCUT che ci permette di selezionare gli elettroni:
t CUT
e = ∫ g t∣e dt=1−
efficienza di selezione per elettroni
= ∫ gt∣ dt=
efficienza di selezione per pioni
−∞
t CUT
−∞
la scelta di tCUT sarà un compromesso tra il valore più alto di e e il più
basso per .
Se la frazione ae di elettroni non è nota, il problema diventa una stima
di parametri: t sarà distribuita secondo la:
f t ; ae =ae gt∣e1−ae gt∣
Alessandro De Falco, INFN Cagliari
4
a=1−ae
8/19/09
Il numero di particelle accettate sarà:
N acc =e N e N =e N e N tot − N e
N e=
N acc − N tot
e −
Mediante il teorema di Bayes possiamo determinare la
probabilità h(e|t) ( h(|t) ) che la particella considerata sia
un elettrone (o un pione) per un determinato valore di t:
h e∣t =
ae g t∣e
h∣t =
a e g t∣ea g t∣
a gt∣
a e g t∣ea gt∣
(nota: secondo l'approccio bayesiano h(e|t) è la probabilità soggettiva, secondo l'approccio frequenzistico è la frazione di elettroni ad un dato t)
La purezza del campione selezionato è data da:
t CUT
p e=
n e con tt CUT
n all con t t CUT
Alessandro De Falco, INFN Cagliari
=t
a e g t∣e dt
∫
−∞
CUT
a e gt∣e1−a e gt∣ dt
∫
−∞
5
t CUT
=
h t∣e f t dt
∫
−∞
t CUT
∫
−∞
f t dt
8/19/09
Il lemma di Neyman­Pearson
Consideriamo una statistica di test
t =t 1, t 2,. .. , t n
Cerchiamo la scelta ottimale dei tagli che permettono di
selezionare il segnale H0 dal fondo H1, ovvero che
permettono di rendere i più piccoli possibile sia α che β.
Il lemma di Neyman-Pearson asserisce che per ottenere la
purezza più alta per una determinata efficienza, si deve
definire la regione di accettanza nello spazio delle t in
modo che:
g t ∣H 0
g
t∣H 1
c
dove c è una costante che determina l'efficienza della
selezione, che va fissata opportunamente per la misura
specifica
Alessandro De Falco, INFN Cagliari
6
8/19/09
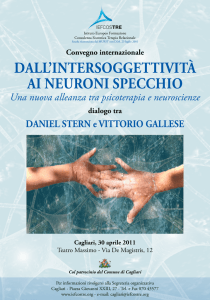
Test di Neyman Pearson: un esempio
Diversi siti producono due varietà di diossido di silicio:
g
g
=2.6
Opale:
Quarzo:
=2.2
cm
3
cm 3
Misuriamo la densità con una risoluzione di 0.2 g/cm3
Per quali siti è opportuno eseguire ulteriori scavi?
Ipotizziamo che il campione sia opale.
La probabilità è descritta da una gaussiana con µ=2.2, σ=0.2
Per l'ipotesi alternativa la pdf è ancora gaussiana con µ=2.6, σ=0.2
− x−2.6 / 2
e
10x
Il rapporto tra le gaussiane è:
∝e
− x−2.2 / 2
e
2
2
2
2
Il rapporto cresce con x; un taglio su x permette la determinazione
ottimale di β, fissato α
Se accettiamo solo i campioni con ρ<2.53 (1.64 σ sopra la media)
α=5%: ignoriamo il 5% dei campioni utili; β=36%: analizziamo
inutilmente il 36% dei depositi di quarzo.
Selezioni diverse possono essere effettuate a seconda della necessità
Alessandro De Falco, INFN Cagliari
7
8/19/09
Costruzione di una statistica di test
Esempio:
H 0=e e WW adroni 4 jets
H 1 =e e q q
adroni 2 jets
t
x =
−
f
x∣H 0
f
x∣H 1
−
misuro
x = x 1, x 2,. .. , x n
taglio su t per selezionare WW.
Mi occorre conoscere f x∣H 0 , f x∣H 1
Monte Carlo
generatore
Genero degli eventi, e per ciascuno costruisco x con cui riempio
un istogramma n-dimensionale. Se per ogni dimensione ho M
bins, il numero totale di celle è Mn
Approssimo f(x|H) con la probabilità nella cella singola,
determinando gli Mn parametri.
Per n grande, il numero di celle cresce tanto da rendere
impossibile una generazione MC con sufficiente statistica
Alessandro De Falco, INFN Cagliari
8
8/19/09
Una soluzione di compromesso consiste nel
definire una funzione t(x) con meno parametri
Determinare i parametri col Monte Carlo per ottenere la migliore
discriminazione tra H0 e H1
n
Es.:
T
t x = ∑ ai x i =
a x
i=1
scelgo le ai che massimizzano la separazione tra g(t|H0)
e g(t|H1)
La media e la covarianza per le componenti di x sono:
k i =∫ x i f x∣H k d x
k=0,1
i,j=1,2,...,n
V k ij =∫ x−k i x−k j f x∣H k d x
per t(x):
Richiedo:
T
k =∫ t gt∣H k dt =
a k
2
T
2
k =∫ t −k gt∣H k dt=
a Vk
a
∣ − ∣
grande 0 1
2
2
piccoli 0 , 1
Alessandro De Falco, INFN Cagliari
(pdf concentrate intorno alle medie)
9
8/19/09
Discriminante lineare di Fisher
Definiamo come misura della separazione
2
J
a =
0 −1
2
2
0 1
2
n
n
i , j=1
i , j =1
T
0 −1 = ∑ ai a j 0 −1 i 0−1 j = ∑ ai a j B ij =
a B
a
2
2
n
T
0 1 = ∑ ai a j V 0 V 1 ij =
a W
a
i , j=1
J
a =
T
a B
a
T
a W
a
cerco le ai che massimizzano J:
∂J
∂ ai
=0
a ∝W
−1
0 −1
DISCRIMINANTE LINEARE
DI FISHER (determinato a meno
di una costante)
Nota: ho usato non l'informazione completa su f(x|H0), f(x|
H1) (n-dimensioni*M bins) ma solo i valori medi e le
varianze
Alessandro De Falco, INFN Cagliari
10
8/19/09
Posso generalizzare t(x):
n
t x =a 0 ∑ a i x i
i=1
Uso una scala arbitraria e l'offset a0 per fissare 0, .
In questo caso la massimizzazione di:
2
J
a =
0 −1
2
2
0 1
corrisponde alla minimizzazione di:
2
2
2
2
0 1 =E 0 [t −0 ] E 1 [t−1 ]
Alessandro De Falco, INFN Cagliari
11
8/19/09
Test statistici
Supponiamo che l'ipotesi H predica f(x|H) per qualche
vettore di dati x=(x1,x2,....,xn)
Osserviamo un solo punto: xOBS. Che cosa possiamo dire
della validità di H alla luce dei dati?
Decidiamo quale parte nello spazio delle x rappresenta
una minore compatibilità con H rispetto a xOBS.
Alessandro De Falco, INFN Cagliari
12
8/19/09
Solitamente si costruisce una statistica di test il cui valore
riflette il livello di compatibilità tra x e H, ovvero:
A bassi valori di t corrispondono dati PIU' compatibili con H
Ad alti valori di t corrispondono dati MENO compatibili con H
Supposta nota la p.d.f. f(x|H), si può determinare g(t|H)
Esprimiamo la bontà del fit fornendo un valore che viene
chiamato LIVELLO DI SIGNIFICATIVITA' o P-value.
P è la probabilità di osservare i dati x (o t(x)) che hanno
uguale o minore compatibilità con H rispetto a xOBS.
P non è la probabilità che H sia vero.
Nell'approccio classico non si prova a dare una probabilità
che H sia vero, dato che un'ipotesi non è trattata come una
variabile casuale
Nell'approccio bayesiano:
P H∣t =
P t∣H P H
∫ P t∣H P H dH
è necessario fare un'ipotesi su P(H)
Alessandro De Falco, INFN Cagliari
13
P(H): probabilità a priori di H
8/19/09
Un esempio:
La probabilità di osservare nT teste in N lanci di una moneta è:
f nT , N =
N!
nT ! N −nT !
nT
P T 1− PT
N −n T
Ipotesi H: PT =0.5
Usiamo la statistica t =∣nT − N / 2∣
per verificare la bontà
dell'ipotesi
Supponiamo di lanciare la moneta 20 volte e ottenere 17 volte
testa
t OBS =7
La regione dello spazio delle t con compatibilità uguale o minore
è t>=7
P−value= Pt ≥7=P nT =0,1,2,3,17,18,19,20=0.0026
Ciò non ci dice che l'ipotesi H è falsa, ma ci dà solo la probabilità
di ottenere un livello di incompatibilità con l'ipotesi H maggiore
o uguale rispetto a quello osservato.
Alessandro De Falco, INFN Cagliari
14
8/19/09
Significatività di un segnale osservato
Supponiamo di avere n eventi che possono essere:
nB eventi da processi noti, che costituiscono il fondo
nS eventi da processi nuovi, che costituiscono il segnale
Se nB e nS sono poissoniane con medieB e s, anche n = nB + nS
è poissoniana con B + s
n
P n ; S , B =
S B
n!
e
− S B
Supponiamo di osservare nOBS=5 con B=0.5.
Possiamo affermare di avere osservato l'evidenza per una
scoperta?
Ipotesi H: s=0, ovvero c'è solo fondo.
P−value= P n≥nOBS =
∞
∑
n=n OBS
P n ; S =0, B =1−
nOBS −1
∑
n=0
n
b
n!
e
− B
=1.7⋅10−4
Questa quantità NON è P(s=0), ma la probabilità di ottenere 5 o
più eventi, supposto s=0.
Alessandro De Falco, INFN Cagliari
15
8/19/09
Una nota:
Spesso il risultato di una misura è dato come il valore stimato ±
la sua deviazione standard. In questo caso abbiamo 5± 5
Se sottraiamo il fondo, pari a 0.5, otteniamo
Ovvero solo 2 deviazioni standard dallo 0.
4.5 ± 2.2
Questo è fuorviante perchè in questo modo il risultato dà
l'impressione che non ci sia una grande incompatibilità con
l'osservazione di zero eventi, mentre il P-value suggerisce il
contrario.
Ciò che ci serve in questo caso è la probabilità che il fondo, con
valore medio 0.5, fluttui fino a 5, e non la probabilità che una
variabile con valore medio 5 fluttui fino a 0.5 o meno.
Alessandro De Falco, INFN Cagliari
16
8/19/09
Nota: normalmente B avrà un'incertezza. Se fosse B=0.8,
avremmo:
P−value= P n≥nOBS =
∞
∑
P n ; S =0, B =0.8=1.4⋅10
−3
n=n OBS
un ordine di grandezza più alto del precedente.
E' dunque necessario quantificare l'incertezza sistematica
dovuta al fondo.
La procedura corretta consisterebbe dunque nel riportare un
range di valori di P per una variazione ragionevole di B.Non
esistono delle convenzioni fissate.
Alessandro De Falco, INFN Cagliari
17
8/19/09
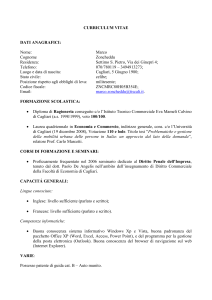
Estrazione di un segnale da un picco.
Supponiamo di misurare per ogni
evento una grandezza x, e di saper
valutare il fondo, indicato con la curva
tratteggiata.
11 eventi osservati nei due
bin del picco. Il fondo stimato è pari a B=3.2 eventi
P n≥11 ; B =3.2, S =0=5.0⋅10
−4
Ciò significa che abbiamo effettivamente visto il segnale?
Non sappiamo a priori dove aspettarci il picco.
Se il numero di bins è alto ci saranno delle fluttuazioni che
simuleranno delle discrepanze rispetto all'andamento atteso
(tratteggiato in figura)
✔
Quale è la probabilità di osservare una discrepanza altrettanto
improbabile quanto il picco osservato in due bin adiacenti qualunque
dell'istogramma?
Alessandro De Falco, INFN Cagliari
18
8/19/09
Test del
Test per confrontare i dati osservati ni con i valori di
aspettazione i.
Tracciamo in un istogramma di N bins una variabile x con
una distribuzione determinata.
Supponiamo che i conteggi nel bin i-mo siano ni , e il valore
aspettato i .Se le ni sono poissoniane con valori medi i e
ni>~5, la variabile:
n n − 2
2
=∑
i=1
i
i
i
seguirà una distribuzione del con n gradi di libertà
(indipendentemente dalla distribuzione di x).
La richiesta ni>5 equivale a richiedere che la distribuzione
delle ni sia approssimabile a una gaussiana.
Maggiore è il maggiore la discrepanza col valore atteso
∞
Il P-value sarà:
distribuzione del con P=∫ f x ; n dx
Alessandro De Falco, INFN Cagliari
2
19
n gradi di libertà
E(x)=n
8/19/09
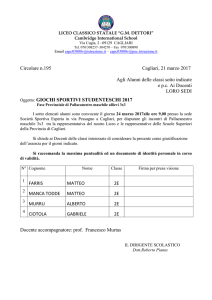
Nel caso in cui il numero di eventi per bin è
piccolo, non si può più assumere che le ni siano
approssimativamente gaussiane, e la variabile
così costruita non seguirà più una distribuzione
del con n gradi di libertà, ma dipenderà dalla
pdf della variabile x.
Nel caso della figura, 2=29.8, n.d.f.=20, ma in
quasi tutti i bins n<5.
Il P-value può essere ottenuto determinando la
distribuzione della statistica col Monte Carlo:
Genero le nI poissoniane con valore medio
i
Calcolo il 2
Reitero il processo N volte fino ad ottenere
una distribuzione del 2 Monte Carlo
Integro questa distribuzione per ottenere il
P-value
In questo modo ottengo P=0.11 (con la
distribuzione del 2 avrei ottenuto P=0.073)
In questo caso il test del non fornisce l'evidenza
per la presenza di un picco.
Alessandro De Falco, INFN Cagliari
20
8/19/09