FISICA
A.A. 2013-2014
Ingegneria Gestionale
7° prova del 16 Aprile 2014
Lo studente descriva il procedimento e la soluzione degli esercizi proposti. Gli elaborati verranno ritirati
Mercoledì 23 Aprile e saranno valutati ai fini del superamento dell’esame finale.
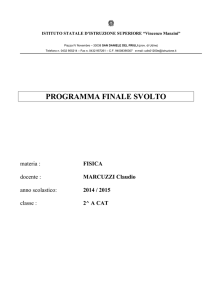
1. Una sottile barretta, omogenea di massa M=1kg e lunghezza L=30cm può ruotare
senza attrito intorno ad un asse fisso orizzontale passante per O. Inizialmente si
trova in quiete nella posizione di equilibrio instabile in figura. Essa viene colpita
centralmente da un proiettile di massa m=150g a velocità vo=200m/s come in
figura. Nell’ipotesi che il proiettile rimanga conficcato nella barretta si calcoli la
velocità del centro di massa quando transita nel punto più basso della sua
traiettoria (nel punto di equilibrio stabile)
vo
L
L/2
O
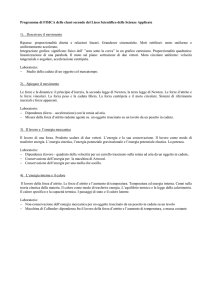
2. Un cilindro ed una sfera entrambi di raggio R e di massa m, posti sulla sommità h=1m di un
piano inclinato di angolo rotolano senza strisciare sino a valle. Calcolare le rispettive
velocità finali ed i tempi rispettivamente impiegati. (Si assuma I cil mR 2 2 , I sfera 2mR 2 5 )
3. Un operaio di massa M=70kg sale su di una scala di massa m=10kg e di
lunghezza L=3m appoggiata ad una parete disposta come in figura.
Considerando il pavimento scabro con coefficiente di attrito
statico s 0.5 , si calcoli qual è l'altezza massima h cui può salire senza
rischio di cadere insieme alla scala. Si assuma =60°.
L
h
O
4. Un pendolo composto è formato da un’asta rigida omogenea di massa M=4kg,
di lunghezza L=40cm, libera di ruotare intorno al cardine O. All’estremo della
sbarra è anche alloggiata una piccola massa m=1kg. Supponendo di imprimere
una piccola velocità v=0.5m/s all’estremo libero dell’asta, determinare l’angolo
massimo di oscillazione del sistema e fornire una stima del tempo necessario
per tornare nella posizione verticale di partenza. [Suggerimento: Iasta=ML2/3]
M
m
L
v
Una palla da bowling è lanciata con velocità vo 7 m s sulla corsia in modo che
5
inizialmente slitti senza ruotare (pura traslazione). Il coefficiente di attrito tra la palla e la corsia è
0.2 . In conseguenza della forza di attrito la palla prenderà a ruotare fino all’instaurarsi di un
moto di puro rotolamento. Si determinino le seguenti grandezze cinematiche: (a) l’accelerazione del
centro di massa ac, (b) l’istante in cui la palla comincia a rotolare trot , (c) le espressioni delle
velocità del centro di massa vc t e del punto di contatto con il suolo vB t calcolate all’istante
iniziale t=0, dopo t=1s e al rotolamento t=trot, (d) lo spazio percorso fino all'istante di rotolamento,
(e) i valori delle energie cinetiche a t=0 , e a t= trot . Dati m=4kg, I c 2mr 2 / 5 .
6. Tre blocchi di massa mA=10 kg, mB=5 kg, mC=3 kg , sono collegati come
in figura da due funi inestensibili e di massa trascurabile che passano
attraverso due pulegge di raggio R e di massa rispettivamente M1=1.5 kg e
M2=2.5 kg. Sapendo che la massa mB si muove senza attrito sul piano di
appoggio, determinare l’accelerazione comune con cui si muove il gruppo. [Il
momento di inerzia di una puleggia rispetto al proprio asse vale
I=MR2/2].Determinare inoltre le 4 tensioni delle funi.
M2 Tf
Th
mC
mB
Te M1
Td
mA
FISICA
A.A. 2013-2014
Ingegneria Gestionale
Soluzioni della 7° prova
1. L’urto è anche in questo caso perfettamente anelastico. Ma il moto della barretta dopo
l’urto è questa volta di pura rotazione intorno all’asse per il cardine O. Considerando il
sistema complessivo, nell’urto si sviluppano solo forze interne e forze sul cardine O. Il
momento di queste forze calcolato sull’asse per O è quindi nullo per cui si conserva il
momento della quantità di moto del sistema. Prima dell’urto bo mvo L 2 mentre dopo
(a)
C
L/2
O
l’urto bo I o dove I o mL 2 2 ML2 3 =0.033kgm2. Dalla conservazione di bo si
ottiene la velocità angolare iniziale o mvo L 2 I o 6vo m 3m 4M L 134.8 rad/s.
C
U=0
v
c
Appena dopo l’urto la barra si sposta dalla posizione di equilibrio instabile (a) e si
rovescia oscillando intorno alla posizione di equilibrio stabile (b). Durante la rotazione
(b)
l’energia meccanica totale si conserva per cui Ua+Ta=Ub+Tb. Fissando come
riferimento dell’energia potenziale quello dello stato (b), si ha ovviamente Ub=0 mentre
Ua=(m+M)gL (dopo l’urto nel centro di massa si concentra la massa complessiva m+M).
L’espressione dell’energia cinetica di pura rotazione intorno ad O è invece T I o 2 / 2 .
Imponendo la conservazione dell’energia meccanica si ha quindi I oo2 / 2 m M gL I ob2 2
da cui la velocità angolare in (b) vale b o2 2m M gL I o =135.5 rad/s.
2. Le forze agenti sul corpo sono: la forza peso P=mg applicata nel baricentro
C, che può pensarsi scomposta nelle due componenti lungo i due assi normale e
tangenziale Pt=Psin e Pn=Pcos , la reazione normale Rn applicata sul punto
di contatto e diretta lungo n, e la forza di attrito statico As applicata sul punto di
contatto e contraria al moto lungo t. (si ricorda che l’attrito è statico perché nel
puro rotolamento il punto di contatto è fermo!). La 1a equazione cardinale
proiettata lungo gli assi n,t si scrive
r
C
Pt
Rn
As
tˆ Pt As mac
da cui ricaviamo la
nˆ Rn Pn 0
vc
Pn
t
h
reazione normale Rn Pn mg cos . Per ricavare l’accelerazione del centro
di massa ac è però indispensabile applicare la 2a equazione cardinale proiettata sull’asse orizzontale
per il centro di massa C; l’unico momento non nullo è il momento della forza di attrito che mette in
rotazione il corpo M C As r I c d dt (si noti che per semplicità è stata adottata la convenzione
per cui è positivo per rotazioni orarie) essendo Ic il momento di inerzia rispetto al centro di
massa. La condizione di rotolamento impone che vc t t r che vale anche derivando nel
d
2
tempo ambo i membri per cui ac t
r da cui l’attrito vale As ac I c r . Sostituendo questa
dt
espressione nella 1a equazione cardinale si ottiene
mac mgsin ac I c r 2
l’accelerazione del centro di massa è costante ac gsin 1 I c mr 2
da cui
. Il moto è quindi
uniformemente accelerato con vc t act e spazio percorso st act 2 2 . Il tempo t* per
percorrere
lo
spazio
fino
alla
base
del
piano
L=h/sin
è
quindi
tcilindro 1.11s
mentre
le velocità finali sono
t* 2 L ac 2h gsin 2 1 I c mr 2
tsfera 1.07 s
n
I vcilindro 3.61 m s . La sfera arriva prima perché ha un momento d’inerzia
vC 2 gh 1 c
mr 2 vsfera 3.74 m s
minore e l’energia cinetica della sfera viene ripartita più efficientemente nell’energia traslazionale
del centro di massa più che nell’energia rotazionale intorno al centro di massa.
y
3. Le forze agenti sul sistema sono le seguenti: il peso della scala Ps applicato
RnD
nel baricentro C (a metà della lunghezza della scala), il peso dell’uomo Pu D
applicato sulla scala nel punto E (ad altezza h dal suolo), la reazione del
E
pavimento applicata nel punto di contatto B che si compone di una reazione
C
Lsin()
normale RnB e di una forza di attrito statico orizzontale As, ed infine la reazione
della parete verticale RnD applicata nel punto di contatto D. In condizioni
RnB
Pu Ps
statiche la somma vettoriale di tutte le forze deve annullarsi (1a equazione
cardinale) come anche la somma di tutti i momenti delle forze deve annullarsi
x
As B
(2a equazione cardinale). Scomponiamo la 1a equazione cardinale lungo x, y:
xˆ RnD As 0
Lcos()/2
da cui ricaviamo il valore di RnB=Pu+Ps ed una
yˆ RnB Pu Ps 0
h/tg()
condizione sull’attrito statico As=RnD insufficiente però per determinarlo (1 equazione in 2
incognite!). L’attrito As viene infatti determinato grazie alla 2a equazione cardinale applicata per
semplicità ad un asse orizzontale per B. In questo caso contribuiranno solo i momenti della
reazione della parete verticale RnD con braccio Lsin da B, del peso della scala Ps con braccio L/2
cos da B, ed infine del peso dell’uomo Pu con braccio hcotg da B (gli altri 2 momenti, di
braccio
nullo,
sono
nulli).
La
condizione
statica
impone
che
M B Pu h cot g Ps L cos 2 RnD Lsin 0 (si noti che il momento di RnD è negativo perché
tenderebbe a far ruotare la scala in senso orario) da cui si ricava
As RnD P u h Lsin tg Ps 2 tg . L’attrito trovato è quello richiesto dalla condizione di
staticità. Esso può essere fornito solo se è inferiore al valore massimo
As Amax s RnB s Pu Ps . Il caso limite As Amax corrisponde all’altezza hmax da cui si
ricava hmax L
sin 2
cos
Ps
1
3 / 4 1 10 1
1
3
2.386 m
s s
Pu
2tg
1 / 2 2 70 2 2 3
4. Calcolo energia meccanica nello stato (a)
Il sistema è dotato di un momento di inerzia complessivo dato da:
ML2
L2
M 3m
I tot I asta I m
mL2
3
3
Assumendo nulla l’energia potenziale complessiva nello stato (a),
l’energia meccanica coincide con l’energia cinetica di rotazione
O
L(1-cos)/2
rif2
(b)
2
E ma
1
1 v
1
Ta I tot a2 I tot M 3m v 2
2
2 L
6
L(1-cos)
(a)
Calcolo energia meccanica nello stato (b)
Essendo nulla l’energia cinetica nello stato (b), l’energia meccanica diviene
L
gL
M 2m 1 cos
E mb U b Mg 1 cos mgL1 cos
2
2
dove sono stati distinti i riferimenti per le masse m, M
rif1
v
Infine imponendo la conservazione dell’energia meccanica E ma E mb
v 2 M 3m
si può calcolare l’angolo massimo di oscillazione arccos1
12° 47’
3 gL M 2m
Calcolo del periodo di oscillazione:
Quando il pendolo composto è fuori dalla sua posizione di equilibrio, il momento
delle due forze peso tende a far ruotare il sistema verso la posizione di equilibrio
O
Applicando la seconda equazione cardinale M oext
dove M oext MgL sin / 2 mgL sin
dbo
d
I tot 2
dt
dt
2
Lsin
gL
M 2m
2
Mg
Lsin
mg
L’equazione differenziale è quindi
T 2
d 2 gLM 2m
0 che prevede oscillazioni di periodo
2 I tot
dt 2
2 I tot
2 L M 3m
2
1.12 s.
gLM 2m
3 g M 2m
Il tempo necessario per tornare in posizione verticale è quindi T/2 = 0.56 s
5. Il moto della palla può essere visto come la sovrapposizione di due moti: un
moto di semplice traslazione a velocità vc(t) ed un moto di semplice rotazione
intorno al centro di massa C con velocità angolare (t). All’istante iniziale la palla
vc
C
ha solo un moto di traslatorio per cui vc(0)=vo mentre (0)=0. Una volta lanciata
P
r
le forze agenti sulla palla sono: la forza peso P, la reazione normale Rn e l'attrito A
Rn x
con la pista. La reazione Rn è opposta alla forza peso P, mentre l'attrito A agisce
A B
contrariamente al movimento del punto di contatto B che ha velocità di
a
strisciamento vB(t)=vc(t)-(t)∙r diretta lungo l’asse x. Applicando la 1 equazione
cardinale lungo gli assi x,y si ottiene l’equilibrio delle forze lungo y (Rn=P=mg), e la presenza della
sola forza di attrito lungo x ( mac, x A Rn mg ) che causa una decelerazione uniforme
del centro di massa ac g = -1.96m/s2, che integrata dà la velocità di traslazione cercata
vc t gt vo . Per caratterizzare il moto rotatorio è invece indispensabile applicare la 2a
equazione cardinale proiettata lungo l’asse orizzontale per il centro di massa C. L’unico momento
non nullo è il momento della forza di attrito Ar (il braccio coincide con il raggio r della palla) che
mette in rotazione la palla con accelerazione angolare costante M C Ar I c d dt (si noti che
per semplicità è stata adottata la convenzione per cui è positivo per rotazioni orarie) da cui
d dt mgr I c , che integrata fornisce la velocità angolare di rotazione t mgr I c t . La
forza di attrito agisce quindi in modo da diminuire lo strisciamento del punto di contatto B,
diminuendo vc(t) ed aumentando (t). Quando il punto di contatto si ferma vc(trot)-(trot)∙r, si
instaura il regime di puro rotolamento e l’attrito di strisciamento scompare. Imponendo la
condizione di puro rotolamento si ottiene vc trot gtrot vo trot r g mr 2 I c trot da
cui si ottiene trot vo g 1 mr 2 I c
e per una sfera
trot 2 vo 7 g 1.02s. Per le velocità nei
vc (0) 7 m s
punti C e B si scrive vc 1 5.04 m s
v (1.02) 5 m s
c
v B (0) 7 m s
e vB 1 0.14 m s . Lo spazio percorso
vale
v (1.02) 0 m s
B
2
s trot votrot g trot
2 12 49vo2 g 6.12m .
L'energia
cinetica
iniziale
Tin m vo2 2 98 J , mentre quella finale è ovviamente diminuita a causa dello strisciamento
T fin m vc trot 2 2 I c trot 2 2 87.5 J .
+
6Studio delle forze agenti su ciascun
elemento del sistema
massa mA
m A g Td m A a
massa mB
Te Tf m B a
Td
mA
Te
mB
t
mAg
puleggia M1
equazione dei momenti
a
Td R Te R I I
R
Ma
da cui Td Te 1
2
Tf
massa mC
Th
Th m C g m C a
mC
t
Rc1
Te
P1
Td
sommando tutte le relazioni si ottiene
ag
puleggia M2
equazione dei momenti
a
Tf R Th R I I
R
M a
da cui Tf Th 2
2
mCg
Rc2
+ Tf
P1 P2
Th
mA mC
7
g 3.43 m/s2
M 1 M 2 20
mA mB mC
2
2
Facoltativo:
Td m A g a 63.7N, Te Td
t
M 1a
M a
61.1N, Tf Te m B a =44N, Th Tf 2 39.7N
2
2