Resistenza dei materiali
e
Forme strutturali per il
design
Dinamica e
vettori applicati
prof. Andrea Dall’Asta
Scuola di Architettura e Design,
Università di Camerino
e-mail:[email protected]
Cinematica
Cinematica del punto materiale
xt1 xt 2
Moto rettilineo
t xt
t1
t2
t
x
Cinematica
Cinematica del punto materiale
x
Moto rettilineo
t xt
t
Velocità
x
x
t 0 t
vt x t lim
t
v
a
Accelerazione
t
v
t 0 t
at vt xt lim
v
t
t
Cinematica
Cinematica del punto materiale
x
Moto uniforme
xt v0t
vt v0
at 0
t
Moto uniformemente accelerato
x
Moto uniforme +
1 2
xt a0t vt a0t at a 0
2
t
x
Statica
xt x0
vt 0
at 0
t
Dinamica
Dinamica del punto materiale
1. La forza è la grandezza fisica capace di modificare
la velocità di un corpo (principio)
2. Causa (forza) e effetto (accelerazione) sono
proporzionali (F=ka)
3. La costante di proporzionalità è diversa da corpo a
corpo (massa)
F t mat
Dinamica
Dinamica del
punto materiale
F t mat
altezza H=10m
accelerazione di gravità g=9.81m/s^2
espressione del moto? tempo impiegato? velocità finale?
Cinematica
Interazione
Ad ogni forza corrisponde
una forza uguale e
contraria (azione-reazione)
m1
F1 F2
F1
m2
F2
F1t F2 t
m1a1t m2a 2 t
m1v1 m2 v 2
Cinematica
Punto materiale
Corpo rigido
Assetto:
Moto:
posizione di un punto
orientamento
x
traslazione
rotazione
vt x t
velocità angolare t t
velocità
accelerazione
accelerazione ang.
a t xt
t t
t1
xt1
xt
t
t 2
xt 2
Dinamica
Dinamica del corpo rigido
1… 2… 3… (punto materiale)
1a. La forza produce una variazione di velocità angolare.
La velocità angolare non cambia solo se la forza è
applicata su un punto particolare G (baricentro)
2a. La variazione di velocità è proporzionale alla
“distanza” b della forza da G (“distanza” tra il punto e la
retta di applicazione della forza)
M Fd
3a. La costante di proporzionalità è diversa da corpo a
corpo (inerzia polare)
Ip
F ma
M G I p
F
d
G
Dinamica
Moto piano – corpo rigido
Traslazione (vettore)
t
x G t xG1 t e1 xG 2 t e 2
Rotazione (scalare)
xt
t
e2
e1
traiettoria
Dinamica
Moto piano – corpo rigido
Velocità
x
v G t x G1 t lim
t 0 t
t t
vt1
x
La velocità è un vettore
La velocità è tangente alla traiettoria
xt1
xt 2
Dinamica
Moto piano – corpo rigido
vt1
vt 2
v
Accelerazione
v
t 0 t
a G t v G1 t lim
t t
L’accelerazione è un vettore
L’accelerazione può derivare da una variazione del modulo della
velocità o da una variazione dell’orientamento della velocità
Dinamica
Moto piano – corpo rigido
vt1
vt 2
v
L’accelerazione è un vettore
L’accelerazione può derivare da una variazione del modulo della
velocità o da una variazione dell’orientamento della velocità
Statica
Dinamica – corpo rigido, moto piano
Le condizioni di equilibrio sono analoghe a quelle del moto
rettilineo, questa volta il vettore e l’accelerazione sono vettori
Ft mat
M G t I p t
Nel caso di più forze gli effetti si sommano
i Fi t mat
M t I t
i
Gi
p
Risultante
Momento risultante
R i Fi t
M GR i M Gi t
Statica
Statica
All’istante
t0
il corpo occupa la posizione
x0 , 0
si trova in quiete (velocità nulle)
v 0 0, 0 0
Statica: il corpo non cambia posizione nel tempo (le
accelerazioni sono nulle)
at 0
t 0
Ft 0
M G t 0
Dinamica
Esempio 1
barca a vela
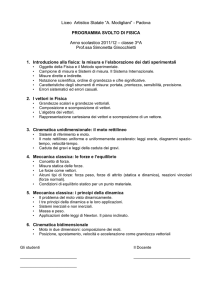
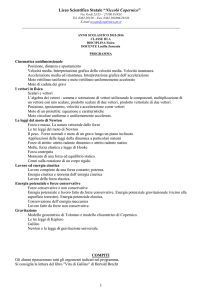
Dinamica
Esempio 1 - barca a vela
1. A cosa serve la vela?
mvin
Spinta
sulla vela
Azione sulla
corrente
mv mat
mvout
Dinamica
Kite
Kite-surf
Kite-gen
Dinamica
Esempio 1 - barca a vela
2. Perché le barche vanno contro vento?
(equilibrio traslazione sul piano orizzontale)
F1,l
F1
F1,t
R
Cinematica (vincolo)
Dinamica
F1,l ma
F1,t R 0
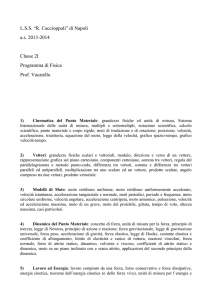
Dinamica
Esempio 1 - barca a vela
3. Perché 2 vele?
(equilibrio rotazione sul piano orizzontale)
F1
F1
b1
G
M G F1b1 I p
G
F2
b1
b2
M G F1b1 F2b2 0
Dinamica
Esempio 1 - barca a vela
4. Perché le barche non si “ribaltano”?
(equilibrio sul piano verticale)
F1,t
F1,t
b1
b1
Fidro
R
P
Fidro P 0
MG 0
F1,t R 0
Fidro P 0
M G F1b1 I p
b2
F1,t R 0
Fidro P 0
M G F1b1 F2b2 0
Vettori applicati
Vettori applicati
P
Def.
Coppia di vettori
F
(OP, F) U V
OP= grandezza vettoriale posizione,
F= grandezza vettoriale (es. forza)
O
F2
+
F1
relazione di equivalenza (cursori)
(OP1 , F1 ) (OP2 , F2 ) F1 F2 e P1 P2 F1 P1 P2 F2 0
Vettori applicati
Vettori applicati
Def. Momento rispetto al punto O
M 0 OP F
F
P
b
Def. Braccio di v rispetto al punto O
b OP OP e v e v
M0 b F
O
F2
F1
b
Oss. Due vettori applicati equivalenti
producono lo stesso momento rispetto a
qualunque punto
O
Vettori applicati
Somma di vettori applicati
Costruzione grafica
Definiamo la somma in modo che il vettore applicato
“somma” produca gli stessi effetti sul moto (stessa
r
risultante e stesso momento) dei due vettori applicate
“addendi”
OP1 , F1 OP2 , F2 OQ, R
Q
dove
Risultante
F2
F1
R F1 F2
f1
Retta di applicazione r per il punto
Q tale che
Q : OQ R OP1 F1 OP2 F2 M O
R
P2
f2
P1
Vettori applicati
Coppie – vettori con risultante nulla
Coppie
(F1 F2 , F1 F2 0)
R0
M O OP1 F1 OP2 F2 OP1 F1 OP1 F2 P1 P2 F2
P1 P2 F2
f2
(il momento non dipende da O)
F1
P2
M O b F1
b
P1
F2
f1
Vettori applicati
Esempi
P
d1
30 cm
d2
P=20N
d
F1 ?
F2 ?
B
1.20 m
MB ?
Vettori applicati
Sistemi vettori applicati
F1
S OPi , Fi , i 1..N
P1
f1
P3
Risultante
F3
P2
F2
R i Fi
f2
f3
Momento risultante
M OR i OPi Fi
Equivalenza
S1 S 2 R1 R 2 , O : M OR1 M OR 2 M QR1 M QR 2Q
Vedi dopo…
Vettori applicati
Proprietà sistemi vettori applicati
P1. Sia nota risultante e momento risultante rispetto ad O di un sistema di vettori
applicati. Il momento risultante rispetto a qualunque altro punto può essere
determinato con la seguente espressione
M QR QO R M OR
Dim.
M QR i QPi Fi i QO Fi OPi Fi QO i Fi OPi Fi
Caso particolare (coppia)
se R 0 M OR M QR O, Q
Vettori applicati
Equazioni della statica
p
R i Fi 0
P
M i GPi Fi 0
R
G
M
f
R
O
Fv
0O
r
R
Reazioni di contatto
Reazione normale di contatto
Direzione: normale al piano
Verso: orientata in direzione dell’altro corpo
Intensità: quanto serve per l’equilibrio
Reazioni di contatto
Reazione normale di contatto
Basamento: dimensioni 300mmx300mmx800mm, peso specifico =28 kN/mc (b1=150mm)
Posizione lampada: b2=1.8m
Peso lampada: P2=60N
Trovare posizione della reazione R
R
Attrito
Reazione di attrito
Direzione
Fa N 0
Intensità
Fa N
Inclinazione 30°
Coeff. attrito =0.03
a=?
x e v dopo 5s?
Fa
N
Attrito
Reazione di attrito
Fa N Fa N 0
Attrito
Collegamenti ad attrito controllato
Attrito
Parentesi
Achille Castiglioni, Pio Manzù (1970)
Attrito
Parentesi
Filo+peso
Deviazione
4 punti
Sistema di forze equilibrato
R0
Mo 0
Attrito
Parentesi
Deviazione
Deviatore
azione-reazione
(equilibrate)
Attrito
equilibrio verticale e
posizionamento
Fa N
Fa N 0
Forza d’attrito dipende dal peso in basso e dal coefficiente di attrito dei due materiali
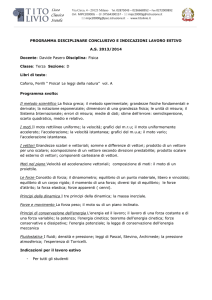
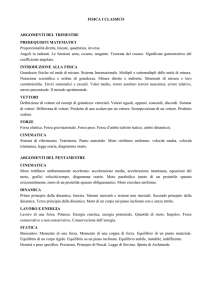
Stabilità
Stabilità (risposta ad una perturbazione)
Peso proprio sempre presente, stabilizzante
Disturbo: forza orizzontale imprevista
Situazione limite per attrito o ribaltamento
Ruolo geometria (altezza/base)
H
h
Fa
N
Ribaltamento
(R esterno alla base)
Fa
H
N
Scorrimento
(H maggiore dell’attrito)
b
Geometria
Influenza della posizione e
della dimensione della base
Stabilità
Stabilità
Bicchieri
Peso
Geometria-base
Geometria-altezza
Stabilità
Stabilità
Bicchieri - peso
Equilibrio
Esempio
Espositore