Projet BEACHMED – Phase C
Attività 1: Fabbiso-gni di sabbia per la ricostruzione e la-manutenzione dei li-torali
Metodi di acquisizione dei dati della linea di riva
RILIEVO CON METODICHE FOTOGRAMMETRICHE MONOSCOPICHE PER IL RADDRIZZAMENTO IN BLOCCO DI PRESE AEREE
DIGITALI
Il “raddrizzamento” fotogrammetrico è una operazione che potrebbe essere più propriamente chiamata “deprospettivizzazione” del fotogramma; infatti una immagine fotografica, prescindendo dalle eventuali distorsioni
dell’obiettivo e dalle deformazioni della pellicola, può essere considerata una prospettiva centrale, dove il “punto di vista”
è costituito dal cosiddetto “centro” dell’obiettivo.
Se l’oggetto rappresentato (o una sua porzione considerata) è assimilabile a una superficie piana, è possibile la
trasformazione dell’immagine prospettica nella corrispondente proiezione ortogonale dell’oggetto in questione. La
Geometria proiettiva infatti fornisce gli strumenti (omologie) che consentono a un programma di realizzare il
ricampionamento dell’immagine digitale in modo da ottenere il cosiddetto “raddrizzamento”.
La metricità dei risultati è comunque subordinata ai presupposti indicati:
• assenza delle distorsioni dell’obiettivo o loro correzione efficace,
• conoscenza dei parametri di orientamento interno della camera da presa,
• planarità della pellicola o del CCD che capta la matrice digitale,
• planarità della superficie rappresentata.
Evidentemente le prime tre condizioni possono essere sufficientemente rispettate solo ricorrendo ad apparecchi
cosiddetti “metrici”, mentre, come abbiamo visto al paragrafo precedente, le camere semi-metriche, dotate di
caratteristiche alquanto variabili da modello a modello, solo con una certa difficoltà riescono a fornire risultati
paragonabili a quelli che si possono conseguire con attrezzature fotogrammetriche. Per quanto riguarda le camere
amatoriali o le scansioni di immagini parziali, acquisite con telecamere o altri apparecchi a basso costo relativo, si
devono considerare i risultati a forte rischio di errore; ciò non significa l’impossibilità del loro impiego, che anzi si sta
diffondendo, ma la necessità di un approccio critico e di un monitoraggio severo dei risultati, mediante l’inserimento di un
numero adeguato di punti di controllo (GCP) riconoscibili sull’immagine e determinati in posizione, in modo da poter
avere un riscontro oggettivo delle approssimazioni che si sono conseguite. Un altro campo di impiego di queste
immagini è quello della “integrazione” del rilievo metrico: cioè dell’uso di immagini non metriche (o di porzioni di esse) ad
alta risoluzione georiferite utilizzando i punti “omologhi” riconoscibili in immagini metriche a risoluzione più bassa. Si può
così ottenere un incremento delle informazioni visive e un sostanziale accordo (da verificare in base a quanto sopra
riportato) con la metricità predeterminata. Soprattutto per le spiagge, dove non siano presenti opere edificate o ingombri
tali da determinare lacune, che hanno una forma relativamente regolare questa integrazione può risultare economicamte
vantaggiosa e tecnicamente possibile, anche per eventuali aggiornamenti (si pensi ad evoluzioni della linea di riva
monitorate con prese ripetute). Per queste ragioni si è decisa una sperimentazione diretta nell’area di prova.
In letteratura di hanno diversi riferimenti ad esperienze, soprattutto nella integrazione dei rilievi per immagini
con determinazioni puntuali di posizione mediante misure GPS. Oltre al già citato lavoro di Caprioli (2002) si hanno
conferme da Livingstone (1998) che opera con diversi sensori (pancromatici e multispettrali) dotati di buona risoluzione
(1pxl = 15 cm circa) aerotrasportati cercando di determinare (con GPS a bordo) la posizione del centro di presa; si
riportano precisioni non molto elevate (nell’ordine del metro) ottenute con GCP determinati a terra mediante GPS con
solo codice, ma in numero abbastanza elevato (6-8 markers per immagine).
Una ulteriore proposta, avanzata da Tao (2001) e ripresa da Cina (2004) riguarda i metodi semplificati, basati
su un numero elevato di GCP (>39 per fotogramma) e in grado di fornire un georiferimento mediante rapporti polinomiali
finalizzati alla costruzione di una relazione tra punti immagine e punti a terra (Rational Function Model)
indipendentemente dalla conoscenza dei requisiti metrici del sensore, quindi particolarmente adatta alla elaborazione di
immagini da satellite o di loro porzioni.
Un caso a parte può essere considerato quello dell’analisi di immagini ripetute dello stesso oggetto, dallo
stesso punto di vista, ma in tempi diversi, come ad esempio le immagini captate da telecamere fisse posizionate su
litorali in erosione o ripascimento.
www.beachmed.it
- 56 -
Projet BEACHMED – Phase C
Attività 1: Fabbiso-gni di sabbia per la ricostruzione e la-manutenzione dei li-torali
RESTITUZIONE MONOSCOPICA DELLA LINEA DI RIVA DA PRESE PANORAMICHE
Per la valutazione della possibilità di utilizzare singoli fotogrammi per la restituzione della linea di costa sono
state valutate due possibili strategie i cui risultati sono stati comparati sulla base delle restituzioni stereoscopiche già
eseguite e sulle determinazioni dei markers a terra effettuate per “attrezzare” le riprese.
I metodi approssimativi che volevamo identificare naturalmente dovevano soddisfare al requisito di essere
facilmente eseguibili ed avere delle accuratezze compatibili con lo scopo di identificare la linea di costa. Come già
affermato in precedenza questa operazione è ad elevato rischio di errore, infatti le proprietà metriche delle immagini
sono fortemente deteriorate dai fenomeni distorsivi dell’obiettivo, non compensati dalla applicazione dei dati riportati nel
certificato di calibrazione (come invece avviene nella restituzione stereoscopica). Un secondo limite alla precisione che
si può ottenere con il georiferimento di immagini dipende dalla approssimazione indotta nel ritenere i GCP complanari (il
software impiegato non considera la quota dei markers); tale approssimazione apparentemente lecita per una spiaggia,
porta invece, come più avanti evidenziato, a disomogeneità negli scarti calcolati sui punti di controllo e a una relativa
imprecisione proprio sulla linea di riva, situata ovviamente a una quota diversa da quella dei markers impiegati.
Immagine circa nadirale del Gombo captata da una quota volo di circa 2000 Ft (650 m) utilizzata per la restituzione
monoscopica della linea di riva 1 pixel (riportato sul terreno equivale a circa 7 cm
La prima strategia ha trattato i singoli fotogrammi mediante un processo di georiferimento delle immagini
usando alcune delle mire rilevate come punti di controllo a terra (GCP).
Il georiferimento è stato eseguito con l’ausilio del software Erdas Image impostando un modello geometrico per
la rettifica dell’immagine di tipo polinomiale di secondo ordine, computando 14 mire come “punti doppi” per il calcolo
dell’ortorettifica. Sulle mire impiegate si sono avuti errori dell’ordine del decimetro, mentre sugli altri punti (utilizzati per
controllo) gli scarti sono risultati pressoché uniformi e superiori di un ordine di grandezza.
www.beachmed.it
- 57 -
Projet BEACHMED – Phase C
Attività 1: Fabbiso-gni di sabbia per la ricostruzione e la-manutenzione dei li-torali
Schermata del software Erdas con i parametri di precisione ottenuti nel georiferimento polinomiale di secondo grado
basato su 14 GCP (Gombo)
La seconda metodologia si è basata su un semplice raddrizzamento fotogrammetrico introducendo un errore
dovuto all’approssimazione della superficie della costa ad un piano orizzontale. Si sono scelte di conseguenza 8 mire
all’interno dei singoli fotogrammi che avessero differenze di quota modeste e si sono esegutiti 2 “raddrizzamenti” in
blocco mediante il programma Archis della
Siscam e mediante il già citato Erdas. Nel primo
caso gli scarti sulle mire utilizzate come punti di
controllo sono stati dell’ordine del centimetro
mentre gli scarti sul confronto eseguito sulle
restanti mire hanno evidenziato un andamento
disomogeneo a seconda della quota della mira
considerata, talvolta gli scarti sono risultati
superiori ai 2 metri.
Il passo successivo per la determinazione
della applicabilità e della precisione conseguita
con i due metodi già esposti è stato il confronto tra
le linee di riva identificate con le due metodologie
dal medesimo fotogramma e poi la loro verifica
rispetto alla medesima linea di ottenuta mediante
stereorestituzione digitale.
Il confronto con i dati ottenuti dalla
stereorestituzione mostra che il metodo del
raddrizzamento in blocco per trasformazione affine
risulta quello più accurato. La sovrapposizione
delle due linee di costa ottenute con i due metodi
citati, ha presentano andamenti diversi con uno
scarto massimo di circa 1,5 m.
Come accennato, una ulteriore prova è Schermata di “Archis” con i risultati della precisione ottenuta nel
stata effettuata mediante il raddrizzamento affine raddrizzamento in blocco (trasformazione affine) e nel riferimento
della stessa immagine circa nadirale con il geometrico dell’immagine del Gombo
programma ERDAS, ma utilizzando una
trasformazione omologica piana e con un minore numero di punti di controllo (6 anziché 14). I risultati ottenuti sono di
qualità metricamente inferiore a quelli esposti in precedenza, ma la distribuzione degli errori sugli altri punti noti è
risultata più omogenea, quindi i risultati sono globalmente comparabili.
www.beachmed.it
- 58 -
Projet BEACHMED – Phase C
Attività 1: Fabbiso-gni di sabbia per la ricostruzione e la-manutenzione dei li-torali
Mediamente la posizione dei punti di controllo determinata graficamente ha uno scarto di circa 1m rispetto alle
determinazioni GPS, valore un po’ alto, ma sufficiente per una valutazione approssimata della posizione della linea di
riva.
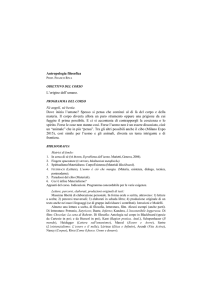
Particolare del confronto tra le immagini del Gombo ottenute per georiferimento polinomiale (immagine sinistra ) e
raddrizzamento (immagine destra). La linea di riva blu è ottenuta con il metodo di raddrizzamento (trasformazione affine), la
magenta alla trasformazione polinomiale, la nera alla restituzione stereofotogrammetrica digitale
www.beachmed.it
- 59 -
Projet BEACHMED – Phase C
Attività 1: Fabbiso-gni di sabbia per la ricostruzione e la-manutenzione dei li-torali
Raddrizzamento su superficie piana e georiferimento dell’immagine digitale mediante il programma ERDAS
Si sono inoltre comparati i risultati ottenuti nel
raddrizzamento, sia con la restituzione stereoscopica che con un
rilievo schematico della linea di riva effettuato con metodo GPS, ma
circa 2 giorni prima della ripresa. Come si vede l’andamento della
linea restituita per ricalco a monitor (verde) rispetto a quella GPS
(rossa) e a quella della restituzione stereoscopica (blu) non
differiscono molto. Parte della differenza è dovuta al fatto che per la
restituzione stereoscopica si sono impiegate immagini diverse da
quella impiegata per il georiferimento, quindi la posizione delle onde
rispetto alla riva risulta diversa, inoltre il restitutista ha collimato la
linea di cambio di colore della sabbia (livello massimo bagnato)
quindi si è tenuto a una quota media più elevata dell’operatore GPS
(da 47.2 m circa a 46.5 m in altezza ellissoidica).
Inoltre, per quanto riguarda il rilievo GPS, come già detto,
questo è stato effettuato un paio di giorni prima della ripresa, quindi
le differenze sono ancora più giustificate. Con tutto ciò gli scarti
massimi sono nell’ordine di 1-2 metri, per cui, nell’ambito della
precisione dichiarata, si possono ritenere accettabili.
Un altro aspetto da affrontare è una corretta digitalizzazione
della linea di riva sulle immagini e il suo corretto riconoscimento da
parte degli operatori. In Figura è riportato un esempio di tracciamento
da parte di alcuni operatori, confrontato con la linea di riva rilevata
con GPS (linea blu). Si nota come esistano notevoli differenze di
interpret
azione
che
Confronto fra la linea di riva GPS (rosso),
posson raddrizzamento dell’immagine (verde) e restituzione
o
stereoscopica (blu)
portare
ad errori di diversi metri.
Il risultato ottenuto mostra i limiti prevedibili dovuti
alle approssimazioni introdotte nel procedimento di
restituzione, comunque, trattandosi di un metodo a basso
costo relativo, si possono considerare i vantaggi offerti
assieme alla valutazione della precisione conseguita.
Per quanto riguarda i metodi per il raddrizzamento,
emerge che per le spiagge il metodo più idoneo è quello
della omologia piana (trasformazione affine), mentre le
precisioni riportate nei procedimenti basati su
ricampionamenti con funzioni polinomiali di grado superiore
al primo non trovano poi riscontro se non nelle immediate
vicinanze dei punti di calcolo.
Confronto fra le linee di riva digitalizzate da diversi operatori su
Dal raffronto con la indagine stereoscopica, si
di un’ortofoto digitale e quella rilevata con GPS (in blu) sulla possono quantificare differenze nell’ordine di 1-2 metri, con
spiaggia del Gombo
“punte” anche significativamente superiori.
www.beachmed.it
- 60 -
Projet BEACHMED – Phase C
Attività 1: Fabbiso-gni di sabbia per la ricostruzione e la-manutenzione dei li-torali
RILIEVO CON METODICHE FOTOGRAMMETRICHE MONOSCOPICHE PER IL RADDRIZZAMENTO (DIFFERENZIALE SU DEM) DI
RIPRESE AEREE DIGITALI
Il procedimento più corretto per la metricizzazione di immagini è basato su un raddrizzamento differenziale
basato su un DEM noto che descrive la forma dell’oggetto rappresentato e consente in tale modo la
deprospettivizzazione dell’immagine, trasformandola, almeno in via teorica, in una rappresentazione in proiezione
ortogonale.
Naturalmente la bontà del risultato dipende essenzialmente dai seguenti fattori principali:
• risoluzione dell’immagine digitale – rapporto pixel/terreno,
• qualità metriche dell’immagine - assenza (o conoscenza) delle distorsioni dell’obiettivo e del supporto – nel caso di
immagini ottenute per scansione: metricità e/o calibrazione dello scanner,
• conoscenza accurata dei parametri di orientamento interno dell’immagine – disponibilità e accuratezza dei dati riportati
nel certificato di calibrazione,
• determinazione (o conoscenza) della posizione del centro di presa relativamente all’oggetto – orientamento assoluto
nel caso di fotogrammetria diretta (con sistemi GPS-INS) o numero adeguato di punti di controllo a terra per quella
indiretta,
• definizione e precisione del DEM - lato della maglia e precisione sulle quote dei nodi (la maglia può variare da 2 a 10
mm nella scala di restituzione dell’ortofoto),
• morfologia del DEM (assenza di linee di frattura o di bruschi cambi di pendenza),
• assenza di “scoperture” dovute ad aggetti o a zone d’ombra – solitamente si impiega la parte “centrale” del
fotogramma (in dipendenza anche dall’angolo di apertura dell’obiettivo).
In letteratura si trovano scarsi riferimenti ad esperienze condotte recentemente, tanto più che ci sono diversi
software commerciali o programmi elaborati da ditte specializzate che operano il ricampionamento e il georiferimento
delle immagini su DEM (ERDAS per citarne uno tra i più noti). Solo per casi particolari (Dequal, 2001) si ricorre ad
elaborazioni più sofisticate. La tecnica di raddrizzamento differenziale inoltre si sta sviluppando in modo decisivo grazie
alla possibilità di ottenere DEM tramite interferometria Radar o mediante scansione laser (Banchini, 1999).
Inoltre, per rilievi a scala più ridotta si possono utilizzare le immagini da satellite (i
nuovi sensori consentono risoluzioni submetriche) impiegando la cartografia numerica
(carte tecniche regionali) per la generazione di un DEM di riferimento (Fiani, 2000).
Per il progetto BEACHMED, nell’ambito dei rilievi integrati condotti il 22-24/01/04
nella zona del Gombo, si sono acquisite immagini con diversi sensori, tra i quali una
camera digitale.
Il volo è stato eseguito con un con un aereo Partenavia P68 secondo un preciso
piano di volo.
La camera digitale utilizzata per produrre le ortofoto è una camera metrica Rollei
6008-DB44. con risoluzione di 4048x4048 pixel. Sono state prodotte ortofoto digitali
(ortoimmagini) aventi risoluzione spaziale XY pari a 0.2 m. Per avere una conferma della
metricità delle ortoimmagini, si è anche in questo caso effettuato il raffronto con il rilievo
GPS, eseguito però alcuni giorni prima della ripresa fotografica. La sovrapposizione delle
immagini raster e vettoriali è stata eseguita con il software Arcview e, avendo utilizzato il
medesimo datum per l’orientamento assoluto dei rilievi, non è stato necessario operare
alcuna correzione, né di scala, né di roto-traslazione.
Piano di volo delle riprese
effettuate il 22/01/2004 sulla
costa pisana
www.beachmed.it
- 61 -
Projet BEACHMED – Phase C
Attività 1: Fabbiso-gni di sabbia per la ricostruzione e la-manutenzione dei li-torali
Si è poi ripassata a monitorare la linea di riva
desunta dall’ortoimmagine e il raffronto con il rilievo
GPS (in colore rosso) ha dato risultati molto buoni nella
parte settentrionale della zona di interesse, mentre nella
zona concava a meridionale gli scostamenti arrivano a
circa 3 m.
Il buon risultato complessivo era prevedibile,
trattandosi di un impiego delle tecniche
fotogrammetriche più rigoroso di quello riportato nel
paragrafo precedente, mentre le differenze possono
essere attribuite in gran parte a una diversa
interpretazione della linea di riva da parte dell’operatore
del rilievo GPS e ancora di più alle diverse condizioni
Particolare di un’ortoimmagine (Tirrenia), la dimensione
climatiche tra il giorno della ripresa digitale e quello del
del pixel a terra è di circa 0.2x0.2 m
rilievo. A riprova di quanto affermato, la massima
differenza si ha nella zona in cui la battigia ha minima pendenza.
Anche le attrezzature impiegate per la ripresa sono alquanto differenti, nel caso riportato nei 2 paragrafi
precedenti, si è impiegata una camera digitale di bassa precisione relativa, anche se dotata di certificato di calibrazione,
nel caso presente invece la camera è semi-metrica, con risoluzione complessiva circa tripla dell’altra, inoltre la quota di
volo era più elevata e al direzione di presa più vicina al nadir (l’aeromobile era attrezzato con una botola), con una
conseguente limitazione delle deformazioni prospettiche.
Infine il procedimento di ortoproiezione è stato basato su un DEM di lato 1m rilevato con LIDAR, quindi su una
superficie del terreno quasi perfettamente definita – abbiamo visto che le precisioni plano-altimetriche del rilievo arrivano
al decimetro.
Per quanto riguarda le immagini ottenute con il sensore multispettrale CASI, la risoluzione non è risultata
paragonabile a quella delle immagini fotografiche, per cui, non dovendo individuare tematismi particolari, non sono state
impiegate nel presente studio; potrebbero però rivelarsi di grande interesse per lo studio dell’inquinamento delle acque o
per la definizione delle diverse vegetazioni che si trovano nell’area.
In conclusione si può rilevare
che il metodo applicato dà risultati di
elevata precisione, ma non può essere
utilizzato se non si dispone di un DEM del
terreno, per cui si configura più adatto a
rilievi ripetuti (monitoraggio) basati su uno
studio completo della geometria della
spiaggia, oppure alla estrazione del
tematismo della linea di riva nell’ambito di
un rilievo geometrico completo.
Riportiamo di seguito le
indicazioni di massima per un
monitoraggio
tramite
rilievo
fotogrammetrico di zone estese di litorali
finalizzato al estrazione della linea di riva Raffronto al Gombo tra la linea di riva rilevata con GPS (rosso) e quella identificata
e alla sua evoluzione nel tempo con sulla ortoimmagine (verde), lo spessore delle linee è 0.5 m sul terreno
precisione richiesta ±2 m (s.q.m.). A titolo
di esempio si riportano i dati relativi ad un rilievo di 100 km di spiaggia.
Punti di appoggio (solo per il primo rilievo):
• precisione richiesta ±1 m in planimetria ±0.2-0.5 m in quota,
• numero minimo punti 200 (fino a 1000),
• i punti si possono identificare su CTR 1:5000 (o sup.) per tutte le zone antropizzate o dove siano presenti opere di
www.beachmed.it
- 62 -
Projet BEACHMED – Phase C
Attività 1: Fabbiso-gni di sabbia per la ricostruzione e la-manutenzione dei li-torali
difesa artificiali e/o manufatti riconoscibili,
• sono indispensabili 1-2 punti/km, si possono utilizzare fino a 10-15 punti/km,
• dove non si possono rinvenire punti stabili si deve procedere alla materializzazione (duratura nel tempo e quindi
accurata) di “marker” artificiali stabili di dimensioni adeguate (almeno 1x1m) e facilmente visibili,
• gli eventuali “marker” artificiali devono essere georiferiti mediante rilievo GPS (anche di modesta precisione ±1 m),
• per tutti i punti impiegati si devono redigere monografie (GIS dei GCP) e procedere alla ricognizione sulla base di un
rilievo fotografico aereo speditivo preliminare.
Attrezzature di presa:
• aeromobile o elicottero con possibilità di effettuare riprese nadirali (basta una piccola botola), sul quale sia installata
una piccola antenna GPS (navigazionale) e che consenta, oltre al pilota, la presenza di 2-3 operatori (navigatore –
GPS, operatore riprese digitali , eventuale operatore su PC portatile per coordinare la acquisizione dei dati),
• camera digitale semi-metrica con matrice minima di 4000x4000 pxl, dotata di certificato di calibrazione in grado di
attenuare le distorsioni dell’obiettivo (normal angolare).
Progettazione della presa digitale:
• scala di acquisizione 1pxl = 20-25 cm sul terreno (abbracciamento 800-1000 m),
• sovrapposizione longitudinale 60% - base 320-400 m.
Condizioni per la presa:
• altezza d’onda al largo inferiore a 0.2 m,
• vento di velocità inferiore ai 10 km/h,
• condizioni di marea note,
• buona visibilità atmosferica e angolo di altezza del sole superiore ai 30°.
Elaborazione fotogrammetrica digitale (solo per il primo rilievo):
• realizzazione di una triangolazione fotogrammetrica basata sui punti di controllo a terra e su altri punti di legame
riconoscibili sui fotogrammi,
• elaborazione (possibilmente automatica) di un DEM con maglia 2x2 m circoscritto alla zona di interesse (spiaggia),
• revisione del DEM automatico per la eliminazione degli “outliers” significativi e per la suturazione di eventuali lacune
(anche per interpolazione),
• ortoproiezione delle immagini su DEM,
• elaborazione della linea di riva.
Riprese successive (come sopra per la ripresa, la elaborazione consiste solo nelle ultime 2 fasi):
• ortoproiezione delle immagini sul DEM già elaborato,
• elaborazione della linea di riva,
• eventuale ri-elaborazione parziale del DEM nelle zone più vistosamente mutate o dove si voglia una particolare
accuratezza,
• eventuale aggiornamento del GIS dei GCP per registrare eventuali mutamenti.
IMMAGINI DA SATELLITE
Il telerilevamento ha dimostrato di essere un sistema affidabile e con un favorevole rapporto costi/benefici per
l’analisi territoriale a media e piccola scala. Fino a pochi anni addietro la risoluzione dei sensori posizionati su
piattaforme spaziali produceva immagini con dimensioni dei pixel al suolo di 30 m (Landsat), 20 m (SPOT multispettrale)
e 10 m (SPOT Pancromatico), non sufficienti per il posizionamento della linea di riva o delle opere di difesa.
La messa in orbita di sensori ad alta risoluzione Ikonos (4 m multispettrale ed 1 m pancromatico) e Quickbird
(2,4 m multispettrale e 0,61 m pancromatico) ha aperto nuove prospettive in questo campo, anche se non sono stati
effettuati sufficienti studi per la validazione dei dati. Nell’ambito del Progetto BEACHMED sono state acquisite le
immagini Quickbird II dell’intera costa bassa della Toscana per un totale di circa 300 Km di costa. Le immagini ci sono
www.beachmed.it
- 63 -
Projet BEACHMED – Phase C
Attività 1: Fabbiso-gni di sabbia per la ricostruzione e la-manutenzione dei li-torali
state fornite nell’arco di quattro mesi per cui non è stato possibile avere una copertura coeva della Regione. Durante il
progetto sono state analizzate le immagini mediante il confronto fra linee di riva ottenute sia con fotointerpretazione delle
stesse che con tecniche di riconoscimento automatico e linee ottenute con misure GPS condotte in contemporanea o
poche ore dopo l’acquisizione del dato telerilevato.
Per la digitalizzazione della linea di riva si è reso necessario avere una georeferenziazione, il più precisa
possibile, delle immagini satellitari, dato che quelle fornite risultano originariamente traslate di diverse decine di metri.
Si è verificato che una semplice traslazione dell’immagine ed una leggera rotazione di 0.1° (dovuta
probabilmente al cambiamento di sistema di riferimento) si dimostrano sufficienti per ottenere la precisione richiesta.
L’immagine così trattata risulta la più precisa possibile con errori, rispetto ad una linea di riva rilevata con GPS, inferiori
al metro.
Si è provveduto comunque ad effettuare una ulteriore georerferenziazione in tre modi diversi per vedere il grado
di precisione ed il tempo necessario alla stessa. Per fare ciò si è deciso di utilizzare il software della Research Systems,
Envi v.4.0.
La prima, e più veloce, è stata effettuata per mezzo
di 5 punti presi dalla Carta Tecnica Regionale vettoriale della
Regione Toscana e posti in prossimità della linea di riva, in
modo da avere un grado di distorsione minimo proprio in
prossimità di quest’ultima.
Per il warping dell’immagine è stata utilizzata la
trasformazione polinomiale di 1° grado, l’unica possibile con
un così ridotto numero di punti.
Ogni volta, poi, che su un immagine viene applicata
una trasformazione geometrica per rettificarla, il risultato è
che i pixel si trovano in una nuova posizione, più accurata,
ma la cui radiometria può non rappresentare i valori reali
misurati sulla scena. Una stima dei nuovi valori di radianza e
quindi dei nuovi numeri digitali dei pixel viene fatta mediante
delle procedure di interpolazione matematica che sono dette
Particolare di una immagine Quickbird II di Marina di Pisa tecniche di ricampionamento (Gomarasca, 1997). Gli
traslata e confrontata con linea di riva GPS (viola) e con la algoritmi di ricampionamento più diffusi sono tre: Nearest
topografia della CTR vettoriale (rosso), l’errore risulta neighbor (prossimo più vicino), Bilinear (bilineare) o Cubic
inferiore al metro
(cubico). Nel nostro caso si è deciso di utilizzare il
ricampionamento nearest neighbor in quanto è quello che non modifica i valori digitali. Questo perché associa il valore
del pixel dell’immagine “deformata” a quello più vicino dell’immagine di partenza. Gli altri due, invece, associano al pixel
“deformato” la media dei 4 pixel adiacenti (bilinear) o dei 16 pixel adiacenti (cubic), modificando il valore dello stesso.
Abbiamo scelto di operare in un tale modo in quanto, volendo rilevare il confine terra-mare, abbiamo reputato opportuno
che i valori dei pixel non fossero modificati.
La seconda georeferenziazione è stata effettuata per mezzo di 34 punti presi, come prima, dalla CTR vettoriale
della Regione Toscana, distribuiti in modo uniforme su tutta l’immagine.
Questa volta è stato possibile effettuare la georeferenziazione utilizzando le trasformazioni polinomiali di 1°, 2°
e 3° ordine.
Si è deciso poi di utilizzare la polinomiale di 1° ordine dato che, sebbene la georeferenziazione abbia un errore
medio minore per le trasformazioni di ordine superiore, con esse si ottiene anche una distorsione maggiore nelle zone
lontane dai CGP (punti di controllo) con i quali si è effettuato il warping dell’immagine. Essendo difficile trovare punti di
controllo nella zona in prossimità della riva, ed in particolare in mare, le immagini georiferite con polinomiali di 2° e 3°
ordine erano più precise nelle zone intensamente urbanizzate, dove maggiori erano i punti di controllo, e meno proprio
dove volevamo avere il massimo grado di precisione. Anche in questo caso si è optato per il ricampionamento nearest
neighbor.
La terza georeferenziazione è stata effettuata mediante 6 punti di controllo rilevati per mezzo di un rilievo GPS
di tipo cinematico con una precisione di circa 30 cm. Come negli altri due metodi si è optato per il ricampionamento
nearest neighbor.
www.beachmed.it
- 64 -
Projet BEACHMED – Phase C
Attività 1: Fabbiso-gni di sabbia per la ricostruzione e la-manutenzione dei li-torali
migliore.
A questo punto si è effettuato il confronto tra le tre immagini così georiferite per vedere quale delle tre fosse la
Per fare questo si è ancora una volta confrontato le immagini con
la linea di riva acquisita tramite GPS.
I risultati mostrano un errore rispettivamente di:
• 3 m con CTR con 34 punti,
• 2 m con CTR con 5 punti,
• 4 m con GCP con 6 punti.
Sono comunque risultati tutti peggiori della semplice operazione
di rototraslazione effettuata inizialmente.
La scelta di operare con solo 6 punti rilevati col GPS è stata
dettata dal fatto che il rilievo in automatico della linea di riva è
economicamente vantaggioso se si riesce ad operare con tempi minori di
quelli necessari al rilievo celerimetrico o al rilievo con il GPS cinematico.
Per effettuare la registrazione di un punto di controllo GPS, tenendo conto
anche della mobilizzazione, sono infatti, necessari circa 30 minuti sul
posto, che vanno sommati ai tempi di elaborazione. L’acquisizione di un
elevato numero di GCP può richiedere quindi più tempo del rilievo stesso
della linea di riva con GPS e non sempre i punti di controllo rilevati per la
georeferenziazione di una immagine sono utilizzabili per altre immagini.
Una volta georeferenziata l’immagine è necessario estrarre la
linea di riva, cosa che può essere fatta sia con i tradizionali metodi della
fotointerpretazione che con quelli classici dell’image processing. In questa
parte del Progetto è stata sviluppata e testata una procedura per
l’estrazione automatica della linea di riva da un’immagine telerilevata che
viene descritta in modo schematico:
1. Georeferenziazione dell’immagine.
2. Density slicing per la separazione terra/mare (sia sulle immagini
multispettrali che su quella pancromatica.
3. Applicazione di un filtro digitale passa alto per il tracciamento
della linea di riva.
4. Esportazione dell’immagine raster della linea di riva e sua
vettorializzazione in Autocad.
5. Traslazione del vettore di 0,5 pixel per posizionarlo nel punto di
contatto fra i pixel di terra e quelli di acqua (si ottiene così la
linea di riva del momento dell’acquisizione.
6. Traslazione della linea di riva in funzione della marea e della
pressione atmosferica nel momento dell’acquisizione e della
pendenza media della battigia ottenuta da misure dirette e
considerata invariabile.
Immagine QuickBird
georeferenziata con 6
GCP rilevati con GPS
Il confronto della linea di riva così ottenuta con quella rilevata direttamente sulla spiaggia con GPS indica che il
sistema, quale quello da noi adottato, comporta un errore medio di 1-2 pixel, cosa accettabile solo nell’ambito di un
monitoraggio di lungo termine in litorali soggetti a variazioni morfologiche consistenti. Per quanto riguarda la costa
toscana, solo pochi tratti mostrano uno spostamento medio annuale della linea di riva dello stesso ordine di grandezza.
La possibilità teorica di frequenti ripetizioni della misura, dati i brevi tempi di rivisitazione dei satelliti, potrebbe
portare ad una posizione media su breve periodo di maggiore accuratezza, ma che verrebbe ad avere un costo elevato.
La frequenza di acquisizione di immagini utili è comunque assai maggiore del tempo di rivisitazione, sia per la
www.beachmed.it
- 65 -
Projet BEACHMED – Phase C
Attività 1: Fabbiso-gni di sabbia per la ricostruzione e la-manutenzione dei li-torali
presenza di copertura nuvolosa che per l’inutilità delle immagini rilevate durante eventi meteo-marini anche modesti.
Georeferenziazione con CTR con 5 punti
Immagine
Ikonos
del
georeferenziata, Banda 4 (IR)
www.beachmed.it
Georeferenziazione con CTR con 34 punti Georeferenziazione con GCP con 6 punti
15/06/2002 Immagine Ikonos del 15/06/2002 con ubicazione della
zona di studio
- 66 -
Projet BEACHMED – Phase C
Attività 1: Fabbiso-gni di sabbia per la ricostruzione e la-manutenzione dei li-torali
Density slicing in due livelli dell’Immagine Ikonos
Estrazione della linea di riva mediante filtro Sovrapposizione della linea di riva
passa alto
all’immagine Ikonos originale
Esportazione dell’immagine raster della linea di Traslazione della linea di riva in funzione della marea e della pressione
riva e sua vettorializzazione in Autocad
atmosferica nel momento dell’acquisizione e della pendenza media della battigia
Traslazione del vettore di 0,5 pixel per
posizionarlo nel punto di contatto fra i pixel di
terra e quelli di acqua
www.beachmed.it
- 67 -
Projet BEACHMED – Phase C
Attività 1: Fabbiso-gni di sabbia per la ricostruzione e la-manutenzione dei li-torali
SISTEMI VIDEO
Il monitoraggio dell’evoluzione della spiaggia può essere
effettuato con rilievi ad elevata frequenza per mezzo di telecamere
installate su punti prominenti del paesaggio o su supporti
appositamente posizionati. L’immagine acquisita è obliqua e
necessita di una operazione di ortorettificazione oltre che di una
georeferenziazione. E’ possibile acquisire immagini in continuità
per studiare la risposta della spiaggia a singoli eventi meteomarini,
oppure immagini giornaliere o con periodicità più alta per valutare
l’evoluzione su breve periodo, in genere a seguito della
realizzazione di interventi di difesa.
Dall’immagine ortorettificata e georeferenziata è possibile
estrarre la linea di riva, sia con procedure automatiche che tramite
fotointerpretazione. In entrambi i casi si devono affrontare tutte le
problematiche messe in evidenza per le foto aeree e per le Telecamera per il video monitoraggio posta nel sito di
Alassio (SV)
immagini da satellite.
Nell’ambito del Progetto BEACHMED sono state
installate due coppie di telecamere: una nella spiaggia modello di San Rossore ed una coppia sulla spiaggia di Alassio
(SV). Entrambe le telecamere acquisiscono tre immagini al giorno, una delle quali è immediatamente accessibile a
chiunque su internet (www.BEACHMED.it)
Le due telecamere di San Rossore sono posizionate su di un palo alto 8 m e posto dietro la prima duna e
guardano, in direzioni opposte, un tratto di litorale difeso da scogliere parallele. L’operatività del sistema è stata assai
ridotta dato che l’obiettivo delle telecamere viene coperto rapidamente da sale e sabbia. Le condizioni in cui opera sono
estremamente delicate poiché il tratto di costa osservato presenta una falcatura che fa variare in continuità l’angolo
formato fra l’asse dell’obiettivo e la linea di costa, fino ad avere un’osservazione ortogonale a riva. Sarà quindi possibile,
tramite il confronto con le linee di riva rilevate con GPS, valutare l’accuratezza della linea di riva in funzione dell’angolo
di osservazione.
Le due telecamere di Alassio sono posizionate in condizioni assai più favorevoli sulla terrazza posta al 5° piano
di un albergo posto sulla spiaggia. Una guarda un tratto di spiaggia nel quale è stato installato un impianto di drenaggio
della spiaggia (BMS) con lo scopo di fare espandere l’arenile, l’altra in un tratto adiacente in condizioni naturali. Sono
stati effettuati rilievi topografici della spiaggia sia per ottenere la posizione della linea di riva, da confrontare con quella
estratta dalle immagini, che la pendenza della battigia, per apportare le correzioni di marea e di pressione atmosferica.
Immagini riprese dalle telecamere di Alassio verso la spiaggia su cui è installato il sistema di drenaggio (sinistra) e su quella di
controllo (a destra)
www.beachmed.it
- 68 -
Projet BEACHMED – Phase C
Attività 1: Fabbiso-gni di sabbia per la ricostruzione e la-manutenzione dei li-torali
Immagine georeferita e ortorettificata ripresa nel tratto di litorale su cui è installato il sistema di
drenaggio con sovrapposta la linea di riva estratta per fotointerpretazione e quella rilevata con GPS.
Sono indicati anche i settori per i quali viene calcolato lo spostamento medio della linea di riva
L’elaborazione ed il confronto fra i dati mette in evidenza che in condizioni di mare calmo il riconoscimento della
linea di riva sulle immagini generate dalla telecamera è affetto da un errore medio di circa 0.5 m, valore accettabile
anche in considerazione dell’elevato numero di immagini acquisibili che può portare ad una riduzione dell’errore inerente
a ciascuna singola misura. Il calcolo è stato fatto su tutto il tratto di costa ripreso dalla camera e diviso in 21 settori di
lunghezza omogenea con un applicativo di AutoCAD appositamente creato per il calcolo diretto delle aree e della linea
di riva media.
Questa tecnologia di video monitoraggio non consente comunque la realizzazione di un modello digitale del
terreno e la valutazione delle variazioni volumetriche della spiaggia.
www.beachmed.it
- 69 -
Projet BEACHMED – Phase C
Attività 1: Fabbiso-gni di sabbia per la ricostruzione e la-manutenzione dei li-torali
Grafico dello scostamento della linea di riva digitalizzata su immagine da telecamera rispetto a quella rilevata con GPS. Le
due telecamere sono posizionate nel settore 11; si nota uno scostamento minore per la telecamera che guarda i settori 12 – 21,
quelli oggetto dell’intervento di stabilizzazione
Il monitoraggio dell’evoluzione della spiaggia di Alassio è stato condotto attraverso il calcolo della linea di riva
media mensile ottenuta mediante l’estrazione della linea di riva di 5 giorni consecutivi al mese. La scelta dei giorni in cui
vengono estratte le linee di riva è effettuata in base al grado di visibilità e risoluzione delle immagini ortorettificate e
georeferenziate acquisite dalle telecamere. La linea di riva media mensile è stata calcolata sia per il tratto di spiaggia nel
quale è installato il BMS sia per il tratto in condizioni naturali.
Lo stesso risultato nel calcolo della linea di riva media è stato ottenuto ricavandola dai valori delle aree che
ciascuna linea di riva forma all’interno dei settori in cui i due tratti di spiaggia (Nord e Sud) sono stati suddivisi e dal
calcolo diretto delle linea di riva media ottenuta tramite l’applicativo di AutoCAD. Una ulteriore analisi per la spiaggia di
Alassio si è basata sullo studio dell’evoluzione della spiaggia oggetto di studio nei due tratti (con il BMS e senza) post
eventi di mareggiata. Il confronto fra le linee di riva medie calcolate per giorni consecutivi di mare grosso e le linee di riva
di giorni di mare calmo permette anche di valutare la dinamicità della spiaggia e quindi il diverso grado di erosione della
stessa da un settore all’altro ed anche in questo caso si sono riscontrate variazioni significative. Questi dati ci indicano il
forte grado di variabilità di un arenile anche se con caratteristiche di bassa energia come quello in questione. I grafici
delle variazioni mensili mettono in evidenza scostamenti massimi di oltre dieci mesi fra stagioni differenti, inoltre è
evidente come anche eventi di mareggiate giornaliere provochino arretramenti dell’ordine del metro. Risulta quindi
intuitivo che per avere una stima delle variazioni storiche della linea di riva andrebbero considerati rilievi almeno dello
stesso mese dell’anno, nella stagione estiva ed effettuati in giorni distanti da eventi mareggiata. Inoltre la precisione del
metro, ottenibile da alcune tecniche di rilievo più speditive, può risultare quindi accettabile alla luce delle considerazioni
appena fatte.
SCHEMA RIASSUNTIVO DI CONFRONTO FRA LE TECNOLOGIE DI RILIEVO DELLA LINEA DI RIVA
Abbiamo visto all’inizio come il semplice monitoraggio della linea di riva possa solo essere indicativo dello stato
di avanzamento o erosione di un litorale e che solo il rilievo di tutta la spiaggia, fino alla profondità di chiusura, è utile per
definire il bilancio sedimentario e per valutare l’efficacia di progetti di difesa del litorale.
In questo capitolo sono è stata omessa la descrizione della tecnologia di rilievo tradizionale e con GPS già
ampiamente descritta nelle metodologie di rilievo delle spiagge emerse.
Anche in questo caso valgono le considerazioni fatte per lo schema riassuntivo delle metodologie di rilevo della
spiaggia emersa ovvero che ogni metodologia può essere adatta a diverse esigenze di monitoraggio in termini di
precisione richiesta, estensione dell’area da investigare, tempi e costi di realizzo e che la tabella seguente vuole essere
solo uno schema riassuntivo ed è perciò solo indicativa. Le precisioni riportate si riferiscono infine ad elaborazioni e
www.beachmed.it
- 70 -
Projet BEACHMED – Phase C
Attività 1: Fabbiso-gni di sabbia per la ricostruzione e la-manutenzione dei li-torali
tecniche effettuate al massimo della loro potenzialità.
Metodo
Precisione Tempi di
rilievo
(Km/gg)
Costi minimi di
rilievo - €/Km
Note
Stazione Totale
5 cm
10
200
Necessita inquadramento (solo per il
primo rilievo)
GPS geodetico
5 cm
20
150
Necessita inquadramento iniziale (solo per
il primo rilievo) e post-elaborazione.
GPS solo codice
30 cm
20
100
Necessita post-elaborazione con Stazione
Permanente.
Video sistemi
0.5 m
1
15000/numero riprese
Aerofotogrammetria
non convenzionale
2m
100
50
Immagini da satellite
1m
50
100
Solo per zone limitate e montata su
edificio. Consente più riprese giornaliere.
Necessita punti di appoggio (anche CTR)
ed elaborazione fotogrammetrica digitale
(solo per il primo rilievo).
Solo per aree estese (min 50 Km2),
necessita punti di appoggio (anche CTR).
Possibilità di ripresa con mare mosso e di
copertura non coeva della stessa zona.
Schema riassuntivo delle metodologie di rilievo della linea di riva
Metodi di acquisizione dei dati della spiaggia sommersa
Sea Sled, Crab (Coastal Research Amphibious Buggy) La sea sled
è una slitta (con varianti su ruote) sulla quale è posta un’asta graduata in
posizione verticale. La slitta, che poggia sul fondo del mare, viene prima trainata
verso il largo da una imbarcazione e poi recuperata verso riva tramite un
verricello le cui rotazione segna la lunghezza del cavo recuperato e quindi del
tratto che viene coperto dalla slitta. L’asta che emerge dalla superficie del mare
indica la profondità dell’acqua che viene letta da terra con un cannocchiale. Con
questo sistema si possono eseguire profili di spiaggia di buona precisione (3 cm
in quota), ma l’operatività è ridotta ed i tempi di esecuzione assai lunghi.
Il sistema, molto utilizzato negli Stati Uniti, ha trovato una ridotta
applicazione in Europa e non risulta che in Italia siano mai state costruite o
adottate slitte di questo tipo.
Sono stati sviluppati anche veicoli semoventi in grado di acquisire la
propria posizione e profondità, tramite GPS cinematico, fra i quali il CRAB
(Coastal Research Amphibious Buggy) è il più collaudato (Dean, 2002).
Esempio di CRAB in azione sulle
coste statunitensi
RILIEVO CON ECOSCANDAGLIO (SINGLEBEAM)
Il rilievo batimetrico con ecoscandaglio (singlebeam) è il sistema attualmente più utilizzato per effettuare i rilievi
idrografico. Viene eseguito con una imbarcazione di contenuto pescaggio, capace quindi di rilevare anche in bassi
fondali, e opportunamente attrezzata che percorre, a bassissima velocità, le rotte di progetto, spesso perpendicolari alla
www.beachmed.it
- 71 -
Projet BEACHMED – Phase C
Attività 1: Fabbiso-gni di sabbia per la ricostruzione e la-manutenzione dei li-torali
linea di riva. Queste generalmente rappresentano il proseguimento delle sezioni utilizzate per il rilievo della spiaggia
emersa. Vengono spesso effettuate anche alcune rotte perpendicolari alle precedenti come controllo delle quote agli
incroci. Il rilievo viene effettuato a mare calmo ed in assenza di vento.
Esempio di rilievo singlebeam a rotte parallele nell’area test Tenuta di San Rossore
Il sistema è generalmente composto da un calcolatore di bordo in cui è installato il software di navigazione ed
un ecoscandaglio in asse con il sistema ricevente (GPS-DGPS-Prismi). Questo consente anche ad un solo operatore di
svolgere il rilievo.
Una configurazione completa di un sistema integrato singlebeam dovrebbe essere composta dai seguenti
apparati:
• Sistema di posizionamento superficiale (DGPS, RTK, sistemi ottici, sistemi
range-range, sistemi range bearing);
• Sistema di acquisizione ed elaborazione dati composto da hardware e
software generalmente dedicati a questo specifico scopo;
• Ecoscandaglio idrografico professionale;
• Compensatore d’onda per la correzione delle profondità rilevate in relazione
al moto ondoso;
• Compensatore di moto per la correzione delle profondità rilevate in funzione
dei movimenti di rollio e beccheggio del trasduttore dell’ecoscandaglio
(generalmente non utilizzato);
• Sonda di velocità del suono in acqua (non sempre utilizzata);
Ecoscandaglio
idrografico
Odom
• Mareografo (non necessario se si utilizza un sistema di posizionamento Hydrotrac
RTK).
L’uso di un GPS “RTK” offre notevoli vantaggi in quanto, oltre alle coordinate planimetriche, calcola anche la
quota assoluta del trasduttore in tempo reale e con precisione centimetrica. Diventa possibile, in abbinamento con i dati
provenienti dall’ecoscandaglio, correggere così automaticamente tutte le oscillazioni della superficie marina (marea,
onde, sovralzo dovuto alla massa d'acqua spinta dal vento) durante il rilievo batimetrico.
Gli ecoscandagli singlebeam utilizzati sono di tipo idrografico con risoluzione digitale di 1 cm. Il trasduttore
emette un impulso sonoro, il segnale di ritorno dell’onda riflessa dal fondo viene rilevato dalla sonda. Il tempo di ritorno
del segnale dipende dalla velocità del suono in acqua. Il rilievo risulta quindi puntuale sotto la traiettoria
dell’imbarcazione. La frequenza adottata è generalmente di 200 KHz; un buon compromesso per garantire un rilievo
accurato del fondale con poca interferenza della colonna d'acqua. In generale le frequenze più usate sono da 100-1000
Khz. La determinazione della velocità del suono in acqua è forse la procedura più difficile di tutta l’operazione. La
velocità del suono varia infatti con la densità e le proprietà elastiche dell’acqua che sono funzione della temperatura, dei
www.beachmed.it
- 72 -
Projet BEACHMED – Phase C
Attività 1: Fabbiso-gni di sabbia per la ricostruzione e la-manutenzione dei li-torali
materiali in sospensione o dissolti e della salinità. L’ecoscandaglio viene quindi tarato per la temperatura dell’acqua e la
salinità, o direttamente ad una profondità nota tramite il metodo “bar check”, ovvero facendo riferimento ad una apposita
piastra metallica calata in acqua a profondità note.
Nelle acque basse la temperatura e la salinità variano notevolmente. Un aumento di 5° in 5 metri di profondità
può causare un errore fino a 10 cm (Gibeaut,1998).
Anche il cono di apertura del segnale dei vari trasduttori influenza notevolmente la precisione del rilievo. La
porzione di fondale insonificata dal sonar è uguale a:
P = 3.14 D2 tan2 (a/2),
dove D è la profondità ed “a” rappresenta l’angolo di illuminazione in gradi del segnale. Ad esempio ad una
profondità di 15 m un trasduttore con apertura di 1.5 deg copre un area di 40 cm contro i 5.5 m per uno a 20 deg.
Ulteriori sensori permettano le correzioni per il rollio ed il beccheggio dell’imbarcazione che provocano errori
anche notevoli nelle misure. Ad esempio, 8° di inclinazione a 10 metri di profondità causano un errore di 10 cm sulla
quota e 150 sulla planimetria (Gibeaut,1998). E’ quindi fondamentale eseguire il rilievo a mare completamente calmo.
L’errore probabile sulle misure di profondità, tenendo conto anche dell’errore proprio di un ecoscandaglio di
precisione, può essere stimato in condizioni ottimali pari a circa ±7 cm, normalmente invece la precisione dei rilievi è
dell’ordine di ±17 cm. La precisione scende ulteriormente se non vengono effettuate le correzioni di marea o se non
viene controllata periodicamente la taratura dell’ecoscandaglio (Aminti, 1999).
Per il progetto BEACHMED, nel gennaio 2004, è stato effettuato un rilievo dalla foce del Fiume Arno fino a
quella del fiume Morto (PI). Sono state effettuate circa 90 sezioni con equidistanza da 50 a 100 metri fino alla profondità
di dieci metri, sul prolungamento delle sezioni a terra.
Il rilievo è stato eseguito con una imbarcazione predisposta per lavorare su bassi fondali (Canadian 4.30 della
Italmarine) adeguata alle esigenze della rilevazione con stabilizzatori di rollio e fornita, per la determinazione della
posizione planimetrica, di un sistema GPS differenziale LandStar Surveyor, dotato del sevizio satellitare di trasmissione
delle correzioni differenziali.
L’imbarcazione inoltre era equipaggiata con il programma di navigazione WinBat e di un ecoscandaglio
idrografico a singola frequenza 500 KHz HSL-ES 305 con cono di emissione di 4° e range di impiego che di 0.30 a 60
metri.
Sono state misurate 5 verticali al secondo ad una velocità di crociera di circa tre nodi.
Per ogni sezione di lavoro si è provveduto alla taratura dello scandaglio tramite piastra equidistante collocata
alla profondità di 2 e 9 metri (metodo bar check).
L’editing della strisciata digitale ha visto la correzione tramite programmi adeguati dei disturbi dovuti al moto
ondoso, alla marea, che è stata rilevata contestualmente.
Il rilievo in mare è stato integrato con quello topografico del fondo in prossimità della riva e della parte emersa.
E’ stato quindi effettuato il controllo delle sezioni attraverso il confronto con i dati provenienti dal rilievo di ulteriori sezioni
trasversali.
Oltre ai dati originali di rilievo sono stati prodotti profili di sezioni a scala 1:2000/1:200 e la cartografia a scala
1:2000/1:5000. Questo rilievo è stato eseguito in contemporanea ad un rilievo con tecnologia Multibeam per effettuare
un confronto fra le due tecnologie.
Nel Febbraio 2004 sono stati eseguiti ulteriori rilievi di confronto all’Iisola d’Elba nei Golfi di Procchio, Spartaia e
Sant’Andrea ed ulteriori test sono attualmente in fase di svolgimento.
Una prova che è stata ulteriormente effettuata nel Golfo di Procchio è stata la verifica di un rilievo singlebeam
eseguito senza correzione della quota del GPS “RTK”. I dati riferiti alla quota sono stati infetti registrati separatamente
all’interno del ricevitore GPS e quindi non sono stati accoppiati in tempo reale a quelli di profondità provenienti
dall’ecoscandaglio. Il rilievo è stato effettuato a mare completamente calmo. I dati di profondità sono stati quindi corretti
con i dati di marea e paragonati successivamente a quelli aventi la correzione di quota GPS. Il risultato ottenuto mostra
due set di dati sono praticamente identici durante tutto l’arco del rilievo.
www.beachmed.it
- 73 -
Projet BEACHMED – Phase C
Attività 1: Fabbiso-gni di sabbia per la ricostruzione e la-manutenzione dei li-torali
RILIEVO CON MULTIBEAM
Il sistema multibeam è una tecnologia che consente di avere una mappatura di alta definizione del fondale
marino investigato. Rispetto alle classiche metodologie di rilievo batimetrico con un normale ecoscandaglio, questa
tecnica si caratterizza per la notevole mole di dati acquisiti nella stessa unità di tempo.
Si tratta di una strumentazione che, anziché misurare una sola profondità ne misura 60, 100 o 240
contemporaneamente a seconda della sua apertura angolare. Oggettivamente l’utilizzo di un sistema multibeam
aumenta in modo esponenziale le potenzialità di un singolo ecoscandaglio (Maso, 2002).
Tecnicamente esso può essere descritto come un sonar acustico che rileva le distanze tra il trasduttore ed il
fondale marino o qualsiasi altro target presente sul fondo.
Il trasduttore del sistema è
composto da tanti ricevitori che rilevano
l’eco di ritorno proveniente dal suono
emesso dal trasmettitore e riflesso dal
fondo.
Uno strumento con apertura di
90° rileva una porzione di fondale pari a
due volte la profondità presente al di
sotto del trasduttore, mentre un’apertura
Esempio di fascia di acquisizione di un sistema multibeam (sinistra) e singlebeam (a
di 150° arriva fino a sette volte.
destra)
La spaziatura tra i singoli
segnali, a sua volta, determina il grado di risoluzione spaziale con
cui uno strumento è in grado di discernere gli oggetti presenti sul
fondo; uno strumento con una spaziatura di 0.5°, in opportune
condizioni, sarà in grado di rilevare anche una piccola condotta
presente sul fondo.
In ogni istante il fascio emesso e rilevato dal trasduttore
di un multibeam deve essere posizionato correttamente rispetto al
sistema di riferimento utilizzato per eseguire i rilievi.
Ciò comporta che per poter funzionare adeguatamente,
un sistema multibeam necessita dei seguenti strumenti di misura:
Sistema 8101 Reson: trasduttore, unità di superficie e
• sistema di posizionamento GPS differenziale,
schermo di controllo
• girobussola,
• sensore di moto,
• sonda di velocità del suono in acqua.
Il sistema di posizionamento è necessario per poter
georeferenziare ogni singola distanza misurata dai beams di cui
è composto il trasduttore; la girobussola fornirà l’informazione
riguardante l’orientamento del fascio del multibeam, il sensore di
moto correggerà i movimenti del trasduttore relativi al moto
ondoso, al rollio ed al beccheggio dell’imbarcazione, ed infine la
sonda di velocità del suono fornirà il giusto valore di
propagazione acustica lungo tutta la colonna d’acqua.
I dati misurati dai singoli strumenti sono gestiti da un
sistema di navigazione ed acquisizione che provvederà ad
associare ad ogni distanza misurata dal trasduttore una terna
corretta di valori X,Y e Z nel sistema di riferimento utilizzato.
I dati ottenuti sono trasferiti ad un PC per il Esempio di filtraggio dati eseguito durante il rilievo a San
processamento che comporta quanto segue (Matsumoto et al, Rossore
www.beachmed.it
- 74 -
Projet BEACHMED – Phase C
Attività 1: Fabbiso-gni di sabbia per la ricostruzione e la-manutenzione dei li-torali
2001):
Compensazione dei sensori di moto e latenza di tempo (patch test),
• Correzione della velocità del suono e della marea,
• Identificazione e rimozione del rumore,
• Considerazioni sulla distribuzione degli ostacoli e bassi fondali,
• Selezione del suono.
Il criterio di acquisizione dati multibeam si basa sulla copertura totale di un’area da indagare.
Fondamentalmente tanti più dati verranno rilevati sulla superficie di quest’area tanto più dettagliata sarà la definizione
della morfologia del fondale.
A tale scopo, prima di eseguire i rilievi, viene definita la cosiddetta “maglia di acquisizione”, che verrà ad essere
costituita da tante piccole celle di una determinata ampiezza (es. 1x1 m o 0.5x0.5 m) a seconda del grado di risoluzione
desiderato.
Durante l’acquisizione, ogni volta che il sistema rileverà delle profondità all’interno di quelle celle provvederà ad
eseguire la media di tutte le misure effettuate ed a fornire la profondità media per quella unità di superficie. Al termine
del processo tutta l’area indagata sarà uniformemente coperta da una densità di punti tale da definire con un alto grado
di dettaglio la batimetria della zona.
Uno degli svantaggi di questo sistema è la scarsa operatività nei bassi fondali. In generale esso può operare in
acque profonde da un minimo di 1.5-2 m in poi. Un altro problema è la falsa rifrazione indotta dalla presenza di pendii
laterali estremamente ripidi (Piccin et al, 2002).
Vale inoltre la pena di citare la tecnologia GeoSwath. Si tratta di uno strumento disponibile solo recentemente
sul mercato specialmente in Italia, costituito da un interferometrico multiraggio per il rilievo a larga fascia completamente
integrato, adatto al rilievo di bassi fondali, ed economicamente vantaggioso. Il GeoSwath è un sonar progettato per
fornire una alta risoluzione di rilievo. Usa la tecnologia di misura di fase (interferometrica) che offre il vantaggio di
coprire un’amplia fascia di fondale (10-30 volte la profondità) con una notevole risoluzione attraverso un sistema
compatto, adatto per operare in bassi fondali, laddove, come abbiamo visto, i sistemi multibeam hanno particolari
problemi. Inoltre tale sistema offre il vantaggio di poter acquisire dati
tipo “sidescan sonar” di ottima qualità.
Per il progetto BEACHMED, nel periodo Dicembre 2003 Gennaio 2004, è stato effettuato un rilievo in un tratto di costa di 6
km dalla foce del Fiume Arno fino a quella del Fiume Morto fino alla
batimetria 10 m. E’ stato inoltre rilevato il fondale antistante una
spiaggia in ghiaia posta a sud dell’abitato di Marina di Pisa. In
contemporanea, come descritto nel precedente paragrafo, è stato
eseguito un rilievo singlebeam. L’imbarcazione utilizzata per il rilievo
è una “Yeanneau Merry Fischer 625”.
L’imbarcazione era equipaggiata con unità di
posizionamento e navigazione con software PDS 2000, DGPS,
sensore di moto iXsea “Octans”, unità di calibrazione per la velocità
del suono, sonda CTD Hydrolab Datasonde 4 ed unità Multibeam
modello Reson 8101. Per il rilievo batimetrico si è utilizzata una
versione evoluta, in termini di ampiezza di swath/spazzata, del
sistema 8101 standard della Reson. Questo strumento, operante a
240 kHz, garantisce un rilievo di massima accuratezza, in linea
teorica, da 0.5 metri fino a 300 metri di profondità di fondale. Il Unità di posizionamento sull’imbarcazione con
sistema SeaBat 8101ES utilizza 101 beams/fasci spaziati di 1.5° tra software PDS2000
loro. Il settore d’indagine del trasduttore è di 150° con una ampiezza
lineare di swath superiore a 7 volte la profondità. Questo sistema raggiunge l’accuratezza di 2.5 -3.0 cm. Grazie alla
elevata frequenza di ripetizione degli impulsi emessi, lo strumento è in grado di effettuare rilievi ad oltre 11 nodi di
velocità mantenendo un dato di qualità ottimale. Ciò consente di effettuare 40 profili completi per secondo e mantenendo
una copertura del fondale pari al 100% .
•
www.beachmed.it
- 75 -
Projet BEACHMED – Phase C
Attività 1: Fabbiso-gni di sabbia per la ricostruzione e la-manutenzione dei li-torali
Nel Febbraio 2004 sono stati eseguiti
ulteriori rilievi all’Isola d’Elba, nei Golfi di
Procchio, Spartaia e Sant’Andrea, ed ulteriori
test sono in corso di svolgimento. Tutti i rilievi
sono stati effettuati in contemporaneità anche
con metodologia singlebeam al fine di poter
verificare le singole precisioni e potenzialità di
utilizzo.
Si è anche valutata la possibilità di
impiego del sistema Geoswath, la cui
operatività è stata analizzata durante un test
svoltosi nel Golfo di La Spezia. Il sistema
Esempio di restituzione dei dati acquisiti con il Swathplus in prossimità della utilizzato era un Swathplus (234 Khz) della
SEA Ltd. Il rilievo è avvenuto con una
diga foranea del porto di La Spezia
imbarcazione “Blue Dream” equipaggiata
anche con DGPS e sensore di moto Coda Octopus F180.
Il rilievo è avvenuto nella parte orientale del porto ed in prossimità di alcune scogliere. I primi risultati, come da
aspettative, confermano la validità di questa tecnologia in termini di accuratezza e copertura laterale.
Viene di seguito riportato il risultato delle elaborazioni sul confronto effettuato fra rilievi singlebeam e multibem
nelle zone oggetto di rilievo contemporaneo.
Le immagini mostrano una restituzione dei due rilievi con isobate ogni metro. Come accennato, uno dei limiti
del multibeam è il non poter operare in bassi fondali. Le due carte infatti, per problemi di confrontabilità, iniziano da una
profondità di circa 2 m anche se il singlebeam aveva rilevato fino a 0.5 m. Si può notare meglio come non sussistono
evidenti differenze nella restituzione delle due differenti metodologie di rilievo.
www.beachmed.it
- 76 -
Projet BEACHMED – Phase C
Attività 1: Fabbiso-gni di sabbia per la ricostruzione e la-manutenzione dei li-torali
Carta batimetrica prodotta con i dati provenienti da acquisizione multibeam (a sinistra) e con acquisizione
singlebeam (a destra) nell’area test di San Rossore
Carta batimetrica prodotta con i dati provenienti da acquisizione multibeam (a sinistra) e con acquisizione
singlebeam (a destra) nell’area test di Marina di Pisa
www.beachmed.it
- 77 -
Projet BEACHMED – Phase C
Attività 1: Fabbiso-gni di sabbia per la ricostruzione e la-manutenzione dei li-torali
Nella figura a lato si può notare come
l’andamento delle isobate risulti simile nel basso fondale
mentre a profondità maggiori si nota uno sfalsamento fra i
due rilievi. Questo potrebbe essere dovuto ad una minima
differenza nelle quote rilevate che accentua lo
sfalsamento sul piano a pendenza minore o ad un errore
della strumentazione che si accentua con la profondità.
La disomogeneità delle quote può essere stata causata
ad una diversa correzione dei dati di marea fra i due rilievi
e forse alla precisione intrinseca del sistema.
L’andamento simile delle isobate indica comunque che un
corretta spaziatura delle linee di rilievo singlebeam
permette di ottenere un risultato equiparabile a quello del
rilievo multibeam.
Le figure a seguire mostrano le carta delle
differenze altimetriche fra i due rilievi. Le carte sono state
ottenute attraverso una elaborazione in Surfer 8.0
eseguendo un operazione di sottrazione di quote nei
punti di griglia, fra i dati rilevati in acquisizione multibeam
e quelli rilevati in acquisizione singlebeam.
In questo caso sono più evidenti le differenze fra
le due metodologie. Anche se in molte zone la differenza
è contenuta all’interno dei 10 cm, ordine di errore
intrinseco nell’accuratezza della strumentazione, non
sempre però l’interpolazione delle linee di rilievo
(equidistanti dai 100 ai 50 m) ottenuta dal singlebeam è in
grado di identificare le minime variazioni morfologiche
rilevate dal multibeam; questo risulta più evidente in aree
Confronto dell’andamento delle isobate dedotte dai due rilievi a
con morfologia più contrastata come potrebbe ad Marina di Pisa
esempio essere un fondale roccioso. La differenza non
costante fra i due rilievi può essere in parte dovuta alla non esatta contemporaneità delle acquisizioni. I due rilievi del
tratto meridionale sono sfasati di alcuni giorni ed è probabile che parte delle differenze sia dovuta alle variazioni
morfologiche intervenute, come è evidente nella zona delle barre. La differenza di volume fra i due rilievi calcolata in un
tratto della spiaggia di Marina di Pisa, su una superficie di circa due milioni di metri quadri, è risultata di 1750 m3, anche
se l’errore reale è assai superiore dato che le differenze di segno opposto tendono ad annullarsi vicendevolmente.
Successivamente sulla zona test di Marina di Pisa, nel tratto in cui le linee di rilievo presentano un’equidistanza
di 50 m, sono stati effettuati ulteriori controlli.
Si è cercato di identificare la distanza massima fra le linee di rilievo di singlebeam per ottenere un informazione
comunque paragonabile a quella proveniente dal multibeam.
Il controllo ha previsto l’elaborazione di successive carte con equidistanza da 50 a 200 m con utilizzo del
software Surfer 8.0, ed il confronto con la carta ottenuta dai dati del multibeam per la medesima zona.
Per la costruzione delle singole carte sono state utilizzate 18 strisciate di acquisizione singlebeam ad
equidistanza di 50 m successivamente diradate fino a 200 m.
www.beachmed.it
- 78 -
Projet BEACHMED – Phase C
Attività 1: Fabbiso-gni di sabbia per la ricostruzione e la-manutenzione dei li-torali
Nella figura soprapresentata è visibile l’area di studio e le 18 sezioni utilizzate che corrispondono a quelle
centrali di minor lunghezza a cui fanno da limite le prime più
estese.
Un controllo sulle differenze volumetriche ha evidenziato
un aumento del valore in termini di valore assoluto, in funzione
dell’equidistanza, anche il valore della media rilevata sui singoli
dati in termini di valore assoluto ha mostrato un aumento. Questo
indica che all’aumentare della distanza di acquisizione
ovviamente aumenta il grado di interpretazione e
conseguentemente la carta ottenuta risulta avere un grado di
incertezza maggiore, che si esprime, in un aumento delle
differenze volumetriche tra le due carte e in un aumento del
valore della media dei dati assoluti, che può essere considerato
come indicativo di quanto le quote interpretate si allontanano
dalla realtà (considerata come il multibeam).
Come si vede le informazioni a quote inferiori alla
batimetrica -5.5 m si sono mantenute anche con elevate
equidistanze mentre a quote superiori, dove la morfologia è meno
regolare, risulta evidente una perdita di informazione.
Un limite massimo di accettabilità potrebbe essere
considerato 150 m per le zone con una discreta variabilità
morfologica, mentre per zone a bassa variabilità possono essere
considerate anche equidistanze di 200 m.
Carta delle differenze altimetriche fra singlebeam
e multibeam a San Rossore
www.beachmed.it
- 79 -
Projet BEACHMED – Phase C
Attività 1: Fabbiso-gni di sabbia per la ricostruzione e la-manutenzione dei li-torali
Carta delle differenze altimetriche fra singlebeam e multibeam a Marina di Pisa
Confronto fra le carte batimetriche ottenute dalle linee di rilievo di singlebeam a equidistanze crescenti
(50,100,150,200 m)
www.beachmed.it
- 80 -
Projet BEACHMED – Phase C
Attività 1: Fabbiso-gni di sabbia per la ricostruzione e la-manutenzione dei li-torali
RILIEVO CON LIDAR MARINO (ALB)
L’Airborne Laser Bathymetry (ALB) è una tecnica che consente di effettuare rilievi batimetrici a bassa profondità
usando impulsi laser trasmessi da un apparecchiatura avio-trasportata.
Questa tecnologia è nata negli stati uniti per scopi militari (ricerca di sottomarini) negli anni ‘60. Negli anni ‘90 il
sistema è divenuto operativo in ambito commerciale negli Stati Uniti (SHOALS), in Australia (LADS-LADSII) ed in Svezia
(Hawk Eye).
Il sistema, a seconda della tipologia, può essere montato o su piccoli aerei o su elicottero.
Le principali ragioni per l’utilizzo di questa tecnica sono la possibilità di:
•
eseguire rilievi in tempi rapidi anche in ampie aree,
•
effettuare rilievi in zone dove la metodologie tradizionali potrebbero essere difficoltose da applicare o pericolose,
•
eseguire contemporaneamente rilievi del fondale e della zona emersa come anche le strutture costiere.
Il Lidar marino è particolarmente adatto in rilievi di bassa profondità. Uno dei vantaggi è la possibilità di poter
rilevare simultaneamente la parte emersa e quella sommersa della spiaggia, anche a basse profondità dove sistemi
come il multibeam non possono operare. Questa tecnica utilizza due impulsi laser, uno verde ed un infrarosso. Il primo
penetra attraverso l’acqua per la sua particolare frequenza, mentre il secondo viene riflesso dalla superficie del mare e
dalla spiaggia emersa. La profondità dell’acqua è derivata dalla differenza di tempo di ritorno fra il segnale riflesso dalla
superficie marina e quello riflesso dal fondale. Si tratta di una apparecchiatura complessa, che varia leggermente a
seconda delle case costruttrici, in generale costituita da un trasmettitore laser che può generare fino a 1000 impulsi al
secondo, da alcuni ricevitori del segnale di ritorno, da un GPS differenziale per seguire la rotta impostata, da una
tecnologia GPS per il “real time” e “post-flight data processing”, da un insieme di sensori per le correzioni automatiche di
rollio e beccheggio e da un sistema inerziale.
L’altezza di volo è compresa fra i 200-5000 metri. La massima inclinazione dello scanner laser è di circa 20°
con una fascia di indagine pari a circa la metà della quota di volo. I rilievi generalmente avvengono con una densità di un
punto ogni 16 m2, ma può essere raggiunta anche una densità maggiore, con coperture areali di circa 60 Km2/ora.
I dati, una volta raccolti e processati anche da particolari algoritmi per la correzione delle fluttuazioni della
superficie e delle proprietà ottiche dell’acqua, vengono elaborati e restituiti secondo le metodologie tradizionali.
La limitazione principale di questo sistema è la scarsa penetrazione in acque non estremamente limpide e con
bassa riflettività del fondale. In generale possiamo dire che la profondità massima raggiungibile è pari a 2-3 volte quella
di “Secchi”. In termini più specifici la profondità massima rilevabile è data da n/K, dove n è una costante che varia da 3 a
5 a seconda che sia giorno o notte, mentre K è un fattore esponenziale per il quale il vettore della irradianza della luce
incidente decresce con la profondità.
Il raggio laser in acqua viene disperso oltre che dalle onde anche dalla presenza di materiale organico ed
inorganico. In acque caraibiche di notte sono stati raggiunti i 70 m di profondità.
La precisione verticale potenzialmente raggiungibile dall’ALB è di ± 15 cm; che rientra nello standard
generalmente accettato per i rilievi idrografici e stabilito dall’International Hydrographic Organization (IHO). In maniera
semplificata l’accuratezza verticale per rilievi idrografici a bassa profondità è di ± 25 cm (1σ). Possiamo dire che tutti i
sistemi ALB esistenti hanno potenzialmente una accuratezza maggiore.
Una nuova funzionalità del sistema SHOALS 1000 permette di avere immagini di pseudo-riflettanza del fondale
utili per la sua caratterizzazione.
Per il progetto BEACHMED, nell’Ottobre 2003, è stata svolto un test con la società australiana Tenix LadsII per
effettuare il rilievo della spiaggia emersa e sommersa tra la foce del Fiume Arno fino a quella del Fiume Morto. In Italia
infatti non esistano allo stato attuale ditte in possesso di tale tecnologia.
Precedente al volo è stata fatta una campagna in mare per verificare la trasparenza della acque con il disco di
Secchi. I risultati sono stati negativi e tali da non poter effettuare la scansione. E’ stato fatto comunque un tentativo di
rilievo nelle acque antistanti Massa, dove è presente una maggiore trasparenza delle acque, ma la strumentazione non
è stata in grado di acquisire dei dati utilizzabili.
E’ in corso un’analisi dei dati disponibili sulla trasparenza delle acque delle coste toscane al fine di valutare le
effettive possibilità di utilizzazione di questa metodologia, che risulta comunque estremamente costosa. Sono stati
www.beachmed.it
- 81 -
Projet BEACHMED – Phase C
Attività 1: Fabbiso-gni di sabbia per la ricostruzione e la-manutenzione dei li-torali
elaborati i dati forniti dall’ARPAT relativi al monitoraggio dal 2001 ad oggi di circa 40 stazioni distribuite sull’intera costa
toscana (vd tabella). Si può notare in grassetto le stazioni in cui la profondità del fondale è inferiore a tre volte quella di
“Secchi”.
LAT.
LONG.
Dist. Costa
(m)
5
43°58’.480 N
10°08’.340 E
500
4.0
10
43°58’.242 N
10°07’.917 E
1000
3.5
14
43°57’.572 N
10°06’.744 E
3000
Data
Ora
Temp
Sal.
Torb.
Stazione
Chla Secchi P (m)
11/01/02
11.45
9.822
36.446
7.2
01BWCN05
5.54
3.0
11/01/02
11.37
9.626
36.722
8.8
01BWCN10
4.75
11/01/02
11.26 12.079
37.745
6.5
01BWCN30
2.15
Esempio di dati raccolti dall’ARPAT nella stazione del Cinquale (MS)
SCHEMA RIASSUNTIVO DI CONFRONTO FRA LE TECNOLOGIE DI RILIEVO DELLA SPIAGGIA SOMMERSA
Anche in questo caso valgono le considerazioni fatte per i precedenti schemi riassuntivi delle metodologie di
rilevo ovvero che ogni metodologia può essere adatta a diverse esigenze di monitoraggio in termini di precisione
richiesta, estensione dell’area da investigare, tempi e costi di realizzo e che la tabella che segue vuole essere solo uno
schema riassuntivo ed è perciò solo indicativa.
Metodo
Precisione
Tempi di rilievo
(Km2/gg)
Costi minimi di rilievo €/Km2
Note
Singlebeam
10 cm
10
1000
Dati riferiti a sezioni distanziate 100 m.
Multibeam
15 cm
10
5000
Difficoltà di rilevare la fascia compresa fra 0 e –2
m.
ALB
15 cm
50
4000
Risente della trasparenza delle acque. Non ancora
disponibile stabilmente in Europa. Rileva anche la
spiaggia emersa.
Schema riassuntivo delle metodologie di rilievo della spiaggia sommersa
www.beachmed.it
- 82 -