Politecnico di Torino
CeTeM
Fondamenti di Meccanica Applicata
1
Esercizi
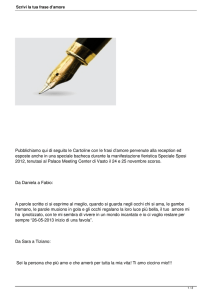
Esercizio 2
Nel meccanismo a glifo raffigurato, il perno A è solidale col braccio
2 ed è costretto a scorrere lungo una scanalatura longitudinale
presente sul braccio 1.
Sono note le dimensioni a = 500 mm e l = 250 mm.
Nell’istante in cui il meccanismo ha la configurazione rappresentata
(ϑ = 30°, braccio 2 orizzontale), il braccio 1 ha una velocità angolare
di verso antiorario e di valore costante ω1 = 5 rad/s.
Determinare in tale condizione:
1. la velocità del perno A relativa al braccio 1;
2. la velocità angolare del braccio 2;
3. l’accelerazione di A relativa al braccio 1;
4. l’accelerazione angolare del braccio 2.
r
r
r
r
[ vrA =4.33 λ m/s; ω2=20 rad/s (oraria); arA =287.5 λ m/s2;
r
2
ω& 2 =1039.2 rad/s (oraria); λ =versore direzione O1→A]
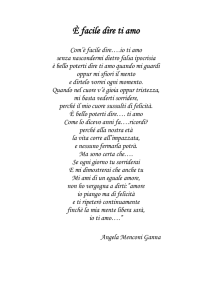
Si considerino i corpi 1 e 2 separati come in figura 2.1.
Il punto A appartiene al corpo 2, quindi il suo moto assoluto, cioè rispetto a un sistema di
riferimento solidale con il piano del foglio, è una rotazione intorno ad O2.
Il corpo 1 si muove rispetto al piano del foglio ruotando intorno ad O1.
Il punto A si muove rispetto al corpo 1 (moto relativo rispetto ad 1) traslando lungo l’asse della
scanalatura.
Il moto di trascinamento si ottiene immaginando il punto A solidale al corpo 1 nella posizione
indicata in figura, cioè supponendo di annullare il moto relativo; tale moto è una rotazione del punto
A intorno al centro O1 per effetto del trascinamento da parte del corpo 1.
Il legame tra i vettori velocità dei tre moti è espresso dalla relazione:
© Politecnico di Torino
Data ultima revisione 20/03/01
Pagina 9 di 61
Autore: Stefano Pastorelli
Politecnico di Torino
CeTeM
Fondamenti di Meccanica Applicata
1
Esercizi
v A = v rA + v t A
ω 2 AO2 ?
⊥AO2
?
?
ω 1 AO1
// AO1
?
⊥AO1
"
M
D
V
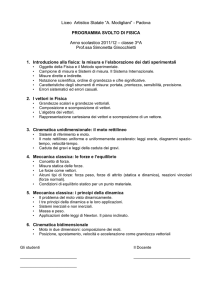
L’equazione vettoriale è rappresentata dal disegno di figura 2.2
Dalla figura si ricavano i versi di v A e v rA e si calcolano i moduli di tali vettori:
vt
ωOA
vrA = A = 1 1 = 4.33 m
s
tan ϑ
tan ϑ
vA =
vt A
sin ϑ
essendo:
O1 A =
=
ω1O1 A
=5 m
s
sin ϑ
a −l
= 0.5 m
sin ϑ
Quindi segue:
v rA = 4.33λ m
s
vA
= 20 rad oraria
(verso dedotto dal verso di v A )
s
AO2
L’accelerazione del punto A può essere espressa pensando A appartenente al corpo 2 (moto
assoluto) o considerando il moto di A rispetto al corpo 1:
a A = a rA + a t A + a c A
ω2 =
© Politecnico di Torino
Data ultima revisione 20/03/01
Pagina 10 di 61
Autore: Stefano Pastorelli
Politecnico di Torino
CeTeM
Fondamenti di Meccanica Applicata
1
Esercizi
L’accelerazione di Coriolis si calcola:
a C A = 2ω 1 ∧ v rA
Scomponendo i vettori a A e a t A nelle due componenti, normali e tangenziali, dei moti di rotazione
intorno ad O2 e O1 rispettivamente, si ottiene la seguente relazione vettoriale:
a AO
1
n
ω 2 AO2
// AO2
A → O2
2
+ a AO
2
t
= a rA + a t A O
ω& 2 AO2 ?
?
⊥AO2
?
// AO1
?
1
n
ω 1 AO1
// AO1
A → O1
2
+ a tA O + a CA
1t
ω& 1 AO1 = 0
-
2ω1vrA
M
⊥AO1
D
V
"
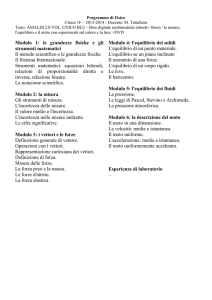
La relazione tra i vettori è rappresentata in figura 2.3
Dalla figura 2.3 si ricavano i versi dei vettori a rA e a A O e si calcolano i loro moduli.
2t
Proiettando il poligono di vettori della figura 2.3 su una retta orizzontale (parallela a AO2) si
© Politecnico di Torino
Data ultima revisione 20/03/01
Pagina 11 di 61
Autore: Stefano Pastorelli
Fondamenti di Meccanica Applicata
Politecnico di Torino
CeTeM
1
Esercizi
ottiene:
arA sin ϑ = aC A cosϑ + at A
sin ϑ + a A
O1 n
O2 n
2ω v cosϑ + ω1 AO1 sin ϑ + ω 2 AO2
arA = 1 r A
= 287.5 m 2
s
sin ϑ
a rA = 287.5λ m 2
s
Proiettando il poligono di vettori della figura 2.3 su una retta verticale (perpendicolare a AO2) si
ottiene:
2
arA cosϑ + ac A sin ϑ = a A
ω& 2 =
aA
2
O2 t
+ at A
cosϑ
O1 n
a rA cosϑ + 2ω1vrA sin ϑ − ω1 AO1
2
O2 t
AO2
=
AO2
= 1039.2 rad
s
oraria
(verso dedotto dal verso di a A O )
2t
© Politecnico di Torino
Data ultima revisione 20/03/01
Pagina 12 di 61
Autore: Stefano Pastorelli