UNIVERSITÀ DEGLI STUDI DI TRENTO
Facoltà di Ingegneria
Corso di Laurea Specialistica in Telecomunicazioni
Tesi di Laurea
Analisi di immagini
e generazione di ambienti tridimensionali virtuali
finalizzati al supporto decisionale
Relatori:
Laureando:
Dr. Ing. Raffaele De Amicis
Marco Pergher
Prof. Francesco G.B. De Natale
Anno accademico 2004 – 2005
Marco Pergher
Tesi di Laurea Specialistica
Marco Pergher
Tesi di Laurea Specialistica
Ringraziamenti
Marco Pergher
Tesi di Laurea Specialistica
Marco Pergher
Tesi di Laurea Specialistica
Indice
1
2
Introduzione
7
1.1
Scopo del progetto ........................................................................ 7
1.2
Strumenti utilizzati ......................................................................... 9
1.3
Problematiche affrontate ............................................................ 10
Stato dell’arte
2.1
11
Tecniche per l’acquisizione
e l’elaborazione dei dati GIS ..................................................... 12
2.1.1 Tecnica a Laser Scanning ............................................. 12
2.1.2 Impiego di immagini satellitari ed
aeree ad alta risoluzione ................................................ 15
2.1.3 Generazione degli elementi geometrici
tridimensionali da cartografia numerica....................... 17
2.2
Applicativi commerciali ............................................................... 20
2.2.1 3DCarto®........................................................................... 20
2.2.2 Google Earth® .................................................................. 24
2.2.3 ArcGIS®............................................................................. 27
3
L’ambiente VTP
3.1
29
VTP: funzionalità base ............................................................... 30
3.1.1 VTBuilder .......................................................................... 30
3.1.2 Enviro ................................................................................ 38
Marco Pergher
Tesi di Laurea Specialistica
6
3.2
4
Limiti del sistema .........................................................................44
Analisi delle immagini e generazione degli oggetti 3D
47
4.1
Analisi delle immagini .................................................................49
4.2
Generazione degli edifici attraverso
l’analisi delle ortofoto...................................................................54
5
4.3
Generazione della vegetazione ................................................60
4.4
Simulazioni ...................................................................................63
Funzionalità avanzate ed applicativi integrati
5.1
67
OpenCV® ......................................................................................68
5.1.1 Estrazione perimetro degli edifici .................................69
5.1.2 Calcolo di aree geometriche ..........................................70
5.2
AppGPS ........................................................................................71
5.2.1 Conversione da coordinate geografiche
a gaussiane e viceversa .................................................72
5.2.2 Interfacciamento AppGPS..............................................74
5.3
6
MapPoint® .....................................................................................77
Campi di impiego
6.1
83
Valutazione impatto ambientale ................................................83
6.1.1 Perforazioni per gallerie..................................................84
6.1.2 Disboscamento dovuto all’installazione
di impianti di risalita o cablaggio del territorio .............84
6.1.3 Fenomeni naturali ............................................................85
6.2
Localizzazione di automezzi
all’interno della mappa 3D .........................................................86
7
6.3
Turismo .........................................................................................87
6.4
Altri impieghi .................................................................................88
Conclusioni
Marco Pergher
91
Tesi di Laurea Specialistica
Capitolo 1
Introduzione
Sono sempre più, i campi applicativi che richiedono l’ausilio di particolari
software in grado di rappresentare diverse tipologie di dati all’interno di
scenari tridimensionali virtuali. Attualmente, grazie all’integrazione di dati
GIS con informazioni correlate a luoghi od elementi presenti su un
determinato territorio, è possibile ottenere sistemi in grado di legare tali
dati alla corrispettiva area geografica. La navigazione tridimensionale, la
visualizzazione di mappe tematiche, la pianificazione di business in
determinate regioni, sono solo alcuni aspetti facenti parte di una vasta
gamma di applicazioni connesse all’informazione georeferenziata.
Il sistema sviluppato si inserisce all’interno all’interno della problematica
che riguarda lo sviluppo di applicazione alla progettazione e pianificazione
di attivita a forte mpatto sul territorio, sulla base di informazioni associate
al dato di tipo GIS.
1.1
Scopo del progetto
Il presente lavoro di tesi ha come scopo principale, l’aggregazione di varie
tipologie di informazioni, inserite all’interno
georeferenziato
finalizzato
all’elaborazione
di un ambiente GIS
dei
dati
necessari
alla
pianificazione ed al processo decisionale.
Marco Pergher
Tesi di Laurea Specialistica
8
Introduzione
In particolare, sulla base di informazioni connesse alle ortofoto, come:
posizione dei fabbricati;
posizione e tipologia della vegetazione;
caratteristiche della mappa stradale;
dimensione degli edifici;
ecc…
si è sviluppata un’applicazione in grado di processare le informazioni
contenute nel layer 2, rappresentadole in maniera esplicita all’interno di
un
ambiente
tridimensionale
automaticamente
dal
sistema
virtuale,
tali
georefernziati
oggetti
in
tempo
a
suovolta
macchina,
sottoforma di geometrie 3D. Iinoltre, grazie all’importazione di una di
informazioni ulteriore ,(info layer 3) quali:
cartografia numerica del piano regolatore;
dati tecnici legati a:
o propagazione di onde elettromagnetiche;
o idraulica;
o interventi aventi impatto sul territorio;
o fenomeni naturali;
o sicurezza nazionale;
database stradale;
dati ed informazioni turistiche;
sono stati implementati specifici algoritmi in grado di processare tali
informazioni ed, attraverso l’uso di simulazioni, rappresentare i risultati
ottenuti all’interno della scena tridimensionale.
L’utente può quindi interagire con i dati attraverso l’interfaccia grafica
3D, andando a modificare parametri e confrontando tra loro più
tipologie di dati, utilizzando un’unica piattaforma software. Inoltre,
inserendo
tali
funzionalità
all’interno
di
un
ambiente
GIS
tridimensionale di facile utilizzo, si è sviluppata un’applicazione ad
Marco Pergher
Tesi di Laurea Specialistica
Introduzione
9
ampio raggio, limitata non solo agli addetti ai lavori aventi conoscenze
e nozioni necessarie alla gestione di particolari dati.
Ipertanto il maggior contributo di questo lavoro di tesi consiste
nell’aver integrato diverse tipologie di dati all’interno di un applicativo
totalmente aperto capace di visualizzare dati con ul elevato gradoi di
realismo inoltre i dati vengono in tempo “quasi reale” processati
e
georefenziate
in
fornendo
ulteriori
informazioni
non
disponibli
precedenza permettendo una valutazione comparative degli stessi
risultando questi ultimi dati di input per simulazioni ulteriori che vengo
esse stesse rappresentate in un ambiete georefeenziato.
1.2
Strumenti utilizzati
L’applicazione software è stata sviluppata utilizzando i seguenti strumenti /
ambienti di sviluppoi /API / libreriegrafiche:
È un open source utilizzato per sviluppare l’applicativo applicazione
Enviro inserita all’interno dell’ambiente VTP,Virtual Terrain Project,
utilizzata come modello base ove inserire le varie funzionalità
implementate;
ambiente di SVILUPPO
dotNet di Microsoft®, utilizzato per la
compilazione del codice scritto in linguaggio C++;
librerie
ANALII DI
IMMAGINE
OpenCV,
inserite
all’interno
dell’applicazione ai fini dell’analisi di immagine o, più in generale,
della Computer Vision.
MA sdk
REMIND NON USI L’APPLICAZIONE
IL CHE è
DVERSOApplicazione MapPoint® di Microsoft®, utilizzata per
accedere al database stradale in essa contenuto, al fine di ricavare
informazioni georeferenziate riferite ai punti di interesse (POI)
presenti in una determinata area geografica.
Sensore
GPS
Bluetooth,
utilizzato
mediante
l’applicazione
AppGPS, per visualizzare all’interno della mappa 3D la posizione
geografica di un determino oggetto.
Marco Pergher
Tesi di Laurea Specialistica
10
Lo
Introduzione
schema
funzionale
ove
vengono
evidenziate
funzionalità
ed
applicazioni utilizzate è il seguente:
1.3
Problematiche affrontate
La realizzazione di questo progetto di tesi ha richiesto l’acquisizione di
conoscenze inerenti a concetti di IMAGE PROCESSING,
computer
graphics e software engineering. Le difficoltà maggiori sono state
riscontrate durante il processo di filtraggio delle ortofoto e nella successiva
fase
di
georeferenziazione
delle
geometrie
generate,
finalizzate
all’inserimento nell’ambente tridimensionale.
L’esposizione del lavoro di tesi, segue essenzialmente il processo di
sviluppo del software. nel Capitolo 2 vengono descritte le principali
tecniche di acquisizione ed elaborazione dei dati GIS, assieme alle
principali applicazioni commerciali che gestiscono queste tipologie di dati.
Il Capitolo 3 descrive le applicazioni implementate all’interno del progetto
VTP: VTBuilder ed Enviro. A partire dal Capitolo 4 si iniziano a descrivere
le funzionalità implementate tra cui gli algoritmi volti all’analisi ED AL
PROCESSAMENTO delle immagini e alla CONSEGUNETE generazione
degli elementi tridimensionali. Il Capitolo 5 si occupa di descrivere le
Marco Pergher
Tesi di Laurea Specialistica
Introduzione
11
principali funzionalità implementate UTILIZZADO LIBRERIE da applicativi
esterni quali OpenCV, MapPoint®e AppGPS, finalizzati rispettivamente
all’analisi di immagini, GEOREFEREZAZIONE DEGLI di edifici o luoghi di
particolare interesse e all’interfacciamento con dispositivi GPS. Il Capitolo
6 descrive quali sono i principali campi di impiego ove si può inserire
l’applicazione sviluppata. Infine, le conclusioni e le possibilità di sviluppo
futuro sono contenute nel Capitolo 7.
I marchi registrati citati nel presente documento sono proprietà dei
rispettivi depositari.
Marco Pergher
Tesi di Laurea Specialistica
Capitolo 2
Stato dell’Arte
Esistono numerosi applicativi in grado di processare informazioni e dati
GIS volti alla rappresentazione e visualizzazione 3D di ambienti territoriali.
Ciascuno di questi software presuppone un’adeguata acquisizione dei dati
finalizzata ad un corretto sviluppo di due principali categorie di modelli:
Modelli legati alla planimetria del territorio;
Modelli
rappresentanti
edifici, arredi
urbani
ed
oggetti
3D
direttamente visualizzabili sulla UNA mappa tridimensionale.
Il grado di precisione e di accurate zza con il quale viene acquisita e
processata
l’informazione
dipende
ovviamente
dalle
finalità
dell’applicazione. Esistono quindi differenti soluzioni adottate relative
all’acquisizione dei dati in input, le quali si avvalgono di dispositivi e
tecniche di elaborazione differenti a seconda della precisione richiesta
dall’utilizzatore del software.
È ovvio pensare che maggiore è la precisione del modello finale, e
maggiore è la mole di dati da processare, la quale, a sua volta, comporta
una corretta scelta degli strumenti atti all’elaborazione dei dati in input.
Esistono quindi di cosa se il discorso di prima è rimasto in area
applicazioni fruibili via web (es. Google Earth® ) ed applicazioni molto più
pesanti dal punto di vista computazionale che richiedono l’installazione di
librerie e database aventi elevate dimensioni (es. ArcGIS 3D Analyst®).
Marco Pergher
Tesi di Laurea Specialistica
Stato dell’arte
13
Questo capitolo si propone di descrivere brevemente quali sono le
principali tecniche di elaborazione dei dati GIS e le applicazioni volte alla
creazione e all’analisi di ambienti 3D
illustrandone
le principale
caratteristiche.
2.1
Tecniche per l’acquisizione e l’elaborazione
dei dati GIS
L’acquisizione dei dati ai finI della costruzione del modello geometrico
tridimensionale è una importante problematica che deve CONSIDERARE
DUE
ASPETTI FONDAMERNTALI LA
RISOLUZIONE
E
DELLA
MORFOLOGIA DEL TERRIOTORIO ED GLI ELEMENTI IN ESSO
CONTENUTI Tale operazione può essere effettuata mediante diverse
tecniche in funzione del grado di precisione richiesto per la ricostruzione
dei dati 3D.
Lo scopo di questa sezione è quello di descrivere quali sono le principali
tecniche utilizzate per la ricostruzione del rilievo e l’acquisizione dei dati
finalizzate alla realizzazione di un ambiente territoriale virtuale.
2.1.1 Tecnica a Laser Scanning
La tecnica a laser scanning si basa sul seguente principio di
funzionamento [8]: emesso un impulso laser, il tempo di restituzione
dell’eco viene trasformato in distanza rispetto al bersaglio.
Tale sistema può essere installato a
bordo di velivoli ed utilizzato per acquisire
il profilo altimetrico di una determinata
area compresi tutti gli elementi strutturali
e naturali presenti su un territorio.
Marco Pergher
Tesi di Laurea Specialistica
Stato dell’arte
14
Il risultato che si ottiene con l’utilizzo di questa tecnica è un INSIEME di
punti con un livello di dettaglio che può arrivare anche a 10 centimetri di
distanza tra due punti adiacenti.
Il problema principale consiste ora nel riconoscimento e nell’estrazione
degli oggetti tridimensionali presenti sulla superficie analizzata. A tal fine
vengono spesso utilizzate immagini CIR (Color InfraRed) per classificare
le zone occupate dai diversi elementi presenti sul territorio, per giungere,
attraverso le informazioni fornite dal laser scanning, alla ricostruzione degli
oggetti 3D [9].
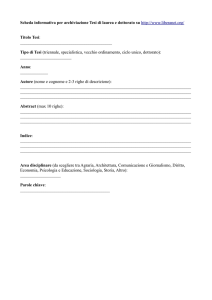
In dettaglio il procedimento è il seguente [10]:
Acquisizione dai dati di partenza:
o Digital Terrain Model (DTM) ricavato dalla scansione laser;
o Immagine CIR georeferenziata;
Figura 1: l’immagine a sinistra mostra un dettaglio relativo alla scansione laser
del territorio, mentre l’immagine a destra rappresenta un’ortofoto multispettrale
con canale infrarosso.
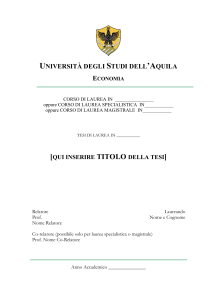
Elaborazione dell’ortofoto finalizzata alla classificazione dei diversi
elementi presenti sull’area di interesse:
Marco Pergher
Tesi di Laurea Specialistica
Stato dell’arte
15
Figura 2: L’elaborazione attraverso l’utilizzo del canale ad infrarossi permette di
riconoscere perfettament e il perimetro di edifici, alberi ed altri oggetti presenti sul
terreno.
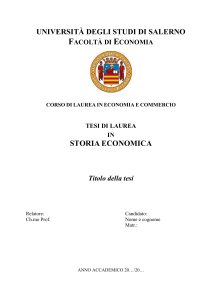
Applicazione
di
algoritmi
all’immagine
sopra
ottenuta
volti
all’inseguimento dei contorni per convertire il perimetro di ciascun
elemento in formato vettoriale [9]:
Figura 3: L’immagine viene ulteriormente processata al fine di ottenere un vettore
contenet e le coordinate del perimetro di ciascun oggetto 3D.
Utilizzando le altimetrie fornite dalla scansione laser, vengono
generati i modelli tridimensionali aventi come base di estrusione il
perimetro precedentemente calcolato [11]:
Marco Pergher
Tesi di Laurea Specialistica
Stato dell’arte
16
Figura 4: Le immagini mostrano le operazioni principali per generare un modello
tridimensionale di un edificio a partire da un’altimetria laser ad alta risoluzione e da
un’ortofoto.
Questo metodo di estrapolazione dei dati risulta essere molto efficiente in
presenza di planimetrie laser ed ortofoto ad alta risoluzione. Ad esempio,
una risoluzione spaziale di soli due metri non sarebbe sufficiente per poter
apprezzare i dettagli degli edifici visti nelle immagini sopra illustrate.
2.1.2 Impiego di immagini satellitari ed aeree ad alta
risoluzione
Le immagini satellitari ed aere ad alta risoluzione costituiscono
un’importante fonte informativa utilizzata sempre più frequentemente in
molteplici campi applicativi [8]. Grazie alla possibilità di distinguere a scala
metrica elementi presenti sul terreno quali edifici, alberi, ecc, è possibile
classificare e ricostruire tali oggetti in un ambiente tridimensionale.
Le tecniche ad analisi di immagine anche se consentono un buon
riconoscimento degli oggetti, devono essere necessariamente integrate da
atre informazioni per poter creare un’accurata planimetria 3D, quali:
profilo altimetrico del territorio (fornito ad esempio da scansione una
laser anche a bassa risoluzione);
altezza relativa di ogni elemento classificato nell’ortofoto e poi
presente sulla mappa.
Marco Pergher
Tesi di Laurea Specialistica
Stato dell’arte
17
Questa tecnica consente quindi di gestire una mole di dati minore rispetto
alla precedente, anche se il reperimento delle informazioni aggiuntive
sopra citate non sempre è fattibile perché .
Ottenuta la planimetria di un territorio, analizziamo quali sono i principali
passaggi per estrarre gli elementi 3D utilizzando soltanto le informazioni
disponibili nell’ortofoto [12]:
come per la tecnica precedente, si effettuata una segmentazione
dell’immagine per avere una prima classificazione degli oggetti da
rappresentare nella scena;
Applicazione di algoritmi per il riconoscimento dei contorni;
Ricostruzione dei segmenti finalizzata ad ottenere continuità nella
linee;
Estrusione del perimetro per ottenere l’oggetto tridimensionale.
Le immagini sottostanti mostrano i passi descritti:
Figura 5: Dall’ortofoto è possibile ric avare il perimet ro di ogni oggetto processando in
cascate l’immagine originale.
Le immagini ad alta risoluzione permettono inoltre di ricostruire l’esatta
morfologia dei tetti [12]. Questa tecnica necessita però di un’ulteriore
inseguimento di contorni anche all’interno dell’oggetto in esame dalla
quale si possono ricostruire quattro tipologie di tetti:
tettoia – terrazza;
Marco Pergher
Tesi di Laurea Specialistica
Stato dell’arte
18
tetto spiovente su un lato;
tetto spiovente su due lati;
tetto spiovente su quattro lati;
Un’informazione aggiuntiva molto importante riguarda l’altezza degli
oggetti
3D,
che
necessariamente
deve
essere
fornita
assieme
all’immagine satellitare o aerea. Tale parametro generalmente viene
fornito tramite cartografia o derivato dalla scansione laser come visto
precedentemente.
Generalmente in un ambiente 3D ove i valori geometrici vengono ricavati
utilizzando solamente l’informazione estrapolata dalle immagini, l’altezza
degli edifici e degli alberi rimano un parametro incognito, e quindi definiti
dall’utilizzatore.
L’immagine
sottostante
mostra
un
esempio
di
ricostruzione tridimensionale con l’ausilio della sola ortofoto:
Marco Pergher
Tesi di Laurea Specialistica
Stato dell’arte
19
2.1.3 Generazione
degli
elementi
tridimensionali da cartografia numerica
geometrici
La cartografia numerica è una strumento molto utilizzato, specialmente in
ambiente CAD, per visualizzare le caratteristiche 2D degli elementi su una
mappa, ad esempio: planimetria 2D di un edificio, area occupata,
perimetro visibile, ecc. Generalmente si possono avere numerosi formati
della mappe cartografiche, a seconda dello scopo cui è finalizzata la
rappresentazione grafica. Come visto per le sezioni precedenti, uno degli
obiettivi intermedi per la generazione degli oggetti tridimensionali presenti
sul territorio, consiste nell’estrazione dei contorni dell’ortofoto al fine di
ottenere il perimetro di ogni elemento in formato vettoriale. Risulta quindi
opportuno avere, come dato di partenza, una cartografia numerica in
formato vettoriale per applicare cosi una diretta conversione dei dati da 2D
a 3D [13].
Figura 6: dati cartografici relativi a Piazza Duomo Trento.
Marco Pergher
Tesi di Laurea Specialistica
Stato dell’arte
20
La
cartografia
numerica
proposta
si
presenta
nella
seguente
configurazione:
tutti i punti visualizzabili sulla mappa cartografica hanno coordinate
georeferenziate;
i punti interni agli edifici danno il valore dell’altezza degli edifici
stessi;
dati disponibili in formato vettoriale: DWG – DXF;
Analogamente a quanto descritto precedentemente, dal perimetro degli
elementi in formato vettoriale, si possono estrudere i vari oggetti
tridimensionali ed, in questo caso, è possibile ottenere facilmente l’altezza
a loro associata.
Utilizzando questa tecnica, la precisione del dato ricostruito nell’ambiente
3D è direttamente dipendete dalla scala e dalla risoluzione con cui sono
stati acquisiti i valori presenti nella cartografia numerica.
I risultati che si possono ottenere con questa tecnica sono i seguenti:
Figura 7: Le immagini mostrano come da una cartografia numerica sia possibile ric avare
un prospetto tridimensionale del territorio con inseriti oggetti 3D ai quali è possibile
assegnare colori, caratteristiche ed attributi differenti.
Riassumendo, le diverse tecniche di rilievo ed acquisizione dati
considerate sopra, consentono di ottenere le seguenti accuratezze [8]:
Nome tecnica
Marco Pergher
Accuratezza
Tesi di Laurea Specialistica
Stato dell’arte
Impiego di laser scanning
21
In condizioni normali:
accuratezza pari a 0,3 – 10 metri.
Impiego di immagini ad alta
L’accuratezza è funzione della
risoluzione
risoluzione delle immagini.
Generalmente utilizzando risoluzioni
elevate, l’accuratezza può variare
da 0,6 a 5 metri.
Derivazione da cartografia numerica L’accuratezza è funzione della scala
con la quale è disponibile la
cartografia.
Le più utilizzate sono:
per la scala 1:2000 si può
ottenere un’accuratezza che
varie dagli 80 ai 40 centimetri;
per la scala 1:1000 si può
ottenere un’accuratezza che
varie dai 40 ai 20 centimetri;
2.2
Applicativi Commerciali
Vediamo ora quali sono i principali software commerciali finalizzati
all’elaborazione dei dati GIS e alla loro visualizzazione tridimensionale. La
descrizione delle applicazioni è proposta in ordine di funzionalità
implementate, dalle caratteristiche standard alle più avanzate.
2.2.1 3DCarto®
3DCarto® è un’applicazione cartografica, finalizzata alla navigazione ed
alla localizzazione di uomini e mezzi, in tempo reale, su mappe
tridimensionali.
Questo software è composto da varie sezioni aventi ciascuna diverse
funzionalità [1]:
Marco Pergher
Tesi di Laurea Specialistica
Stato dell’arte
22
Costruzione di modelli tridimensionali di vaste aree di territorio a
partire da aerofotogrammetrie e misure altimetriche ad alta
definizione;
Importazione e georeferenziazione di modelli tridimensionali con la
possibilità di inserire nelle mappe dei modelli fotorealistici di edifici e
aree particolarmente significative;
Interrogazione di database vettoriali per la navigazione della rete
stradale;
Gestione della grafica tridimensionale;
Distribuzione in rete delle mappe tridimensionali.
I livelli di dettaglio delle ortofoto e dei DTM (Digital Terrain Model) utilizzati
per la generazione degli ambienti tridimensionali, sono opportunamente
impostati in modo automatico dall’applicazione attraverso un algoritmo di
riduzione dei poligoni, per consentire fluidità alla navigazione, garantendo
comunque il massimo grado di realismo.
Tale algoritmo viene applicato alla “griglia tridimensionale dei triangoli” TIN
(Triangulated Irregular Networks) determinanti la precisione morfologica
del terreno.
L’immagine sottostante evidenzia il diverso numero dei poligoni prima e
dopo l’applicazione dell’algoritmo sopra citato:
Figura 8: Le linee di colore grigio mostrano gli spigoli dei poligono prima dell’applicazione
dell’algoritmo, mentre le linee rosse individuano i poligoni dopo l’applicazione
Marco Pergher
Tesi di Laurea Specialistica
Stato dell’arte
23
dell’algoritmo. È evidente come il numero dei poligoni rossi sia nettamente inferiore a
quelli grigi.
La visualizzazione di ampie aree di territorio è resa possibile attraverso la
modularità e la gestione di diversi livelli di definizione. La modularità
consiste nella suddivisione dell’area totale in piccole aree quadrate di
identica dimensione in modo da gestire dinamicamente il raggio di
visualizzazione, limitando o ampliando a scelta l’area visibile.
Figura 9: Esempio di suddivisione in moduli. L’area verde identifica i moduli coinvolti nel
raggio di visione.
Il concetto di raggio di visione è maggiormente comprensibile quando si
introducono più livelli di definizione dell’ortofoto.
3DCarto® permette, infatti, una gestione dinamica dei livelli di definizione
durante la navigazione consentendo di ottimizzare sia l’occupazione di
memoria che la velocità di rendering [1]. L’utilizzo di questa tecnica
consente quindi di assegnare a diversi moduli, livelli di dettaglio della
texture differenti, come mostra l’immagine sottostante:
Marco Pergher
Tesi di Laurea Specialistica
Stato dell’arte
24
Figura 10: La parte di mappa pi ù vicina all’osservatore sarà alla massima definizione. Le
zone più lontane saranno di qualità più bassa, garantendo comunque una visualizzazione
ottimale.
L’applicazione presenta inoltre altre caratteristiche quali:
Possibilità di inserire nelle mappe modelli fotorealistici di edifici e
aree particolarmente significative, costruiti ad hoc o importati da
comuni CAD tridimensionali;
Georeferenziazione dei modelli 3D inseriti all’interno delle mappe;
Mappe tridimensionali integrabili da database vettoriali per la
navigazione della rete stradale.
Possibilità di cliccare su un punto della mappa per conoscerne
l’indirizzo. Viceversa, dato un indirizzo noto, è possibile individuarlo
facilmente sulla mappa 3D;
Possibilità di inserire collezioni di obiettivi da posizionare sulla
mappa.
3DCarto è studiato in particolare per la gestione di flotte. È possibile infatti
visualizzare sulla mappa mezzi radiolocalizzati e seguirne i movimenti in
tempo reale, oppure registrarne gli spostamenti per poi rivedere il percorso
effettuato.
Marco Pergher
Tesi di Laurea Specialistica
Stato dell’arte
25
Tale sistema consente, dunque, un’ampia gamma di applicazioni, tra cui
[2]:
Veloce pianificazione degli interventi nel caso di incidenti stradali:
Figura 11: Visualizzazione 3D e 2D della zona di intervento.
Pianificazione degli interventi nel caso di incendi o alluvioni;
Visualizzazione della rete stradale vettoriale sovrapposta alla
cartografia raster.
Visualizzazione dei pendii montani a rischio valanghe:
Marco Pergher
Tesi di Laurea Specialistica
Stato dell’arte
26
3DCarto® d’altro canto, presenta alcune limitazioni:
non consente un’analisi dettagliata dei dati, siano essi GIS che
importati dall’utilizzatore;
non consente l’editing sui dati geografici;
gestione ed interazione limitata con i metadata inseriti nella
scena.
2.2.2 Google Earth ®
Google Earth® è una recente applicazione fruibile via web che unisce la
visualizzazione tridimensionale del territorio e delle costruzioni con le
funzionalità di Google® e il browser di Google Maps ®. Utilizza una
tecnologia di streaming broad band e grafica tridimensionale, consentendo
agli utenti di navigare sulla superficie terrestre e di esplorare l’itero pianeta
[6].
Google Earth® è disponibile in più versioni: Free, Pro ed Enterprise,
ciascuna delle quali permette di gestire dati e funzionalità via via più
complesse.
La gestione dei dettagli relativi al DTM e all’ortofoto è del tutto analoga a
quanto descritto per 3DCarto ®, con la differenza che le informazioni sono
Marco Pergher
Tesi di Laurea Specialistica
Stato dell’arte
27
fornite direttamente dalla rete garantendo così un ottimo grado di
aggiornamento.
Le principale caratteristiche dell’applicazione sono:
riproduzione 3D dell’intera superficie terrestre;
posizionamento di edifici ed oggetti
3D nelle zone di maggior interesse;
possibilità di interrogare il sistema
per avere informazioni real-time su
determinate aree;
ricerca di edifici o punti di interesse
in un determinata area: ristoranti,
stazioni, monumenti, ecc;
memorizzazione di località specifiche;
sofisticata tecnologia streeming per il recupero dei dati dalla rete;
I risultati ottenibili da questa applicazione hanno un ottimo impatto visivo,
come mostra l’immagine sottostante:
Google Earth Pro® oltre alle funzionalità standard di visualizzazione di
scenari 3D, consente di personalizzare l’applicazione e di focalizzare le
sue funzionalità sull’attività svolta dall’utilizzatore. È possibile, per
esempio, integrare l’applicazione con un sistema GPS in grado di
Marco Pergher
Tesi di Laurea Specialistica
Stato dell’arte
28
localizzare mezzi appartenenti ad una flotta ed assegnare ad ogni veicolo
un preciso percorso urbano (analogmente a 3DCarto®).
Figura 12: È possibile interagire direttamente con il sistema selezionando una strada o un
edificio di particolare interesse per visualizzarne le informazioni principali.
Google Earth® può quindi diventare un’applicazione molto versatile pur
avendo alcune problematiche [7]:
la fluidità del sistema è fortemente influenzata dal tipo di
connessione utilizzato, infatti, con connessione a 56 kbps i tempi di
attesa divengono insostenibili;
non tutte le aree della superficie terrestre sono visualizzabili ad alta
risoluzione, infatti, per le zone non coperte dal sistema la
risoluzione è minore e permette soltanto di apprezzare gli
agglomerati urbani e le caratteristiche dei terreni, ma non edifici ed
oggetti tridimensionali.
2.2.3 ArcGIS®
Marco Pergher
Tesi di Laurea Specialistica
Stato dell’arte
29
ArcGIS® è un’applicazione tra le più utilizzate e più evolute sulla gestione
dei dati GIS. Tale software si propone come un tool si sviluppo per creare
soluzioni specifiche nell’ambito della gestione del territorio in generale [3].
Consente un’elevata interazione con gli oggetti inseriti e presenta ottime
capacità di relazionare dati spaziali per ottenere un elevato dettaglio del
modello tridimensionale del terreno.
ArcGIS®, oltre alle caratteristiche standard
delle comuni applicazioni che operano su
dati GIS, consente di visualizzare sulla
mappa una vastissima gamma di dati,
anche sottoforma di grafici tridimensionali
[4].
Le principali funzionalità di questa applicazione sono [5]:
creazione di modelli tridimensionali utilizzabili nelle mappe;
navigazione e prospettiva della scena completamente interattiva e
personalizzabile;
visualizzazione dei dati secondo prospettiva globale e locale;
navigazione con terreno ed ortofoto a multirisoluzione;
analisi e visualizzazione di grandi quantità di dati (terabytes);
estrusione di oggetti 2D attraverso
la lettura di specifici attributi sui
dati;
modellazione di elementi strutturali
nel sottosuolo o sottacqua;
calcolo di: superfici di aree, volumi
occupati da oggetti, inclinazione di
pendii, aspetto del territorio ed ombreggiature;
consultazione di database al fine di ottenere informazioni specifiche
relative a particolari oggetti inseriti nello scenario oppure a
determinati luoghi;
Marco Pergher
Tesi di Laurea Specialistica
Stato dell’arte
30
costruzione di modelli con l’utilizzo di ModelBuilder™ ed analisi dei
risultati tridimensionali;
creazione di simboli tridimensionali e di textures ad alta definizione
al fine di ottenere un elevato realismo;
creazione di oggetti animati all’interno della scena;
possibilità di salvare le animazioni in diversi formati, quali: MPEG,
AVI e QuickTime®;
generazione delle superfici attraverso tecniche TIN (Triangulated
Irregular Networks) o interpolazione raster.
ArcGIS® è quindi uno strumento molto
potente per la gestione dei dati GIS in
generale.
È possibile inoltre, integrare le funzionalità
sopra elencate con ulteriori caratteristiche
finalizzate a scopi più specifici come, per
esempio, la gestione e l’analisi di una rete stradale. ArcGIS Network
Analyst® consente, infatti, di salvare percorsi, visualizzare zone con
particolari restrizioni alla circolazione oppure simulare le condizioni di
traffico in una determinata area.
Le soluzioni proposte da ArcGIS ® sono
molteplici e spaziano dal traking di veicoli
o animali per finire all’analisi di un
territorio sotto l’aspetto del business e del
marketing. Ciascuna di queste peculiarità
viene
implementata
dall’applicazione
molto dettagliatamente al fine di ottenere ottimi risultati.
Marco Pergher
Tesi di Laurea Specialistica
Capitolo 3
L’ambiente VTP
VTP (Virtual Terrain Project), è un sistema composto da più applicazioni
open-source sviluppate in C++ che permettono l’elaborazione di DTM e
ortofoto georeferenziati allo scopo di ottenere ambienti tridimensionali
virtuali.
L’importanza di avere una rappresentazione 3D della superficie terrestre,
è divenuta oggi un valore aggiunto indispensabile in molteplici settori di
impiego. I principali campi applicativi di questo software sono [14]:
pianificazione di viaggi e turismo virtuale;
supporto didattico alla geofisica;
pianificazione per l’uso del territorio in aree urbane;
visualizzazione tridimensionale di infrastrutture civile;
visualizzazione di previsioni meteorologiche sul territorio;
intrattenimento e giochi;
pianificazione posizionamento sul territorio di dispositivi emittenti
segnali radio;
pianificazione di interventi militari.
VTP è quindi da considerarsi una piattaforma di base per lo sviluppo di
molte applicazioni volte a risolvere differenti problematiche. Il paragrafo
sottostante, mostra le funzionalità base implementare da questo software.
Marco Pergher
Tesi di Laurea Specialistica
L’ambiente VTP
32
3.1
VTP: funzionalità base
Il progetto VTP è composto principalmente da due applicativi:
VTBuilder;
Enviro.
Queste due applicazioni sono finalizzate, rispettivamente, alla gestione dei
dati GIS in due dimensioni ed alla loro visione tridimensionale. Le sezioni
sottostanti evidenziano quali sono le principali operazioni da effettuare sui
due software, per ottenere un ambiente tridimensionale virtuale.
3.1.1 VTBuilder
VTBuilder, come detto precedentemente, è un software che consente di
elaborare dati GIS georeferenziati e, contemporaneamente, avere una
loro rappresentazione in due dimensioni. L’applicazione permette di
importare una vasta gamma di configurazioni di dati al fine di poter
rappresentare:
profilo altimetrico del terreno;
ortofoto associata al terreno considerato;
infrastrutture;
mappa stradale;
vegetazione;
mappa fluviale;
VTBuilder suddivide
le tipologie di dati
sopra
citate,
diversi
layer
permettendo
una
in
così
differente
elaborazione
per
ogni categoria.
Marco Pergher
Tesi di Laurea Specialistica
L’ambiente VTP
33
Di seguito sono riportate le operazioni base effettuabili da VTBuilder.
1. Inserimento del DTM
La
prima
operazione
da
effettuare
per
la
ricostruzione
tridimensionale di un territorio, consiste nell’importazione del profilo
altimetrico all’interno del layer Elevation di VTBuilder:
Figura 13: L’immagine mostra come diverse tipologie di dati (nell’esempio bt file)
vengano inseriti automaticamente all’intermo del layer appropriato. La mappa,
inoltre, assume diverse colorazioni in funzione dell’altezza del territorio.
Solitamente, il tipo file BT è il risultato di una conversione
precedente, effettuata a partire da un profilo altimetrico in formato
ASCII,
dal
quale
è
possibile
estrapolare
la
corretta
georeferenziazione del territorio in esame. L’immagine precedente
evidenzia come, spostandosi con il mouse all’interno della mappa,
siano possibili ottenere coordinate geografiche ed altezza di ogni
punto della superficie terrestre.
Marco Pergher
Tesi di Laurea Specialistica
L’ambiente VTP
34
Ogni DTM inserito viene, inoltre, opportunamente posizionato
all’interno di una mappa cartografica mondiale, al fine di avere un
riferimento visivo del territorio considerato:
Figura 14: L’immagine mostra la corretta collocazione all’interno della mappa
terrestre della località considerata, in questo caso Baselga di Piné.
2. Sovrapposizione dell’ortofoto
Posizionata
l’altimetria
del territorio,
l’operazione
successiva
consiste nel corretto posizionamento dell’ortofoto corrispondente.
Come descritto precedentemente, l’immagine da sovrapporre alla
superficie, andrà ad inserirsi automaticamente nel layer dedicato, al
momento della sua importazione nell’applicazione.
OVVIAMNENTE Le immagini devono avere un unico importante
requisito: ciascuna ortofoto deve essere georeferenziata.
Generalmente, per questo scopo, vengono utilizzate foto aeree o
satellitari esportate in formato tif, opportunamente allegate ad un
file testuale di tipo tfw contenente le informazioni necessarie per la
georeferenziazione.
Le informazioni principali relative ai dati geografici generalmente
sono [16]:
Marco Pergher
Tesi di Laurea Specialistica
L’ambiente VTP
35
le coordinate di uno degli angoli dell’immagine (origine
cartesiana);
il verso degli assi cartesiani, descritto generalmente con le
coordinate assolute o relative di un altro punto definito
dell’immagine;
il passo dei pixel.
Nel dettaglio,il file tfw contiene le seguenti informazioni (esempio)
[15]:
1,0000
Metri quadrati occupati da ciascun pixel
0,0000
Gradi per la rotazione orario dell’immagine
0,0000
Distanza di disallineamento
Metri quadrati occupati da ciascun pixel (con
-1,0000
segno negativo)
1660960,5000
5107399,5000
Coordinate assolute est e nord del pixel in
alto a sinistra dell’ortofoto considerata
Grazie all’utilizzo di queste informazioni, è possibile posizionare
l’ortofoto nella corretta area all’interno della mappa terrestre sopra
citata.
Il
valore,
quindi,
delle
coppie
di
coordinate
appartenente
dell’immagine georeferenziata sarà:
x = 1,0000 * nColonne + 0.0 * nRighe + 1660960.5000
y = (-1,0000) * nRighe + 0.0 * nColonne + 5107399.5000
Marco Pergher
Tesi di Laurea Specialistica
L’ambiente VTP
36
Ove nColonne e nRighe corrispondono rispettivamente al numero
di colonne ed al numero di righe dell’ortofoto.
Al fine di ottenere un risultato soddisfacente, la zona di interesse
occupata dal DTM (profilo altimetrico), deve essere perfettamente
sovrapposta
alla
porzione
di
superficie
terrestre
coperta
dall’ortofoto:
Figura 15: L’immagine a sinistra mostra una perfetta sovrapposizione tra DTM ed
ortofoto. Ment re la parte destra evidenzia una porzione di superficie non coperta
dall’immagine e quindi non correttamente utilizzabile nella fase di visualizzazione
tridimensionale.
3. Ridimensionamento Layers
VTBuilder permette di ridimensionare e ricampionare i layers
Elavation ed Images al fine di
focalizzare le operazioni da
effettuare
su
una
località
specifica. È possibile eseguire
queste
operazioni
per
via
grafica, selezionando la zona
da isolare del resto del DTM
attraverso la funzione Area tool.
L’applicazione consente, inoltre, di verificare l’este nsione della
nuova area attraverso il valore delle coordinate dei vertici estremi.
In ambiente GIS, infatti, è usuale fornire quattro valori per
determinare l’estensione occupata da una superficie regolare:
North: coordinata estrema nord appartenente all’area.
South: coordinata estrema sud appartenente all’area.
Marco Pergher
Tesi di Laurea Specialistica
L’ambiente VTP
37
West: coordinata estrema ovest appartenente all’area.
East: coordinata estrema est appartenente all’area.
Graficamente il significato di questi parametri è il seguente:
Figura 16: I valori North, South ed Eats, West corrispondono alle relative distanze
tra l’area in esame con l’E quat ore ed il meridiano cent rale di tangenza del fuso al
quale appartiene l’area in esame.
Tali valori assumono un significato fisico di particolare interesse se
la georeferenziazione dei dati e il loro posizionamento all’interno di
ciascun layers sono stati effettuati correttamente (vedi punti 1 e 2).
L’immagine sottostante mostra il valori dei parametri sopra descritti
per la zona evidenziata:
Figura 17: P er ciascuna superficie regolare selezionata, l’applicazione determina
automaticamente i valori d’estensione geografica.
Marco Pergher
Tesi di Laurea Specialistica
L’ambiente VTP
38
L’operazione di selezione dell’area da elaborare è seguita dal
ricampionamento e dalla conseguente estrazione del DTM e
dell’immagine considerati. Tale operazione permette di ridurre a
piacere le dimensioni di DTM e ortofoto.
Il RICAMPIONAMENTO dell’ortofoto consiste in un semplice
ridimensionamento dell’immagine pur mantenendo le informazioni
relative alla georeferenziazione. Il profilo altimetrico del terreno,
invece, riduce le sue dimensioni grazie ad un sottocampionamento
dei punti formanti la griglia di elevazione:
Figura 18: Le due immagini rappresentano lo stesso territorio avente diverse
griglie di elevazione: nel primo caso m olto rada, mentre nel secondo molto fitta.
Si nota che nell’immagine a destra, è possibile apprezzare sensibilmente la
morfologia del terreno.
Questo comporta ovviamente una riduzione della risoluzione di
immagine e DTM.
4. Caricamento extra layers
VTBuilder, oltre al caricamento di immagini e file di tipo raster,
permette
l’importazione
di
formati
vettoriali,
adatti
alla
rappresentazione di strade e perimetri di strutture architettoniche.
Analogamente a quanto descritto precedentemente, per ogni
oggetto inserito nell’applicazione, esiste un layer corrispettivo, che
sarà poi esportato insieme a tutti i sui componenti, per essere
visualizzato all’interno dell’ambiente tridimensionale di Enviro.
L’immagine sottostante mostra l’inserimento nell’applicazione di
Marco Pergher
Tesi di Laurea Specialistica
L’ambiente VTP
39
due diversi layers adibiti alla rappresentazione della rete stradale e
di strutture abitative:
Figura 19: L’immagine mostra l’inserimento di due tipologie di files: uno volto alla
generazione della rete stradale, l’altro alla rappresentazione degli edifici.
Analizzando nel dettaglio i dati inseriti nei layer Structures e Roads,
si nota che il dato è presente in forma vettoriale e rispetta la sintassi
xml:
<Building>
<Level FloorHeight="1.243073" StoryCount="1">
<Footprint>
<gml:MultiPolygon>
<gml:polygonMember>
<gml:Polygon>
<gml:outerBoundaryIs>
<gml:LinearRing>
<gml:coordinates>
241692.09,2221885.61, 241702.09,2221885.61
241702.09,2221895.61, 241692.09,2221895.61
</gml:coordinates>
</gml:LinearRing>
</gml:outerBoundaryIs>
</gml:Polygon>
</gml:polygonMember>
</gml:MultiPolygon>
</Footprint>
<Edge Material="Cement" Color="ffffff">
<EdgeElement Type="Wall"/>
</Edge>
<Edge Material="Cement" Color="ffffff">
<EdgeElement Type="Wall"/>
</Edge>
<Edge Material="Cement" Color="ffffff">
<EdgeElement Type="Wall"/>
</Edge>
<Edge Material="Cement" Color="ffffff">
<EdgeElement Type="Wall"/>
</Edge>
</Level>
Marco Pergher
Tesi di Laurea Specialistica
L’ambiente VTP
40
Il codice si divide in due parti:
la prima parte (di colore blu), descrive la tipologia del dato da
rappresentare, in questo caso una spezzata formante un
poligono,
con
le
coordinate
georeferenziate
che
caratterizzano i nodi della polylinea;
la seconda parte (di colore verde) si riferisce al materiale da
applicare alla struttura, una volta esportata nell’ambiente
tridimensionale.
La mappa stradale è suddivisa, a sua volta, in tre diverse tipologie
di strade a seconda della loro dimensione:
Figura 20: L’immagine mostra chiaramente il formato vettoriali dei dati relativi sia
la mappa stradale, sia gli edifici.
La sezione successiva mostra come tutti gli elementi contenuti nei
diversi
layers
menzionati,
vengano
visualizzati,
grazie
all’applicazione Enviro, sottoforma di oggetti 3D.
3.1.2 Enviro
Enviro
è
un’applicazione
tridimensionali
virtuali.
che
Infatti,
permette
attraverso
di
visualizzare
l’esportazione
ambienti
dei
dati
precedentemente elaborati con VTBuilder, è possibile ottenere un sistema
runtime di navigazione 3D.
Marco Pergher
Tesi di Laurea Specialistica
L’ambiente VTP
Esiste un solo
41
vincolo per poter rappresentare i dati all’interno
dell’ambiente tridimensionale sopra descritto: i files in input ad Enviro
devono essere catalogati all’interno di determinate cartelle.
Le operazioni base che consentono di realizzare quanto descritto,
coinvolgono quindi i punti precedentemente analizzati nel paragrafo
VTBuilder, per concludere con i passi seguenti.
5. Gestione dei dati in input ad Enviro
I dati in input all’applicazione devono essere catalogati nelle
seguenti cartelle:
Data
│
│
│ → BuildingData:
contiene i dati relativi le planimetrie
│
degli edifici elaborate da VTBuilder;
│
│ → BuildingModels:
contiene le textures da applicare agli
│
edifici una volta importati nell’ambiente
│
3D;
│
│ → Culture:
contiene textures ed oggetti 3D in
│
formato 3ds inseribili in tempo reale
│
sul territorio;
│
│ → Elevation:
è una cartella essenziale al fine della
│
rappresentazione
│
una superficie. Essa contiene il profilo
│
altimetrico, in formato bt, della zona da
│
visualizzare;
Marco Pergher
tridimensionale
di
Tesi di Laurea Specialistica
L’ambiente VTP
42
│ → GeoSpecific:
contiene
l’ortofoto
della
regione
│
considerata, da sovrapporre al DTM;
│
│ → GeoTypical:
contiene le textures relative il manto
│
stradale;
│
│ → Location:
contiene le coordinate geografiche di
│
doversi punti di vista all’interno del
│
territorio 3D (vedi punto successivo);
│
│ → PlantData:
contiene le informazioni relative la
│
tipologia di vegetazione presente nella
│
regione considerata;
│
│ → PlantModels:
contiene le textures di ogni specie
│
vegetale che è possibile rappresentare
│
nell’ambiente 3D;
│
│ → RoadData:
come già descritto precedentemente,
│
questa cartella contiene il file il formato
│
vettoriale della mappa stradale del
│
territorio considerato;
│
│ → Sky:
contiene la texture raffigurante il cielo;
│
│ → Terrains:
è una cartella essenziale che contiene
un archivio xml ove sono inseriti tutti i
files, sopra citati, che l’applicazione
deve caricare all’avvio per ottenere
una
corretta
rappresentazione
dell’ambiente tridimensionale.
Marco Pergher
Tesi di Laurea Specialistica
L’ambiente VTP
43
6. Rappresentazione tridimensionale del territorio
La prima operazione eseguita dall’applicazione Enviro, consiste nel
caricamento
del file xml menzionato
precedentemente. Nel
dettaglio, questo file contiene le istruzioni che permetto di
assegnare a ciascun elemento 3D da visualizzare nell’ambiente, il
file corrispondente ai dati che caratterizzano l’oggetto stesso. Ad
esempio, per consentire il caricamento del profilo altimetrico del
terreno e della relativa ortofoto, le istruzioni sono le seguenti:
<Name>BaselgaDiPine</Name>
<Filename>Baselga_1025.bt</Filename>
<Texture>1</Texture>
<Num_Tiles>4</Num_Tiles>
<Tile_Size>2048</Tile_Size>
<Single_Texture>baselga.png</Single_Texture>
<Base_Texture>baselga_</Base_Texture>
<Texture_Format>1</Texture_Format>
I due file Baselga_1025.bt e baselga.png devono essere contenuti
all’interno delle rispettive cartelle, come descritto precedentemente.
Il risultato che si ottiene è il seguente:
Figura 21: L’immagine mostra la rappresentazione di DTM, ort ofoto e texture del
cielo all’interno dell’ambient e 3D.
Marco Pergher
Tesi di Laurea Specialistica
L’ambiente VTP
44
L’applicazione consente una gestione automatica del livello di
dettaglio in funzione della distanza relativa tra il punto di
osservazione e
la superficie del territorio. Tale metodo è
implementato da un preciso algoritmo e prende il nome di Level of
Detail Algorithm (LOD) [17]:
Figura 21: L’immagine evidenzia come il reticolo nella zona rossa sia nettamente
più fitto rispetto a quello cont rassegnato nella zona verde. L’algoritmo di LOD
consente, infatti, di aument are o diminuire i punti formanti la mesh della
planimetria in funzione della distanza dal punto di osservazione.
Analogamente a quanto descritto per DTM ed ortofoto, altri dati
come la mappa stradale e gli edifici, sono caricato attraverso il file
xml nel seguente modo:
<Roads>true</Roads>
<Road_File>road_baselga.rmf</Road_File>
<Highway>true</Highway>
<Paved>true</Paved>
<Dirt>false</Dirt>
<Road_Height>2.000000</Road_Height>
<Road_Distance>20.000000</Road_Distance>
<Road_Texture>true</Road_Texture>
<Road_Culture>false</Road_Culture>
<Type>Structure</Type>
<Filename>edifici.vtst</Filename>
<Visible>true</Visible>
Il risultato che si ottiene è il seguente:
Marco Pergher
Tesi di Laurea Specialistica
L’ambiente VTP
45
Figura 22: L’immagine mostra l’inserimento in Enviro della mappa stradale e degli
edifici.
L’applicazione Enviro consente, inoltre, altre funzionalità quali:
salvare posizione ed orientamento della camera in modo tale
da poter caricare punti di vista o paesaggi particolarmente
interessanti. Tali coordinate vengono memorizzate in file loc
all’interno della cartella Locations sopra citata;
inserire oggetti tridimensionali direttamente nell’ambiente 3D
come alberi o tralicci:
Le caratteristiche di questi elementi 3D, quali textures e
geometria,
sono
contenute
all’interno
delle
cartelle
precedentemente descritte;
Marco Pergher
Tesi di Laurea Specialistica
L’ambiente VTP
46
calcolare distanze e dislivelli all’interno del territorio 3D,
consentendo, in tal modo, di avere una visione prospettica
della zona da sezionare. Infatti, la sezione di una regione
effettuata in modo tradizionale su una mappa in due
dimensioni, non consente di avere una rappresentazione
tridimensionale del territorio e quindi non permette di
conoscere a priori la morfologia della superficie sulla quale
viene effettuata la misurazione. Utilizzando un’applicazione
di questo tipo è possibile, invece, effettuare i rilievi
direttamente nell’ambiente tridimensionale:
Figura 23: L’immagine mostra la stessa misurazione effettuata con E nviro
(in alto) e poi con V TBuilder (sotto). La precisione con la quale vengono
elaborati i dati è la stessa in entrambe i casi, dipendendo direttamente
dal DTM.
3.2
Limiti del sistema
VTBuilder ed Enviro, come visto nei paragrafi precedenti, permettono una
buona gestione ed elaborazione dei dati GIS cartografici pur avendo, però,
alcune restrizioni:
Marco Pergher
Tesi di Laurea Specialistica
L’ambiente VTP
Il
47
profilo
altimetrico
del
terreno
deve
rappresentare
necessariamente una regione di forma quadrata. Questa
limitazione non permette, per esempio, la rappresentazione
di una regione definita entro determinati confini:
Figura 24: la zona descritta dall’immagine a destra non può essere
rappresentata all’int erno dell’ambiente t ridimensionale, se non
considerando la porzione di superficie quadrat a che circoscrive la regione
in esame.
Il rendering della scena 3D viene effettuato sull’intero DTM,
trascurando il punto di
osservazione
della
camera. Questo limita
notevolmente
le
prestazioni del sistema,
in quando si potrebbe
omettere dal rendering
la
planimetria
non
visibile.
La dimensione delle ortofoto da sovrapporre al profilo
altimetrico del terreno non può superare la risoluzione
massima di 8000x8000 pixel. Questo limita fortemente la
definizione dell’immagine una volta inserita nell’ambiente
tridimensionale. Infatti, per avere una risoluzione accettabile
Marco Pergher
Tesi di Laurea Specialistica
L’ambiente VTP
48
dell’ortofoto, si deve diminuire la superficie da caricare in
Enviro:
Figura 25: A seconda dell’estensione della superficie planimetrica, si
possono apprezzare diversi livelli di dettaglio. L’immagine a sinistra è
sovrapposta ad una superficie più estesa rispetta all’immagine a destra.
Marco Pergher
Tesi di Laurea Specialistica
Capitolo 4
Analisi delle immagini e generazione degli
oggetti 3D
Questo capitolo descrive quali sono i principali componenti sviluppati
all’interno
dell’applicazione
Enviro,
finalizzati
alla
rappresentazione
tridimensionale delle informazioni GIS ed al supporto decisionale.
L’idea di base può essere sintetizzata con il seguente schema:
Marco Pergher
Tesi di Laurea Specialistica
50
Analisi delle immagini e generazione degli oggetti 3D
Le funzionalità avanzate evidenziate nel grafico, permettono di estrarre e
manipolare, direttamente dall’applicazione Enviro, i dati GIS. Questo
consente di ottenere un sistema completamente innovativo in grado di far
interagire utilizzatore e dati direttamente per via grafica.
I macroblocchi principali sono:
Elaborazione / Estrazione caratteristiche:
Viene applicato sia all’output di Enviro sia ai dati cartografici. Nel
primo caso consente di estrarre le informazioni di interesse relative
a DTM ed ortofoto al fine di memorizzarle all’interno di strutture dati
create ad hoc. Nel secondo caso, viene effettuato un parsing dei
dati cartografici al fine di renderli compatibili con il sistema.
Classificazione elementi:
Consente di classificare i dati estratti precedentemente all’interno di
diverse categorie di appartenenza, ad esempio:
Edifici
-
Abitazioni
-
Stabili per attività produttive
-
ecc..
Vegetazione
-
Pino
-
Quercia
-
ecc…
Arredi urbani
-
…
Questi dati possono essere esportati dal sistema per stimare una
vasta gamma di statistiche, ad esempio:
Marco Pergher
Città di Trento
-
Abitazioni:
23473
-
Stabili per attività produttive:
1034
-
ecc…
…
Tesi di Laurea Specialistica
Analisi delle immagini e generazione degli oggetti 3D
51
Simulazione:
Utilizzando requisiti e specifiche ben precise, è possibile effettuare
simulazioni sui dati, rendendo visibili i risultati direttamente
nell’ambiente tridimensionale oppure esportandoli in molteplici
formati di dati.
Elaborazione geometria tridimensionale:
Quest’ultimo macroblocco consente di elaborare i dati provenienti
dall’ortofoto o dalla cartografia e di generare la geometria che dovrà
essere successivamente visualizzata nell’applicazione.
È possibile importare, inoltre, oggetti di tipo 3DS per essere inseriti
e visualizzati direttamente nella scena tridimensionale.
La nuova applicazione diviene quindi un ottimo strumento di base per
simulazioni volte al supporto decisionale per interventi sul territorio,
applicati ad una vasta gamma di impieghi.
Le sezioni sottostanti descrivono come a partire dall’analisi delle immagini
siano possibili elaborare dati aggregati che possono essere processati per
ottenere informazioni aggiuntive rispetto al semplice dato GIS.
4.1
Analisi delle immagini
L’analisi ed il filtraggio delle ortofoto sono strumenti molto utilizzati per
ottenere o isolare informazioni contenute all’interno delle immagini. Come
già accennato in precedenza, all’aumentare della risoluzione dell’ortofoto
aumenta di conseguenza la precisione dal dato in uscita dal sistema
assieme all’informazione che verrà processata ai fine della simulazione.
L’applicazione sviluppata consente di elaborare direttamente all’interno
dell’ambiente tridimensionale una vasta gamma di filtri applicabili
all’ortofoto a subito sovrapponibili alla planimetria del territorio in esame. È
possibile inoltre limitare l’analisi dell’immagine a porzioni di territorio,
direttamente selezionabili dalla scena 3D, al fine di focalizzare in una
precisa località un possibile intervento.
Marco Pergher
Tesi di Laurea Specialistica
52
Analisi delle immagini e generazione degli oggetti 3D
Lo schema base che descrive il processo di elaborazione delle immagini è
il seguente:
Vediamo ora nel dettaglio alcuni esempi di filtri implementati.
1 Filtri base
Avviato il sistema, l’applicazione visualizza la planimetria con la relativa
ortofoto sovrapposta, contenute all’interno della cartella Data (vedi
Capitolo 3):
Figura 26: l’immagine mostra una veduta dall’alto di Riva del Garda.
Marco Pergher
Tesi di Laurea Specialistica
Analisi delle immagini e generazione degli oggetti 3D
53
Selezionando il filtro opportuno dal menù Navigation, è possibile
distinguere all’interno della mappa le diverse abitazioni conferendo loro
un colore rosso facilmente distinguibile rispetto agli altri elementi nella
foto:
Figura 27: Questo filtro consente di classificare facilmente zone urbane da
vegetazione con una buona precisione.
Elaborando successivamente questi dati si possono ottenere mappe
utili, ad esempio, per revisionare o modificare piani catastali in una
precisa località:
Figura 28: l’immagine evidenzia la distinzione tramite colorazione di aree
appartenenti a classi differenti. Si può notare, inoltre, che l’elaborazione dell’ortofoto
viene applicata solamente in una selezione precedentemente effettuata dall’utente.
Marco Pergher
Tesi di Laurea Specialistica
54
Analisi delle immagini e generazione degli oggetti 3D
In questo caso dalla segmentazione si ottengono delle aree aventi
diverse colorazioni, appartenenti ciascuna a determinate classi:
rosso:
area urbana
giallo:
area agricola
verde scuro:
area boschiva
verde chiaro:
prati
La gamma di filtri applicabile all’immagine da sovrapporre alla
planimetria del territorio è molto vasta e personalizzabile a seconda
dello scopo dell’utilizzatore.
2 Elaborazione congiunta ortofoto – dati
Questa seconda tipologia di elaborazione, consente di creare ortofoto
a partire dai dati disponibili nell’applicazioni. Ad esempio, avvalendosi
del profilo altimetrico del terreno è possibile generare immagini che
evidenziano, con diversi colori, le variazioni di quota:
Figura 29: L’immagine mostra olt re che t utti gli elementi presenti sulla superficie della
planimetria, l’elevazione del terreno attraverso curve di livello.
In generale, per la generazione delle ortofoto da sovrapporre alla
planimetria del territorio in esame, è possibile usufruire: di dati
contenuti in appositi files, oppure delle informazioni provenienti da altre
immagini:
Marco Pergher
Tesi di Laurea Specialistica
Analisi delle immagini e generazione degli oggetti 3D
55
Figura 30: I dati importati da file, rappresentano, in genere, la cartografia numerica e
quindi archivi di tipo shape, dwg o dxf.
Ad esempio, utilizzando le informazioni relative ai venti presenti
nell’alto Garda, è possibile visualizzare nell’ambiente tridimensionale le
caratteristiche di tali fenomeni:
Figura 31: le frecce si riferiscono alle direzioni dei diversi venti. Le colorazioni
identificano rispettivamente i seguenti venti: rosso – Ora, blu – Balì e verde – Peler.
È possibile,inoltre, sovrapporre più ortofoto alla planimetria al fine di
incrementarne
il
contenuto
informativo; ad esempio, utilizzando
un’ortofoto
semplice
tradizionale
cartina
con
topografica
una
si
ottiene come risultato l’unione di più
informazioni.
Marco Pergher
Tesi di Laurea Specialistica
56
Analisi delle immagini e generazione degli oggetti 3D
L’utilizzo
di
immagini
termografiche è un tipico esempio
di
informazione
direttamente
acquisita
da
una
foto.
Nell’immagine a fianco si possono
notare le diverse colorazioni del
lago di Garda in funzione della
temperatura
dell’acqua
in
superficie. Tale immagine può
essere
elaborata
nell’applicazione
ed
inserita
per
essere
visualizzata all’interno della scena
tridimensionale.
Aggregare e visualizzare diversi
contenuti informativi con facilità è
quindi, un notevole punto di forza
di questa nuova applicazione.
Le sezioni sottostanti mostrano come ottenere geometrie tridimensionali
dall’analisi delle immagini.
4.2
Generazione degli edifici attraverso l’analisi
dell’ortofoto
Uno degli obiettivi principali di questo LAVORO DI TESI consiste
nell’estrazione degli attributi relativi ai diversi oggetti rappresentati nelle
ortofoto, al fine di realizzare elementi tridimensionali che si possano
visualizzare direttamente all’interno della scena 3D. In particolare, questa
sezione descrive come avviene il processo di elaborazione che porta
all’ottenimento degli edifici 3D inseriti nell’ambiente virtuale.
È possibile rappresentare tale problematica con il seguente schema:
Marco Pergher
Tesi di Laurea Specialistica
Analisi delle immagini e generazione degli oggetti 3D
57
Analizziamo nel dettaglio i vari blocchi:
Segmentazione zone urbane
La prima operazione che viene effettuata sull’ortofoto consiste
nell’estrazione delle zone
urbane. Questa operazione
viene
effettuata per focalizzare maggiormente le successive elaborazioni
e quindi ottenere un risultato più soddisfacente.
La segmentazione ha il compito di eliminare dall’immagine tutto ciò
che non rappresenti edifici al fine di ottenere il seguente risultato:
Figura 32: Il risultato della segmentazione è legato direttamente alla risoluzione
dell’immagine.
Marco Pergher
Tesi di Laurea Specialistica
58
Analisi delle immagini e generazione degli oggetti 3D
Le zone contraddistinte dalle gradazioni giallo-rosso identificano le
aree occupate dagli edifici che verranno considerate nei punti
successivi. Le restanti regioni verdi, come già accennato, saranno
omesse dalle elaborazioni successive.
Acquisizione attributi edifici
Nelle zone di interesse, viene ora applicato un filtro che ha il
compito di sovrapporre ad ogni edificio l’ellisse che meglio
approssima la planimetria di ciascun fabbricato [18]. Per migliorare
la comprensione del processo descritto esaminiamo le immagini
sottostanti.
A partire dall’ortofoto in alto,
viene
effettuata
la
segmentazione sopra descritta
per
ottenere
l’immagine
al
centro.
Nella terza immagine si nota
come
ogni
edificio
viene
mappato da un’ellisse inscritta
nella relativa planimetria. Come
già citato in precedenza, le aree
presenti
nella
immagine
seconda
contraddistinte
dal
colore verde, vengono escluse
da questa elaborazione. Prati ed
alberi
mappati
non
da
vengono
quindi
nessuna
ellisse.
Tuttavia, la presenza di altri
elementi all’interno dell’ortofoto può portare all’individuazione di
oggetti mappati da ellissi pur non essendo edifici (vedi auto
nell’immaine sopra). Per ovviare a questi casi, vengono escluse
dall’inserimento all’interno della struttura dati, tutte le ellissi aventi
Marco Pergher
Tesi di Laurea Specialistica
Analisi delle immagini e generazione degli oggetti 3D
asse
maggiore
dimensionamento
al
di
di
tale
sotto
di
soglia
una
è
59
soglia
prefissata.
strettamente
legato
Il
alla
risoluzione dell’ortofoto.
Questo processo viene eseguito per memorizzare all’interno della
struttura
dati
sopra
citata,
la
posizione,
le
dimensioni
e
l’orientamento dei vari edifici. Questo spiega la scelta della
geometria ellittica per l’individuazione dei diversi fabbricati:
Figura 33: I paramet ri: asse maggiore, asse minore, centro ed inclinazione
rappresentano gli attributi che identificano ciascun edificio all’interno della
struttura dati.
Creazione struttura dati – salvataggio attributi, riscalamento e
posizionamento dell’oggetto 3DS
Attraverso l’operazione di filtraggio precedente, vengono generati,
quindi, vari attributi che descrivono le caratteristiche di ciascuna
ellisse. Questi valori vengono ora memorizzati all’interno di una
struttura dati creata ad hoc avente i seguenti parametri:
struct stru {
IPoint2 center;
//centro ellisse
IPoint2 dim;
//dimensioni assi
int angle;
//angolo di inclinazione
vtTransform *obj;
//puntatore all’elemento nella
struttura
};
Marco Pergher
Tesi di Laurea Specialistica
60
Analisi delle immagini e generazione degli oggetti 3D
Partendo dalla struttura base illustrata, viene creato un vettore
(denominato fonda) contenente tali strutture, dimensionato in
funzione del numero di edifici presenti nell’ortofoto.
L’elemento 3DS presente nello schema precedente rappresenta
l’oggetto geometrico che verrà inserito all’interno della scena 3D
per rappresentare i vari edifici. Tale elemento viene caricato per
ogni edificio presente sul territorio e riscalato opportunamente
secondo le tre dimensioni, seguendo i valori contenuti all’interno
della struttura dati creata in precedenza:
for(unsigned int x=0;x<pTerr->fonda.size();x++)
{
r=1;
sprintf(s,"Culture/case/House0%d.3ds",r);
pTerr->fonda[x].obj = pTerr->LoadModel(s);
pTerr->fonda[x].obj->Scale3(pTerr->fonda[x].dim.x,
0.5f+random(0.5f), pTerr->fonda[x].dim.y);
pTerr->fonda[x].obj->RotateLocal(FPoint3(0.0f,1.0f,0.0f),
((float)(pTerr->fonda[x].angle))*PI/180.0f);
pTerr->PlantModelAtPoint(pTerr->fonda[x].obj,
DPoint2((((double)(pTerr->fonda[x].center.x)*
pTerr->GetCorners().Width())/4096.0) +
pTerr->GetCorners().left,
(pTerr->GetCorners().top ((double)(pTerr->fonda[x].center.y)*
pTerr->GetCorners().Height())/4096.0)));
pTerr->AddNodeToStructGrid(pTerr->fonda[x].obj);
}
Il codice sopra mostra come viene caricato ed inserito all’interno
dell’ambiente 3D ciascun edificio seguendo i parametri contenuti
all’interno del vettore denominato fonda. Schematicamente, le
operazioni eseguite nel codice sono:
1. caricamento
oggetto
3DS
attraverso
la
funzione
LoadModel();
2. RISCALAMENTO dell’oggetto 3DS attraverso la funzione
Scale3(), effettuato in funzione della dimensione dell’asse
maggio e minore dell’ellisse in esame;
Marco Pergher
Tesi di Laurea Specialistica
Analisi delle immagini e generazione degli oggetti 3D
61
3. rotazione dell’oggetto attraverso la funzione RotateLocal() in
funzione dell’angolo di inclinazione dell’ellisse;
4. caricamento delle coordinate geometriche x, y, attraverso la
funzione
PlantModelAtPoint(),
identificanti
la
posizione
dell’edificio all’interno della mappa 3D;
5. inserimento dell’oggetto all’interno dell’albero di scena
attraverso la funzione AdNodeToStructGrid().
I punti sopra citati permettono di ottenere il seguente risultato:
Figura 34: L’immagine mostra degli edifici inseriti nell’ambient e 3D, generati a
partire dall’ortofoto sovrapposta alla planimetria.
Le ortofoto a bassa risoluzione non permettono di otte nere un
risultato soddisfacente, in quanto le dimensioni degli edifici risultano
essere molto inesatte rispetto alle effettive. In questi casi è
consigliabile l’utilizzo della cartografia numerica come supporto, o in
sostituzione, all’elaborazione dell’immagine al fine di ottenere
oggetti con geometria più accurata.
Analoghe considerazioni valgono ancor più per la generazione della
mappa stradale. Infatti, l’acquisizione in formato vettoriale delle
varie strade presenti su un territorio, richiede una defini zione
dell’ortofoto molto elevata. Per questo motivo si è scelto di
Marco Pergher
Tesi di Laurea Specialistica
62
Analisi delle immagini e generazione degli oggetti 3D
importare
nell’applicazione
la
mappa
stradale
attraverso
la
cartografia numerica.
Il risultato ottenuto utilizzando la cartografia è il seguente:
Figura 35: L’immagine mostra l’inserimento di edifici e strade all’interno della
scena 3D utilizzando la cart ografia numerica.
4.3
Generazione della vegetazione
L’uso della cartografia numerica non sempre è da considerarsi migliore
rispetto
all’elaborazione
dell’ortofoto
sovrapposta
alla
planimetria.
Esaminiamo, ad esempio,
l’immagine a fianco. L’area
raffigurata, rappresenta un
tipico ambiente boschivo
all’interno del quale sono
presenti
alcune
radure.
La
piccole
cartografia
numerica trascura queste distinzioni e classifica come bosco l’intera area
in esame. Questa imprecisione comporterebbe un errato posizionamento
della vegetazione all’interno dell’applicazione. Per ovviare a questo
problema, si è scelto di utilizzare una tecnica simile alla precedente per
Marco Pergher
Tesi di Laurea Specialistica
Analisi delle immagini e generazione degli oggetti 3D
63
identificare le regioni ove inserire i vari alberi. Tale metodo si può
riassumere nei seguenti punti:
L’ortofoto viene opportunamente filtrato per riconoscere le zone ove
sono presenti alberi. A tale scopo, viene generata un’immagine ad
1 bit in bianco e nero, avente la stessa risoluzione dell’ortofoto
originale, ove le aree contraddistinte dal colore nero identificano la
presenza di alberi, contrariamente alle aree di colore bianco.
Figura 36: Analizzando l’immagine a destra si può notare come le radure
vengano escluse dalla circostante zon a boschiva.
A
questo
punto,
vengono
generate
coppie
di
coordinate
geometriche casuali, interne alla zona in esame.
Successivamente, per ogni punto identificato dalle coppie di
coordinate, se ne verifica l’appartenenza o meno ad una zona
boschiva attraverso la lettura dell’immagine in bianco e nero:
Marco Pergher
Tesi di Laurea Specialistica
64
Analisi delle immagini e generazione degli oggetti 3D
Se la verifica eseguita termina a buon fine si procede con
l’inserimento della geometria opportuna all’interno dell’albero di
scena. Generalmente gli alberi vengono rappresentati all’interno
dell’ambiente tridimensionale utilizzando una struttura a billboard:
Figura 37: L’albero viene rappresentato utilizzando due superfici incrociate di 90
gradi e sovrapponendo a ciascuna di esse l’immagine della specie vegetale
desiderata.
Il codice semplificato che svolge queste operazioni è il seguente:
vtDIB dib;
RGBAi color;
dib.ReadPNG("../Data/GeoSpecific/baselgaBN.png");
vtTerrain *pTerr = GetCurrentTerrain();
double x,y;
int ox,oy;
//lettura
// immagine B&N
for(unsigned int a=0;a<650000;a++){
x = pTerr->GetCorners().left+
//generazione
(double)(random((float)
// coordinate casuali
(pTerr->GetCorners().Width()-10)));
y = pTerr->GetCorners().top(double)(random((float)
(pTerr->GetCorners().Height()-10)));
ox=(x-pTerr->GetCorners().left)*
pTerr->GetImage()->s()/
pTerr->GetCorners().Width();
oy=(pTerr->GetCorners().top-y)*
pTerr->GetImage()->t()/
pTerr->GetCorners().Height();
//Conversione
// coordinate:
// GEOGRAFICHE
//
↓
//
PIXEL
dib.GetPixel32(ox,oy,color);
//Lettura colore
if(color.r==0)
PlantATree2(DPoint2(x,y));
else a--;
}
//Verifica colore
Utilizzando il procedimento descritto, il risultato che si ottiene è il
seguente:
Marco Pergher
Tesi di Laurea Specialistica
Analisi delle immagini e generazione degli oggetti 3D
65
Figura 38: L’immagine mostra come vengono rappres entati gli alberi all’interno
dell’ambient e tridimensionale. Si può notare che l’algoritmo di posizionamento
sopra citato è in grado di riconoscere le zone int erne ai boschi prive di
vegetazione a fusto alto.
4.4
Simulazioni
Grazie a tutte le funzionalità descritte in precedenza, questa applicazione
si presta particolarmente ad un vasta gamma di simulazioni finalizzate alla
valutazione di interventi sul territorio.
In particolar modo, a causa della crescente necessità di software per il
supporto alla pianificazione di reti di telecomunicazioni wireless [19],
esaminiamo ora una possibile simulazione finalizzata alla valutazione
dell’intensità di campo elettromagnetico in una determinata regione.
Le caratteristiche di propagazione del segnale differiscono profondamente
a seconda dell’ambiente di propagazione, che può essere identificato dai
seguenti parametri:
Morfologia del terreno;
Densità della vegetazione;
Altezza e densità dei palazzi;
Spazi aperti e superfici d’acqua.
Marco Pergher
Tesi di Laurea Specialistica
66
Analisi delle immagini e generazione degli oggetti 3D
Come si può notare, tutte queste informazioni sono facilmente ottenibili
dall’applicazione sviluppata. In particolare, gli ambienti di propagazione
vengono classificati sulla base del rapporto tra l’area occupata dagli edifici
e l’area totale. Tale rapporto è detto Ground Occupation Rate (GOR) ed è
circa uguale a:
Tipo regione
Descrizione
GOR
Densamente
urbanizzata
Tipica business area cittadina, ove si
trovano principalmente uffici e qualche
residenza privata. Gli edifici facenti
parte di questa categoria sono
composti principalmente di cemento,
metallo e vetro, e raggiungono
un’altezza media che supera i 15
piani.
1
Urbana
Regione composta da edifici adibiti
per la maggior parte a residenze
private ed uffici. Queste costruzioni
hanno un’altezza che può variare dai
10 ai 15 piani.
0,7 ÷ 0,9
Suburbana
Regione composta da edifici costruiti
principalmente di mattoni, cemento e
ferro. La loro altezza può variare da 2
a 5 piani.
0,1 ÷ 0,6
Rurale
Pochi edifici disseminati su una vasta
area ove si trova in prevalenza
vegetazione
< 0,1
L’individuazione di queste aree è morto importante ai fine della
valutazione dell’intensità di campo, in quanto, il segnale subisce diverse
tipologie di attenuazioni in funzione della zona in cui si sta propagando.
Infatti, oltre alla normale dispersione di potenza dovuta alla distanza tra
antenna trasmittente e ricevente (pathloss), si deve considerare anche
l’attenuazione supplementare del segnale dovuta all’oscuramento prodotto
da ostacoli naturali o artificiali (shadowing). Quindi, tanti più ostacoli si
pongono tra trasmettitore e ricevitore, tanto più il segnale verrà attenuato.
Marco Pergher
Tesi di Laurea Specialistica
Analisi delle immagini e generazione degli oggetti 3D
67
Un modello globale per il pathloss, comprendente anche gli effetti dello
shadowing, adatto per ambienti radiomobili cellulari può essere così
definito:
Il valore del parametro GOR va ad influenzare l’esponente di pathloss, che
assume quindi diversi valori in funzione della regione di propagazione.
Utilizzando le nozioni descritte sopra, e stabilendo la posizione delle varie
antenne sulla superficie della regione in esame, si è ottenuto il seguente
risultato:
Figura 39: L’immagine mostra una simulazione
elettromagnetico per telefonia cellulare UMTS.
di
propagazione
di
c ampo
I risultati di tutte le simulazioni vengono, quindi, convertiti in un’immagine
da sovrapporre alla planimetria del territorio in esame. Utilizzando questa
tecnica è possibile effettuare una distinzione logica tra la parte software
Marco Pergher
Tesi di Laurea Specialistica
68
Analisi delle immagini e generazione degli oggetti 3D
adibita unicamente alla simulazione ed il motore di rendering volto a
generare la scena virtuale.
Questo consente una maggiore flessibilità e un conseguente aumento
della gamma di impieghi possibili per l’applicazione.
Marco Pergher
Tesi di Laurea Specialistica
Capitolo 5
Funzionalità avanzate ed applicativi integrati
Come
già
citato
in
precedenza,
una
delle
principali
finalità
dell’applicazione sviluppata consiste nell’associare e gestire più tipologie
di dati con una sola piattaforma software, volta a risolvere problematiche
anche molto diverse tra loro.
A questo scopo, all’interno del progetto principale, sono stati inseriti alcuni
applicativi Open Source finalizzati ad implementare funzionalità avanzate
di particolare interesse. Questi software aggiuntivi sono:
OpenCV®: è una raccolta di funzioni C e classi C++ che
implementano alcuni popolari algoritmi relativi all’ analisi di
Immagini e più in generale alla Computer Vision.
AppGPS: è una piccola applicazione Open Source che permette
l’interfacciamento con un’antenna GPS.
MapPoint®: è una stradario tradizionale contenente le mappe di tutti
gli stati europei.
Le sezioni sottostanti descrivono nel dettaglio le caratteristiche principali
delle applicazioni integrate.
Marco Pergher
Tesi di Laurea Specialistica
70
Funzionalità avanzate ed applicativi integrati
5.1
OpenCV®
OpenCV® è un prodotto software sviluppato da Intel® nato come libreria di
tools per la visione computerizzata [21]. Tale libreria è stata concepita per
migliorare l'acquisizione e l'elaborazione delle immagini fornendo codice
sorgente per una vasta gamma di funzioni, finalizzate a risolvere
problematiche legate all’immage processing.
In particolare, queste funzioni IN LINGUAGGIO C vengono richiamate dal
codice dell’applicazione principale e utilizzate per elaborare le ortofoto da
sovrapporre alla planimetria del territorio in esame. Tecnicamente, per
poter usufruire delle funzionalità di OpenCV®, è stata creata una classe
all’interno del software principale (denominata myOpenCV), ove includere
le librerie necessarie all’esecuzione dei vari filtri immagine implementati
dal programma esterno. Lo schema sottostante rappresenta come avviene
l’inclusione delle varie funzioni OpenCV®:
Le tipologie di filtri disponibili all’interno delle librerie OpenCV ® sono
molteplici e riguardano [22]:
Elaborazione di immagini
o Calcolo gradiente e contorni;
o Campionamento immagine ed interpolazione colore;
o Trasformate;
o Calcolo istogramma;
o Matching di elementi interni all’immagine;
o Filtri e conversione colore;
Marco Pergher
Tesi di Laurea Specialistica
Funzionalità avanzate ed applicativi integrati
71
Analisi geometrie raffigurate
o Estrazione dei contorni;
o Calcolo ed estrazione di geometrie;
Riconoscimento di Pattern
o Object detection;
Utilizzando queste funzionalità è possibile incrementare ulteriormente il
contenuto informativo di un’ortofoto visualizzando all’interno dell’ambiente
tridimensionale l’immagine elaborandola dal filtro opportuno.
Riportiamo di seguito alcuni esempi.
5.1.1 Estrazione perimetro degli edifici
Questo filtro consente di estrarre la geometria del perimetro dei vari edifici
rappresentati nell’ortofoto:
Figura 40: L’immagine evidenzia il perimet ro delle strutture rappresentate, dove ciascuna
geometria evidenziata rappresenta un oggetto caratteriz zato dalle coordinate dei vertici
formanti ogni poligono.
Questa funzionalità può permettere di classificare e catalogare gli edifici in
funzione dell’area da loro occupata oppure della loro geometria. Tuttavia,
l’utilizzo di questo algoritmo per la generazione degli oggetti 3D raffiguranti
le varie costruzioni, richiederebbe una risoluzione dell’ortofoto molto
elevata rallentando notevolmente le prestazioni del sistema. Per questo
Marco Pergher
Tesi di Laurea Specialistica
72
Funzionalità avanzate ed applicativi integrati
motivo si è preferito utilizzare la già nota tecnica a sovrapposizione di
ellissi.
5.1.2 Calcolo di aree geometriche
Questo algoritmo sviluppato in OpenCV ® consente di determinare la
minima area concava o convessa che circoscrive un set di punti
prestabiliti. A tale scopo, molto spesso si ha la necessità di individuare
porzioni di territorio ove si manifestano determinati fenomeni, al fine di
pianificare in modo corretto e preciso specifici interventi. Ad esempio, in
ambito della sicurezza, è importante individuare quali sono le aree
all’interno delle quali sono presenti edifici di particolare interesse artistico –
culturale al fine di salvaguardare la loro integrità ed incolumità:
Figura 41: I punti verdi disegnati sulla mappa evidenziano i luoghi sensibili all’interno del
centro urbano raffigurato.
La funzione sopra citata permette di individuare il perimetro dell’area a
rischi e grazie a questo, consente di calcolare l’estensione della zona in
cui progettare l’intervento.
Come risultato di questa elaborazione si ottiene il vettore dei punti che
racchiudono
la
porzione
di
territorio
sopra
indicata.
All’interno
dell’ambiente tridimensionale, il risultato che si ottiene è il seguente:
Marco Pergher
Tesi di Laurea Specialistica
Funzionalità avanzate ed applicativi integrati
73
Figura 42: All’interno della scena 3D, l’area di intervento viene visualizzata con un
perimetro di colore rosso ben visibile.
Nel dettaglio, la funzione che effettua questa elaborazione è la seguente:
CvSeq* cvConvexHull2( const CvArr* points, void* hull_storage=NULL,
int orientation=CV_CLOCKWISE);
points: Vettore dei punti in input;
hull_storage: Indirizzo di memoria ove verrà memorizzato il poligono
orientation: verso di orientazione del poligono.
5.2
AppGPS
AppGPS è una semplice applicazione sviluppata in C utilizzata per
acquisire la posizione geografica da un’antenna GPS esterna e
posizionare un marker in corrispondenza delle rispettive coordinate.
Utilizzando le potenzialità dell’applicazione sviluppata, è possibile, quindi,
creare un navigatore tridimensionale virtuale.
Una delle problematiche più importanti affrontate durante la fase di
interfacciamento
tra
applicazione
ed
antenna
GPS,
riguarda
la
conversione da coordinate geografiche (lette direttamente dal dispositivo)
a coordinate gaussiane (utilizzate dall’applicazione). Le sezioni sottostanti
Marco Pergher
Tesi di Laurea Specialistica
74
Funzionalità avanzate ed applicativi integrati
descrivono le operazioni effettuate per giungere alla compatibilità dei due
sistemi.
5.2.1 Conversione da coordinate geografiche a gaussiane
e viceversa
Nel sistema UTM (Universal Transverse Mercator) ogni punto del globo
terrestre resta individuato da una coppia di valori che costituiscono le
coordinate chilometriche o gaussiane. Queste, ricavate dal reticolato
chilometrico già tracciato sulle carte topografiche, vengono definite [23]:
Coordinata Nord: distanza dall'equatore;
Coordinata Est: distanza dal meridiano centrale di tangenza del
fuso al quale appartiene il punto.
La rappresentazione cartografica del territorio italiano è contenuta entro
due fusi, tra loro sovrapposti di 30', aventi ognuno un'ampiezza angolare
di 6°. Il primo fuso (fuso ovest o fuso 32 UTM) è compreso tra i 6° e i 12°
Est da Greenwich mentre il secondo fuso (fuso est o fuso 33 UTM più una
Marco Pergher
Tesi di Laurea Specialistica
Funzionalità avanzate ed applicativi integrati
75
piccola parte del 34) è compreso tra i 12° e i 18° 30' Est da Greenwich e
aventi, rispettivamente, come meridiano centrale di tangenza quello di 9° e
di 15° Est da Greenwich. Descritte queste informazioni preliminari, le
formule di conversione implementate nell’applicazione sono:
1 Da geografiche (L;Φ) a gaussiane (E utm;Nutm ):
B L L0
w 1 0,0067681702 cos 2 ()
con L0 9 o L0 15 a seconda che il punto appartenga al fuso ovest
od est.
tan( )
A arctan
cos( w B )
v 1 0,0067681702 cos 2 ( A)
cos( A) tan(B )
Y 6397376,633 arcsin h
v
N utm 111092,08210 A 16100,59187 sin( 2 A) 16,96942 sin( 4 A)
0,02226 sin(6 A)
Eutm y 500000
2 Da gaussiane (E utm;N utm ) a geografiche (L;Φ):
A
Nutm
Nutm
0,1449300705 sin 2
111092,08210
111092,08210
Marco Pergher
Tesi di Laurea Specialistica
76
Funzionalità avanzate ed applicativi integrati
N utm
0,0002138508 sin 4
111092,08210
N utm
0,0000004322 sin 6
111092,08210
v 1 0,0067681702 cos 2 A
y Eutm 500000
y
v sinh
6397376,633
B arctan
cos( A)
arctan[tan( A) cos(v B )]
L B L0
Anche in questo caso con L0 9 o L0 15 a seconda che il punto
appartenga al fuso ovest od est.
5.2.2 Interfacciamento AppGPS
L’operazione
successiva
consiste
nel
connettere
l’antenna
GPS
all’elaboratore attraverso una connessione Bluetooth. Un requisito
importante per il corretto funzionamento del sistema, riguarda il protocollo
utilizzato dall’antenna che deve essere necessariamente NMEA0183.
Il software Open Source consente di configurare sia il numero della porta
seriale di comunicazione (COM1, COM2, COM3…) sia le caratteristiche
della porta stessa (velocità della connessione, dimensione byte, bit di
parità e bit di stop).
Marco Pergher
Tesi di Laurea Specialistica
Funzionalità avanzate ed applicativi integrati
77
La funzione principale che effettua la decodifica dell’informazione
proveniente dal dispositivo Bluetooth è la seguente [24]:
UINT MyThread(LPVOID pParam)
{
CAddGPSDlg* pDlg=(CAddGPSDlg*) pParam;
CSerialCom Serial;
NMEA0183 nmea0183;
CStringList StrList;
//assegnezione protocollo
if (!Serial.OpenPort("COM9"))
//assegnazione porta
{
pDlg->c_Static.SetWindowText("Can't Open Port!");
return 0;
}
//configurazione porta seriale
Serial.ConfigurePort(4800, 8, FALSE, NOPARITY, TWOSTOPBITS);
//lettura dati antenna e successivo inserimento all’interno della
variabile Data
...
BOOL Return=Serial.ReadByte(DataByte);
while (DataByte!='\r' && DataByte!='\n' && Return==TRUE)
{
Data[nIndex]=DataByte;
nIndex++;
Return=Serial.ReadByte(DataByte);
}
...
Serial.ClosePort();
//Chiusura porta seriale
return 0;
}
Lo schema funzionale che descrive le operazioni fondamentali da
effettuare
per
poter
utilizzare
un
dispositivo
GPS
all’interno
dell’applicazione principale è il seguente:
Marco Pergher
Tesi di Laurea Specialistica
78
Funzionalità avanzate ed applicativi integrati
Visualizzando l’interfaccia standard di AppGPS, il risultato che si ottiene è
il seguente:
Figura 43: Le informazioni visualizzate dall’applicazione AppGPS sono di tipo testuale e
identificano rispettivamente: ora della rilevazione, Latitudine, Longitudine, numero di
satelliti disponibili.
Inserendo all’interno del software principale le coordinate gaussiane
riferite alla posizione attuale letta dall’antenna GPS, si può ottenere una
soluzione di navigazione tridimensionale innovativa, come mostra la figura
sottostante:
Figura 44: Utilizzando questa applicazione è possibile ottenere una soluzione di
navigazione all’avanguardia, avente una grafica molto simile agli applicativi dedicati
all’intratteniment o.
Utilizzando come base software, una piattaforma GIS ed un dispositivo
GPS in cui ogni elemento inserito nella scena 3D è caratterizzato da
coordinate georeferenziate, le soluzioni applicative sono molteplici e di
particolare interesse.
Marco Pergher
Tesi di Laurea Specialistica
Funzionalità avanzate ed applicativi integrati
79
MapPoint®
5.3
MapPoint® è un’applicazione sviluppata da Microsoft® che consente
numerose funzionalità. Le più importanti sono [25]:
Capacità di relazionare mappe e dati;
Visualizzazione delle informazioni caratterizzanti una determinata
area geografica;
I
dati
sono
facilmente
utilizzabili
per
realizzare
analisi
geostatistiche;
Possibilità di utilizzare funzioni di geomarketing;
Possibilità di integrare dati aziendali e dati demografici con mappe
dettagliate per individuare tendenze e opportunità commerciali;
Capacità di creare soluzioni di localizzazione;
Capacità di creare una gestione cartografica personalizzata;
Monitoraggio e controllo del territorio;
Completa integrazione con gli applicativi Office ®;
Possibilità di definire percorsi automobilistici;
Individuazione dei principali punti di interesse (POI) presenti in una
determinata area geografica;
Vasta gamma di mappe stradali (disponibile in pacchetti opzionali)
relative ad Europa, Stati Uniti d’America, Canada ecc…;
Possibilità di accedere al database MapPoint® utilizzando una
libreria tlb.
Quest’ultimo punto risulta essere particolarmente interessante per
l’applicazione sviluppata in questo progetto. Infatti, grazie alla libreria
MPEU82.tlb, presente nella cartella di installazione di MapPoint®, è
possibile accedere direttamente all’applicazione per effettuare ricerche ed
ottenere, così facendo, descrizione e coordinate GPS dei principali punti di
interesse di una specifica area geografica.
Marco Pergher
Tesi di Laurea Specialistica
80
Funzionalità avanzate ed applicativi integrati
L’utilizzo diretto delle funzioni appartenenti a tale libreria nell’ambiente .net
permettono di ottenere i seguenti risultati:
Ricerca di edifici, luoghi o paesi di particolare interesse
L’applicazione principale consente di effettuare una chiamata in
background per avviare MapPoint® e far ritornare le informazioni
desiderate. Ad esempio, inserito come testo della ricerca: duomo
Trento, il risultato che si ottiene è il seguente:
Figura 45: L’applicazione consente di vis ualizzare all’interno della scena 3D i risultati
®
ottenuti tramite MapPoint .
Marco Pergher
Tesi di Laurea Specialistica
Funzionalità avanzate ed applicativi integrati
81
Ricerca di luoghi o edifici per categorie di appartenenza
Utilizzando lo stesso procedimento descritto nel punto precedente,
è possibile interrogare l’applicazione MapPoint® per visualizzare
all’interno della scena tridimensionale tutti i punti di interesse (POI)
appartenenti ad una certa zona, classificandone anche la categoria
di appartenenza.
Le classi principali in cui vengono suddivisi i vari punti sono:
Aeroporti;
Luoghi turistici di particolare interesse;
Stazioni;
Municipi;
Edifici adibiti a centri economico-finanziari di importanza
nazionale;
Centri congressi;
Centri divertimento;
Parchi;
Ospedali;
Motel – Hotel;
Monumenti;
Parcheggi auto;
Aree di servizio;
Ristoranti;
Centri shopping;
Ecc…;
Nel dettaglio, il procedimento per ottenere la rappresentazione dei
diversi POIs all’interno dell’ambiente 3D è il seguente:
1 Identificazione del luogo centrale a partire dal quale
estendere la ricerca;
2 Impostare il raggio entro cui rappresentare e ricercare i
diversi punti di interesse;
Marco Pergher
Tesi di Laurea Specialistica
82
Funzionalità avanzate ed applicativi integrati
3 Impostare il nome della categoria o delle categorie da
visualizzare;
4 Inserimento dei simboli in formato 3DS all’interno della scena
3D atti a rappresentare i diversi POIs;
5 Acquisizione di informazioni aggiuntive relative la località
selezionata (ad esempio: nome categoria di appartenenza,
nome località, indirizzo, numero civico, ecc…) al fine di
interrogare i diversi punti per visualizzare tali dati;
Il codice C++ che permette di eseguire queste operazioni è il
seguente:
//Istruzioni preliminari per avviare l’applicazione MapPoint®;
CoInitialize( NULL );
g_pMapPoint.CreateInstance( "MapPoint.Application" );
myMapPtr = g_pMapPoint->ActiveMap;
...
void Enviro::InsertPOI(){
vtTerrain *pTerr = GetCurrentTerrain();
//La funzione mapInit permette di ricevere in ingresso i seguenti
parametri:
//A: punto centrale della ricerca (centro di Trento)
//
attraverso coordinate geografiche (Latitudine,Longitudine);
//B: raggio entro cui effettuare la ricerca;
//C: categoria da ricercare;
myCat = ComInterfaces::mapInit( 46.066835,11.120069, 2.0f, "All");
...
}
...
//Per ciascun POI viene generato il testo da visualizzare al
//momento della richiesta di informazioni aggiuntive
_bstr_t strPOI = strCategoryName +" - " + strCategorySpecific +
"\n" + totStreet;
//Le caratteristiche che identificano ciascun POI vengono inserite
//all’interno di una struttura dati, per facilitare la ricerca
//delle varie informazioni eventualmente richieste
//dall’utilizzatore
strcpy(vetCat[ind].desc,
_com_util::ConvertBSTRToString(strPOI.GetBSTR()));
strcpy(vetCat[ind].group,
_com_util::ConvertBSTRToString(strCategoryName.GetBSTR()));
vetCat[ind].dim = count;
vetCat[ind].Lat = la;
vetCat[ind].Lon = lo;
Come si può notare dal codice sopra, le coordinate dei vari punti di
interesse, vengono fornite da MapPoint® in formato geografico,
mentre, come descritto in precedenza, l’applicazione principale
Marco Pergher
Tesi di Laurea Specialistica
Funzionalità avanzate ed applicativi integrati
83
gestisce solamente coordinate gaussiane. Questa problematica
viene risolta sfruttando la formulazione matematica descritta in
precedenza, relativa all’applicazione GPS di nome AppGPS.
Il risultato ottenuto attraverso l’implementazione del codice sopra
descritto, è il seguente:
Figura 46: L’immagine mostra la visualizzazione dei vari POIs acquisiti da
®
MapPoint , classificati ciascuno nella propria categoria di appartenenza.
Visualizzazione di contenuti Flash ®
Al fine di arricchire ulteriormente il contenuto informativo relativo ai
dati visualizzabili interrogando ciascun POIs, è possibile eseguire
un’applicazione Macromedia Flash® in grado di rappresentare un
contenuto multimediale specifico per gli edifici o i luoghi di
particolare interesse.
A tale scopo è necessario creare un database di presentazioni
Flash®
per
ciascuna
località
direttamente
eseguibili
dall’applicazione principale attraverso le seguenti istruzioni:
/***Applicazione Flash**/
if(strstr(Desc,"Consiglio") != NULL)
spawnlp(1,"Culture/pres/buonconsiglio.exe",
"Culture/pres/nome_presentazione.exe",0);
Marco Pergher
Tesi di Laurea Specialistica
84
Funzionalità avanzate ed applicativi integrati
Attraverso queste semplici istruzioni è possibile ottenere, ad
esempio:
Figura 47: L’immagine mostra la rappresent azione di una presentazione Flash
relativa ad un edificio di particolare int eresse storico.
®
Analogamente agli edifici, è possibile utilizzare questo tipo di
applicazione anche per luoghi turistici dove il paesaggio naturale è
la principale attrazione:
Figura 48: L’immagine mostra come, attraverso l’utilizzo di una presentazione
multimediale, sia possibile visualizzare a video diversi panorami ed interagire
direttamente con essi (ad esempio usufruendo di tecniche per la visione
panoramica).
Marco Pergher
Tesi di Laurea Specialistica
Capitolo 6
Campi di impiego
L’applicazione sviluppata sulla base del progetto Virtual Terrain Project
(VTP), trova spazio in molteplici campi applicativi come strumento di
progettazione a supporto delle decisioni. Grazie alla possibilità di acquisire
diverse tipologie di dati, aggregati in un’unica applicazione GIS, è
possibile elaborare simulazioni in grado di restituire una vasta gamma di
risultati, direttamente confrontabili tra loro e visualizzabili all’interno dello
stesso ambiente tridimensionale.
Oltre all’esempio di simulatore per lo studio della propagazione di campi
elettromagnetici visto in precedenza, di seguito sono descritti alcuni
possibili campi applicativi.
6.1
Valutazione impatto ambientale
Le problematiche legate all’impatto ambientale dovute all’inserimento di
strutture edilizie, al disboscamento o più in generale, a tutte le opere che
vanno ad incidere direttamente sul territorio, rappresentano oggi un
aspetto particolarmente importante volto alla salvaguardia del patrimonio
naturale.
A tale scopo, il software sviluppato si propone di rappresentare attraverso
scene tridimensionali e dati provenienti da simulazioni, lo scenario relativo
l’impatto ambientale dovuto a diversi interventi.
Marco Pergher
Tesi di Laurea Specialistica
86
Campi di impiego
6.1.1 Perforazioni per gallerie
Utilizzando le funzionalità dell’applicazione è possibile progettare e
prevedere l’impatto sul territorio di opere di scavo al fine di valutare una
vasta gamma di dati, utili agli addetti ai lavori. Il risultato che si ottiene è il
seguente:
Figura 49: L’immagine evidenzia la messa in opera di una galleria adibita al
miglioramento della viabilità stradale nella zona di Baselga di Piné.
I dati ricavabili da una simulazione di questo tipo, possono essere:
Volume di materiale da estrarre;
Distanze e dimensioni dell’opera;
Eventuale disboscamento;
Ecc…
6.1.2 Disboscamento dovuto all’installazione di impianti di
risalita o cablaggio del territorio
In una regione montana, come è il Trentino Alto Adige, spesso si ha
l’esigenza di costruire impianti di risalita per installazioni sciistiche. Al fine
Marco Pergher
Tesi di Laurea Specialistica
Campi di impiego
87
di valutare il conseguente disboscamento delle zone ove vengono
collocati i tralicci di collegamento, il sistema è in grado di rappresentare
nell’ambiente tridimensionale l’impatto ambientale di costruzioni di questo
tipo. Analoghe considerazioni avvengono per le operazioni di cablaggio
del territorio legato alla rete di distribuzione dell’energia elettrica.
Il risultato che si ottiene è il seguente:
Figura 50: L’immagine evidenzia c on il colore rosso, gli alberi da togliere per
l’installazione dei vari tralicci.
6.1.3 Fenomeni naturali
L’impatto ambientale dovuto a cause legate a fenomeni naturali, è oggi
una materia di studio particolarmente interessante, finalizzata alla
prevenzione e al contenimento degli eventuali danni causati da tali eventi.
L’applicazione sviluppata è in grado di simulare varie tipologie di fenomeni
con lo scopo di pianificare i possibili interventi nell’are interessata.
Ad esempio, una problematica particolarmente sentita in materia idraulica
nella città di Trento, consiste nel simulare una possibile alluvione, legata
ad un’eventuale piena del fiume Adige.
A tale scopo, il sistema sviluppato sarebbe in grado di fornire le seguenti
informazioni:
Marco Pergher
Tesi di Laurea Specialistica
88
Campi di impiego
Area coinvolta dal fenomeno;
Numero di edifici coinvolti;
Edifici di interesse storico - culturale coinvolti;
Ecc…
Il risultato di tale simulazione è il seguente:
Figura 51: L’utilizzatore, attraverso la navigazione 3D, è in grado di
valutare le zone colpite dal fenomeno.
6.2
Localizzazione di automezzi all’interno della
mappa 3D
Sfruttando le funzionalità GIS dell’applicazione è possibile creare un
sistema di tracking volto alla localizzazione di automezzi. Questa
funzionalità risulta essere particolarmente interessante in quanto, ogni
automezzo è direttamente inserito nell’ambiente tridimensionale, il quale,
grazie alle funzionalità avanzate, può essere in grado di restituire
(utilizzando, ad esempio, una trasmissione GSM): caratteristiche del
mezzo, posizione e tragitto fino ad ora percorso.
Marco Pergher
Tesi di Laurea Specialistica
Campi di impiego
89
Figura 51: L’immagine mostra il posizionamento all’interno dell’ambiente tridimensionale
di una flotta di autoveicoli.
Analogamente a quanto avviene per i mezzi stradali, un sistema analogo
può essere utilizzato per il tracciamento e la localizzazione di animali o più
in generale, di corpi mobili all’interno di un determinato territorio.
6.3
Turismo
Grazie alla visualizzazione di scenari
ed
edifici
tridimensionali,
questo
sistema può essere utilizzato anche
per la valorizzazione di luoghi o siti
di
particolare
interesse
turistico.
Come già accennato in precedenza,
l’applicazione
da
la
possibilità
all’utente di:
Selezionare e visualizzare scenari all’interno della scena 3D;
Interrogare monumenti o edifici di particolare interesse per ottenere
descrizioni ed informazioni aggiuntive;
Definire itinerari e percorsi;
Ottenere informazioni riguardo hotel, ristoranti, ecc…
L’utente può utilizzare queste funzionalità per ottenere informazioni
finalizzate a delineare un proprio tour turistico.
Marco Pergher
Tesi di Laurea Specialistica
90
Campi di impiego
6.4
Altri impieghi
Ulteriori campi applicativi, ove l’applicazione può essere utilizzata, sono:
Monitoraggio e gestione del traffico stradale:
utilizzando dei sensori posizionati in punti strategici all’interno del
tessuto urbano, è possibile rappresentare i dati rilevati da tali
dispositivi,
utilizzando
l’ambiente
tridimensionale
fornito
dall’applicazione sviluppata. Tutto questo per dare all’utilizzatore un
valido strumento finalizzato al supporto decisionale.
Gestione tridimensionale del piano regolatore:
Come già descritto in precedenza, è possibile importare all’interno
della scena 3D una vasta gamma di dati, tra cui files di tipo dwg e
dxf. Questi files, tipicamente sono utilizzati in ambiente CAD per
visualizzare e gestire la dislocazioni dei fabbricati e delle abitazioni
presenti su un territorio. L’applicazione sviluppata, consente di
gestire queste tipologie di dati in modo automatico dandone una
rappresentazione tridimensionale all’interno dell’ambiente 3D. Le
principali caratteristiche di questa funzionalità sono:
o tutte le geometrie generate all’interno della scena 3D sono
georeferenziate;
o la
navigazione
tridimensionale
consente
una
facile
consultazione del territorio;
o possibilità di interrogare i vari elementi geometrici;
o classificazione degli edifici attraverso diverse colorazioni;
o possibilità di interpretare le informazioni, limitata non solo
agli addetti ai lavori;
o ecc…
Questo nuovo modo di rappresentare dati tecnici, permette, inoltre,
di visualizzare strutture o fabbricati ancora in fase progettuale e
Marco Pergher
Tesi di Laurea Specialistica
Campi di impiego
91
quindi di validare o revisionare il processo decisionale finalizzano
alla costruzione di tali edifici:
Figura 52: L’immagine mostra un territorio prima (a sinistra) e dopo (a destra) la
costruzione dei due palazzi contraddistinti dal colore verde.
Problematiche legate all’ecoterrorismo:
Negli ultimi anni sono stati molti i paesi europei ad adottare
contromisure contro il fenomeno dell’ecoterroristo. L’ecoterrorismo
identifica
tutte
le
azioni
terroristiche
che
vanno
a
colpire
direttamente territorio ed ambiente naturale. Come già accennato
nel capitolo Funzionalità avanzate ed applicativi integrati, attraverso
il software sviluppato è possibile identificare i luoghi a rischio e
pianificare interventi specifici finalizzati a prevedere od affrontare
azioni di questo tipo.
Marco Pergher
Tesi di Laurea Specialistica
92
Marco Pergher
Campi di impiego
Tesi di Laurea Specialistica
Capitolo 7
Conclusioni
SFORZATI A DIRE DI Pù E MEGLIO
Questo lavoro di tesi ha permesso di sviluppare un’applicazione GIS
integrata da un gran numero di informazioni aggiuntive fina lizzata, come
già citato, al supporto nel processo decisionale. La realizzazione del
progetto ha richiesto un notevole lavoro di ricerca e di studio finalizzati a:
ricercare la piattaforma software ideale a risolvere le problematiche
legate alla georeferenziazione dei dati;
sviluppare le funzionalità avanzate in grado di raggiungere gli
obiettivi prefissati;
Oltre ad aver progettato e sviluppato un prodotto software innovativo, i
risultati ottenuti soddisfano pienamente i requisiti predeterminati.
I possibili sviluppi futuri riguardano le seguenti problematiche:
inserimento di modem GSM per la gestione di flotte attraverso
l’applicazione;
creazione di un data base contenente informazioni relative ai
principali punti di interesse presenti su un determinato territorio;
miglioramento della gestione della mappa stradale legata alla
navigazione tridimensionale;
creazione di funzionalità aggiuntive legate alle simulazioni di
propagazione di campo elettromagnetico;
Marco Pergher
Tesi di Laurea Specialistica
94
Conclusioni
ampliamento
della
gamma
dei
formati
di
dati
importabili
dall’applicazione;
inserimento di ulteriori funzionalità legate ad OSG;
minimizzazione dell’albero di scena;
Grazie ad un modello di programmazione orientata agli oggetti, è possibile
implementare
tali aggiornamenti in modo funzionale.
Inoltre, tale
peculiarità permette di gestire efficientemente il livello di personalizzazione
del software, che può essere quindi modificato al fine di soddisfare
molteplici problematiche.
Marco Pergher
Tesi di Laurea Specialistica
Bibliografia
[1]
Laser navigation srl. Dall’aerofotogrammetria alla realtà virtuale.
3DCarto una nuova generazione nel mondo della cartografia.
Progetto 3DCarto®, Radio Nav®, Laser Navigation®.
[2]
3DCarto®, Radio Nav®, Laser Navigation®. http://www.radionav.it/.
[3]
Environmental Systems Research Istitute Inc. (ESRI), 380 New
York
Street
Redlands,
CA
92373-8100.
http://www.esri.com/software/arcgis/.
[4]
Environmental Systems Research Istitute Inc. (ESRI). ArcGIS®
Analyst, Virtual Reality – Because the World Isn’t Flat. Report 1998.
[5]
Environmental Systems Research Istitute Inc. (ESRI). ArcGIS®
Extensions. Report 2005.
[6]
Google earth®. http://earth.google.com/
[7]
AZPoint. Google Earth, immagini da satellite 3D del mondo. Articolo
luglio 2005. http://www.azpoint.net/
Marco Pergher
Tesi di Laurea Specialistica
96
Bibliografia
[8]
Claudio Parente, Daniela Pennacchio, Giovanni Pugliano, Raffaele
Santamaria. Tecniche innovative di rilievo e acquisizione dati per il
catasto strade. Istituto di Geodesia, Topografia e Idrografia,
Università degli studi di Napoli; Istituto di Navigazione, Università
degli studi di Napoli.
[9]
Thomas VÖGTLE, Eberhard STEINLE. 3D modelling of buildings
using laser scanning and spectral information. University of
Karlsruhe, Germany. Institute of Photogrammetry and Remote
Sensing;
[email protected],
[email protected]
karlsruhe.de. IAPRS, Vol. XXXIII, Amsterdam, 2000.
[10]
Norbert Haala, Claus Brenner. Extraction of buildings and tree in
urban environments. Istitute for Photogrammetry, University of
Stuttgart
Geschwister-Scholl-Strasse.
ISPRS
Journal
of
Photogrammetry & Remote Sensing 54 1999.
[11]
Norbert Haala, Claus Brenner and Karl-Heinrich Anders. 3D urban
GIS
from
laser altimeter and
Photogrammetry,
University
of
2D
map
Stuttgart
data.
Istitute
for
Geschwister-Scholl-
Strasse. Commission III, Working Group 4.
[12]
D. Frère, J. Vandekerckhove, T. Moons, and L. Vain Gool.
Automatic Modelling and 3D Reconstructioin of Urban Buildings
from Aerial Imagery. Katholieke Universiteit Leuven, E.S.A.T. / PSI,
Kard. Mercierlaan 94, B-3001 Heverlee, BELGIUM. IEEE 1998.
[13]
J. Whyte, N. Bouchlaghem, A. Thorpe, R. McCaffer. From CAD to
virtual reality: modelling approaches, data exchange and interactive
3D building design tools. Department of Civil and Building
Engineering,
Marco Pergher
Loughborough
University,
Loughborough,
Tesi di Laurea Specialistica
Bibliografia
97
Leicestershire LE11 3TU, UK. Automation in Construction 30 April
1999.
[14]
Virtual Terrain Project – VTP. http://www.vterrain.org/
[15]
University of Washington. GIS at Earth and Space Sciences.
http://duff.ess.washington.edu/
[16]
Organizzazione Progeo Firenze. http://www.prontogeometra.it
[17]
Stephanie Smullen, Clinton W. Smullen III, Carlos M. Santa.
Interactive 3D Terrain Exploration and Visualization. Center of
Excellence for Computer Applications, University of Tennessee at
Chattanooga.
[18]
University of Birmingham. http://www.cs.bham.ac.uk/
[19]
Giorgio Franceschetti, Antonio Iodice, Daniele Riccio, Giuseppe
Ruello.
Determinazione
della
radiocopertura
per
reti
di
telecomunicazioni. Dipartimento di Ingegneria Elettronica e delle
Telecomunicazioni, Università di Napoli “Federico II”.
[20]
Bollettino Università e Ricerca. Il computer leggerà le labbra.
Professionel e-journal. http://www.bur.it/.
[21]
Intel Corporate. http://www.intel.com/
[22]
Michele T. Mazzucato. Coordinate gaussiane e geografiche: loro
trasformazione.
[23]
A.
Riazi.
Add
GPS
support
to
your
desktop.
http://www.codeproject.com/
Marco Pergher
Tesi di Laurea Specialistica
98
[24]
Bibliografia
Microsoft Corporazion®. http://mappoint.msn.it
Marco Pergher
Tesi di Laurea Specialistica