SINAMICS S120
SINAMICS S120 Motori Torque completi 1FW3
Motori Torque completi 1FW3
Manuale di progettazione · 08/2009
SINAMICS
s
Prefazione
SINAMICS S120
Motori Torque completi 1FW3
Descrizione del motore
1
Progettazione
2
Caratteristiche meccaniche
dei motori
3
Dati tecnici e curve
caratteristiche
4
Componenti del motore
5
Tecnica di collegamento
6
Avvertenze sull'uso dei
motori
7
Appendice
A
Manuale di progettazione
08/2009 (PKTS)
6SN1197-0AD70-0CP4
Avvertenze di legge
Concetto di segnaletica di avvertimento
Questo manuale contiene delle norme di sicurezza che devono essere rispettate per salvaguardare l'incolumità
personale e per evitare danni materiali. Le indicazioni da rispettare per garantire la sicurezza personale sono
evidenziate da un simbolo a forma di triangolo mentre quelle per evitare danni materiali non sono precedute dal
triangolo. Gli avvisi di pericolo sono rappresentati come segue e segnalano in ordine descrescente i diversi livelli
di rischio.
PERICOLO
questo simbolo indica che la mancata osservanza delle opportune misure di sicurezza provoca la morte o gravi
lesioni fisiche.
AVVERTENZA
il simbolo indica che la mancata osservanza delle relative misure di sicurezza può causare la morte o gravi
lesioni fisiche.
CAUTELA
con il triangolo di pericolo indica che la mancata osservanza delle relative misure di sicurezza può causare
lesioni fisiche non gravi.
CAUTELA
senza triangolo di pericolo indica che la mancata osservanza delle relative misure di sicurezza può causare
danni materiali.
ATTENZIONE
indica che, se non vengono rispettate le relative misure di sicurezza, possono subentrare condizioni o
conseguenze indesiderate.
Nel caso in cui ci siano più livelli di rischio l'avviso di pericolo segnala sempre quello più elevato. Se in un avviso
di pericolo si richiama l'attenzione con il triangolo sul rischio di lesioni alle persone, può anche essere
contemporaneamente segnalato il rischio di possibili danni materiali.
Personale qualificato
Il prodotto/sistema oggetto di questa documentazione può essere adoperato solo da personale qualificato per il
rispettivo compito assegnato nel rispetto della documentazione relativa al compito, specialmente delle avvertenze
di sicurezza e delle precauzioni in essa contenute. Il personale qualificato, in virtù della sua formazione ed
esperienza, è in grado di riconoscere i rischi legati all'impiego di questi prodotti/sistemi e di evitare possibili
pericoli.
Uso conforme alle prescrizioni di prodotti Siemens
Si prega di tener presente quanto segue:
AVVERTENZA
I prodotti Siemens devono essere utilizzati solo per i casi d’impiego previsti nel catalogo e nella rispettiva
documentazione tecnica. Qualora vengano impiegati prodotti o componenti di terzi, questi devono essere
consigliati oppure approvati da Siemens. Il funzionamento corretto e sicuro dei prodotti presuppone un trasporto,
un magazzinaggio, un’installazione, un montaggio, una messa in servizio, un utilizzo e una manutenzione
appropriati e a regola d’arte. Devono essere rispettate le condizioni ambientali consentite. Devono essere
osservate le avvertenze contenute nella rispettiva documentazione.
Marchio di prodotto
Tutti i nomi di prodotto contrassegnati con ® sono marchi registrati della Siemens AG. Gli altri nomi di prodotto
citati in questo manuale possono essere dei marchi il cui utilizzo da parte di terzi per i propri scopi può violare i
diritti dei proprietari.
Esclusione di responsabilità
Abbiamo controllato che il contenuto di questa documentazione corrisponda all'hardware e al software descritti.
Non potendo comunque escludere eventuali differenze, non possiamo garantire una concordanza perfetta. Il
contenuto di questa documentazione viene tuttavia verificato periodicamente e le eventuali correzioni o modifiche
vengono inserite nelle successive edizioni.
Siemens AG
Industry Sector
Postfach 48 48
90026 NÜRNBERG
GERMANIA
N. di ordinazione documentazione: 6SN1197-0AD70-0CP4
Ⓟ 09/2009
Copyright © Siemens AG 2009.
Con riserva di eventuali modifiche tecniche
Prefazione
Informazioni sulla documentazione
All'indirizzo Internet http://www.siemens.com/motioncontrol/docu sono riportate informazioni
sui seguenti argomenti:
● Ordinazione della documentazione
In questa sezione si trova una panoramica aggiornata delle pubblicazioni.
● Download della documentazione
Altri link per il download di file dal Service & Support.
● Ricerca online della documentazione
Informazioni su DOConCD e accesso diretto alle pubblicazioni in DOConWeb.
● Strutturare individualmente la documentazione sulla base dei contenuti Siemens con My
Documentation Manager (MDM), vedere http://www.siemens.com/mdm
My Documentation Manager dispone di una serie di funzioni che consentono di creare la
propria documentazione relativa alla macchina.
● Formazione e FAQ
Per informazioni sull'offerta di corsi di formazione e sulle FAQ (Frequently Asked
Questions), selezionare il relativo link indicato nella colonna laterale.
Destinatari
Pianificatori e progettisti
Uso
Il Manuale di progettazione è di supporto nella scelta dei motori, nel calcolo dei componenti
dell'azionamento, nella scelta degli accessori necessari e delle opzioni di potenza della rete
e del motore.
Configurazione standard
L'insieme delle funzionalità descritte nella presente documentazione può discostarsi dalle
funzionalità presenti nel sistema di azionamento fornito. Il sistema di azionamento può
contenere altre funzioni oltre a quelle descritte in questo manuale. Ciò non costituisce però
obbligo di implementazione di tali funzioni in caso di nuove forniture o di assistenza tecnica.
Eventuali integrazioni o le modifiche apportate dal costruttore della macchina vengono
documentate dello stesso.
Inoltre, per motivi di chiarezza, questa documentazione non riporta tutte le informazioni
dettagliate relative alle varie esecuzioni del prodotto e non può nemmeno prendere in
considerazione e trattare ogni possibile caso di montaggio, funzionamento e manutenzione.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
5
Prefazione
Domande sulla documentazione
Per domande relative alla documentazione tecnica (ad es. suggerimenti, correzioni) si prega
di inviare un fax o una e-mail al seguente indirizzo:
Fax
+49 (0) 9131 / 98-2176
E-mail
mailto: [email protected]
In appendice al presente documento è disponibile un modello fax.
Informazioni relative al prodotto
http://www.siemens.com/sinamics
Dichiarazioni di conformità CE
La dichiarazione di conformità CE relativa alle direttive sulla bassa tensione è
disponibile/reperibile
● in Internet:
http://support.automation.siemens.com con l'ID 22383669 oppure
● presso la filiale Siemens di zona
6
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Prefazione
Avvertenze di pericolo
PERICOLO
La messa in servizio non è consentita fino a quando non è stato accertato che la macchina
sulla quale devono essere installati i componenti descritti nel presente manuale è conforme
alle disposizioni della direttiva macchine CE.
La messa in servizio delle apparecchiature SINAMICS e dei motori può essere eseguita
solo da personale adeguatamente qualificato.
Questo personale deve tenere in considerazione la relativa documentazione tecnica
inerente il prodotto e deve conoscere e rispettare le avvertenze di pericolo indicate.
Durante il funzionamento di apparecchiature e motori elettrici, i circuiti elettrici che si
trovano sotto tensione costituiscono una fonte di pericolo. Tutti i lavori sull'impianto elettrico
devono avvenire in assenza di tensione.
Nel funzionamento degli impianti è possibile che si verifichino movimenti pericolosi degli
assi.
Il collegamento di apparecchiature SINAMICS con motori sincroni alla rete di alimentazione
tramite dispositivi di protezione (RCD) per le dispersioni di corrente (FI) è ammesso solo se
la compatibilità delle apparecchiature con il dispositivo di protezione FI è comprovata
secondo la norma EN 50178, cap. 5.2.11.2.
I motori sono omologati, insieme al sistema di azionamento, per operare su reti TN e TT
con centro stella messo a terra e su reti IT.
Nel funzionamento su reti IT la comparsa di un primo errore tra una parte attiva e la terra
deve essere segnalata da un dispositivo di monitoraggio. La norma IEC 60364-4-41
raccomanda di fare il possibile per eliminare al più presto il primo errore.
Nelle reti con conduttore esterno messo a terra occorre inserire un trasformatore di
isolamento con centro stella messo a terra (lato secondario) tra rete e sistema di
azionamento, in modo da evitare sollecitazioni non ammesse dell'isolamento del motore.
Dal momento che prevalgono le reti TT con conduttore di linea messo a terra, è necessario
impiegare un trasformatore di isolamento.
AVVERTENZA
Nel caso dei motori 1FW3, sui collegamenti dei motori è presente tensione quando il rotore
è in rotazione (presenza di magneti permanenti). In base al tipo di motore la tensione può
raggiungere anche i 1000 V.
Per un funzionamento ottimale e sicuro di queste apparecchiature e dei relativi motori è
essenziale che il trasporto, l'immagazzinaggio, l'installazione e il montaggio siano stati
eseguiti con la cura necessaria.
Per l'esecuzione di varianti speciali per le apparecchiature e i motori è necessario fare
riferimento alle indicazioni riportate nei cataloghi e nelle offerte.
Oltre alle avvertenze di pericolo contenute nella documentazione tecnica fornita, vanno
tenute presenti anche le normative nazionali, locali e le prescrizioni relative all'impianto.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
7
Prefazione
CAUTELA
La temperatura sulla superficie esterna dei motori può superare +100 °C.
Per questo motivo componenti termosensibili quali ad es. cavi o componenti elettronici non
devono trovarsi nelle immediate vicinanze del motore o essere fissati allo stesso.
Nel montaggio occorre prestare attenzione affinché i cavi di collegamento
– non siano danneggiati
– non vengano posti in trazione e
– non vengano agganciati da parti in movimento.
CAUTELA
Il collegamento dei motori va eseguito sulla base delle istruzioni operative. Non è
consentito il collegamento diretto dei motori alla rete in corrente trifase perché questo
potrebbe distruggere i motori.
Le apparecchiature SINAMICS e i motori sincroni vengono sottoposti, durante la prova
individuale, a una prova dielettrica. Durante la prova dielettrica degli equipaggiamenti
elettrici di macchine industriali secondo la norma EN 60204-1, paragrafo 19.4, è necessario
scollegare/estrarre tutti i connettori delle apparecchiature SINAMICS per evitare di
danneggiare queste ultime.
CAUTELA
L'interfaccia DRIVE-CLiQ contiene dati specifici sul motore e sull'encoder, oltre a una
targhetta elettronica del tipo; pertanto questo Sensor Module può essere installato solo su
un motore originale e non su altri motori e non può essere sostituito con Sensor Module di
altri motori.
L'interfaccia DRIVE-CLiQ è a diretto contatto con componenti sensibili alle cariche
elettrostatiche (ESD). I collegamenti non devono venire a contatto con le mani o con
utensili che siano caricati elettrostaticamente.
Nota
Le apparecchiature SINAMICS con motori sincroni, in condizioni adeguate di esercizio e in
ambienti operativi asciutti, soddisfano la direttiva sulle basse tensioni.
Le apparecchiature SINAMICS con motori soddisfano la direttiva EMC per le configurazioni
indicate nella relativa dichiarazione di conformità CE.
8
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Prefazione
Avvertenze ESD e campi elettromagnetici
CAUTELA
Elecrostatic Sensitive Devices (ESD) sono componenti singoli, circuiti integrati o schede
che possono essere danneggiati da campi o scariche elettrostatiche.
Manipolazione - prescrizioni per i componenti ESD:
Lavorando con componenti elettronici è indispensabile provvedere ad una buona messa a
terra della persona, della stazione di lavoro e dell'imballaggio!
I componenti elettronici devono essere manipolati solo in aree ESD con pavimentazione
dotata di ottima conducibilità se il personale
– indossa l'apposito bracciale ESD messo a terra e
– porta scarpe ESD o gli appositi nastri ESD per la messa a terra delle scarpe.
Il contatto con componenti elettronici va comunque evitato se non strettamente
indispensabile.
I componenti elettronici non devono venire a contatto con elementi in plastica e indumenti
con parti in plastica.
Le schede elettroniche possono essere depositate solo su ripiani dotati di ottima
conducibilità (tavoli con rivestimento ESD, gommapiuma ESD con ottima conducibilità,
buste ESD per l'imballo, contenitori ESD per il trasporto).
Le schede elettroniche non devono essere collocate nelle vicinanze di videoterminali,
monitor o televisori. Distanza dallo schermo > 10 cm).
Sulle schede elettroniche si possono eseguire misure se
– l'apparecchio di misura è messo a terra (p. es. tramite apposito conduttore di terra)
oppure
– prima della misura, nel caso di apparecchi di misura non messi a terra, il puntale di
misura viene messo per breve tempo a terra
(p. es. toccando una parte non verniciata della custodia dell'apparecchiatura di comando).
PERICOLO
I campi elettrici, magnetici ed elettromagnetici che si manifestano in condizioni di esercizio
nelle immediate vicinanze del prodotto possono essere pericolosi per portatori di
pacemaker, impianti o simili.
Gli addetti alla macchina o all'impianto e le persone che vengono a trovarsi in prossimità
del prodotto devono rispettare le norme e le direttive pertinenti! Nello spazio economico
europeo si tratta in particolare della direttiva CEM 2004/40/CE, norme EN 12198-1 ...
12198-3, mentre nella Repubblica Federale Tedesca vigono le norme antinfortunistiche
dell'associazione professionale BGV 11 con il relativo regolamento BGR 11 "Campi
elettromagnetici".
Inoltre si deve effettuare un'analisi dei rischi di ogni posto di lavoro, stilare e applicare le
misure cautelari per ridurre i pericoli e i rischi per le persone, nonché definire e rispettare le
aree a rischio di esplosione e quelle pericolose.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
9
Prefazione
Avvertenza sui prodotti di terze parti
ATTENZIONE
Questo stampato contiene raccomandazioni su prodotti di terze parti. Si tratta di prodotti di
altri fornitori, di cui conosciamo l'idoneità di massima. Naturalmente si possono utilizzare
prodotti di ulteriori fornitori con caratteristiche analoghe. Le nostre indicazioni devono
essere intese come informazione e non come prescrizione. Siemens non si assume alcuna
responsabilità per la qualità dei prodotti di terze parti.
Compatibilità ambientale
● Aspetti ambientali nello sviluppo
Nella scelta dei componenti di fornitori esterni la compatibilità ambientale è stata un
criterio essenziale.
Particolare importanza è stata attribuita alla riduzione del volume, della massa e della
varietà di tipi di parti metalliche e in plastica.
Può essere esclusa una compromissione dell'impregnazione della vernice (test)
● Aspetti ambientali nella produzione
Il trasporto dei componenti di fornitori esterni e dei prodotti avviene prevalentemente in
imballi riutilizzabili. Non è necessario prevedere trasporti per merci pericolose.
Il materiale di imballaggio è costituito principalmente da cartonaggi conformi alla direttiva
sugli imballaggi 94/62/CE.
Il consumo energetico nella fase di produzione è stato ottimizzato.
La produzione è esente da emissioni.
● Aspetti ambientali nello smaltimento
Lo smaltimento dei motori deve avvenire nel rispetto delle prescrizioni nazionali e locali
relative al normale processo di materiali oppure restituendoli al costruttore.
Durante lo smaltimento occorre osservare quanto segue:
Trattare l'olio secondo la normativa sugli olii esausti (ad es. olio per trasmissione per
accoppiamento riduttori)
Non miscelare con solvente, detergenti a freddo o residui di vernice
Separare i componenti per il riciclaggio in base a:
– rottami elettronici (ad es. elettronica del trasduttore, moduli sensori)
– rottame ferroso
– alluminio
– metalli verniciati (ruote di ingranaggi, avvolgimenti di motori)
10
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Prefazione
Rischi residui di Power Drive System
Nell'ambito della valutazione dei rischi della macchina, da eseguire conformemente alla
direttiva macchine CE, il costruttore della macchina deve considerare i seguenti rischi residui
derivanti dai componenti per il controllo e l'azionamento di un Power Drive System (PDS).
1. Movimenti indesiderati di parti della macchina motorizzate durante la messa in servizio, il
funzionamento, la manutenzione e la riparazione, dovuti ad esempio a
– Errori hardware e/o software nei sensori, nel controllo, negli attuatori e nella tecnica di
collegamento
– Tempi di reazione del controllo e dell'azionamento
– Funzionamento e/o condizioni ambientali esterni alla specifica
– Errori durante la parametrizzazione, la programmazione, il cablaggio e il montaggio
– Utilizzo di apparecchiature radio / telefoni cellulari nelle immediate vicinanze del
controllo
– Influenze esterne / danneggiamenti.
2. Temperature eccezionali nonché emissioni di luce, rumori, particelle e gas, dovuti ad
esempio a
– Guasto a componenti
– Errore software
– Funzionamento e/o condizioni ambientali esterni alla specifica
– Influenze esterne / danneggiamenti.
3. Tensioni di contatto pericolose, ad esempio dovute a
– Guasto a componenti
– Influenza in caso di cariche elettrostatiche
– Induzione di tensioni con motori in movimento
– Funzionamento e/o condizioni ambientali esterni alla specifica
– Condensa / imbrattamenti conduttivi
– Influenze esterne / danneggiamenti
4. Campi elettrici, magnetici ed elettromagnetici in condizioni di esercizio che ad es.
possono essere pericolosi per portatori di pacemaker, impianti od oggetti metallici in caso
di distanza insufficiente.
5. Rilascio di sostanze ed emissioni dannose per l'ambiente in caso di utilizzo non
appropriato e/o smaltimento non corretto dei componenti.
Per ulteriori informazioni sui rischi residui derivanti dai componenti del PDS, consultare la
Documentazione tecnica per l'utente ai capitoli relativi.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
11
Prefazione
12
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Indice del contenuto
Prefazione ................................................................................................................................................. 5
1
2
3
4
Descrizione del motore ............................................................................................................................ 17
1.1
Proprietà.......................................................................................................................................17
1.2
Prospetto delle coppie .................................................................................................................19
1.3
Caratteristiche tecniche ...............................................................................................................20
1.4
Dati tecnici....................................................................................................................................21
1.5
Indicazioni sulla targhetta dei dati tecnici (targhetta identificativa)..............................................25
1.6
Codice di ordinazione ..................................................................................................................26
Progettazione .......................................................................................................................................... 27
2.1
2.1.1
2.1.2
Software di progettazione ............................................................................................................27
Tool di progettazione SIZER........................................................................................................27
Software di azionamento/di messa in servizio STARTER...........................................................29
2.2
Procedura di progettazione..........................................................................................................30
2.3
2.3.1
2.3.2
2.3.3
Dimensionamento ........................................................................................................................31
1. Chiarimenti sul tipo di azionamento.........................................................................................31
2. Definizione delle condizioni al contorno e integrazione nell'automazione...............................32
3. Definizione della condizione di carico, calcolo della coppia max. di carico, definizione
del motore ....................................................................................................................................33
Caratteristiche meccaniche dei motori ..................................................................................................... 41
3.1
3.1.1
3.1.2
3.1.3
3.1.4
Raffreddamento ...........................................................................................................................41
Circuito di raffreddamento............................................................................................................41
Progettazione del circuito di raffreddamento ...............................................................................44
Refrigerante .................................................................................................................................48
Raccordo del refrigerante ............................................................................................................50
3.2
Grado di protezione .....................................................................................................................51
3.3
Esecuzione del cuscinetto ...........................................................................................................51
3.4
Forze radiali e forze assiali ..........................................................................................................53
3.5
Estremità d'albero ........................................................................................................................57
3.6
Copertura dell'albero....................................................................................................................57
3.7
Grado di vibrazione......................................................................................................................57
3.8
Rapporto di trasmissione .............................................................................................................58
3.9
Verniciatura ..................................................................................................................................58
Dati tecnici e curve caratteristiche ........................................................................................................... 59
4.1
4.1.1
4.1.2
4.1.3
Curve caratteristiche coppia-numero di giri .................................................................................65
Altezza d'asse 150 .......................................................................................................................66
Altezza d'asse 200 .......................................................................................................................96
Altezza d'asse 280, High Torque ...............................................................................................132
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
13
Indice del contenuto
5
6
7
14
4.1.4
Altezza d'asse 280, High Speed ............................................................................................... 148
4.2
4.2.1
4.2.2
4.2.3
4.2.4
Disegni quotati .......................................................................................................................... 164
Montaggio encoder mediante cinghia dentata .......................................................................... 166
Montaggio coassiale dell'encoder ............................................................................................. 169
Senza encoder .......................................................................................................................... 172
DE senza cuscinetto ................................................................................................................. 175
Componenti del motore ......................................................................................................................... 177
5.1
Protezione termica del motore .................................................................................................. 177
5.2
5.2.1
5.2.2
5.2.3
5.2.4
5.2.5
5.2.6
Encoder (opzionale) .................................................................................................................. 180
Collegamento trasduttore per motori con interfaccia DRIVE-CLiQ .......................................... 183
Collegamento trasduttore per motori senza interfaccia DRIVE-CLiQ....................................... 183
Encoder incrementale sin/cos 1 Vpp ........................................................................................ 184
Encoder assoluto ...................................................................................................................... 186
Resolver multipolare ................................................................................................................. 188
Esecuzione motore senza encoder........................................................................................... 189
5.3
5.3.1
5.3.2
Resistenze di frenatura (funzione di frenatura mediante cortocircuito dell'armatura) .............. 190
Descrizione delle funzioni ......................................................................................................... 190
Dimensionamento delle resistenze di frenatura........................................................................ 193
Tecnica di collegamento ........................................................................................................................ 197
6.1
Periferia di azionamento SINAMICS......................................................................................... 197
6.2
Collegamento di potenza .......................................................................................................... 198
6.3
Collegamento del segnale......................................................................................................... 201
6.4
Capacità torsionale dei connettori sul motore........................................................................... 203
6.5
Avvertenze per il collegamento................................................................................................. 204
6.6
Posa dei cavi in ambienti umidi................................................................................................. 207
Avvertenze sull'uso dei motori ............................................................................................................... 209
7.1
Volume di fornitura .................................................................................................................... 209
7.2
Trasporto ................................................................................................................................... 210
7.3
Immagazzinaggio ...................................................................................................................... 211
7.4
7.4.1
7.4.2
7.4.3
7.4.4
7.4.5
7.4.6
7.4.7
7.4.8
7.4.8.1
7.4.8.2
7.4.8.3
Montaggio.................................................................................................................................. 212
Avvertenze di pericolo per il montaggio .................................................................................... 212
Sommario delle possibilità di montaggio................................................................................... 213
Esempi di possibilità di montaggio............................................................................................ 215
Montaggio della struttura del motore ........................................................................................ 217
Fissaggio e istruzioni di montaggio........................................................................................... 218
Frequenze proprie di montaggio ............................................................................................... 218
Resistenza alle vibrazioni.......................................................................................................... 219
Sistemi di bloccaggio ................................................................................................................ 220
Sistemi a serraggio esterno per il serraggio di alberi macchina ............................................... 221
Sistemi a serraggio interno per il serraggio di alberi macchina ................................................ 222
Soluzione con variante senza cuscinetto DE............................................................................ 224
7.5
7.5.1
7.5.2
7.5.3
7.5.4
Messa in servizio....................................................................................................................... 225
Provvedimenti prima della messa in servizio ............................................................................ 225
Esecuzione del ciclo di prova.................................................................................................... 227
Verifica della resistenza di isolamento...................................................................................... 227
Inserzione.................................................................................................................................. 229
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Indice del contenuto
A
7.6
7.6.1
7.6.2
7.6.3
Esercizio.....................................................................................................................................230
Pause di esercizio......................................................................................................................231
Spegnimento ..............................................................................................................................232
Anomalie ....................................................................................................................................232
7.7
7.7.1
7.7.2
7.7.3
Manutenzione.............................................................................................................................234
Avvertenze di sicurezza .............................................................................................................234
Manutenzione ordinaria .............................................................................................................235
Lubrificazione .............................................................................................................................235
7.8
7.8.1
7.8.2
Messa fuori servizio e smaltimento............................................................................................236
Smaltimento ...............................................................................................................................236
Smaltimento ...............................................................................................................................237
Appendice.............................................................................................................................................. 239
A.1
Definizione dei concetti ..............................................................................................................239
A.2
Dichiarazione di conformità........................................................................................................243
A.3
Siemens Service Center ............................................................................................................244
A.4
Bibliografia .................................................................................................................................245
A.5
Proposte/correzioni ....................................................................................................................246
Indice analitico....................................................................................................................................... 247
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
15
Indice del contenuto
16
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Descrizione del motore
1.1
1
Proprietà
Panoramica
I motori Torque 1FW3 completi sono motori sincroni ad elevato numero di poli con
eccitazione a magneti permanenti, raffreddati ad acqua e con albero cavo. Il comportamento
durante il funzionamento in linea di principio è paragonabile a quello dei più noti motori
sincroni.
Il motore Torque 1FW3 completo viene fornito come unità completa già montata. La gamma
delle tipologie comprende 3 diametri esterni in diverse lunghezze d'asse. Per il montaggio
nella struttura della macchina lo statore ed il rotore sul lato A, nelle altezze d'asse 150 e 200,
hanno una flangia con bordo di centraggio e fori filettati conformi alla forma costruttiva IM
B14. Nell'altezza d'asse (AH) 280 la flangia con bordo di centraggio e fori filettati è eseguita
in conformità alla forma costruttiva IM B35.
Insieme al sistema di azionamento SINAMICS S120 i motori Torque 1FW3 costituiscono un
potente sistema di elevata funzionalità. I sistemi encoder integrati per la regolazione di
numero di giri e posizione possono essere scelti in funzione dell'applicazione.
Figura 1-1
Motore Torque 1FW3 completo
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
17
Descrizione del motore
1.1 Proprietà
Vantaggi
● Coppia elevata con forma costruttiva compatta e spazi necessari contenuti
● Elevata sovraccaricabilità
● Assenza di elasticità nella trasmissione del moto
● Assenza di gioco all'inversione
● Elevata disponibilità in quanto nella catena di azionamento vengono a mancare gli
elementi di trasmissione meccanici soggetti ad usura
● Basso momento d'inerzia
● Collegamento diretto con la macchina tramite flangia
● Concetto di montaggio flessibile grazie all'esecuzione con albero cavo
● Risparmio di energia grazie alla riduzione delle perdite meccaniche
Campi d'applicazione
La serie costruttiva 1FW3 è stata concepita come motore diretto. Questo motore diretto
rappresenta un'unità compatta che trasferisce la potenza meccanica senza elementi di
trasmissione direttamente alla macchina operativa.
● Motori principali per estrusori
● Motori per coclee delle macchine per stampi ad iniezione
● Motori Pull-Roll delle macchine per il trascinamento dei film plastici da imballaggio
● Rulli per stiramento, di calandre, di colata e di raffreddamento
● Compiti di posizionamento dinamici, es. assi rotanti, nastri trasportatori cadenzati
● Sostituzione di motori idraulici
● Motori per rulli delle macchine da stampa
● Motori per taglierine trasversali in nastri rotativi per il trasporto di materiale, ad es. carta,
tessuti, lamiera
● Trafilatrici
● Pettini oscillanti
Requisiti di sistema
I motori Torque 1FW3 completi possono essere impiegati con i sistemi di azionamento
SINAMICS S120.
18
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Descrizione del motore
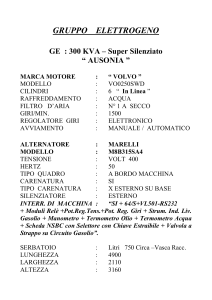
1.2 Prospetto delle coppie
1.2
Prospetto delle coppie
):[
1P
):[
1P
):[[
1P
1P
):[[
&RSSLDQRPLQDOH01.>1P@
Figura 1-2
Prospetto delle coppie 1FW3
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
19
Descrizione del motore
1.3 Caratteristiche tecniche
1.3
Caratteristiche tecniche
Tabella 1- 1
Caratteristiche tecniche
Tipo di motore
Motore sincrono con eccitazione a magneti permanenti
Materiale magnetico
Materiale magnetico a terre rare
Isolamento dell'avvolgimento statorico
(secondo EN 60034-1; IEC 60034-1)
Classe termica 155 (F) per una sovratemperatura degli avvolgimenti di ∆T = 100
K ad una temperatura in ingresso dell'acqua di raffreddamento di +30 °C.
Altitudine di installazione (secondo
IEC 60034-1)
In caso di altitudine di installazione > 1000 m s.l.m., attenersi alla
documentazione del convertitore (condizioni marginali).
Forma costruttiva (secondo
EN 60034-7; IEC 60034-7)
Altezza d'asse 150: IM B14, IM V18, IM V19
Altezza d'asse 200: IM B14, IM V18, IM V19
Altezza d'asse 280: IM B35
Grado di protezione (secondo
EN 60034-5; IEC 60034-5)
IP54
Raffreddamento (secondo
EN 60034-6; IEC 60034-6)
Raffreddamento ad acqua
Protezione termica del motore (secondo Sensore di temperatura KTY 84 nell'avvolgimento statorico
EN 60034–11; IEC 60034-11)
Verniciatura
antracite (RAL 7016)
2. Targhetta dei dati tecnici
fornita sciolta
Estremità d'albero
(secondo DIN 748-3; IEC 60072-1)
Albero cavo
Precisione dell'albero e della flangia
(secondo DIN 42955; IEC 60072-1)
Classe di tolleranza N (stato a temperatura di esercizio)
Gradi di vibrazione (secondo
EN 60034-14; IEC 60034-14)
Il livello A viene mantenuto fino al numero di giri nominale.
Livello di pressione sonora (secondo
DIN EN ISO 1680)
70 dB(A) + 3 dB(A) tolleranza con frequenza impulsi nominale 4 kHz
Sollecitazioni da urti
Accelerazione radiale max. ammessa 50 m/s2 (non durante il funzionamento)
Tipo di cuscinetto
Cuscinetto volvente con lubrificazione permanente a grasso (intervallo per la
sostituzione dei cuscinetti = 20000 h)
Sistemi encoder integrati, per motori
senza interfaccia DRIVE-CLiQ
•
Diametro interno per AH 150: di = 153 mm
Diametro interno per AH 200: di = 153 mm
Diametro interno per AH 280: di = 250 mm
•
•
•
20
Encoder incrementale sen/cos 1 Vpp, 2048 S/R1) con le tracce C e D
(encoder IC2048S/R1)), accoppiato tramite cinghia
Encoder assoluto 2048 S/R1) Singleturn, 4096 rotazioni Multiturn, con
interfaccia EnDat (encoder AM2048S/R1)), accoppiato tramite cinghia o
montaggio coassiale su NDE
Encoder assoluto Singleturn EnDat, 2048 S/R1), montaggio coassiale su
NDE
Resolver multipolare, accoppiato tramite cinghia
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Descrizione del motore
1.4 Dati tecnici
Sistemi encoder integrati, per motori
con interfaccia DRIVE-CLiQ
Encoder incrementale 22 bit (risoluzione 4194304, internamente all'encoder
2048 S/R1)) con posizione di commutazione 11 bit (encoder IC22DQ),
accoppiato tramite cinghia
Encoder assoluto 22 bit Singleturn (risoluzione 4194304, internamente
all'encoder 2048 S/R1)) + 12 bit Multiturn (campo di rilevamento 4096 giri)
(encoder AM22DQ), accoppiato tramite cinghia o montaggio coassiale su
NDE
Encoder assoluto 22 bit Singleturn (2048 S/R1))
internamente all'encoder), montaggio coassiale su NDE
Resolver 15 bit (risoluzione 32768, internamente multipolare) (R15DQ),
accoppiato tramite cinghia
•
•
•
•
Collegamento
Morsettiera per cavo di potenza
Connettori per segnali encoder e KTY 84
Opzioni
•
Protezione motore a termistori con 3 sensori di temperatura integrati per
disinserzione
Encoder, esecuzione senza encoder
Copertura dell'albero su NDE
Dispositivo di lubrificazione
Verniciatura speciale
Numero di giri nominale non normalizzato (necessaria richiesta)
•
•
•
•
•
1)
S/R = segnali/giro
1.4
Dati tecnici
Tabella 1- 2
Dati tecnici
Tipo di motore
nN
MN
IN
PN
η 3)
Mmax
Imax
nmax mecc
[1/min]
[Nm]
[A]
[kW]
[%]
[Nm]
[A]
[1/min]
ALM
425 V
1)
ALM
425 V
SLM
380 V
2)
1)
SLM
380 V
2)
1FW3150-1⃞H
300
270
100
8,0
3,1
2,8
89
200
17
1700
1FW3150-1⃞L
500
450
100
12
5,2
4,7
90
200
26
1700
1FW3150-1⃞P
750
670
100
18
7,9
7,0
90
200
41
1700
1FW3152-1⃞H
300
270
200
14
6,3
5,7
92
400
35
1700
1FW3152-1⃞L
500
450
200
22
10,5
9,4
92
400
53
1700
1FW3152-1⃞P
750
670
200
32,5
15,7
14,0
93
400
79
1700
1FW3154-1⃞H
300
270
300
20,5
9,4
8,5
93
600
49
1700
1FW3154-1⃞L
500
450
300
32
15,7
14,1
93
600
75
1700
1FW3154-1⃞P
750
670
300
47,5
23,6
21,0
93
600
113
1700
1FW3155-1⃞H
300
270
400
28
12,6
11,3
94
800
67
1700
1FW3155-1⃞L
500
450
400
43
20,9
18,8
94
800
103
1700
1FW3155-1⃞P
750
670
400
64
31,4
28,1
94
800
153
1700
1FW3156-1⃞H
300
270
500
34
15,7
14,1
94
1000
81
1700
1FW3156-1⃞L
500
450
500
53
26,2
23,6
94
1000
126
1700
1FW3156-1⃞P
750
670
500
76
39,3
35,1
94
1000
183
1700
1FW3201-1⃞E
150
140
300
13
4,7
4,4
91
555
28
1000
1FW3201-1⃞H
300
270
300
23
9,4
8,5
92
555
50
1000
1FW3201-1⃞L
500
450
300
37
15,7
14,1
92
555
82
1000
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
21
Descrizione del motore
1.4 Dati tecnici
Tipo di motore
nN
MN
IN
PN
η 3)
Mmax
Imax
nmax mecc
[1/min]
[Nm]
[A]
[kW]
[%]
[Nm]
[A]
[1/min]
ALM
425 V
1)
SLM
380 V
ALM
425 V
2)
1)
SLM
380 V
2)
1FW3202-1⃞E
150
140
500
21
7,9
7,3
93
925
47
1FW3202-1⃞H
300
270
500
37
15,7
14,1
94
925
81
1000
1000
1FW3202-1⃞L
500
450
500
59
26,2
23,6
94
925
131
1000
1FW3203-1⃞E
150
140
750
30
11,8
11,0
94
1390
69
1000
1FW3203-1⃞H
300
270
750
59
23,6
21,2
95
1390
132
1000
1FW3203-1⃞L
500
450
750
92
39,3
35,3
95
1390
204
1000
1FW3204-1⃞E
150
140
1000
40
15,7
14,7
94
1850
90
1000
1FW3204-1⃞H
300
270
1000
74
31,4
28,3
95
1850
163
1000
1FW3204-1⃞L
500
450
1000
118
52,3
47,1
95
1850
260
1000
1FW3206-1⃞E
150
140
1500
65
23,6
22,0
94
2775
145
1000
1FW3206-1⃞H
300
270
1500
118
47,1
42,4
95
2775
256
1000
1FW3206-1⃞L
500
450
1400
169
73,3
66,0
95
2775
399
1000
1FW3208-1⃞E
150
140
2000
84
31,4
29,3
94
3700
187
1000
1FW3208-1⃞H
300
270
2000
153
62,8
56,5
94
3700
340
1000
1FW3208-1⃞L
500
450
1850
226
96,8
87,2
94
3700
533
1000
1FW3281-2⃞E
150
140
2500
82
39,0
37,0
94
4050
145
1000
1000
1FW3281-2⃞G
250
220
2450
126
64,0
56,0
95
4050
226
1FW3283-2⃞E
150
140
3500
115
55,0
51,0
95
5700
203
1000
1FW3283-2⃞G
250
220
3450
176
90,0
79,0
96
5700
316
1000
1FW3285-2⃞E
150
140
5000
160
79,0
73,0
95
8150
284
1000
1FW3285-2⃞G
250
220
4950
244
130,0
114,0
96
8150
436
1000
1FW3287-2⃞E
150
140
7000
230
110,0
103,0
96
11400
406
1000
1FW3287-2⃞G
250
220
6900
352
181,0
160,0
96
11400
632
1000
1FW3281-3⃞J
400
350
2350
188
98,0
88,0
96
4050
352
1000
1FW3281-3⃞M
600
520
2200
256
138,0
123,0
96
4050
512
1000
1FW3283-3⃞J
400
350
3300
275
138,0
123,0
96
5700
516
1000
1FW3283-3⃞M
600
520
3100
357
195,0
172,0
96
5700
712
1000
1FW3285-3⃞J
400
350
4700
376
197,0
174,0
96
8150
709
1000
1FW3285-3⃞M
600
520
4400
469
276,0
248,0
97
8150
942
1000
1FW3287-3⃞J
400
350
6600
504
276,0
244,0
97
11400
946
1000
1FW3287-3⃞M
600
520
6050
696
380,0
338,0
97
11400
1424
1000
1)
2)
3)
ALM = Active Line Module
SLM = Smart Line Module
Rendimento
Motor Module
Il dimensionamento dei Motor Module per i motori 1FW3 è avvenuto in base alla corrente
nominale del motore (IN). Se è necessaria l'intera coppia di fermo del motore, è necessario
effettuare il dimensionamento in base alla corrente di fermo del motore (I0).
Se si raggiungono dei punti di lavoro temporanei al di sopra della curva caratteristica S1, è
necessario tener conto del fabbisogno di corrente dei motori e progettare un Motor Module
corrispondente. Per questo compito può essere utile il tool di progettazione Sizer Plus.
Vedere il capitolo "Progettazione".
22
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Descrizione del motore
1.4 Dati tecnici
Struttura del codice MLFB per i Motor Module
6/ 7(
%RRNVL]H
&KDVVLV
Tabella 1- 3
Assegnazione motori Torque 1FW3 - Motor Module
Tipo di motore
Corrente nominale /
Corrente da fermo
IN [A] / I0 [A]
Codice di ordinazione (MLFB)
Motor Module SINAMICS S120
Corrente nominale
Motor Module
IN [A]
Tensione di rete 3 AC 400 V, Active Line Module (UMot = 425 V)
1FW3150-1⃞H
7,2 / 7,3
6SL312⃞-⃞TE21-0AA3
9
1FW3150-1⃞L
11 / 11,5
6SL312⃞-⃞TE21-8AA3
18
1FW3150-1⃞P
17 / 17,5
6SL312⃞-1TE21-8AA3
18
1FW3152-1⃞H
14 / 15
6SL312⃞-⃞TE21-8AA3
18
1FW3152-1⃞L
22 / 22,5
6SL332⃞-1TE23-0AA3
30
1FW3152-1⃞P
32,5 / 33,5
6SL312⃞-1TE24-5AA3
45
1FW3154-1⃞H
20,5 / 21,5
6SL312⃞-1TE23-0AA3
30
1FW3154-1⃞L
32 / 33
6SL332⃞-1TE24-5AA3
45
1FW3154-1⃞P
47,5 / 49
6SL312⃞-1TE26-0AA3
60
1FW3155-1⃞H
28 / 29
6SL312⃞-1TE23-0AA3
30
1FW3155-1⃞L
43 / 45
6SL332⃞-1TE26-0AA3
60
1FW3155-1⃞P
64 / 67
6SL312⃞-1TE28-5AA3
85
1FW3156-1⃞H
34 / 35
6SL312⃞-1TE24-5AA3
45
1FW3156-1⃞L
53 / 55
6SL312⃞-1TE26-0AA3
60
1FW3156-1⃞P
76 / 80
6SL312⃞-1TE28-5AA3
85
1FW3201-1⃞E
13 / 13
6SL312⃞-⃞TE21-8AA3
18
1FW3201-1⃞H
23 / 24
6SL312⃞-1TE23-0AA3
30
1FW3201-1⃞L
37 / 38
6SL312⃞-1TE24-5AA3
45
1FW3202-1⃞E
21 / 22
6SL312⃞-1TE23-0AA3
30
1FW3202-1⃞H
37 / 39
6SL312⃞-1TE24-5AA3
45
1FW3202-1⃞L
59 / 62
6SL312⃞-1TE26-0AA3
60
1FW3203-1⃞E
30 / 32
6SL312⃞-1TE23-0AA3
30
1FW3203-1⃞H
59 / 62
6SL312⃞-1TE26-0AA3
60
1FW3203-1⃞L
92 / 100
6SL312⃞-1TE31-3AA3
132
1FW3204-1⃞E
40 / 42
6SL312⃞-1TE24-5AA3
45
1FW3204-1⃞H
74 / 77
6SL312⃞-1TE28-5AA3
85
1FW3204-1⃞L
118 / 129
6SL312⃞-1TE31-3AA3
132
1FW3206-1⃞E
65 / 68
6SL312⃞-1TE28-5AA3
85
1FW3206-1⃞H
118 / 121
6SL312⃞-1TE31-3AA3
132
1FW3206-1⃞L
169 / 189
6SL312⃞-1TE32-0AA3
200
1FW3208-1⃞E
84 / 88
6SL312⃞-1TE28-5AA3
85
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
23
Descrizione del motore
1.4 Dati tecnici
Tipo di motore
Corrente nominale /
Corrente da fermo
IN [A] / I0 [A]
Codice di ordinazione (MLFB)
Motor Module SINAMICS S120
Corrente nominale
Motor Module
IN [A]
Tensione di rete 3 AC 400 V, Active Line Module (UMot = 425 V)
1FW3208-1⃞H
153 / 160
6SL312⃞-1TE32-0AA3
200
1FW3208-1⃞L
226 / 256
6SL3320-1TE32-6AA3
260
1FW3281-2⃞E
82 / 84
6SL312⃞-1TE28-5AA3
85
1FW3281-2⃞G
126 / 131
6SL312⃞-1TE31-3AA3
132
1FW3283-2⃞E
115 / 116
6SL312⃞-1TE31-3AA3
132
1FW3283-2⃞G
176 / 181
6SL312⃞-1TE32-0AA3
200
1FW3285-2⃞E
160 / 163
6SL312⃞-1TE32-0AA3
200
1FW3285-2⃞G
244 / 251
6SL3320-1TE32-6AA0
260
1FW3287-2⃞E
230 / 234
6SL3320-1TE32-6AA0
260
1FW3287-2⃞G
352 / 365
6SL3320-1TE33-8AA0
380
1FW3281-3⃞J
188 / 200
6SL312⃞-1TE32-0AA3
200
1FW3281-3⃞M
256 / 291
6SL3320-1TE33-1AA0
310
1FW3283-3⃞J
275 / 292
6SL3320-1TE33-1AA0
310
1FW3283-3⃞M
357 / 402
6SL3320-1TE33-8AA0
380
1FW3285-3⃞J
376 / 400
6SL3320-1TE33-8AA0
380
1FW3285-3⃞M
469 / 532
6SL3320-1TE35-0AA0
490
1FW3287-3⃞J
504 / 534
6SL3320-1TE36-1AA0
605
1FW3287-3⃞M
696 / 787
6SL3320-1TE37-5AA0
745
Nota
Livello di pressione sonora in caso di riduzione della frequenza impulsi
La riduzione della frequenza degli impulsi può causare un sensibile aumento del livello di
pressione acustica.
24
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Descrizione del motore
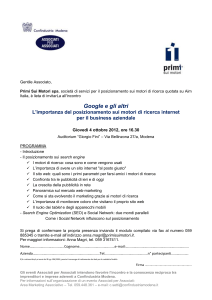
1.5 Indicazioni sulla targhetta dei dati tecnici (targhetta identificativa)
1.5
Indicazioni sulla targhetta dei dati tecnici (targhetta identificativa)
La targhetta identificativa riporta i dati tecnici validi per il motore fornito.
6,(0(16
a 0RWRU):$+$$
1R<) 8 , $
0 1P
9
9
01 1P
01 1P
,1 $
,1 $
7K&O)
(QFRGHU,
51 %
:$7(5&22/,1* /750,1
&
PNJ
86
QPD[ PLQ
Q1 PLQ 8,1 9
Q1 PLQ 8,1 9
,0%
,3
.7<
r&
0DGHLQ*HUPDQ\
(1
Figura 1-3
Struttura di principio della targhetta dei dati
Tabella 1- 4
Descrizione dei dati tecnici riportati sulla targhetta
Posizione
Descrizione / Dati tecnici
1
Tipo di motore: Motore sincrono, motore torque completo, codice di ordinazione (MLFB)
2
N. ID, codice di fabbricazione
3
Coppia da fermo
4
Umot = 340 Veff, coppia nominale, corrente nominale, numero di giri nominale, tensione
indotta
5
Umot = 425 Veff, coppia nominale, corrente nominale, numero di giri nominale, tensione
indotta
6
Classe di isolamento
7
Encoder, numero di tacche
8
Numero di revisione, codice encoder
9
Tipo di raffreddamento, dati tecnici relativi al raffreddamento
10
Norma US
11
Peso del motore [kg]
12
Grado di protezione
13
Norma CE
14
Codici 2D:
15
Identificazione termosensore
16
Forma costruttiva
17
Giri max. ammessi (Inverter) [1/min]
18
Corrente da fermo [A]
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
25
Descrizione del motore
1.6 Codice di ordinazione
1.6
Codice di ordinazione
) : ದ
ದ
$ $ =
0RWRUH7RUTXHFRPSOHWR
$OWH]]DG
DVVH
[ DOWH]]DG
DVVH
[ DOWH]]DG
DVVH
[ DOWH]]DG
DVVH
SHUDOWH]]DG
DVVH$+H
SHUDOWH]]DG
DVVHSHUQ1 (H*
SHUDOWH]]DG
DVVHSHUQ1 -H0
(QFRGHUVHQ]D'5,9(&/L4
$ HQFRGHULQFUHPHQWDOHVLQFRV9SSPRQWDJJLR ( HQFRGHUDVVROXWR0XOWLWXUQ(Q'DW65PRQWDJJLR R
1 HQFRGHUDVVROXWR6LQJOHWXUQ(Q'DW65PRQWDJJLR 6 UHVROYHUPXOWLSRODUHPRQWDJJLR (QFRGHUFRQ'5,9(&/L4
' HQFRGHULQFUHPHQWDOHELWPRQWDJJLR ) HQFRGHUDVVROXWRELW6LQJOHWXUQELW0XOWLWXUQPRQWDJJLR R
3 HQFRGHUDVVROXWRELW6,QJOHWXUQPRQWDJJLR 8 UHVROYHUELWPRQWDJJLR VHQ]D
HQFRGHU
: VHQ]DHQFRGHUlSRVL]LRQHGHOFRGLFHGLRUGLQD]LRQH 1GLJLULQRPLQDOH
(
Q PLQ
* Q PLQ
+
Q PLQ
Q PLQ
/
Q PLQ
0 Q PLQ
3
Q PLQ
0RUVHWWLHUD
XVFLWDFDYLDGHVWUD
XVFLWDFDYLDVLQLVWUD
XVFLWDFDYLODWR1'(
XVFLWDFDYLODWR'(
26
0RQWDJJLRGHOJHQHUDWRUH
GLLPSXOVL
PRQWDJJLRHQFRGHUFRDVVLDOHVXOODWR1'(
PRQWDJJLRHQFRGHUWUDPLWHFLQJKLD
)RUPD
FRVWUXWWLYD
,0%SHUDOWH]]DG
DVVHH
,0%SHUDOWH]]DG
DVVH
9DULDQWHHVHFXWLYD
$ SURWH]LRQHPRWRUHDWHUPLVWRUH
. GLVSRVLWLYRGLOXEULILFD]LRQH
7 FRSHUWXUDDOEHURVX1'(QRQQHFHVVDULDFRQHQFRGHUFRDVVLDOH
; YHUQLFLDWXUDQHURRSDFR5$/
; YHUQLFLDWXUDELDQFRFUHPD5$/
; YHUQLFLDWXUDYHUGHUHVHGD5$/
; YHUQLFLDWXUDJULJLRJKLDLD5$/
; YHUQLFLDWXUDEOXFLHOR5$/
; YHUQLFHDYRULRFKLDUR5$/
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
2
Progettazione
2.1
Software di progettazione
2.1.1
Tool di progettazione SIZER
Panoramica
Figura 2-1
SIZER
La progettazione confortevole delle famiglie di azionamenti SINAMICS e MICROMASTER 4
nonché quella dei controllori numerici CNC SINUMERIK solution line e dei controlli numerici
Motion Control SIMOTION si esegue con il tool di progettazione SIZER. Questo tool fornisce
un supporto per il dimensionamento tecnico dei componenti hardware e firmware necessari
per un compito di azionamento. SIZER comprende la progettazione del sistema di
azionamento completo e consente la gestione non solo di semplici azionamenti singoli ma
anche di quelli complessi multiasse.
SIZER supporta tutte le fasi della progettazione in un workflow:
● Progettazione dell'alimentazione da rete
● Dimensionamento dei motori e dei riduttori, compreso il calcolo degli elementi meccanici
di trasmissione
● Progettazione dei componenti dell'azionamento
● Elencazione degli accessori necessari
● Scelta delle opzioni di performance lato rete e lato motore
Nella realizzazione di SIZER è stata data particolare rilevanza alla semplicità di utilizzo e alla
funzionalità complessiva orientata ai compiti relativi agli azionamenti. Una guida utente
completa facilita l'approccio al tool. Informazioni di stato visualizzano in ogni momento lo
stato d'avanzamento della progettazione.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
27
Progettazione
2.1 Software di progettazione
La superficie operativa di SIZER è realizzata in lingua tedesca e inglese. La configurazione
dell'azionamento viene memorizzata in un progetto. Le funzioni ed i componenti utilizzati
sono rappresentati in una struttura ad albero in base alla loro correlazione. La
rappresentazione d'insieme del progetto consente la progettazione di sistemi d'azionamento
nonché la copiatura/l'immissione/la modifica di azionamenti già progettati.
Risultati della progettazione sono:
● Lista dei componenti necessari (Export in Excel)
● Dati tecnici del sistema
● Caratteristica
● Descrizione delle ripercussioni in rete
● Rappresentazione dei componenti dell'azionamento e del controllo e disegni quotati dei
motori
Questi risultati sono visualizzati in un albero dei risultati e possono essere utilizzati anche a
scopo di documentazione. Quale supporto per l'utente è disponibile un online-help
tecnologico, che fornisce le seguenti informazioni:
● dati tecnici dettagliati
● informazioni sui sistemi d'azionamento e sui relativi componenti
● criteri decisionali per la scelta dei componenti.
Requisiti minimi del sistema
● PG oppure PC con Pentium™ II 400 MHz (Windows™ 2000), Pentium™ III 500 MHz
(Windows™ XP)
● RAM da 256 Mbyte (consigliata RAM da 512 Mbyte)
● Almeno 1,7 Gbyte di memoria libera su disco rigido
● 100 Mbyte di memoria libera aggiuntiva sull'unità di sistema di Windows
● risoluzione del monitor 1024 x 768 pixel
● Windows™ 2000 SP2, XP Professional SP1, XP Home Edition SP1
● Microsoft Internet Explorer 5.5 SP2
Numeri di ordinazione per SIZER
Tabella 2- 1
Numeri di ordinazione per SIZER
Tool di progettazione
Numero di ordinazione (MLFB)
SINAMICS MICROMASTER SIZER
6SL3070-0AA00-0AG0
tedesco/inglese
28
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Progettazione
2.1 Software di progettazione
2.1.2
Software di azionamento/di messa in servizio STARTER
Il software di azionamento e messa in servizio, di semplice utilizzo, STARTER offre
● la messa in servizio,
● l'ottimizzazione e
● la diagnosi
È possibile trovare una descrizione al seguente indirizzo Intranet:
http://mall.automation.siemens.com
Selezionare il Paese e quindi la voce "Products" dal menu.
Nel Navigator scegliere "Drive Technology" → "Engineering software" → "STARTER
drive/commissioning software"
Eseguire il download dall'indirizzo http://support.automation.siemens.com
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
29
Progettazione
2.2 Procedura di progettazione
2.2
Procedura di progettazione
Motion Control
I servoazionamenti sono ottimizzati per svolgere compiti di movimentazione. Essi eseguono
movimenti lineari o rotanti nell'ambito di un ciclo di lavoro predefinito. Tutte le
movimentazioni devono essere eseguite in modo ottimale dal punto di vista temporale.
I servoazionamenti devono pertanto soddisfare le seguenti esigenze:
● elevata dinamica, cioè tempi di risposta brevi
● sovraccaricabilità, cioè elevata riserva di accelerazione
● ampio campo di regolazione, cioè elevata risoluzione per posizionamenti precisi.
Procedura generale per la realizzazione di un progetto
La base della progettazione è costituita dalla descrizione funzionale della macchina. La
definizione dei componenti è legata alle performance richieste e viene di solito eseguita nelle
seguenti fasi:
Passo
Vedere il
capitolo
seguente
Vedere il
Catalogo
30
Descrizione dell'attività di progettazione
1.
Chiarimenti sul tipo di azionamento/tipo di alimentazione
2.
Definizione delle condizioni marginali e integrazione nell'automazione
3.
Definizione del carico, calcolo della coppia di carico max., definizione del
motore
4.
Definizione del SINAMICS Motor Module
5.
Ripetizione delle fasi 3 e 4 per altri assi
6.
Calcolo della potenza del circuito intermedio necessaria e definizione del
SINAMICS Line Module
7.
Definizione delle opzioni di potenza lato rete (interruttore principale, fusibili,
filtri di rete ecc.)
8.
Definizione della performance di regolazione necessaria e scelta della
Control Unit, definizione del cablaggio dei componenti
9.
Definizione di ulteriori componenti di sistema
10.
Calcolo del fabbisogno di corrente per l'alimentazione 24V DC dei
componenti e definizione dell'alimentatore (apparecchi SITOP, Control
Supply Module)
11.
Definizione dei componenti per la tecnica di collegamento
12.
Struttura dei componenti del gruppo di azionamento
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Progettazione
2.3 Dimensionamento
2.3
Dimensionamento
2.3.1
1. Chiarimenti sul tipo di azionamento
La scelta del motore avviene sulla base della coppia necessaria che è definita dal tipo di
impiego come p.es. azionamenti di nastri trasportatori, di piattaforme di sollevamento, per
banchi prova, per centrifughe, per acciaierie e cartiere, di avanzamento o per mandrini. Si
devono inoltre tenere in considerazione i riduttori per la trasmissione del movimento o per
adattare la velocità del motore e la sua coppia alle caratteristiche del carico.
Per il calcolo della coppia che il motore deve fornire devono essere noti, oltre alla coppia di
carico che è definita dal tipo di applicazione, anche i seguenti dati meccanici:
● masse movimentate
● diametro della puleggia motrice
● passo della vite, rapporto di trasmissione
● Indicazioni sulle resistenze d'attrito
● Rendimento meccanico
● Corse di movimentazione
● Velocità massima
● Accelerazione e decelerazione massima
● Tempo di clock.
Fondamentalmente occorre decidere se si devono utilizzare motori sincroni o asincroni.
I motori sincroni sono da preferirsi in caso di spazi di installazione ridotti e momento d'inerzia
del rotore contenuto e quindi dinamica elevata. Questi motori vengono azionati con il tipo di
regolazione "Servo".
Nella progettazione occorre tener presente tra l'altro:
● il tipo di rete per l'impiego di determinati tipi di motore e/o i filtri di rete per reti IT (reti non
messe a terra)
● le temperature ambiente e l'altitudine di installazione dei motori e dei componenti
dell'azionamento.
La base per la definizione dei motori sono le curve caratteristiche limite, specifiche per tipo di
motore.
Queste descrivono l'andamento della coppia o della potenza riferito alla velocità e tengono
conto dei limiti del motore sulla base della tensione del circuito intermedio del Power/Motor
Module. La tensione del circuito intermedio è a sua volta dipendente dalla tensione di rete e,
nel caso di azionamenti a coppia, dal tipo di Line Module.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
31
Progettazione
2.3 Dimensionamento
Figura 2-2
2.3.2
Curve caratteristiche limite per i motori sincroni
2. Definizione delle condizioni al contorno e integrazione nell'automazione
Fondamentalmente occorre decidere se si devono utilizzare motori sincroni o asincroni.
I motori sincroni sono da preferirsi in caso di spazi di installazione e momento d'inerzia del
rotore contenuti e quindi dinamica elevata.
Con i motori asincroni si raggiungono elevate velocità massime nell'area di deflussaggio del
campo. I motori asincroni sono disponibili anche per potenze elevate.
Si deve inoltre definire se l'azionamento deve funzionare come monoasse o come pluriasse
con assi interdipendenti.
Nella progettazione occorre tener presente tra l'altro:
● il tipo di rete per l'impiego di determinati tipi di motore e/o i filtri di rete per reti IT (reti non
messe a terra)
● l'utilizzo del motore secondo i valori nominali per la sovratemperatura degli avvolgimenti
di 60K o 100K
● le temperature ambiente e l'altitudine di installazione del motore e dei componenti
dell'azionamento.
Ulteriori condizioni al contorno dipendono dall'integrazione dell'azionamento in un ambiente
d'automazione come SIMATIC o SIMOTION.
Per funzioni Motion Control e tecnologiche (p.es posizionamento) e per quelle di sincronismo
si utilizza il relativo sistema d'automazione p.es. SIMOTION D.
L'integrazione dell'azionamento nel sistema d'automazione sovraordinato avviene tramite
PROFIBUS.
32
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Progettazione
2.3 Dimensionamento
2.3.3
3. Definizione della condizione di carico, calcolo della coppia max. di carico,
definizione del motore
La base per la definizione dei motori sono le curve limite specifiche per il tipo di motore.
Tali curve descrivono l'andamento della coppia riferita alla velocità e tengono in
considerazione i limiti del motore sulla base della tensione di rete e della funzione di
alimentazione.
E
0>1P@
6.
Q>USP@
Figura 2-3
[b]
00RWHII
Curve limite per il motore sincrono 1FW3201-1☐E☐
SINAMICS S 120 Active Line Module, Urete eff = 400V
ವ ˂W L
0 0RWL
7
0 6.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
33
Progettazione
2.3 Dimensionamento
La definizione del motore avviene sulla base del carico richiesto dall'applicazione. Per i vari
tipi di carico si devono utilizzare diverse curve caratteristiche.
Sono definite le seguenti tipologie di funzionamento:
● Cicli di carico con durata di inserzione costante
● Cicli di carico con durata di inserzione variabile
● Ciclo di carico.
L'obiettivo è trovare punti di lavoro caratteristici per la coppia e la velocità in base ai quali
definire il motore a seconda del carico.
Dopo aver definito i tipi di funzionamento e le loro specifiche, si calcola la coppia massima
del motore. In generale questa si ricava durante la fase di accelerazione. Qui si sommano la
coppia di carico e la coppia necessaria per accelerare il motore.
Al termine occorre verificare la coppia massima del motore con le curve limite del motore.
Nella definizione del motore si devono considerare i seguenti criteri:
● Rispetto dei limiti dinamici, cioè tutti i punti coppia-velocità del carico devono trovarsi al di
sotto delle relative curve caratteristiche limite.
● I limiti termici devono essere rispettati, ovvero nel caso di motori sincroni la coppia
motore effettiva alla velocità media calcolata sulla base del ciclo di carico deve trovarsi al
di sotto della curva caratteristica S1 (funzionamento continuativo).
● Per i motori sincroni occorre assicurarsi che, alle velocità più elevate, la coppia massima
consentita del motore venga ridotta dalla curva limite di tensione. Inoltre, per sicurezza
contro le oscillazioni di tensione, si deve mantenere una distanza del 10% dalla curva
limite di tensione.
Cicli di carico con durata di inserzione costante
Nel caso di cicli di carico con durata di inserzione costante sono presenti esigenze
specifiche per l'andamento della coppia in funzione della velocità,
ad es. M = costante, M ~ n2, M ~ n oppure P = costante.
Questi azionamenti lavorano tipicamente su un punto di lavoro stazionario. Per questi si
deve eseguire un dimensionamento del carico base. La coppia del carico base deve trovarsi
al di sotto della curva S1.
Per sovraccarichi di breve durata (ad es. all'avviamento) si ha un dimensionamento del
sovraccarico. Nei motori sincroni la coppia di picco deve essere inferiore alla curva limite di
tensione.
34
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Progettazione
2.3 Dimensionamento
E
$3
0>1P@
6.
$3
$3
Q>USP@
Figura 2-4
Selezione del motore per cicli di carico con durata di inserzione costante 1FW3201-☐E☐
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
AP 1
Avviamento per, ad es., 1 min
AP 2
Funzionamento continuativo (S1) per x h (con raffreddamento ad acqua)
AP 3
Funzionamento continuativo (S1) per x h (senza raffreddamento ad acqua)
Nota
Nel funzionamento senza raffreddamento ad acqua deve essere possibile la convezione
libera.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
35
Progettazione
2.3 Dimensionamento
Cicli di carico con durata di inserzione variabile
Oltre al funzionamento continuativo (S1), per i cicli di carico con durata di inserzione
variabile sono definiti dei modi operativi intermittenti standardizzati (S3). Si tratta di un
funzionamento che comprende una serie di cicli dello stesso tipo dei quali ognuno
comprende un tempo con carico costante e una pausa.
Figura 2-5
Modo operativo S1 (funzionamento continuativo)
Figura 2-6
Modo operativo S3 (funzionamento intermittente senza influsso del processo di
avviamento)
La coppia di carico deve trovarsi al di sotto della relativa curva termica limite del motore. Nei
cicli di carico con durata di inserzione variabile deve essere preso in considerazione un
dimensionamento del sovraccarico.
Nota
Per i cicli di carico all'esterno del campo di deflussaggio si possono applicare le formule
seguenti. Per i cicli di carico all'interno del campo di deflussaggio si deve effettuare la
progettazione tramite il tool di progettazione SIZER.
36
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Progettazione
2.3 Dimensionamento
∑ M0RWL• Δt
2
M0RWHII =
L
T
n0RWN$
n0RWN(
ವ tL
T
n0RWPHGLR
E
$3
0>1P@
6.
$3
Q>USP@
[b]
SINAMICS S 120 Active Line Module, Urete eff = 400 V
AP 1
= 400 Nm a 150 giri/min
AP 2
= 0 Nm a 0 giri/min
Figura 2-7
Selezione del motore per cicli di carico con durata di inserzione costante 1FW3201-☐E☐
Nota
A motore fermo è richiesto eventualmente una coppia di arresto. La coppia di arresto deve
essere considerata con Meff. La causa potrebbe essere che i riduttori autobloccanti si
fermano.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
37
Progettazione
2.3 Dimensionamento
Ciclo di carico
Un ciclo di carico definisce l'andamento della velocità e della coppia di un motore nel tempo.
1JLUL
&RSSLD
Figura 2-8
Esempio di un ciclo di carico
Per ogni intervallo di tempo si imposta una coppia di carico. Oltre alla coppia di carico, per i
processi di accelerazione si devono prendere in considerazione il momento d'inerzia medio
del carico e il momento d'inerzia medio del motore. Eventualmente occorre prevedere una
coppia d'attrito nella direzione contraria al movimento.
Per il calcolo della coppia di carico o della coppia di accelerazione che deve essere fornita
dal motore, occorre tener conto del rapporto di riduzione e del rendimento del riduttore.
Nota
Per i cicli di carico all'esterno del campo di deflussaggio si possono applicare le formule
seguenti. Per i cicli di carico all'interno del campo di deflussaggio si deve effettuare la
progettazione tramite il tool di progettazione SIZER.
Per la coppia motore in un intervallo di tempo Δt i vale quanto segue:
M 0RWHII = (J0 +J* ) •
1
2 Δ n &DULFRL i
2 Δ n &DULFRL M
• +(J&DULFR•
•
•
+ &DULFRL + M5 ) •
i • č*
ΔtL
Δt L
Calcolo della velocità del motore
n0RWL = n &DULFRL • i
Calcolo della coppia effettiva
Calcolo della velocità media del motore
n0RWPHGLR
38
∑ M0RWL• Δt
2
M0RWHII =
L
T
n0RWN$
n0RWN(
ವ tL
T
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Progettazione
2.3 Dimensionamento
JM
Momento di inerzia del motore
JG
Momento di inerzia del riduttore
Jcarico
Momento di inerzia del carico
nCarico
Velocità del carico
i
Rapporto di riduzione
ηG
Rendimento del riduttore
Mcarico
Coppia di carico
MR
Coppia di attrito
T
Tempo di ciclo, tempo di clock
A;E
Valore iniziale, valore finale nell'intervallo di tempo Δt i
te
Durata di inserzione
Δt i
Intervallo di tempo
La coppia effettiva MMot, eff con nMot, medio deve trovarsi al di sotto della curva S1.
La coppia massima Mmax viene richiesta durante la fase di accelerazione e, nei motori
sincroni, deve trovarsi al di sotto della curva caratteristica limite di tensione/Mmax.
Riassumendo, il dimensionamento si rappresenta come segue:
E
0>1P@
6.
0
0RWHII
Q
$3
0RWPLWWHO
Q>USP@
[b]
SINAMICS S 120 Active Line Module, Urete eff = 400 V
Figura 2-9
Selezione del motore in base al ciclo di carico nel motore 1FW3201-☐E☐
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
39
Progettazione
2.3 Dimensionamento
Selezione del motore
Variando i dati è possibile trovare un motore che soddisfi pienamente le condizioni del caso
applicativo.
In secondo luogo si verifica se vengono rispettati i limiti termici. A tal fine si deve calcolare la
corrente del motore per il carico base. Nella progettazione in base al ciclo di carico con
durata di inserzione costante e sovraccarico, la corrente di sovraccarico deve essere
calcolata in riferimento alla coppia di sovraccarico richiesta. Le normative per questo calcolo
dipendono dal tipo di motore (motore sincrono, motore asincrono) e dal modo operativo
(ciclo di carico con durata di inserzione costante, ciclo di carico con durata di inserzione
intermittente, ciclo di carico) che si utilizzano.
Infine si devono definire le altre caratteristiche del motore. Queste si definiscono come
configurazioni delle opzioni motore.
40
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Caratteristiche meccaniche dei motori
3.1
3
Raffreddamento
AVVERTENZA
Gli interventi di installazione e manutenzione relativi al circuito di raffreddamento devono
essere eseguiti con l'impianto disinserito.
La posa del circuito di raffreddamento, l'installazione e la messa in servizio devono essere
eseguite esclusivamente da personale qualificato.
3.1.1
Circuito di raffreddamento
I processi elettrochimici che si svolgono in un sistema di raffreddamento devono essere
ridotti al minimo scegliendo i materiali più adatti allo scopo. Per questo motivo andrebbero
evitate, o almeno ridotte allo stretto indispensabile, le installazioni miste, cioè la
combinazione di diversi materiali, come rame, ottone, ferro, zinco o plastiche alogene (tubi
flessibili e guarnizioni in PVC).
In linea di massima si distinguono tre diversi circuiti di raffreddamento:
● circuito di raffreddamento chiuso
● circuito di raffreddamento semiaperto
● circuito di raffreddamento aperto
Tabella 3- 1
Descrizione dei diversi circuiti di raffreddamento
Definizione
Descrizione
Circuito di raffreddamento
chiuso
Il vaso di compensazione della pressione è chiuso (per impedire la
penetrazione di ossigeno) e possiede una valvola di sovrapressione. Il
refrigerante scorre solo nei motori e nei convertitori, oltre che nei
componenti necessari per la dispersione del calore.
Circuito di raffreddamento
semiaperto
L'ossigeno può penetrare nel refrigerante solo attraverso il vaso di
espansione, per il resto è uguale al circuito di raffreddamento chiuso.
Circuito di raffreddamento
aperto (Tower System)
Il raffreddamento del refrigerante avviene in una "tower". Qui avviene
un contatto significativo con l'ossigeno.
Nota
Circuiti di raffreddamento
Per i motori sono ammessi solo circuiti di raffreddamento chiusi e semiaperti. I sistemi di
convertitori devono essere collegati a monte dei motori nel circuito di raffreddamento.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
41
Caratteristiche meccaniche dei motori
3.1 Raffreddamento
*UXSSRGLUDIIUHGGDPHQWR
0DQGDWD
5LWRUQR
0DFFKLQD
0DFFKLQD
):
):
ILOWUR
,QGLFDWRUHGLSRUWDWD
9DOYRODGLVRYUDSUHVVLRQHYDOYRODGLUHJROD]LRQH
GHOODSRUWDWD
3RPSD
6HUEDWRLRDFTXDGLUDIIUHGGDPHQWR
5LOHYDPHQWRWHPSHUDWXUDDFTXDGLUDIIUHGGDPHQWR
&RPSUHVVRUHbb
FRQGHQVDWRUH
Figura 3-1
4XHVWLFRPSRQHQWLQRQVRQRLQGLVSHQVDELOL
Esempio di circuito di raffreddamento semiaperto
Compensazione del potenziale
Nel sistema di raffreddamento tutti i componenti (motore, scambiatore di calore, sistema di
tubazioni, pompa, vaso di compensazione, ecc.) devono disporre di una compensazione del
potenziale. Questa deve essere realizzata con una barra o una treccia di rame con sezioni
adeguate.
ATTENZIONE
In nessun caso le tubazioni dell'acqua devono toccare le parti che conducono tensione.
Deve essere sempre rispettata una distanza di isolamento > 13 mm! Le tubazioni devono
essere fissate meccanicamente in modo sicuro e controllate per verificarne la tenuta.
Materiali utilizzati nel circuito di raffreddamento del motore
I materiali utilizzati nel circuito di raffreddamento devono essere compatibili con i materiali
del motore.
Materiali utilizzati nel motore (materiale della camicia di raffreddamento): S355J2+N
42
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Caratteristiche meccaniche dei motori
3.1 Raffreddamento
Materiali e componenti nel circuito di raffreddamento
Nella seguente tabella sono elencati i materiali e i componenti presenti o non ammessi in un
circuito di raffreddamento.
Tabella 3- 2
Materiali e componenti di un circuito di raffreddamento
Materiale
Impiego per
Descrizione
Zinco
Tubazione, raccordo
Utilizzo non ammesso.
Ottone
Tubazione, raccordo
Utilizzabile nei circuiti chiusi con inibitore.
Rame
Tubazione, raccordo
Utilizzabile solo nei circuiti chiusi con inibitore, con
punti di sezionamento (ad es. tubi di raccordo degli
apparecchi) tra radiatore e componente in rame.
Acciaio normale (ad es. St37)
Tubazione
Permesso nei circuiti chiusi e semiaperti con inibitori o
Antifrogen N; controllare la formazione di ossido, si
raccomanda una finestra di ispezione.
Acciaio colato, ghisa grigia
Tubazioni, motori
Circuiti chiusi e impiego di filtri e di filtri di lavaggio a
controcorrente. Nei radiatori in acciaio legato,
separatori Fe.
Acciaio ad alta lega gruppo 1 (V2A) Tubazione, raccordo
Può essere impiegato per acque potabili e acque
chiare con contenuto di cloruro < 250 ppm,
conformemente alla definizione fornita nel capitolo
"Definizione del refrigerante".
Acciaio ad alta lega gruppo 2 (V4A) Tubazione, raccordo
Può essere impiegato per acque potabili e acque
chiare con contenuto di cloruro < 500 ppm,
conformemente alla definizione fornita nel capitolo
"Definizione del refrigerante".
ABS Acril-nitrile-butadiene-stirolo
Tubazione, raccordo
Adatto per la definizione fornita nel capitolo
"Definizione del refrigerante". Adatto per miscele con
inibitore e/o biocidi, nonché Antifrogen N.
Impianti realizzati con materiali
diversi (installazioni miste)
Tubazione, raccordo
Utilizzo non ammesso.
PVC
Tubazione, raccordo, tubi
flessibili
Utilizzo non ammesso.
Tubi flessibili
Ridurre al minimo l'impiego di tubi flessibili (per il
collegamento degli apparecchi). Non devono essere
impiegati per il collegamento principale dell'intero
sistema. Raccomandazione: tubi flessibili EPDM con
resistenza elettrica >109 Ω (ad es. Semperflex FKD;
ditta Semperit o DEMITTEL; in PE/EPDM, ditta Telle)
Guarnizioni
Tubazione, raccordo
Consigliato l'uso di Viton, AFM34, EPDM.
Collegamenti con tubi flessibili
Raccordo di
tubo o tubo flessibile
Fissaggio con morsetti serracavo secondo DIN2817,
ad es. della ditta Telle.
Per una durata ottimale dei radiatori del motore (carcassa), rispettare la raccomandazione
seguente:
● Installare un circuito di raffreddamento chiuso con gruppo di raffreddamento in acciaio
legato che disperda il calore tramite uno scambiatore di calore acqua-acqua.
● Tutti gli altri componenti come le tubazioni del circuito di raffreddamento e i giunti devono
essere realizzati in ABS, acciaio legato o acciaio da costruzione generico.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
43
Caratteristiche meccaniche dei motori
3.1 Raffreddamento
Produttori dei gruppi di raffreddamento
BKW Kälte-Wärme-Versorgungstechnik GmbH
http://www.bkw-kuema.de
DELTATHERM Hirmer GmbH
http://www.deltatherm.de
Glen Dimplex Deutschland GmbH
http://www.riedel-cooling.com
Helmut Schimpke und Team Industriekühlanlagen http://www.schimpke.org
GmbH + Co. KG
Hydac System GmbH
http://www.hydac.com
Hyfra Industriekühlanlagen GmbH
http://www.hyfra.de
KKT Kraus Kälte- und Klimatechnik GmbH
http://www.kkt-kraus.de
Pfannenberg GmbH
http://www.pfannenberg.com
Rittal GmbH & Co. KG
http://www.rittal.de
Nota
Naturalmente si possono utilizzare anche prodotti equivalenti di altri fornitori. Le ditte
menzionate sopra non sono in alcun modo imposte, ma solo consigliate. Siemens non si
assume alcuna responsabilità per la qualità dei prodotti di terze parti.
3.1.2
Progettazione del circuito di raffreddamento
Pressione
La pressione di esercizio deve essere determinata in funzione dei rapporti del flusso di
mandata e di ritorno del circuito di raffreddamento. La quantità di refrigerante necessaria per
unità di tempo deve essere impostata in base ai dati tecnici degli apparecchi e dei motori.
La pressione massima ammessa nel radiatore rispetto all'ambiente e quindi nel circuito di
raffreddamento non deve superare 0,6 MPa (6 bar). Se viene utilizzata una pompa che
raggiunge una pressione più elevata, sul lato impianto occorre prendere adeguati
provvedimenti (valvola di sicurezza p ≤ 0,6 MPa, regolazione della pressione o simili) che
impediscano il superamento della pressione massima.
La differenza di pressione tra il refrigerante nel circuito di mandata e di ritorno deve essere
ridotta al minimo in modo tale che le pompe possano essere utilizzate con caratteristica
piatta.
Per evitare intasamenti e corrosione si raccomanda di prevedere inoltre un filtro di lavaggio a
controcorrente nel circuito di raffreddamento. Questo permette di eliminare eventuali
materiali accumulatisi durante il funzionamento.
Compensazione della pressione
Quando nel circuito di raffreddamento sono collegati diversi componenti, può essere
necessaria una compensazione della pressione. All'uscita del refrigerante del motore o dei
componenti interessati devono essere installate valvole a farfalla.
44
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Caratteristiche meccaniche dei motori
3.1 Raffreddamento
Come evitare la cavitazione
Il calo di pressione su un convertitore o motore non deve superare 0,2 MPa nel
funzionamento continuo. In caso contrario il flusso volumetrico elevato può provocare danni
da cavitazione e abrasione.
Collegamento in serie di motori
Il collegamento in serie di motori può essere consigliato solo a determinate condizioni per i
seguenti motivi:
● i flussi volumetrici necessari dei motori si trovano nello stesso ordine di grandezza (<
fattore 2)
● il riscaldamento del refrigerante può provocare un derating nel secondo o nel terzo
motore nel caso in cui venga superata la temperatura di ingresso massima del
refrigerante.
Temperatura di ingresso del refrigerante
La temperatura di ingresso del refrigerante deve essere scelta in modo che non si formi
alcuna condensa sulla superficie del motore: Traff > Tamb - 5 K
I motori sono dimensionati per il funzionamento con una temperatura massima del
refrigerante di +30 °C nel rispetto di tutti i dati del motore. Con altre temperature di mandata
la corrente permanente varia (vedere la tabella "Fattori di derating").
Tabella 3- 3
Fattori di derating
Temperatura di ingresso del
refrigerante
Fattore di derating
≤ 30 °C
35 °C
40 °C
45 °C
1,0
0,97
0,95
0,92
Potenze frigorifere da dissipare e flusso volumeterico di refrigerante
I valori indicati nella tabella "Potenza di raffreddamento da dissipare" si riferiscono ad una
temperatura del refrigerante di +30 °C e al funzionamento S1.
La potenza di raffreddamento da dissipare indicata nella tabella [kW] si riferisce alla potenza
dissipata alla velocità nominale massima nella rispettiva altezza d'asse:
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
45
Caratteristiche meccaniche dei motori
3.1 Raffreddamento
Tabella 3- 4
Potenza di raffreddamento da dissipare
Tipo di motore
Potenza di
raffreddamento da
dissipare con nN [kW]
Differenza max. di
temperatura nel canale
di raffreddamento [K]
Perdita di pressione
[bar]
Flusso volumetrico di
refrigerante [l/min]
1FW3150-
1,4
10
0,1
2,0
1FW3152-
1,6
10
0,1
3,0
1FW3154-
2,3
10
0,1
4,5
1FW3155-
2,7
10
0,2
5,5
1FW3156-
3,4
10
0,4
7,0
1FW3201-
1,7
10
0,1
3,0
1FW3202-
2,3
10
0,2
4,0
1FW3203-
3,4
10
0,1
5,0
1FW3204-
3,9
10
0,1
6,0
1FW3206-
5,5
10
0,3
8,0
1FW3208-
8,4
10
0,5
9,0
1FW3281-2
7,4
10
0,3
10,0
1FW3283-2
10,0
10
0,6
13,0
1FW3285-2
12,9
10
1,0
18,0
1FW3288-2 .
16,4
10
1,8
25,0
1FW3281-3
6,3
10
0,3
10,0
1FW3283-3
8,1
10
0,6
13,0
1FW3285-3
10,4
10
1,0
18,0
1FW3288-3 .
14,5
10
1,8
25,0
'HFUHDVHLQSUHVVXUH>DWP@
'UXFNDEIDOO>EDU@
):
):
):
):
):
'XUFKIOXVVPHQJH>OPLQ@
)ORZUDWH>OPLQ@
Figura 3-2
46
Portata per altezza d'asse 150
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Caratteristiche meccaniche dei motori
3.1 Raffreddamento
'HFUHDVHLQSUHVVXUH>DWP@
'UXFNDEIDOO>EDU@
):
):
):
):
):
):
'XUFKIOXVVPHQJH>OPLQ@
)ORZUDWH>OPLQ@
Figura 3-3
Portata per altezza d'asse 200
'HFUHDVHLQSUHVVXUH>DWP@
'UXFNDEIDOO>EDU@
):
):
):
):
'XUFKIOXVVPHQJH>OPLQ@
)ORZUDWH>OPLQ@
Figura 3-4
Portata per altezza d'asse 280
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
47
Caratteristiche meccaniche dei motori
3.1 Raffreddamento
3.1.3
Refrigerante
Tabella 3- 5
Specifica dell'acqua da utilizzare come refrigerante
Qualità dell'acqua come refrigerante per motori con parti in
alluminio, tubi in acciaio legato + ghisa grigia o camicia in acciaio
Ioni cloruro
< 40 ppm, eventualmente da raggiungere con l'aggiunta di acqua
deionizzata.
Ioni solfato
< 50 ppm
Ioni nitrato
< 50 ppm
Valore pH
6 ... 9 (6 ... 8 se alluminio)
Conducibilità elettrica
< 500 μS/cm
Durezza totale
< 170 ppm
Nota
Si consiglia di utilizzare acqua deionizzata con conducibilità ridotta (5 ... 10 µS/cm) (chiedere
eventualmente i valori all'ente fornitore). Conformemente alla direttiva 98/83/CE, l'acqua
potabile può contenere una quantità di cloruro massima di 2500 ppm!
Per l'analisi dell'acqua disponibile sul lato impianto, i produttori possono servirsi di additivi
chimici.
Tabella 3- 6
Qualità del refrigerante
Qualità del refrigerante
Acqua di raffreddamento
Secondo la tabella "Specifica dell'acqua da utilizzare come
refrigerante"
Protezione contro la corrosione
0,2 ... 0,25 % di Inhibitor Nalco TRAC100 (in precedenza 0GE056)
Protezione antigelo
Se necessario 20 - 30 % di Antifrogen N (marca Clariant)
Sostanze in soluzione
< 340 ppm
Grandezza delle particelle
trasportate
< 100 μm
Nota
L'inibitore è superfluo se è garantita una percentuale di Antifrogen N > 20 %.
Se la percentuale di antigelo è < 30 %, non è necessario un derating.
48
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Caratteristiche meccaniche dei motori
3.1 Raffreddamento
Biocida
I circuiti di raffreddamento chiusi con acqua dolce sono un ambiente favorevole per la
proliferazione di microbi. Nei sistemi con acqua potabile addizionata di cloro, il pericolo di
corrosione causato dalla presenza dai microbi è praticamente eliminato.
L'Antifrogen N ha un'azione biocida a partire dalla concentrazione minima >20 %. Con
l'aggiunta di Antifrogen N in percentuale >20 % i batteri non sono in grado di sopravvivere.
La scelta del biocida adeguato avviene in funzione del tipo di microbi. Nella pratica si
osserva la presenza dei seguenti microbi:
● batteri che producono mucillagine
● batteri corrosivi
● batteri ferro-ossidanti
Si raccomanda di eseguire un'analisi dell'acqua almeno una volta all'anno per determinare la
presenza e la quantità di colonie batteriche. I biocidi adatti possono essere richiesti ad es. al
produttore Nalco. Per la dosatura e la compatibilità con un inibitore eventualmente presente
occorre rispettare le raccomandazioni del produttore.
ATTENZIONE
Gli inibitori non devono essere mischiati con i biocidi e Antifrogen N.
Sul mercato sono disponibili altri produttori di additivi chimici. Possono essere utilizzati
anche prodotti equivalenti di altri fornitori. L'idoneità deve essere eventualmente accertata
tramite test.
Altri refrigeranti (non a base di acqua)
Se vengono utilizzati altri liquidi refrigeranti (ad es. olio), può rendersi necessaria una
riduzione della potenza per non superare la soglia termica del motore. La riduzione di
potenza può essere calcolata sulla base dei seguenti dati a una temperatura di 30 °C:
Densità
ρ
[kg/m3]
Capacità calorifica specifica
cρ
[J/(kg•K)]
Conduttività termica
λ
[W/(K•m)]
Viscosità cinematica
ν
[m2/s]
Portata
V
[l/min]
In questo caso rivolgersi al produttore (Siemens Service Center).
Nota
In caso di miscela acqua-olio con una percentuale di olio inferiore al 10% non è ancora
necessario ridurre la potenza del motore.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
49
Caratteristiche meccaniche dei motori
3.1 Raffreddamento
Produttori di additivi chimici
Tyforop Chemie GmbH
http://www.tyfo.de
Clariant Produkte Deutschland GmbH
http://www.antifrogen.de
Cimcool Industrial Products
http://www.cimcool.net
FUCHS PETROLUB AG
http://www.fuchs-oil.com
Hebro chemie GmbH
http://www.hebro-chemie.de
HOUGHTON Deutschland GmbH
http://www.houghton.com
Nalco Deutschland GmbH
http://www.nalco.com
Nota
Naturalmente si possono utilizzare anche prodotti equivalenti di altri fornitori. Le ditte
menzionate sopra non sono in alcun modo imposte, ma solo consigliate. Siemens non si
assume alcuna responsabilità per la qualità dei prodotti di terze parti.
Manutenzione e riparazione
Almeno una volta all'anno si raccomanda di verificare il livello del refrigerante e di controllare
eventuali variazioni del colore o fenomeni di intorbidimento. A cadenza annuale occorre
inoltre verificare che il refrigerante sia conforme alle specifiche ammesse.
In caso di perdita del refrigerante in circuiti chiusi o semiaperti, questa va corretta con una
miscela precedentemente preparata di acqua deionizzata e inibitore o Antifrogen N.
3.1.4
Raccordo del refrigerante
Il collegamento del motore al circuito di raffreddamento avviene tramite due filettature interne
sul lato posteriore del motore. Si può scegliere liberamente se collegare la mandata o il
ritorno a ciascuno dei due raccordi.
Raccomandazione: Mandata su NDE.
Raccordo per l'acqua di raffreddamento
per 1FW315x e 1FW320x
G 1/2"
per 1FW328x
G 1"
Il collegamento degli apparecchi deve essere eseguito con tubi flessibili per evitare un
accoppiamento rigido (vedere la tabella "Materiali e componenti di un circuito di
raffreddamento").
Messa in servizio
Se necessario, prima di collegare i motori e i convertitori al circuito di raffreddamento si può
eseguire un lavaggio delle tubazioni allo scopo di evitare l'accumulo di sporcizia nei motori e
nei convertitori.
Dopo il montaggio dell'apparecchio nell'impianto, è necessario attivare il circuito di
raffreddamento prima di applicare tensione.
50
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Caratteristiche meccaniche dei motori
3.2 Grado di protezione
3.2
Grado di protezione
L'indicazione del grado di protezione secondo EN 60034-5 (IEC 60034-5) è costituita dalle
lettere IP seguite da due cifre.
IP = International Protection
1ª cifra = protezione contro corpi estranei
2ª cifra = protezione contro l'acqua
Poiché nelle macchine utensili e nelle macchine transfer vengono per lo più utilizzati
refrigeranti oleosi e/o aggressivi, la sola protezione contro l'acqua non è sufficiente. I motori
devono essere protetti con adeguate coperture.
Quando si sceglie il grado di protezione del motore occorre prestare attenzione a
un'adeguata tenuta dell'albero motore.
I motori Torque 1FW3 completi sono realizzati secondo il grado di protezione IP54.
3.3
Esecuzione del cuscinetto
I cuscinetti dei motori Torque completi sono a lubrificazione permanente e dimensionati per
una temperatura ambiente minima di funzionamento di -15 °C.
Tabella 3- 7
Esecuzione normale con cuscinetto standard
Montaggio struttura
Altezza d'asse 150 - 200
Altezza d'asse 280
IM B14, IM V18/19
IM B35
Collegamento rotore
Fori filettati lato frontale, elemento di bloccaggio
Posizioni d'installazione
Tipi di cuscinetto (secondo DIN 625)
Durata del cuscinetto (lubrificazione
permanente a grasso)
Esecuzioni speciali
orizzontale, verticale
orizzontale
Cuscinetto fisso su DE: 61838
Cuscinetto mobile su NDE: 61832
Cuscinetto fisso su DE: 61864
Cuscinetto mobile su NDE: 61856
massimo 20000 h con temperature ambiente di max. 40 °C
Esecuzioni speciali per forze radiali e assiali su richiesta.
Tipici utilizzi
Settore meccanico in generale
Nota
Per cuscinetti privi di dispositivo di rilubrificazione si consiglia di sostituire i cuscinetti dopo
circa 20000 ore di esercizio a una temperatura ambiente max. di 40 °C, tuttavia al più tardi
dopo 5 anni (dalla fornitura).
Dispositivo di lubrificazione (opzione per 1FW315x e 1FW320x)
In caso di necessità, i motori Torque 1FW3 completi possono essere dotati dell'opzione di
lubrificazione con ingrassatore sferico M8 x 1 secondo DIN 71412-A per i cuscinetti su DE e
NDE. In questo modo, se vengono rispettati gli intervalli di lubrificazione (vedere tabella
seguente) e se non viene superata la temperatura ambiente di 40 °C, l'intervallo di
sostituzione dei cuscinetti aumenta a circa 40000 h.
Possibilità di ordinazione: Codice K40
Il dispositivo di lubrificazione non può essere montato in un secondo tempo!
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
51
Caratteristiche meccaniche dei motori
3.3 Esecuzione del cuscinetto
Tabella 3- 8
Cuscinetto con dispositivo di lubrificazione (opzione per 1FW315x e 1FW320x)
nN [1/min]
Durata dei
cuscinetti con
dispositivo di
lubrificazione
[h]
Intervallo di
lubrificazione
[h]
Quantità di
grasso 1) su
DE [g]
Quantità di
grasso 1) su
NDE [g]
1FW315x
300/500/750
40000
10000
30
20
1FW320x
150/300/500
40000
10000
30
20
150/250
40000
10000
80
60
400
40000
6500
80
60
600
24000
4000
80
60
Motore
1FW328x-2
1FW328x-3
1)
Definizione del grasso dei cuscinetti: Klüberquiet BQH72-102
Nota
È opportuno che la lubrificazione venga effettuata manualmente utilizzando un ingrassatore
a siringa (non una pressa idraulica). Rispettare le quantità di grasso. È opportuno che la
lubrificazione avvenga quando il motore è in funzione a basso regime e in assenza di
condizioni di pericolo per le persone. Gli intervalli di lubrificazione consigliati sono validi per
carichi normali:
• Funzionamento con numero di giri conforme alle indicazioni riportate sulla targhetta dei
dati tecnici
• Funzionamento a ridotta presenza di vibrazioni
• Utilizzo di grassi specifici per cuscinetti a rulli
Esecuzioni speciali
Fattori che influiscono sfavorevolmente, legati ad es. al montaggio, ai numeri di giri, a modi
operativi speciali o a carichi meccanici elevati, potrebbero richiedere una considerazione
particolare. Rivolgersi alla propria rappresentanza Siemens competente indicando le
condizioni marginali.
52
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Caratteristiche meccaniche dei motori
3.4 Forze radiali e forze assiali
3.4
Forze radiali e forze assiali
Punto di applicazione delle forze radiali FR sul motore Torque
● per velocità di funzionamento medie
● per durata nominale del cuscinetto di 20000 h
;>PP@
)5 >1@
WRUTXHPRWRU
):
0D¡;
$EVWDQG]ZLVFKHQGHP$QJULIIVSXQNWGHU.UDIW)XQGGHU:HOOHQVFKXOWHUGHV7RUTXHPRWRUV
5
'LPHQVLRQ;
'LVWDQFHEHWZHHQWKHSRLQWRIDSSOLFDWLRQRIWKHIRUFH)DQGWKHVKDIWVKRXOGHURIWKHWRUTXHPRWRU
5
Figura 3-5
Punto di applicazione della forza FR
ATTENZIONE
Se si utilizza il diagramma delle forze assiali, va rispettata la forza radiale max. consentita.
Il diagramma delle forze assiali è valido per x < 100 mm.
Nel dimensionamento dei cuscinetti occorre scegliere la velocità di funzionamento del
motore in base alla curva di velocità immediatamente superiore.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
53
Caratteristiche meccaniche dei motori
3.4 Forze radiali e forze assiali
Diagramma delle forze radiali per 1FW315❑
530
530
530
UDGLDOIRUFH>1@
GLVWDQFH[>PP@
Figura 3-6
Diagramma delle forze radiali per 1FW315❑, per durata nominale del cuscinetto di
20000 h
Diagramma delle forze assiali per 1FW315❑
530
530
530
UDGLDOIRUFH>1@
D[LDOIRUFH>1@
Figura 3-7
54
Forza assiale ammessa in funzione della forza radiale per 1FW315❑
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Caratteristiche meccaniche dei motori
3.4 Forze radiali e forze assiali
Diagramma delle forze radiali per 1FW320❑
530
UDGLDOIRUFH>1@
530
GLVWDQFH[>PP@
Figura 3-8
Diagramma delle forze radiali per 1FW320❑, per durata nominale del cuscinetto di
20000 h
Diagramma delle forze assiali per 1FW320❑
530
530
UDGLDOIRUFH>1@
D[LDOIRUFH>1@
Figura 3-9
Forza assiale ammessa in funzione della forza radiale per 1FW320❑
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
55
Caratteristiche meccaniche dei motori
3.4 Forze radiali e forze assiali
Diagramma delle forze radiali per 1FW328❑
530
UDGLDOIRUFH>1@
GLVWDQFH[>PP@
Figura 3-10
Diagramma delle forze radiali per 1FW328❑, per durata nominale del cuscinetto di
20000 h
Diagramma delle forze assiali per 1FW328❑
530
UDGLDOIRUFH>1@
D[LDOIRUFH>1@
Figura 3-11
56
Forza assiale ammessa in funzione della forza radiale per 1FW328❑
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Caratteristiche meccaniche dei motori
3.5 Estremità d'albero
3.5
Estremità d'albero
L'estremità dell'albero è eseguita come un albero cavo (vedere i disegni quotati). È
disponibile con i seguenti diametri interni:
● Diametro interno 1FW315x: di = 153 mm
● Diametro interno 1FW320x: di = 153 mm
● Diametro interno 1FW328x: di = 250 mm
Il senso di rotazione positivo ha rotazione destrorsa (vista su DE, lato flangia).
3.6
Copertura dell'albero
Se l'albero cavo passante non viene utilizzato dal cliente e deve essere chiuso sul lato NDE
per proteggerlo dal contatto, il motore può essere fornito con una copertura dell'albero sul
lato NDE.
Possibilità di ordinazione: Codice T20
3.7
Grado di vibrazione
I motori soddisfano un grado di vibrazione di livello A secondo EN 60034-14 (IEC 60034-14).
I valori di vibrazione indicati si riferiscono al solo motore. Le vibrazioni del sistema dovute
all'installazione possono causare un aumento di questi valori per il motore.
Il livello del grado di vibrazione viene rispettato fino alla velocità nominale (nN).
YHIIDPP >PPV@
/LYHOOR$
Figura 3-12
Q>PLQ@
Grado di vibrazione
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
57
Caratteristiche meccaniche dei motori
3.8 Rapporto di trasmissione
3.8
Rapporto di trasmissione
Tabella 3- 9
Rapporto di trasmissione con montaggio encoder mediante cinghia dentata tra encoder
e albero cavo
Altezza d'asse
i
Osservazioni
1FW315⃞
-3,5
Gli encoder sono collegati all'albero motore mediante
trasmissione a cinghia (cinghia dentata). Poiché il senso
di rotazione dell'encoder è contrario rispetto al motore, il
segno iniziale del rapporto di trasmissione sarà negativo.
1FW320⃞
-3,5
1FW328⃞
-5
Durata utile della cinghia dentata: almeno 10000 h.
3.9
Verniciatura
I motori Torque 1FW3 completi vengono forniti con verniciatura antracite (simile a RAL
7016).
Opzione: Verniciatura speciale.
58
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
4
Dati tecnici e curve caratteristiche
Il range operativo consentito è limitato da fattori termici, meccanici ed elettromagnetici.
0 PD[
&XUYDFDUDWWHULVWLFDOLPLWHGL
WHQVLRQH'HIOXVVDJJLRGHOFDPSR
)XQ]LRQDPHQWR
LQWHUPLWWHQWH6
&XUYDFDUDWWHULVWLFDOLPLWHGL
WHQVLRQHOLPLWD]LRQHPHGLDQWHOD
WHQVLRQHGHOFLUFXLWRLQWHUPHGLR
0>1P@
0 /LPLWH
0 .
0 1.
6.
)XQ]LRQDPHQWR
FRQWLQXDWLYR6
Q1
Figura 4-1
Q>USP@
Caratteristica di coppia dei motori sincroni
Campo di temperatura ammesso per l'avvolgimento
Il surriscaldamento del motore è causato dalle perdite che si verificano nel motore stesso
(perdite dovute alla corrente, perdite di ferro, perdite per attrito).
Caratteristica di coppia del motore
Il valore di coppia consentito dipende dalla sovratemperatura dell'avvolgimento consentita
(100°K) e quindi dal modo operativo. Per rispettare i limiti di temperatura è necessario che,
partendo dalla coppia da fermo M0, la coppia venga ridotta aumentando la velocità.
Le curve caratteristiche indicate si riferiscono al funzionamento continuativo S1 (100 K).
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
59
Dati tecnici e curve caratteristiche
AVVERTENZA
Un funzionamento continuativo nel campo al di sopra della curva caratteristica S1 non è
ammissibile termicamente per il motore.
Il campo di velocità è limitato dai seguenti elementi:
● velocità massima consentita (a livello meccanico) nmax mecc (forze centrifughe sul rotore,
durata del cuscinetto) oppure
● velocità massima consentita sul convertitore nmax Inv (rigidità dielettrica del convertitore e/o
del motore)
Esecuzioni dell'avvolgimento
Nell'ambito della grandezza costruttiva di un motore sono possibili varie esecuzioni
dell'avvolgimento (esecuzioni con circuito dell'indotto) per diverse velocità nominali nN.
Tabella 4- 1
Lettera identificativa per l'esecuzione dell'avvolgimento
Numero di giri nominale nN
[1/min]
Esecuzione dell'avvolgimento
(10. Posizione del numero di ordinazione)
150
E
250
G
300
H
400
J
500
L
600
M
750
P
Tensione di uscita del convertitore
Le tensioni di uscita del convertitore sono diverse a seconda del tipo di convertitore e della
tensione di rete.
Tabella 4- 2
Tensioni di uscita del convertitore
Tipo di convertitore
SINAMICS S120
3AC 380 - 480 V
Rete
Tensione
Tensione del
circuito
intermedio
Tensione di
uscita
Urete
Ucirc.int
Umot
ALM
400 V
600 V
425 V
SLM
400 V
528 V
380 V
SLM
480 V
634 V
460 V
Alimentazione
Modulo
Il convertitore SINAMICS S120 imprime una corrente di deflussaggio in modo da rendere
possibile il funzionamento del motore al di sopra della curva caratteristica limite di tensione,
senza deflussaggio del campo. La procedura con cui il convertitore imprime la corrente di
deflussaggio influenza in modo determinante l'andamento della curva.
60
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
Limite di coppia in caso di funzionamento con convertitore con funzione di deflussaggio del campo.
La curve caratteristiche rappresentate si riferiscono al funzionamento con SINAMICS S120.
Con il SINAMICS S120 il funzionamento con deflussaggio del campo è sempre attivo.
L'andamento delle curve caratteristiche con deflussaggio del campo dipende dalla posizione
della curva caratteristica limite di tensione. Ogni curva caratteristica limite di tensione è
associata quindi ad un diagramma coppia-velocità.
0>1P@
0PD[
&XUYDFDUDWWHULVWLFDOLPLWHGLWHQVLRQH
DVHFRQGDGHOO
HVHFX]LRQHGHOFLUFXLWRG
DUPDWXUD
HGHOODWHQVLRQHGHOFRQYHUWLWRUH
0PD[,QY
0.
0.
VHQ]DGHIOXVVDJJLRGHOFDPSR
6
6
6
6.
6.
,QWHUYDOORGL
GHIOXVVDJJLRGHOFDPSR
Q
PD[,QY
QPD[PHFK
01.
Q 1
Figura 4-2
Caratteristica di coppia di un motore sincrono nel funzionamento con convertitore con
deflussaggio del campo (curva esemplificativa)
Il campo di velocità consentito è stato limitato a nmax Inv.
Convertitore consigliato
La curva caratteristica Mmax Inv indica il campo di funzionamento che può essere raggiunto
con il convertitore consigliato. Il convertitore consigliato è dimensionato in modo tale da
rendere possibile il funzionamento S1(100K) rappresentato. Se serve una coppia fino a
Mmax, scegliere il convertitore immediatamente superiore.
Le curve caratteristiche S1 e S3 valgono per il funzionamento con la corrente termica
consentita. Nella progettazione del funzionamento S3 verificare se il convertitore può fornire
la corrente di picco necessaria, eventualmente scegliere un convertitore più grande.
Se si utilizza un convertitore più piccolo, non si raggiungono più le curve caratteristiche
indicate nel campo di deflussaggio.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
61
Dati tecnici e curve caratteristiche
Limite delle coppie in caso di funzionamento sul convertitore senza possibilità di campo di
deflussaggio
Con l'aumento della velocità aumenta la tensione indotta nell'avvolgimento del motore. Per
imprimere la corrente si ha a disposizione la differenza della tensione del circuito intermedio
del convertitore rispetto alla tensione indotta del motore.
Per i convertitori senza possibilità di deflussaggio del campo ciò limita l'entità della corrente
imprimibile. In questo modo, a velocità elevate la coppia diminuisce rapidamente. Tutti i punti
di funzionamento raggiungibili a livello di motore si trovano a sinistra della curva
caratteristica limite di tensione.
L'andamento della curva caratteristica limite di tensione è determinato dall'esecuzione
dell'avvolgimento e dall'entità della tensione di uscita del convertitore.
Le curve caratteristiche vengono raffigurate per ogni esecuzione dell'avvolgimento in un
apposito foglio dati (vedere il capitolo "Curve caratteristiche coppia-numero di giri"). A ogni
foglio dati sono poi assegnati i diagrammi coppia-numero di giri per le diverse tensioni di
uscita del convertitore.
Nota
La curva caratteristica limite di tensione di un motore con velocità nominale pari a 600
giri/min supera di molto quella di un motore dello stesso tipo con una velocità nominale di
200 giri/min. Tuttavia questo motore necessita, per la stessa coppia nominale, di una
corrente decisamente superiore.
Per questo è opportuno scegliere la velocità nominale in modo tale che essa non sia di molto
superiore alla velocità massima indispensabile per le operazioni da eseguire.
In questo modo è possibile ridurre al minimo le dimensioni del modulo convertitore (corrente
di uscita).
Traslazione della curva caratteristica del limite di tensione
ATTENZIONE
Lo spostamento della caratteristica del limite di tensione vale solo per le curve
caratteristiche limite approssimativamente lineari come ad es. per i motori della serie
costruttiva 1FK3. Una traslazione della curva caratteristica limite di tensione è possibile
solo se viene soddisfatta la condizione Umot, nuova > UiN.
La tensione indotta UiN va letta sulla targhetta dei dati del motore oppure calcolata:
UiN = kE ∙ nN / 1000
Per conoscere i limiti del motore con una tensione di uscita del convertitore (Umot) diversa da
380 V, 425 V o 460 V, la relativa curva caratteristica limite di tensione tracciata deve essere
traslata per la corrispettiva nuova tensione di uscita (Umot, nuova).
L'entità della traslazione si ricava come descritto qui di seguito:
sull'asse X (velocità) si ricava con una tensione di uscita di Umot, nuova una traslazione del
fattore:
8 0RWQXRYR
= nuova tensione di uscita del convertitore
Umot,
80RW
nuova
Umot
62
=
Tensione di uscita del convertitore dalla curva caratteristica per
380 V, 425 V o 460 V
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
Calcolo della nuova coppia limite con una nuova curva caratteristica limite
1XRYDWHQVLRQHGLXVFLWDGHOFRQYHUWLWRUH80RWQXRYR
7HQVLRQHGLXVFLWD8GHOFRQYHUWLWRUH 0RW
3
0>1P@
0/LPLWH
6. &XUYDFDUDWWHULVWLFD
WHUPLFD
3
0 /LPLWH
QXRYR
Q
P1
3
Q
3
Q
Q>PLQ@
Punto di intersezione della curva caratteristica limite di tensione con l'asse x: lettura
o calcolo della velocità
8 0RW
Q>PLQ@
P2
1
N(
Traslazione dall'uscita della curva caratteristica limite di tensione sull'asse x da n1 a
n2.
Q>JLULPLQ@
Q ವ
8 0RWQXRYR
8 0RW
P3
Lettura di Mlimite sulla curva caratteristica limite di tensione per Umot.
P4
Calcolo di Mlimite, nuova:
0/LPLWHQXRYR
80RWQXRYR 8L1
80RW 8L1
ವ 0/LPLWH
Con i punti P2 e P4 si ricava la curva caratteristica limite traslata di tensione.
Traslazione della curva caratteristica del limite di tensione da Umot a Umot nuova
Esempio di traslazione della curva caratteristica del limite di tensione senza deflussaggio del campo
Motore 1FW3201-1❑L; nN = 500 1/min; kE = 519 V/1000 min-1
Umot nuova = 290 V; calcolo con Umot = 425 V
UiN = kE ∙ nN/1000; UiN = 519 ∙ 500/1000 = 259,5 V
La condizione Umot nuova > UiN è soddisfatta.
&DOFROR3
Q ವ PLQ
&DOFROR3
Q
ವ PLQ
&DOFROR3
&DOFRODUH0OLPSHU9HQ PLQ 1P
&DOFROR3
0OLPQXRYR
ವ 1P
Inserire i punti P2 e P4 e collegarli. Questa linea è la nuova curva caratteristica limite di
tensione per Umot nuova = 290 V.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
63
Dati tecnici e curve caratteristiche
Valori di tolleranza
I dati caratteristici riportati nei fogli dati sono valori nominali soggetti a una dispersione
naturale.
Tabella 4- 3
Valori di tolleranza dei dati motore
Dati motore
Valore tipico
Valore garantito
± 7,5 %
Corrente da fermo
I0
±3%
Costante di tempo elettrica
Tel
±5%
± 10 %
Costante di coppia
kT
±3%
± 7,5 %
Costante di tensione
kE
±3%
± 7,5 %
Resistenza dell'avvolgimento
Rfase
±5%
± 10 %
Momento d'inerzia della massa
Jmot
±2%
± 10 %
Effetti della temperatura e della dispersione dei parametri sulla curva caratteristica
Le curve caratteristiche coppia-numero di giri descritte nel capitolo seguente si riferiscono ai
valori nominali in condizioni di temperatura di esercizio.
ATTENZIONE
La temperatura del motore provoca una chiara traslazione della curva caratteristica del
limite di tensione nel campo di velocità superiore. Di questo va tenuto conto durante la
progettazione (in particolare nelle applicazioni in cui il motore a freddo deve fornire le
velocità più elevate) con sistemi convertitore senza deflussaggio del campo.
Limite di velocità nmax Inv
Il campo di velocità viene limitato dalla velocità limite meccanica nmax mecc (forze centrifughe
sul rotore, durata del cuscinetto) oppure dalla velocità limite elettrica nmax Inv.
CAUTELA
Il funzionamento del motore (come motore o azionato dall'esterno) con velocità superiori a
nmax Inv può indurre nell'avvolgimento una tensione superiore a quella consentita dal
convertitore. Questo potrebbe danneggiare irrimediabilmente il convertitore. Non è
consentito il funzionamento al di sopra della velocità nmax Inv senza che siano state
intraprese misure supplementari o di protezione. Siemens AG non si assume alcuna
responsabilità per eventuali danni verificatisi a causa della mancata osservanza della
suddetta indicazione di pericolo.
Tipo di convertitore
Tensione massima consentita sul convertitore Ucons Inv
SINAMICS S120, 3AC 380-480 V
820 V
Con la seguente formula è possibile calcolare la velocità massima nmax Inv alla quale è
consentito il funzionamento senza alcuna limitazione.
64
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Q
,QYPD[ >PLQ@ 8,QYDPP >9@ವ
PLQ ವ N
( >9@
kE = costante di tensione (vedere il capitolo "Curve caratteristiche coppia-numero di giri")
SINAMICS S120 calcola questo valore automaticamente.
Nel caso di funzionamento corretto del convertitore, la tensione che si presenta sui morsetti
del motore è limitata dal funzionamento con deflussaggio del campo, in quanto in relazione
alla tensione indotta viene generata una tensione in opposizione di fase.
4.1
Curve caratteristiche coppia-numero di giri
Tutte le tensioni e le correnti riportate nei fogli dati sono valori effettivi. Ulteriori numeri di giri
nominali su richiesta.
I dati nominali indicati si riferiscono a Urete eff = 400 V, Active Line Module, curva caratteristica
[b].
Nota
Esercizio senza raffreddamento ad acqua
I motori Torque completi 1FW3 possono essere utilizzati senza raffreddamento ad acqua se
la coppia viene ridotta di conseguenza e viene garantita una dispersione del calore senza
impedimenti. Il fattore di riduzione dipende da altezza d'asse, lunghezza costruttiva e
numero di giri e può essere fornito su richiesta.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
65
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
4.1.1
Altezza d'asse 150
Tabella 4- 4
1FW3150, numero di giri nominale 300 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3150-1☐H
N. di giri nominale
nN
1/min
300
Numero di poli
2p
--
14
Coppia nominale
MN (100 K)
Nm
100
Potenza nominale
PN (100 K)
kW
3,1
Corrente nominale
IN (100 K)
A
8,0
Coppia da fermo
M0 (100 K)
Nm
105
Corrente da fermo
I0 (100 K)
A
7,3
Momento d'inerzia
Jmot
kgm2
0,12
Trasmissione misura numero di giri
(in caso di montaggio encoder tramite
cinghia)
ienc
--
-3,5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1700
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
660
Coppia massima
Mmax
Nm
200
Corrente massima
Imax
A
17
kT
Nm/A
14,4
Dati limite
Costanti fisiche
Costante di coppia
Costante di tensione (concatenata)
kE
V/1000 1/min
917
Resistenza avvolgimento a 20 °C
Rfase
Ω
3,94
Induttanza del campo rotante
LD
mH
109
Costante di tempo elettrica
Tel
ms
20
Costante di tempo meccanica
Tmecc
ms
9,6
Costante di tempo termica
Tth
min
4
Resistenza torsionale dell'albero
ct
Nm/rad
31300000
Peso
m
kg
87
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
66
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
E
F
0>1P@
D
6
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-3
1FW3150-1⃞H
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
67
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 5
1FW3150, numero di giri nominale 500 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3150-1☐L
N. di giri nominale
nN
1/min
500
Numero di poli
2p
14
Coppia nominale
MN (100 K)
Nm
100
Potenza nominale
PN (100 K)
kW
5,2
Corrente nominale
IN (100 K)
A
12,0
Coppia da fermo
M0 (100 K)
Nm
105
Corrente da fermo
I0 (100 K)
A
11,5
Momento d'inerzia
Jmot
kgm2
0,12
Trasmissione misura numero di giri
(in caso di montaggio encoder tramite
cinghia)
ienc
--
-3,5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1700
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
1020
Coppia massima
Mmax
Nm
200
Corrente massima
Imax
A
26
Costante di coppia
kT
Nm/A
9,4
Costante di tensione (concatenata)
kE
V/1000 1/min
598
Resistenza avvolgimento a 20 °C
Rfase
Ω
1,68
Dati limite
Costanti fisiche
Induttanza del campo rotante
LD
mH
47
Costante di tempo elettrica
Tel
ms
20
Costante di tempo meccanica
Tmecc
ms
9,6
Costante di tempo termica
Tth
min
4
Resistenza torsionale dell'albero
ct
Nm/rad
3,13E+07
Peso
m
kg
87
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
68
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
0>1P@
D
E
F
6
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-4
1FW3150-1⃞L
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
69
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 6
1FW3150, numero di giri nominale 750 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3150-1☐P
N. di giri nominale
nN
1/min
750
Numero di poli
2p
14
Coppia nominale
MN (100 K)
Nm
100
Potenza nominale
PN (100 K)
kW
7,9
Corrente nominale
IN (100 K)
A
18,0
Coppia da fermo
M0 (100 K)
Nm
105
Corrente da fermo
I0 (100 K)
A
17,5
Momento d'inerzia
Jmot
kgm2
0,12
Trasmissione misura numero di giri
(in caso di montaggio encoder tramite
cinghia)
ienc
--
-3,5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1700
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
1570
Coppia massima
Mmax
Nm
200
Corrente massima
Imax
A
41
Costante di coppia
kT
Nm/A
6,1
Costante di tensione (concatenata)
kE
V/1000 1/min
393
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,75
Dati limite
Costanti fisiche
Induttanza del campo rotante
LD
mH
21
Costante di tempo elettrica
Tel
ms
20
Costante di tempo meccanica
Tmecc
ms
10,2
Costante di tempo termica
Tth
min
4
Resistenza torsionale dell'albero
ct
Nm/rad
31300000
Peso
m
kg
87
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
70
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
E
F
0>1P@
D
6
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-5
1FW3150-1⃞P
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
71
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 7
1FW3152, numero di giri nominale 300 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3152-1☐H
N. di giri nominale
nN
1/min
300
Numero di poli
2p
14
Coppia nominale
MN (100 K)
Nm
200
Potenza nominale
PN (100 K)
kW
6,3
Corrente nominale
IN (100 K)
A
14
Coppia da fermo
M0 (100 K)
Nm
210
Corrente da fermo
I0 (100 K)
A
15
Momento d'inerzia
Jmot
kgm2
0,16
Trasmissione misura numero di giri
(in caso di montaggio encoder tramite
cinghia)
ienc
--
-3,5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1700
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
660
Coppia massima
Mmax
Nm
400
Corrente massima
Imax
A
35
Costante di coppia
kT
Nm/A
14,4
Costante di tensione (concatenata)
kE
V/1000 1/min
917
Resistenza avvolgimento a 20 °C
Rfase
Ω
1,47
Dati limite
Costanti fisiche
Induttanza del campo rotante
LD
mH
49
Costante di tempo elettrica
Tel
ms
24
Costante di tempo meccanica
Tmecc
ms
4,8
Costante di tempo termica
Tth
min
4
Resistenza torsionale dell'albero
ct
Nm/rad
21700000
Peso
m
kg
108
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
72
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
0>1P@
D
E
F
6
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-6
1FW3152-1☐H
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
73
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 8
1FW3152, numero di giri nominale 500 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3152-1☐L
N. di giri nominale
nN
1/min
500
Numero di poli
2p
14
Coppia nominale
MN (100 K)
Nm
200
Potenza nominale
PN (100 K)
kW
10,5
Corrente nominale
IN (100 K)
A
22
Coppia da fermo
M0 (100 K)
Nm
210
Corrente da fermo
I0 (100 K)
A
22,5
Momento d'inerzia
Jmot
kgm2
0,16
Trasmissione misura numero di giri
(in caso di montaggio encoder tramite
cinghia)
ienc
--
-3,5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1700
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
1020
Coppia massima
Mmax
Nm
400
Corrente massima
Imax
A
53
Costante di coppia
kT
Nm/A
9,4
Costante di tensione (concatenata)
kE
V/1000 1/min
598
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,62
Dati limite
Costanti fisiche
Induttanza del campo rotante
LD
mH
21
Costante di tempo elettrica
Tel
ms
24
Costante di tempo meccanica
Tmecc
ms
4,7
Costante di tempo termica
Tth
min
4
Resistenza torsionale dell'albero
ct
Nm/rad
21700000
Peso
m
kg
108
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
74
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
E
F
0>1P@
D
6
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-7
1FW3152-1☐L
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
75
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 9
1FW3152, numero di giri nominale 750 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3152-1☐P
N. di giri nominale
nN
1/min
750
Numero di poli
2p
14
Coppia nominale
MN (100 K)
Nm
200
Potenza nominale
PN (100 K)
kW
15,7
Corrente nominale
IN (100 K)
A
32,5
Coppia da fermo
M0 (100 K)
Nm
210
Corrente da fermo
I0 (100 K)
A
33,5
Momento d'inerzia
Jmot
kgm2
0,16
Trasmissione misura numero di giri
(in caso di montaggio encoder tramite
cinghia)
ienc
--
-3,5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1700
Numero di giri max. ammesso
nmax 830 V
1/min
1520
Coppia massima
Mmax
Nm
400
Corrente massima
Imax
A
79
kT
Nm/A
6,3
Dati limite
Costanti fisiche
Costante di coppia
Costante di tensione (concatenata)
kE
V/1000 1/min
399
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,28
Induttanza del campo rotante
LD
mH
9,3
Costante di tempo elettrica
Tel
ms
24
Costante di tempo meccanica
Tmecc
ms
4,7
Costante di tempo termica
Tth
min
4
Resistenza torsionale dell'albero
ct
Nm/rad
21700000
Peso
m
kg
108
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
76
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
E
F
0>1P@
D
6
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-8
1FW3152-1☐P
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
77
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 10 1FW3154, numero di giri nominale 300 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3154-1☐H
N. di giri nominale
nN
1/min
300
Numero di poli
2p
14
Coppia nominale
MN (100 K)
Nm
300
Potenza nominale
PN (100 K)
kW
9,4
Corrente nominale
IN (100 K)
A
20,5
Coppia da fermo
M0 (100 K)
Nm
315
Corrente da fermo
I0 (100 K)
A
21,5
Momento d'inerzia
Jmot
kgm2
0,20
Trasmissione misura numero di giri
(in caso di montaggio encoder tramite
cinghia)
ienc
--
-3,5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1700
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
640
Coppia massima
Mmax
Nm
600
Corrente massima
Imax
A
49
Costante di coppia
kT
Nm/A
14,8
Costante di tensione (concatenata)
kE
V/1000 1/min
945
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,92
Dati limite
Costanti fisiche
Induttanza del campo rotante
LD
mH
33
Costante di tempo elettrica
Tel
ms
26
Costante di tempo meccanica
Tmecc
ms
3,5
Costante di tempo termica
Tth
min
4
Resistenza torsionale dell'albero
ct
Nm/rad
16600000
Peso
m
kg
129
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
78
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
D
E
F
0>1P@
6
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-9
1FW3154-1☐H
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
79
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 11 1FW3154, numero di giri nominale 500 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3154-1☐L
N. di giri nominale
nN
1/min
500
Numero di poli
2p
14
Coppia nominale
MN (100 K)
Nm
300
Potenza nominale
PN (100 K)
kW
15,7
Corrente nominale
IN (100 K)
A
32
Coppia da fermo
M0 (100 K)
Nm
315
Corrente da fermo
I0 (100 K)
A
33
Momento d'inerzia
Jmot
kgm2
0,20
Trasmissione misura numero di giri
(in caso di montaggio encoder tramite
cinghia)
ienc
--
-3,5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1700
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
990
Coppia massima
Mmax
Nm
600
Corrente massima
Imax
A
75
Costante di coppia
kT
Nm/A
9,6
Costante di tensione (concatenata)
kE
V/1000 1/min
610
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,39
Dati limite
Costanti fisiche
Induttanza del campo rotante
LD
mH
14
Costante di tempo elettrica
Tel
ms
26
Costante di tempo meccanica
Tmecc
ms
3,5
Costante di tempo termica
Tth
min
4
Resistenza torsionale dell'albero
ct
Nm/rad
16600000
Peso
m
kg
129
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
80
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
D
E
F
0>1P@
6
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-10
1FW3154-1☐L
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
81
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 12 1FW3154, numero di giri nominale 750 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3154-1☐P
N. di giri nominale
nN
1/min
750
Numero di poli
2p
14
Coppia nominale
MN (100 K)
Nm
300
Potenza nominale
PN (100 K)
kW
23,6
Corrente nominale
IN (100 K)
A
47,5
Coppia da fermo
M0 (100 K)
Nm
315
Corrente da fermo
I0 (100 K)
A
49
Momento d'inerzia
Jmot
kgm2
0,20
Trasmissione misura numero di giri
(in caso di montaggio encoder tramite
cinghia)
ienc
--
-3,5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1700
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
1490
Coppia massima
Mmax
Nm
600
Corrente massima
Imax
A
113
Costante di coppia
kT
Nm/A
6,4
Costante di tensione (concatenata)
kE
V/1000 1/min
407
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,17
Dati limite
Costanti fisiche
Induttanza del campo rotante
LD
mH
6,1
Costante di tempo elettrica
Tel
ms
25
Costante di tempo meccanica
Tmecc
ms
3,5
Costante di tempo termica
Tth
min
4
Resistenza torsionale dell'albero
ct
Nm/rad
16600000
Peso
m
kg
129
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
82
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
D
E
F
0>1P@
6
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-11
1FW3154-1☐P
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
83
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 13 1FW3155, numero di giri nominale 300 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3155-1☐H
N. di giri nominale
nN
1/min
300
Numero di poli
2p
14
Coppia nominale
MN (100 K)
Nm
400
Potenza nominale
PN (100 K)
kW
12,6
Corrente nominale
IN (100 K)
A
28
Coppia da fermo
M0 (100 K)
Nm
420
Corrente da fermo
I0 (100 K)
A
29
Momento d'inerzia
Jmot
kgm2
0,24
Trasmissione misura numero di giri
Ienc
--
-3,5
(in caso di montaggio encoder tramite
cinghia)
Dati limite
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1700
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
660
Coppia massima
Mmax
Nm
800
Corrente massima
Imax
A
67
Costante di coppia
kT
Nm/A
14,4
Costante di tensione (concatenata)
kE
V/1000 1/min
917
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,61
Induttanza del campo rotante
LD
mH
24
Costante di tempo elettrica
Tel
ms
28
Costante di tempo meccanica
Tmecc
ms
3,0
Costante di tempo termica
Tth
min
4
Resistenza torsionale dell'albero
ct
Nm/rad
14000000
Peso
m
kg
150
Costanti fisiche
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
84
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
D
E
F
0>1P@
6
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-12
1FW3155-1☐H
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
85
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 14 1FW3155, numero di giri nominale 500 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3155-1☐L
N. di giri nominale
nN
1/min
500
Numero di poli
2p
14
Coppia nominale
MN (100 K)
Nm
400
Potenza nominale
PN (100 K)
kW
20,9
Corrente nominale
IN (100 K)
A
43
Coppia da fermo
M0 (100 K)
Nm
420
Corrente da fermo
I0 (100 K)
A
45
Momento d'inerzia
Jmot
kgm2
0,24
Trasmissione misura numero di giri
Ienc
--
-3,5
(in caso di montaggio encoder tramite
cinghia)
Dati limite
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1700
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
1020
Coppia massima
Mmax
Nm
800
Corrente massima
Imax
A
103
Costante di coppia
kT
Nm/A
9,4
Costante di tensione (concatenata)
kE
V/1000 1/min
598
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,26
Induttanza del campo rotante
LD
mH
10
Costante di tempo elettrica
Tel
ms
27
Costante di tempo meccanica
Tmecc
ms
3,0
Costante di tempo termica
Tth
min
4
Resistenza torsionale dell'albero
ct
Nm/rad
14000000
Peso
m
kg
150
Costanti fisiche
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
86
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
D
E
F
0>1P@
6
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-13
1FW3155-1☐L
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
87
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 15 1FW3155, numero di giri nominale 750 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3155-1☐P
N. di giri nominale
nN
1/min
750
Numero di poli
2p
14
Coppia nominale
MN (100 K)
Nm
400
Potenza nominale
PN (100 K)
kW
31,4
Corrente nominale
IN (100 K)
A
64
Coppia da fermo
M0 (100 K)
Nm
420
Corrente da fermo
I0 (100 K)
A
67
Momento d'inerzia
Jmot
kgm2
0,24
Trasmissione misura numero di giri
Ienc
--
-3,5
(in caso di montaggio encoder tramite
cinghia)
Dati limite
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1700
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
1520
Coppia massima
Mmax
Nm
800
Corrente massima
Imax
A
153
Costante di coppia
kT
Nm/A
6,3
Costante di tensione (concatenata)
kE
V/1000 1/min
399
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,11
Induttanza del campo rotante
LD
mH
4,4
Costante di tempo elettrica
Tel
ms
28
Costante di tempo meccanica
Tmecc
ms
2,8
Costante di tempo termica
Tth
min
4
Resistenza torsionale dell'albero
ct
Nm/rad
14000000
Peso
m
kg
150
Costanti fisiche
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
88
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
D
E
F
0>1P@
6
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-14
1FW3155-1☐P
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
89
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 16 1FW3156, numero di giri nominale 300 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3156-1☐H
N. di giri nominale
nN
1/min
300
Numero di poli
2p
14
Coppia nominale
MN (100 K)
Nm
500
Potenza nominale
PN (100 K)
kW
15,7
Corrente nominale
IN (100 K)
A
34
Coppia da fermo
M0 (100 K)
Nm
525
Corrente da fermo
I0 (100 K)
A
35
Momento d'inerzia
Jmot
kgm2
0,28
Trasmissione misura numero di giri
ienc
--
-3,5
(in caso di montaggio encoder tramite
cinghia)
Dati limite
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1700
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
640
Coppia massima
Mmax
Nm
1000
Corrente massima
Imax
A
81
Costante di coppia
kT
Nm/A
14,9
Costante di tensione (concatenata)
kE
V/1000 1/min
947
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,5
Induttanza del campo rotante
LD
mH
20
Costante di tempo elettrica
Tel
ms
28
Costante di tempo meccanica
Tmecc
ms
2,7
Costante di tempo termica
Tth
min
5
Resistenza torsionale dell'albero
ct
Nm/rad
11300000
Peso
m
kg
171
Costanti fisiche
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
90
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
D
E
F
0>1P@
6
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-15
1FW3156-1☐H
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
91
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 17 1FW3156, numero di giri nominale 500 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3156-1☐L
N. di giri nominale
nN
1/min
500
Numero di poli
2p
14
Coppia nominale
MN (100 K)
Nm
500
Potenza nominale
PN (100 K)
kW
26,2
Corrente nominale
IN (100 K)
A
53
Coppia da fermo
M0 (100 K)
Nm
525
Corrente da fermo
I0 (100 K)
A
55
Momento d'inerzia
Jmot
kgm2
0,28
Trasmissione misura numero di giri
ienc
--
-3,5
(in caso di montaggio encoder tramite
cinghia)
Dati limite
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1700
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
990
Coppia massima
Mmax
Nm
1000
Corrente massima
Imax
A
126
Costante di coppia
kT
Nm/A
9,6
Costante di tensione (concatenata)
kE
V/1000 1/min
608
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,21
Induttanza del campo rotante
LD
mH
8,5
Costante di tempo elettrica
Tel
ms
29
Costante di tempo meccanica
Tmecc
ms
2,7
Costante di tempo termica
Tth
min
5
Resistenza torsionale dell'albero
ct
Nm/rad
11300000
Peso
m
kg
171
Costanti fisiche
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
92
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
D
E
F
0>1P@
6
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-16
1FW3156-1☐L
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
93
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 18 1FW3156, numero di giri nominale 750 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3156-1☐P
N. di giri nominale
nN
1/min
750
Numero di poli
2p
14
Coppia nominale
MN (100 K)
Nm
500
Potenza nominale
PN (100 K)
kW
39,3
Corrente nominale
IN (100 K)
A
76
Coppia da fermo
M0 (100 K)
Nm
525
Corrente da fermo
I0 (100 K)
A
80
Momento d'inerzia
Jmot
kgm2
0,28
Trasmissione misura numero di giri
ienc
--
-3,5
(in caso di montaggio encoder tramite
cinghia)
Dati limite
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1700
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
1450
Coppia massima
Mmax
Nm
1000
Corrente massima
Imax
A
183
Costante di coppia
kT
Nm/A
6,6
Costante di tensione (concatenata)
kE
V/1000 1/min
419
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,1
Induttanza del campo rotante
LD
mH
3,9
Costante di tempo elettrica
Tel
ms
28
Costante di tempo meccanica
Tmecc
ms
2,6
Costante di tempo termica
Tth
min
5
Resistenza torsionale dell'albero
ct
Nm/rad
11300000
Peso
m
kg
171
Costanti fisiche
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
94
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
D
E
F
0>1P@
6
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-17
1FW3156-1☐P
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
95
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
4.1.2
Altezza d'asse 200
Tabella 4- 19 1FW3201, numero di giri nominale 150 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3201-1☐E
N. di giri nominale
nN
1/min
Numero di poli
2p
Coppia nominale
MN (100 K)
Nm
Potenza nominale
PN (100 K)
kW
4,7
Corrente nominale
IN (100 K)
A
13
150
28
300
Coppia da fermo
M0 (100 K)
Nm
315
Corrente da fermo
I0 (100 K)
A
13
Momento d'inerzia
Jmot
kgm2
0,22
Trasmissione misura numero di giri
ienc
--
-3,5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
380
Coppia massima
Mmax
Nm
555
Corrente massima
Imax
A
28
kT
Nm/A
23,9
Costante di tensione (concatenata)
kE
V/1000 1/min
1521
Resistenza avvolgimento a 20 °C
Rfase
Ω
1,8
(in caso di montaggio encoder tramite
cinghia)
Dati limite
Costanti fisiche
Costante di coppia
Induttanza del campo rotante
LD
mH
58
Costante di tempo elettrica
Tel
ms
23
Costante di tempo meccanica
Tmecc
ms
2,9
Costante di tempo termica
Tth
min
10
Resistenza torsionale dell'albero
ct
Nm/rad
37300000
Peso
m
kg
127
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
96
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
D
E
F
0>1P@
6.
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-18
1FW3201-1☐E
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
97
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 20 1FW3201, numero di giri nominale 300 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3201-1☐H
N. di giri nominale
nN
1/min
300
Numero di poli
2p
28
Coppia nominale
MN (100 K)
Nm
300
Potenza nominale
PN (100 K)
kW
9,4
Corrente nominale
IN (100 K)
A
23
Coppia da fermo
M0 (100 K)
Nm
315
Corrente da fermo
I0 (100 K)
A
24
Momento d'inerzia
Jmot
kgm2
0,22
Trasmissione misura numero di giri
ienc
--
-3,5
(in caso di montaggio encoder tramite
cinghia)
Dati limite
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
680
Coppia massima
Mmax
Nm
555
Corrente massima
Imax
A
50
Costante di coppia
kT
Nm/A
13,3
Costante di tensione (concatenata)
kE
V/1000 1/min
844
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,56
Induttanza del campo rotante
LD
mH
13
Costante di tempo elettrica
Tel
ms
17
Costanti fisiche
Costante di tempo meccanica
Tmecc
ms
2,9
Costante di tempo termica
Tth
min
10
Resistenza torsionale dell'albero
ct
Nm/rad
37300000
Peso
m
kg
127
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
98
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
D
E
F
0>1P@
6.
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-19
1FW3201-1☐H
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
99
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 21 1FW3201, numero di giri nominale 500 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3201-1☐L
N. di giri nominale
nN
1/min
500
Numero di poli
2p
28
Coppia nominale
MN (100 K)
Nm
300
Potenza nominale
PN (100 K)
kW
15,7
Corrente nominale
IN (100 K)
A
37
Coppia da fermo
M0 (100 K)
Nm
315
Corrente da fermo
I0 (100 K)
A
38
Momento d'inerzia
Jmot
kgm2
0,22
Trasmissione misura numero di giri
ienc
--
-3,5
(in caso di montaggio encoder tramite
cinghia)
Dati limite
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
1110
Coppia massima
Mmax
Nm
555
Corrente massima
Imax
A
82
Costante di coppia
kT
Nm/A
8,2
Costante di tensione (concatenata)
kE
V/1000 1/min
519
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,21
Induttanza del campo rotante
LD
mH
6,8
Costante di tempo elettrica
Tel
ms
23
Costanti fisiche
Costante di tempo meccanica
Tmecc
ms
2,9
Costante di tempo termica
Tth
min
10
Resistenza torsionale dell'albero
ct
Nm/rad
37300000
Peso
m
kg
127
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
100
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
D
E
F
0>1P@
6.
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-20
1FW3201-1☐L
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
101
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 22 1FW3202, numero di giri nominale 150 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3202-1☐E
N. di giri nominale
nN
1/min
150
Numero di poli
2p
28
Coppia nominale
MN (100 K)
Nm
500
Potenza nominale
PN (100 K)
kW
7,9
Corrente nominale
IN (100 K)
A
21
Coppia da fermo
M0 (100 K)
Nm
525
Corrente da fermo
I0 (100 K)
A
22
Momento d'inerzia
Jmot
kgm2
0,36
Trasmissione misura numero di giri
ienc
--
-3,5
(in caso di montaggio encoder tramite
cinghia)
Dati limite
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
380
Coppia massima
Mmax
Nm
925
Corrente massima
Imax
A
47
Costante di coppia
kT
Nm/A
23,9
Costante di tensione (concatenata)
kE
V/1000 1/min
1521
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,94
Induttanza del campo rotante
LD
mH
35
Costante di tempo elettrica
Tel
ms
27
Costanti fisiche
Costante di tempo meccanica
Tmecc
ms
2,4
Costante di tempo termica
Tth
min
10
Resistenza torsionale dell'albero
ct
Nm/rad
27400000
Peso
m
kg
156
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
102
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
D
E
F
0>1P@
6.
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-21
1FW3202-1☐E
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
103
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 23 1FW3202, numero di giri nominale 300 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3202-1☐H
N. di giri nominale
nN
1/min
300
Numero di poli
2p
28
Coppia nominale
MN (100 K)
Nm
500
Potenza nominale
PN (100 K)
kW
15,7
Corrente nominale
IN (100 K)
A
37
Coppia da fermo
M0 (100 K)
Nm
525
Corrente da fermo
I0 (100 K)
A
39
Momento d'inerzia
Jmot
kgm2
0,36
Trasmissione misura numero di giri
ienc
--
-3,5
(in caso di montaggio encoder tramite
cinghia)
Dati limite
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
670
Coppia massima
Mmax
Nm
925
Corrente massima
Imax
A
81
Costante di coppia
kT
Nm/A
13,5
Costante di tensione (concatenata)
kE
V/1000 1/min
857
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,29
Induttanza del campo rotante
LD
mH
7,9
Costante di tempo elettrica
Tel
ms
19
Costanti fisiche
Costante di tempo meccanica
Tmecc
ms
2,4
Costante di tempo termica
Tth
min
10
Resistenza torsionale dell'albero
ct
Nm/rad
27400000
Peso
m
kg
156
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
104
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
D
E
F
0>1P@
6.
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-22
1FW3202-1☐H
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
105
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 24 1FW3202, numero di giri nominale 500 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3202-1☐L
N. di giri nominale
nN
1/min
500
Numero di poli
2p
28
Coppia nominale
MN (100 K)
Nm
500
Potenza nominale
PN (100 K)
kW
26,2
Corrente nominale
IN (100 K)
A
59
Coppia da fermo
M0 (100 K)
Nm
525
Corrente da fermo
I0 (100 K)
A
62
Momento d'inerzia
Jmot
kgm2
0,36
Trasmissione misura numero di giri
ienc
--
-3,5
(in caso di montaggio encoder tramite
cinghia)
Dati limite
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
1070
Coppia massima
Mmax
Nm
925
Corrente massima
Imax
A
131
Costante di coppia
kT
Nm/A
8,5
Costante di tensione (concatenata)
kE
V/1000 1/min
538
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,12
Induttanza del campo rotante
LD
mH
4,2
Costante di tempo elettrica
Tel
ms
25
Costanti fisiche
Costante di tempo meccanica
Tmecc
ms
2,5
Costante di tempo termica
Tth
min
10
Resistenza torsionale dell'albero
ct
Nm/rad
27400000
Peso
m
kg
156
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
106
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
D
E
F
0>1P@
6.
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-23
1FW3202-1☐L
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
107
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 25 1FW3203, numero di giri nominale 150 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3203-1☐E
N. di giri nominale
nN
1/min
150
Numero di poli
2p
28
Coppia nominale
MN (100 K)
Nm
750
Potenza nominale
PN (100 K)
kW
11,8
Corrente nominale
IN (100 K)
A
30
Coppia da fermo
M0 (100 K)
Nm
790
Corrente da fermo
I0 (100 K)
A
32
Momento d'inerzia
Jmot
kgm2
0,49
Trasmissione misura numero di giri
ienc
--
-3,5
(in caso di montaggio encoder tramite
cinghia)
Dati limite
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
370
Coppia massima
Mmax
Nm
1390
Corrente massima
Imax
A
69
Costante di coppia
kT
Nm/A
24,4
Costante di tensione (concatenata)
kE
V/1000 1/min
1554
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,65
Induttanza del campo rotante
LD
mH
26
Costante di tempo elettrica
Tel
ms
29
Costanti fisiche
Costante di tempo meccanica
Tmecc
ms
2,2
Costante di tempo termica
Tth
min
12
Resistenza torsionale dell'albero
ct
Nm/rad
21600000
Peso
m
kg
182
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
108
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
D
E
F
0>1P@
6.
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-24
1FW3203-1☐E
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
109
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 26 1FW3203, numero di giri nominale 300 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3203-1☐H
N. di giri nominale
nN
1/min
300
Numero di poli
2p
28
Coppia nominale
MN (100 K)
Nm
750
Potenza nominale
PN (100 K)
kW
23,6
Corrente nominale
IN (100 K)
A
59
Coppia da fermo
M0 (100 K)
Nm
790
Corrente da fermo
I0 (100 K)
A
62
Momento d'inerzia
Jmot
kgm2
0,49
Trasmissione misura numero di giri
ienc
--
-3,5
(in caso di montaggio encoder tramite
cinghia)
Dati limite
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
710
Coppia massima
Mmax
Nm
1390
Corrente massima
Imax
A
132
Costante di coppia
kT
Nm/A
12,7
Costante di tensione (concatenata)
kE
V/1000 1/min
810
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,16
Induttanza del campo rotante
LD
mH
5
Costante di tempo elettrica
Tel
ms
22
Costanti fisiche
Costante di tempo meccanica
Tmecc
ms
2
Costante di tempo termica
Tth
min
12
Resistenza torsionale dell'albero
ct
Nm/rad
21600000
Peso
m
kg
182
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
110
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
D
E
F
0>1P@
6.
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-25
1FW3203-1☐H
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
111
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 27 1FW3203, numero di giri nominale 500 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3203-1☐L
N. di giri nominale
nN
1/min
500
Numero di poli
2p
28
Coppia nominale
MN (100 K)
Nm
750
Potenza nominale
PN (100 K)
kW
39,3
Corrente nominale
IN (100 K)
A
92
Coppia da fermo
M0 (100 K)
Nm
790
Corrente da fermo
I0 (100 K)
A
100
Momento d'inerzia
Jmot
kgm2
0,49
Trasmissione misura numero di giri
ienc
--
-3,5
(in caso di montaggio encoder tramite
cinghia)
Dati limite
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
1110
Coppia massima
Mmax
Nm
1390
Corrente massima
Imax
A
204
Costante di coppia
kT
Nm/A
8,2
Costante di tensione (concatenata)
kE
V/1000 1/min
520
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,07
Induttanza del campo rotante
LD
mH
2,8
Costante di tempo elettrica
Tel
ms
28
Costanti fisiche
Costante di tempo meccanica
Tmecc
ms
2,2
Costante di tempo termica
Tth
min
12
Resistenza torsionale dell'albero
ct
Nm/rad
21600000
Peso
m
kg
182
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
112
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
D
E
F
0>1P@
6.
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-26
1FW3203-1☐L
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
113
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 28 1FW3204, numero di giri nominale 150 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3204-1☐E
N. di giri nominale
nN
1/min
150
Numero di poli
2p
28
Coppia nominale
MN (100 K)
Nm
1000
Potenza nominale
PN (100 K)
kW
15,7
Corrente nominale
IN (100 K)
A
40
Coppia da fermo
M0 (100 K)
Nm
1050
Corrente da fermo
I0 (100 K)
A
42
Momento d'inerzia
Jmot
kgm2
0,7
Trasmissione misura numero di giri (in
caso di montaggio encoder tramite
cinghia)
ienc
--
-3,5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
360
Coppia massima
Mmax
Nm
1850
Corrente massima
Imax
A
90
Costante di coppia
kT
Nm/A
24,9
Costante di tensione (concatenata)
kE
V/1000 1/min
1584
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,46
Dati limite
Costanti fisiche
Induttanza del campo rotante
LD
mH
19
Costante di tempo elettrica
Tel
ms
30
Costante di tempo meccanica
Tmecc
ms
2,2
Costante di tempo termica
Tth
min
14
Resistenza torsionale dell'albero
ct
Nm/rad
16400000
Peso
m
kg
223
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
114
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
D
E
F
0>1P@
6.
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-27
1FW3204-1☐E
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
115
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 29 1FW3204, numero di giri nominale 300 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3204-1☐H
N. di giri nominale
nN
1/min
300
Numero di poli
2p
28
Coppia nominale
MN (100 K)
Nm
1000
Potenza nominale
PN (100 K)
kW
31,4
Corrente nominale
IN (100 K)
A
74
Coppia da fermo
M0 (100 K)
Nm
1050
Corrente da fermo
I0 (100 K)
A
77
Momento d'inerzia
Jmot
kgm2
0,7
Trasmissione misura numero di giri (in
caso di montaggio encoder tramite
cinghia)
ienc
--
-3,5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
670
Coppia massima
Mmax
Nm
1850
Corrente massima
Imax
A
163
Costante di coppia
kT
Nm/A
13,5
Costante di tensione (concatenata)
kE
V/1000 1/min
857
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,13
Dati limite
Costanti fisiche
Induttanza del campo rotante
LD
mH
4
Costante di tempo elettrica
Tel
ms
24
Costante di tempo meccanica
Tmecc
ms
1,9
Costante di tempo termica
Tth
min
14
Resistenza torsionale dell'albero
ct
Nm/rad
16400000
Peso
m
kg
223
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
116
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
D
E
F
0>1P@
6.
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-28
1FW3204-1☐H
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
117
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 30 1FW3204, numero di giri nominale 500 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3204-1☐L
N. di giri nominale
nN
1/min
500
Numero di poli
2p
28
Coppia nominale
MN (100 K)
Nm
1000
Potenza nominale
PN (100 K)
kW
52,3
Corrente nominale
IN (100 K)
A
118
Coppia da fermo
M0 (100 K)
Nm
1050
Corrente da fermo
I0 (100 K)
A
129
Momento d'inerzia
Jmot
kgm2
0,7
Trasmissione misura numero di giri (in
caso di montaggio encoder tramite
cinghia)
ienc
--
-3,5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
1060
Coppia massima
Mmax
Nm
1850
Corrente massima
Imax
A
260
Costante di coppia
kT
Nm/A
8,5
Costante di tensione (concatenata)
kE
V/1000 1/min
543
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,05
Dati limite
Costanti fisiche
Induttanza del campo rotante
LD
mH
1,6
Costante di tempo elettrica
Tel
ms
22
Costante di tempo meccanica
Tmecc
ms
2,1
Costante di tempo termica
Tth
min
14
Resistenza torsionale dell'albero
ct
Nm/rad
16400000
Peso
m
kg
223
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
118
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
D
E
F
0>1P@
6.
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-29
1FW3204-1☐L
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
119
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 31 1FW3206, numero di giri nominale 150 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3206-1☐E
N. di giri nominale
nN
1/min
150
Numero di poli
2p
28
Coppia nominale
MN (100 K)
Nm
1500
Potenza nominale
PN (100 K)
kW
23,6
Corrente nominale
IN (100 K)
A
65
Coppia da fermo
M0 (100 K)
Nm
1575
Corrente da fermo
I0 (100 K)
A
68
Momento d'inerzia
Jmot
kgm2
0,97
Trasmissione misura numero di giri
ienc
--
-3,5
(in caso di montaggio encoder tramite
cinghia)
Dati limite
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
390
Coppia massima
Mmax
Nm
2775
Corrente massima
Imax
A
145
Costante di coppia
kT
Nm/A
23
Costante di tensione (concatenata)
kE
V/1000 1/min
1464
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,27
Induttanza del campo rotante
LD
mH
12
Costante di tempo elettrica
Tel
ms
32
Costanti fisiche
Costante di tempo meccanica
Tmecc
ms
2,1
Costante di tempo termica
Tth
min
16
Resistenza torsionale dell'albero
ct
Nm/rad
12400000
Peso
m
kg
279
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
120
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
D
E
F
0>1P@
6.
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-30
1FW3206-1☐E
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
121
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 32 1FW3206, numero di giri nominale 300 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3206-1☐H
N. di giri nominale
nN
1/min
300
Numero di poli
2p
28
Coppia nominale
MN (100 K)
Nm
1500
Potenza nominale
PN (100 K)
kW
47,1
Corrente nominale
IN (100 K)
A
118
Coppia da fermo
M0 (100 K)
Nm
1575
Corrente da fermo
I0 (100 K)
A
121
Momento d'inerzia
Jmot
kgm2
0,97
Trasmissione misura numero di giri
ienc
--
-3,5
(in caso di montaggio encoder tramite
cinghia)
Dati limite
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
700
Coppia massima
Mmax
Nm
2775
Corrente massima
Imax
A
256
Costante di coppia
kT
Nm/A
12,8
Costante di tensione (concatenata)
kE
V/1000 1/min
820
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,08
Induttanza del campo rotante
LD
mH
2,6
Costante di tempo elettrica
Tel
ms
24
Costanti fisiche
Costante di tempo meccanica
Tmecc
ms
1,9
Costante di tempo termica
Tth
min
16
Resistenza torsionale dell'albero
ct
Nm/rad
12400000
Peso
m
kg
279
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
122
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
D
E
F
0>1P@
6.
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-31
1FW3206-1☐H
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
123
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 33 1FW3206, numero di giri nominale 500 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3206-1☐L
N. di giri nominale
nN
1/min
500
Numero di poli
2p
28
Coppia nominale
MN (100 K)
Nm
1400
Potenza nominale
PN (100 K)
kW
73,3
Corrente nominale
IN (100 K)
A
169
Coppia da fermo
M0 (100 K)
Nm
1575
Corrente da fermo
I0 (100 K)
A
189
Momento d'inerzia
Jmot
kgm2
0,97
Trasmissione misura numero di giri
ienc
--
-3,5
(in caso di montaggio encoder tramite
cinghia)
Dati limite
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
1090
Coppia massima
Mmax
Nm
2775
Corrente massima
Imax
A
399
Costante di coppia
kT
Nm/A
8,3
Costante di tensione (concatenata)
kE
V/1000 1/min
530
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,03
Induttanza del campo rotante
LD
mH
1,4
Costante di tempo elettrica
Tel
ms
30
Costanti fisiche
Costante di tempo meccanica
Tmecc
ms
2,0
Costante di tempo termica
Tth
min
16
Resistenza torsionale dell'albero
ct
Nm/rad
12400000
Peso
m
kg
279
Per numeri di giri > 800 1/min è possibile che si verifichi un livello di pressione sonora superiore.
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
124
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
D
E
F
0>1P@
6.
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-32
1FW3206-1☐L
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
125
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 34 1FW3208, numero di giri nominale 150 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3208-1☐E
N. di giri nominale
nN
1/min
150
Numero di poli
2p
28
Coppia nominale
MN (100 K)
Nm
2000
Potenza nominale
PN (100 K)
kW
31,4
Corrente nominale
IN (100 K)
A
84
Coppia da fermo
M0 (100 K)
Nm
2100
Corrente da fermo
I0 (100 K)
A
88
Momento d'inerzia
Jmot
kgm2
1,31
Trasmissione misura numero di giri
ienc
--
-3,5
(in caso di montaggio encoder tramite
cinghia)
Dati limite
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
380
Coppia massima
Mmax
Nm
3700
Corrente massima
Imax
A
187
Costante di coppia
kT
Nm/A
23,8
Costante di tensione (concatenata)
kE
V/1000 1/min
1517
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,21
Induttanza del campo rotante
LD
mH
9,1
Costante di tempo elettrica
Tel
ms
31
Costanti fisiche
Costante di tempo meccanica
Tmecc
ms
2
Costante di tempo termica
Tth
min
20
Resistenza torsionale dell'albero
ct
Nm/rad
9550000
Peso
m
kg
348
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
126
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
D
E
F
0>1P@
6.
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-33
1FW3208-1☐E
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
127
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 35 1FW3208, numero di giri nominale 300 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3208-1☐H
N. di giri nominale
nN
1/min
300
Numero di poli
2p
28
Coppia nominale
MN (100 K)
Nm
2000
Potenza nominale
PN (100 K)
kW
62,8
Corrente nominale
IN (100 K)
A
153
Coppia da fermo
M0 (100 K)
Nm
2100
Corrente da fermo
I0 (100 K)
A
160
Momento d'inerzia
Jmot
kgm2
1,31
Trasmissione misura numero di giri
ienc
--
-3,5
(in caso di montaggio encoder tramite
cinghia)
Dati limite
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
690
Coppia massima
Mmax
Nm
3700
Corrente massima
Imax
A
340
Costante di coppia
kT
Nm/A
13,1
Costante di tensione (concatenata)
kE
V/1000 1/min
834
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,06
Induttanza del campo rotante
LD
mH
2
Costante di tempo elettrica
Tel
ms
26
Costanti fisiche
Costante di tempo meccanica
Tmecc
ms
1,8
Costante di tempo termica
Tth
min
20
Resistenza torsionale dell'albero
ct
Nm/rad
9550000
Peso
m
kg
348
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
128
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
D
E
F
0>1P@
6.
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-34
1FW3208-1☐H
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
129
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 36 1FW3208, numero di giri nominale 500 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3208-1☐L
N. di giri nominale
nN
1/min
500
Numero di poli
2p
28
Coppia nominale
MN (100 K)
Nm
1850
Potenza nominale
PN (100 K)
kW
96,8
Corrente nominale
IN (100 K)
A
226
Coppia da fermo
M0 (100 K)
Nm
2100
Corrente da fermo
I0 (100 K)
A
256
Momento d'inerzia
Jmot
kgm2
1,31
Trasmissione misura numero di giri
ienc
--
-3,5
(in caso di montaggio encoder tramite
cinghia)
Dati limite
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
1100
Coppia massima
Mmax
Nm
3700
Corrente massima
Imax
A
533
Costante di coppia
kT
Nm/A
8,2
Costante di tensione (concatenata)
kE
V/1000 1/min
527
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,03
Induttanza del campo rotante
LD
mH
1,0
Costante di tempo elettrica
Tel
ms
26
Costanti fisiche
Costante di tempo meccanica
Tmecc
ms
2,2
Costante di tempo termica
Tth
min
20
Resistenza torsionale dell'albero
ct
Nm/rad
9550000
Peso
m
kg
348
Per numeri di giri > 800 1/min è possibile che si verifichi un livello di pressione sonora superiore.
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
130
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
D
E
F
0>1P@
6.
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-35
1FW3208-1☐L
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
131
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
4.1.3
Altezza d'asse 280, High Torque
Tabella 4- 37 1FW3281, numero di giri nominale 150 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3281-2☐E
N. di giri nominale
nN
1/min
Numero di poli
2p
Coppia nominale
MN (100 K)
Nm
Potenza nominale
PN (100 K)
kW
39
Corrente nominale
IN (100 K)
A
82
150
20
2500
Coppia da fermo
M0 (100 K)
Nm
2550
Corrente da fermo
I0 (100 K)
A
84
Momento d'inerzia
Jmot
kgm2
3,78
Trasmissione misura numero di giri
(in caso di montaggio encoder tramite
cinghia)
ienc
--
-5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
290
Coppia massima
Mmax
Nm
4050
Corrente massima
Imax
A
145
kT
Nm/A
30,4
Dati limite
Costanti fisiche
Costante di coppia
Costante di tensione (concatenata)
kE
V/1000 1/min
1944
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,254
Induttanza del campo rotante
LD
mH
9,68
Costante di tempo elettrica
Tel
ms
27
Costante di tempo meccanica
Tmecc
ms
4,4
Costante di tempo termica
Tth
min
10
Resistenza torsionale dell'albero
ct
Nm/rad
132000000
Peso
m
kg
600
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
132
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
0>1P@
6
D
E
F
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-36
1FW3281-2☐E
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
133
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 38 1FW3281, numero di giri nominale 250 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3281-2☐G
N. di giri nominale
nN
1/min
250
Numero di poli
2p
20
Coppia nominale
MN (100 K)
Nm
2450
Potenza nominale
PN (100 K)
kW
64
Corrente nominale
IN (100 K)
A
126
Coppia da fermo
M0 (100 K)
Nm
2550
Corrente da fermo
I0 (100 K)
A
131
Momento d'inerzia
Jmot
kgm2
3,78
Trasmissione misura numero di giri
(in caso di montaggio encoder tramite
cinghia)
ienc
--
-5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
460
Coppia massima
Mmax
Nm
4050
Corrente massima
Imax
A
226
Costante di coppia
kT
Nm/A
19,5
Costante di tensione (concatenata)
kE
V/1000 1/min
1246
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,105
Dati limite
Costanti fisiche
Induttanza del campo rotante
LD
mH
3,98
Costante di tempo elettrica
Tel
ms
27
Costante di tempo meccanica
Tmecc
ms
4,4
Costante di tempo termica
Tth
min
10
Resistenza torsionale dell'albero
ct
Nm/rad
132000000
Peso
m
kg
600
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
134
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
0>1P@
6
D
E
F
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-37
1FW3281-2☐G
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
135
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 39 1FW3283, numero di giri nominale 150 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3283-2☐E
N. di giri nominale
nN
1/min
150
Numero di poli
2p
20
Coppia nominale
MN (100 K)
Nm
3500
Potenza nominale
PN (100 K)
kW
55
Corrente nominale
IN (100 K)
A
115
Coppia da fermo
M0 (100 K)
Nm
3550
Corrente da fermo
I0 (100 K)
A
116
Momento d'inerzia
Jmot
kgm2
4,64
Trasmissione misura numero di giri
(in caso di montaggio encoder tramite
cinghia)
ienc
--
-5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
290
Coppia massima
Mmax
Nm
5700
Corrente massima
Imax
A
203
Costante di coppia
kT
Nm/A
30,5
Costante di tensione (concatenata)
kE
V/1000 1/min
1953
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,163
Dati limite
Costanti fisiche
Induttanza del campo rotante
LD
mH
6,98
Costante di tempo elettrica
Tel
ms
31
Costante di tempo meccanica
Tmecc
ms
3,4
Costante di tempo termica
Tth
min
12
Resistenza torsionale dell'albero
ct
Nm/rad
108000000
Peso
m
kg
690
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
136
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
0>1P@
6
D
E
F
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-38
1FW3283-2☐E
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
137
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 40 1FW3283, numero di giri nominale 250 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3283-2☐G
N. di giri nominale
nN
1/min
250
Numero di poli
2p
20
Coppia nominale
MN (100 K)
Nm
3450
Potenza nominale
PN (100 K)
kW
90
Corrente nominale
IN (100 K)
A
176
Coppia da fermo
M0 (100 K)
Nm
3550
Corrente da fermo
I0 (100 K)
A
181
Momento d'inerzia
Jmot
kgm2
4,64
Trasmissione misura numero di giri
(in caso di montaggio encoder tramite
cinghia)
ienc
--
-5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
460
Coppia massima
Mmax
Nm
5700
Corrente massima
Imax
A
316
Costante di coppia
kT
Nm/A
19,6
Costante di tensione (concatenata)
kE
V/1000 1/min
1256
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,067
Dati limite
Costanti fisiche
Induttanza del campo rotante
LD
mH
2,89
Costante di tempo elettrica
Tel
ms
31
Costante di tempo meccanica
Tmecc
ms
3,4
Costante di tempo termica
Tth
min
12
Resistenza torsionale dell'albero
ct
Nm/rad
108000000
Peso
m
kg
690
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
138
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
0>1P@
6
D
E
F
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-39
1FW3283-2☐G
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
139
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 41 1FW3285, numero di giri nominale 150 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3285-2☐E
N. di giri nominale
nN
1/min
150
Numero di poli
2p
20
Coppia nominale
MN (100 K)
Nm
5000
Potenza nominale
PN (100 K)
kW
79
Corrente nominale
IN (100 K)
A
160
Coppia da fermo
M0 (100 K)
Nm
5100
Corrente da fermo
I0 (100 K)
A
163
Momento d'inerzia
Jmot
kgm2
5,98
Trasmissione misura numero di giri
(in caso di montaggio encoder tramite
cinghia)
ienc
--
-5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
290
Coppia massima
Mmax
Nm
8150
Corrente massima
Imax
A
284
Costante di coppia
kT
Nm/A
31,2
Costante di tensione (concatenata)
kE
V/1000 1/min
1994
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,107
Dati limite
Costanti fisiche
Induttanza del campo rotante
LD
mH
5,09
Costante di tempo elettrica
Tel
ms
34
Costante di tempo meccanica
Tmecc
ms
2,8
Costante di tempo termica
Tth
min
14
Resistenza torsionale dell'albero
ct
Nm/rad
84700000
Peso
m
kg
860
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
140
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
6
0>1P@
D
E
F
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-40
1FW3285-2☐E
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
141
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 42 1FW3285, numero di giri nominale 250 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3285-2☐G
N. di giri nominale
nN
1/min
250
Numero di poli
2p
20
Coppia nominale
MN (100 K)
Nm
4950
Potenza nominale
PN (100 K)
kW
130
Corrente nominale
IN (100 K)
A
244
Coppia da fermo
M0 (100 K)
Nm
5100
Corrente da fermo
I0 (100 K)
A
251
Momento d'inerzia
Jmot
kgm2
5,98
Trasmissione misura numero di giri
(in caso di montaggio encoder tramite
cinghia)
ienc
--
-5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
440
Coppia massima
Mmax
Nm
8150
Corrente massima
Imax
A
436
Costante di coppia
kT
Nm/A
20,3
Costante di tensione (concatenata)
kE
V/1000 1/min
1296
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,0451
Dati limite
Costanti fisiche
Induttanza del campo rotante
LD
mH
2,15
Costante di tempo elettrica
Tel
ms
34
Costante di tempo meccanica
Tmecc
ms
2,7
Costante di tempo termica
Tth
min
14
Resistenza torsionale dell'albero
ct
Nm/rad
8,4700000
Peso
m
kg
860
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
142
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
6
0>1P@
D
E
F
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-41
1FW3285-2☐G
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
143
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 43 1FW3287, numero di giri nominale 150 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3287-2☐E
N. di giri nominale
nN
1/min
150
Numero di poli
2p
20
Coppia nominale
MN (100 K)
Nm
7000
Potenza nominale
PN (100 K)
kW
110
Corrente nominale
IN (100 K)
A
230
Coppia da fermo
M0 (100 K)
Nm
7150
Corrente da fermo
I0 (100 K)
A
234
Momento d'inerzia
Jmot
kgm2
7,81
Trasmissione misura numero di giri (in
caso di montaggio encoder tramite
cinghia)
ienc
--
-5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
290
Coppia massima
Mmax
Nm
11400
Corrente massima
Imax
A
406
Costante di coppia
kT
Nm/A
30,5
Costante di tensione (concatenata)
kE
V/1000 1/min
1953
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,0679
Dati limite
Costanti fisiche
Induttanza del campo rotante
LD
mH
3,49
Costante di tempo elettrica
Tel
ms
37
Costante di tempo meccanica
Tmecc
ms
2,4
Costante di tempo termica
Tth
min
16
Resistenza torsionale dell'albero
ct
Nm/rad
65800000
Peso
m
kg
1030
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
144
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
6
0>1P@
D
E
F
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-42
1FW3287-2☐E
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
145
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 44 1FW3287, numero di giri nominale 250 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3287-2☐G
N. di giri nominale
nN
1/min
250
Numero di poli
2p
20
Coppia nominale
MN (100 K)
Nm
6900
Potenza nominale
PN (100 K)
kW
181
Corrente nominale
IN (100 K)
A
352
Coppia da fermo
M0 (100 K)
Nm
7150
Corrente da fermo
I0 (100 K)
A
365
Momento d'inerzia
Jmot
kgm2
7,81
Trasmissione misura numero di giri (in
caso di montaggio encoder tramite
cinghia)
ienc
--
-5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
460
Coppia massima
Mmax
Nm
11400
Corrente massima
Imax
A
632
Costante di coppia
kT
Nm/A
19,6
Costante di tensione (concatenata)
kE
V/1000 1/min
1256
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,0281
Dati limite
Costanti fisiche
Induttanza del campo rotante
LD
mH
1,44
Costante di tempo elettrica
Tel
ms
37
Costante di tempo meccanica
Tmecc
ms
2,4
Costante di tempo termica
Tth
min
16
Resistenza torsionale dell'albero
ct
Nm/rad
65800000
Peso
m
kg
1030
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
146
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
6
0>1P@
D
E
F
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-43
1FW3287-2☐G
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
147
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
4.1.4
Altezza d'asse 280, High Speed
Tabella 4- 45 1FW3281, numero di giri nominale 400 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3281-3☐J
N. di giri nominale
nN
1/min
Numero di poli
2p
Coppia nominale
MN (100 K)
Nm
Potenza nominale
PN (100 K)
kW
98
Corrente nominale
IN (100 K)
A
188
400
20
2350
Coppia da fermo
M0 (100 K)
Nm
2500
Corrente da fermo
I0 (100 K)
A
200
Momento d'inerzia
Jmot
kgm2
3,78
Trasmissione misura numero di giri (in
caso di montaggio encoder tramite
cinghia)
ienc
--
-5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
720
Coppia massima
Mmax
Nm
4050
Corrente massima
Imax
A
352
kT
Nm/A
12,5
Dati limite
Costanti fisiche
Costante di coppia
Costante di tensione (concatenata)
kE
V/1000 1/min
798
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,0427
Induttanza del campo rotante
LD
mH
1,63
Costante di tempo elettrica
Tel
ms
27
Costante di tempo meccanica
Tmecc
ms
4,3
Costante di tempo termica
Tth
min
10
Resistenza torsionale dell'albero
ct
Nm/rad
132000000
Peso
m
kg
600
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
148
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
0>1P@
6.
D
E
F
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-44
1FW3281-3☐J
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
149
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 46 1FW3281, numero di giri nominale 600 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3281-3☐M
N. di giri nominale
nN
1/min
600
Numero di poli
2p
20
Coppia nominale
MN (100 K)
Nm
2200
Potenza nominale
PN (100 K)
kW
138
Corrente nominale
IN (100 K)
A
256
Coppia da fermo
M0 (100 K)
Nm
2500
Corrente da fermo
I0 (100 K)
A
291
Momento d'inerzia
Jmot
kgm2
3,78
Trasmissione misura numero di giri (in
caso di montaggio encoder tramite
cinghia)
ienc
--
-5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
1050
Coppia massima
Mmax
Nm
4050
Corrente massima
Imax
A
512
Costante di coppia
kT
Nm/A
8,6
Costante di tensione (concatenata)
kE
V/1000 1/min
548
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,0202
Dati limite
Costanti fisiche
Induttanza del campo rotante
LD
mH
0,77
Costante di tempo elettrica
Tel
ms
27
Costante di tempo meccanica
Tmecc
ms
4,3
Costante di tempo termica
Tth
min
10
Resistenza torsionale dell'albero
ct
Nm/rad
132000000
Peso
m
kg
600
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
150
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
0>1P@
6
D
E
F
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-45
1FW3281-3☐M
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
151
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 47 1FW3283, numero di giri nominale 400 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3283-3☐J
N. di giri nominale
nN
1/min
400
Numero di poli
2p
20
Coppia nominale
MN (100 K)
Nm
3300
Potenza nominale
PN (100 K)
kW
138
Corrente nominale
IN (100 K)
A
275
Coppia da fermo
M0 (100 K)
Nm
3500
Corrente da fermo
I0 (100 K)
A
292
Momento d'inerzia
Jmot
kgm2
4,64
Trasmissione misura numero di giri (in
caso di montaggio encoder tramite
cinghia)
ienc
--
-5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
750
Coppia massima
Mmax
Nm
5700
Corrente massima
Imax
A
516
Costante di coppia
kT
Nm/A
12,0
Costante di tensione (concatenata)
kE
V/1000 1/min
767
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,0251
Dati limite
Costanti fisiche
Induttanza del campo rotante
LD
mH
1,08
Costante di tempo elettrica
Tel
ms
31
Costante di tempo meccanica
Tmecc
ms
3,4
Costante di tempo termica
Tth
min
12
Resistenza torsionale dell'albero
ct
Nm/rad
108000000
Peso
m
kg
690
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
152
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
0>1P@
6.
D
E
F
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-46
1FW3283-3☐J
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
153
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 48 1FW3283, numero di giri nominale 600 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3283-3☐M
N. di giri nominale
nN
1/min
600
Numero di poli
2p
20
Coppia nominale
MN (100 K)
Nm
3100
Potenza nominale
PN (100 K)
kW
195
Corrente nominale
IN (100 K)
A
357
Coppia da fermo
M0 (100 K)
Nm
3500
Corrente da fermo
I0 (100 K)
A
402
Momento d'inerzia
Jmot
kgm2
4,64
Trasmissione misura numero di giri (in
caso di montaggio encoder tramite
cinghia)
ienc
--
-5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
1030
Coppia massima
Mmax
Nm
5700
Corrente massima
Imax
A
712
Costante di coppia
kT
Nm/A
8,7
Costante di tensione (concatenata)
kE
V/1000 1/min
558
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,0133
Dati limite
Costanti fisiche
Induttanza del campo rotante
LD
mH
0,57
Costante di tempo elettrica
Tel
ms
31
Costante di tempo meccanica
Tmecc
ms
3,4
Costante di tempo termica
Tth
min
12
Resistenza torsionale dell'albero
ct
Nm/rad
108000000
Peso
m
kg
690
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
154
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
0>1P@
6.
D
E
F
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-47
1FW3283-3☐M
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
155
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 49 1FW3285, numero di giri nominale 400 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3285-3☐J
N. di giri nominale
nN
1/min
400
Numero di poli
2p
20
Coppia nominale
MN (100 K)
Nm
4700
Potenza nominale
PN (100 K)
kW
197
Corrente nominale
IN (100 K)
A
376
Coppia da fermo
M0 (100 K)
Nm
5000
Corrente da fermo
I0 (100 K)
A
400
Momento d'inerzia
Jmot
kgm2
5,98
Trasmissione misura numero di giri (in
caso di montaggio encoder tramite
cinghia)
ienc
--
-5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
720
Coppia massima
Mmax
Nm
8150
Corrente massima
Imax
A
709
Costante di coppia
kT
Nm/A
12,5
Costante di tensione (concatenata)
kE
V/1000 1/min
798
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,0171
Dati limite
Costanti fisiche
Induttanza del campo rotante
LD
mH
0,815
Costante di tempo elettrica
Tel
ms
34
Costante di tempo meccanica
Tmecc
ms
2,7
Costante di tempo termica
Tth
min
14
Resistenza torsionale dell'albero
ct
Nm/rad
84700000
Peso
m
kg
860
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
156
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
6.
0>1P@
D
E
F
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-48
1FW3285-3☐J
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
157
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 50 1FW3285, numero di giri nominale 600 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3285-3☐M
N. di giri nominale
nN
1/min
600
Numero di poli
2p
20
Coppia nominale
MN (100 K)
Nm
4400
Potenza nominale
PN (100 K)
kW
276
Corrente nominale
IN (100 K)
A
469
Coppia da fermo
M0 (100 K)
Nm
5000
Corrente da fermo
I0 (100 K)
A
532
Momento d'inerzia
Jmot
kgm2
5,98
Trasmissione misura numero di giri (in
caso di montaggio encoder tramite
cinghia)
ienc
--
-5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
960
Coppia massima
Mmax
Nm
8150
Corrente massima
Imax
A
942
Costante di coppia
kT
Nm/A
9,4
Costante di tensione (concatenata)
kE
V/1000 1/min
598
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,0096
Dati limite
Costanti fisiche
Induttanza del campo rotante
LD
mH
0,458
Costante di tempo elettrica
Tel
ms
34
Costante di tempo meccanica
Tmecc
ms
2,7
Costante di tempo termica
Tth
min
14
Resistenza torsionale dell'albero
ct
Nm/rad
84700000
Peso
m
kg
860
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
158
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
6.
0>1P@
D
E
F
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-49
1FW3285-3☐M
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
159
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 51 1FW3287, numero di giri nominale 400 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3287-3☐J
N. di giri nominale
nN
1/min
400
Numero di poli
2p
20
Coppia nominale
MN (100 K)
Nm
6600
Potenza nominale
PN (100 K)
kW
276
Corrente nominale
IN (100 K)
A
504
Coppia da fermo
M0 (100 K)
Nm
7000
Corrente da fermo
I0 (100 K)
A
534
Momento d'inerzia
Jmot
kgm2
7,81
Trasmissione misura numero di giri (in
caso di montaggio encoder tramite
cinghia)
ienc
--
-5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
690
Coppia massima
Mmax
Nm
11400
Corrente massima
Imax
A
946
Costante di coppia
kT
Nm/A
13,1
Costante di tensione (concatenata)
kE
V/1000 1/min
837
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,0125
Dati limite
Costanti fisiche
Induttanza del campo rotante
LD
mH
0,641
Costante di tempo elettrica
Tel
ms
37
Costante di tempo meccanica
Tmecc
ms
2,4
Costante di tempo termica
Tth
min
16
Resistenza torsionale dell'albero
ct
Nm/rad
65800000
Peso
m
kg
1030
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
160
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
6.
0>1P@
D
E
F
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-50
1FW3287-3☐J
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
161
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
Tabella 4- 52 1FW3287, numero di giri nominale 600 1/min
Dati di progettazione
Abbreviazion
e
Unità
1FW3287-3☐M
N. di giri nominale
nN
1/min
600
Numero di poli
2p
20
Coppia nominale
MN (100 K)
Nm
6050
Potenza nominale
PN (100 K)
kW
380
Corrente nominale
IN (100 K)
A
696
Coppia da fermo
M0 (100 K)
Nm
6850
Corrente da fermo
I0 (100 K)
A
787
Momento d'inerzia
Jmot
kgm2
7,81
Trasmissione misura numero di giri (in
caso di montaggio encoder tramite
cinghia)
ienc
--
-5
Numero di giri max. ammesso (mecc.)
nmax mecc
1/min
1000
Numero di giri max. ammesso senza
VPM
nmax 830 V
1/min
1030
Coppia massima
Mmax
Nm
11400
Corrente massima
Imax
A
1424
Costante di coppia
kT
Nm/A
8,7
Costante di tensione (concatenata)
kE
V/1000 1/min
558
Resistenza avvolgimento a 20 °C
Rfase
Ω
0,0055
Dati limite
Costanti fisiche
Induttanza del campo rotante
LD
mH
0,258
Costante di tempo elettrica
Tel
ms
37
Costante di tempo meccanica
Tmecc
ms
2,4
Costante di tempo termica
Tth
min
16
Resistenza torsionale dell'albero
ct
Nm/rad
65800000
Peso
m
kg
1030
I dati nominali indicati sono validi per Urete eff = 400 V, Active Line Module, curva caratteristica [b].
162
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.1 Curve caratteristiche coppia-numero di giri
0>1P@
6.
D
E
F
Q>USP@
[a]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 400 V
[b]
SINAMICS S120 Active Line Module, Urete eff = 400 V
[c]
SINAMICS S120 Smart Line Module / Basic Line Module / Power Module, Urete eff = 480 V
Le curve caratteristiche sono valide solo per i dati di impostazione del convertitore ottimizzati
Figura 4-51
1FW3287-3☐M
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
163
Dati tecnici e curve caratteristiche
4.2 Disegni quotati
4.2
Disegni quotati
CAD CREATOR
Il CAD CREATOR, mediante un'interfaccia di configurazione facilmente comprensibile,
consente di creare rapidamente
● disegni quotati
● dati CAD 2D/3D
e offre un supporto per realizzare la documentazione degli impianti a livello di informazioni
specifiche di progettazione.
Nella versione online sono attualmente disponibili i dati per i motori, gli azionamenti e i
controllori CNC. Nella intranet all'indirizzo http://www.siemens.com/cad-creator
Motori
● Motori sincroni 1FK7, 1FT7, 1FT6, 1FE1
● Motori Torque completi 1FW3
● Motoriduttori 1FK7, 1FK7 DYA, 1FT7, 1FT6
● Motori sincroni/asincroni 1PH8
● Motori asincroni 1PH7, 1PL4, 1PH6
● Motori asincroni 1PM4, 1PM6
● Elettromandrini 2SP1
SINAMICS S120
● Control Unit
● Power Module (Blocksize, Chassis)
● Line Module (Booksize, Chassis)
● Componenti lato rete
● Motor Module (Booksize, Chassis)
● Componenti del circuito intermedio
● Componenti di sistema aggiuntivi
● Collegamento del sistema encoder
● Tecnica di collegamento MOTION-CONNECT
SIMOTION
● SIMOTION D
SINUMERIK solution line
● Controllori
● Componenti operativi per controlli CNC
164
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.2 Disegni quotati
Aggiornamento dei disegni quotati
Nota
La Siemens AG si riserva la facoltà di apportare, senza alcun preavviso, modifiche alle
dimensioni della macchina, al fine di migliorare il prodotto. Quindi è possibile che i disegni
quotati non siano aggiornati. I disegni quotati aggiornati possono essere richiesti
gratuitamente al reparto di vendita della sede Siemens competente.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
165
Dati tecnici e curve caratteristiche
4.2 Disegni quotati
4.2.1
Montaggio encoder mediante cinghia dentata
Figura 4-52
Motore Torque completo 1FW315⃞, montaggio encoder mediante cinghia dentata
166
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.2 Disegni quotati
Figura 4-53
Motore Torque completo 1FW320⃞, montaggio encoder mediante cinghia dentata
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
167
Dati tecnici e curve caratteristiche
4.2 Disegni quotati
Figura 4-54
168
Motore Torque completo 1FW328⃞, montaggio encoder mediante cinghia dentata
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.2 Disegni quotati
4.2.2
Montaggio coassiale dell'encoder
Figura 4-55
Motore Torque completo 1FW315⃞, montaggio encoder coassiale
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
169
Dati tecnici e curve caratteristiche
4.2 Disegni quotati
Figura 4-56
170
Motore Torque completo 1FW320⃞, montaggio encoder coassiale
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.2 Disegni quotati
Figura 4-57
Motore Torque completo 1FW328⃞, montaggio encoder coassiale
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
171
Dati tecnici e curve caratteristiche
4.2 Disegni quotati
4.2.3
Senza encoder
Figura 4-58
Motore Torque completo 1FW315⃞, senza encoder
172
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.2 Disegni quotati
Figura 4-59
Motore Torque completo 1FW320⃞, senza encoder
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
173
Dati tecnici e curve caratteristiche
4.2 Disegni quotati
Figura 4-60
174
Motore Torque completo 1FW328⃞, senza encoder
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Dati tecnici e curve caratteristiche
4.2 Disegni quotati
4.2.4
DE senza cuscinetto
Figura 4-61
DE senza cuscinetto
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
175
Dati tecnici e curve caratteristiche
4.2 Disegni quotati
176
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
5
Componenti del motore
5.1
Protezione termica del motore
KTY 84 (termistore)
Per sorvegliare la temperatura del motore, come sonda termica è stata integrata una
resistenza termica nell'avvolgimento dello statore.
Tabella 5- 1
Caratteristiche e dati tecnici
Denominazione
Descrizione
Tipo
KTY 84 (termistore)
Resistenza al freddo (20 °C)
ca. 580 Ω
Resistenza al caldo (100 °C)
ca. 1000 Ω
Temperatura di intervento
Preallarme: 120 °C ±5° C
Disinserzione: 155 °C ±5° C
Collegamento
tramite il cavo di segnale
AVVERTENZA
La polarità deve essere rispettata.
La variazione della resistenza di KTY 84 è proporzionale alla variazione della temperatura
dell'avvolgimento (vedere la figura seguente).
5>N˖@
,
' P$
Figura 5-1
˽>r&@
X
Andamento della sonda termica KTY 84 in funzione della temperatura
La valutazione di KTY 84 ha luogo nel convertitore, la cui regolazione tiene conto
dell'andamento della temperatura dell'avvolgimento del motore. In caso di anomalie, il
convertitore emette il relativo messaggio di errore. Se la temperatura aumenta, viene
emesso un messaggio "Preallarme sovratemperatura motore", che può essere elaborato
esternamente. Se il messaggio viene ignorato, una volta trascorso il tempo impostato oppure
in caso di superamento della temperatura limite del motore o della temperatura di
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
177
Componenti del motore
5.1 Protezione termica del motore
disinserzione, il convertitore viene disinserito e viene emesso il messaggio di errore
corrispondente.
CAUTELA
La sonda termica KTY integrata protegge i motori Torque completi dai sovraccarichi:
fino a 2 • I0 e velocità ≠ 0
Per i casi di carico termicamente critici, ad es. elevato sovraccarico a motore fermo, non è
più disponibile una protezione sufficiente. Deve quindi essere prevista un'ulteriore
protezione, ad es. un relè termico di sovracorrente o un termistore PTC (opzionale)
Se il sovraccarico massimo si prolunga per oltre 4 s, deve essere prevista anche
un'ulteriore protezione del motore.
La sonda termica è realizzata secondo i requisiti DIN/EN relativi alla "separazione galvanica
sicura".
AVVERTENZA
Se l'operatore intende eseguire un'ulteriore prova ad alta tensione, le estremità dei cavi dei
sensori di temperatura vanno cortocircuitate prima della prova! L'applicazione della
tensione di prova su un solo morsetto di collegamento del sensore di temperatura provoca
la distruzione del sensore.
Termistore PTC (opzionale)
Nel caso di applicazioni speciali (ad es. sovraccarico a motore fermo oppure velocità molto
basse) è necessaria un'ulteriore dispositivo di sorveglianza della temperatura su tutte e tre le
fasi del motore tramite una sonda termica tripla PTC.
Possibilità di ordinazione: Codice A11.
Tabella 5- 2
Collegamento e valutazione della sonda termica tripla PTC
Motori con interfaccia DRIVE-CLiQ
Motori senza interfaccia DRIVE-CLiQ
Il termistore PTC viene collegato al
sistema di azionamento tramite il cavo
DRIVE-CLiQ. La valutazione del termistore
PTC deve essere attivata in SINAMICS
(vedere la bibliografia: /GH1/ SINAMICS
S120, Control Units e componenti di
sistema integrativi).
Per la valutazione del termistore PTC è necessario disporre di un dispositivo
di sgancio esterno (non compreso nella fornitura). In tal modo è possibile
sorvegliare anche la rottura e il cortocircuito del cavo del termistore. Al
superamento della temperatura di intervento il motore deve essere
commutato in stato di arresto senza corrente entro 1 secondo.
178
I collegamenti del termistore si trovano nella morsettiera di potenza. Per il
collegamento nella morsettiera è previsto un apposito foro di introduzione
cavo M16 x 1,5.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Componenti del motore
5.1 Protezione termica del motore
3DVVDFDYR
0RUVHWWR
Figura 5-2
Collegamento per triplice PTC
3URWH]LRQHPRWRUHDWHUPLVWRUH51*:
0RWRUH7RUTXH):FRPSOHWR
7
9
$
:
$&9
$
7
73
ELDQFR
˽
,QJUHVVR
37&
˽
3/&
73 URVVR
8
8VFLWD
5 PDUURQH
˽
˽
.7<
5 ELDQFR
&DQFHOOD]LRQH
LPSXOVLR
FRSSLD]HUR
0 1P
9
&RQYHUWLWRUH
1RWH
.7< 5LVSHWWDUHODSRODULW¢
37&
,QGLSHQGHQWHGDOODSRODULW¢
3/&
9HULILFDUHLOFRUUHWWRIXQ]LRQDPHQWRLQDSHUWXUDGHOFLUFXLWRGLGLVLQVHU]LRQHWUDPLWH3/&FRQWUROORUH
ORJLFRSURJUDPPDELOHSULPDGLPHWWHUHLQVHUYL]LRLOPRWRUH
Figura 5-3
Collegamento della sorveglianza di temperatura
Tabella 5- 3
Dati tecnici della sonda termica tripla PTC
Denominazione
Descrizione
Tipo
Sonda termica tripla PTC
Resistenza al caldo (20 °C)
≤ 750 Ω
Resistenza al caldo (180 °C)
≤ 1710 Ω
Temperatura di intervento
180 °C
Collegamento
Tramite unità di rilevamento esterna
Nota:
Le sonde termiche non presentano una curva caratteristica lineare e non sono quindi idonee per
rilevare la temperatura istantanea. Curva caratteristica secondo DIN VDE 0660 parte 303, DIN
44081, DIN 44082
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
179
Componenti del motore
5.2 Encoder (opzionale)
5.2
Encoder (opzionale)
Il funzionamento regolato in velocità è possibile in modo illimitato.
ATTENZIONE
Il funzionamento regolato in posizione è possibile solo con alcune limitazioni. Contattare
quindi la propria rappresentanza Siemens competente.
In caso di sostituzione dell'encoder è necessario regolare la posizione dell'encoder rispetto
alla FEM motore. La sostituzione può essere eseguita solo da personale qualificato.
La taratura originale degli encoder è realizzata per i convertitori SIEMENS. Per far
funzionare il motore con un convertitore di terze parti può essere necessario modificare la
taratura dell'encoder.
Una taratura errata dell'encoder rispetto alla FEM motore può provocare movimenti
incontrollati.
La scelta dell'encoder viene definita nel codice di ordinazione (MLFB) del motore alla 9ª
posizione mediante la lettera corrispondente. La lettera da specificare alla 9ª posizione del
codice di ordinazione (MLFB) è diversa per i motori con o senza DRIVE-CLiQ.
In caso di montaggio encoder tramite cinghia: 11ª posizione del codice di ordinazione = 7
In caso di montaggio coassiale dell'encoder: 11ª posizione del codice di ordinazione = 6
Tabella 5- 4
Indicazione per la scelta dell'encoder nel codice di ordinazione (MLFB)
Tipo di encoder
Lettera nella 9ª
posizione del codice di
ordinazione (MLFB)
Motori senza interfaccia DRIVE-CLiQ
Encoder incrementale sen/cos 1 Vpp 2048 S/R con tracce C e D (encoder
IC2048S/R), accoppiato tramite cinghia
A
Encoder assoluto 2048 S/R Singleturn, 4096 rotazioni Multiturn, con
interfaccia EnDat (encoder AM2048S/R), accoppiato tramite cinghia o
montaggio coassiale su NDE
E
Encoder assoluto Singleturn EnDat, 2048 S/R, montaggio coassiale su NDE
N
Resolver multipolare (p = x), accoppiato tramite cinghia
S
Motori con interfaccia DRIVE-CLiQ
Encoder incrementale 22 bit (risoluzione 4.194.304, internamente
all'encoder 2048 S/R) con posizione di commutazione 11 bit (encoder
IC22DQ), accoppiato tramite cinghia
Encoder assoluto 22 bit Singleturn (risoluzione 4.194.304, internamente
all'encoder 2048 S/R) + 12 bit Multiturn (campo di rilevamento 4096 giri)
(encoder AM22DQ), accoppiato tramite cinghia o montaggio coassiale su
NDE
Encoder assoluto 22 bit Singleturn (2048 S/R internamente all'encoder),
montaggio coassiale su NDE
Resolver 15 bit (risoluzione 32.768, internamente multipolare) (R15DQ),
accoppiato tramite cinghia
180
D
F
P
U
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Componenti del motore
5.2 Encoder (opzionale)
Encoder con trasmissione a cinghia
Nell'apposita cassa (lato statore), l'encoder viene collegato tramite cinghia. L'albero caso
può quindi essere utilizzato, ad esempio, per la conduzione di liquidi. Rapporto di
trasmissione: vedere il capitolo "Resolver multipolare".
ATTENZIONE
La sostituzione della cinghia può essere eseguita solo da personale qualificato. Viene
richiesto uno strumento per la misura della tensione della cinghia.
Figura 5-4
Encoder con trasmissione a cinghia
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
181
Componenti del motore
5.2 Encoder (opzionale)
Montaggio coassiale dell'encoder
Per requisiti dinamici elevati ed estrema precisione sussiste la possibilità di montaggio
coassiale dell'encoder. Il montaggio coassiale dell'encoder chiude l'albero cavo sul lato NDE.
Figura 5-5
182
Montaggio coassiale dell'encoder
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Componenti del motore
5.2 Encoder (opzionale)
5.2.1
Collegamento trasduttore per motori con interfaccia DRIVE-CLiQ
I motori con DRIVE-CLiQ hanno un Sensor Module che contiene l'analisi dell'encoder, il
rilevamento della temperatura del motore e una targhetta elettronica del tipo.
Questo Sensor Module è montato in sostituzione del connettore segnali ed ha un connettore
femmina RJ45-plus a 10 poli.
CAUTELA
L'interfaccia DRIVE-CLiQ contiene dati specifici su motore ed encoder oltre a una targhetta
elettronica del tipo, quindi può essere utilizzato solo per un motore originale e non per altri
motori e non può essere sostituito con l'interfaccia DRIVE-CLiQ di altri motori.
L'interfaccia DRIVE-CLiQ è a diretto contatto con componenti sensibili alle cariche
elettrostatiche (ESD). Devono essere rispettate le misure di sicurezza ESD descritte nella
prefazione.
Cavi
Per tutti i tipi di encoder (encoder incrementale, encoder assoluto, resolver) vale lo stesso
cavo DRIVE-CLiQ.
Per il collegamento di un encoder si utilizza il seguente cavo:
Tabella 5- 5
Cavo confezionato
6FX ☐ 002
- ☐DC☐☐
- ☐☐☐ 0
↓
↓↓↓
↓
Lunghezza
5 MOTIONCONNECTⓇ500
max. lunghezza del cavo 100 m
8 MOTIONCONNECTⓇ800
max. lunghezza del cavo 50 m
Si devono utilizzare solo cavi confezionati di Siemens (MOTION-CONNECT).
Per ulteriori dati tecnici e per i codici relativi alle varie lunghezze, consultare il Catalogo,
capitolo "Tecnica di collegamento MOTION-CONNECT".
5.2.2
Collegamento trasduttore per motori senza interfaccia DRIVE-CLiQ
I motori senza interfaccia DRIVE-CLiQ vengono collegati tramite il connettore flangiato a 12
o 17 poli.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
183
Componenti del motore
5.2 Encoder (opzionale)
5.2.3
Encoder incrementale sin/cos 1 Vpp
Funzione:
● Sistema di misura angolare per commutazione
● Rilevamento del valore attuale del numero di giri
● Sistema di misura incrementale indiretto per anello di regolazione della posizione
● Un impulso di zero (tacca di riferimento) al giro
Tabella 5- 6
Dati tecnici dell'encoder incrementale sen/cos 1 Vpp
Tensione di esercizio
+5V±5%
Corrente assorbita
max. 150 mA
Risoluzione incrementale (periodi per rotazione)
2048
Segnali incrementali
1 Vpp
Errore angolare picco-picco
± 40 ''
Traccia C-D (posizione del rotore)
presente
8>9@
rHO
$
%
5
rHO
rPHFK
Ǿ
Ǿ
rHO
Ǿ
rHOsrHO
8>9@
&
'
5
Ǿ
Ǿ
Ǿ
rHO rPHFK
Figura 5-6
184
Sequenza dei segnali e abbinamento con rotazione positiva (rotazione destrorsa vista
dal lato DE)
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Componenti del motore
5.2 Encoder (opzionale)
Assegnazione dei pin del connettore flangiato a 17 poli con contatti a spina
Tabella 5- 7
Assegnazione dei pin del connettore flangiato a 17 poli
N. PIN
Segnale
1
A
2
A*
3
R
4
D*
5
C
6
C*
7
M–Encoder
8
+1R1
9
–1R2
10
P–Encoder
11
B
12
B*
13
R*
14
D
15
0 V Sense
16
5 V Sense
17
not connected
Vista lato connettore (pin)
Cavi
Tabella 5- 8
Cavo confezionato
6FX ☐ 002
- 2CA31
- ☐☐☐
0
↓
↓↓↓
↓
Lunghezza
5 MOTIONCONNECTⓇ500
Lunghezza max cavo 100 m
8 MOTIONCONNECTⓇ800
Controconnettore: 6FX2003-0SU17 (femmina)
Per ulteriori dati tecnici e per i codici relativi alle varie lunghezze consultare il Catalogo,
capitolo "Tecnica di collegamento MOTION-CONNECT"
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
185
Componenti del motore
5.2 Encoder (opzionale)
5.2.4
Encoder assoluto
Funzione:
● Sistema di misura angolare per commutazione
● Rilevamento del valore attuale del numero di giri
● Sistema di misura assoluto indiretto per anello di regolazione della posizione
Tabella 5- 9
Dati tecnici encoder assoluto
Proprietà
Encoder assoluto Multiturn
EnDat (A-2048)
Encoder assoluto Singleturn
EnDat (A-2048)
Tensione di esercizio
5 V ± 5%
5 V ± 5%
Corrente assorbita
max. 300 mA
max. 150 mA
Risoluzione incrementale (periodi per rotazione)
2048
2048
Risoluzione assoluta (rotazioni codificate)
4096
1
Segnali incrementali
1 Vpp
1 Vpp
Interfaccia seriale per posizione assoluta
EnDat
EnDat
Errore angolare picco-picco
± 40’’
± 40’’
Assegnazione dei pin del connettore flangiato a 17 poli con contatti a spina
Tabella 5- 10 Assegnazione dei pin del connettore flangiato a 17 poli
186
N. PIN
Segnale
1
A
2
A*
3
data
4
not connected
5
clock
6
not connected
7
M–Encoder
8
+1R1
9
–1R2
10
P–Encoder
11
B
12
B*
13
data*
14
clock*
15
0 V Sense
16
5 V Sense
17
not connected
Vista lato connettore (pin)
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Componenti del motore
5.2 Encoder (opzionale)
Cavi
Tabella 5- 11 Cavo confezionato
6FX ☐ 002
- 2EQ10 - ☐☐☐
0
↓
↓↓↓
↓
Lunghezza
5 MOTIONCONNECTⓇ500
max. lunghezza del cavo 100 m
8 MOTIONCONNECTⓇ800
Controconnettore: 6FX2003-0SU17 (femmina)
Per ulteriori dati tecnici e per i codici relativi alle varie lunghezze consultare il Catalogo,
capitolo "Tecnica di collegamento MOTION-CONNECT"
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
187
Componenti del motore
5.2 Encoder (opzionale)
5.2.5
Resolver multipolare
Funzione:
● Sistema di misura angolare per commutazione
● Rilevamento del valore attuale del numero di giri
● Sistema di misura incrementale indiretto per anello di regolazione della posizione
Tabella 5- 12 Dati tecnici del resolver
Caratteristiche
a 8 poli
(per altezza d'asse 200 e 280)
Tensione di eccitazione
a 4 poli
(con altezza d'asse 150)
da + 5 Veff a + 13 Veff
Frequenza di eccitazione
da 4 kHz a 10 kHz
Corrente assorbita
< 80 mAeff
Errore angolare picco-picco
Resolver multipolare = numero poli
motore
Rapporto di trasmissione elettrico
<4'
< 10 '
8
4
0,5
8 7UDFFLDVHQR
D DUFWDQ
87UDFFLDVHQR
87UDFFLDFRVHQR
8 7UDFFLDFRVHQR
Figura 5-7
188
Segnali di uscita del resolver
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Componenti del motore
5.2 Encoder (opzionale)
Assegnazione dei pin del connettore flangiato a 12 poli con contatti a spina
Tabella 5- 13 Assegnazione dei pin del connettore flangiato a 12 poli
N. PIN
Segnale
1
S2
2
S4
3
not connected
4
not connected
5
not connected
6
not connected
7
R2
8
+1R1
9
–1R2
10
R1
11
S1
12
S3
Vista lato connettore (pin)
Cavi
Tabella 5- 14 Cavo confezionato
6FX ☐ 002
- 2CF02
- ☐☐☐
0
↓
↓↓↓
↓
Lunghezza
5 MOTIONCONNECTⓇ500
Lunghezza max cavo 150 m
8 MOTIONCONNECTⓇ800
Controconnettore: 6FX2003-0SU12 (femmina)
Per ulteriori dati tecnici e per i codici relativi alle varie lunghezze consultare il Catalogo,
capitolo "Tecnica di collegamento MOTION-CONNECT"
5.2.6
Esecuzione motore senza encoder
Nelle esecuzioni del motore senza encoder manca il connettore del segnale.
Per il collegamento del sensore di temperatura KTY e del sensore KTY sostitutivo vengono
utilizzati la canalina passacavi e il morsetto della morsettiera.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
189
Componenti del motore
5.3 Resistenze di frenatura (funzione di frenatura mediante cortocircuito dell'armatura)
5.3
Resistenze di frenatura (funzione di frenatura mediante cortocircuito
dell'armatura)
5.3.1
Descrizione delle funzioni
In caso di superamento dei valori di tensione del circuito intermedio o di un guasto
all'elettronica non è più possibile frenare elettricamente il convertitore PWM a transistori. Nel
caso in cui la rotazione incontrollata dell'azionamento sia fonte di pericolo, è allora possibile
frenare il motore mediante cortocircuito dell'indotto La frenatura mediante cortocircuito
dell'indotto dovrebbe essere eseguita nel campo di movimento dell'asse di avanzamento, al
più tardi, tramite il finecorsa.
Nel calcolo del percorso di fuga dell'asse d'avanzamento vanno considerati sia l'attrito della
meccanica che i tempi di commutazione dei contattori. Per evitare danni meccanici è
necessario predisporre degli ammortizzatori all'estremità del campo di movimento assoluto.
Per i servomotori con freno di stazionamento integrato è possibile diseccitare
contemporaneamente il freno di stazionamento al fine di poter creare, anche se con un
leggero ritardo, un'ulteriore coppia di frenatura.
CAUTELA
In ogni caso è necessario che sul convertitore sia eseguita la cancellazione impulsi prima
che si attivi o disattivi il contattore di cortocircuito dell'indotto. Si evita in questo modo che i
contatti del contattore possano bruciarsi e che il convertitore sia danneggiato.
AVVERTENZA
La frenatura durante il funzionamento normale deve essere sempre effettuata mediante
l'ingresso del valore di riferimento. Per ulteriori informazioni consultare il manuale di
progettazione del convertitore.
Tramite il cortocircuito dell'indotto con una resistenza esterna adattata è possibile ottimizzare
la coppia di frenatura del servomotore nel funzionamento come generatore.
Possibile indirizzo di riferimento: http://www.frizlen.com
Nota
Naturalmente si possono utilizzare anche prodotti equivalenti di altri fornitori. Le ditte
menzionate sopra non sono in alcun modo imposte, ma solo consigliate. Siemens non si
assume alcuna responsabilità per la qualità dei prodotti di terze parti.
190
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Componenti del motore
5.3 Resistenze di frenatura (funzione di frenatura mediante cortocircuito dell'armatura)
5EU
6,1$0,&6
8 9 :
0
a
Figura 5-8
Circuito (principio) con resistenze di frenatura
Indirizzo di ordinazione
Frizlen GmbH & Co. KG
Gottlieb-Daimler-Str. 61, D-71711 Murr
Germania
Telefono:
+49 (0) 7144 / 8100 - 0
Telefax:
+40 (0) 7144 / 2076 - 30
E-mail:
[email protected]
Internet:
www.frizlen.com
Nota
Siemens non si assume alcuna responsabilità per la qualità dei prodotti di terze parti.
Potenza nominale
La potenza costruttiva delle resistenze deve essere compatibile con la relativa caricabilità I2t.
La potenza costruttiva delle resistenze deve essere dimensionata in modo tale che si possa
raggiungere in breve tempo (max. 500 ms) una temperatura superficiale di 300 °C. Per
evitare che la resistenza venga danneggiata, è ammessa una operazione di frenatura dalla
velocità nominale al max. ogni 2 minuti. Altri cicli di frenatura vanno indicati al momento
dell'ordinazione. Determinante per il calcolo sono il momento d'inerzia esterno e il momento
d'inerzia proprio.
Per la determinazione della potenza nominale è necessario indicare l'energia cinetica al
momento dell'ordinazione.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
191
Componenti del motore
5.3 Resistenze di frenatura (funzione di frenatura mediante cortocircuito dell'armatura)
:
˶
- ˶
ವ ವ
:
-
˶
Q
ವ˭
ವ ವ Q
HQHUJLDFLQHWLFD>:V@
PRPHQWRGLLQHU]LD>NJP@
YHORFLW¢DQJRODUH>V@
QXPHURGLJLUL>PLQ@
Calcolo del tempo di frenatura
W% WHPSRGLIUHQDWXUD>V@
7HPSRGLIUHQDWXUD W%
-WRWವQ
ವ0%
Q YHORFLW¢GLIXQ]LRQDPHQWR>JLULPLQ@
0% FRSSLDGLIUHQDWXUDPHGLD>1P@
-WRW PRPHQWRG
LQHU]LD>NJP@
0RPHQWRG
LQHU]LD -WRW -PRW-HVW
-PRW PRPHQWRG
LQHU]LDPRWRUH>NJP@
-HVW PRPHQWRG
LQHU]LDHVWHUQR>NJP@
ATTENZIONE
Per la determinazione del percorso di fuga vanno considerati ad es. l'attrito (in MB come
fattore di maggiorazione) degli elementi di trasmissione meccanica e i tempi di ritardo di
commutazione dei contattori. Per evitare danni meccanici è necessario predisporre degli
ammortizzatori all'estremità del campo di movimento assoluto degli assi macchina.
192
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Componenti del motore
5.3 Resistenze di frenatura (funzione di frenatura mediante cortocircuito dell'armatura)
6HQ]DUHVLVWHQ]DGLIUHQDWXUDHVWHUQD
&RQUHVLVWHQ]DGLIUHQDWXUDHVWHUQD
0EU
0EU
0EURWW
0EUHII
0EUHII
0EURWW
Q1
Q1
9HORFLW¢Q
,EU
,EU
,EUHII
,EUHII
Q1
Q1
9HORFLW¢Q
9HORFLW¢Q
Q1
7HPSRGLDUUHVWRW
5.3.2
9HORFLW¢Q
9HORFLW¢Q
Q1
Figura 5-9
9HORFLW¢Q
7HPSRGLDUUHVWRW
Frenatura mediante cortocircuito dell'indotto
Dimensionamento delle resistenze di frenatura
Con il loro dimensionamento si ottiene un tempo di frenatura ottimale. Nelle tabelle sono
riportate anche le relative coppie di frenatura risultanti. I dati valgono per le frenature dal
numero di giri nominale. Se il motore viene frenato partendo da un altro numero di giri, il
tempo di frenatura non può essere ricavato proporzionalmente al caso precedente. Possono
verificarsi tuttavia tempi di frenatura superiori se il numero di giri in frenatura è inferiore al
numero di giri nominale.
I dati riportati nelle seguenti tabelle sono calcolati per i valori nominali indicati nei dati tecnici.
La tolleranza dovuta alla fabbricazione e la saturazione del ferro non sono state prese in
considerazione. A causa della saturazione si possono riscontrare correnti e coppie più
elevate di quelle calcolate.
La potenza costruttiva delle resistenze deve essere compatibile con la relativa caricabilità I2t.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
193
Componenti del motore
5.3 Resistenze di frenatura (funzione di frenatura mediante cortocircuito dell'armatura)
Frenatura dinamica
Tabella 5- 15 Frenatura dinamica 1FW3, AH 150
Tipo di motore
1FW3150-1⃞H
Resistenza
di frenatura
esterna
Ropt [Ω]
11
Coppia di frenatura media
Mfr eff [Nm]
senza
resistenza di
frenatura
esterna
con resistenza
di frenatura
esterna
22
32
Coppia di
frenatura
max.
Mbr max [Nm]
40
Corrente di frenatura effettiva
Ifr eff [A]
senza
resistenza di
frenatura
esterna
con resistenza
di frenatura
esterna
5
5
1FW3150-1⃞L
8,3
18
34
43
7
8
1FW3150-1⃞P
5,5
15
35
44
13
12
1FW3152-1⃞H
5
46
75
93
12
11
1FW3152-1⃞L
3,7
38
80
99
20
18
1FW3152-1⃞P
2,4
32
85
105
32
29
1FW3154-1⃞H
3,3
73
122
151
19
17
1FW3154-1⃞L
2,4
60
129
161
32
28
1FW3154-1⃞P
1,6
50
137
170
51
45
1FW3155-1⃞H
2,3
96
164
204
27
24
1FW3155-1⃞L
1,7
77
173
215
43
39
1FW3155-1⃞P
1,1
66
188
234
71
63
1FW3156-1⃞H
2
119
207
257
33
29
1FW3156-1⃞L
1,4
96
217
270
54
48
1FW3156-1⃞P
0,97
84
238
295
85
76
194
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Componenti del motore
5.3 Resistenze di frenatura (funzione di frenatura mediante cortocircuito dell'armatura)
Tabella 5- 16 Frenatura dinamica 1FW3, AH 200
Tipo di motore
Resistenza
di frenatura
esterna
Ropt [Ω]
Coppia di frenatura media
Mfr eff [Nm]
senza
resistenza di
frenatura
esterna
con resistenza
di frenatura
esterna
Coppia di
frenatura
max.
Mbr max [Nm]
Corrente di frenatura effettiva
Ifr eff [A]
senza
resistenza di
frenatura
esterna
con resistenza
di frenatura
esterna
1FW3201-1⃞E
3,9
86
116
144
11
10
1FW3201-1⃞H
2,8
64
122
152
22
19
1FW3201-1⃞L
2
45
118
146
34
30
1FW3202-1⃞E
2,5
132
195
242
19
17
1FW3202-1⃞H
1,8
93
204
253
36
32
1FW3202-1⃞L
1,3
68
203
252
57
50
1FW3203-1⃞E
1,8
185
280
348
27
24
1FW3203-1⃞H
1,1
133
302
375
56
50
1FW3203-1⃞L
0,82
92
290
361
84
75
1FW3204-1⃞E
1,4
250
393
489
37
33
1FW3204-1⃞H
0,9
175
412
512
72
65
1FW3204-1⃞L
0,63
125
418
519
115
103
1FW3206-1⃞E
0,86
342
554
688
56
51
1FW3206-1⃞H
0,59
234
578
718
106
95
1FW3206-1⃞L
0,42
176
598
744
170
152
1FW3208-1⃞E
0,68
462
755
938
74
67
1FW3208-1⃞H
0,45
316
793
985
143
128
1FW3208-1⃞L
0,35
206
700
870
199
179
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
195
Componenti del motore
5.3 Resistenze di frenatura (funzione di frenatura mediante cortocircuito dell'armatura)
Tabella 5- 17 Frenatura dinamica 1FW3, AH 280
Tipo di motore
1FW3281-2⃞E
Resistenza
di frenatura
esterna
Ropt [Ω]
0,63
Coppia di frenatura media
Mbr eff [Nm]
senza
resistenza di
frenatura
esterna
con resistenza
di frenatura
esterna
853
1227
Coppia di
frenatura max.
Mbr max [Nm]
1525
Corrente di frenatura effettiva
Ibr eff [A]
senza
resistenza di
frenatura
esterna
con resistenza
di frenatura
esterna
94
85
1FW3281-2⃞G
0,5
653
1238
1539
149
133
1FW3283-2⃞E
0,47
1132
1728
2147
132
119
1FW3283-2⃞G
0,38
824
1701
2114
203
182
1FW3285-2⃞E
0,36
1534
2473
3073
185
166
1FW3285-2⃞G
0,28
1130
2466
3065
285
256
1FW3287-2⃞E
0,25
2017
3413
4242
261
235
1FW3287-2⃞G
0,19
1474
3401
4228
406
366
1FW3281-3⃞J
0,36
480
1230
1528
231
207
1FW3281-3⃞M
0,26
362
1224
1521
335
301
1FW3283-3⃞J
0,25
585
1661
2065
352
290
1FW3283-3⃞M
0,21
428
1632
2028
439
392
1FW3285-3⃞J
0,19
757
2334
2901
439
394
1FW3285-5⃞M
0,15
696
2627
3264
659
588
1FW3287-3⃞J
0,13
1226
3671
4563
659
593
1FW3287-3⃞M
0,089
981
3808
4732
1025
917
196
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
6
Tecnica di collegamento
6.1
Periferia di azionamento SINAMICS
'5,9(&/L4
)URPOHIWWRULJKW
2SWLRQ%RDUGV
0RWRUVZLWK
'5,9(&/L4
LQWHUIDFH
027,21&211(&7SRZHUFDEOH
027,21&211(&7VLJQDOFDEOH
'5,9(&/L4
'5,9(&/L4027,21&211(&7
Figura 6-1
&RQWURO8QLW
6PDUW/LQHRGHU$FWLYH/LQH0RGXOH
'RXEOH0RWRU0RGXOH
6LQJOH0RWRU0RGXOH
6HQVRU
0RGXOH
*B30B(1BD
7HUPLQDO0RGXOHV
0RWRUVZLWKRXW
'5,9(&/L4
LQWHUIDFH
Panoramica del sistema SINAMICS S120
AVVERTENZA
Prima di iniziare qualsiasi lavoro sul motore accertarsi che questo sia disinserito e protetto
contro il riavviamento!
I motori non sono adatti al collegamento diretto alla rete.
I motori Torque completi possono funzionare nell'azionamento a 4 quadranti. Possono
essere collegati a un alimentatore regolato o non regolato.
Nota
La taratura originale degli encoder è realizzata per i convertitori SIEMENS. Per far
funzionare il motore con un convertitore di terze parti può essere necessario modificare la
taratura dell'encoder.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
197
Tecnica di collegamento
6.2 Collegamento di potenza
6.2
Collegamento di potenza
CAUTELA
Rispettare il fabbisogno di corrente del motore della propria applicazione! Misurare i cavi di
collegamento in modo adeguato, in conformità alla IEC 60204-1.
0RWRUH
Figura 6-2
&DSLFRUGDVHFRQGR',1b
8
/
9
/
:
/
Cavo di potenza
Collegamento della morsettiera
La definizione del tipo della morsettiera montata e i dettagli per il collegamento di potenza
dei cavi di rete si possono ricavare dalla tabella "Sezioni dei cavi (Cu) e diametro esterno dei
cavi di collegamento nell'esecuzione standard". Lo schema elettrico per il collegamento
dell'avvolgimento del motore viene fornito con la morsettiera.
0RUVHWWLHUD
8 9 :
0RWRUH
8
9
:
&ROOHJDPHQWRDVWHOODWHQVLRQHGLFROOHJDPHQWR99
Figura 6-3
198
Schema elettrico
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Tecnica di collegamento
6.2 Collegamento di potenza
*.
*.
*.
:
8
8
9
8
:
9
9
:
;%
;%
8
9
9
8
:
:
Figura 6-4
Assegnazione dei morsetti nella morsettiera
Tabella 6- 1
Descrizione della figura "Assegnazione dei morsetti nella morsettiera"
N.
Descrizione
N.
1
Bullone di collegamento M5
6
Sbarra di connessione 3 x M12
2
Bullone di collegamento M10
7
Vite di terra M12 max. 120 mm 2
3
Vite di terra M4
8
Bullone di collegamento M16
4
Vite di terra M6
9
Bullone di terra M16
5
Bullone di terra M10
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Descrizione
199
Tecnica di collegamento
6.2 Collegamento di potenza
Tabella 6- 2
Sezioni dei cavi (Cu) e diametro esterno dei cavi di collegamento in esecuzione standard
Altezza d'asse
Corrente
nominale
IN
Tipo di
morsettiera
Bulloni di
collegame
nto
Filetto per
passaggio cavo
Sezione max.
di collegamento
Diametro
cavo
Altezza d'asse
150 - 200
IN ≤ 50 A
GK 230
∅ 5 mm
2 x M32 x 1,5
2 x 16 mm2
11 ... 24 mm
50 A < IN 105 ≤ A
GK 420
∅ 10 mm
2 x M40 x 1,5
2 x 35 mm2
19 ... 31 mm
2 x M50 x 1,5
mm2
27 ... 38 mm
mm2
41 ... 56 mm
41 ... 56 mm
105 A < IN 260 ≤ A
Altezza d'asse
280
GK 630
∅ 10 mm
2 x 50
IN ≤ 450 A
1XB7700
∅ 12 mm
3 x M75 x 1,5
3 x 120
450 A < IN ≤ 800 A
1XB7712
∅ 16 mm
4 x M75 x 1,5
4 x 120 mm2
Nota
I cavi MOTION-CONNECT 500 e MOTION-CONNECT 800 sono disponibili nell'esecuzione
UL fino ad una sezione di 4 x 185 mm2.
200
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Tecnica di collegamento
6.3 Collegamento del segnale
6.3
Collegamento del segnale
È preferibile collegare i sistemi encoder al SINAMICS tramite DRIVE-CLiQ.
A tale scopo sono disponibili i motori con interfaccia DRIVE-CLiQ. I motori con interfaccia
DRIVE-CLiQ devono essere collegati direttamente al relativo Motor Module tramite i cavi
MOTION-CONNECT DRIVE-CLiQ disponibili. Il collegamento del cavo MOTION-CONNECT
DRIVE-CLiQ viene eseguito sul motore con grado di protezione IP67. L'interfaccia DRIVECLiQ alimenta il trasduttore motore tramite l'alimentatore integrato CC 24 V e trasmette
direttamente alla Control Unit i segnali del trasduttore motore e della temperatura, nonché i
dati elettronici di targa, ad es. il numero di identificazione e i dati nominali (tensione,
corrente, coppia) univoci. Per i diversi tipi di trasduttore il cablaggio viene solitamente
effettuato tramite il cavo MOTION-CONNECT DRIVE-CLiQ. Questi motori semplificano la
messa in servizio e la diagnostica essendo possibile l'identificazione automatica del tipo di
motore e del trasduttore.
Motori con DRIVE-CLiQ
I motori con DRIVE-CLiQ possono essere collegati direttamente al relativo Module del
motore attraverso i cavi MOTION-CONNECT DRIVE-CLiQ disponibili. In questo modo i dati
vengono trasmessi direttamente alla Control Unit.
'5,9(&/L4
(
0RWRU
0RGXOH
0
a
˽
&DYRGLSRWHQ]D
6,1$0,&66
4XDGURGLFRPDQGR
0RWRUH
Figura 6-5
Collegamento del trasduttore con DRIVE-CLiQ
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
201
Tecnica di collegamento
6.3 Collegamento del segnale
Motori senza DRIVE-CLiQ
Per i motori senza interfaccia DRIVE-CLiQ, l'encoder di velocità e il sensore di temperatura
vengono collegati tramite un connettore del segnale.
Per poter funzionare con un SINAMICS S120 i motori privi di interfaccia DRIVE-CLiQ
richiedono un Sensor Module Cabinet-mounted (SMC) o un Sensor Module esterno (SME).
Il motore viene collegato tramite il cavo di segnale all'SMC o all'SME. L'SMC o SME
collegato al Motor Module tramite un cavo MOTION-CONNECT DRIVE-CLiQ.
&DYRSHUVHJQDOL
'5,9(&/L4
(
0RWRU
0RGXOH
6HQVRU0RGXOH&DELQHW60&
0
a
˽
&DYRGLSRWHQ]D
6,1$0,&66
4XDGURGLFRPDQGR
0RWRUH
6HQVRU0RGXOHH[WHUQ60(
&DYRSHUVHJQDOL
'5,9(&/L4
(
0RWRU
0RGXOH
0
a
˽
&DYRGLSRWHQ]D
6,1$0,&66
4XDGURGLFRPDQGR
0RWRUH
Figura 6-6
202
Collegamento del trasduttore senza DRIVE-CLiQ
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Tecnica di collegamento
6.4 Capacità torsionale dei connettori sul motore
6.4
Capacità torsionale dei connettori sul motore
La possibilità di torsione del connettore di segnale e di DRIVE-CLiQ è limitata.
ATTENZIONE
Rispettare quanto segue per la torsione dei connettori
• L'area di rotazione consentita non deve essere superata.
• Al fine di garantire il grado di protezione sono consentite max. 10 torsioni.
• Non superare le coppie di torsione massime indicate nella tabella "Coppie di torsione".
• La torsione va eseguita con un controconnettore adatto alla filettatura del connettore.
• I cavi di collegamento vanno assicurati per evitarne la trazione e la piegatura.
• I connettori motore vanno bloccati per evitarne l'ulteriore torsione.
• Non sono consentite forze continue sui connettori.
Tabella 6- 3
Coppie di torsione massime presenti
Connettore
Max. coppia di torsione presenti [Nm]
Connettore dei segnali
8
DRIVE-CLiQ (connettore)
8
Cavo di segnale
Il connettore per il cavo di segnale (sulla scatola dell'encoder) è montato dal costruttore. Nel
collegare il connettore si deve allineare la tacca di codifica presente nel connettore femmina
e quindi serrare a mano il dado fino all'arresto.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
203
Tecnica di collegamento
6.5 Avvertenze per il collegamento
6.5
Avvertenze per il collegamento
I cavi preconfezionati, rispetto ai cavi confezionati in proprio, offrono molti vantaggi. Oltre alla
garanzia di perfetto funzionamento e all'elevata qualità, essi risultano essere vantaggiosi
anche per quanto riguarda i costi.
Utilizzare cavi di potenza e di segnale della famiglia MOTION-CONNECT. Rispettare le
lunghezze massime dei cavi. Per i dati tecnici e per il tipo di cavi consultare il catalogo al
Capitolo "Tecnica di collegamento MOTION-CONNECT"
Instradamento dei cavi
● I cavi dei motori devono essere a conduttori intrecciati o cavi a tre conduttori con
conduttore di terra in aggiunta. Le terminazioni dei conduttori devono essere spellate in
modo tale che l'isolamento residuo sia bastante per il capocorda o il morsetto.
● I cavi di collegamento devono essere disposti nella morsettiera in modo tale che il
conduttore di terra abbia una lunghezza adeguata e l'isolamento dei conduttori non venga
danneggiato. Provvedere allo scarico di tiro dei cavi di collegamento.
● Le estremità del cavo vanno spelate solo in modo da far sì che l'isolamento basti fino al
capocorda, al morsetto o al puntalino.
● Le dimensioni dei capicorda devono essere adeguate a quelle dei morsetti e alla sezione
del cavo di rete.
● Devono essere utilizzati cavi di potenza e di segnale schermati.
● Le lunghezze eccessive dei conduttori devono essere evitate.
● I cavi di collegamento devono essere dotati di scarico di attorcigliamento, tiro e spinta
nonché di protezione antipiegatura. Non sono consentite forze continue sui cavi.
● Prestare attenzione affinché vengano rispettate le distanze in aria minime richieste:
Tabella 6- 4
Distanza in aria minima
Max. tensione sui morsetti
< 600 V
< 1000 V
Distanza in aria minima
5,5 mm
8 mm
● I collegamenti elettrici mediante viti devono essere realizzati con le coppie di serraggio
prescritte:
Tabella 6- 5
Coppie di serraggio
Ø filetto
Coppia di
serraggio (Nm)
M4
M5
M6
M8
M10
M12
M16
0,8 ... 1,2
1,8 ... 2,5
2,7 ... 4
5,5 ... 8
9 ... 13
14 ... 20
27 ... 40
Nota
Per evitare interferenze (ad es. legate alla compatibilità elettromagnetica), i cavi di segnale
devono essere posati separatamente dai cavi di potenza.
204
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Tecnica di collegamento
6.5 Avvertenze per il collegamento
Collegamento equipotenziale interno (per 1FW315⃞ e 1FW320⃞)
Il collegamento equipotenziale tra il morsetto di terra nella custodia della morsettiera e la
struttura del motore si effettua con le viti di fissaggio della morsettiera. I punti di contatto
sotto le teste delle viti devono essere sverniciati e protetti contro la corrosione.
Per la compensazione di potenziale tra il coperchio e la carcassa della morsettiera sono
sufficienti le normali viti di fissaggio del coperchio.
Conduttore di protezione o conduttore equipotenziale esterno (con 1FW328⃞)
Nota
Con altezza d'asse 1FW328⃞, per il collegamento di un conduttore di protezione o di un
conduttore equipotenziale esterno è disponibile un ulteriore punto di collegamento sulla
struttura.
(Non richiesto con altezza d'asse 1FW315⃞ e 1FW320⃞.)
Collegare il conduttore di terra
La sezione del cavo di terra deve essere conforme alle prescrizioni, es. secondo le IEC/EN
60204-1.
Con AH 280 il conduttore di terra deve essere inoltre collegato alla struttura del motore. Sul
punto di collegamento indicato per il conduttore di terra si trova a tal fine un foro filettato,
adatto per il collegamento di conduttori multifilo con capicorda o di cavi piatti con corrette
terminazioni.
Per il collegamento occorre accertarsi che
● la superficie di contatto non sia isolata e sia protetta da un'idonea sostanza anticorrosiva,
ad es. vaselina neutra,
● sotto la testa della vite siano disposte la rondella elastica e la rosetta,
● siano rispettati sia la profondità minima di avvitamento necessaria sia la coppia di
serraggio della vite (vedere la tabella)
Tabella 6- 6
Profondità di avvitamento e coppia di serraggio
Vite
Profondità di avvitamento
minima
Coppia di serraggio
M10 x 30
15 mm
28 - 42 Nm
Terminato il collegamento occorre controllare/verificare
● L'interno della morsettiera deve essere pulito e privo di resti di cavi
● Tutte le viti di bloccaggio devono essere avvitate a fondo
● Devono essere rispettate le distanze minime per la circolazione dell'aria
● Gli ingressi dei cavi devono essere protetti con guarnizioni in modo sicuro
● Gli ingressi non utilizzati devono essere tappati e gli elementi di chiusura avvitati a fondo
● Tutte le superfici di isolamento devono essere correttamente preparate
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
205
Tecnica di collegamento
6.5 Avvertenze per il collegamento
Capacità di carico di corrente dei cavi di potenza e di segnale
La capacità di carico di corrente dei cavi in rame con isolamento in PVC/PUR è valida per i
tipi di posa B1, B2 e C alle condizioni di funzionamento continuo riportate nella tabella con
una temperatura ambiente dell'aria di 40 °C. Per altre temperature ambiente, i valori devono
essere ricavati utilizzando i fattori riportati nella tabella di "Fattori di derating".
Tabella 6- 7
Sezione dei cavi e capacità di carico di corrente
Sezione
Capacità di carico di corrente effettiva AC 50/60 Hz o DC per tipo di posa
[mm2]
B1 [A]
B2 [A]
C [A]
4,3
4,4
Elettronica (secondo EN 60204-1)
0,20
-
0,50
-
7,5
7,5
0,75
-
9
9,5
Potenza (secondo EN 60204-1)
0,75
8,6
8,5
9,8
1,00
10,3
10,1
11,7
1,50
13,5
13,1
15,2
2,50
18,3
17,4
21
4
24
23
28
6
31
30
36
10
44
40
50
16
59
54
66
25
77
70
84
35
96
86
104
50
117
103
125
70
149
130
160
95
180
165
194
120
208
179
225
Potenza (secondo IEC 60364-5-52)
150
-
-
259 1)
185
-
-
296 1)
> 185
I valori si devono desumere dalla norma
1)
206
Valori estrapolati
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Tecnica di collegamento
6.6 Posa dei cavi in ambienti umidi
Tabella 6- 8
6.6
Fattori di derating per i cavi di potenza e di segnale
Temperatura ambiente dell'aria [°C]
Fattore di derating secondo EN 60204-1, tabella D1
30
1,15
35
1,08
40
1,00
45
0,91
50
0,82
55
0,71
60
0,58
Posa dei cavi in ambienti umidi
ATTENZIONE
ULFKWLJ
Figura 6-7
SHUPLWWHG
6,(0(16
6,(0(16
QLFKWHUODXEW
6,(0(16
6,(0(16
6,(0(16
6,(0(16
Se il motore è installato in un ambiente umido, i cavi di potenza e di segnale devono essere
disposti come nella figura seguente.
QRWSHUPLWWHG
Schema di posa dei cavi in ambienti umidi
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
207
Tecnica di collegamento
6.6 Posa dei cavi in ambienti umidi
208
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Avvertenze sull'uso dei motori
7.1
7
Volume di fornitura
I sistemi di azionamento sono assemblati in modo individuale secondo le esigenze del
cliente. Verificare subito, al ricevimento della macchina, la corrispondenza tra il volume di
fornitura e quanto riportato sui documenti di consegna. SIEMENS non fornisce alcuna
garanzia per danni non denunciati subito.
Presentare reclamo:
● immediatamente al trasportatore per danni dovuti al trasporto
● per difetti evidenti / fornitura incompleta immediatamente presso la filiale Siemens di
competenza.
Le Istruzioni operative sono parte integrante del volume di fornitura e devono essere
conservate con cura e in un luogo accessibile agli addetti. La targhetta dei dati tecnici fornita
a parte (targhetta identificativa) serve per apporre i dati del motore anche sulla macchina o
sull'impianto.
Del volume di fornitura fanno parte:
● il motore (altezze d'asse 1FW315x, 1FW320x o 1FW328x)
● la targhetta dei dati tecnici (targhetta identificativa)
● lo schema circuitale
● le informazioni di sicurezza e il modulo per ordinare le Istruzioni operative
Nota
Il dispositivo di raffreddamento per il circuito chiuso del refrigerante non fa parte della
fornitura.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
209
Avvertenze sull'uso dei motori
7.2 Trasporto
7.2
Trasporto
Per il trasporto e il montaggio è necessario utilizzare appositi dispositivi di sospensione del
carico. Si devono rispettare le normative nazionali.
Se un motore non viene messo immediatamente in servizio dopo la consegna, deve essere
immagazzinato in un locale asciutto, privo di polvere e di vibrazioni; vedere il capitolo
"Immagazzinaggio".
AVVERTENZA
Pericolo durante le operazioni di sollevamento e trasporto!
Un'installazione non corretta, un'apparecchiatura o mezzi di supporto non idonei o difettosi
possono causare lesioni personali e/o danni materiali.
I dispositivi di sollevamento, i carrelli per trasporti interni e i dispositivi di sospensione del
carico devono essere conformi alle prescrizioni. Rispettare la portata massima del
dispositivo di sollevamento. Non applicare carichi supplementari. Per il sollevamento del
motore, soprattutto in presenza di accessori e componenti applicati, è necessario utilizzare
adeguati dispositivi di guida o divaricazione delle funi. Dopo aver posato il motore, occorre
assicurarlo contro il rotolamento laterale.
Il peso del motore è riportato sulla targhetta dei dati tecnici.
CAUTELA
Utilizzare una traversa per sollevare e trasportare i motori tramite i golfari forniti in
dotazione!
Figura 7-1
210
Sollevamento e trasporto con traversa
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Avvertenze sull'uso dei motori
7.3 Immagazzinaggio
Trasporto di un motore già messo in servizio
Procedere come segue se si deve trasportare un motore già messo in servizio:
1. Far raffreddare il motore.
2. Scollegare i raccordi e i connettori sul lato cliente.
3. Svuotare all'occorrenza l'impianto dell'acqua di raffreddamento e pulirlo con un getto
d'aria.
4. Trasportare e sollevare il motore servendosi dei golfari e di una traversa.
7.3
Immagazzinaggio
Immagazzinaggio in locali chiusi
Il periodo di giacenza specificato per i motori non può superare i 2 anni in ambienti interni
asciutti, a temperature comprese tra +5 °C e +40 °C.
● Applicare sulle parti nude esterne un prodotto conservante, ad es. Tectyl, qualora non
fosse già stato applicato in fabbrica.
● Immagazzinare il motore in un ambiente di deposito che soddisfi i seguenti requisiti:
– Deve essere asciutto, privo di polvere, non esposto al gelo ed esente da vibrazioni
(veff < 0,2 mm/s). L'umidità relativa dell'aria deve essere minore del 60 %.
– Deve essere ben ventilato.
– Deve offrire protezione da condizioni atmosferiche estreme.
– L'aria presente nel locale non deve contenere gas aggressivi.
● Il motore deve essere protetto da urti e umidità.
● Coprire bene il motore.
● Evitare la corrosione da contatto. Si raccomanda di ruotare manualmente l'estremità
d'albero ogni 3 mesi.
CAUTELA
Danni di giacenza durante l'immagazzinaggio
Un immagazzinaggio improprio può provocare danni di giacenza, ad es. rigature, per
effetto di vibrazioni o urti.
Immagazzinare il motore dopo l'uso
Se occorre immagazzinare il motore dopo averlo utilizzato, è necessario svuotare
completamente il circuito dell'acqua di raffreddamento servendosi di un getto d'aria.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
211
Avvertenze sull'uso dei motori
7.4 Montaggio
7.4
Montaggio
7.4.1
Avvertenze di pericolo per il montaggio
PERICOLO
I motori Torque sono dotati di magneti ad elevata potenza. Per questo, quando il motore
viene aperto, sono presenti intensi campi magnetici ed elevate forze di attrazione
magnetiche.
I portatori di pace-maker o impianti metallici non devono pertanto eseguire lavori sul motore
aperto.
Tenere lontani orologi e supporti dati magnetizzabili (ad es. floppy disk, carte di credito,
ecc.).
AVVERTENZA
Questo motore è azionato elettricamente. Durante il funzionamento dei motori elettrici
alcune parti si trovano necessariamente sotto tensione pericolosa. Qualsiasi intervento
improprio nell'utilizzo dei motori può quindi causare la morte o gravi lesioni personali o
considerevoli danni materiali.
È perciò indispensabile osservare scrupolosamente tutte le avvertenze di pericolo indicati
in questo capitolo e sullo stesso prodotto.
● Il montaggio e la manutenzione del motore possono essere eseguiti solo da personale
qualificato.
● Per il trasporto si devono utilizzare i golfari forniti insieme al motore.
● Tutte le operazioni sul motore devono essere eseguite sempre senza tensione
nell'impianto
● Il collegamento del motore deve essere conforme allo schema elettrico allegato
● Nella morsettiera del motore occorre prestare attenzione affinché i cavi di collegamento
siano disposti correttamente e isolati rispetto al coperchio della morsettiera.
● Verificare la tenuta delle morsettiere
● L'impiego di cavi con isolamento difettoso o danneggiato non è consentito
● Possono essere utilizzati solo i ricambi omologati dal costruttore
● Deve essere verificato il rispetto delle condizioni nel luogo di montaggio (ad es.
temperature, altitudine di installazione)
● Non è ammesso l'impiego in aree a rischio di esplosione
● La flangia di collegamento deve essere liberata completamente dagli strati di prodotto
anticorrosivo (utilizzare solventi comunemente reperibili in commercio)
● Gli elementi condotti devono essere ruotati a mano. Nel caso di rumori di sfregamento,
eliminare la causa o rivolgersi al produttore.
212
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Avvertenze sull'uso dei motori
7.4 Montaggio
7.4.2
Sommario delle possibilità di montaggio
Di norma i motori Torque vengono utilizzati come azionamenti diretti, ovvero senza riduttori o
cinghie intermedi. La differenza principale nel montaggio del motore tra un comune
azionamento comune e la tecnica di azionamento diretta è visibile nell'immagine seguente.
5LGXWWRUL
0RWRUHFRQYHQ]LRQDOH
0DFFKLQD
GHOFOLHQWH
7HFQLFDGLD]LRQDPHQWR
FRQYHQ]LRQDOHFRQ
PRWRUHFRPSOHWRH
ULGXWWRUL
7HFQLFDGLD]LRQDPHQWR
GLUHWWDFRQPRWRUH
7RUTXH
0DFFKLQD
GHOFOLHQWH
):
Figura 7-2
Confronto tra la tecnica di azionamento convenzionale e diretta
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
213
Avvertenze sull'uso dei motori
7.4 Montaggio
Precauzioni da osservare durante il montaggio
I motori Torque sono realizzati come motori completi con cuscinetti a sfere a gola profonda.
ATTENZIONE
Le forze radiali e assiali massime consentite non devono essere superate.
Non deve verificarsi un disallineamento del cuscinetto causato dal cuscinetto della
macchina montato dal cliente. In caso di disallineamento del cuscinetto si possono
verificare danni immediati dello stesso e l'intervallo per la sostituzione del cuscinetto può
essere sensibilmente ridotto.
0DVFKLQHPDFKLQH
Figura 7-3
214
Disallineamento del cuscinetto di un albero (da evitare)
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Avvertenze sull'uso dei motori
7.4 Montaggio
7.4.3
Esempi di possibilità di montaggio
Soluzione con giunto
Vantaggio: Semplice montaggio, il motore può essere impiegato in esecuzione standard
Svantaggio: In virtù della propria funzione, il giunto deve essere elastico, limitando così le
proprietà positive di una catena di azionamento diretta: riduzione della resistenza nella
catena di azionamento.
0DVFKLQHPDFKLQH
Figura 7-4
Disaccoppiamento dell'albero macchina rispetto all'albero motore mediante giunto
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
215
Avvertenze sull'uso dei motori
7.4 Montaggio
Soluzione con braccio di reazione
Vantaggio: Il braccio di reazione provvede a un collegamento resistente a torsione del
motore in direzione radiale e compensa le tolleranze assiali e i disassamenti.
Soluzione molto positiva per applicazioni con numero di giri o senso di rotazione continui.
Svantaggio: A seconda dell'esecuzione, un braccio di reazione (lasco) può presentare del
gioco in direzione radiale. Per questo si possono verificare limitazioni a livello dinamico ed
errori di posizionamento.
Figura 7-5
216
Disaccoppiamento dello statore rispetto alla piastra della macchina mediante braccio di reazione
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Avvertenze sull'uso dei motori
7.4 Montaggio
7.4.4
Montaggio della struttura del motore
Montaggio della struttura del motore sulla macchina fornita dal cliente
In linea di principio sussistono le seguenti possibilità per il montaggio della struttura del
motore Torque 1FW3 completo sulla macchina fornita dal cliente:
Tabella 7- 1
Montaggio della struttura del motore
Altezza d'asse
Forma costruttiva
Fori sulla flangia della
carcassa sul lato DE
Diametro della
circonferenza primitiva
150
IM B14, IM V18/19
12 x M10
295 mm
200
IM B14, IM V18/19
16 x M10
380 mm
280
IM B35
24 x ∅ 13 mm
532 mm
Collegare il rotore all'albero motore
Il rotore del motore 1FW3 può essere collegato come segue all'albero motore del cliente:
Tabella 7- 2
Collegare il rotore all'albero motore
Altezza d'asse Foro filettato sul rotore lato DE (lato frontale)
Elementi di bloccaggio nel
diametro interno del rotore
150
12 x M12, profondità 24 mm,
∅ circonferenza primitiva 170 mm
Diametro interno 153 mm H7
200
12 x M12, profondità 24 mm,
∅ circonferenza primitiva 170 mm
Diametro interno 153 mm H7
280
24 x M16, profondità 34 mm,
∅ circonferenza primitiva 280 mm
Diametro interno 250 mm H7
ATTENZIONE
Devono essere rispettate le forze di serraggio minime e massime consentite.
Non deve essere superata la pressione superficiale ammessa.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
217
Avvertenze sull'uso dei motori
7.4 Montaggio
7.4.5
Fissaggio e istruzioni di montaggio
I presupposti per un funzionamento silenzioso e senza scosse sono un basamento stabile e
un preciso allineamento del motore.
Si devono rispettare le seguenti istruzioni di montaggio:
● Soprattutto nel caso di motori con rotazione elevata, è indispensabile assicurare la
stabilità di montaggio della flangia in modo da tenere la frequenza intrinseca della flangia
elevata e comunque al di sopra della frequenza max. di rotazione.
● Per l'allineamento del motore si possono disporre sottili lamierini sotto i piedini per evitare
distorsioni del motore. Il numero di spessori utilizzati deve essere il minore possibile.
● Per un fissaggio ed un trasferimento di coppia sicuri, devono essere utilizzate viti con
classe di resistenza 8.8 secondo ISO 898-1.
7.4.6
Frequenze proprie di montaggio
Il motore costituisce un sistema soggetto a vibrazioni con una frequenza propria derivante
dal tipo di costruzione. Essa si trova al di sopra del numero di giri massimo indicato.
Montandolo su una macchina di produzione si realizza un nuovo sistema anch'esso soggetto
a vibrazioni con frequenze proprie modificate. Esse possono trovarsi entro il campo del
numero di giri del motore.
Questo può provocare vibrazioni indesiderate nella catena di azionamento.
ATTENZIONE
L'installazione dei motori dovrà essere molto accurata e la base di appoggio dovrà avere
una sufficiente rigidità. Un'ulteriore elasticità dei piani di appoggio può causare delle
risonanze delle frequenze intrinseche di installazione alla velocità di esercizio e valori non
consentiti per le vibrazioni.
L'altezza della frequenza intrinseca di installazione dipende da diversi fattori e viene
influenzata dalle seguenti condizioni:
● elementi di trasmissione della forza (riduttore, cinghia, giunto, pignone ecc.)
● rigidità della macchina sulla quale è montato il motore
● rigidità del motore in corrispondenza dei piedini o della flangia del cliente
● Massa del motore
● massa della macchina o massa in corrispondenza del motore
● caratteristiche di smorzamento del motore e della macchina di produzione
● tipo di montaggio, posizione di montaggio (IM B14, IM V18/19, IM B35)
● distribuzione della massa del motore, e cioè lunghezza costruttiva, altezza d'asse.
218
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Avvertenze sull'uso dei motori
7.4 Montaggio
7.4.7
Resistenza alle vibrazioni
Le oscillazioni del sistema sul luogo di installazione, dovute agli elementi condotti, alle
condizioni di montaggio, all'allineamento e all'installazione, nonché a vibrazioni provenienti
dall'esterno, possono aumentare i valori di oscillazione sul motore.
In determinate circostanze può rendersi necessaria una completa equilibratura del rotore
con l'elemento condotto.
Per un funzionamento corretto e una lunga durata di vita non si devono superare i valori
indicati per le vibrazioni (norma ISO 10816) sui punti di misura specificati del motore.
Tabella 7- 3
Valori di vibrazione radiali massimi ammessi 1)
Frequenza di oscillazione
Valori di vibrazione
< 6,3 Hz
Ampiezza di oscillazione s ≤ 0,16 mm
6,3 - 250 Hz
Velocità di oscillazione veff ≤ 4,5 mm/s
> 250 Hz
Accelerazione di oscillazione a ≤ 10 m/s2
Tabella 7- 4
Valori di vibrazione assiali massimi ammessi 1)
Velocità di oscillazione
Accelerazione di oscillazione
veff = 4,5 mm/s
apeak = 2,25 m/s2
1)
È necessario rispettare contemporaneamente i due valori
Figura 7-6
Velocità di oscillazione massima ammessa, considerando l'ampiezza di oscillazione e
l'accelerazione di oscillazione
Per valutare la velocità di oscillazione, l'equipaggiamento di misura deve soddisfare i
requisiti della norma ISO 2954. La valutazione dell'accelerazione di oscillazione deve
avvenire come valore di picco su un arco di tempo nella gamma di frequenza da 10 a 2000
Hz.
Se si prevedono fonti di vibrazioni non trascurabili, superiori a 2000 Hz (ad es. frequenze di
ingranamento), è necessario adeguare di conseguenza il campo di misura. I valori massimi
ammessi non variano.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
219
Avvertenze sull'uso dei motori
7.4 Montaggio
7.4.8
Sistemi di bloccaggio
In questo capitolo verranno presentate varie possibilità di montaggio che prevedono l'utilizzo
di elementi di bloccaggio. Si consiglia di impiegare sistemi di bloccaggio della ditta
RINGSPANN GmbH.
I sistemi di bloccaggio non rientrano nel volume di fornitura di Siemens AG.
Per consentire un collegamento sicuro e con aderenza di attrito dei motori Torque su alberi
macchina cilindrici, la Siemens AG in collaborazione con la ditta RINGSPANN GmbH ha
sviluppato diverse soluzioni per sistemi di bloccaggio con i seguenti obiettivi:
● trasmissione sicura della coppia
● centratura precisa del motore Torque sull'albero della macchina
● assenza di deformazioni non consentite sui componenti del motore Torque
● assenza di distorsioni dovute a variazioni di temperatura nel motore Torque e nell'albero
macchina
● montaggio semplice
● smontaggio agevole, anche dopo un lungo impiego in esercizio
Queste soluzioni per sistemi di bloccaggio della ditta RINGSPANN sono disponibili come:
Sistema a serraggio esterno
RTM 607
Sistema a serraggio interno
RTM 134.1
Assistenza tecnica della ditta RINGSPANN GmbH
La ditta RINGSPANN GmbH fornisce assistenza durante la scelta del sistema di bloccaggio
più adatto alla propria applicazione.
RINGSPANN GmbH
Telefono: +49 (0) 6172 275
Schaberberg 30-34
Internet: http://www.ringspann.de
D-61348 Bad Homburg
220
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Avvertenze sull'uso dei motori
7.4 Montaggio
7.4.8.1
Sistemi a serraggio esterno per il serraggio di alberi macchina
1FW315x-xxxxx-xxAx
1FW320x-xxxxx-xxAx
● Sistema di serraggio adattato RINGSPANN RTM 607
● Per alberi cavi attraverso i quali vengono condotti liquidi caldi o freddi
● Per alberi pieni
● Combinabile con montaggio coassiale dell'encoder
● Spazio di montaggio assiale necessario sul lato DE
● Montaggio esclusivamente dal lato DE o in alternativa possibile in due pezzi da DE/NDE
● Trasmissione della coppia sull'albero cliente (accoppiamento h8) tramite elemento di
serraggio flangiato su DE
● Supporto su NDE tramite anello in alluminio per garantire il montaggio centrato e
impedire movimenti basculanti non consentiti.
Figura 7-7
Sistema a serraggio esterno
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
221
Avvertenze sull'uso dei motori
7.4 Montaggio
7.4.8.2
Sistemi a serraggio interno per il serraggio di alberi macchina
1FW315x-xxxxx-xxCx
1FW320x-xxxxx-xxCx
● Disponibile per 1FW315x e 1FW320x con albero speciale (15ª posizione del codice di
ordinazione = C)
● RINGSPANN RTM 134.1
● Trasmissione della coppia sull'albero cliente (accoppiamento h8) tramite elemento di
serraggio NDE presente nell'albero cavo
● Supporto su DE tramite anello in alluminio per garantire il montaggio centrato e impedire
movimenti basculanti non consentiti
● Possibilità di montaggio compatto sulla macchina dato che non è necessario uno spazio
di montaggio su DE e che il montaggio avviene interamente da NDE
● Nessuna combinazione possibile con montaggio coassiale dell'encoder
):ಹ):
):ಹ):
):ಹ):
):ಹ):
8QJUXSSRGLVHUUDJJLRªVXIILFLHQWH
Figura 7-8
222
'XHJUXSSLGLVHUUDJJLRVRQRQHFHVVDUL
SHUODWUDVPLVVLRQHGHOODFRSSLD
Gruppi di serraggio necessari per la trasmissione della coppia
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Avvertenze sull'uso dei motori
7.4 Montaggio
Figura 7-9
Sistema a serraggio interno
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
223
Avvertenze sull'uso dei motori
7.4 Montaggio
7.4.8.3
Soluzione con variante senza cuscinetto DE
1FW3xxx-xxxxx-xxx3
Caratteristiche
● Montaggio rigido di rotore e statore
● Pochi componenti di montaggio necessari
● Possibilità di montaggio per moduli cuscinetto per l'assorbimento di forze di processo
elevate
ATTENZIONE
• Il disallineamento radiale del cuscinetto restante su NDE deve essere evitato;
dimostrazione necessaria mediante calcolo
• La dilatazione termica assiale dell'albero macchina deve essere limitata
• Le condizioni di montaggio devono essere rispettate, vedere il disegno quotato n.
609.30284.01, senza cuscinetto DE
In caso di quesiti sulle condizioni marginali, rivolgersi al Siemens Service Center.
Esempi di montaggio
5LFKLHGHO
DFFRUGRHYGLVDOOLQHDPHQWR
Figura 7-10
224
3HUPRGXORFXVFLQHWWRFRQVROOHFLWD]LRQHUDGLDOHDVVLDOH
Esempi di montaggio della soluzione senza cuscinetto DE
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Avvertenze sull'uso dei motori
7.5 Messa in servizio
7.5
Messa in servizio
7.5.1
Provvedimenti prima della messa in servizio
Prima di mettere in servizio l'impianto, controllare che lo stesso sia correttamente montato e
collegato. Il sistema di azionamento deve essere messo in servizio attenendosi alle istruzioni
operative del convertitore o dell'invertitore.
Nota
L'elenco che segue potrebbe essere incompleto. A seconda delle condizioni specifiche
dell'impianto potrebbero rivelarsi necessarie ulteriori verifiche.
PERICOLO
Pericolo di scossa elettrica!
Durante la messa in servizio/il funzionamento del motore elettrico, alcune parti si trovano
necessariamente sotto tensione pericolosa. Qualsiasi intervento improprio nell'utilizzo dei
motori può causare la morte o gravi lesioni personali o danni materiali. Rispettare le
avvertenze riportate sul prodotto!
CAUTELA
Pericolo termico dovuto a superficie calda!
La temperatura superficiale dei motori può superare i 100 °C.
Non toccare le superfici calde!
Prevedere eventualmente una protezione contro i contatti!
I componenti sensibili alla temperatura (conduttori elettrici, componenti elettronici) non
devono aderire a superfici surriscaldate.
Il surriscaldamento può provocare la distruzione degli avvolgimenti e dei cuscinetti, oltre
alla smagnetizzazione dei magneti permanenti.
I motori devono essere fatti funzionare solo con un efficace dispositivo di controllo della
temperatura!
AVVERTENZA
Pericolo durante il funzionamento del rotore!
Assicurare le misure di protezione adeguate contro il contatto accidentale degli elementi
condotti.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
225
Avvertenze sull'uso dei motori
7.5 Messa in servizio
Collegamento meccanico
● Sono stati adottati tutti i provvedimenti per la protezione contro contatti accidentali per le
parti in movimento e sotto tensione.
● Il motore è installato e allineato correttamente.
● Il rotore può ruotare di un giro completo senza attrito o strisciamento.
● Le condizioni di esercizio concordano con i dati previsti riportati sulle targhette.
● Tutte le viti di fissaggio e gli elementi di connessione sono serrati adeguatamente; i
collegamenti elettrici sono eseguiti correttamente.
● Verificare l'idoneità e l'installazione degli elementi condotti per le condizioni di impiego
previste.
Collegamento elettrico
● L'interno della morsettiera deve essere pulito e privo di resti di cavi.
● Tutte le viti dei morsetti devono essere avvitate a fondo.
● Devono essere rispettate le distanze minime per la circolazione dell'aria.
● Gli ingressi dei cavi devono essere protetti con guarnizioni in modo sicuro.
● Gli ingressi non utilizzati devono essere tappati e gli elementi di chiusura avvitati a fondo.
● Tutte le superfici di tenuta devono essere realizzate correttamente.
Dispositivi di sorveglianza
● Tramite il comando sovraordinato e il monitoraggio di velocità deve essere garantito che
non sia possibile far ruotare il motore ad una velocità superiore a quella prevista dai dati
riportati sulla targhetta.
● Gli eventuali dispositivi aggiuntivi per la sorveglianza del motore sono collegati
correttamente e funzionanti.
Raffreddamento ad acqua
Nel caso di raffreddamento ad acqua, l'alimentazione idrica deve essere allacciata e
operativa. La circolazione dell'acqua di raffreddamento deve essere regolare (portata,
temperatura).
Cuscinetti volventi
Se il motore è rimasto immagazzinato in condizioni adeguate per oltre 3 anni, ovvero in un
ambiente privo di polvere, asciutto ed esente da vibrazioni, è necessario sostituire i
cuscinetti.
226
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Avvertenze sull'uso dei motori
7.5 Messa in servizio
7.5.2
Esecuzione del ciclo di prova
AVVERTENZA
Pericolo di ustioni dovute al vapore nei motori con raffreddamento ad acqua
Se si interrompe l'alimentazione dell'acqua di raffreddamento, il motore si surriscalda.
Quando l'acqua penetra nel motore, si sviluppa improvvisamente vapore che fuoriesce ad
alta pressione. Il sistema di raffreddamento può esplodere. Ne possono conseguire la
morte, lesioni gravi e danni materiali.
Collegare l'alimentazione dell'acqua solo quando la macchina si è raffreddata.
AVVERTENZA
Pericolo durante il funzionamento del rotore!
Assicurare le misure di protezione adeguate contro il contatto accidentale degli elementi
condotti. Fissare saldamente le chiavette eventualmente presenti per evitarne l'espulsione.
7.5.3
Verifica della resistenza di isolamento
Dopo lunghi periodi di fermo o di immagazzinamento la resistenza d'isolamento degli
avvolgimenti verso massa deve essere misurata con tensione continua.
AVVERTENZA
Gli interventi sugli impianti ad alta tensione devono essere eseguiti esclusivamente da
personale specializzato. Osservare le istruzioni per l'uso dello strumento di misura utilizzato
prima di iniziare la misura della resistenza di isolamento.
AVVERTENZA
Tensione pericolosa
Durante e subito dopo la misurazione i morsetti presentano tensioni parzialmente
pericolose. Il contatto con parti sotto tensione può provocare la morte e lesioni gravi.
Non toccare i morsetti durante o subito dopo la misurazione.
Se sono presenti cavi di rete collegati, assicurarsi che non possa essere applicata alcuna
tensione.
La resistenza di isolamento dell'avvolgimento rispetto alla carcassa della macchina deve
essere misurata in linea di principio solo con una temperatura dell'avvolgimento di
20 ... 30 °C.
Durante la misurazione occorre attendere che venga raggiunto il valore finale della
resistenza; l'attesa dura circa un minuto.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
227
Avvertenze sull'uso dei motori
7.5 Messa in servizio
Valori limite
La seguente tabella indica la tensione di misura nonché i valori limite per la resistenza
d'isolamento minima e la resistenza d'isolamento critica con una tensione nominale UN della
macchina di UN < 2 kV.
Tabella 7- 5
Resistenza di isolamento dell'avvolgimento statorico a 25 °C
Tensione nominale UN < 2 kV
Tensione misurata
500 V (minimo 100 V)
Resistenza di isolamento minima nel caso di avvolgimento nuovo, 10 MΩ
pulito o riparato
Resistenza di isolamento specifica critica dopo lunghi periodi di
funzionamento
5 MΩ/kV
Tenere presente quanto segue:
● Avvolgimenti nuovi e asciutti presentano resistenze d'isolamento comprese tra 100 e
2000 MΩ o eventualmente anche valori superiori.
Se il valore della resistenza di isolamento è prossimo al minimo, ciò può essere dovuto a
umidità e/o a sporcizia.
● Durante il funzionamento la resistenza di isolamento dell'avvolgimento può abbassarsi a
causa di fattori ambientali o legati al funzionamento. Il valore critico della resistenza
d'isolamento con una temperatura dell'avvolgimento di 25 °C deve essere calcolato in
funzione della tensione nominale, moltiplicando la tensione nominale (kV) per il valore
critico specifico della resistenza (5 MΩ / kV).
Esempio: resistenza critica per tensione nominale (UN) 500 V:
500 V x 5 MΩ/kV = 2,5 MΩ
ATTENZIONE
Al raggiungimento della resistenza d'isolamento critica, pulire e/o asciugare gli
avvolgimenti
Se si raggiunge o si supera in negativo la resistenza critica di isolamento, gli
avvolgimenti devono essere asciugati oppure, a rotore smontato, puliti e asciugati
scrupolosamente.
Dopo l'asciugatura di avvolgimenti puliti, tenere presente che la resistenza d'isolamento,
ad avvolgimento caldo, è più bassa. La resistenza d'isolamento può essere valutata
correttamente solo misurando un avvolgimento a temperatura ambiente (circa
20 ... 30 °C).
ATTENZIONE
Valore misurato della resistenza d'isolamento in prossimità del valore critico
Se il valore misurato è prossimo al valore critico, è necessario tenere controllata la
resistenza di isolamento ad intervalli temporali brevi.
I valori sono validi per la misurazione alla temperatura dell'avvolgimento di 25 °C.
228
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Avvertenze sull'uso dei motori
7.5 Messa in servizio
7.5.4
Inserzione
Prima di avviare il motore occorre fare attenzione alla corretta parametrizzazione del
convertitore di frequenza.
Utilizzare adeguati tool di messa in servizio, ad es. "Drive ES" o "STARTER".
CAUTELA
Funzionamento irregolare o rumori anomali
Una manipolazione non corretta durante il trasporto, il magazzinaggio o il montaggio può
danneggiare il motore. L'uso di un motore danneggiato può causare danni all'avvolgimento,
ai cuscinetti o danni irreversibili.
Disinserire il motore in caso di funzionamento non corretto o in caso di rumori anomali e
determinarne la causa.
CAUTELA
Rispetto del numero di giri massimo
Il numero di giri massimo nmax è il numero di giri d'esercizio massimo consentito. Il numero
di giri massimo è indicato sulla targhetta dei dati tecnici (targhetta identificativa).
Se il numero di giri nmax viene superato, possono verificarsi danni a cuscinetti, anelli di
cortocircuito, accoppiamenti forzati, ecc. Pertanto occorre garantire che la velocità non
superi il limite massimo utilizzando un sistema di controllo adeguato o attivando la
sorveglianza del numero di giri nel sistema di azionamento.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
229
Avvertenze sull'uso dei motori
7.6 Esercizio
7.6
Esercizio
Durante il funzionamento il motore deve essere collegato all'alimentazione dell'acqua di
raffreddamento. In caso di funzionamento senza raffreddamento ad acqua occorre tenere
conto del derating (rivolgersi per questo alla propria rappresentanza Siemens competente).
CAUTELA
Se l'alimentazione dell'acqua di raffreddamento viene meno o se il motore funziona
brevemente senza raffreddamento ad acqua, il motore si surriscalderà. Ne possono
conseguire danni materiali anche irreversibili.
Non attivare mai il motore senza aver collegato l'alimentazione dell'acqua di
raffreddamento. Sorvegliare le temperature ammesse dell'acqua in ingresso.
CAUTELA
Danni da condensa
Forti oscillazioni della temperatura ambiente, irraggiamento solare diretto o umidità elevata
dell'aria possono provocare fenomeni di condensa.
Se l'avvolgimento statorico è umido, la sua resistenza d'isolamento diminuisce. Di
conseguenza è possibile che si verifichino scariche superficiali che possono distruggere
l'avvolgimento. Inoltre la condensa può provocare la formazione di ruggine all'interno della
macchina.
AVVERTENZA
Pericolo di ustioni dovute al vapore
Quando l'acqua penetra nel motore caldo, si sviluppa improvvisamente vapore che
fuoriesce ad alta pressione. Il sistema di raffreddamento può esplodere. Ne possono
conseguire la morte, lesioni gravi e danni materiali.
Collegare l'alimentazione dell'acqua solo dopo che il motore si è raffreddato.
AVVERTENZA
Non rimuovere le coperture di protezione con il motore funzionante
Le parti rotanti o sotto tensione rappresentano un pericolo. La rimozione delle coperture
necessarie può provocare la morte, gravi lesioni corporali o danni materiali.
Le coperture di protezione che impediscono il contatto con parti attive o rotanti, che
garantiscono il grado di protezione del motore, oppure che sono necessarie per garantire
una circolazione dell'aria corretta e quindi un raffreddamento efficace, non devono essere
aperte durante il funzionamento.
230
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Avvertenze sull'uso dei motori
7.6 Esercizio
AVVERTENZA
Anomalie durante il funzionamento
Qualsiasi variazione rispetto alle condizioni normali di funzionamento (aumento
dell'assorbimento di potenza, della temperatura o delle oscillazioni, rumori insoliti,
intervento dei dispositivi di sorveglianza, ecc.) indica che il funzionamento è compromesso.
Questo può provocare anomalie in grado di causare direttamente o indirettamente la morte,
gravi lesioni corporali o danni materiali.
Contattare immediatamente il personale addetto alla manutenzione. In caso di dubbio
occorre disinserire immediatamente il motore tenendo presenti le condizioni di sicurezza
specifiche dell'impianto.
CAUTELA
Pericolo di ustioni
Alcuni componenti del motore possono raggiungere temperature superiori a 100 °C. Il
contatto con queste parti può causare ustioni.
Prima di toccare i componenti, verificarne la temperatura ed eventualmente adottare le
misure di protezione necessarie.
7.6.1
Pause di esercizio
Accorgimenti per motori fermi pronti per il funzionamento
● In caso di pause di esercizio prolungate, mettere in moto la macchina regolarmente circa
una volta al mese.
● Prima di rimettere in servizio il motore, consultare la sezione "Inserzione".
ATTENZIONE
Danni da immagazzinaggio inadeguato
Un immagazzinaggio inadeguato può provocare danni al motore.
Nel caso di lunghe pause di esercizio, mettere in atto provvedimenti per la protezione
contro la corrosione, per la conservazione e per l'asciugatura.
Nel caso di nuova messa in servizio dopo una lunga pausa di inattività, adottare i
provvedimenti consigliati nel capitolo "Messa in servizio".
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
231
Avvertenze sull'uso dei motori
7.6 Esercizio
7.6.2
Spegnimento
Provvedimenti per la disinserzione
● Per la disinserzione, attenersi alle istruzioni operative del convertitore di frequenza
utilizzato.
● In caso di fermi macchina prolungati occorre scollegare l'alimentazione dell'acqua di
raffreddamento.
7.6.3
Anomalie
In caso di variazioni rispetto al funzionamento normale o di anomalie, seguire innanzitutto le
indicazioni della tabella seguente. Attenersi inoltre al capitolo corrispondente della
documentazione dei componenti dell'intero sistema di azionamento.
Mantenere attiva la funzionalità dei dispositivi di protezione anche durante il funzionamento
di prova.
ATTENZIONE
Danni alla macchina dovuti ad anomalie
Eliminare la causa dell'anomalia secondo i rimedi proposti. Eliminare anche gli eventuali
danni verificatisi sulla macchina/sul motore.
Nota
Se durante il funzionamento della macchina con un convertitore si verificano anomalie
elettriche, fare riferimento alle istruzioni operative del convertitore di frequenza.
Tabella 7- 6
Anomalie possibili
Anomalia
Causa dell'anomalia (vedere la tabella con le spiegazioni)
Il motore non si avvia
A
Il motore si avvia con difficoltà
A
E
C
E
F
C
E
F
A
C
E
F
A
C
Rumore tipo ronzio all'avviamento
Rumore tipo ronzio in esercizio
B
Eccessivo riscaldamento nel funzionamento a vuoto
Eccessivo riscaldamento nel funzionamento con
carico
Elevato riscaldamento di singole sezioni
dell'avvolgimento
Funzionamento irregolare
Rumore di sfregamento, rumorosità di marcia
Vibrazioni radiali
Vibrazioni assiali
Fuoriuscita di acqua
232
D
E
G
H
G
H
F
J
K
L
M
N
O
O
S
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Avvertenze sull'uso dei motori
7.6 Esercizio
Tabella 7- 7
Cause delle anomalie e rimedi possibili
N.
Cause di anomalia
Rimedi
A
Sovraccarico
Ridurre il carico
B
Interruzione di una fase nel cavo di alimentazione
Controllare il convertitore di frequenza e i cavi di
alimentazione
C
Interruzione di una fase nel cavo di alimentazione
dopo l'inserzione
Controllare il convertitore di frequenza e i cavi di
alimentazione
D
Tensione di uscita del convertitore eccessiva,
frequenza insufficiente
Verificare le impostazioni sul convertitore di frequenza,
eseguire l'identificazione automatica del motore
E
Avvolgimento statorico connesso in modo errato
Controllare il cablaggio dell'avvolgimento
F
Cortocircuito tra spire o cortocircuito tra le fasi
nell'avvolgimento dello statore
Determinare le resistenze dell'avvolgimento e di
isolamento; l'eventuale riparazione va eseguita previa
consultazione con il produttore
G
Acqua di raffreddamento non collegata / disinserita
Controllare il raccordo dell'acqua di raffreddamento /
inserire l'acqua di raffreddamento
Guasto all'allacciamento dell'acqua o ai tubi
Individuare la perdita e ripararla; eventualmente
contattare il produttore
Quantità insufficiente di acqua di raffreddamento
Aumentare la quantità d'acqua
Temperatura d'ingresso troppo elevata
Impostare la temperatura d'ingresso corretta
J
Schermatura del motore e/o dei cavi di segnale
insufficiente
Controllare la schermatura e la messa a terra
K
Guadagno del regolatore dell'azionamento troppo
elevato
Adeguare il guadagno del regolatore
L
Rettificare le parti rotanti
Determinare la causa, ritoccare il pezzo
Corpo estraneo all'interno del motore
Rivolgersi al costruttore per la riparazione
Guasto del cuscinetto
Rivolgersi al costruttore per la riparazione
M
Equilibratura non corretta del rotore
Disaccoppiare il rotore ed eseguire una nuova
equilibratura
N
Il rotore non ruota in modo uniforme, albero piegato
Rivolgersi al costruttore
O
Allineamento difettoso
Allineare il gruppo macchina
S
Tubi dell'acqua di raffreddamento / allacciamento
dell'acqua difettosi
Individuare la perdita e ripararla oppure contattare il
costruttore
H
Se nonostante i rimedi elencati sopra risulta impossibile eliminare il problema, rivolgersi al
costruttore o al Siemens Service Center (vedere il capitolo "Appendice").
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
233
Avvertenze sull'uso dei motori
7.7 Manutenzione
7.7
Manutenzione
7.7.1
Avvertenze di sicurezza
In caso di dubbi, rivolgersi al costruttore indicando il tipo di macchina e il numero di serie,
oppure affidarsi, per gli interventi di manutenzione, a uno dei Siemens Service Center.
PERICOLO
Scossa elettrica al contatto di parti sotto tensione
Le parti elettriche sono soggette a una corrente elettrica pericolosa. Al contatto di queste
parti si riceve una scarica elettrica.
Ne conseguono pericoli per la vita e l'incolumità delle persone.
Prima di iniziare qualsiasi lavoro sulle macchine accertarsi che l'impianto sia stato
disinserito in modo conforme alle disposizioni. Oltre ai circuiti principali, prestare attenzione
anche ad eventuali circuiti ausiliari o supplementari presenti, in particolare al dispositivo di
riscaldamento.
AVVERTENZA
Pericolo di ustioni
Sulla carcassa delle macchine elettriche si possono riscontrare temperature elevate fino a
> 100 °C.
Se si toccano i componenti della macchina durante il funzionamento si possono subire
gravi ustioni.
Le carcasse delle macchine non devono essere toccate né durante il loro funzionamento,
né immediatamente dopo. Lasciare raffreddare la carcasse delle macchine prima di iniziare
qualsiasi tipo di intervento.
Misure di sicurezza
Prima di iniziare qualsiasi intervento di manutenzione mettere assolutamente in pratica le
seguenti regole di sicurezza:
1. Disinserire la macchina
2. Garantire una protezione contro la reinserzione
3. Verificare l'assenza di tensione
4. Eseguire la messa a terra e cortocircuitare
5. Coprire o isolare le parti adiacenti sotto tensione
234
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Avvertenze sull'uso dei motori
7.7 Manutenzione
7.7.2
Manutenzione ordinaria
ATTENZIONE
Gli interventi di manutenzione e riparazione (sostituzione dell'encoder e dei cuscinetti)
vengono eseguiti solo dal produttore.
7.7.3
Lubrificazione
I cuscinetti dei motori Torque completi sono a lubrificazione permanente e dimensionati per
una temperatura ambiente minima di funzionamento di -15 °C.
Nota
Se i cuscinetti sono privi di dispositivo di lubrificazione, se ne consiglia la sostituzione dopo
circa 20000 ore di esercizio a una temperatura ambiente max. di 40 °C, tuttavia al più tardi
dopo 5 anni (dalla fornitura).
Dispositivo di lubrificazione (opzione per 1FW315x e 1FW320x)
In questo modo, se vengono rispettati gli intervalli di lubrificazione e se non viene superata la
temperatura ambiente di 40 °C, l'intervallo di sostituzione dei cuscinetti aumenta a circa
40000 h.
Nota
È opportuno che la lubrificazione venga effettuata manualmente utilizzando un ingrassatore
a siringa (non una pressa idraulica). Rispettare le quantità di grasso. È opportuno che la
lubrificazione avvenga quando il motore è in funzione a ridotto numero di giri e in assenza di
condizioni di pericolo per le persone. Gli intervalli di lubrificazione consigliati sono validi per
carichi normali:
• Funzionamento con numero di giri conforme alle indicazioni riportate sulla targhetta dei
dati tecnici
• Funzionamento a ridotta presenza di vibrazioni
• Utilizzo di grassi specifici per cuscinetti a rulli
Tabella 7- 8
Cuscinetto con dispositivo di lubrificazione (opzione per 1FW315x e 1FW320x)
nN [1/min]
Durata dei
cuscinetti con
dispositivo di
lubrificazione [h]
Intervallo di
lubrificazione
[h]
Quantità di
grasso 1) su
DE [g]
Quantità di
grasso 1) su
NDE [g]
1FW315x
300/500/750
40000
10000
30
20
1FW320x
150/300/500
40000
10000
30
20
1FW328x-2
150/250
40000
10000
80
60
1FW328x-3
400
40000
6500
80
60
600
24000
4000
80
60
Motore
1)
Definizione del grasso dei cuscinetti: Klüberquiet BQH72-102
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
235
Avvertenze sull'uso dei motori
7.8 Messa fuori servizio e smaltimento
7.8
Messa fuori servizio e smaltimento
7.8.1
Smaltimento
Preparazione dello smontaggio
Lo smontaggio della macchina deve essere svolto o sorvegliato da personale qualificato e
adeguatamente preparato.
1. Contattare una ditta locale specializzata nello smaltimento. Specificare il tipo di
smontaggio desiderato per la macchina e le modalità di recupero dei componenti.
2. Attenersi alla cinque regole di sicurezza.
3. Rimuovere tutti i collegamenti elettrici.
4. Eliminare tutti i liquidi, come olio, acqua, ecc.
5. Rimuovere tutti i cavi.
6. Sbloccare i sistemi di fissaggio della macchina.
7. Trasportare la macchina in un luogo adatto allo smontaggio.
Attenersi anche alle indicazioni del capitolo "Manutenzione".
Smontaggio del motore
Smontare la macchina seguendo la procedura meccanica tipica.
ATTENZIONE
Smontaggio del rotore
Lo smontaggio del rotore di una macchina con magneti permanenti può essere effettuato
solo dal costruttore. All'occorrenza, rivolgersi al centro di assistenza Siemens.
AVVERTENZA
Alcune parti della macchina rischiano di cadere
La macchina è composta di parti dal peso elevato, che possono cadere durante le
operazioni di smontaggio. Ne possono conseguire la morte, lesioni gravi e danni materiali.
Assicurare queste parti della macchina in modo che non possano cadere durante lo
smontaggio.
Lo smaltimento dei motori deve avvenire nel rispetto delle prescrizioni nazionali e locali
relative al normale processo di trattamento dei materiali oppure restituendoli al costruttore.
236
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Avvertenze sull'uso dei motori
7.8 Messa fuori servizio e smaltimento
Smagnetizzare i magneti permanenti
I magneti permanenti devono essere smagnetizzati prima di essere smaltiti. Così facendo si
evitano possibili rischi durante e dopo lo smaltimento. I magneti permanenti vengono
smagnetizzati con un trattamento termico ad alta temperatura.
Per la smagnetizzazione dei magneti permanenti esistono le seguenti possibilità:
● Affidare l'intera macchina a una ditta specializzata per il trattamento termico.
● Restituire la macchina al produttore, che provvederà a smontare e smagnetizzare i
magneti permanenti. Un rotore smontato ma non smagnetizzato non può essere
trasportato.
ATTENZIONE
Smontaggio del rotore
Lo smontaggio del rotore di una macchina con magneti permanenti può essere
effettuato solo dal costruttore. All'occorrenza, rivolgersi al centro di assistenza Siemens.
7.8.2
Smaltimento
Proteggere l'ambiente e risparmiare le sue risorse sono scopi aziendali assolutamente
prioritari di Siemens. Un sistema internazionale di gestione ambientale ISO 14001 provvede
al rispetto delle leggi e fissa in questo senso degli standard elevati. Già nella fase di sviluppo
dei prodotti, il rispetto per l'ambiente, la sicurezza tecnica e la protezione della salute sono
per noi un imperativo costante.
Il capitolo seguente riporta alcune raccomandazioni per il corretto smaltimento della
macchina e dei suoi componenti. Attenersi alle disposizioni locali in materia di smaltimento
dei rifiuti.
Componenti
Separare i componenti per il riciclaggio secondo le seguenti categorie:
● rottami elettronici, ad es. elettronica dell'encoder
● rottame ferroso
● alluminio
● metallo non ferroso, ad es. avvolgimenti di motori
● Materiali isolanti
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
237
Avvertenze sull'uso dei motori
7.8 Messa fuori servizio e smaltimento
materiali ausiliari e prodotti chimici
Separare i materiali ausiliari e i prodotti chimici per il riciclaggio secondo le seguenti
categorie:
● olio
smaltire l'olio usato come rifiuto speciale secondo la normativa
● grasso
● solventi
● detergenti a freddo
● residui di vernice
Non miscelare solventi, detergenti a freddo e residui di vernice.
Materiali isolanti
I materiali di isolamento elettrico sono utilizzati prevalentemente nello statore. Alcuni
componenti aggiuntivi sono prodotti da materiali simili e possono perciò essere trattati nello
stesso modo. Si tratta dei seguenti materiali:
● vari isolatori utilizzati nelle morsettiere
● trasformatori di tensione e di corrente
● cavi di corrente
● cablaggi di strumenti
● scaricatori di sovratensione
● condensatori
238
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
A
Appendice
A.1
Definizione dei concetti
Coppia da fermo M0
Coppia limite termica con il motore fermo corrispondente allo sfruttamento a 100 K. Questa
coppia può essere fornita, senza limitazione di tempo, con n = 0. M0 è sempre maggiore
della coppia nominale MN.
Coppia di frenatura MBr eff
MBr eff corrisponde alla coppia di frenatura media durante la frenatura mediante cortocircuito
dell'indotto che viene raggiunta mediante la resistenza di frenatura Ropt collegata a monte.
Coppia massima Mmax
Coppia che viene generata con la massima corrente ammessa.
Coppia nominale MN
Coppia continuativa termica ammissibile nel servizio S1 con numero di giri nominale del
motore.
Corrente da fermo I0
Corrente di ramo del motore per generare la corrispondente coppia da fermo. Indicazione
del valore effettivo di una corrente sinusoidale.
Corrente massima Imax, eff
Questo limite di corrente è determinato dal circuito magnetico. Un superamento anche per
breve tempo porta a una smagnetizzazione irreversibile del materiale magnetico. Indicazione
del valore effettivo di una corrente sinusoidale.
Corrente nominale IN
Corrente di ramo effettiva del motore per generare la corrispondente coppia nominale.
Indicazione del valore effettivo di una corrente sinusoidale.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
239
Appendice
A.1 Definizione dei concetti
Costante di coppia kT (valore con una sovratemperatura media degli avvolgimenti di 100 K)
Quoziente della coppia e della corrente da fermo.
Calcolo:
kT = M0, 100K / I0, 100K
Nota
Questa costante non è valida per la progettazione delle correnti nominali e di accelerazione
richieste (perdite del motore!).
Nel calcolo vanno considerati anche il carico statico e le coppie d'attrito.
Costante di tempo meccanica Tmecc
La costante di tempo meccanica viene determinata dalla tangente di una funzione
esponenziale teorica.
Tmecc = 3 ∙ RStr ∙ Jmot/kT2 [s]
Jmot
=
Momento d'inerzia del servomotore [kgm2]
RStr
=
Resistenza di una fase dell'avvolgimento statorico [Ohm]
kT
=
Costante di coppia [Nm/A]
Costante di tensione kE (valore con temperatura del rotore di 20 °C)
Valore della tensione indotta del motore con un numero di giri pari a 1000 1/min con una
temperatura del rotore di 20 °C.
Viene indicata la tensione concatenata effettiva sui morsetti del motore.
Costante elettrica di tempo Tel
Quoziente dell'induttanza del campo rotante e della resistenza dell'avvolgimento. Tel =
LD/RStr
Costante termica di tempo Tth
Descrive l'aumento di temperatura della struttura del motore con un innalzamento repentino
del carico alla coppia ammessa S1. Dopo Tth il motore ha raggiunto il 63% della sua
temperatura di esercizio.
DE
Drive end = lato azionamento del motore
240
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Appendice
A.1 Definizione dei concetti
Induttanza del campo rotante LD
L'induttanza del campo rotante è costituita dalla somma dell'induttanza del traferro d'aria e
dell'induttanza parassita, riferita al circuito equivalente a un solo ramo. Essa si compone
dell'induttanza propria di un ramo e dell'induttanza di accoppiamento verso gli altri rami.
Momento di inerzia Jmot
Momento di inerzia delle masse delle parti rotanti del motore.
NDE
Non drive end = lato opposto all'azionamento del motore
Numero di giri massimo nmax
Il numero di giri massimo ammesso durante il funzionamento nmax è il valore minimo del
numero di giri massimo ammesso a livello meccanico e del numero di giri massimo
ammesso sul convertitore.
Per processi altamente dinamici la coppia massima è disponibile per un tempo brevissimo.
La coppia massima viene limitata con i parametri di regolazione. Un aumento della corrente
causa la smagnetizzazione del rotore.
Numero di giri massimo ammesso (a livello meccanico) nmax mecc
Il numero di giri massimo ammesso a livello meccanico durante il funzionamento è nmax mecc.
Esso deriva dalle forze centrifughe e di attrito del cuscinetto.
Numero di giri massimo ammesso sul convertitore nmax Inv
Il numero di giri massimo ammesso durante il funzionamento su un convertitore è pari a nmax
Esso si ottiene dalla tensione indotta nel motore e dalla resistenza alla tensione del
convertitore.
Inv.
Numero di giri nominale nN
Mediante il numero di giri nominale viene definito nel diagramma numero di giri-coppia il
campo del numero di giri caratteristico per il motore.
Numero di poli 2p
Numero dei poli magnetici nord e sud sul rotore. p è il numero di coppie polari.
Rendimento ηopt
Rendimento massimo raggiungibile sulla curva caratteristica S1 o al di sotto della curva
caratteristica S1 senza corrente di deflussaggio.
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
241
Appendice
A.1 Definizione dei concetti
Resistenza dell'avvolgimento RStr con temperatura avvolgimento di 20 °C
Viene indicata la resistenza di ramo di una fase con una temperatura dell'avvolgimento di 20
°C. L'avvolgimento è collegato a stella.
Resistenza di frenatura Ropt
Rott corrisponde al valore di resistenza ottimale per ogni ramo collegato esternamente in
serie all'avvolgimento del motore in caso di funzione di frenatura mediante cortocircuito
dell'indotto.
Resistenza torsionale dell'albero cT
Viene indicata la rigidità alla torsione dell'albero dal centro del pacco lamierini del rotore fino
al centro dell'estremità dell'albero.
242
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Appendice
A.2 Dichiarazione di conformità
A.2
Dichiarazione di conformità
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
243
Appendice
A.3 Siemens Service Center
A.3
Siemens Service Center
All'indirizzo Internet
http://www.siemens.com/automation/partner
si possono trovare in tutto il mondo informazioni su tecnologie specifiche tramite i partner di
riferimento Siemens.
Per quanto possibile, in ogni località è disponibile un partner di riferimento per
● Supporto tecnico
● Pezzi di ricambio/riparazioni
● Service
● Corsi di formazione
● Vendita oppure
● Consulenza specialistica/engineering.
Inizialmente si avvia la ricerca con la selezione
● di un Paese,
● di un prodotto oppure
● di un settore.
In seguito, definendo ulteriori criteri è possibile trovare esattamente i partner di riferimento
desiderati con l'indicazione delle rispettive competenze.
244
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Appendice
A.4 Bibliografia
A.4
Bibliografia
Elenco delle pubblicazioni del manuale di progettazione
Un elenco aggiornato delle pubblicazioni, con le rispettive lingue disponibili, si trova in
Internet all'indirizzo: www.siemens.com/motioncontrol
Seguire le voci di menu "Support" → "Documentazione tecnica" → "Ordinazione della
documentazione"→ "Documentazione stampata".
Cataloghi
Sigla
Nome del catalogo
NC 61
SINUMERIK & SINAMICS
NC 60
SINUMERIK & SIMODRIVE
PM 21
SIMOTION & SINAMICS
DA 65.3
Servomotori
DA 65.4
SIMODRIVE 611 universal e POSMO
DA 65.10
SIMOVERT MASTERDRIVES VC
DA 65.11
SIMOVERT MASTERDRIVES MC
Documentazione elettronica
Sigla
DOC ON CD
CD1
Il sistema SINUMERIK
(con tutti i controlli SINUMERIK 840D/810D e SIMODRIVE 611D)
CD2
Il sistema SINAMICS
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
245
Appendice
A.5 Proposte/correzioni
A.5
Proposte/correzioni
Se durante la lettura del manuale doveste trovare qualche errore di stampa, Vi preghiamo
di volercelo comunicare con questo modulo. Vi siamo altresì grati per eventuali
suggerimenti e proposte di miglioramento.
0LWWHQWH
$
6,(0(16$*
,'70&06
3RVWIDFK
1RPH
,QGLUL]]RGHOODGLWWDGHOO
XIILFLR
9LD '(UODQJHQ
&$3
)D[GRFXPHQWD]LRQH
PDLOWRGRFXPRWLRQFRQWURO#VLHPHQVFRP
KWWSZZZVLHPHQVFRPDXWRPDWLRQVHUYLFHVXSSRUW
/RFDOLW¢
7HOHIRQR
)D[
3URSRVWHHRFRUUH]LRQL
246
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Indice analitico
A
Anomalie, 232
Avvertenze di pericolo, 7
Avvertenze ESD, 9
C
Campi d'applicazione, 18
Caratteristica di coppia, 59
Caratteristiche tecniche, 20
Collegamenti elettrici, 197
Compatibilità ambientale, 10
Copertura dell'albero, 57
D
Diagrammi coppia-numero di giri
1FW3150-1xH, 66
1FW3150-1xL, 68
1FW3150-1xP, 70
1FW3152-1xH, 72
1FW3152-1xL, 74
1FW3152-1xP, 76
1FW3154-1xH, 78
1FW3154-1xL, 80
1FW3154-1xP, 82
1FW3155-1xH, 84
1FW3155-1xL, 86
1FW3155-1xP, 88
1FW3156-1xH, 90
1FW3156-1xL, 92
1FW3156-1xP, 94
1FW3201-1xE, 96
1FW3201-1xH, 98
1FW3201-1xL, 100
1FW3202-1xE, 102
1FW3202-1xH, 104
1FW3202-1xL, 106
1FW3203-1xE, 108
1FW3203-1xH, 110
1FW3203-1xL, 112
1FW3204-1xE, 114
1FW3204-1xH, 116
1FW3204-1xL, 118
1FW3206-1xE, 120
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
1FW3206-1xH, 122
1FW3206-1xL, 124
1FW3208-1xE, 126
1FW3208-1xH, 128
1FW3208-1xL, 130
1FW3281-2xE, 132
1FW3281-2xG, 134
1FW3281-3xJ, 148
1FW3281-3xM, 150
1FW3283-2xE, 136
1FW3283-2xG, 138
1FW3283-3xJ, 152
1FW3283-3xM, 154
1FW3285-2xE, 140
1FW3285-2xG, 142
1FW3285-3xJ, 156
1FW3285-3xM, 158
1FW3287-2xE, 144
1FW3287-2xG, 146
1FW3287-3xJ, 160
1FW3287-3xM, 162
Dichiarazione di conformità, 243
Dispositivo di lubrificazione, 235
E
Encoder assoluto, 186
Encoder incrementale, 184
Estremità d'albero, 57
F
Forza assiale, 53
Forza radiale, 53
Frenatura mediante cortocircuito dell'indotto, 190, 194
Frequenze proprie di montaggio, 218
G
Grado di protezione, 51
I
Immagazzinaggio, 211
Intervallo per la sostituzione dei cuscinetti, 235
Ispezione e manutenzione, 234
247
Indice analitico
K
KTY 84, 177
M
Messa in servizio, 225
Morsettiera, 198
P
Procedura di progettazione, 30
Prodotti di terze parti, 10
Progettazione, 27
Protezione termica del motore, 177
Termistore PTC, 178
R
Resistenze di frenatura, 190
Resolver, 188
S
Senso di rotazione, 57
Siemens Service Center, 244
Sistemi di bloccaggio, 220
SIZER, 27
Smaltimento, 10
Spegnimento, 232
STARTER, 29
T
Targhetta dei dati del motore, 25
Targhetta dei dati tecnici, 25
Termistore PTC, 178
Tipo di cuscinetto, 51
Trasporto, 210
V
Verniciatura, 58
248
Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
Indice analitico
SINAMICS S120 Motori Torque completi 1FW3
Manuale di progettazione, 08/2009 (PKTS), 6SN1197-0AD70-0CP4
249
Siemens AG
Industry Sector
Drive Technologies
Motion Control Systems
Postfach 3180
91050 ERLANGEN
GERMANY
Con riserva di modifiche
© Siemens AG 2009
www.siemens.com/motioncontrol