PROPRIETÀ DIELETTRICHE DELLA MATERIA
a cura di Nicola Tedeschi
June 16, 2014
1
La polarizzazione: un modello microscopico
Le proprietà dielettriche della materia sono legate al fenomeno della polarizzazione elettrica. Quando si applica un
campo elettrico esterno ad un materiale in esso si genera una sorta di risposta, ovvero un campo elettrico che si
oppone a quello esterno. Prima di tutto cerchiamo di dare un’interpretazione microscopica della polarizzazione nei
dielettrici.
Quando ad un materiale dielettrico, tale cioè da essere elettricamente neutro ed avente gli elettroni fortemente
legati agli atomi, si applica un campo elettrico, possono verificarsi due fenomeni:
1. Polarizzazione per deformazione: le molecole del materiale vengono deformate dal campo elettrico esterno,
acquistando un momento di dipolo elettrico.
2. Polarizzazione per orientamento: nel caso le molecole del materiale siano dotate di un momento di dipolo
proprio, esse tenderanno ad allinearsi con il campo esterno.
Trattiamo i due casi separatamente.
Chiamando Z il numero atomico del generico atomo del materiale e r lo spostamento del nucleo dell’atomo dalla
posizione di equilibrio dovuto alla presenza del campo elettrico; il momento di dipolo dovuto alla deformazione si
potrà scrivere come segue:
p=Z er
(1)
dove con e si è indicata la carica dell’elettrone. Nel caso di campi elettrici esterni non troppo intensi lo spostamento
r potrà essere considerato linearmente proporzionale al campo elettrico esterno e quindi si avrà:
p = Z e r = αe Ei
(2)
dove Ei è il campo elettrico visto dall’atomo, il quale sarà la sovrapposizione del campo elettrico esterno e del
campo elettrico dovuto a tutti gli altri atomi; αe è detta polarizzabilità elettronica. Tale grandezza riveste un ruolo
fondamentale in tutti i problemi di omogeneizzazione elettrica. Più avanti vedremo come l’aver trovato un legame
di proporzionalità diretta tra momento di dipolo microscopico e campo elettrico sia l’unico requisito necessario per
poter ricavare un modello macroscopico semplice della polarizzazione.
Passiamo ora alla polarizzazione per orientamento e vediamo come anche in questo caso si possa trovare un
legame lineare tra il momento di dipolo e il campo elettrico. Consideriamo un materiale in cui i singoli atomi
(o molecole) siano dotati di un dipolo elettrico p0 . A causa dell’agitazione termica la funzione di distribuzione
statistica dei dipoli sarà una distribuzione di Boltzmann:
U
f (U ) = Ae− kT
(3)
dove k è la costante di Boltzmann, T è la temperatura, e U è l’energia del dipolo: U = −p0 · E i . La costante di
normalizzazione A si ottiene imponendo che l’integrale in tutto lo spazio della distribuzione f (U ) sia uguale a 1,
ovvero, considerando solo la dipendenza dall’angolo solido infinitesimo dΩ, quind df = f dΩ, si piò scrivere:
Z 4π
f (U )dΩ = 1
(4)
0
Esplicitiamo il momento di dipolo nella distribuzione:
f (U ) = Ae
1
p0 ·Ei cosθ
kT
(5)
dove θ è l’angolo tra i vettori p0 e E i . Supponiamo ora che il campo elettrico sia sufficientemente piccolo da poter
considerare p0 Ei << k T , allora potremo scrivere:
p0 Ei cos θ ∼
p0 Ei
exp
cos θ
(6)
=1 +
kT
kT
di conseguenza potremo riscrivere l’integrale come segue:
Z π
Z 4π
Z 2π Z π p0 Ei
p0 Ei
A 1 +
cos θ sin θ dθ dϕ = 2πA
sin θ +
cos θ sin θ dθ =
1=
f (U )dΩ =
kT
kT
0
0
0
0
π
Z π
p0 Ei
p0 Ei
= 2πA
sin θ +
sin(2θ) dθ = 2πA − cos θ −
cos(2θ) =
2k
T
kT
0
0
p0 Ei
p0 Ei
= 2πA 1 + 1 −
+
= 4πA
(7)
kT
kT
da cui:
A=
1
4π
(8)
A questo punto, possiamo facilmente ricavare il momento di dipolo medio del materiale, essendo p = p0 cosθ la
proiezione del momento di dipolo del singolo atomo nella direzione del campo elettrico, potremo scrivere il dipolo
medio come segue:
Z
Z 4π
<p> =
p df =
p0 cos θ f dθdϕ =
0
Z 2π Z π
1
p0 Ei
1 +
=
cos θ sin θ dθ dϕ =
p0 cos θ ·
4π
kT
0
0
Z π
p0
p0 Ei
2
=
sin θ cos θ +
cos θ sin θ dθ
(9)
2 0
kT
ponendo ξ = cos θ ⇒ dξ = − sin θ dθ, si ottiene:
Z
p0 Ei 3 i1
p0 −1 p0 Ei 2 p0 h ξ 2
p2 Ei
ξ dξ =
+
ξ
<p> = −
ξ +
= 0
2 1
kT
2 2
3k T
3k T
−1
(10)
dove αo è detta polarizzabilità per orientamento.
2
Il vettore polarizzazione e l’induzione elettrica
Abbiamo visto il semplice modello microscopico con cui si può trattare la polarizzazione della materia. Andiamo
ora a vedere come sia possibile trattare questo fenomeno a livello macroscopico. Definiamo a questo scopo il vettore
polarizzazione elettrica come il momento di dipolo elettrico per unità di volume posseduto dal materiale:
P =
dN
<p>
dτ
(11)
dove dN è il numero di dipoli presenti nel volume infinitesimo dτ . Come di consueto quando si trattano fenomeni
microscopici di questo tipo, si deve fare l’ipotesi che il numero di dipoli per unità di volume sia ancora sufficientemente grande da rispettare le previsioni statistiche. Consideriamo a questo punto il potenziale dovuto alla presenza
dei dipoli nel generico volume dτ :
dV =
1 P (r0 ) (r − r0 )
1 < p > · (r − r0 )
dN =
dτ 0
0
3
4π0
|r − r |
4π0
|r − r0 |3
(12)
dove, come di consueto, con r indichiamo il generico vettore posizione e con r0 indichiamo il vettore sorgente. Per
ottenere il potenziale dovuto a un volume finito τ dovremo procedere con una integrazione:
Z
1
P (r0 ) (r − r0 )
V (r) =
dτ 0
(13)
4π0 τ
|r − r0 |3
2
Ora notiamo che:
r − r0
= −∇
|r − r0 |3
1
|r − r0 |
= ∇0
1
|r − r0 |
(14)
dove con ∇0 abbiamo indicato l’operatore rispetto alle variabili r0 . Andando a sostituire nell’integrale, si ottiene:
Z
1
1
0
0
V (r) =
P (r ) · ∇
dτ 0
(15)
4π0 τ
|r − r0 |
Ricordando l’identità vettoriale:
∇ · (φA) = φ∇ · A + A · ∇φ
(16)
potremo scrivere:
V (r) =
1
4π0
Z
∇·
τ
P
|r − r0 |
dτ 0 −
Z
τ
∇· P
dτ 0
|r − r0 |
Applicando il teorema della divergenza al primo integrale:
Z
Z
1
−∇ · P
P · n0
dS +
dτ
V (r) =
0
0
4π0
τ |r − r |
S |r − r |
(17)
(18)
Ricordando ora la forma del potenziale dovuto a una generica distribuzione di carica superficiale e a una di carica
volumica:
Z
Z
σ(r0 )
ρ(r0 )
1
0
0
V (r) =
dS +
dτ
(19)
0
0
4π0
S |r − r |
τ |r − r |
Riconosciamo subito l’analogia tra queste due espressioni. Vediamo infatti che il primo integrale in (18) è analogo
al primo integrale in (19) e cosı̀ per il secondo integrale in entrambe le espressioni. Possiamo dire quindi che
l’effetto della polarizzazione può essere tenuto in conto a un livello macroscopico considerando delle distribuzioni
di carica superficiale e volumica equivalenti. In altre parole, l’effetto della polarizzazione è equivalente all’effetto
che avrebbero una distribuzione di carica superficiale e una volumica all’interno del materiale. Il legame tra tali
distribuzioni e il vettore di polarizzazione è il seguente:
σp = P · n0
(20)
ρp = −∇ · P
(21)
Notiamo che la distribuzione superficiale σp sarà presente sulla superficie esterna del materiale, di cui n0 è la normale esterna. Quindi σp assumerà un ruolo importante all’interfaccia tra il materiale e il vuoto (o con un altro
materiale).
Il modello sviluppato permette di tenere conto a livello macroscopico, nelle equazioni di Maxwell, della polarizzazione. Consideriamo la prima equazione di Maxwell all’interno di un materiale:
∇· E =
1
ρT
0
(22)
dove con ρT indichiamo la distribuzione di carica volumica totale, comprendente la distribuzione di cariche libere ρ
e quella equivalente dovuta alla polarizzazione ρp :
ρT = ρ + ρp
(23)
Potremo riscrivere l’equazione come segue:
∇· E =
1
(ρ + ρp )
0
(24)
da cui:
∇· D = ρ
3
(25)
Avendo definito il vettore di induzione elettrica come segue:
D = 0 E + P
(26)
Riprendiamo a questo punto il legame trovato tra il momento di dipolo microscopico ed il campo elettrico nel
caso generale in cui ci siano sia la polarizzazione per orientamento che per deformazione:
< p0 > = (αo + αd ) Ei
(27)
Da cui il vettore di polarizzazione si potrà esprimere come segue:
P = n (αo + αd ) Ee
(28)
dove n è il numero di dipoli per unità di volume. Abbiamo detto che Ei è il campo elettrico visto dal singolo dipolo,
quindi è un campo elettrico locale. Nel caso in cui il materiale non sia troppo denso, ovvero nel caso in cui le
interazioni tra i dipoli possano essere trascurate, potremo considerare E i ∼
= E, quindi:
P = 0 χE
(29)
Avendo definito la suscettività elettrica del materiale come:
χ =
n
(αo + αd )
0
(30)
dalla suscettività possiamo definire un’altra grandezza molto importante, la costante dielettrica relativa:
r = χ + 1
(31)
P = 0 (r − 1)E
(32)
da cui possiamo scrivere:
In questo modo possiamo scrivere l’induzione elettrica come:
D = 0 E + 0 (r − 1)E =
= 0 r E = E
(33)
dove = 0 r è la costante dielettrica complessiva del mezzo.
Il legame tra l’induzione elettrica ed il campo elettrico è una delle relazioni costitutive del mezzo. Parleremo ora dei
diversi tipi di materiali dielettrici che si possono descrivere grazie a tale relazione costitutiva. La relazione da noi
scritta, in cui cioè è un valore scalare, vale solo per i mezzi lineari, stazionari, isotropi, omogenei, non dispersivi
nel tempo e non dispersivi nello spazio. Vedremo ora come si modifichi tale relazione quando cade ognuna di queste
ipotesi. Per i mezzi non lineari il legame tra P ed E diventa, ovviamente, non lineare:
P = f (E)
(34)
Quindi anche il legame tra D ed E diventa non lineare. Non esiste alcuna generalizzazione semplice che possa
essere ricavata in questo caso. Nel caso di mezzi lineari e anisotropi la costante diventa una diade e la relazione
costitutiva diventa:
D = · E
Nel caso di mezzi lineari, anisotropi, non omogenei, non stazionari e dispersivi nel tempo:
Z t
D(r) =
(r, t, t0 ) · E(r, t0 ) dt0
(35)
−∞
se tale mezzo è dispersivo nel tempo, ma stazionario, si ha:
Z t
D(r) =
(r, t − t0 ) · E(r, t0 ) dt0
−∞
4
(36)
Vediamo quindi che l’integrale diventa una convoluzione. Notiamo che un mezzo non stazionario è necessariamente
anche dispersivo nel tempo. Se il mezzo è lineare, anisotropo, non stazionario, omogeneo, dispersivo nel tempo e
dispersivo nello spazio, si ha:
Z t Z
(r − r0 , t, t0 ) · E(r − r0 , t0 ) dt0 dτ 0
D(r) =
(37)
−∞
τ0
Infine per un mezzo lineare, anisotropo, non stazionario, non omogeneo, dispersivo nel tempo e dispersivo nello
spazio, si ha:
Z t Z
(r, r0 , t, t0 ) · E(r0 , t0 ) dt0 dτ 0
(38)
D(r) =
−∞
τ0
Tale relazione integrale risulta essere del tutto generale. Notiamo che guardando al materiale come a un sistema
lineare, in cui il campo elettrico sia l’ingresso e l’induzione elettrica sia l’uscita, allora la (r, r0 , t, t0 ) risulta essere
la risposta impulsiva del sistema, ovvero una sorta di funzione di Green.
Riprendiamo ora il caso di un mezzo lineare, isotropo, omogeneo, stazionario, non dispersivo nello spazio, ma
dispersivo nel tempo:
Z t
(t − t0 )E(r, t0 ) dt0
(39)
D(r) =
−∞
Notiamo che questo è un prodotto di convoluzione, quindi considerando le trasformate di Fourier di D, E e ,
potremo scrivere:
D̃(r, ω) = ˜(ω) Ẽ(r, ω)
(40)
Vediamo che il legame, nel caso di mezzi dispersivi, diventa più semplice nel dominio della frequenza. La grandezza
˜(ω) è lo spettro della costante dielettrica, ovvero ci dice quale sia la costante dielettrica alle varie frequenze.
Notiamo che in questo senso tutti i mezzi sono dispersivi nel tempo, perché non esistono mezzi per i quali ˜(ω) sia
costante per qualunque valore di ω (con l’ovvia esclusione del vuoto). Esistono piuttosto degli intervalli di frequenza
in cui alcuni materiali possono essere considerati non dispersivi.
Notiamo ora che la costante dielettrica nel dominio della frequenza è in generale complessa:
˜(ω) = 0 (ω) − j00 (ω)
(41)
dove la parte reale è legata alle proprietà dielettriche e la parte immaginaria alle perdite dielettriche del materiale.
Il fatto che 00 sia legata alle perdite del materiale si può vedere bene dal vettore di Poynting, nel quale j00 andrà
a moltiplicare jPE , dove PE è la potenza elettrica immagazzinata, dando luogo ad un termine reale che, come
sappiamo, nel teorema di Poynting, è legato alle perdite.
Può essere interessante notare un comportamento del tutto analogo nel caso dei mezzi anisotropi. In questo
caso infatti, nel caso di mezzi non dispersivi nel tempo, la densità di energia elettrica immagazzinata si può scrivere
come:
WE =
1
E · ( · E)
2
(42)
Questa forma quadratica del campo rappresenta un’energia, quindi deve essere definita positiva. Si può dimostrare
che questo porta la diade a essere simmetrica1 , ovvero ad avere autovalori reali. Per dimostrare ciò è necessario
anche imporre che l’energia sia una funzione di stato, ovvero che dipenda solo dai valori iniziali e finali e non
dal percorso seguito. Se si considera il dominio della frequenza potremo scrivere la densità di potenza elettrica
immagazzinata come segue:
PE = j
ω
E · (∗ · E ∗ )
2
(43)
Perché il mezzo non abbia perdite dielettriche la parte reale di questo oggetto deve essere nulla. Si dimostra che
questo porta la diade (ω) a essere hermitiana. Se (ω) non è hermitiana il mezzo ha perdite dielettriche e la
potenza, reale, deve risultare positiva perché il mezzo sia passivo, ovvero non generi energia!
1 Hermitiana,
nel caso in cui la diade presenti elementi complessi.
5
3
la suscettività generalizzata
Un’altra importante proprietà della permittività nel dominio della frequenza è quella di rispettare le relazioni di
Kramers-Kronig, ovvero delle relazioni integrali che legano la parte reale e la parte immaginaria della permittività.
Tali relazioni si possono ottenere a partire dalla conservazione dell’energia e dal principio di causalità e sono
quindi del tutto generali. Inoltre, esse non valgono solo per la permittività elettrica, ma per qualsiasi grandezza
che rappresenti la risposta di un sistema a una perturbazione esterna. Cercheremo ora di ottenere alcune di
queste proprietà del tutto generali ragionando su sistemi fluttuanti generici. Infatti, in meccanica statistica, ed
in particolare nella teoria delle fluttuazioni, si hanno una serie di teoremi del tutto generali sulle deviazioni che
una generica grandezza fisica x può presentare intorno al suo valore medio x. In genere queste fluttuazioni sono le
piccole deviazioni che subisce la grandezza fisica quando si trova nello stato di equilibrio. Si possono però trovare
leggi di carattere generali anche in cui un corpo sia sotto l’influsso di una forza esterna, e quindi non in uno
stato di equilibrio. In questo caso ci si riferisce a quelle grandezze fisiche che possono essere descritte, all’interno
nell’operatore di Hamilton, da un operatore avente la seguente forma:
V̂ = −x̂f (t)
(44)
dove V̂ è l’operatore, relativo alla grandezza fisica, che perturba l’Hamiltoniana, x̂ è l’operatore relativo alla
grandezza fisica sottoposta alle fluttuazioni ed f (t) è grandezza esterna, dipendente dal tempo, che sta perturbando il sistema (la quale non deve necessariamente avere le dimensioni di una forza). Per legare subito il presente
discorso alla teoria dell’elettromagnetismo, notiamo che la grandezza fisica x può rappresentare il dipolo elettrico e
la ’forza’ esterna f il campo elettrico E(t). In questo caso, l’energia potenziale classica assume la forma V = pE(t),
quindi, per il ben noto teorema della meccanica quantistica, si può scrivere V̂ = −p̂E(t). Ciò detto proseguiamo
con il formalismo generale in (44). In presenza della perturbazione, il valor medio x della grandezza fisica x sarà
diverso da zero e può rappresentarsi come il prodotto di un operatore α̂ per l’azione esterna f :
+∞
Z
x(t) = α̂f (t) =
α(τ )f (t − τ )dτ
(45)
0
L’operatore α̂, esattamente come α, dipendono dalle proprietà del corpo. α può essere uno scalare, od un tensore,
a seconda di tali proprietà. A questo punto sottolineiamo un fatto di fondamentale importanza: l’integrale (45)
è esteso solo tra 0 e +∞, in quanto la risposta del corpo può dipendere solo dai valori assunti dall’azione esterna
negli istanti precedenti all’istante t che si sta considerando, ovvero la risposta del corpo non può dipendere da ciò
che avverrà nel futuro. Questo è un modo di esprimere il principio di causalità, il quale viene assunto come ipotesi
del presente modello. Notiamo inoltre che l’equazione (45), presuppone che la risposta del sistema sia lineare, dato
che si suppone che l’operatore α̂ non dipenda dalla forza esterna. Questa ipotesi è già più forte della precedente,
infatti sappiamo bene che in elettromagnetismo i materiali non lineari sono tutt’altro che rari, soprattutto quando
si considerano ampiezze dei campi esterni molto elevate rispetto alle energie di equilibrio del sistema. Notiamo
infine che nella teoria dei sistemi l’equazione (44) può rappresentare la risposta di un qualsiasi sistema lineare e
causale ad una perturbazione esterna. Quanto stiamo per definire e dimostrare, quindi, ha validità generale per un
qualsiasi sistema di questo tipo.
Notiamo che l’integrale in (45) è un integrale di convoluzione, quindi trasformando ambo i membri secondo
Fourier si ottiene:
x(ω) = α(ω)f (ω)
(46)
dove le grandezze in (46) sono ovviamente le trasformate di Fourier delle grandezze in (45). In particolare si avrà:
+∞
Z
α(ω) =
α(t)eiωt dt
(47)
0
La grandezza α(ω) è detta suscettività generalizzata e determina completamente il comportamento del corpo sotto
l’azione di una data perturbazione.
La suscettività generalizzata è una funzione complessa e potremo scrivere:
α(ω) = α0 (ω) + iα00 (ω)
6
(48)
dalla (47), si vede subito che vale:
α(−ω) = α∗ (ω)
(49)
dalla quale, con la (48), si vede che α0 è una funzione pari della frequenza, mentre α00 ne è una funzione dispari.
Notiamo subito che, essendo una funzione dispari, α00 in ω = 0 può avere solo due comportamenti, o essere nulla,
o tendere all’infinito. Notiamo che le proprietà (48) e (49), dipendono esclusivamente dal fatto che la risposta del
sistema x deve mantenersi reale per ogni azione esterna f reale.
La risposta del sistema, sarà finita per ogni azione esterna finita, quindi la suscettività deve tendere ad un valore
costante quando ω → ∞ (altrimenti l’anti-trasformata di Fourier non sarebbe definibile). Supporremo qui che tale
valore sia nullo, ovvero α∞ = 0. Nel caso in cui tale valore sia diverso da zero, la trattazione subisce variazioni
minime.
Cercheremo ora di capire come la dissipazione dell’energia sia legata alla suscettività. Come è ben noto, le
variazioni dello stato di un corpo sotto l’azione di una forza esterna sono sempre accompagnate dall’assorbimento
di una parte dell’energia (secondo principio delle termodinamica). Tale dissipazione può essere scritta in funzione
del valore medio dell’operatore di Hamilton. In generale la variazione dell’energia si può esprimere come segue:
dE
=
dt
∂H
∂t
(50)
la quale è ragionevole pensando all’espressione dell’operatore di Hamilton nel caso di un sistema stazionario [?]. La
media temporale dell’espressione (50) fornisce l’energia dissipata dal sistema. Tale espressione è di fondamentale
importanza, infatti se si dispone dell’espressione per la variazione temporale dell’energia, tramite la (50) si può
risalire alla perturbazione che funge da azione esterna. Dato che l’unica perturbazione aggiunta all’operatore di
Hamilton dell’equilibrio è quella in (44) e visto che l’Hamiltoniana di equilibrio è, ovviamente, indipendente dal
tempo, potremo scrivere:
dE
=
dt
∂ V̂
∂t
!
= −x
∂f
∂t
(51)
Supponendo che l’azione esterna sia puramente monocromatica, potremo scrivere2 :
1 −iωt
f (t) = Re f0 e−iωt =
f0 e
+ f0∗ eiωt
2
(52)
la quale, inserita in (45), fornisce:
x(t) =
1
α(ω)f0 e−iωt + α∗ (ω)f0∗ eiωt
2
(53)
Inserendo (52) e (53) in (51), si ottiene la seguente espressione:
dE
iω 2 ∗
=
|f0 | (α − α) + 2 αf02 e−2iωt − α∗ f0∗2 e2iωt
dt
4
(54)
I termini armonici si annullano quando si opera la media temporale, quindi l’energia dissipata sarà:
Q=
ω 00
α (ω)|f0 |2
2
(55)
Vediamo quindi che le caratteristiche di assorbimento del corpo sono contenute nella parte immaginaria della
suscettività. Siccome ogni processo fisico deve essere dissipativo, ne deduciamo che la parte immaginaria della
suscettività deve essere strettamente positiva.
Ora siamo in grado di ottenere delle relazioni del tutto generali per la suscettività generalizzata. Andiamo
a dimostrare le relazioni di Kramers-Kronig. Consideriamo la funzione complessa α della variabile complessa ω.
Dall’espressione (47), vediamo che l’integrale contiene il termine exp[−ω 00 t], siccome la funzione α(t) è per definizione
finita per ogni t, ne segue che per ω 00 > 0, l’integrale è sempre convergente e quindi la funzione α(ω) non è mai
singolare ed è monodroma. Quindi la funzione complessa α(ω) non ha punti singolari nel semipiano superiore.
2 Tale ipotesi non è in alcun modo restrittiva in quanto qualunque forza esterna si potrà sempre scrivere come sovrapposizione di
termini monocromatici e, vista la linearità del sistema, ognuno di questi termini potrà essere trattato singolarmente
7
Sul semipiano inferiore questo non è detto, infatti l’esponenziale diventa crescente e la funzione α(ω) potrebbe
presentare dei punti di singolarità. Inoltre, la relazione (49) può essere generalizzata:
α(−ω ∗ ) = α∗ (ω)
(56)
dalla quale troviamo che la funzione α è puramente reale sull’asse immaginario iω 00 . É ora possibile dimostrare che
tale asse è l’unico luogo geometrico dove la funzione assuma valori puramente reali e che ivi è monotona decrescente
in ω 00 ∈ [0, +∞]. Per dimostrarlo si considero il principio dell’argomento di Cauchy:
I
f 0 (z)
2πi (P − Z) =
dz
(57)
C f (z)
dove N e Z sono rispettivamente il numero di poli e di zeri che sono contenuti nel percorso chiuso C . Possiamo
allora scrivere:
I
dα 1
dω
(58)
2πi (P − Z) =
dω
α−a
C
dove a è un numero reale e P e Z rappresentano il numero di poli e zeri della funzione α − a. Si consideri,
come contorno C , l’asse reale chiuso con la semicirconferenza all’infinito nel semipiano superiore, percorso in senso
antiorario. Supponiamo, per ora, che α assuma in 0 un valore finito α0 . Abbiamo dimostrato poco sopra che α non
ha poli nel semipiano superiore, quindi P = 0. Rimane quindi Z, il quale rappresenta il numero di zeri di α − a,
ovvero il numero di volte che la funzione α assume il valore reale a. Riscriviamo l’integrale (58), come segue:
I
1
2πiZ =
dα
(59)
α
−
a
0
C
dove C 0 è la trasformazione conforme del percorso C , secondo la trasformazione α(ω). Sappiamo che sulla semicirconferenza all’infinito nel semipiano superiore, α è sempre nulla, quindi tale porzione del percorso C , collassa
nell’origine del piano di α. Vediamo ora come si trasforma l’asse reale. L’origine si trasforma nel punto, sull’asse
reale del piano di α, α0 . Notiamo ora che 0 ed α0 sono le uniche intersezioni del percorso con l’asse reale, infatti abbiamo detto prima che, per frequenze reali α è sempre un numero complesso, in virtù del fatto che ogni
mezzo è dissipativo. Inoltre, i valori assunti in uno dei semiassi reali di ω saranno complessi coniugati con quelli
assunti sull’altro semiasse. Ne segue che i due semiassi si trasformano in curve molto complesse, ma giacenti in due
semipiani diversi del piano di α, una nel semipiano superiore e l’altra nel semipiano inferiore, senza mai intersecare
l’asse reale. C 0 , sarà quindi una curva chiusa, intersecante l’asse reale del piano di α in due punti. Se il numero a
giace nell’intervallo [0, α0 ], quindi è aggirato una volta dal percorso chiuso, il numero di zeri risulta uguale ad 1,
altrimenti, se a > α0 , è nullo.Questo vuol dire che il numero complesso α assume una sola volta ogni valore reale
a ∈ [0, α0 ]3 . Si può quindi dedurre prima di tutto che sull’asse immaginario del piano di ω la funzione reale α(iω 00 )
non ha né massimi, né minimi, altrimenti si troverebbe ad assumere due volte lo stesso valore reale. Quindi su tale
asse la fnzione α è monotona decrescente, andando dal valore massimo α0 , per ω = 0, al valore minimo 0, quando
α → ∞. Vediamo inoltre che su tale asse vengono assunti tutti e soli i valori reali che può assumere il numero
complesso α.
Nel caso in ω = 0, α assumesse un valore tendente ad infinito, la dimostrazione precedente si potrebbe ripetere in
modo similare considerando al solito una circonferenza di raggio infinitesimo intorno allo zero e facendo poi tendere
questo raggio a zero. Contemporaneamente, sul piano di α ci sarebbe un’intersezione con l’asse reale per un valore
molto grande di α, valore che tende all’ininito quando il raggio tende a zero. Cosı̀ si giunge alla stessa conclusione,
solo che α risulta monotona decrescente nell’intervallo α ∈ [0, ∞].
Ricaviamo ora le formule di dispersione di Kramers-Kronig. Si consideri il seguente integrale:
I
α
dω
(60)
C 0 ω − ω0
dove ω0 è un numero reale e C rappresenta nuovamente un percorso chiuso formato dalla circonferenza all’infinito,
nel semipiano superiore, e dall’asse reale con esclusione del punto ω0 ed eventualmente dell’origine, nel caso α fosse
ivi singolare. Abbiamo dimostrato che α è nullo all’infinito, e la funzione integranda va a zero sulla circonferenza
all’infinito ancora più velocemente. Inoltre, abbiamo dimostrato che α non ha punti singolari sul semipiano superiore,
3 Ogni valore viene assunto una volta sola perché il percorso di integrazione fa un solo giro intorno ad a, e quindi lo zero è sempre
singolo
8
ed avendo escluso anche i punti 0 e ω0 , possiamo concludere che il percorso C non contorna alcun punto singolare
della funzione integranda, quindi, per il primo teorema integrale di Cauchy, l’integrale risulta nulla e possiamo
scrivere:
ω −ρ
+∞
Z0
Z
α
α
dω +
dω − iπα(ω0 ) = 0
(61)
lim
ρ→0
ω − ω0
ω − ω0
−∞
ω0 +ρ
dove abbiamo scritto l’integrale su tutto l’asse reale come l’integrale sull’asse reale ad esclusione di un intorno di
ω0 , più il residuo in ω0 dovuto ad un aggiramento in senso orario. Possiamo quindi scrivere l’espressione della
suscettività, sostituendo i ruoli di ω ed ω0 , come segue:
+∞
Z
1
α(ω) =
iπ
−∞
α(ω)
dω0
ω0 − ω
(62)
dove, ovviamente, l’integrale va inteso nel senso del valore principale. Il che ci permette di legare parte reale ed
immaginaria di α. Infatti è sufficiente separare la parte reale dalla parte immaginaria in (62) per ottenere le seguenti
espressioni:
1
α (ω) =
π
0
+∞
Z
−∞
1
α (ω) = −
π
00
+∞
Z
−∞
α00 (ω)
dω0
ω0 − ω
(63)
α0 (ω)
dω0
ω0 − ω
(64)
Queste sono le relazioni di Kramers-Kronig, ricavate originariamente dal fisico olandese H.A. Kramers e dal fisico
tedesco R.L. Krönig, nel 1927. Va notato che sono state usate pochissime proprietà della suscettività per ottenerle.
In particolare si sono usati i seguenti concetti fisici: la linearità del fenomeno, la causalità e la presenza di perdite
nel fenomeno di fluttuazione. A parte la linearità, che vale solo in alcuni casi e per alcuni valori dell’azione esterna,
le altre due ipotesi vengono generalmente attribuite a qualsiasi sistema fisico, il che rende queste relazione di validità
generale per qualsiasi sistema lineare. Sfruttando il fatto che, per valori reali di ω, le funzione α0 e α00 sono pari e
dispari, rispettivamente, si possono scrivere le relazioni di Kramers-Kronig possono essere scritte nella forma, più
diffusa nella letteratura, seguente:
2
α (ω) =
π
0
α00 (ω) = −
2
π
+∞
Z
ω0 α00 (ω)
dω0
ω02 − ω 2
(65)
ωα0 (ω)
dω0
ω02 − ω 2
(66)
0
+∞
Z
0
Il vantaggio delle espressioni (65) e (66), rispetto alle espressioni (63) e (64), è che le parti reale ed immaginaria
della suscettività vengono valutate solo per valori reali e positivi della frequenza. Quindi vengono utilizzati valori
che possono essere ricavati sperimentalmente.
4
Modelli di Lorentz, Debye e Drude
Vedremo adesso dei modelli che descrivono il comportamento dielettrico di alcuni materiali. Consideriamo un
materiale in cui le singole molecole non siano dotate di dipolo elettrico proprio. Supponiamo inoltre che non vi
siano elettroni liberi, quindi di poter considerare il materiale elettricamente isolante. Il modello che descrive questo
tipo di materiali viene detto Modello di Lorentz. In un mezzo di questo tipo l’azione di un campo elettrico esterno
porta a una deformazione delle molecole, deformazione nella quale la parte positiva delle singole molecole tende a
seguire il verso del campo esterno, mentre la parte negative tende ad allontanarsi dalla posizione di equilibrio nel
verso opposto. Avremo quindi un fenomeno di polarizzazione per deformazione. Il vettore di polarizzazione potrà
essere definito come segue:
P = N er
9
(67)
dove r è la deformazione dovuta al campo elettrico. La forza a cui è sottoposto l’atomo è la forza di Coulomb:
eE. Supponiamo poi che l’atomo eserciti una forza di richiamo, per tornare alla configurazione di equilibrio,
proporzionale allo spostamento: − kr. Supponiamo inoltre che ci sia una forza di smorzamento, dovuta agli urti
con gli altri atomi, che sia proporzionale alla velocità: − β dr
dt . Possiamo quindi scrivere l’equazione di Newton come
segue:
ma = eE − kr − β
dr
dt
(68)
Supponendo lo spostamento parallelo al campo elettrico, potremo riscrivere l’equazione in forma scalare:
dr
d2 r
+ β
+ kr = eE
dt2
dt
(69)
dP
d2 P
+ β
+ kP = e2 N E
2
dt
dt
(70)
m
Moltiplicando tutto per N e si ha:
m
Sfruttando le trasformate di Fourier di E e di P possiamo riscrivere l’equazione come segue
(− mω 2 + jβω + k)P = e2 N E
(71)
da cui:
N e2
E =
− mω 2 + jβω + k
N e2
1
=
E
m (ω02 − ω 2 ) + 2jαω
P =
(72)
dove abbiamo posto:
k
m
β
α =
2m
ω02 =
(73)
(74)
Ricordando che:
P = 0 (r − 1) E
(75)
si ottiene
(ω) = 0 r = 0 + 1
1
(ω02 − ω 2 ) + 2jαω
(76)
con 1 = N e2 /m Estraiamo parte reale e parte immaginaria:
= 0 r = 0 + 1
(ω02 − ω 2 ) − 2jαω
= 0 − j00
(ω02 − ω 2 )2 + 4α2 ω 2
(77)
da cui:
ω02 − ω 2
(ω02 − ω 2 )2 + 4α2 ω 2
2αω
− ω 2 )2 + 4α2 ω 2
0 = 0 + 1
(78)
00 = 1
(79)
(ω02
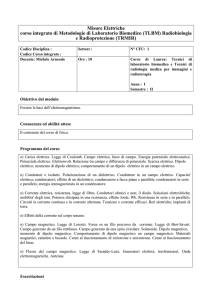
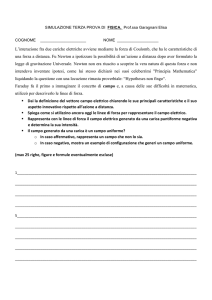
Gli andamenti di 0 e di 00 al variare di ω sono mostrati in Fig. 1 Da questi andamenti vediamo che intorno alla
frequenza ω0 si hanno le massime perdite nel materiale e contemporaneamente la parte reale torna ad assumere valori
prossimi a 0 . Quest’ultimo fenomeno viene detto rilassamento. Notiamo che il comportamento risonante di 00 è alla
base dei processi di riscaldamento a microonde. Un’altra osservazione importante, che vale la pena fare osservando
il comportamento in frequenza della permittività, riguarda i diversi tipi di dispersione. Infatti, soprattutto in ottica,
10
Figure 1: Rappresentazione della parte reale e della parte immaginaria della costante dielettrica in (76). Grafici
eseguiti con Wolfram Mathematica 8.
si parla di dispersione normale nelle zone di frequenza nelle quali la permittività è crescente, mentre si parla di
dispersione anomala nelle zone in cui la permittività è decrescente. Per comprendere il significato di questi termini
è possibile osservare cosa accade alla permittività quando si trascurano le perdite (α = 0). In questo caso la parte
immaginaria risulta identicamente nulla, mentre la parte reale ha un punto di discontinuità di seconda specie in
ω = ω0 , di conseguenze la permittività risulta una funzione sempre crescente. Questo vuol dire che la dispersione
anomala si introduce nel momento in cui si prendono in considerazione le perdite del materiale.
Un altro modello molto importante è il Modello di Debye, modello che descrive il comportamento dei materiali
dotati di dipoli elementari propri. In questo caso quindi la polarizzazione avverrà per orientamento. In questo
caso è possibile seguire gli stessi passi svolti per il modello di Lorentz, con l’unica eccezione di considerare come
incognita dell’equazione differenziale, in luogo della deformazione r, l’angolo di rotazione θ, ovvero l’angolo che il
singolo dipolo elementare forma con la direzione del campo elettrico esterno. Inoltre è necessario fare un’ipotesi,
ovvero che i dipoli ruotino con velocità circa costante. In questo caso è possibile trascurare la derivata seconda
dell’angolo. In questo modo si eliminerà il termine in ω 2 nel dominio della frequenza, e il modello dispersivo della
permittività del materiale potrà scriversi come segue:
(ω) = 0 +
11
1
1 + jτ ω
(80)
dove τ rappresenta la costante di tempo del fenomeno, ovvero ci dice qual è il periodo del campo esterno oltre il
quale la rotazione dei dipoli non riesce a seguire. Riguardo alla rappresentazione della parte reale e della parte
immaginaria, esse sono molto simili a quelle del modello di Lorentz, con l’unica differenza dei picchi in prossimità di
ω0 , infatti tra i due modelli c’è una differenza fondamentale: mentre nel modello di Lorentz, nel caso si trascurino
le perdite si ha ancora un modello dispersivo, nel modello di Debye, se si trascurano le perdite il modello diventa
non dispersivo.
Infine, consideriamo il modello di Drude. Tale modello descrive un materiale in cui siano presenti delle particelle
cariche libere di muoversi. Un tipico esempio è il plasma, in cui il materiale è composto di un gas di ioni liberi. Un
altro importante esempio sono i metalli, nei quali gli elettroni sono liberi di muoversi nel reticolo cristallino.Il moto
degli elettroni in un metallo è un fenomeno molto complesso, che richiede le leggi della meccanica quantistica per
essere correttamente descritto. Il modello di Drude invece, come vedremo, è un modello estremamente semplice.
Ciononostante, il modello che ricaveremo descrive il comportamento dielettrico dei metalli in modo incredibilmente
fedele e in accordo con le verifiche sperimentali. In questo caso possiamo impostare la solita equazione differenziale,
nella quale il termine mancante è quello di richiamo, visto che gli elettroni sono liberi di muoversi. Quindi si avrà:
m
dr
d2 r
+ β
= eE
2
dt
dt
(81)
con passaggi analoghi a quelli svolti per il modello di Lorentz, potremo scrivere, nel dominio della frequenza, la
seguente equazione:
(− mω 2 + jβω)P = e2 N E
(82)
da cui:
(ω) = 0
1−
ω2
ωp2
− jγω
!
(83)
con:
e2 N
0 m
γ = β/m
ωp2 =
dove ωp la cosiddetta pulsazione di plasma. Estraendo la parte reale e la parte immaginaria si ottiene:
!
ωp2
ωp2 γ
(ω) = 0 1 −
−
j
= 0 − j00
0
ω2 + γ 2
ω3 + γ 2 ω
(84)
(85)
(86)
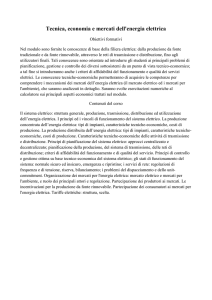
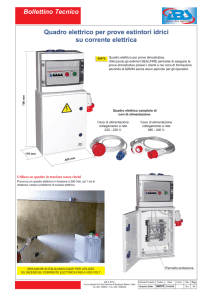
La parte reale e la parte immaginaria della permittività (86) è mostrata in Fig. 2.
Come si pu vedere, la parte reale della permittività assume valori, in modulo, molto elevati a basse frequenze.
Tale zona rappresenta la banda in cui il metallo si comporta da conduttore elettrico perfetto, come è noto infatti,
un conduttore elettrico perfetto pu essere visto come un dielettrico avente una permittività estremamente grande
rispetto alla permittività del vuoto. Al crescere della frequenza, vediamo che la costante dielettrica assume valori
finiti e negativi. Infatti, un plasma o un metallo, a frequenze prossime alla frequenza di plasma si comporta come un
dielettrico con permittività negativa. Un tipico esempio sono i metalli alle frequenze ottiche. Vediamo, infine, che
per frequenze superiori alla frequenza di plasma, il materiale si comporta come un dielettrico ordinario, tendendo
alla permittività del vuoto per frequenze estremamente grandi4 . Per quanto riguarda la parte immaginaria, vediamo
che le perdite del materiale risultano estremamente grandi a basse frequenze e si riducono monotonamente al crescere
della frequenza.
Per finire, vogliamo calcolare la frequenza di plasma per un metallo. In un metallo le cariche libere sono elettroni,
quindi e = 1.6 · 10−19 C, la massa dell’elettrone risulta circa me = 9.1 · 10−31 kg, la costante dielettrica del vuoto
vale ε0 = 8.85 · 10−12 F/m. Per ottenere la frequenza di plasma ci serve a questo punto in numero di atomi per unit
di volume. Per ottenerlo necessario specificare il tipo di metallo. Se per esempio consideriamo l’argento, troviamo
che esso ha un volume molare pari a VM = 1.03 · 10−5 m3 /mol, una mole di argento, quindi, occuper un volume
pari a 1.03 · 10−5 m3 , di conseguenza, il rapporto tra il numero di Avogadro e tale volume ci fornirà il numero di
4 Si ricorda che il modello di Drude un modello elettromagnetico, quindi non tiene conto degli effetti quantistici, i quali divengono
preponderanti a frequenze molto maggiori delle frequenze ottiche.
12
Figure 2: Rappresentazione della parte reale e della parte immaginaria della costante dielettrica in (86). Grafici
eseguiti con Wolfram Mathematica 8.
atomi per metro cubo, N = 6.02 · 1023 /(1.03 · 10−5 ) = 5.85 · 1028 m−3 . A questo punto sufficiente mettere insieme
i valori forniti:
s
r
e2 N
(1.6)2 · 10−38 · 5.85 · 1028
ωp =
=
≈ 1.36 · 1016 rad/s
(87)
0 m
8.85 · 10−12 · 9.1 · 10−31
quindi, la frequenza di plasma dell’argento risulta:
fp =
ωp
≈ 2.2 · 1015 Hz
2π
(88)
Valori sperimentali5 della frequenza di plasma forniscono valori fp = 8.6÷9.6 eV, circa uguale a fp = 2.08÷2.32·1015
Hz. Tenendo conto che il modello di Drude è estremamente semplificato, non prendendo in considerazione né i
fenomeni quantistici, né l’interazione elettrica tra gli atomi, l’accordo con il risultato sperimentale è sorprendente.
5 http://www.wave-scattering.com/drudefit.html
13