Corso di Laurea in Ingegneria Meccanica
a.a. 2008/2009 - III periodo - Prof. A. Passerini
Note di Meccanica Razionale
Nella visione di Laplace (1749-1827), l’apparato formale e teorico della Meccanica Classica permetteva di descrivere l’evoluzione dell’intero universo in modo assolutamente causale e deterministico.
Questo sogno di perfetta predizione del futuro e ricostruzione del passato viene via via nel tempo ridimensionato dall’insorgere di nuove teorie, come la Fisica dei Quanti o la Teoria del Caos. Ciononostante
la Meccanica resta uno straordinario strumento, sempre suscettibile di sviluppi, per tenere sotto controllo il mondo delle cose. Molto piú modestamente, scopo del presente corso è ampliare le conoscenze di
dinamica del punto acquisite in Fisica I allo studio di oggetti piú complessi, quali il corpo rigido e i
sistemi vincolati.
Indice
1 Descrizione geometrica del moto e vincoli olonomi.
1.1 Lo spazio euclideo. . . . . . . . . . . . . . . . . . . . . . .
1.2 Vincoli olonomi. . . . . . . . . . . . . . . . . . . . . . . .
1.3 Gradi di libertà del corpo rigido e definizione di moto piano.
1.4 Calcolo vettoriale. . . . . . . . . . . . . . . . . . . . . . . .
1.5 La velocitá dei punti di un corpo rigido. . . . . . . . . . . .
1.6 I moti relativi e la composizione delle velocitá angolari. . . .
1.7 Classificazione dei moti del corpo rigido ed esempi. . . . . .
2 Dinamica dei sistemi vincolati.
2.1 Introduzione al problema: il punto vincolato.
2.2 Dinamica del punto vincolato. . . . . . . . .
2.3 Il lavoro dei vincoli ideali e delle forze attive.
2.4 Le equazioni di Lagrange. . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2
2
3
5
6
9
11
13
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
15
15
17
20
21
3 Equazioni cardinali, vettori applicati, tensore d’inerzia.
3.1 Le equazioni cardinali della meccanica dei sistemi di punti.
3.2 Sistemi di vettori applicati. . . . . . . . . . . . . . . . . .
3.3 Il baricentro. . . . . . . . . . . . . . . . . . . . . . . . . .
3.4 Asse centrale, invariante scalare, vettori nel piano. . . . . .
3.5 Il momento della quantitá di moto e il tensore d’inerzia. . .
3.6 Tensore d’inerzia e baricentro. . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
24
24
26
28
30
34
38
.
.
.
.
40
40
42
43
45
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4 Dinamica del corpo rigido, libero e vincolato.
4.1 Corpi rigidi vincolati: le equazioni del moto. . . . . . . . . . . . . . . . . . .
4.2 Calcolo delle reazioni vincolari. . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Scrittura delle equazioni di Lagrange in presenza di corpi rigidi. . . . . . . .
4.4 Equazioni del moto del corpo rigido libero e del corpo rigido con punto fisso.
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1 Descrizione geometrica del moto e vincoli olonomi.
1.1 Lo spazio euclideo.
Al fine di descrivere il moto dei punti massivi e dei corpi rigidi richiamiamo alcune proprietà degli spazi
vettoriali.
In quanto segue, i vettori saranno sempre indicati in grassetto ad eccezione dei vettori spostamento:
con
3
X
u = ux i + uy j + uz k =
ui ei ,
(1.1)
i=1
si indica il vettore generico, mentre il vettore spostamento, che indica la posizione di un punto mobile P
osservato da un riferimento con origine in O, si scrive come segue
P − O = xP i + yP j + zP k =
3
X
xiP ei .
(1.2)
i=1
I versori ei , con i = 1, 2, 3, associati a un riferimento levogiro, costituiscono una base ortonormale per
lo spazio vettoriale tridimensionale: l’unico tipo di base utilizzato nelle presenti note.
I risultati ottenuti in Geometria I saranno sempre applicati al caso particolare di basi ortonormali.
Ad esempio, se si cambia terna levogira mantenendo fissa l’origine del riferimento, la matrice del cambiamento di base (che permette di trasformare le une nelle altre le coordinate di uno stesso vettore) sarà
sempre una matrice ortogonale con determinante 1.
La notazione introdotta in (1.2) permette di decomporre un vettore nella somma di altri due (vedi
figura) semplicemente aggiungendo e togliendo un punto, vale a dire
P − O = P − Q + Q − O = (P − Q) + (Q − O) ,
y
6
> P
yQ
1Q
xQ
O
dove
(1.3)
-x
P − Q = (xP − xQ )i + (yP − yQ )j + (zP − zQ )k .
(1.4)
Richiamiamo poi la definizione di prodotto scalare. Esso sarà qui indicato come
u · w = uw cos θ ,
(1.5)
in cui u e w rappresentano la lunghezza dei vettori (invece il modulo dei vettori spostamento si indica
con |P − O|).
Il prodotto scalare permette di calcolare le componenti di un vettore utilizzandone le proiezioni
ortogonali, una volta noti gli angoli αi (i = 1, 2, 3) che esso forma con gli assi coordinati:
ui = u · ei = u cos αi .
(1.6)
poiché i versori degli assi cartesiani sono ortogonali fra loro e cos(π/2) = 0, si ha per i, j = 1, 2, 3
ei · ej = δij ,
2
(1.7)
dove il simbolo di kronecker δij si usa per indicare una quantità che si annulla se gli indici sono diversi,
e vale 1 se sono uguali.
Utilizzando la (1.1), la (1.7) e la proprietà distributiva del prodotto scalare questo può esser scritto in
funzione delle componenti dei vettori nel modo seguente
3
3
3
3
3
X
X
X
X
X
u·w = (
ui ei ) · (
wj ej ) =
ui wj ei · ej =
ui wi = ux wx + uy wy + uz wz . (1.8)
i=1
j=1
i=1
j=1
i=1
Viceversa, note le componenti, si calcola facilmente la lunghezza dei vettori con la
q
√
u = u · u = u2x + u2y + u2z .
(1.9)
Se decomponiamo P − O utilizzando proiezioni ortogonali, la (1.9) si deduce come applicazione del
Teorema di Pitagora al calcolo della diagonale di un parallelepipedo rettangolo (vedi figura). Infatti,
se Q e H sono rispettivamente la proiezione ortogonale di P nel piano xy e di Q sull’asse x, allora la
P − O = (P − Q) + (Q − H) + (H − O) implica
|P − O|2 = |P − Q|2 + |Q − O|2 = zP2 + |Q − H|2 + |H − O|2 = zP2 + yP2 + x2P ,
(1.10)
ove si è applicato il Teorema di Pitagora prima al triangolo rettangolo OQP e poi ad OHQ.
z
6
* P
- y
O
qQ
H
+x
1.2 Vincoli olonomi.
Le nozioni fin qui collezionate ci permettono di introdurre il concetto di vincolo olonomo con un
semplice esempio.
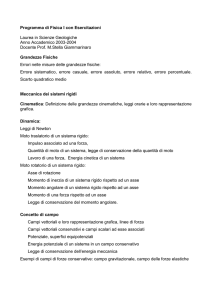
Esempio 1.
Le estremità A e B di un’asta di lunghezza l sono costrette a scorrere lungo due guide rettilinee
ortogonali (vedi figura). Mostriamo ora che il punto medio P dell’asta è costretto a muoversi su una
circonferenza.
Per farlo scegliamo assi cartesiani in direzione delle guide, indichiamo con θ l’angolo che l’asta
forma con l’asse x, e scomponiamo il vettore, ottenendo
P −O =
l
l
cos θ e1 + sin θ e2 .
2
2
Dalla (1.9) scritta per u = P − O e uz = 0, utilizzando cos2 θ + sin2 θ = 1, si ricava l’equazione di una
circonferenza
l2
|P − O|2 =
.
4
Infatti, questa relazione fissa la distanza di P dall’origine, indipendentemente dall’angolo θ, e da come
esso eventualmente varia nel tempo.
3
y
6
A
P
O
B
-x
In realtà, nella situazione descritta dall’Esempio 1, la curva contenente le posizioni ammissibili per
il punto P non è l’unico luogo geometrico che risulta delimitato: servendosi dell’angolo θ è possibile
esprimere la posizione di ogni punto Q dell’asta, una volta che sia nota la sua distanza da uno degli
estremi.
È utile ora osservare come il risultato dell’esempio derivi dall’implicita ipotesi che le guide e l’asta
siano indeformabili, e sia quindi possibile realizzare delle limitazioni geometriche molto precise al moto
di punti o di oggetti: tali limitazioni sono, nel caso particolare, xA = 0, yB = 0 e la condizione di rigidità
dell’asta (xA − xB )2 + (yA − yB )2 = l2 .
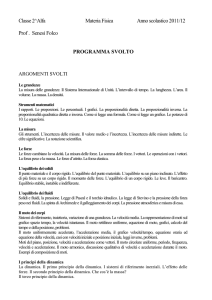
La realizzazione di qualunque limitazione al moto di un sistema avviene tramite dispositivi meccanici
che non sono univocamente determinati. Ad esempio, se si vuole che un punto materiale P appartenga
a una superficie sferica, cioè soddisfi l’equazione x2P + yP2 + zP2 = l2 (con l fissato), si può incollarlo
all’estremità di un’asta di lunghezza l e massa trascurabile, il cui altro estremo sia fisso in O (vedi a
sinistra, in figura). Ma questo non è l’unico modo: si può mettere P all’interno di una cerniera sferica di
raggio l centrata nell’origine (vedi a destra, in figura).
z
6
P
P
O
Φ
O
x
θ
y-
Q
Avvertenza: in tutti i testi si usa la parola vincolo per designare sia l’equazione che il dispositivo.
Pur mantenendo tale consuetudine nelle presenti note, si ritiene utile mettere in guardia il lettore dalla
confusione che essa potrebbe generare.
Diamo ora una definizione che riguarda qualunque sistema meccanico, inteso come insieme di punti
massivi e/o di corpi rigidi.
Definizione 1. Un sistema meccanico si dice soggetto a un vincolo olonomo (bilaterale) quando le
coordinate di uno o più suoi punti devono a ogni istante di tempo soddisfare un’equazione algebrica,
matematicamente indipendente dagli eventuali vincoli di rigidità.
Riportiamo qui un risultato che si apprende nel Corso di Analisi II: per arbitrari interi m ed r, con
m < r, le equazioni fk (y1 , ......, yr ) = 0, in cui k = 1, ..., m, sono indipendenti se la matrice le cui righe
sono i gradienti delle funzioni fk ha rango massimale.
Il sistema dell’Esempio 1 è soggetto a due vincoli olonomi perché le equazioni xA = 0 e yB = 0
sono indipendenti fra loro, oltre che dal vincolo di rigidità.
La trattazione dei vincoli olonomi unilaterali esula dallo scopo di queste dispense.
Fissato un sistema di riferimento, descrivere il moto di un punto significa conoscere la curva
P = (xP (t), yP (t), zP (t))
che ne individua la posizione a ogni istante. Se il punto è vincolato la descrizione risulta semplificata
dal fatto che le coordinate non sono più indipendenti, perché ogni equazione di vincolo può essere usata
per esplicitarne una in funzione delle altre. A questo scopo risulta spesso utile riscrivere l’equazione del
vincolo dopo aver effettuato un’opportuno cambio di variabili nello spazio o nel piano.
4
Esempio 2.
Per studiare un punto che deve muoversi sulla superficie di una sfera di raggio l conviene utilizzare
il cambio di variabili
x = r cos θ sin φ y = r sin θ sin φ z = r cos φ ,
(1.11)
dove r = |P − O|, φ è l’angolo formato da P − O con l’asse z, e, detta Q la proiezione ortogonale di
P sul piano xy, θ è l’angolo che Q − O forma con l’asse x (vedi figura precedente). La corrispondenza
definita in (1.11) è biunivoca se φ ∈ [0, π) e θ ∈ [0, 2π). Nelle nuove variabili l’equazione di vincolo
diventa r = l, e qualunque moto del punto sarà descritto da curve del tipo (φ(t), θ(t)).
Più in generale, un sistema di N punti soggetto a m equazioni di vincolo indipendenti tra loro potrà
sempre venir descritto da sole 3N − m = n variabili. Diremo poi che la configurazione di un sistema
meccanico qualunque è nota quando è nota la posizione di ogni suo punto.
Definizione 2. Indichiamo con n il numero di gradi di libertà di un sistema meccanico, vale a dire
il numero minimo di coordinate sufficienti a individuare la posizione di tutti i suoi punti. Allora, si
dicono coordinate lagrangiane n variabili comunque prese, purché in corrispondenza biunivoca con le
configurazioni possibili per il sistema.
Continuando a riferirci all’asta dell’Esempio 1, il cui grado di libertà è 1, vediamo che una possibile
coordinata lagrangiana è θ. In alternativa, si potrebbero usare come coordinate lagrangiane xA o yB ,
esplicitando θ in funzione di tali variabili, però i calcoli ne risulterebbero appesantiti.
1.3 Gradi di libertà del corpo rigido e definizione di moto piano.
Il corpo rigido si definisce come un sistema in cui la distanza fra ogni coppia di punti si mantiene costante
nel tempo. Il corpo rigido può avere infiniti punti, ma non per questo ha infiniti gradi di libertà. Per
capirlo basta immaginare di attaccare rigidamente a ogni solido, nella posizione che rende più comoda
la descrizione matematica dell’oggetto, una terna levogira detta sistema di riferimento solidale al corpo,
che si muove insieme ad esso. I punti del solido hanno coordinate costanti nel riferimento solidale,
dunque per studiare il moto del solido basta studiare il moto del riferimento solidale.
Teorema 1. Un corpo rigido libero, cioè non soggetto a vincoli, ha 6 gradi di libertà. Eccezion fatta
per le aste che ne hanno 5.
Dimostrazione. Per quanto appena osservato, si tratta solo di dimostrare che per individuare una
terna levogira nello spazio bastano 6 coordinate lagrangiane. Notiamo poi che la posizione della terna è
perfettamente nota una volta che siano note (nel riferimento fisso ovviamente) le coordinate dell’origine
O, e dei punti P1 = O + e1 e P2 = O + e2 . Infatti in tal caso l’orientazione di e3 risulta univocamente
determinata, perché si ottiene applicando la regola della mano destra (o della vite).
Possiamo senz’altro decidere che 3 coordinate lagrangiane sono le coordinate dell’origine del riferimento solidale. Per descrivere l’orientazione del riferimento dobbiamo allora individuare P1 e P2 ,
nell’ipotesi che O sia già stato fissato. Dapprima osserviamo che P1 è vincolato a stare sulla superficie
di una sfera di raggio 1 centrata in O, e quindi bastano 2 coordinate per fissarlo. Infine P2 deve stare
contemporaneamente su due superfici√
sferiche, una centrata nell’origine e l’altra centrata in P1 . Infatti e1 · e2 = 0 implica |P2 − P1 | = 2. Allora il movimento di P2 è limitato all’intersezione fra le
due superfici, che è una circonferenza. E per descrivere una circonferenza è sufficiente una coordinata
lagrangiana. Dunque per l’operazione nel suo complesso è sufficiente utilizzarne 6.
Fa eccezione l’asta perché per individuarne i punti basta un unico asse orientato solidale ad essa,
invece di una terna intera.
Le coordinate usuali per la descrizione delle configurazioni del corpo rigido libero sono le 3 coordinate dell’origine O e i tre angoli di Eulero, la cui definizione esonda però dagli scopi di un corso
introduttivo.
Dal Teorema 1 segue che, i gradi di libertà di un sistema formato da N1 punti materiali e da N2 corpi
rigidi (aste escluse), soggetto a m vincoli olonomi, sono n = 3N1 + 6N2 − m.
5
Nelle applicazioni, anziché studiare il moto dei punti del corpo può risultare comodo studiare il
moto di punti che, pur non appartenendo fisicamente al corpo, hanno coordinate costanti nel riferimento
solidale. Tali punti si dicono punti solidali, e da qui in poi sostituiranno i punti del corpo rigido in ogni
enunciato. Del resto, già nella dimostrazione precedente i punti O, P1 e P2 , solidali per definizione,
avrebbero potuto benissimo non appartenere al corpo.
Nella stragrande maggioranza delle applicazioni che il lettore incontrerà, il corpo rigido sarà soggetto
a tre vincoli olonomi, sempre gli stessi, che nel loro insieme danno luogo al cosiddetto moto piano.
Definizione 3. Un moto piano si realizza quando un punto O solidale a un corpo rigido è costretto
a muoversi su un piano ed esiste un altro punto P solidale al corpo tale che P − O è costante durante
ogni moto.
In effetti, essendo P − O costante in direzione e verso, oltre che in modulo, i punti del corpo si
muovono su curve piane, che si ripetono, congruenti, lungo un fascio di piani paralleli fissi. Per fissare
le idee, in quanto segue porremo sempre P − O = e3 perpendicolare al fascio di piani.
Il moto dell’asta di un orologio a pendolo è, evidentemente, piano, ma anche il moto di una porta
che si apre lo è (si consideri il fascio di piani paralleli normale alla retta passante per i cardini), oppure
il moto di un disco che scivola su una superficie ghiacciata (si consideri il fascio di piani paralleli a tale
superficie).
Non è invece piano il moto di una pallina sull’asta di un pallottoliere (ma lo sarebbe se potessimo
impedire alla pallina di ruotare su se stessa) e nemmeno il moto della terra intorno al sole (ma lo sarebbe
se l’asse della terra fosse normale al piano dell’eclittica; il che non è, come il susseguirsi delle stagioni
testimonia).
Supponiamo di studiare il moto di un corpo rigido in un riferimento fisso con origine nel punto O′
e assi x′ , y ′ e z ′ . Scelta l’origine O del riferimento solidale, il moto piano si impone richiedendo che
valgano le 3 equazioni di vincolo zO′ = c (con c ∈ R), unitamente alle x′P = x′O e yP′ = yO′ .
Una conveniente caratteristica dei moti piani è che per studiarli è sufficiente studiare il moto su un
unico piano, ad esempio z ′ = O, dal momento che esso si ripete identico su ogni piano di equazione
z ′ = c, con c costante arbitraria.
Perciò, per un corpo che si muove di moto rigido piano è sempre possibile scegliere come coordinate
lagrangiane le 3 variabili x′O , yO′ e l’angolo θ che l’arbitrario versore solidale ei (con i = 1, 2 o 3) forma
con il versore fisso e′i al variare del tempo (in figura si è scelto i = 2).
1.4 Calcolo vettoriale.
Introduciamo ora la definizione di prodotto vettoriale u × w. Il risultato del prodotto vettoriale è un
vettore la cui lunghezza è uw sin θ, dove θ è l’angolo che u forma con w (evidentemente il più piccolo
6
dei due, altrimenti il seno non sarebbe positivo). Tale vettore è normale al piano formato da u e w, e
orientato nel verso che vedrebbe spazzare l’angolo θ in verso antiorario per sovrapporre u a w (regola
della vite). Perciò, evidentemente, il prodotto vettoriale è anticommutativo:
u × w = −w × u .
Inoltre, come il prodotto scalare, gode della proprietà distributiva rispetto alla somma:
u × (v + w) = u × v + u × w
E, cosı́ come il prodotto scalare permette di scrivere la relazione di perpendicolarità tra due vettori
tramite la u · w = 0, allo stesso modo il prodotto vettoriale permette di definire il parallelismo tramite la
u × w = 0.
Nel presente corso si utilizzerà assai spesso la formula del prodotto vettoriale in componenti
u × w = (uy wz − uz wy )e1 − (ux wz − uz wx )e2 + (ux wy − uy wx )e3 ,
che corrisponde al calcolo simbolico del determinante
e1 e2 e3 ux uy uz .
w w w x
y
z
(1.12)
(1.13)
La (1.12) può facilmente essere provata nel piano calcolando ad esempio
|(P − O) × (Q − O) | = |P − O||Q − O| sin(α2 − α1 )
=
|P − O||Q − O| sin α2 cos α1 − |P − O||Q − O| sin α1 cos α2 ,
e notando che
xP = |P − O| cos α1 xQ = |Q − O| cos α2 yP = |P − O| sin α1 yQ = |Q − O| sin α2 .
y
6
Q
α2
O
h
:
P
α1
x
-
Il prodotto vettoriale avrebbe potuto essere utilizzato per produrre una definizione alternativa di
riferimento levogiro, tramite una qualunque delle seguenti relazioni
e1 × e2 = e3 ,
e2 × e3 = e1 ,
e3 × e1 = e2 ,
(1.14)
le quali si ottengono l’una dall’altra per permutazione ciclica degli indici. Con l’aiuto delle (1.14), la
(1.12) si può dedurre allo stesso modo di (1.8).
Osserviamo infine che |(P − O) × (Q − O)| è l’area del parallelogramma definito dai due vettori.
Mentre il volume del parallelepipedo definito dai tre vettori u, v e w risulta pari al modulo del prodotto
misto u × w · v. In esso il prodotto scalare deve comunque essere eseguito per secondo (dal momento
che dà come risultato un numero e non un vettore).
7
Per verificare che il prodotto misto misura il volume individuato dai vettori presi come spigoli, è
sufficiente moltiplicare v per il coseno dell’angolo da esso formato con la normale al parallelogramma
definito da u e w, e notare che il risultato di tale proiezione è l’altezza del parallelepipedo relativamente
a quella base (vedi figura).
Utilizzando insieme la (1.8) e la (1.12) si ottiene subito la regola per il calcolo del prodotto misto in
componenti secondo il determinante
vx vy vz ux uy uz .
w w w x
y
z
Le proprietà geometriche del parallelepipedo inerenti al suo volume sono perfettamente riflesse dalle
proprietà matematiche del determinante. Per esempio, il volume si annulla se i tre vettori sono complanari, mentre il determinante si annulla quando una riga è combinazione lineare delle altre due (e, in
particolare, se due righe sono multiple, cioè se due dei vettori sono paralleli). Inoltre, per il calcolo
del volume non ha nessuna importanza l’ordine in cui i vettori vengono presi. Parallelamente il modulo del determinante, cioè il modulo del prodotto misto, non cambia permutando le righe. Infine, per
permutazioni cicliche delle righe non cambia neppure il segno del determinante (e quindi del prodotto
misto).
Il prodotto vettoriale, il prodotto misto e le loro proprietà si utilizzano molto spesso, e si può vedere
da subito come.
La prima applicazione del prodotto vettoriale consiste nella descrizione sintetica del vettore velocità
in un moto circolare (non necessariamente uniforme) secondo la
vP = ω × (P − O) ,
(1.15)
in cui ω ha il verso che vede il punto muoversi in senso antiorario (vedi figura) e modulo ω = |θ̇|.
~ 6
ω
~vP
y
O
θ
P
Osserviamo ora che per definizione vP := d/dt(P − O) con O punto arbitrario purché fisso. Se
d
definiamo un moto centrale come un moto in cui aP := dt
vP è sempre parallelo a P − O, possiamo
usare le proprietà del prodotto misto per provare che la traiettoria di un punto che si muove di moto
centrale è una curva piana.
Esempio 3.
Supponiamo dunque che l’accelerazione soddisfi la
0 = aP × (P − O) .
8
Allora, poiché la regola per la derivata del prodotto di funzioni vale anche per i prodotti vettoriali
(omettiamo la dimostrazione, semplice ma noiosa), si deduce subito la
0=
d
(v × (P − O)) − vP × vP ,
dt P
dove il secondo termine è banalmente nullo. La relazione continua a valere se moltiplicata per un numero
qualunque, per esempio per la massa m del punto P , e ci garantisce che esiste un vettore costante nel
tempo, il momento angolare L(O) rispetto al punto O, tale che
(P − O) × mvP = L(O)
a ogni istante di tempo. In base alle proprietà del prodotto misto, moltiplicando ambo i membri di
quest’equazione scalarmente per P − O si ottiene
0 = L(O) · (P − O) .
Quest’ultima equazione può venir riscritta in coordinate scegliendo O come origine del riferimento, e
diventa la
L(O)x xP + L(O)y yP + L(O)z zP = 0 ,
che è la tipica equazione di un piano per l’origine.
Naturalmente, non tutti i moti che si svolgono in un piano sono centrali; basti pensare alla parabola
descritta da un grave lanciato con velocità orizzontale diversa da zero.
1.5 La velocitá dei punti di un corpo rigido.
Consideriamo la descrizione del moto di un punto P appartenente a un corpo rigido libero fatta da
un’osservatore fermo in una terna con origine in O′ . Al solito indichiamo con O il punto, in generale
mobile, scelto come origine della terna solidale al corpo rigido. L’osservatore fisso, quando misura la
velocità di P , potrà scrivere
vP =
d
d
d
d
(P − O′ ) = (P − O) + (O − O′ ) = vO + (P − O) ,
dt
dt
dt
dt
(1.16)
dove, val la pena di ripeterlo, O può essere un qualunque punto del corpo rigido (o rigidamente collegato
ad esso).
L’ultimo termine a destra nella (1.16) non è la velocità di P perché O è un punto mobile (e quindi
P − O non è un vettore posizione); quel termine è semplicemente la derivata di un vettore solidale al
corpo. Studiando l’azione della derivata temporale, pensata come funzione lineare definita nello spazio
vettoriale dei vettori solidali si prova il seguente fondamentale teorema sul moto dei corpi rigidi.
Teorema 2. Presi due qualunque punti solidali a un corpo rigido esiste un vettore ω per cui
vP = vO + ω × (P − O) .
(1.17)
Il vettore ω può dipendere dal moto dell’osservatore, ma non dipende nè dalla scelta dei punti P ed O,
nè dal particolare riferimento levogiro sui cui assi si decida di proiettare la (1.17).
Dimostrazione. Tenendo conto della (1.16), si tratta di dimostrare che
d
(P − O) = ω × (P − O) .
dt
(1.18)
A questo scopo proveremo innanzitutto che fissato un’istante di tempo, la derivata temporale è una
funzione lineare T antisimmetrica se definita nello spazio dei vettori solidali. Per farlo, basta provare
9
che la matrice i cui elementi sono Tij = ei · T (ej ) e che rappresenta T in una base ortonormale, è una
matrice antisimmetrica, cioè Tij + Tji = 0 per i, j = 1, 2, 3.
Per dimostrarlo basta derivare rispetto al tempo la (1.7):
0=
d
d
d
(ei · ej ) = ej · ei + ei · ej .
dt
dt
dt
Ora si può provare che per ogni operatore antisimmetrico esiste un vettore, che indicheremo con ω, tale
che
T (u) = ω × u .
(1.19)
A questo scopo notiamo in primo luogo che per scrivere la matrice rappresentativa di T sono sufficienti
tre parametri indipendenti, infatti essa deve necessariamente essere del tipo
0
T12 T13
−T12
0
T23 ,
−T13 −T23 0
e la (1.19) diventa un’identità ponendo ωx = −T23 , ωy = T13 e ωz = −T12 . Se poi si applica la (1.19) al
caso u = (P − O) e si sostituisce il risultato nella (1.18), si vede che la (1.17) è vera per ogni coppia di
punti solidali.
La dimostrazione non è tuttavia terminata, non essendo scontata l’ultima parte dell’enunciato, ove si
afferma che ω, una volta individuato, non dipende dal riferimento levogiro e quindi, in particolare, non
dipende dall’orientazione degli assi. Per comprendere cosa dev’essere ancora provato basta osservare
che i numeri ωx , ωy e ωz non sono stati definiti come componenti di vettori ma come elementi di matrice. Occorre dunque provare che, nel corso di un cambiamento di base, vale per essi la stessa legge di
trasformazione che vale per le componenti dei vettori. In caso contrario, ci ritroveremmo con importanti
limitazioni all’uso della (1.17). In particolare, la somma di due vettori ω1 e ω2 le cui componenti siano
state ricavate in due riferimenti diversi non risulterebbe definita.
Nel programma del corso, questa seconda parte della dimostrazione è facoltativa.
Supponiamo di aver riscritto la (1.19) in una base alternativa {e′i }i=1,2,3 , utilizzando la matrice (Tij′ ),
′ , ω ′ = T ′ e ω ′ = −T ′ , che definiscono il vettore ω ′ .
e ottenendo le relazioni ωx′ = −T23
y
z
13
12
′
Evidentemente, si avrà ω = ω se e solo se ωx′ = ω · e′1 , ωy′ = ω · e′2 e ωz′ = ω · e′3 , cioè
se le componenti del vettore ω nel sistema accentato coincidono con quelle del vettore ω ′ ottenuto fin
dall’inizio in tale sistema. Ci limitiamo qui a dimostrare ωz′ = ω · e′3 , perché la prova è del tutto analoga
per le altre due componenti. Si utilizza la legge di trasformazione delle matrici rappresentative delle
e
e′
i
i
′ ) = M i (T )M i e ci si serve della possibilità di permutare i vettori all’interno del
funzioni lineari (Tjk
jk
e
e′
prodotto misto. Ricordiamo poi che la matrice del cambiamento di base è, nel nostro caso, ortogonale e
ej
che i suoi elementi di matrice si scrivono come segue Me′ = (e′i · ej ). Allora per i, j = 1, 2, 3 vale la
i
′
Tij =
3 X
3
X
k=1 l=1
e′i
· ek Tkl
el · e′j
=
3
X
e′i
k=1
· ek
3
X
l=1
Tkl
e′j
· el
!
=
3
3
X
X
′
′
=
(ei · ek )(ek · T (ej )) =
(e′i · ek )(ek · ω × e′j ) = e′i · ω × e′j .
k=1
k=1
Osserviamo poi che
e′i · ω × e′j = ω · e′j × e′i .
Quindi, usando la prima delle (1.14) e ricordando l’anticommutatività, per i = 1 e j = 2 vale la
′
T12
= −ω · e′3 .
10
′ = −ω ′ la dimostrazione può dirsi terminata.
Essendo però vera anche la T12
z
La (1.18), applicata a dei vettori solidali del tipo Pi − O = ei , con i = 1, 2, 3, fornisce le cosiddette
Formule di Poisson
ėi = ω × ei .
Nel caso di moto piano di un corpo rigido, il vettore ω che compare nella (1.17), e che viene chiamato
velocità angolare, ha un significato fisico analogo a quello illustrato dopo la (1.15) per il moto circolare.
Al fine di riconoscere tale moto, dobbiamo avere il punto di vista di un osservatore per il quale l’origine
del riferimento è in un punto O, comunque scelto purché solidale al corpo, e gli assi sono paralleli a quelli
fissi. Costui, per definizione di moto piano, vede fissi i punti dell’asse z (si noti che il riferimento scelto
non è solidale al corpo, perché in tal caso non si osserverebbe moto). Ne consegue che tale osservatore,
vedendo che tali punti hanno velocità nulla, quando applica la (1.17) può scrivere
vP = ω × (P − Q) ,
dove Q è la proiezione di P sull’asse z.
In effetti, egli vede ogni punto del corpo ruotare intorno all’asse z, perché se e3 è costante allora
ė3 = 0. Ciò implica, in base alla terza formula di Poisson, che ω × e3 = 0. Dunque ω è parallelo a e3 .
1.6 I moti relativi e la composizione delle velocitá angolari.
Per chiarire il significato fisico della velocità angolare di un corpo rigido abbiamo appena introdotto,
di fatto, il problema della correlazione fra due descrizioni dello stesso moto fatte da osservatori diversi.
Intendendo per osservatori diversi due osservatori collocati su riferimenti diversi e in moto relativo fra
loro. Prima di formalizzare la soluzione di tale problema, proponiamo un ulteriore esempio che illustra
quanto il più semplice cambio di osservatore incida sulla traiettoria di un punto, che è l’insieme delle
posizioni da esso occupate durante il moto.
Esempio 4.
Supponiamo che un uomo, in piedi su un treno che si muove con velocità costante u lungo una rotaia
rettilinea, si lasci cadere di mano una pallina. E ne descriva il moto considerando la propria mano come
origine O del riferimento, l’asse y rivolto verso il basso, e x diretto come il moto del treno. Il riferimento
si può considerare inerziale e l’unica forza è la forza peso, dunque la traiettoria della pallina è rettilinea.
Infatti, alle condizioni iniziali xP (0) = 0, yP (0) = 0, ẋP (0) = 0 e ẏP (0) = 0 corrisponde la soluzione
xP (t) = 0, yP (t) = gt2 /2. Lo stesso moto ha un aspetto completamente diverso se descritto da un
osservatore fermo sul binario nel punto O′ . Possiamo scegliere gli assi fissi x′ e y ′ paralleli a quelli
mobili, e supporre per comodità che le posizioni dei due osservatori coincidano all’istante iniziale, cioè
O(0) = O′ . Le equazioni differenziali del moto saranno identiche. Ciononostante, poiché l’osservatore
fisso misurerà ẋP (0) = u, le diverse condizioni iniziali producono xP (t) = ut e yP (t) = gt2 /2.
Ricavando t dall’equazione per x e sostituendolo nell’altra equazione si ottiene come orbita la parabola
yP = gx2P /2u2 .
O
e2 ?
OO
?
O
?
P (t1 )
P (t2 )
?
P (t3 )
O′
-u
e1
-
Generalizziamo le nostre considerazioni continuando a indicare con O′ un osservatore che chiameremo fisso, e con O un osservatore mobile, il cui moto sia ora arbitrario. Allora la domanda è: se
11
l’osservatore fisso conosce il moto del riferimento con origine in O, in che modo può evitare di misurare
la velocità vP′ di un generico punto, deducendola invece dalla corrispondente misura vP effettuata da O?
Per rispondere, si prende P mobile per entrambe gli osservatori e si scrive
vP = ẋP e1 + ẏP e2 + żP e3 ,
(1.20)
che è il punto di vista di O. Per tale osservatore infatti O è fisso e la derivata temporale dei suoi versori
è nulla: ėi = 0. Naturalmente, per le componenti di vP si ha ẋP = d/dt(xP − xO ).
D’altra parte, dal punto di vista di O′ sia O che i versori del riferimento mobile hanno una derivata
temporale non nulla. Quindi egli scriverà
3
X
d
d
′
vP = (O − O′ ) + (P − O) = vO
+
dt
dt
′
i=1
d
(x − xiO )ei + (xiP − xiO )ėi
dt iP
.
(1.21)
Poiché il riferimento mobile non è altro che un corpo rigido, l’osservatore in O′ può usare le formule di
Poisson in (1.21) e scrivere ėi = ω × ei , per i = 1, 2, 3. Poi può mettere in evidenza ω, confrontare
l’espressione ottenuta con (1.20), e ottenere infine la legge di trasformazione che gli serve:
′
vP′ = vP + vO
+ ω × (P − O) ,
(1.22)
′
vτ (P ) := vO
+ ω × (P − O)
(1.23)
in cui il termine
è chiamato velocità di trascinamento e, tutte le volte che ω è non nullo, dipende anche dalla posizione
del punto P .
Il tipico esempio di riferimento con velocità angolare diversa da zero è quello dell’osservatore seduto
su una giostra per bambini. Lasciamo al lettore per esercizio il calcolo dell’accelerazione che un tale
osservatore misurerebbe per una pallina di massa m non soggetta a forze, posta sulla piattaforma della
giostra (nell’ipotesi che ω sia costante nel tempo).
Sviluppiamo invece per esteso un ragionamento che, sulla base della teoria dei moti relativi, permette
di definire la somma di due velocità angolari come un vettore che conserva il significato fisico di una velocità angolare. Da tale premessa risulta possibile operare concretamente con velocità angolari associate
a moti anche non piani, basta che i due vettori della somma non siano paralleli.
Supponiamo dunque che il moto di un corpo rigido sia studiato da N osservatori in moto relativo uno
rispetto all’altro. Con ripetute applicazioni successive della (1.22) alla (1.17) si può dedurre una legge di
(1)
(1)
composizione dei moti rigidi. Siano P ed O due punti solidali, vP e vO le velocità misurate dal primo
(1)
osservatore, ω la velocità angolare del corpo rigido misurata dal primo osservatore e O1 l’origine del
(2)
suo riferimento; siano inoltre ω la velocità angolare del primo riferimento (visto come corpo rigido)
(2)
misurata dal secondo osservatore e O2 l’origine del secondo riferimento, v le velocità misurate dal
secondo osservatore, e cosı́ via. Scriviamo ora la (1.17) nel riferimento 1, applichiamo N − 1 volte la
(1.22) e otteniamo
(1)
(1)
vP = vO + ω
(2)
(1)
(2)
vP = vP + vO + ω
(2)
1
(1)
× (P − O),
× (P − O1 ) =
=
(3)
(1)
(2)
2
(2)
1
(3)
vP = vO + vO + vO +
1
(1)
vO + vO + ω
(3)
ω
(2)
× (P − O1 ) + ω
× (P − O2 ) + ω
..
.
12
(2)
(1)
× (P − O) ,
× (P − O1 ) + ω
(1)
× (P − O) ,
(N)
vP
=
N
X
(i)
vO
i−1
+
i=1
N
X
(i)
ω
i=1
× (P − Oi−1 ) ,
(1.24)
in cui per definizione l’N -esimo osservatore è fisso, mentre il riferimento ’zero’ è quello solidale al corpo
(i)
(i)
rigido, e ha origine in O. Inoltre, vO
e ω sono rispettivamente la velocità dell’origine e la velocità
i−1
angolare del riferimento i − 1 misurate dall’i-esimo osservatore.
Se riscriviamo la (1.24) prendendo al posto di O un altro punto solidale Q, e sottraiamo le due
espressioni membro a membro, otteniamo
(N)
vP
− vQ =
N
X
=
N
X
(N)
(i)
ω
i=1
i=1
(i)
ω
× (P − Oi−1 ) +
N
X
(i)
ω
i=1
× (Oi−1 − Q) =
× (P − Oi−1 + Oi−1 − Q) .
Questa formula, dopo aver posto in evidenza P − Q e confrontato il risultato con la (1.17), fornisce la
velocità angolare totale del corpo rigido, infatti
(N)
vP
N
X
(N)
(i)
− vQ = (
ω ) × (P − Q) ,
i=1
e quindi
ω=
N
X
(i)
ω
.
i=1
Per avere un’idea della struttura del vettore ω in un moto non piano sono sufficienti due osservatori,
(1)
di cui uno, mobile, vede il corpo rigido in moto piano con velocità angolare ω e l’altro, fisso, vede
(2)
(1)
l’ossevatore mobile muoversi di moto piano con velocità angolare ω , non parallela a ω .
Ad esempio, un disco giace in un piano verticale e ruota intorno al suo centro con velocità angolare
(1)
ω (orizzontale, perché normale al piano); il centro del disco è fissato nel piano il quale però ruota
(2)
intorno a un asse verticale con velocità angolare ω (verticale, perché diretta come l’asse di rotazione)
(1)
(2)
rispetto all’osservatore fisso. Questi misura per il disco la velocità angolare ω = ω + ω , in cui
(1)
(2)
ω e ω sono perpendicolari e hanno per modulo le derivate di due angoli diversi che variano in modo
indipendente.
1.7 Classificazione dei moti del corpo rigido ed esempi.
Nei due esempi che ci hanno condotto alla derivazione di (1.22), la terna mobile aveva ω = 0 rispetto
alla terna fissa. In realtà si tratta di un caso particolare: quando ω = 0 a ogni istante di tempo, la (1.17)
ci garantisce che tutti i punti del corpo rigido hanno la stessa velocità, e il moto si dice traslatorio. Se ω
si annulla a un solo istante si dice invece che l’atto di moto è traslatorio.
È utile precisare che il moto traslatorio di un corpo rigido non è necessariamente un moto rettilineo.
Ad esempio, se si vincolano le estremità di un’asta rigida a stare su due guide congruenti, curvilinee,
piane, e situate su piani paralleli posti a distanza pari alla lunghezza dell’asta, questa sarà costretta a
muoversi di moto traslatorio, ma le traiettorie dei suoi punti non saranno rettilinee.
Un’altro caso particolare di moto si ha quando a ogni istante t esiste un punto Qt del corpo rigido la
cui velocità è nulla. In tal caso, tutti i punti del corpo rigido soddisfano la (1.15) con Qt al posto di O,
e si dice che l’atto di moto è rotatorio, e Qt è il centro di istantanea rotazione. L’esempio tipico di tale
situazione, che sarà illustrato fra poco, è il rotolamento senza strisciamento.
13
Se, poi, Qt è sempre lo stesso punto del corpo rigido, cioè se esiste un punto fisso che indichiamo al
solito con O, il moto si dice sferico. Un cubo con gli spigoli vincolati a stare su una superficie sferica
fissa si muove di moto sferico. Il termine sferico viene utilizzato al posto del termine rotatorio non per
caso, ma perché in un moto sferico non è detto che le traiettorie dei punti siano circolari. Questo avviene
soltanto quando il moto sferico è anche piano, cioè esiste un intero asse fisso (esempio: lo sportello che
si apre).
Consideriamo ora un disco di raggio r soggetto a un particolare tipo di vincolo detto anolonomo
integrabile. Si tratta di un vincolo sulla velocità dei punti e non sulla loro posizione, che ha però la
particolarità di essere equivalente a un vincolo sulla posizione, a patto che la configurazione iniziale del
disco sia assegnata. L’esempio è necessariamente preceduto da una definizione.
Definizione 4. Si dice che due superfici rigide poste a contatto rotolano senza strisciare l’una sull’altra se un’osservatore solidale ad una di esse vede istantaneamente fermi quei punti dell’altra superficie
che si trovano a contatto con la prima.
Esempio 5.
Il disco in figura rotola senza strisciare lungo una guida rettilinea posta in quiete, e dunque è soggetto
′ = 0. L’asse
anche al vincolo olonomo yO′ = r, oltre che al vincolo di rotolamento senza strisciamento vQ
x della terna solidale forma un angolo θ con l’asse x′ fisso (vedi figura) e ω = θ̇e3 .
′
y
6
y
o
x
O
~v0 O′
>
R
θ
6
Q
′
-x
′ la
Osserviamo che abbiamo a disposizione due espressioni alternative per vO
′
= ẋ′O e′1 ,
vO
e quella derivata da (1.17) imponendo il vincolo di rotolamento senza strisciamento
′
vO
= ω × (O − Q) = θ̇re′3 × e′2 = −θ̇re′1 .
Uguagliandole si ottiene
ẋ′O = −θ̇r
e dunque
x′O (t) = x′O (0) − r(θ(t) − θ(0)) .
(1.25)
L’equazione (1.24) è equivalente a un vincolo olonomo perché permette di eliminare una delle variabili,
per esempio xO , dalla descrizione del moto. E il segno meno sta a indicare che quando θ aumenta il centro
del disco è diretto nel verso negativo dell’asse x′ . L’unica variabile lagrangiana rimasta (ricordiamo che
in un moto piano ce ne sarebbero tre) è θ, che risulta soggetta, come vedremo nel prossimo capitolo, a
un’equazione differenziale dipendente da eventuali forze note agenti sul disco.
Notiamo inoltre che dal vincolo di rotolamento senza strisciamento e dalla (1.17) si può dedurre
immediatamente che il punto P che si trova alla sommità del disco si muove con velocità doppia rispetto
al centro O.
L’atto di moto del disco è rotatorio. Poiché il punto di contatto fra la guida e il disco cambia in
continuazione, il centro di istantanea rotazione non è sempre lo stesso punto solidale. Come conseguenza
di ciò si ha che le traiettorie dei punti non sono circonferenze, pur essendo tangenti a delle circonferenze.
14
2 Dinamica dei sistemi vincolati.
2.1 Introduzione al problema: il punto vincolato.
Richiamiamo le nozioni di dinamica del punto libero apprese in Fisica I e sintetizzate dall’equazione
differenziale vettoriale del second’ordine
maP = F(P, vP , t) ,
(2.1)
la cui incognita è la curva P (t) che contiene tutte le informazioni sul futuro (e anche sul passato) del
punto P , e può essere univocamente determinata date le condizioni iniziali
P (0) = P 0
(2.2)
vP (0) = vP0 .
È da rimarcare l’implicita assunzione che il secondo membro di (2.1) sia una funzione vettoriale nota.
Esempio 6.
Consideriamo un punto posto all’estremità di una molla di costante elastica k, supponendo per
comodità che tale molla abbia lunghezza zero all’equilibrio l’equazione del moto è
maP = −k(P − O) .
(2.3)
Essendo il moto centrale (vedi Esempio 3), la traiettoria è piana. Allora due sole equazioni differenziali
sono sufficienti per studiare il moto, a patto di scegliere l’origine nel punto fisso O e gli assi x e y nel
piano definito dalle condizioni iniziali (1.2). Se per esempio le condizioni iniziali sono
P (0) = (a, 0, 0)
r
k
vP (0) = b
e2 ,
m
si tratta di risolvere le
mẍP = −kxP
mÿP = −kyP .
Si verifica immediatamente per sostituzione diretta che il moto cercato è dato dalle
r
k
xP (t) = a cos
t
m
r
k
yP (t) = b sin
t.
m
E la traiettoria di P è un’ellisse perché vale la
x2P
yP2
+
=1.
a2
b2
(2.4)
Le considerazioni che stiamo per fare parlando di dinamica del punto sono fondamentali, e vanno
intese come valide per ogni sistema meccanico.
Se un punto invece che esser libero è soggetto a un vincolo olonomo lo studio del moto risulta
semplificato solo in apparenza. Le coordinate lagrangiane diminuiscono, ma a secondo membro di (2.1)
v
compaiono anche le reazioni vincolari F . Queste ultime non sono funzioni vettoriali note, essendo
15
nient’altro che le forze occorrenti a mantenere il punto sul vincolo. In un certo senso, esse vengono
introdotte per far tornare i conti. Invece la forza F(P, vP , t) che compare in (2.1) e che è nota, viene
ribattezzata forza attiva e indicata con l’apice a. Allora, l’equazione differenziale del moto diventa
a
maP = F (P, vP , t) + F
v
(2.5)
e risulta indefinita. Si usa dire che non è un’equazione differenziale pura.
Ci troviamo dunque di fronte a due problemi
• trovare un’equazione differenziale pura per poter studiare il moto;
• valutare le reazioni vincolari al fine di costruire (per esempio con materiali adeguati) dei dispositivi
atti a sostenere quel moto.
Entrambi i problemi si risolvono a patto di restringere lo studio a una particolare classe di vincoli, i
vincoli ideali, la cui definizione verrà data fra breve. Si tratta di una categoria di vincoli comunque molto
ampia, in quanto contiene per esempio i vincoli olonomi lisci e anche tutti i rotolamenti, compresi quelli
anolonomi e non integrabili. Tuttavia nel presente corso ci limiteremo a studiare vincoli ideali olonomi,
o al piú anolonomi integrabili.
Un’idea abbastanza generale delle modalità risolutive nel caso di vincoli lisci è data dal seguente
esempio.
Esempio 7.
Scriviamo l’equazione differenziale del moto di un punto pesante, vincolato senza attrito a una circonferenza che giace in un piano verticale fisso. In assenza di vincolo, poiché F = mg, si avrebbe
aP = g = −ge3 , e le soluzioni del problema sono state scritte esplicitamente nell’Esempio 4. Nel
nostro caso l’equazione vettoriale
v
maP = mg + F ,
che ha 3 componenti, va sostituita da un’unica equazione differenziale pura, perché siamo in presenza
dei 2 vincoli olonomi yP = 0 e x2P + zP2 = l2 (vedi figura), che costringono il punto ad avere un solo
grado di libertà.
z 6e
θ
]
O
θ
*er
K
I
P
- x
α
Sia che il vincolo sia stato realizzato con una guida circolare, che tramite un’asta rigida, la mancanza
v
di attrito si traduce nel fatto che la reazione F in (2.5) è normale alla guida. A causa di ciò, moltiplicando
scalarmente ambo i membri dell’equazione vettoriale originaria per un versore tangente alla guida si
ottiene un’equazione pura.
Si può scegliere come coordinata lagrangiana l’angolo θ che P − O forma con l’asse x. Quindi il
versore che risulta tangente alla guida per ogni valore di θ è eθ = − sin θe1 + cos θe3 . D’altra parte la
velocità di P può anche essere scritta come vP = lθ̇eθ . Di qui, tenuto conto che l è costante e usando la
regola di derivazione delle funzioni composte si ottiene la formula
aP = lθ̈eθ − lθ̇ 2 er ,
16
(2.6)
in cui il versore radiale er è dato dalla er = cos θe1 + sin θe3 ,, che vale, tra l’altro, per tutti i moti
circolari.
Sostituendo (2.6) nell’equazione vettoriale, moltiplicando per eθ e tenendo conto che eθ · er = 0, si
ha
mlθ̈ = −mg cos θ .
(2.7)
v
Da ultimo calcoliamo la reazione vincolare F moltiplicando scalarmente l’equazione vettoriale per
er e ricavando
v
F = −mlθ̇ 2 + mg sin θ ,
v
in cui F indica l’unica componente del vettore, il quale ha la direzione dell’asse passante per l’origine
e il verso in direzione uscente.
Scegliendo come coordinata lagrangiana l’angolo α = θ + π/2, la (2.7) assumerebbe la piú nota
forma: α̈ + gl sin α = 0, detta equazione del pendolo semplice, cui si associano le posizioni di equilibrio
α = 0 (stabile) e α = π (instabile). Ricordiamo che si dice di equilibrio una posizione in cui la quiete
rappresentata dalla curva α(t) = 0, è soluzione dell’equazione del moto. Ciò rende la quiete matematicamente possibile. Dalla differenza fra matematicamente possibile e fisicamente osservabile discende
poi l’ulteriore distinzione fra posizioni di equilibrio stabili e instabili, che però non verrà approfondita in
questo corso.
2.2 Dinamica del punto vincolato.
L’Esempio 7 suggerisce la possibilità di ottenere equazioni del moto pure per un punto vincolato moltiplicando scalarmente l’equazione (2.5) per i versori tangenti ai vincoli.
Avvertenza: in realtà, se un punto è vincolato a una curva la reazione vincolare dovrebbe avere in
generale 2 componenti, perché, nello spazio tridimensionale, esistono 2 vettori indipendenti normali a
una curva in un punto dato. Tuttavia se, come nell’Esempio 7, un punto è vincolato a una curva piana e
fissa e le forze attive giacciono nel piano, è naturale aspettarsi che la componente della reazione vincolare
in direzione normale al piano sia nulla. Essenzialmente perché i due versi della normale orientata sono
perfettamente equivalenti dal punto di vista fisico: non c’è ragione perché la reazione vincolare spinga il
piano in un verso piuttosto che nell’altro. Quindi la reazione vincolare normale al piano non c’è.
Cerchiamo ora di stabilire il procedimento generale per studiare la dinamica di un punto vincolato a
una superficie liscia arbitraria. Premettiamo qualche considerazione geometrica.
L’equazione f (xP , yP , zP , t) = 0 che definisce la superficie, eventualmente mobile, e l’appartenenza
del punto P alla medesima, può esser espressa in forma parametrica, esattamente come si fa con le curve
(vedi Analisi II). In pratica, le coordinate cartesiane di P vengono scritte come funzioni di due variabili,
che assumono il ruolo di coordinate lagrangiane. Tali funzioni possono eventualmente dipendere anche
dal tempo, nel caso di superficie mobile.
xP = f1 (q1 , q2 , t)
(2.8)
yP = f2 (q1 , q2 , t)
zP = f3 (q1 , q2 , t) .
Avvertenza: da qui in poi per indicare coordinate lagrangiane arbitrarie scriveremo qi , dove i = 1, ..., n
essendo n il numero di gradi di libertà del sistema meccanico in esame.
Una delle possibili forme parametriche di una superficie si ottiene, ad esempio, ponendo xP = q1 e
yP = q2 , ed esplicitando poi zP nell’equazione f = 0.
v
Se la superficie è liscia, la reazione vincolare F applicata al punto P risulta perpendicolare alla
superficie non solo nel caso del pendolo semplice, bensı́ nel caso generale. Perciò il procedimento
generale che suggeriamo qui richiede di trovare vettori normali e vettori tangenti.
17
Se nelle (2.8) si considera variabile una sola coordinata, per esempio q1 , e si fissano invece le altre
variabili, allora il punto P si muove sulla superficie descrivendo una curva parametrizzata da q1 . Perciò
la derivata rispetto a q1 è tangente a tale curva, e quindi anche alla superficie. Ne consegue che differenziando le (2.8) rispetto alle coordinate lagrangiane si ottengono due vettori tangenti alla superficie e
indipendenti fra loro (non necessariamente ortogonali):
∂P
∂f1 ∂f2 ∂f3
=
,
,
(2.9)
∂q1
∂q1 ∂q1 ∂q1
∂f1 ∂f2 ∂f3
∂P
=
,
,
,
∂q2
∂q2 ∂q2 ∂q2
come si può vedere nel seguente esempio.
y
6
P
1
z
......
....
x
O
Esempio 8.
Possiamo parametrizzare l’equazione della superficie in figura, definita da y = x2 , ponendo x = q1 ,
y = q12 e z = q2 . Allora due vettori tangenti sono
∂P
= (1, 2x, 0)
∂q1
e
∂P
= (0, 0, 1) .
∂q2
Inoltre, posto f = y − x2 un vettore normale è
∂f ∂f ∂f
∇f =
,
,
= (−2x, 1, 0) .
∂x ∂y ∂z
Ora possiamo descrivere la generalizzazione del procedimento utilizzato nell’Esempio 7: a) si moltiplica la (2.5) per ciascuno dei due vettori tangenti in (2.9) al fine di eliminare le reazioni vincolari, si
ottengono cosı́ due equazioni differenziali pure; b) si derivano rispetto al tempo le (2.8) al fine di scriv
vere vP e aP in funzione di qi , q˙i e q¨i , e si sostituisce il risultato in (2.5); c) si calcola F dopo aver
moltiplicato (2.5) per il gradiente della funzione f che definisce la superficie in modo implicito. è noto,
infatti, che il gradiente di una funzione è perpendicolare alle superfici a valori costanti della funzione
medesima. In alternativa, si può moltiplicare per il prodotto vettoriale dei due vettori tangenti. Si noti
v
che F dipende in generale anche dalle q¨i .
Ci si avvicina allora per gradi alla definizione di vincolo ideale, una definizione che deve riflettere la
possibilità di pervenire a un’equazione pura caratterizzando la reazione vincolare con una relazione del
tipo
v
F · vP = 0 ,
(2.10)
18
in cui P è il punto di applicazione della forza e vP è una velocità possibile, compatibile con il vincolo.
La (2.10) è soddisfatta sia da una superficie liscia fissa, perché la velocità è ad essa tangente, che
da un rotolamento descritto da un’osservatore solidale a una delle due superfici, perché in tal caso la
velocità è nulla. Si noti che la (2.10) ha le dimensioni della derivata temporale di un lavoro, cioè di una
potenza. Dunque tale relazione equivale a postulare che, nei casi sopra indicati, la realizzazione delle
limitazioni al moto avvenga senza dissipazione di energia.
Tuttavia la (2.10) potrebbe essere una definizione riduttiva, perché il procedimento risolutivo che
abbiamo precedentemente descritto non richiede che la superficie sia fissa. Come si vede nel seguente
esempio.
P0
ct
-
P (t)
RvP
O
t≪1
Esempio 9.
Si consideri un punto P di massa m non soggetto a forze, ma soggetto alla seguente equazione:
f = x2P + yP2 + zP2 − c2 t2 = 0 ,
che è un vincolo dipendente dal tempo in quanto la derivata parziale di f rispetto al tempo è diversa da
zero. E in effetti descrive l’evoluzione della superficie di un palloncino che si gonfia, con il raggio che
aumenta con velocità c. Se si effettua il cambio di variabili (1.11) dell’Esempio 2, e si pone r = ct,
si vede la superficie del palloncino parametrizzata dagli angoli θ e φ. I due versori tangenti e quello
normale si trovano facilmente e sono
eφ = (cos θ cos φ, sin θ cos φ, − sin φ)
eθ = (− sin θ, cos θ, 0)
er = (cos θ sin φ, sin θ sin φ, cos φ) .
Lasciamo al lettore per esercizio la scrittura delle equazioni del moto nel caso in cui la superficie sia
liscia. Vogliamo invece rimarcare che le velocità possibili non sono tangenti alla superficie. Infatti,
derivando rispetto al tempo le coordinate di P secondo la regola di derivazione delle funzioni composte,
e tenendo presente che θ̇ e φ̇ sono del tutto arbitrarie (almeno all’istante iniziale), si ricava l’espressione
della generica velocità compatibile con il vincolo dato
ẋP = ct(cos θ cos φφ̇ − sin θ sin φθ̇) + c cos θ sin φ
ẏP = ct(sin θ cos φφ̇ + cos θ sin φθ̇) + c sin θ sin φ
żP = −ct sin φφ̇ + c cos φ .
Scomponendo vP secondo i tre versori sopra indicati, si vede immediatamente che esiste una componente
della velocità diversa da zero in direzione normale alla superficie. Infatti, la componente lungo er ha
norma c, come si può facilmente verificare eseguendo (in componenti) il prodotto vP · er .
19
2.3 Il lavoro dei vincoli ideali e delle forze attive.
L’Esempio 9 suggerisce di cercare una definizione di vincolo ideale che si applichi anche nel caso in cui i
vincoli, siano essi lisci o di rotolamento, dipendono esplicitamente dal tempo. Specifichiamo dunque che,
se la superficie è liscia ma non fissa, la (2.10) vale solo a patto di inserire al posto di vP la componente
della velocità in direzione tangente alla superficie. Tale componente, che indichiamo con uP , è quella
che risentirebbe dell’attrito se questo fosse presente.
Notiamo poi che vP in (2.10) risulta essere una velocità possibile, come definita dalla
vP =
n
X
∂P
∂P
q˙j +
,
∂qj
∂t
j=1
e in cui si è utilizzata la regola di derivazione delle funzioni composte.
Avvertenza: la velocità possibile è più generale della velocità reale, in quanto la regola di derivazione delle funzioni composte viene applicata a una qualunque curva compatibile con i vincoli e non
necessariamente a un moto vero, il quale dipende anche dalle forze attive e deve essere soluzione delle
equazioni differenziali del moto.
Allora, per calcolare uP a partire da una curva compatibile con i vincoli basta ignorare la dipendenza
esplicita dal tempo quando si differenziano le (2.8): uP = vP − ∂P
∂t . La componente tangente della
velocità compare nella prima delle seguenti definizioni a patto di porre uj = q˙j .
Definizione 5. Dato un punto P soggetto a vincoli olonomi (e/o anolonomi integrabili), si dice
velocità virtuale di P il vettore
n
X
∂P
u ,
(2.11)
uP =
∂qj j
j=1
in cui la n-upla (u1 , u2 , ..., un ) è arbitraria in Rn .
La definizione più usata in letteratura è applicabile anche a vincoli anolonomi non integrabili e dipendenti dal tempo; in essa si parla di velocità compatibile con i vincoli all’istante fissato e la Definizione
5, che noi abbiamo preferito perché immediatamente applicabile al calcolo, ne è un sottocaso.
Definizione 6. Dato un sistema meccanico a n gradi di libertà, i cui punti Pi , con i = 1, ..., N , sono
soggetti a vincoli olonomi (e/o anolonomi integrabili), si dice che i vincoli sono ideali se la quantità
W=
N
X
i=1
v
Fi · uPi =
N X
n
X
i=1 j=1
v
Fi ·
∂Pi
u ,
∂qj j
(2.12)
detta potenza virtuale delle reazioni vincolari, si annulla per ogni configurazione del sistema e per ogni
n-upla di valori di uj , con j = 1, ..., n.
La potenza reale dissipata W è anch’essa nulla per vincoli indipendenti dal tempo, in quanto in tal
caso la velocità reale soddisfa la Definizione 5. Infatti, l’insieme delle velocità possibili, cui la velocità
reale appartiene, se i vincoli olonomi sono fissi coincide con l’insieme delle velocità virtuali.
Molti libri di testo, al posto delle definizioni date qui, utilizzano lo spostamento virtuale di P , che in
pratica risulta essere
δP = uP dt .
Parallelamente, per definire il vincolo ideale usano la relazione
v
v
δL = F · δP = 0 ,
in cui il termine a primo membro è detto lavoro virtuale delle reazioni vincolari.
Il nucleo di questo capitolo è un importante teorema, che risolve il problema del moto in modo
soddisfacente e del tutto generale definendo le equazioni di Lagrange. Esso permette di studiare il moto
20
di tutti i sistemi meccanici soggetti a vincoli olonomi ideali. Siano essi composti soltanto da punti isolati,
o anche da corpi rigidi continui.
Per comodità, la dimostrazione si riferirà solo a sistemi discreti (leggi: insiemi finiti di punti), ma
essa vale anche se le parti rigide del sistema sono distribuzioni continue di massa. In particolare, nelle
presenti note autorizziamo il lettore a pensare che ogni risultato ottenuto per mezzo di espressioni del
tipo
N
X
mi f (Pi ) ,
i=1
in cui m sta per massa ed f per funzione, valga senz’altro anche nel caso più generale in cui al posto
della somma c’è l’espressione
Z
ρ(P )f (P )dVP ,
V
in cui ρ sta per densità e dVP è il volume infinitesimo che circonda il punto P .
È utile far precedere il teorema da un approfondimento della nozione di forza conservativa introdotta
nel corso di Fisica I.
Definizione 7. Per essere conservativa una forza deve dipendere solo dalla posizione dei punti e non
dalla loro velocità, e non deve avere dipendenza esplicita dal tempo. Inoltre deve esistere una funzione
scalare V , detta energia potenziale, tale per cui
F = −∇V ,
dove il gradiente è calcolato rispetto alle coordinate del punto di applicazione della forza.
Come si può facilmente verificare consultando qualunque testo di Analisi II alla voce ‘forme differenziali esatte’, questa definizione equivale a richiedere che il lavoro fatto per spostare il punto d’applicazione della forza da una posizione A a una posizione B, non dipenda dal percorso scelto per andare da
A a B. Essendo tale lavoro, in effetti, uguale a V (A) − V (B).
Quest’ultima quantità è pari all’incremento di energia cinetica di un punto massivo posto nel punto
di applicazione della forza, a patto che tale punto abbia massa finita. Se la massa è infinitesima, come
nel caso di forze applicate a singoli punti di un corpo rigido, tale proprietà, evidentemente, non vale.
Ma vale comunque il Teorema 4 posto a conclusione del presente capitolo, purché si consideri l’energia
cinetica del corpo rigido nel suo insieme.
Con la Definizione 7, chi non sia in grado di integrare forme differenziali può comunque verificare
che una forza è conservativa, purché gli venga data l’espressione dell’energia potenziale V . A quel punto
basta calcolare il gradiente.
Diamo qualche esempio: se un campo di forze F è costante in ogni punto dello spazio, è immediato
provare che V = −F · (P − O). In particolare, per la forza peso si ha V = mgz se l’asse z è ascendente,
e V = −mgz se è discendente. Inoltre, la forza elastica F = −k(P − O) ammette energia potenziale
Qq
V = 12 k|P − O|2 (sempre positiva), mentre per la forza di Coulomb F =
|P − O|−3 (P − O) si ha
4πǫ
Q
V =
|P − O|−1 .
4πǫ
2.4 Le equazioni di Lagrange.
Dimostriamo ora che i vincoli ideali permettono sempre di scrivere un numero di equazioni pure pari al
numero di gradi di libertà del sistema.
Avvertenza: in presenza di corpi rigidi le modalità di applicazione del teorema che vogliamo enunciare risulteranno chiare soltanto al termine dell’ultimo capitolo. In altre parole: il teorema vale anche
21
per corpi rigidi, ma lo studente non potrà usarlo per risolvere esercizi sui corpi rigidi finché la cinematica
del corpo rigido non sarà completamente nota.
Teorema 3. Sia dato un sistema meccanico a n gradi di libertà, i cui punti Pi , con i = 1, ..., N , sono
a
soggetti a vincoli olonomi ideali (e/o anolonomi integrabili), e a forze attive Fi . Allora fra tutti i moti
compatibili con i vincoli, e quindi descritti da arbitrarie n-uple (q1 (t), q2 (t), ..., qn (t)), quelli realmente
compiuti dal sistema meccanico corrispondono alle soluzioni delle seguenti n equazioni differenziali del
second’ordine
∂T
d ∂T
−
= Qj j = 1, ..., n ,
(2.13)
dt ∂ q˙j
∂qj
dette equazioni di Lagrange, dove le incognite sono le qj (t), mentre
T :=
N
X
1
i=1
2
mi vP2
i
è l’energia cinetica del sistema e
Qj =
N
X
i=1
a
Fi ·
∂Pi
,
∂qj
(2.14)
sono le componenti lagrangiane della forza. L’energia cinetica e le componenti lagrangiane della forza
si intendono calcolate lungo arbitrarie curve compatibili con i vincoli e quindi le vPi appartengono
all’insieme delle velocità possibili. Nel caso le forze siano conservative, le componenti lagrangiane
soddisfano la
∂V
Qj = −
,
(2.15)
∂qj
in cui V è l’energia potenziale del sistema.
Dimostrazione. Scriviamo la (2.5) per ciascuno dei punti del sistema, moltiplichiamola scalarmente
per uPi e sommiamo su i da 1 a N :
n X
N
X
a
v
∂Pi
(mi aPi − Fi − Fi ) ·
u =0.
∂qj j
j=1 i=1
In questa relazione compare la quantità W definita in (2.12) che, poiché i vincoli sono ideali, si annulla.
Si annulla comunque si scelga la n-upla (u1 , u2 , ..., un ), e in particolare per (1, 0, ..., 0), (0, 1, ..., 0),. . . ,
(0, 0, ..., 1). Queste scelte particolari una volta sostituite nell’equazione precedente, in cui si sia già posto
W = 0, producono le n equazioni pure
N
X
a
∂Pi
(mi aPi − Fi ) ·
=0
∂qj
j = 1, ..., n.
i=1
Poiché il secondo termine dentro la parentesi tonda corrisponde alla definizione (2.14), per completare
la dimostrazione resta da provare che
mi aPi ·
∂Pi
d ∂Ti ∂Ti
=
−
,
∂qj
dt ∂ q˙j
∂qj
con Ti = 12 mi vP2 . Per farlo servono due equazioni, caratteristiche dei vincoli olonomi, che ora deriverei
mo.
Dalle (2.9) e (2.8), generalizzate al caso di n gradi di libertà, è immediato dedurre che, essendo
vPi =
n
X
∂Pi
j=1
∂qj
22
q˙j +
∂Pi
,
∂t
valgono le
∂vPi
∂ q˙j
∂vPi
∂qj
∂Pi
,
∂qj
(2.16)
d ∂Pi
.
dt ∂qj
(2.17)
=
=
Allora le (2.16) e (2.17) si possono sostituire nel seguente calcolo
dvPi ∂Pi
∂Pi
= mi
·
∂qj
dt
∂qj
∂Pi
d ∂Pi
·
− mi vPi ·
∂qj
dt ∂qj
mi aPi ·
d
dt
mi vPi
=
=
d
dt
mi vPi ·
∂vPi
∂ q˙j
− mi vPi ·
∂vPi
∂qj
.
Questo è proprio il risultato che cercavamo: per ritrovare l’espressione dell’energia cinetica basta osservare che la regola di derivazione del prodotto si applica anche alle derivate parziali e ai prodotti
scalari.
Sostituendo la generalizzazione delle (2.8) nell’espressione dell’energia potenziale V , l’ultima affermazione del teorema discende banalmente dalla definizione (2.14) e dalla formula per la derivazione
delle funzioni composte (valida anche per derivate parziali). Infatti nel nostro caso tale formula produce
esattamente il prodotto scalare fra il gradiente di V e i vettori tangenti scritti in (2.9).
Esempio 10.
Scriviamo ora le equazioni di Lagrange del sistema meccanico in figura. Tenendo presente che i
vincoli sono lisci, che il piano xy è orizzontale, che la guida su cui scorre il punto B si muove nel verso
positivo dell’asse y con accelerazione costante a, che la molla ha costante elastica k e lunghezza nulla a
riposo e che, infine, A e B hanno entrambi massa m. Supponiamo inoltre, tanto per fissare le idee, che
all’istante iniziale le due guide coincidano e siano in quiete l’una rispetto all’altra.
Scelte come coordinate lagrangiane xA e xB , l’energia cinetica vale
1
1
T = TA + TB = mx˙A 2 + m(x˙B 2 + a2 t2 )
2
2
L’energia potenziale dovuta alla molla è
1
V = k|B − A|2
2
Infatti, indicando con ∇A e ∇B i gradienti rispetto alle coordinate di A e di B, si verifica subito che la
forza FA di cui risente A per effetto di B soddisfa la
FA = −∇A V = −k(A − B) ,
23
e analogamente si trova FB = −FA , come deve essere. Dunque
1
1
V = k[(xB − xA )2 + a2 t4 ] .
2
4
È immediato verificare che le equazioni di Lagrange sono
mẍA = −k(xA − xB ) ,
mẍB = −k(xB − xA ) .
Il lettore può utilizzarle per calcolare la derivata temporale dell’energia totale E = T + V , verificando
che E non è costante. Questo risultato dipende dal fatto che i vincoli non sono fissi. Allora, anche se essi
sono lisci e le forze sono conservative, è necessario fornire energia per mantenere il moto della guida cui
è vincolato B.
Queste considerazioni conducono direttamente all’ultimo risultato di questo capitolo.
Teorema 4. In un sistema meccanico con vincoli olonomi ideali fissi (e/o anolonomi integrabili), sul
quale agiscono forze attive conservative, l’energia E = T + V è costante nel tempo.
dimostrazione. Senza perdita di generalità, possiamo limitarci a considerare un sistema di due punti
a
materiali A e B, per ciascuno dei quali si può scrivere (2.5), con FA = −∇A V e analogamente per
B. Moltiplichiamo allora scalarmente le (2.5) per vA e vB rispettivamente, e sommiamole. Otteniamo
subito
d 1
1
dV
( m1 vA2 + m2 vB2 ) = −(∇A V · vA + ∇B V · vB ) = −
.
dt 2
2
dt
Osserviamo infine che la (2.15) talvolta vale anche se le forze non sono conservative; ad esempio, se
la coordinata lagrangiana è una sola è sempre possibile trovare una funzione energia V : basta trovare la
dV
.
primitiva di Q1 . In tal caso il Teorema 4 vale ancora perché F · vP =
dt
3 Equazioni cardinali, vettori applicati, tensore d’inerzia.
3.1 Le equazioni cardinali della meccanica dei sistemi di punti.
Le equazioni differenziali del moto di un corpo rigido non vincolato devono essere 6, come i gradi
di libertà del sistema. Ricaveremo ora due equazioni differenziali vettoriali, dette equazioni cardinali
(valide in verità per ogni sistema meccanico anche non rigido) che risultano essere equazioni pure nel
caso di un continuo rigido. Con l’espressione ’equazioni pure’ si intendono qui delle equazioni che non
contengono la reazione vincolare incognita teoricamente associabile al vincolo di rigidità nel caso di un
sistema rigido formato da finiti punti, come pure nel caso di un continuo rigido.
Tali equazioni consentono infatti di eliminare, o meglio, non richiedono di esplicitare, l’espressione
di quelle forze che mantengono costante la distanza fra coppie di punti. Queste forze sono di fatto reazioni vincolari, in quanto permettono la realizzazione di quei vincoli di rigidità, evidentemente olonomi,
che hanno consentito di ridurre a 6 il numero di gradi di libertà del corpo rigido.
Come si è visto nel caso di sistemi di punti materiali, eliminare dalla descrizione le forze di vincolo significa pervenire a equazioni differenziali pure, le cui soluzioni descrivono in modo completo
l’evoluzione temporale del sistema.
Senza perdita di generalità, supponiamo dunque di avere un arbitrario sistema meccanico formato da
N punti e scriviamo per ognuno di essi
(i)
(e)
mi aPi = Fi + Fi
dove
(i)
Fi =
X
j6=i
24
i = 1, ..., n ,
Fij
(3.1)
(i)
(e)
In (3.1) le forze sono state suddivise in interne F ed esterne F , anziché attive e vincolari. In parti(i)
colare, si è esplicitato il totale Fi delle forze interne agenti su Pi per effetto degli altri punti Pj . Poiché
per il principio di azione e reazione
N
X
(i)
Fi =
i=1
N X
X
Fij = 0 ,
i=1 j6=i
sommando le (2.13) da 1 a N si ottiene un’equazione in cui non compaiono le forze interne. Posto
P :=
N
X
mi vPi
e
(e)
R
i=1
:=
N
X
(e)
Fi
,
i=1
tale equazione si legge
d
(e)
P=R .
(3.2)
dt
La (3.2) è detta prima equazione cardinale, il vettore P è detto impulso o quantità di moto o momento
(e)
lineare, il vettore R è il risultante delle forze esterne.
Non si può far a meno di notare che se il sistema è un corpo rigido libero le forze interne sono quelle
associate ai vincoli di rigidità. E come qualunque altra reazione vincolare non sono note come funzioni
della posizione e della velocità, ma sono note solo nel loro effetto, che è appunto quello di mantenere
costante |Pi − Pj |. È dunque auspicabile la loro eliminazione dalle equazioni del moto, e le (3.2) sono
per l’appunto equazioni pure per il corpo rigido libero.
Ricaviamo ora le tre equazioni pure che ci mancano moltiplicando le (3.1) vettorialmente per (Pi −O)
(i)
(e)
(Pi − O) × mi aPi = (Pi − O) × Fi + (Pi − O) × Fi
i = 1, ..., n ,
(3.3)
con O punto arbitrario, non necessariamente in quiete rispetto all’osservatore che descrive il moto del
sistema. Sostituiamo poi nel primo membro di (3.3) l’espressione
(Pi −O)×mi aPi =
d d (Pi − O) × mi vPi −(vPi −vO )×mi vPi =
(Pi − O) × mi vPi +vO ×mi vPi
dt
dt
Di nuovo, sommando (3.3) su i da 1 a N il termine che contiene le forze interne si annulla. Questo è
dovuto al fatto che le forze interne, per soddisfare il principio di azione e reazione, non sono solo uguali
e opposte, ma anche dirette come la retta che congiunge la coppia di punti. Dalla proprietà del prodotto
vettoriale di annullarsi se i due vettori sono paralleli, si deduce allora
(Pi − O) × Fij + (Pj − O) × Fji = (Pi − Pj ) × Fij + (Pj − O) × Fij + (Pj − O) × Fji =
= (Pj − O) × (Fij + Fji ) = 0
i, j = 1, ..., N .
Se dopo aver sommato le (3.3) si mettono in evidenza le espressioni
N
X
L(O) :=
(Pi − O) × mi vPi
e
i=1
N
X
(e)
M (O) :=
(Pi − O) × Fi ,
(e)
i=1
che rappresentano rispettivamente il momento angolare totale rispetto al polo O, e il momento delle
forze esterne (sempre rispetto al polo O), possiamo infine scrivere la seconda equazione cardinale della
meccanica nella forma
d
(e)
L(O) = M (O) + P × vO .
(3.4)
dt
25
Per quanto precedentemente osservato, le (3.2) e (3.4) sono da ritenersi a tutti gli effetti le equazioni
del moto del corpo rigido libero, e in questo capitolo ne studieremo in dettaglio la struttura e le proprietà
matematiche.
Come si può forse già intuire, la grande differenza fra dinamica del punto e dinamica del corpo rigido
è insita nella seconda equazione cardinale della meccanica (3.4), che, come vedremo, descrive la parte
rotatoria dei moti.
La struttura dell’equazione è molto complessa, e richiede l’utilizzo di varie proprietà matematiche
delle grandezze vettoriali. Proprietà che devono essere studiate in dettaglio per la loro importanza nelle
applicazioni. Tutte le formule che scriveremo sono di un qualche interesse ingegneristico, perciò non ne
enfatizziamo nessuna in particolare.
In sintesi, esse sono finalizzate alla soluzione di due distinte questioni
• studiare il vettore M(O) come funzione del polo O, per maneggiare nel migliore dei modi il
secondo membro dell’equazione;
• studiare la cinematica del corpo rigido, e in particolare la relazione fra L(O) e ω, vale a dire il
primo membro dell’equazione (3.4).
3.2 Sistemi di vettori applicati.
Cominceremo dallo studio dei momenti delle forze.
È importante rilevare il fatto che nelle equazioni (3.2) e (3.4), viste come equazioni del moto del
(e)
corpo rigido, l’insieme delle forze esterne Fi , applicate nei punti Pi , influenza il moto solo attraverso
(e)
(e)
il suo risultante R , che fa variare nel tempo la quantità di moto, e il suo momento M (O), che fa
variare nel tempo il momento della quantità di moto. Qualunque altro sistema di forze con lo stesso
risultante e lo stesso momento (rispetto a un polo arbitrario) ha il medesimo effetto sul moto del corpo
rigido.
Per ottenere un sistema di forze equivalente due operazioni sono possibili, le quali non alterano nè
R nè M(O):
a) sommare forze applicate in uno stesso punto, o scomporne una nella somma di altre due, applicandole nello stesso punto;
b) spostare il punto di applicazione della forza lungo la retta d’azione della medesima. Essendo la
retta d’azione quella retta che è parallela alla forza e passa per il suo punto di applicazione.
Come si vede anche in figura, dati due punti P1 e P2 sulla retta d’azione, il momento della forza
rispetto ad O soddisfa la
(P1 − O) × F = (P2 − O) × F .
26
Infatti, il prodotto vettoriale è in entrambi i casi normale al piano che contiene la retta d’azione e il
punto O. D’altra parte, l’uguaglianza delle norme si prova richiamando l’espressione per il modulo del
prodotto vettoriale fornita nel Paragrafo 1.4, e verificando che |P1 − O| sin θ1 = |P2 − O| sin θ2 := b.
Il braccio della forza, comunemente indicato con la lettera b, si definisce come la distanza fra la retta
d’azione e la sua parallela passante per O. Come si vede in figura, spostare il punto d’applicazione lungo
la retta d’azione non cambia il braccio della forza.
Alternativamente, per provare che l’operazione b) lascia invariato il momento delle forze si sarebbe
potuto procedere nel seguente (sintetico) modo: se P1 − P2 è parallelo a F, allora
(P1 − O) × F = (P1 − P2 ) × F + (P2 − O) × F = (P2 − O) × F .
A questo punto, nella definizione del vettore momento, si possono sostituire alle forze Fi dei vettori
generici wi , i quali potranno essere di volta in volta forze, quantità di moto dei punti o velocità angolari
di sistemi di riferimento in moto relativo, con diversi significati fisici per le stesse proprietà matematiche.
Significati fisici che saranno illustrati successivamente.
Dato il momento rispetto a P di un sistema di vettori applicati nei punti Pi , con i = 1, ..., N , la legge
di variazione al variare del polo si ottiene come segue
M(P ) =
N
X
i=1
(Pi − P ) × wi =
N
N
X
X
(Pi − Q) × wi +
(Q − P ) × wi =
i=1
i=1
N
X
wi ) = M(Q) − R × (Q − P ) = M(Q) + R × (P − Q) .
= M(Q) + (Q − P ) × (
i=1
Uguagliando il primo e l’ultimo termine della catena, si vede che tale legge è
M(P ) = M(Q) + R × (P − Q) .
(3.5)
Se avessimo scelto come vettori applicati le quantità di moto di N punti di ugual massa mvPi = wi ,
allora il loro momento rispetto al polo P sarebbe stato il momento angolare L(P ) e il risultante la
quantità di moto totale P. Utilizzando nuovamente la (3.5), la legge di trasformazione del momento
della quantità di moto al variare del polo è
L(P ) = L(Q) + P × (P − Q) .
(3.6)
Proprietà 1. Se due sistemi di vettori hanno lo stesso risultante e lo stesso momento rispetto ad un
qualche polo, allora sono equivalenti.
Infatti, in tal caso, i due sistemi hanno lo stesso momento rispetto a qualunque polo a causa della
(3.5).
Due forze uguali e opposte con due rette d’applicazione distinte costituiscono una coppia. In base
alla (3.5), avendo il risultante nullo, una coppia ha momento costante. Scegliendo come polo uno dei
due punti di applicazione delle forze F e −F, si vede che tale momento è in modulo pari a bF . Esistono,
evidentemente, infinite coppie di momento assegnato.
Il più semplice sistema equivalente a un sistema dato si ottiene con il seguente procedimento: applicare in O il risultante del sistema originario, costruire una coppia il cui momento sia pari al momento del
sistema originario rispetto ad O, applicare in O uno dei due vettori della coppia e sommarlo al risultante.
Allora, vale la seguente affermazione.
Proprietà 2. Ogni sistema di forze è equivalente a non più di due vettori applicati.
Vedremo ora che se i vettori sono paralleli, se cioè per ogni i si ha wi = wi e con e versore arbitrario,
il sistema risulta equivalente a un unico vettore.
27
A questo scopo, si definisce il centro del sistema di vettori applicati paralleli come segue
N
1 X
wi (Pi − O) ,
C−O =
R
(3.7)
i=1
con R definito tramite il risultante R = Re e, di conseguenza
R=
N
X
wi .
i=1
Proprietà 3. Se C è il centro di un sistema di vettori applicati paralleli, allora M(C) = 0 e il sistema è
perciò equivalente al risultante applicato in C.
Infatti, applicando la (3.5) si ottiene
N
N
N
X
X
1 X
wi e) × (C − O) = M(O) + (
wi )e ×
wi (Pi − O) =
M(C) = M(O) + (
R
i=1
= M(O) + e ×
i=1
N
X
i=1
wi (Pi − O) = M(O) −
i=1
N
X
(Pi − O) × wi e = 0 .
i=1
Il fatto che il risultante possa essere applicato in C è banale conseguenza di (3.5).
3.3 Il baricentro.
L’esempio più noto di vettori applicati paralleli è dato dalla forza peso mi g applicata ai punti Pi di massa
mi . Semplificando il modulo g dell’accelerazione di gravità nella definizione di centro di un sistema di
vettori, si ottiene la definizione di baricentro
G−O =
N
1 X
mi (Pi − O) ,
M
(3.8)
i=1
in cui M è la massa totale.
Sostituendo gli integrali alle somme, la (3.8) vale anche nel caso di distribuzioni continue di massa
e di corpi rigidi. La (3.8) descrive un luogo geometrico che non dipende dall’orientazione del corpo
rispetto alla forza peso. È chiaro quindi che ai fini del calcolo il sistema di riferimento più conveniente è
sempre un sistema solidale al corpo rigido.
Una proprietà molto utile ai fini del calcolo, e che discende direttamente dalla definizione (3.8), è la
cosiddetta proprietà distributiva del centro di massa G.
Proprietà 4. Se si opera una partizione di un sistema meccanico in N0 sottoinsiemi a due a due
disgiunti (la cui unione sia il sistema di partenza), il baricentro si può calcolare sostituendo al sistema
originario N0 punti di massa Mi pari alla massa delle parti e posti nei rispettivi baricentri parziali Gi ,
con i = 1, ..., N0 .
Nel caso di sistemi discreti l’affermazione è banale, mentre nel caso di corpi rigidi è conseguenza
delle proprietà di additività degli integrali rispetto alla partizione del dominio.
Esempio 11.
G
28
Applichiamo la Proprietà 4 per individuare il baricentro di un triangolo. Cominciamo con l’osservare
che dati due punti di ugual massa il baricentro si trova nel punto medio del segmento che li congiunge.
Inoltre, la mediana relativa a un qualunque lato del triangolo contiene i punti medi dei segmenti paralleli
a quel lato, costituenti una partizione del triangolo. poiché i punti medi sono baricentri parziali e sono
allineati sulla mediana, segue dalla Proprietà 4 e da (3.4) che anche il baricentro totale deve trovarsi sulla
mediana. Ed essendo ciò vero per ogni mediana, il baricentro non può che trovarsi all’incrocio delle
mediane.
Quando nei problemi di Fisica I si studia il moto di un oggetto applicando la forza peso, o addirittura
altre forze, nel baricentro si compie un’operazione che può sembrare arbitraria, finché non si conosce la
teoria dei sistemi di forze applicate equivalenti.
In effetti la prima equazione cardinale (3.2) può essere riscritta tenendo presente che la derivando
(3.8) rispetto al tempo si ha M vG = P, e quindi
M
dvG
(e)
=R .
dt
(3.9)
In particolare, se il risultante delle forze esterne è la forza peso si ha chiaramente G̈ = g.
La relazione M vG = P permette anche di semplificare la seconda equazione cardinale (3.4). Nel
caso in cui il polo è G essa diventa
d
(e)
L(G) = M (G) ,
(3.10)
dt
perché P e vG sono paralleli.
Vedremo ora alcune proprietà che permettono di utilizzare al meglio (3.10) nello studio delle rotazioni di un corpo rigido libero. Nella descrizione di tale moto si utilizza il particolare punto di vista del
cosiddetto osservatore baricentrale, la cui terna ha l’origine nel baricentro del sistema e moto traslatorio
rispetto alla terna fissa. I motivi per cui tale riferimento risulta utile saranno chiari fra poco.
Un’ulteriore conseguenza dell’equazione M vG = P è l’annullarsi di P per ogni osservatore per il
quale G è fermo. E in particolare per ogni sistema di riferimento, comunque orientato, che abbia l’origine
in G. Allora, in base a (3.6) si ha
L(P ) = L(Q) ,
e il momento non dipende dal polo.
D’altra parte non è difficile ricavare la relazione fra il momento angolare L′ (P ) misurato in un riferimento fisso con origine in O′ e assi x′ , y ′ e z ′ , e il momento angolare L(P ) osservato da un riferimento
con l’origine in O e assi x, y e z, che si muove di moto traslatorio rispetto al riferimento fisso. Infatti in
′ e
tal caso, poiché vale la (1.22) con ω = O, la velocità di trascinamento è pari a vO
N
N
X
X
′
′
L (P ) =
(Pi − P ) × mi vP =
(Pi − P ) × mi (vPi + vO
)=
′
i
i=1
i=1
N
X
′
′
= L(P ) + ( (Pi − P )mi ) × vO
= L(P ) + M (G − P ) × vO
,
i=1
in cui l’ultimo passaggio è conseguenza diretta di (3.8) ove si sia scelto O = P . Questa legge di
trasformazione ci assicura che se il polo è G allora L′ (G) = L(G).
Osserviamo poi che per sistemi in moto relativo traslatorio, essendo costanti i versori degli assi, la
legge di trasformazione delle accelerazioni, che si deduce derivando rispetto al tempo la (1.22) scritta
per ω = 0, risulta essere
a′P = aP + a′O .
29
Moltiplichiamo quest’ultima equazione per m e riscriviamo la (2.1) nel riferimento accentato, tenendo
conto che la forza F non dipende dall’osservatore. Otteniamo:
maP = F(P, vP , t) − ma′O ,
in cui l’ultimo termine prende il nome di forza apparente. Questa equazione del moto implica che quando
il punto P viene studiato dall’osservatore mobile O anziché da O′ , esso risulta sottoposto all’azione di
una forza supplementare, la quale, pur chiamandosi forza apparente, ha tutti gli effetti pratici di una forza
reale.
Prendiamo il sistema delle forze apparenti applicate a ciascuno dei punti Pi di massa mi : poiché tali
forze sono parallele e, per la (3.7), il loro centro è G, allora il loro momento rispetto a un punto Q, per
la Proprietà 3, vale (G − Q) × (−M a′O ). E si annulla, quindi, se il polo è G. Allora, se il polo è G e il
riferimento mobile trasla, il secondo membro di (3.10) rimane invariato nel passaggio da un osservatore
all’altro.
L’insieme delle considerazioni fatte a partire dalla (3.10) costituisce la dimostrazione del seguente
teorema
Teorema 5. Scelto G come polo, allora per tutti i riferimenti in moto traslatorio, non necessariamente
uniforme, gli uni rispetto agli altri il momento angolare risulta lo stesso e l’equazione
d
(e)
L(G) = M (G)
dt
è invariante. In particolare, scelto fra questi riferimenti quello con l’origine in G, detto baricentrale,
il momento angolare risulta indipendente dal polo. E l’equazione può essere studiata tenendo presente
che in tal caso l’atto di moto di un corpo rigido è rotatorio intorno al baricentro.
3.4 Asse centrale, invariante scalare, vettori nel piano.
Le relazioni che andiamo a mostrare ora valgono per tutte le funzioni vettoriali, quali ad esempio la
velocità dei punti del corpo rigido oppure i momenti delle forze e della quantità di moto, che soddisfano
equazioni come la (1.17) o la (3.5). Tali funzioni sono chiamate campi vettoriali equiproiettivi, perché
moltiplicando scalarmente la (3.5) per (P − Q) si ha:
M(P ) · (P − Q) = M(Q) · (P − Q) ,
e perciò i due vettori hanno la stessa proiezione lungo la retta che li congiunge. Nel presente paragrafo
indichiamo con M(P ) il generico campo equiproiettivo.
Proprietà 5. Il momento è costante su ogni retta parallela al risultante.
Questo si dimostra scrivendo, in forma parametrica, l’equazione di una retta parallela a R, che passa
per un punto prefissato ma arbitrario che chiameremo Q. Le coordinate variabili di un generico punto P
appartenente a tale retta soddisfano le relazioni
xP − xQ = λRx
yP − yQ = λRy
zP − zQ = λRz
in cui λ è un numero reale. (Per ritrovare la nota equazione implicita di una retta, ad esempio giacente
nel piano xy, è sufficiente ricavare λ dalla prima equazione e sostituirlo nella seconda). Le tre relazioni
sono sintetizzate dall’equazione vettoriale P − Q = λR che, sostituita in (3.5), implica subito M(P ) =
M(Q).
30
Proprietà 6. Se R è diverso da zero, il luogo dei punti in cui il momento è parallelo al risultante è
una retta, parallela al risultante, detta asse del campo.
Questa proprietà si dimostra richiedendo il parallelismo
M(P ) × R = 0 ,
e cercando di provare che sotto quest’ipotesi P soddisfa l’equazione della retta.
Sostituiamo (3.5) nella relazione precedente, e applichiamo poi l’identità
(v1 × v2 ) × v3 = (v1 · v3 )v2 − (v2 · v3 )v1 ,
(3.11)
verificabile con elementari ma noiosi calcoli algebrici.
In questo modo si ottiene subito che la (3.11) permette di scrivere il luogo dei punti P in cui il
momento è parallelo a R come segue
0 = (M(Q) + R × (P − Q)) × R =
= M(Q) × R + R2 (P − Q) − (R · (P − Q))R .
Da qui, si ricava
P =Q−
1
1
M(Q) × R + 2 (R · (P − Q))R .
2
R
R
Poniamo ora
1
R × M(Q) ,
R2
in modo che, in base all’equazione precedente, il punto P variabile e il punto Q∗ fissato soddisfano la
Q∗ = Q +
P − Q∗ =
1
(R · (P − Q))R = λR ,
R2
e quindi appartengono a una stessa retta parallela a R. Allora, se vogliamo completare la dimostrazione
non dobbiamo far altro che provare che anche Q∗ appartiene a quello stesso luogo di punti che stiamo
cercando di caratterizzare. Ma poiché
Q∗ − Q =
1
R × M(Q) ,
R2
applicando la (3.5) alla coppia di punti Q∗ e Q, e usando nuovamente l’identità (3.11) del doppio
prodotto, si calcola
1
∗
∗
M(Q ) = M(Q) + R × (Q − Q) = M(Q) + R ×
R × M(Q) =
R2
1
1
(R · M(Q))R = 2 (R · M(Q))R .
2
R
R
∗
Il che prova, effettivamente, che M(Q ) e R sono paralleli.
Proprietà 7. L’asse del campo è il luogo dei punti in cui il modulo del momento è minimo.
Questo si vede scrivendo la (3.5) quando uno dei due punti appartiene all’asse del campo:
= M(Q) − M(Q) +
M(P ) = M(Q∗ ) + R × (P − Q∗ ) ,
(3.12)
e notando che il secondo membro è somma di due vettori che sono perpendicolari fra loro, per definizione
di asse centrale e per definizione di prodotto vettoriale. Quindi vale la
M (P )2 = M (Q∗ )2 + |R × (P − Q∗ )|2 ,
31
e la proprietà citata discende dal fatto che il primo termine a secondo membro non dipende da P , mentre
il secondo dipende da P e può pure annullarsi.
Proprietà 8. Se la quantità I := M(P ) · R, detta invariante scalare, si annulla, o il campo è costante
o esiste un punto C, detto centro del sistema di vettori, tale per cui
M(P ) = (C − P ) × R ,
(3.13)
per ogni P .
Cominciamo col dire che I non dipende da P , ed è per questo che lo chiamiamo invariante scalare.
Infatti, sostituendo nell’espressione che lo definisce la (3.5), e notando che il prodotto misto si annulla,
si vede che I(P ) = I(Q) per ogni Q. D’altra parte, calcolando I in un generico punto Q∗ appartenente
all’asse si ottiene il prodotto di due numeri I = ±M (Q∗ )R. Per cui se I è nullo o è nullo R, e quindi il
campo è costante, oppure il campo si annulla nei punti dell’asse, e (3.13) diventa immediata conseguenza
di (3.12). In realtà (3.13) vale per tutti i punti dell’asse, anche se siamo soliti indicare con C quel punto
dell’asse che appartiene al piano normale a R per P .
La Proprietà 8 ha alcune importantissime applicazioni.
Esempio 12.
Prendiamo un sistema di forze applicate in un piano, cioè con i punti di applicazione Pi complanari
e le forze Fi complanari esse stesse. La nullità dell’invariante scalare si prova scegliendo come polo
proprio un punto di quel piano, in modo che, per definizione di prodotto vettoriale, il momento risulterà
perpendicolare al piano, e quindi al risultante. Se questo è diverso da zero basterà applicarlo in C, o in
un qualunque punto dell’asse, per ottenere un sistema equivalente a quello di partenza.
Un esempio che trattiamo ora in dettaglio è quello dei moti piani di un corpo rigido. Il campo delle
velocità dei punti solidali al corpo rigido è equiproiettivo a causa della (1.17), in cui il vettore ω gioca il
ruolo fin qui giocato dal risultante. Dunque, in particolare, per il campo di velocità valgono le proprietà
5, 6, 7 e 8. E quest’ultima è soddisfatta dai moti piani.
Infatti, come si deduce dalla Definizione 3 e dalle osservazioni immediatamente precedenti l’Esempio 4, il vettore ω, essendo parallelo a e3 , che è solidale e costante, risulta normale ai piani nei quali il
moto dei punti si svolge, e quindi normale a vP . Perciò
I = vP · ω = 0
In ogni piano esiste allora un punto C, detto centro di istantanea rotazione, che appartiene all’asse del
campo, ha velocità nulla, e per il quale vale l’analogo di (3.13)
vP = ω × (P − C) ,
espressione che denota come i moti dei punti siano tangenti a circonferenze concentriche.
Nel moto piano dell’Esempio 5, per il disco rotolante esiste a ogni istante di tempo un diverso punto
del corpo avente velocità nulla. poiché il punto materiale cambia, il luogo geometrico definito dalla
condizione
vC = 0 ,
(3.14)
può, nonostante le apparenze, essere mobile. E in generale lo è.
Definizione 8. Durante un moto piano in cui l’atto di moto sia sempre rotatorio, la curva descritta
dal centro di istantanea rotazione nel riferimento fisso è chiamata base. La curva descritta da C in un
riferimento solidale è chiamata rulletta.
Nell’Esempio 5, particolarmente semplice, la base è l’asse x, e basta un po’ di immaginazione per
capire che la rulletta è la circonferenza del disco stesso.
Un metodo grafico per individuare il centro di istantanea rotazione è il cosiddetto Teorema di Chasles. Esso si basa sul fatto che i moti sono tangenti a moti circolari, e afferma che, note le direzioni
32
della velocità di due qualunque punti solidali, il centro si trova all’intersezione delle rette passanti per
quei punti e normali alle rispettive velocità. Tale risultato si spiega banalmente ricordando che i vettori
velocità sono tangenti a delle circonferenze concentriche. E ricordando che in una circonferenza la retta
cui il raggio appartiene è perpendicolare alla tangente e passa per il centro del cerchio.
Esempio 13.
y′
y
6
C
A
M
2θ
6
θ
O
θ
B
jx
- x′
Applicando il Teorema di Chasles, si vede che il centro di istantanea rotazione di una sbarra vincolata
come nell’Esempio 1 si trova nell’intersezione della normale per A all’asse y con la normale per B
all’asse x. poiché C − O è disposto come la diagonale del rettangolo OBCA, si ha
|C − O| = l ,
perciò la base è una circonferenza di raggio l. Scegliendo come origine del riferimento solidale il punto
medio P dell’asta è anche chiaro che
l
|C − P | = ,
2
e quindi la rulletta è una circonferenza di raggio l/2. Inoltre, mentre l’angolo che C − O forma con
e′1 è θ, da elementari considerazioni geometriche si deduce che l’angolo che C − P forma con e1 =
(B − P )/|B − P | è 2θ. Quindi, mentre C descrive mezzo giro sulla rulletta, soltanto un quarto di giro
viene percorso sulla base.
Esempio 14.
C
R
θ
O
A
γ
R
α
R
θ
β
α = 2θ
π
β = −θ
2
-
B
=⇒ γ =
π
−θ
2
L’asta AB di lunghezza R in figura, detta biella, ha un estremo vincolato a una circonferenza, di
raggio R, e l’altro a una guida passante per il diametro del cerchio. L’ubicazione di C è data ancora una
volta dal teorema di Chasles. Valutando gli angoli è immediato capire che il triangolo CAB è isoscele
quanto AOB. Perciò la base è la circonferenza
|C − O| = 2R ,
allora la rulletta è, chiaramente |C − A| = R.
Tuttavia, trattando questo tipo di problemi, le curve con cui si ha a che fare non sono in generale semplici come negli esempi precedenti. Però, data la base, la rulletta può sempre essere trovata trasformando
le x′iC (t) trovate dall’osservatore fisso con origine in O′ nelle xiC (t) misurate dall’osservatore mobile
33
con origine in O, secondo il seguente procedimento: scrivere nel sistema fisso le componenti x′iC − x′iO
e′j
del vettore C − O e poi applicare ad esse la matrice del cambiamento di base Me = (ei · e′j ). Tanto per
i
fissare le idee, scriviamo la forma di tale matrice nel caso dell’Esempio 13
cos(−θ) sin(−θ)
.
(3.15)
− sin(−θ) cos(−θ)
Il segno meno davanti all’angolo in (3.15) si deve al fatto che un’osservatore orientato nel verso positivo
dell’asse z vedrebbe e′1 ruotare in senso antiorario per andare a sovrapporsi a e1 .
Studiamo ora la composizione delle velocità angolari in un moto piano. A tal fine, consideriamo una
particolare applicazione di (1.24), quella in cui il corpo e gli N sistemi di riferimento si muovono tutti
di moto piano gli uni rispetto agli altri, avendo in comune il versore e3 dell’asse z. Riscriviamo la (1.24)
supponendo che quando il campo di velocità del corpo è misurato dal primo osservatore, il punto O si
trovi sull’asse di Mozzi, e che le origini Oi stiano sull’asse di Mozzi del riferimento i-esimo mentre il
(i)
suo moto viene osservato dal riferimento i + 1. In questo modo si ottiene vO
= 0 per ogni i, e quindi
i−1
la (1.24) diventa
N
X
(N)
(i)
vP =
(Oi−1 − P ) × ω .
(3.16)
i=1
(N)
In questo modo vP soddisfa la definizione di momento di un sistema di vettori applicati paralleli cal(i)
colato rispetto al polo P . A patto di porre ω = wi , R = ωT , e considerando i punti Oi−1 come se
fossero punti di applicazione.
Allora l’asse di Mozzi del moto composto, che è evidentemente parallelo a e3 , si ottiene individuando
il centro di istantanea rotazione tramite la formula (3.7) che definisce il centro di un sistema di vettori
applicati paralleli.
3.5 Il momento della quantitá di moto e il tensore d’inerzia.
Passiamo ora al secondo argomento fondamentale di questo capitolo, cioè la relazione fra L(O) e ω, e
dimostriamo il seguente teorema.
Teorema 6. Supponiamo che durante il moto di un corpo rigido un punto O solidale al corpo abbia
a un dato istante velocità nulla. Allora se in quell’istante si sceglie O come polo, il momento angolare è
una funzione lineare di ω detta tensore d’inerzia e indicata come segue
L(O) = I(O)(ω) .
(3.17)
Il tensore d’inerzia è simmetrico e la sua matrice rappresentativa in una arbitraria base è data da
11 12 13
IO IO IO
I 21 I 22 I 23 =
O
O
O
31 I 32 I 33
IO
O
O
R
V
ρ(P )(yP2 + zP2 )dVP
R
=
− V ρ(P )xP yP dVP
R
− V ρ(P )xP zP dVP
−
R
V
R
V
ρ(P )xP yP dVP
ρ(P )(x2
−
P
R
V
+
z 2 )dV
P
ρ(P )yP zP dVP
−
−
P
R
V
R
V
R
V
ρ(P )xP zP dVP
ρ(P )yP zP dVP
ρ(P )(x2P + yP2 )dVP
.
(3.18)
Nello scrivere (3.19), in cui P è un qualunque punto del corpo rigido, si è scelto per brevità di porre in
O l’origine del riferimento.
34
Dimostrazione. Ci limiteremo a dimostrare (3.18) per la componente x del momento angolare, perché
le altre due componenti si ottengono in maniera analoga. Vogliamo quindi provare che
11
12
13
L(O)x = IO ωx + IO ωy + IO ωz .
Sostituendo nella definizione di momento angolare la (1.17), in cui però vO = 0, e applicando poi
l’identità (3.11), si ricava
Z
Z
L(O) =
ρ(P )(P − O) × vP dVP =
ρ(P )(P − O) × (ω × (P − O))dVP =
V
V
=
Z
V
ρ(P )[|P − O|2 ω − (ω · (P − O))(P − O)]dVP .
Estraendo la prima componente dai vettori che compaiono in quest’ultima espressione si ha
Z
ρ(P )[(x2P + yP2 + zP2 )ωx − (ωx xP + ωy yP + ωz zP )xP ]dVP =
L(O)x =
V
=
=
Z
2
V
Z
V
2
ρ(P )[(yP2 + zP2 )ωx − ωy yP xP − ωz zP xP ]dVP =
ρ(P )(yP + zP )dVP
ωx −
Z
ρ(P )xP yP dVP
V
ωy −
Z
V
ρ(P )xP zP dVP
ωz ,
come volevasi dimostrare.
Si noti che, se il riferimento in cui si calcolano le componenti del momento angolare è fisso mentre
il corpo si muove, allora gli elementi della matrice (3.19) dipendono dal tempo.
In qualche corso elementare di fisica il lettore potrebbe aver già incontrato, al posto del tensore
d’inerzia, il momento d’inerzia. Esso viene solitamente introdotto considerando un sistema rigido di N
punti massivi in moto attorno a un asse fisso con velocità angolare in modulo pari a ω. In tal caso, scelto
O sull’asse di rotazione, il modulo di L(O) risulta proporzionale alla velocità angolare ω, che essendo
uguale per tutti i punti, può esser posta in evidenza nella relazione che definisce L(O). La costante di
proporzionalità cosı́ ottenuta si chiama momento d’inerzia.
Questo esempio si riferisce essenzialmente a un’equazione scalare: chiariremo ora la relazione fra il
momento d’inerzia e la (3.18).
Definizione 9. Dato un sistema meccanico, la somma dei prodotti fra le masse mi e i quadrati delle
distanze tra i punti Pi e una retta data (che passa per un punto O e ha la direzione del versore n), si dice
momento d’inerzia I(O, n) del sistema rispetto all’asse dato.
11
Considerando distribuzioni continue di massa si vede subito che IO è il momento d’inerzia del
22
33
corpo rigido rispetto all’asse x, come IO lo è per l’asse y e IO per l’asse z. Ciò significa che per
i = 1, 2, 3 il momento d’inerzia rispetto a un asse passante per l’origine e avente la direzione di ei vale
ii
ei · IO (ei ) := IO . L’arbitrarietà dell’orientazione del riferimento cartesiano suggerisce di generalizzare
questo risultato.
A tale scopo osserviamo che, vedi figura, per definizione di prodotto vettoriale la distanza d di P da
una retta per O avente la direzione di n soddisfa la d = |n × (P − O)|.
~n3
d
:P
O α
35
Perciò per definizione
I(O, n) =
Z
V
ρ(P )|n × (P − O)|2 dVP .
D’altra parte, posto ω = n, dalla (3.18) e dai calcoli sviluppati nella dimostrazione precedente discende
la
Z
ρ(P )(P − O) × (n × (P − O))dVP ,
IO (n) =
V
e quindi anche la
n · IO (n) =
Z
V
ρ(P )n · (P − O) × (n × (P − O))dVP .
Ora basta osservare che, essendo per ogni u (vedi Paragrafo 1.4)
n · (P − O) × u = u · n × (P − O) ,
allora per u = n × (P − O) vale la
n · (P − O) × (n × (P − O)) = n × (P − O) · n × (P − O) = |n × (P − O)|2 ,
e di conseguenza, sostituendo quest’espressione in quella di n · IO (n), resta provata la
I(O, n) = n · IO (n) .
(3.19)
La (3.20) permette di calcolare il momento d’inerzia rispetto a un qualunque asse passante per O, nota
che sia la matrice in (3.19). Questa formula, come pure la relazione fra momento angolare e velocità
angolare, risulta più maneggevole in un particolare riferimento solidale, detto terna principale d’inerzia,
che verrà introdotto ora.
La (3.19) vale per qualunque riferimento con l’origine in O, quindi anche in un sistema solidale.
In un riferimento solidale gli elementi di matrice non dipendono dal tempo. Inoltre, in base a un noto
teorema di Geometria sulla diagonalizzazione delle matrici simmetriche, possiamo allora dire che esiste
certamente almeno una base ortonormale, formata dagli autovettori del tensore d’inerzia, in cui la matrice
rappresentativa oltre a verificare (3.19) è diagonale, cioè
A 0 0
IO = 0 B 0 .
(3.20)
0 0 C
Qui A,B e C sono gli autovalori del tensore d’inerzia, che non dipendono dal tempo perchè la matrice
da diagonalizzare non dipendeva dal tempo. Alla base formata dagli autovettori, che indicheremo con i,
j e k, corrisponde fisicamente una particolare terna di assi solidali al corpo rigido detta terna principale
d’inerzia per O. Le componenti del momento angolare nella terna principale d’inerzia hanno una forma
semplice. Infatti la (3.18) diventa
L(O) = Aωx i + Bωy j + Cωz k ,
(3.21)
da cui si vede, tra l’altro, che il momento angolare è parallelo (e quindi multiplo) della velocità angolare
se e soltanto se questa è parallela a un asse principale d’inerzia.
Inoltre, dette nx ,ny e nz le componenti del versore n, la (3.20) diventa subito
I(O, n) = An2x + Bn2y + Cn2z
Vediamo ora qualche elementare regola per individuare gli assi principali d’inerzia.
36
(3.22)
Data una figura piana la matrice d’inerzia in un punto O, appartenente al piano, risulta notevolmente
semplificata se uno degli assi della terna solidale, per esempio l’asse z, è perpendicolare alla figura.
Sostituendo zP = 0 in (3.19), si vede subito che, in tal caso,
11 12
0
IO IO
IO = IO21 IO22 0 ,
(3.23)
0
0 IO33
con IO33 = IO11 + IO22 . E poiché applicando questa matrice al versore e3 , ovvero (0, 0, 1), si ottiene
il versore stesso moltiplicato per IO33 , tale versore è un autovettore, e quindi l’asse z è asse principale
d’inerzia.
P ∈ S ⇒ P′ ∈ S
xP yP = −xP ′ yP ′
Per corpi rigidi omogenei, cioè con densità costante, si può adottare il criterio per cui ogni retta
passante per O che sia un asse di simmetria geometrico risulta essere anche un asse principale d’inerzia.
Infatti, se gli assi cartesiani coincidono con gli assi di simmetria gli elementi non diagonali di (3.19),
detti prodotti d’inerzia, si annullano automaticamente. Considerando per esempio una lamina simmetrica
come quella in figura, si vede subito che per ogni punto del corpo che si trovi a destra dell’asse y, ne
esiste un altro a sinistra dell’asse tale per cui il prodotto xP yP , che corrisponde all’integrando nella
12
definizione di I (O), ha lo stesso modulo ma segno opposto. Perciò tale integrale, calcolato sulla
superficie della lamina, si annulla. Inoltre, nel caso di figure piane con un asse di simmetria, essendo già
l’asse z un asse principale d’inerzia, il terzo asse principale risulta automaticamente individuato come
quello perpendicolare agli altri due.
y′ = x
6
′
y
K
x
*x′
y
Y
α α
-′
y
x
O
O
Dalla definizione di momento d’inerzia discende anche che se una figura omogenea è invariante
per rotazioni intorno ad un asse passante per O (come avviene nel caso di un disco o di una sfera per
rotazioni di ampiezza arbitraria, ma anche, per rotazioni di π/2, nel caso di una lamina quadrata), i
momenti d’inerzia rispetto a due rette che possono venir sovrapposte per mezzo della suddetta rotazione
risultano uguali. Allora, se tali rette sono ortogonali e vengono scelte come assi cartesiani, la matrice
d’inerzia ha un autovalore doppio
37
A 0 0
IO = 0 A 0 ,
0 0 C
(3.24)
e qualunque vettore del tipo u = ux i + uy j è autovettore perché soddisfa la IO (u) = Au. Dunque, se
c’è invarianza per rotazioni qualunque retta passante per O, e normale all’asse di rotazione, può esser
scelta come asse principale d’inerzia. Quando vale la (3.25) si dice che il solido è a struttura giroscopica
nel punto O.
Esempio 15.
La (3.25) può valere anche quando il solido non è invariante per rotazioni. Per esempio, una lamina
omogenea di massa M a forma di semidisco non è invariante per rotazioni, ma ha struttura giroscopica
rispetto al centro del disco. È evidente infatti che il momento d’inerzia del semidisco rispetto al diametro
che ha diviso in due il disco originario risulta essere la metà del momento d’inerzia corrispondente al
disco tutto intero. poiché quest’ultimo vale 14 (2M )R2 , con R raggio del disco, il momento d’inerzia
del semidisco è 14 M R2 . Lo stesso ragionamento può essere ripetuto per valutare il momento d’inerzia
del semidisco rispetto al suo asse di simmetria, il quale è perpendicolare all’asse considerato in precedenza. E siccome tale ragionamento conduce allo stesso risultato numerico trovato in precedenza (dal
momento che il disco intero ha struttura giroscopica rispetto ad O), allora anche il semidisco ha struttura
giroscopica rispetto ad O.
3.6 Tensore d’inerzia e baricentro.
Il baricentro gioca un ruolo significativo anche nella teoria del tensore d’inerzia, come si vede nella legge
di trasformazione che andiamo a dimostrare.
Teorema 7. Fra la matrice d’inerzia calcolata in un generico riferimento con l’origine in O e quella
calcolata in un riferimento parallelo con l’origine nel baricentro G del corpo rigido, sussiste la relazione
IO = IG + I(OG) ,
con
I(OG)
M (yG2 + zG2 )
−M xG yG
−M xG zG
= −M xG yG
M (x2G + zG2 )
−M yG zG .
−M xG zG
−M yG zG
M (x2G + yG2 )
Nello scrivere I(OG) si è scelto il riferimento con l’origine in O.
Dimostrazione. Sostituiamo nell’espressione
Z
IO (u) =
ρ(P )(P − O) × (u × (P − O))dVP ,
V
38
(3.25)
che rappresenta il tensore d’inerzia applicato a un generico vettore u, la decomposizione
P − O = (P − G) + (G − O):
Z
IO (u) =
ρ(P )(P − G) × (u × (P − G))dVP +
V
+
Z
V
+
Z
V
+
Z
V
ρ(P )(P − G) × (u × (G − O))dVP +
ρ(P )(G − O) × (u × (P − G))dVP +
ρ(P )(G − O) × (u × (G − O))dVP .
Per il secondo integrale della somma, mettendo in evidenza i termini che non dipendono dalla variabile
d’integrazione P , e per definizione di baricentro di una distribuzione continua di massa (confronta con
(3.8)), si ha che
Z
Z
ρ(P )(P − G) × (u × (G − O))dVP = ( ρ(P )(P − G)dVP ) × (u × (G − O)) =
V
V
= M (G − G) × (u × (G − O)) = 0 ,
perché si è scelta nel baricentro l’origine degli assi del riferimento rispetto al quale calcolare le coordinate
del baricentro stesso.
Lo stesso risultato si ottiene per il terzo integrale, mentre il primo rappresenta evidentemente I(G)(u)
con u arbitrario. Allora, per dedurre (3.26), occorre che l’ultimo integrale rappresenti I(OG) (u). Tenuto conto che, a parte la densità, l’integrando è costante, tale risultato può essere facilmente provato
sviluppando l’integrale come segue
Z
ρ(P )(G − O) × (u × (G − O))dVP = M (G − O) × (u × (G − O)) =
V
= M |G − O|2 u − (u · (G − O))(G − O) := I(OG) (u) ,
in cui nuovamente si è usata la (3.11). Infine, i singoli elementi di matrice si ricavano facilmente con lo
stesso procedimento usato per scrivere (3.19).
Osserviamo che i tre elementi diagonali della matrice IOG non sono altro che il prodotto della massa
per il quadrato della distanza fra gli assi coordinati del sistema originario e quelli paralleli passanti per G.
Ciò fornisce una relazione fra momenti d’inerzia rispetto ad assi paralleli che può essere generalizzata.
39
Considerando l’ultima espressione della dimostrazione precedente, è immediato verificare che
n · I(OG) (n) = M |G − O|2 − (n · (G − O))2 = M δ2 ,
dove δ è la distanza fra la retta per O avente la direzione di n e la parallela passante per G, come si può
verificare subito in figura.
Allora, basta applicare la (3.20) alla (3.26) per provare il cosiddetto Teorema di Huygens: dato il
momento d’inerzia rispetto a un asse passante per il baricentro, il momento d’inerzia rispetto a un asse
parallelo passante per il punto O è dato da
I(O, n) = I(G, n) + M δ2 ,
(3.26)
dove δ è la distanza fra le due rette.
Conseguenza del Teorema di Huygens è che dato un fascio di rette parallele quella che passa per il
baricentro del corpo è quella rispetto alla quale il momento d’inerzia è minimo. Dunque, gli autovalori
del tensore d’inerzia, essendo i momenti d’inerzia rispetto agli assi della terna principale, sono minimi
quando G è l’origine del riferimento. La terna principale d’inerzia con l’origine in G è detta terna
centrale d’inerzia.
Come corollario del Teorema 7 possiamo inoltre affermare che qualunque riferimento ottenibile a
partire dalla terna centrale d’inerzia per traslazione lungo uno dei suoi assi, è esso stesso una terna principale d’inerzia. Infatti in tal caso due delle coordinate del baricentro si annullano certamente nel nuovo
riferimento, e quindi tutti gli elementi non diagonali di IOG si annullano. Infine, nel nuovo riferimento,
due degli autovalori risulteranno corretti, secondo il teorema di Huygens, aggiungendo a ciascuno di essi
la quantità M δ2 .
Una banale conseguenza di queste ultime osservazioni riguarda il cosiddetto giroscopio. Un solido a
struttura giroscopica rispetto a un punto O si dice giroscopio se l’asse, detto asse giroscopico, corrispondente all’autovalore C (che è quello diverso dagli altri due) passa per il baricentro. Quindi il disco è un
giroscopio con asse normale al disco e passante per il centro, mentre il semidisco non è un giroscopio.
Ebbene, per quanto appena detto un giroscopio risulta essere a struttura giroscopica rispetto a ogni
punto dell’asse giroscopico.
4 Dinamica del corpo rigido, libero e vincolato.
4.1 Corpi rigidi vincolati: le equazioni del moto.
Cominciamo questo capitolo illustrando le tecniche che, quando un corpo rigido è vincolato per mezzo
di vincoli ideali e olonomi (e/o anolonomi integrabili), consentono di derivare, a partire dalle equazioni
cardinali, un numero di equazioni differenziali pure che sia pari al numero di gradi di libertà residui.
Questa trattazione è del tutto analoga a quella svolta all’inizio del secondo capitolo a proposito di
punti materiali vincolati e rappresenta un metodo alternativo, rispetto alle equazioni di Lagrange, per scrivere le equazioni del moto di un corpo rigido vincolato. Essa ha il vantaggio di adattarsi immediatamente
al calcolo delle reazioni vincolari.
Supponiamo dunque che il solido sia vincolato, e suddividiamo le forze esterne in attive e vincolari.
Si ha
d
a
v
P=R +R ,
(4.1)
dt
d
a
v
L(O) = M (O) + M (O) + P × vO .
(4.2)
dt
Per dedurre delle equazioni pure occorre il seguente risultato.
40
Teorema 8. Sia dato un arbitrario sistema di forze Fi , con i = 1, ..., N , applicate in punti solidali a
un corpo rigido in movimento. Allora, se si definiscono la potenza, il risultante e il momento delle forze
rispettivamente come
N
X
W :=
Fi · vPi ,
i=1
R :=
N
X
Fi ,
i=1
N
X
M(O) :=
(Pi − O) × Fi ,
i=1
e se il punto O, detto polo, è un arbitrario punto solidale al corpo rigido, vale la
W = R · vO + M(O) · ω ,
(4.3)
per qualunque osservatore.
Dimostrazione. La dimostrazione si basa su un semplice calcolo che utilizza la (1.17) e le proprietà
del prodotto misto:
!
N
N
N
N
X
X
X
X
Fi · vPi =
Fi · (vO + ω × (Pi − O)) =
Fi · vO +
Fi · ω × (Pi − O) =
i=1
= R · vO +
i=1
N
X
i=1
i=1
ω · (Pi − O) × Fi = R · vO + ω ·
i=1
N
X
(Pi − O) × Fi
i=1
!
= R · vO + ω · M(O) .
La (4.3) vale anche per la potenza virtuale W (vedi Definizione 6) di un sistema di forze applicate
a un corpo rigido. Infatti, le velocità virtuali soddisfano un’identità analoga alla (1.17), ed è proprio
questa proprietà del campo di velocità che ha reso possibile la dimostrazione precedente. Dunque, dati
due arbitrari punti solidali a un corpo rigido vincolato esiste un unico vettore ω ′ , detto velocità angolare
virtuale, per cui vale la
uP = uO + ω ′ × (P − O) ,
e che per vincoli fissi coincide con ω. Questa identità è dimostrabile con un procedimento simile a quello
usato nel Teorema 2.
Della velocità angolare virtuale si può anche dare una definizione molto classica.
Definizione 10. Si dice velocità angolare virtuale ogni velocità angolare compatibile con la forma
che avrebbero i vincoli se venissero fissati all’istante dato.
Quando i vincoli sono ideali l’annullarsi della potenza virtuale delle reazioni vincolari implica la
v
v
R · uO + M (O) · ω′ = 0 ,
(4.4)
e questa può essere utilizzata per scrivere equazioni pure, come andiamo ora a verificare per alcuni casi
significativi.
a) Se il vincolo impone al corpo rigido di traslare soltanto, da un lato è sufficiente conoscere il moto
di un qualunque punto solidale O (perchè tutti i punti hanno traiettorie congruenti), dall’altro,
poiché ω′ = ω = 0, succede che la (4.4) assume una forma perfettamente analoga alla (2.10).
Allora, se scegliamo di studiare il moto di G, possiamo dedurre un’equazione pura dalle (4.1)
con lo stesso procedimento utilizzato per la (2.5). Infatti la (3.9) permette di usare le (4.1) come
equazioni del moto del baricentro, considerato come un punto materiale sotto l’effetto di una forza
pari al risultante.
41
b) Se invece esiste un punto solidale O che è stato fissato si avrà uO = 0, e quindi
v
M (O) · ω = 0
per ogni ω possibile. In particolare, la relazione dovrà valere anche nel caso in cui si abbia ω = ei ,
scegliendo a turno i = 1, 2, 3. Ciò, a causa della definizione (1.6) delle componenti di un vettore,
v
v
v
v
implica M(O)x = M(O)y = M(O)z = 0, e quindi M (O) = 0. Allora, data la (4.2), le equazioni
pure che cercavamo sono
d
a
L(O) = M (O) .
dt
c) L’ultimo esempio è quello in cui ad essere fisso è un asse solidale. Per fermare le idee poniamo
v
che l’asse passi per O e abbia la direzione e3 . In questa situazione la M (O) · ω = 0 resta vera,
essendo fissi tutti i punti dell’asse, ma non consente piú di dedurre l’annullarsi del momento delle
reazioni vincolari. Infatti, poiché ω non è piú arbitraria ma parallela a e3 , si può soltanto affermare
che il momento è normale all’asse fisso. Ciononostante, si ottiene un’equazione pura eseguendo il
prodotto scalare di (4.2) con e3 :
d
a
(4.5)
(L(O) · e3 ) = M (O) · e3 .
dt
D’altra parte, un’unica equazione differenziale pura è sufficiente, perché il solido cosı́ vincolato
ha un solo grado di libertà.
4.2 Calcolo delle reazioni vincolari.
Mostriamo ora, tramite un esempio, in che modo le equazioni cardinali possono servire a calcolare le
reazioni vincolari applicate a corpi rigidi soggetti a vincoli ideali. Svilupperemo il caso di un corpo
rigido con asse fisso, in assenza di attrito.
L’equazione differenziale del moto si ricava da (4.5), una volta scelta come coordinata lagrangiana
l’angolo θ che una qualunque retta solidale normale all’asse di rotazione forma con una qualunque retta
fissa, pure normale all’asse di rotazione. Il procedimento consiste nell’applicare il Teorema 6, cosa
possibile se il polo O viene scelto sull’asse fisso. Allora, poiché ω = θ̇e3 e poiché si puó applicare la
(3.19) con n = e3 , si ha che
L(O) · e3 = e3 · IO (θ̇e3 ) = I(O, e3 )θ̇ .
Qui I(O, e3 ) rappresenta il momento d’inerzia rispetto all’asse fisso, che non va confuso, lo sottolineiamo, con il terzo asse della terna principale d’inerzia per O, la cui direzione è data da k. Per calcolare
I(O, e3 ) si può far ricorso alla (3.22).
Avendo cosı́ esplicitato il primo membro, l’equazione (4.5) diventa
a
I(O, e3 )θ̈ = M (O) · e3 .
(4.6)
Passiamo ora al calcolo delle reazioni vincolari esercitate dall’asse fisso.
Nota che sia l’accelerazione angolare, è possibile scrivere la (4.2). Lo faremo servendoci della (3.21),
e sviluppando la derivata temporale del momento angolare nel modo seguente
d
d
L(O) = (Aωx i + Bωy j + Cωz k)
dt
dt
di
dj
dk
Aω̇x i + B ω̇y j + C ω̇z k + Aωx + Bωy + Cωz
dt
dt
dt
IO (ω̇) + Aωx ω × i + Bωy ω × j + Cωz ω × k
IO (ω̇) + ω × (Aωx i + Bωy j + Cωz k)
42
=
=
=
= IO (ω̇) + ω × L(O) .
(4.7)
Nell’ultimo passaggio di (4.7) non si è fatto altro che porre in evidenza ω, mentre il simbolo IO (ω̇)
sta a indicare la derivata del momento angolare come verrebbe calcolata dall’osservatore solidale, per il
quale variano solo le componenti e non i versori.
Ora nella (4.2) possiamo sostituire l’accelerazione angolare corrispondente al nostro caso, cioè la
derivata temporale di ω = θ̇e3 . L’equazione risultante è
a
v
IO (θ̈e3 ) + θ̇ 2 e3 × [A(e3 · i)i + B(e3 · j)j + C(e3 · k)k] − M (O) = M (O) .
Qui si può sostituire l’espressione di θ̈ ricavabile dalla (4.6), e in tal modo il secondo membro diventa
una funzione nota di θ e θ̇. Esso rappresenta il momento delle reazioni vincolari rispetto a un arbitrario
punto dell’asse.
Se fossimo interessati anche al calcolo del risultante potremmo effettuarlo usando la prima equazione
cardinale nella forma (4.1), perchè prendendo θ̈ come in (4.6) si può esprimere anche G̈ in funzione di θ
e θ̇ soltanto.
e
63
j
I
b
α
G
i
a
Esempio 16. La lamina omogenea in figura è vincolata senza attrito a un asse fisso diretto come la
diagonale, ed è soggetta solo alla forza√peso. Scrivere l’equazione del moto e calcolare il momento delle
reazioni vincolari nel caso in cui b = 3a, e nel caso b = a.
Essendo il baricentro sull’asse di rotazione, il secondo membro di (4.6) si annulla perché il momento
della forza peso è nullo rispetto a G. Dunque l’equazione del moto è
I(G, e3 )θ̈ = 0 .
Allora, la velocità angolare è costante indipendentemente dal rapporto fra i lati e dall’orientazione,
verticale o meno, dell’asse di rotazione.
Per il momento delle reazioni vincolari, posto α = arctan(b/a), calcoliamo
v
M (G) = IG (θ̈e3 ) + θ̇ 2 e3 × [A(e3 · i)i + B(e3 · j)j] =
1
1
1
2
2
2
= θ̇ (cos αi + sin αj) ×
M b cos αi + M a sin αj = θ̇ 2 sin α cos α M (a2 − b2 )k .
12
12
12
√
Perciò il risultato, normale all’asse di rotazione, nel primo caso è in modulo pari a θ̇ 2 M a2 3/24, e nel
secondo caso vale zero.
Avvertenza: al termine dell’ultimo paragrafo l’annullarsi delle reazioni vincolari quando b = a
sembrerà banale. Infatti, per un quadrato (che è un giroscopio) la diagonale è asse principale d’inerzia.
Vedremo nell’ultimo paragrafo che la rotazione uniforme intorno a un asse principale è un moto che si
verifica spontaneamente, senza bisogno di vincoli che lo sostengano, quando, come in questo caso, il
sistema delle forze attive è equivalente a zero.
4.3 Scrittura delle equazioni di Lagrange in presenza di corpi rigidi.
L’interesse dimostrato nel secondo capitolo per le equazioni di Lagrange è dovuto al fatto che esse sono
utilizzabili come equazioni del moto per qualunque sistema meccanico, quali che siano i vincoli, purché
43
ideali e olonomi. Occorre però riuscire a scrivere l’energia cinetica dei corpi rigidi, e le componenti
lagrangiane delle forze attive, in funzione delle coordinate lagrangiane e delle loro derivate prime rispetto
al tempo.
Supponiamo dapprima che il corpo rigido abbia un punto fisso, o un punto istantaneamente fermo,
che indicheremo con O, cosı́ che, al solito, valga la vP = ω × (P − O). Allora
Z
Z
1 2
1
ρvP dVP =
ρvP · ω × (P − O) dVP =
T =
V 2
V 2
Z
Z
1
1
=
ρω · (P − O) × vP dVP = ω ·
ρ(P − O) × vP dVP ,
2
V 2
V
perché il prodotto misto non cambia per permutazioni cicliche. Ma questo risultato non è altro che
1
1
1
T = ω · L(O) = ω · IO (ω) = (Aωx2 + Bωy2 + Cωz2 ) ,
2
2
2
(4.8)
in cui l’ultimo passaggio utilizza le componenti della velocità angolare nella terna principale d’inerzia
(vedi (3.21)), riferimento in cui la formula appena ottenuta risulta semplice da ottenere e da applicare.
Supponiamo ora che il corpo rigido non abbia punti fissi, oppure che ne abbia uno ma che non sia
immediato individuare la terna principale per quel punto. In tal caso, conviene utilizzare il riferimento
baricentrale.
Consideriamo la legge di trasformazione delle velocità fra il riferimento fisso, con origine in O′ e
assi x′ , y ′ e z ′ , e la terna baricentrale (con origine in G e assi sempre paralleli a quelli fissi). Inseriamo
tale legge nella definizione di energia cinetica, dove indicheremo con l’accento la velocità calcolata
dall’osservatore fisso per distinguerla da quella calcolata dall’osservatore baricentrale:
Z
Z
1 ′2
1
′
′
′
T =
) · (vP + vG
) dVP =
ρvP dVP =
ρ(vP + vG
2
2
V
V
Z
Z
Z
1 2
1
1 ′2
′
=
ρvP dVP + 2
ρvP · vG dVP +
ρvG dVP =
V 2
V 2
V 2
Z
1
′
′
= T + vG ·
ρvP dVP + M vG2 .
2
V
Da qui, poiché differenziando rispetto al tempo la definizione di baricentro si ottiene
Z
ρvP dVP = M vG ,
V
e poiché M vG = 0 per l’osservatore baricentrale; tenendo conto inoltre che tale osservatore può
applicare la (4.8) con G = O, si ricava infine
1
1
1
′
′
T ′ = M vG2 + T = M vG2 + (Aωx2 + Bωy2 + Cωz2 ) .
2
2
2
(4.9)
In (4.9), A, B e C sono calcolati nella terna centrale d’inerzia, e di solito sono tabulati o facilmente
deducibili da risultati tabulati, mentre il vettore ω è evidentemente lo stesso per i due osservatori in moto
relativo traslatorio. L’equazione (4.9) rappresenta la formula generale per il calcolo dell’energia cinetica
di un corpo rigido.
Il primo passaggio in (4.9) è detto Teorema di König, e vale per qualunque sistema, anche non rigido.
Le (4.8) e (4.9) permettono di scrivere le equazioni del moto di Lagrange del corpo rigido nel caso più
generale, a patto di poter esprimere in funzione delle coordinate lagrangiane non solo le componenti della
velocità angolare, ma anche le componenti lagrangiane del sistema delle forze attive. Tale sistema può
44
essere anche una distribuzione continua (come avviene per la forza peso o, se si lavora in un riferimento
ruotante, per la forza centrifuga).
Una buona indicazione generale per la scrittura delle componenti lagrangiane delle forze applicate al
corpo rigido si ottiene applicando la (4.3) del Teorema 8 al caso di potenza virtuale di forze attive
a
a
a
W = R · uO + M (O) · ω ′ ,
e confrontando questa formula con la
a
W =
N
X
Qj uj ,
j=1
che si deduce facilmente dalla definizione (2.14) del Teorema 3.
Dal confronto fra le due formule e dalla definizione di velocità virtuale implicitamente discende la
definizione operativa
∂O
∂ω ′
a
a
+ M (O) ·
,
Qj = R ·
∂qj
∂ q̇j
ove si è fatta l’identificazione uj = q̇j e si è data per scontata la dipendenza lineare della velocità angolare
dalle derivate degli angoli.
4.4 Equazioni del moto del corpo rigido libero e del corpo rigido con punto fisso.
I due distinti approcci al problema delle equazioni del moto e del calcolo delle reazioni vincolari risultano
del tutto equivalenti per quanto riguarda il moto del corpo rigido libero.
Affrontiamo questo argomento riscrivendo le equazioni (3.9) e (3.10)
M
dvG
(e)
=R ,
dt
d
(e)
L(G) = M (G) .
dt
La prima equazione altro non è che l’equazione del moto di un punto. La seconda, come è stato provato
nel Teorema 5, può essere studiata in un riferimento parallelo a quello fisso e avente l’origine in G.
In tale riferimento la struttura della seconda equazione risulta relativamente semplice, e, per di piú, è
del tutto identica a quella che descrive il moto di un corpo rigido con un punto fisso O, quando i vincoli
sono lisci.
Infatti in quest’ultimo caso si può riscrivere la (4.2) tenendo conto che il polo O ha velocità nulla
d
a
v
L(O) = M (O) + M (O) .
dt
v
Poiché al punto b) del Paragrafo 4.1 è stato provato che M (O) = 0, si ottiene di conseguenza la
d
a
L(O) = M (O) .
dt
Sebbene nella seconda equazione cardinale il momento angolare e le sue derivate siano misurati da
un osservatore che, necessariamente, non è solidale al corpo rigido, le quantità vettoriali in essa presenti
possono comunque venir proiettate in un sistema di riferimento solidale, e, in particolare, in una terna
principale d’inerzia per O.
Possiamo allora riscrivere il primo membro dell’equazione usando la (3.21) e poi le formule di
Poisson, come in (4.7). Si ottiene cosı́
d
L(O) = IO (ω̇) + ω × L(O) .
dt
45
L’equazione può poi esser proiettata sugli assi di qualunque riferimento. In particolare, la derivata
calcolata dall’osservatore fisso può essere proiettata sugli assi della terna principale d’inerzia, che è un
riferimento mobile, semplicemente utilizzando in tale riferimento il determinante simbolico per il calcolo
del prodotto vettoriale.
Si termina il calcolo ponendo in evidenza i prodotti di componenti di ω che appaiono nelle tre
componenti della derivata del momento angolare. Infine si scrive l’uguaglianza con le tre componenti
del momento delle forze. Si hanno allora le equazioni di Eulero:
a
Aω̇x + ωy ωz (C − B) = M(O)x
(4.10)
a
B ω̇y + ωx ωz (A − C) = M(O)y
a
C ω̇z + ωx ωy (B − A) = M(O)z .
Anche per un corpo libero la seconda equazione cardinale assume la forma (4.10), in quanto sappiamo dal Teorema 5 che essa può venir scritta in un riferimento baricentrale senza che le grandezze fisiche
in questione cambino. Poiché in tale riferimento G è, evidentemente, un punto fisso, si possono usare i
risultati del Teorema 5, e in particolare la (3.21).
Interessante, e relativamente semplice, è il caso in cui il secondo membro di (4.10) è nullo. Si hanno
allora i cosiddetti moti per inerzia, e le equazioni possono esser trattate come equazioni differenziali del
prim’ordine nell’incognita ω. Un tipico esempio è il moto di un oggetto lanciato, ovvero il moto di un
corpo rigido libero soggetto solo alla forza peso, il cui momento rispetto al baricentro, come si sa, è
nullo.
La prima osservazione da fare è che, mentre la velocità di un punto materiale in assenza di forze è
costante, la velocità angolare del corpo rigido non è necessariamente costante quando il momento delle
forze è nullo.
Per dimostrare ciò occorre prima dire che la velocità angolare del corpo, al contrario di quanto
avviene per il momento angolare, ha nel riferimento fisso la stessa derivata temporale che in quello
solidale. Infatti, ripetendo per la derivata di ω gli stessi calcoli svolti in (4.7) per la derivata del momento
angolare si vede che le due derivate differirebbero solo per il termine ω × ω, che è nullo. Dunque, per
avere una velocità angolare costante nel riferimento fisso è necessario e sufficiente che si conservino le
sue componenti nel riferimento mobile.
Si possono allora sostituire le relazioni ω̇x = ω̇y = ω̇z = 0 nel sistema di equazioni differenziali
(4.10), e vedere se effettivamente esso ammette una soluzione (ωx , ωy , ωz ) che non dipende dal tempo.
Ciò avverrà se il sistema omogeneo di equazioni algebriche
ωy ωz (C − B) = 0
(4.11)
ωx ωz (A − C) = 0
ωx ωy (B − A) = 0 ,
nelle incognite ωx , ωy e ωz , ammette soluzioni diverse da quella nulla.
Ne consegue che assegnata al corpo una velocità angolare iniziale questa, in generale, non si mantiene
costante nel tempo in assenza di forze. Perché solo le soluzioni del sistema (4.11) si comportano cosı́. Si
può poi verificare per sostituzione che tali soluzioni sono, se A 6= B 6= C, del tipo (ωx , 0, 0), oppure (0,
ωy , 0), oppure (0, 0, ωz ); e se A = B 6= C (struttura giroscopica), del tipo (ωx , ωy , 0), oppure (0, 0, ωz ).
Soltanto nel caso A = B = C (sfere omogenee, cubi) capita che qualunque vettore dello spazio risolve
(4.10).
Per quanto osservato dopo la (3.24) circa i solidi a struttura giroscopica, le precedenti considerazioni
possono essere riassunte nella seguente proposizione.
Teorema 9. In un moto per inerzia la velocità angolare si mantiene costante se e soltanto se è diretta
come un asse principale d’inerzia, ed è quindi parallela al momento angolare.
46
Si può considerare come controesempio il caso generale del moto per inerzia di un solido a struttura
giroscopica intorno al suo baricentro, o intorno ad un punto fisso O.
Per meglio seguire il ragionamento si prenda a modello il moto della terra, che è un giroscopio in
quanto schiacciata ai poli: per i poli e per il baricentro passa l’asse giroscopico, che è anche l’asse
della rotazione giorno-notte. Esso forma un angolo costante con il piano che contiene l’orbita della terra
intorno al sole, detto piano dell’eclittica, e ciò produce l’alternarsi delle stagioni nel corso dell’anno.
Tuttavia la direzione dell’asse giroscopico non è costante rispetto alle cosiddette stelle fisse. Per essere
piú precisi esso ruota con velocità angolare costante intorno all’asse normale al piano dell’eclittica e
passante per il baricentro della terra, e compie un giro completo ogni 26000 anni (dunque, ogni 13000
anni sulla terra si invertono le stagioni!).
La ’spiegazione’ di tale moto, come pure dell’analogo moto di un pallone da rugby intorno al suo
baricentro (purché si trascuri l’effetto dell’aria), è la seguente: nel moto per inerzia di un giroscopio le
equazioni (4.10) diventano
Aω̇x + ωy ωz (C − A) = 0
Aω̇y + ωx ωz (A − C) = 0
C ω̇z = 0 .
Di conseguenza ωz è costante. Allora, poiché
ω = ωx i + ωy j + ωz k
e poiché per un giroscopio la (3.21) assume la forma
L(G) = A(ωx i + ωy j) + Cωz k = A(ω − ωz k) + Cωz k ,
uguagliando il primo e l’ultimo termine di questa relazione si ricava, dopo due passaggi algebrici,
un’espressione di ω in funzione di L(G):
1
C
ω = L(G) + 1 −
ωz k .
A
A
Ma in un moto per inerzia anche L(G) è costante (dal momento che il secondo membro di (3.10) si
annulla), e dunque la formula appena scritta ci dice che ω è sempre somma di un vettore costante nel
riferimento fisso (il momento angolare) e di un vettore, parallelo all’asse giroscopico, costante nel riferimento solidale. L’angolo fra i due vettori è pure costante, come si può immediatamente verificare
eseguendo il loro il prodotto scalare. Quindi il modulo di ω è costante (per vederlo basta calcolare ω · ω)
ma la direzione non lo è.
In effetti, applicando ω in un punto dell’asse fisso se ne vedrebbe l’estremità muoversi di moto
circolare uniforme intorno ad esso. Questo tipo di moto è detto precessione.
47