z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
3
Statica del Corpo Rigido
In questo capitolo, diamo una definizione formale di corpo rigido, ne descriviamo la cinematica e ne formuliamo il problema di equilibrio in presenza di
vincoli di posizione capaci di sviluppare un sistema reattivo di forze e coppie
a seguito dell’applicazione al corpo di un assegnato sistema attivo di forze e
coppie. Come vedremo, questo problema di equilibrio consiste prima nel trovare tutte quelle configurazioni del corpo nelle quali i vincoli esplichino un
sistema reattivo che, assieme al sistema attivo, costituisca un sistema nullo,
poi nel qualificare la stabilità di tali configurazioni, cioè, la loro persistenza a
fronte di modeste perturbazioni.
9 Tre esempi introduttivi
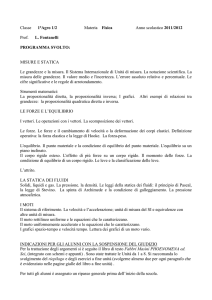
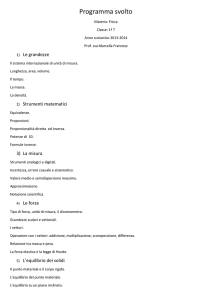
Esempio 1. Cominciamo con un esempio semplice, e tuttavia significativo,
di problema di equilibrio per un corpo rigido (Fig. 3.1.a), l’asta AB (pensata,
Figura 3.1.
per semplicità, priva di peso), vincolata nell’estremo A da una cerniera e sog-
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
56
3 Statica del Corpo Rigido
getta in B ad una forza di direzione e verso costanti. L’intuizione ci suggerisce
che due configurazioni di equilibrio sono possibili, quelle rappresentate in Fig.
3.1.b; nel caso (1), l’equilibrio ci appare stabile (nel senso che piccole pertubazioni della configurazione in figura non sembrano foriere di grandi effetti),
instabile nel caso (2), quando perturbazioni comunque piccole ci sembrano
capaci di indurre l’abbandono della configurazione di equilibrio relativa.
Sulla base di questo esempio, del problema generale della statica del corpo
rigido si può dare la seguente formulazione verbale: date le forze agenti sul
corpo e le condizioni di vincolo, trovare le configurazioni di equilibrio e le relative reazioni vincolari; quindi, qualificare la natura dell’equilibrio in ciascuna
delle suddette configurazioni. Per formalizzare la prima parte di questo tipo
di problemi, in vista della loro risoluzione, introduciamo provvisoriamente il
seguente:
Principio di Equilibrio. In una configurazione di equilibrio, il sistema
di tutte le forza e coppie applicate al corpo, siano esse attive o reattive, deve
essere un sistema nullo.
Applicato al caso dell’asta di Fig. 3.1.a, il Principio di Equilibrio si traduce
nella seguente coppia di equazioni:
f + rA = 0
&
−
−
⇀
AB × f = 0,
(9.1)
che esprimono, rispettivamente, l’annullarsi del risultante e del momento risultante rispetto al polo A del sistema di forze {(B, f ), (A, rA )} (qui rA denota
l’incognita reazione vincolare applicata all’asta in corrispondenza della cerniera di vincolo). Dalla seconda equazione si deduce che, in una configurazione
−
−
⇀
di equilibrio, AB deve essere parallelo a f : è proprio questa condizione che
seleziona, tra le tutte le possibili configurazioni compatibili con il vincolo in
A, le due configurazioni in Fig. 3.1.b. Invece, la prima equazione, che si può
naturalmente riscrivere nella forma equivalente
rA = −f ,
seleziona, tra tutte le possibile reazioni vincolari che la cerniera è in grado di
produrre, quella che rende nullo il sistema di forze sia nell’una che nell’altra
delle due configurazioni di equilibrio.
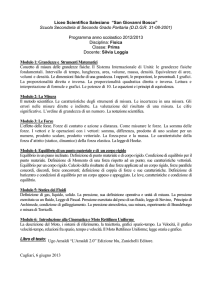
Esempio 2. Applichiamo adesso il Principio di Equilibrio al caso di Fig. 3.2,
nel quale l’asta è incernierata nel suo punto di mezzo e soggetta a due forze
estreme identiche, di direzione e verso costanti. Questa volta, il sistema di forze
in gioco è: {(A, f ), (B, f ), (O, rO )}, dove rO denota la reazione vincolare nella
cerniera di vincolo. Il Principio di Equilibrio fornisce:
2f + rO = 0,
−⇀
−−⇀
OA × f + OB × f = 0;
la prima equazione determina la reazione vincolare, la seconda (che è identica−⇀ −−⇀
mente soddisfatta, perchè OA + OB = 0) determina l’insieme delle configurazioni d’equilibrio: tutte quelle di angolo φ ∈ [0, 2π). Per la nostra intuizione, la
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
9 Tre esempi introduttivi
57
Figura 3.2.
probabilità di trovare l’asta nell’una o nell’altra di queste infinite configurazioni è la stessa: la natura dell’equilibrio non ci pare né stabile né instabile – come
accadeva per le due configurazioni dell’esempio precedente, che ci sembrava
avessero, rispettivamente, probabilità 1 e 0 d’essere osservate – ma piuttosto
indifferente, nel senso che qualunque perturbazione ammissibile di posizione,
anche se non piccola, ci pare evidente che porti l’asta in una diversa ma non
meno probabile configurazione di equilibrio.
La conclusione da trarre da questi due esempi è che il Principio di Equilibrio nulla dice sulla stabilità delle configurazioni che determina. Si potrebbe
pensare che cosı̀ non sia quando di configurazioni di equilibrio possibile ce ne
sia una soltanto. Che questa congettura sia falsa è provato dal prossimo esempio, che propone un problema di statica del corpo rigido un pò più complesso
del precedente.
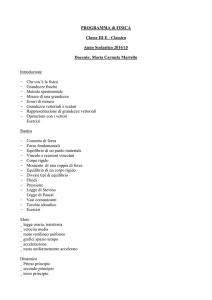
Esempio 3. Consideriamo una barra rigida pesante, di lunghezza l, a contatto
con le pareti di una cavità di angolo d’apertura α, come in Fig. 3.3. Se supponiamo il contatto privo di attrito, le reazioni vincolari rA , rB saranno perpendicolari alle pareti; non sappiamo tuttavia a priori se ci siano coppie (A, B)
di punti di contatto per le quali l’equilibrio sia possibile. Per saperlo, applichiamo il Principio di Equilibrio al sistema di forze {(G, g ), (A, rA ), (B, rB )}.
Figura 3.3.
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
58
3 Statica del Corpo Rigido
Troviamo che dev’essere:
r = g + rA + rB = 0,
−−⇀
m(Q) = QG × g = 0,
dove Q è il punto di intersezione delle rette d’azione delle reazioni vincolari.
Per analizzare le conseguenze di queste due equazioni, scegliamo il riferimento
cartesiano in figura, con O ≡ A. Allora, detto φ il parametro che individua le
configurazioni della barra candidate ad essere di equilibrio, abbiamo che:
B ≡ (l sin φ, l cos φ);
Q ≡ (0, q) , con q = l cos φ − d, d = l sin φ tan α ;
1
1
G ≡ ( l sin φ, l cos φ) ;
2
2
g = ge1 .
L’equazione m(Q) = 0 assume la forma:
e1
e2
e3
l sin φ l cos φ − q 0 = g( l cos φ − q)e3 = 0,
2
2
2
g
0
0
cioè:
l
− cos φ + l sin φ tan α = 0 ⇒ cot φ = 2 tan α.
2
Per α ∈ (0, π/2), la funzione cotangente è invertibile; c’è dunque un’unica
configurazione di equilibrio, determinata dall’angolo d’apertura della cavità:
φ = cot−1 (2 tan α).
(9.2)
Ebbene, quest’unica configurazione d’equilibrio è instabile: ogni men che
piccola perturbazione comporta la caduta della barra nella cavità.
Esercizi
9.1. Per la barra di Fig. 3.3, si calcolino le reazioni di equilibrio e le distanze
del punto C da A e da B, determinando il comportamento di queste quantità
anche per α → 0, π/2.
Soluzione. Quanto alle reazioni
rA = rA e2 ,
rB = rB (cos αe1 + sin αe2 ),
la condizione di nullo del risultante implica che
0 = (g + rB cos α)e1 + (rA + rB sin α)e2
⇔
rA = g tan α e2
.
rB = −g(e1 + tan α e2 )
Quanto alle distanze cercate, la condizione che le determina è:
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
10 Cinematica
59
−⇀ −−⇀ −
−
⇀
AC + CB + BA = 0.
Poichè
−⇀
AC = l1 e1 ,
−−⇀
CB = l2 (− sin αe1 + cos αe2 ),
−
−
⇀
BA = −l(sin φe1 + cos φe2 ),
si trova:
l1 − sin α l2 = sin φ l
cos α l2 = cos φ l
⇒
l1 = (sin φ + cos φ tan α)l, l2 =
cos φ
l.
cos α
Allora, dal momento che (9.2) implica che φ → π/2 (φ → 0) se α → 0
(α → π/2), si vede che le posizioni limite di equilibrio della barra sono: quella
verticale con B ≡ C, per α → 0; quella orizzontale, un po’ più difficile da
visualizzare, quando l1 , l2 → ∞ perchè α → π/2.
10 Cinematica
Sia C una regione limitata di E, occupata da un corpo materiale del quale
immaginiamo di etichettare i punti P, Q, . . . , una volta per tutte. Diciamo
che il corpo C è rigido, riferendoci ad esso per memoria come a Crig , se la
distanza tra due suoi punti qualunque non cambia nel corso di un qualunque
suo moto:
−−⇀
|P Q(t)| = cost. .
(10.1)
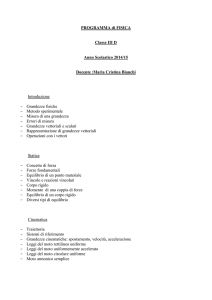
Fissato un sistema di riferimento spazio-temporale, visualizzato nella Fig. 3.4
Figura 3.4.
per mezzo di tre regoli rigidi ortogonali e un orologio, l’applicazione a valori
vettoriali
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
60
3 Statica del Corpo Rigido
−−
⇀
t 7→ pO (t) := OP (t)
fornisce la posizione assoluta di P all’istante t rispetto all’origine O di quel
riferimento. La posizione relativa a P di Q è:
−−
⇀
−−⇀
−−
⇀
pP (Q, t) := P Q(t) = Q(t) − P (t) = OQ(t) − OP (t) = pO (Q, t) − pO (P, t)
e può, quindi, essere intesa come la differenza tra le posizioni assolute di Q e
P all’istante corrente. Differenziando la posizione assoluta di P :
t 7→
d
pO (t) =: vO (P, t) ,
dt
se ne ottiene la velocità assoluta all’istante t, mentre la velocità relativa a P
di Q è la differenza delle rispettive velocità assolute:
d
(pO (Q, t) − pO (P, t)) = vO (Q, t) − vO (P, t) =: vP (Q, t) .
dt
D’ora in avanti, avendo fissato un riferimento spazio-temporale “assoluto”,
scriveremo per semplicità p(P, t) e v (P, t), invece di pO (P, t) e vO (P, t), per
posizione e velocità assolute di P al tempo t.
Una prima importante conseguenza dell’ipotesi di rigidità si ricava differenziando rispetto al tempo una versione equivalente dell’equazione (10.1) che
la esprime:
−−⇀
|P Q(t)|2 = cost..
Si ottiene:
−−⇀ d −−
⇀
0 = P Q · P Q = pP (Q, t) · vP (Q, t) ;
(10.2)
dt
dunque, dati due punti P, Q di un corpo rigido in moto, ad ogni istante il luogo
Figura 3.5.
delle possibili velocità vP (Q, t) di Q relative a P è il piano perpendicolare al
vettore pP (Q, t), che specifica la posizione di Q relativa a P (Fig. 3.5). Precisamente, si può far vedere che vale la seguente formula di rappresentazione
del campo di velocità relative:
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
10 Cinematica
vP (Q, t) = ω(t) × pP (Q, t) , Q ∈ Crig ;
61
(10.3)
il vettore ω è detto velocità angolare.
Mostriamo che ω non dipende dalla scelta di P supponendo, per assurdo,
che ne dipenda. Cominciamo scegliendo di rappresentare la velocità assoluta
di Q in termini della velocità assoluta di P e della velocità di Q relativa a P :
−−
⇀
v (Q) = v (P ) + vP (Q) = v (P ) + ω(P ) × P Q; 1
similmente, se per dare una rappresentazione della velocità assoluta di Q
scegliamo un qualunque altro punto P ′ invece di P , otteniamo:
−−⇀
v (Q) = v (P ′ ) + ω(P ′ ) × P ′ Q ;
d’altra parte, dev’essere anche vero che
−−⇀
v (P ′ ) = v (P ) + ω(P ) × P P ′ .
Combinando le ultime tre relazioni, troviamo:
−−⇀
−−⇀
−−⇀
v (P ) + ω(P ) × P Q = v (P ) + ω(P ) × P P ′ + ω(P ′ ) × P ′ Q ,
e ne deduciamo che
−−⇀
−−⇀
−−⇀ −−⇀
ω(P ) × (P Q − P P ′ ) = ω(P ′ ) × P ′ Q ⇒ (ω(P ) − ω(P ′ ) × P ′ Q = 0 ,
ovvero, visto che l’ultima relazione vettoriale vale qualunque sia Q e che,
−−⇀
quindi, si può scegliere il vettore P ′ Q in modo arbitrario,
ω(P ) = ω(P ′ ) .
Ma, poiché anche la scelta di P ′ è arbitraria, si conclude che, nella rappresentazione (10.3) del campo delle velocità relative ad un punto P dei punti di un
corpo rigido, la velocità angolare ω è effettivamente indipendente da P .
Osservazioni. 1. È facile vedere che, se vale la (10.3), allora il corpo è rigido.
Basta infatti prendere il prodotto scalare di quella relazione per pP (Q, t) per
ottenere:
0 = pP (Q, t) · vP (Q, t) ⇒ |pP (Q, t)|2 = cost. .
2. Un campo vettoriale che abbia la forma
−−⇀
w (Q) = wo + ω o × Po Q, Q ∈ C,
(10.4)
si dice un atto di moto rigido definito sulla regione C; è facile vedere che
wo = w (Po ), onde l’ultima relazione ammette la scrittura equivalente
1
Qui e nel seguito di questa dimostrazione, per semplicità di scrittura, lasciamo
sottintesa la dipendenza da t; per la stessa ragione, scriviamo v (P ), invece di
vO (P ), per la velocità assoluta di P .
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
62
3 Statica del Corpo Rigido
−−⇀
w (Q) = w (Po ) + ωo × Po Q, Q ∈ C.
(10.5)
Va da sé che, se C è occupata all’istante t da un corpo rigido Crig in moto, il
campo delle velocità assolute dei punti di Crig :
v (Q, t) = v (Po , t) + ω(t) × pPo (Q, t), Q ∈ Crig ,
(10.6)
può essere inteso come uno speciale atto di moto rigido, quello che a quell’istante effettivamente si realizza nel corso di quel moto.
3. Si immagini un corpo rigido piano come in Fig. 3.6, in un moto in cui un suo
punto P resti fisso e il vettore velocità angolare sia perpendicolare al piano del
−−
⇀
foglio: ω = ωe3 , ω > 0. Allora, |v (Q)| = ω|P Q| misura l’angolo “spazzato” dal
Figura 3.6.
−−⇀
vettore posizione P Q nell’unità di tempo; di qui il nome “velocità angolare”
per il vettore ω che appare nella rappresentazione (10.3).
11 Potenza di un sistema di forze e coppie
La potenza spesa da una forza f applicata ad un punto che abbia velocità
assoluta v è:
Π(f )[v ] := f · v .
Questa nozione è indipendente dalla natura del corpo materiale cui il punto
di applicazione della forza appartiene.
Se di un corpo si considera un generico atto di moto rigido vrig di tipo (10.4), la potenza spesa dalla forza f (P ) applicata a P prende l’aspetto
seguente:
−−⇀
Π(f )[vrig ] = f (P ) · wo + Po P × f (P ) · ω o .
(11.1)
Osservando la (11.1), si nota che le variabili cinematiche (wo , ω o ), che parametrizzano la collezione degli atti di moto rigidi, sono coniugate, rispettiva−−⇀
mente, alle variabili dinamiche f (P ), Po P × f (P ) , la forza applicata e il suo
momento rispetto al punto Po .
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
11 Potenza di un sistema di forze e coppie
63
Osservazione. Fissati wo e ωo , la potenza non cambia se la forza viena
spostata lungo la propria retta di azione. Infatti, scelto un altro punto di
applicazione P ′ = P + α vers f (Fig. 3.7), si ha
−−−⇀
−−⇀
f ·w (P ′ ) = f ·wo + Po P ′ ×f ·ω o = f ·wo +(Po P +α vers f )×f ·ω o = f ·w (P ).
Figura 3.7.
La potenza spesa da una coppia di forze (A, f ), (B, −f ) in un atto di moto
rigido è:
−−⇀ −−⇀
f (A) · w (A) + f (B) · w (B) = f · (w (A) − w (B)) = f · ω o × (Po A − Po B)
−−
⇀
= BA × f · ω o
Figura 3.8.
(Fig. 3.8). Per traslato, la potenza spesa in un atto di moto rigido da una
coppia (Q, c) è:
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
64
3 Statica del Corpo Rigido
Π(c)[vrig ] := c · ωo .
In conclusione, la potenza spesa in un atto di moto rigido da un sistema
di forze e coppie S = {(Pi , fi ), i = 1, 2, . . . , N ; (Qj , cj ), j = 1, 2, . . . , M } è:
Π(S)[vrig ] =
N
X
i=1
=
M
−−⇀ X
ci · ω o
fi · wo + ωo × Po Pi +
N
X
i=1
j=1
fi · wo +
N
X
i=1
M
X −−⇀
cj · ω o
Po Pi × fi +
j=1
= r · wo + m(Po ) · ω o ,
(11.2)
dove (r , m(Po )) sono il risultante e il momento risultante del sistema considerato.
Osservazione. Risultante r e momento risultante m, le variabili dinamiche
globali di un dato sistema di forze e coppie, sono rispettivamente coniugate
– nel senso della nozione di potenza spesa – alle variabili cinematiche che
parametrizzano la classe dei movimenti (≡ atti di moto) rigidi, vale a dire,
wo , che specifica quelli traslatorii, e ωo , che specifica quelli rotatorii. Per questo motivo, anche in statica, quelle variabili dinamiche globali sono quantità
significative.
12 Sistemi bilanciati di forze e coppie. Equazioni
cardinali
Un sistema di forze e coppie si dice bilanciato se spende potenza nulla in
ogni atto di moto rigido (10.4). In particolare, un sistema di forze e coppie
bilanciato applicato ad un corpo rigido spende potenza nulla in ogni istante
di ogni moto del corpo. Vale il seguente risultato di caratterizzazione:
Un sistema S di forze e coppie è bilanciato se e solo se soddisfa le cosidette
equazioni cardinali della statica del corpo rigido:
r = 0 & m = 0 .2
(12.1)
Basta un’occhiata a (11.2) per verificare che, se valgono le equazioni (12.1),
allora il sistema in esame è bilanciato. Il converso si dimostra osservando che,
se
r · wo + m · ω o = 0 ∀ wo , ωo ∈ V,
allora, ponendo in questa relazione ω o = 0 [wo = 0] e valendosi dell’arbitrarietà di scelta di wo [ω o ] si conclude che r = 0 [m = 0].
2
Scrivendo la seconda delle equazioni cardinali, non val la pena di precisare il polo
rispetto al quale si calcola il momento risultante, dato che la prima equazione
garantisce che la scelta del polo è ininfluente.
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
12 Sistemi bilanciati di forze e coppie. Equazioni cardinali
65
Osservazione. Si usa dire che la prima equazione cardinale esprime ‘l’equilibrio alla traslazione’, perchè, come abbiamo visto, la si ottiene imponendo
l’annullarsi della potenza per ogni atto di moto traslatorio; per una ragione
del tutto analoga, si dice che la seconda equazione esprime ‘l’equilibrio alla
rotazione’.
Esercizi
12.1. Scelto un riferimento cartesiano ortonormale di origine O, si consideri
un campo di velocità v tale che:
v (A) = v(e1 + e2 ), A ≡ (0, 0, 0);
v (B) = v(e1 + 2e2 ), B ≡ l(1, 0, 0);
v (C) = v(2e1 + e2 ), C ≡ l(0, 1, 0).
Mostrare che il campo v non è un atto di moto rigido.
Soluzione. Una proprietà saliente dei campi di velocità che sono atti di moto
rigido è che, comunque vengano scelti due punti P , Q, si ha sempre:
−−
⇀
(v (P ) − v (Q)) · P Q = 0
(si richiami la relazione (10.2)). Dunque, perché v sia rigido è necessario che
siano soddisfatte le seguenti tre condizioni:
−−
⇀
(v (A) − v (B)) · AB = 0,
−⇀
(v (A) − v (C)) · AC = 0,
−−⇀
(v (B) − v (C)) · BC = 0.
Un semplice calcolo mostra che v non soddisfa la terza di queste. Infatti:
−−⇀
−−⇀
v (B) · BC = lv = −v (C) · BC .
12.2. Un cubo rigido di spigolo l ha ad un certo istante un vertice nell’origine
e spigoli paralleli agli assi cartesiani (Fig. 3.23); in quell’istante, è nota la
velocità dei punti Po ≡ O, P1 e P2 :
v (O) = ve3 ,
v (P1 ) = ve2 ,
v (P2 ) = −ve1 ,
dove v è un numero reale assegnato. Si determinino la velocità angolare ω del
cubo e la velocità del suo punto P3 ≡ l(1, 1, 1).
Soluzione. Dalla formula generale (10.6), otteniamo:
−−⇀
v (Pi ) = v (O) + ω × OP i ,
dunque,
i = 1, 2 ;
ve2 = ve3 + ω × (le1 ),
−ve1 = ve3 + (lω × e2 ).
Moltiplicando scalarmente per e2 e per e3 ambo i membri della prima
equazione, troviamo:
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
66
3 Statica del Corpo Rigido
Figura 3.9.
v
= ω · e2 ;
l
moltiplicando scalarmente per e1 la seconda equazione, troviamo:
v
ω · e1 = − .
l
In definitiva, la velocità angolare cercata è il vettore
v
ω = (−e1 + e2 + e3 ).
l
Quanto alla velocità del punto P3 , essa risulta essere:
ω · e3 =
v (P ) = v(2e2 − e3 ) ,
come mostra un facile calcolo basato sulla rappresentazione del campo di
velocità in un punto P generico del cubo:
−−⇀
v (P ) = v (O) + ω × OP = (ve3 ) + vl ω × (xi ei )
v
= (x3 − x2 )e1 + (x1 + x3 )e2 + (l − x1 − x2 )e3 ) .
l
12.3. Si supponga che al cubo rigido di cui all’esercizio precedente sia applicata
la coppia di forze (Q1 , f1 ), (Q2 , f2 ), con
Q1 ≡ l(1, 0, 0), f1 = f e1 ;
Q2 ≡ l(0, 1, 0), f2 = −f e1 .
Calcolare la potenza spesa.
Soluzione. Si ha r = 0, m = c, dove c è il vettore momento risultante della
coppia di forze:
−−−⇀
−−−⇀
c = Q1 Q2 × (−f e1 ) , Q1 Q2 = l(−e1 + e2 ) .
La potenza spesa è dunque:
v
ω · c = (−e1 + e2 + e3 ) · l(−e1 + e2 ) × (−f e1 ) = f v .
l
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
13 Vincoli esterni
67
13 Vincoli esterni
Ci si potrebbe chiedere per quale motivo sia stata introdotta la nozione di
sistema bilanciato di forze e coppie quando si sarebbe potuto caratterizzare tali
sistemi come quelli che soddisfano le equazioni cardinali. Il motivo principale
è che, procedendo in questo modo, si conferisce alla statica del corpo rigido
un formato che si presta meglio a successive generalizzazioni (tra quelle che
compiremo, in particolare, la statica dei sistemi di corpi rigidi e quella di
classi di corpi in vario modo deformabili). Un altro motivo importante è che,
procedendo in termini di potenza spesa in un atto di moto invece che in termini
di equazioni di bilancio, si può agevolmente formulare una caratterizzazione
costitutiva convincente dei vincoli esterni, cioè, delle restrizioni di movimento
indotte in uno o più punti di un corpo dalla presenza dell’ambiente esterno al
corpo medesimo.
Ci proponiamo di descrivere soltanto un tipo, speciale ma importante, di
vincoli esterni posizionali, quelli che sono:
1) bilaterali, cioè, tali da impedire spostamento e rotazioni qualunque ne sia
il verso o il senso (come fanno i doppi binari sui quali corrono i carrelli delle “montagne russe”). I vincoli unilaterali, come l’appoggio su una
superficie (Fig. 3.10), impediscono lo spostamento in un verso e non in
Figura 3.10.
quello opposto: il piano d’appoggio è in grado di sostenere il corpo, ma
non di trattenerlo se viene sollevato;
2) lisci, cioè, privi di attrito. La reazione esercitata da una superficie liscia è
normale alla superficie stessa. Se il vincolo è scabro, nella configurazione
di equilibrio, la reazione è contenuta all’interno del cono d’attrito e presenta quindi una componente normale al piano d’appoggio e una parallela,
entrambe in genere non nulle;
3) perfetti, cioè, tali da esercitare una reazione comunque grande (un vincolo
imperfetto fornirebbe una risposta limitata in modulo, un comportamento che potrebbe avere conseguenze spiacevoli nel caso delle “montagne
russe” ma anche, invece, suggerire il criterio di progetto di dispositivi di
rilassamento di una restrizione di mobilità).
In termini generali, la caratterizzazione che adopereremo per questo tipo
di vincoli è la seguente: il sistema di una forza e una coppia di reazione, che la
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
68
3 Statica del Corpo Rigido
presenza di un vincolo cinematico esterno può far nascere in corrispondenza
del punto del corpo dove il vincolo è imposto, spende potenza nulla su ogni
atto di moto rigido compatibile con il vincolo stesso. Procediamo adesso ad
applicare questo criterio per descrivere il modello di funzionamento dei più
semplici e importanti di questi vincoli.
Osservazione. Ancorchè in questo libro abbiamo fin qui applicato, e nell’immediato applicheremo, vincoli esterni soltanto a corpi rigidi, non sarà necessario cambiarne la caratterizzazione quando li considereremo applicati ad altre
classi di corpi: essa è infatti indipendente dalla natura dei corpi cui i vincoli
vengono imposti.
13.1 Vincoli spaziali
Cerniera Sferica. Nel caso di un corpo ambientato in uno spazio euclideo
tridimensionale e vincolato nel punto A da una cerniera, gli atti di moto
ammissibili (≡ compatibili con la presenza della cerniera) hanno la forma:
−⇀
w (P ) = ω × AP ,
ω∈V ,
(13.1)
sono, cioè, atti di moto rotatorio attorno al punto fisso A. Indicando con rA
Figura 3.11.
e cA la forza e la coppia di reazione possibili, la potenza da loro spesa in un
qualunque atto di moto di tipo (13.1) è nulla se
rA · 0 + cA · ω = 0 ∀ ω ∈ V ,
cioè, se
ca = 0 ;
quindi, una cerniera tridimensionale può fornire una qualunque forza di
reazione applicata nel punto dove quel vincolo è imposto.
Cerniera Cilindrica. Questo vincolo consente traslazioni lungo l’asse per B
diretto come e e rotazioni intorno a quello stesso asse. Gli atti di moto rigido
ammissibili hanno pertanto la forma seguente:
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
13 Vincoli esterni
69
Figura 3.12.
−−⇀
w (P ) = βe + ω e × BP , β, ω ∈ R;
(13.2)
in particolare, quindi,
v (B) = βe , β ∈ R.
La potenza spesa dalla forza e coppia reattive in un atto di moto rigido di
tipo (13.2) è nulla se
rB · (βe) + cB · (ωe) = 0 ∀ β, ω ∈ R .
Perciò, una cerniera cilindrica può esplicare reazioni qualunque, purchè nel
piano per B di normale e:
rB = rB e ⊥
&
cB = cB e ⊥ , rb , cB ∈ R
(qui e ⊥ è un qualunque vettore perpendicolare ad e).
Carrello/Pendolo Semplice. In Fig. 3.13 sono mostrate due equivalenti
rappresentazioni grafiche della seguente condizione di vincolo sugli atti di
moto ammissibili:
w (A) · n(A) = 0 ,
(13.3)
dove n(A) indica la normale in A alla superficie3 su cui il carrello è lasciato
Figura 3.13.
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
70
3 Statica del Corpo Rigido
libero di muoversi [il versore dell’asse del pendolo]. Gli atti di moto compatili
con il vincolo sono dunque:
−⇀
w (P ) = wA n ⊥ (A) + ω × AP ,
wA ∈ R, ω ∈ V.
(13.4)
La caratterizzazione delle reazioni vincolari in termini di potenza assume
quindi la forma seguente:
wA rA · n ⊥ (A) + cA · ω = 0 ∀ wA ∈ R, ω ∈ V .
Questa condizione è equivalente alle due che seguono:
rA = rA n(A), rA ∈ R,
&
cA = 0 ,
il cui significato è che la forza reattiva dev’essere perpendicolare alla superficie
sulla quale si muove il carrello [diretta come l’asse del pendolo], mentre la
coppia reattiva è sempre nulla.
Osservazione. Confrontando cerniera sferica e carrello si nota che, nel secondo caso, ad una collezione più ampia di atti di moto ammissibili corrisponde
una più ristretta collezione di possibili reazioni vincolari.
13.2 Vincoli piani
Nel caso di corpi bidimensionali cui siano imposti vincoli esterni che ne limitano le posizioni nel proprio piano di appartenenza, ogni sistema di forze e
coppie reattive dev’essere piano, proprio come è piano il sistema delle forze e
coppie attive. In un punto A del corpo che sia vincolato, devono quindi essere
soddisfatte le seguenti relazioni:
rA · n = 0 &
cA × n = 0 ⇔ cA = cA n, cA ∈ R ,
(13.5)
dove n indica la normale al piano del sistema. Vediamo adesso come queste
informazioni generali sulla coppia (rA , cA ) si precisino ulteriormente per i
diversi tipi di vincolo piano.
Cerniera. Questo vincolo impedisce qualunque traslazione e consente la rotazione intorno al punto fisso A. Gli atti di moto ammissibili hanno quindi
l’aspetto:
−⇀
w (P ) = ω A n × AP , ω A ∈ R .
Per caratterizzare le reazioni rA e cA , richiediamo loro di soddisfare la
relazione:
rA · 0 + (cA n) · (ω A n) = 0 , ω A ∈ R,
che implica:
cA = 0 .
3
Il più delle volte, un piano.
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
13 Vincoli esterni
71
Figura 3.14.
Dunque, una cerniera piana può reagire con una forza rA arbitraria appartenente al piano del corpo, ma non può esercitare alcuna coppia di
reazione.
Carrello/Pendolo semplice. Il carrello [pendolo semplice] impedisce la traslazione nella direzione perpendicolare alla curva di scorrimento [al proprio
asse], mentre consente quella in direzione parallela, nonché la rotazione intorno ad A. Gli atti di moto ammissibili hanno la forma (13.4), dove n ⊥ (A) va
Figura 3.15.
interpretato come un vettore tangente alla curva di scorrimento nel punto di
vincolo [un vettore parallelo all’asse del pendolo]. Perciò,
rA = rA nA , rA ∈ R
&
cA = 0 .
Incastro Scorrevole/Pendolo doppio. Un incastro scorrevole impedisce
sia la traslazione nella direzione n(A) perpendicolare alla via di corsa della
Figura 3.16.
slitta [nella direzione n(A) dell’asse dei pendoli] che la rotazione attorno ad
A. Gli atti di moto ammissibili sono:
w (P ) = w (A) = wA n ⊥ (A) ,
n ⊥ (A) · n(A) = 0 .
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
72
3 Statica del Corpo Rigido
Se si richiede che la potenza reattiva spesa su un arbitrario atto di moto
compatibile con questo vincolo si annulli:
rA · (wA n ⊥ (A)) + cA n · 0 = 0 , ∀ wA ∈ R,
si ottiene che l’incastro scorrevole reagisce con una forza parallela alla normale
alla via di corsa della slitta [all’asse dei pendoli] e con una coppia cA = cA n,
entrambe di intensità e verso arbitrari.
Incastro. Questo vincolo (Fig. 3.17) proibisce al corpo qualunque movimento nel proprio piano e fornisce quindi una forza e una coppia di reazione
arbitrarie, purché compatibili con le limitazioni generali (13.5).
Figura 3.17.
Esercizi
13.1. Determinare gli atti di moto ammissibili e le reazione possibili per il
vincolo consistente in due doppi pendoli con assi ortogonali rappresentato in
Fig. 3.18.
Figura 3.18.
Soluzione. Qualunque atto di moto traslatorio è ammissibile. Dunque, l’unica
reazione possibile è una coppia cA = cA n, di intensità e verso arbitrari.
14 Metodo delle forze e metodo delle potenze
Come sappiamo fin dalla Sez. 9, date le forze attive che sollecitano un corpo
rigido e dati i vincoli esterni che ne limitano i movimenti nello spazio ambiente, il problema statico consiste: (a) nel determinare se esistano per quel
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
14 Metodo delle forze e metodo delle potenze
73
corpo configurazioni di equilibrio, cioè, configurazioni nelle quali le reazioni
vincolari e le forze attive costituiscono un sistema bilanciato; (b) nel calcolare
le reazioni vincolari e (c) nel qualificare la stabilità dell’equilibrio in ciascuna
delle configurazioni trovate.
Ci sono tre metodi per risolvere il problema statico: il metodo delle forze e
il metodo delle potenze, che adesso esporremo, e il metodo del potenziale, che
esporremo nella prossima sezione. Tanto il metodo delle forze che quello delle
potenze consentono di risolvere le parti (a) e (b) del problema statico; con
il secondo metodo, che per questo spesso si fa preferire, si può far precedere
la risoluzione di (a) a quella di (b), per poi procedere direttamente, se cosı̀
si vuole, allo studio di (c). Se le forze attive sono di tipo conservativo (una
nozione che sarà introdotta nella Sez. 15), il metodo del potenziale consente
di risolvere assieme le parti (a) e (c).
14.1 Ricerca di configurazioni di equilibrio
Riprendiamo in esame il primo esempio considerato nella Sez. 9. In quel caso, il
principio di equilibrio, che avevamo provvisoriamente postulato per affrontare
il problema statico, ci aveva condotto a scrivere le equazioni (9.1) – la versione
delle equazioni cardinali (12.1) valevole per il problema all’esame – le quali
impongono e insieme specificano in quale configurazione sia possibile il bilancio
tra la forza attiva e quella reattiva.
Abbiamo cosı̀ applicato il metodo delle forze, che consiste nel compiere
in successione i passi seguenti: (1) compiere un’analisi dei vincoli esterni e
assegnare tentativamente ad ognuno di essi l’ufficio di fornire, in risposta ai
carichi applicati (≡ il sistema attivo di forze e coppie), il sistema di forza e
coppia reattive più complesso tra quelli che costitutivamente gli competono;
(2) con il corpo che occupa una posizione generica tra quelle consentite dai
vincoli, imporre che il sistema di tutte le forze ad esso applicate, attive e
reattive, sia bilanciato, cioè, soddisfi le equazioni cardinali della statica. Cosı̀
facendo, queste ultime vengono a contenere due tipi di incognite: parametri di
reazione e parametri di configurazione; e si tratta quindi di vedere se esistano
soluzioni, e quante e quali esse siano.
Osservazione. Per decidere sull’esistenza di soluzioni, un’informazione importante è sempre il numero totale di incognite. Ora, mentre il numero di parametri di reazione dipende evidentemente dal problema in esame, il numero
massimo di parametri di configurazione è fisso: 6 se il problema è tridimensionale, 3 se è piano. Si richiami, infatti, l’espessione (11.2) della potenza spesa
da un generico sistema di forze e coppie in un atto di moto rigido: per un
corpo rigido tridimensionale, i parametri di configurazione, e cioè, i parametri
scalari che ne fissano la posizione nello spazio ambiente (i suoi gradi di libertà)
sono tanti quanti le componenti di wo , ωo ; altrettanti sono i parametri globali
di sollecitazione, e cioè, le componenti delle grandezze dinamiche r , m.
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
74
3 Statica del Corpo Rigido
Nel caso di un corpo rigido contenuto in un piano di normale n, cui siano
applicati sistemi di forze e coppie piani e che sia assoggettato a vincoli piani,
i gradi di libertà sono 3 (le componenti non obbligatoriamente nulle sono
due per wo , perchè wo · n = 0, una per ωo , perchè ω o × n = 0); due sono
quindi le componenti scalari non obbligatoriamente nulle di r , una di m. Ad
esempio, per l’asta rigida dell’Esempio 1 di Sez. 9, il parametro di reazione è
rA , mentre per quello di configurazione si può, ad esempio, scegliere l’angolo
−
−
⇀
che il vettore AB forma con la verticale; fortunatamente, le equazioni cardinali
consentono di determinare entrambi i parametri, il primo in modo unico, il
secondo duplice.
Affrontiamo ora il problema di ricerca delle configurazioni di equilibrio per
quell’asta in modo diverso, imponendo che sia nulla la potenza di tutte le forze
agenti sul sistema per qualsiasi atto di moto rigido compatibile con il vincolo.
È evidente che, in questo modo, la potenza spesa dalla reazione vincolare sarà
comunque nulla di per sé. Poichè gli atti di moto che la cerniera consente
hanno la forma
−⇀
w (P ) = ω o n × AP ,
la potenza spesa dalla forza applicata risulta essere:
−−
⇀
0 = f · w (B) = ω o n · AB × f .
Visto che questa relazione deve valere per ogni scelta di ω o ∈ R, e visto che il
−
−
⇀
−−
⇀
vettore AB × f è parallelo a n (perchè tanto AB che f sono perpendicolari a
n), la condizione si può soddisfare solo se:
−
−
⇀
AB × f = 0 .
Le posizioni di equilibrio sono quindi quelle rappresentate in Fig. 3.1.b.
Generalizzando sulla base di questo esempio, possiamo descrivere cosı̀ il
metodo delle potenze per la ricerca di configurazioni di equilibrio: (1) si imponga che sia nulla la potenza di tutte le forze e coppie agenti sul sistema per
qualsiasi atto di moto rigido compatibile con i vincoli esterni, ottenendo una
condizione scalare, che non coinvolge i parametri di reazione vincolare, ma solo
quelli di configurazione; (2) poichè la condizione ottenuta deve essere soddisfatta qualunque siano i valori dei parametri che definiscono gli atti di moto
compatibili, si sfrutti questa quantificazione per ottenere un sistema equivalente di (una o più) equazioni scalari negli incogniti parametri di configurazione; tale sistema racchiude tutta l’informazione conseguibile sull’esistenza e
l’eventuale molteplicità delle configurazioni di equilibrio.
14.2 Ricerca di reazioni vincolari
Per cominciare, compiamo la ricerca delle reazioni vincolari nel caso dell’asta
di Sez. 9, in ognuna delle due possibili configurazioni di equilibrio (Fig. 3.1.b).
A questo scopo, scelta la configurazione in Fig. 3.19 a sinistra, imponiamo che
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
14 Metodo delle forze e metodo delle potenze
75
Figura 3.19.
sia nulla la potenza spesa dalle forze applicate, attiva e reattiva, in presenza
di un atto di moto rigido non compatibile con i vincoli: ad esempio, per un
qualunque punto P dell’asta,
w (P ) = wo .
La condizione che imponiamo è dunque:
f · w (B) + rA · w (A) = (f + rA ) · wo = 0
∀ wo ,
donde la conclusione espressa dalla prima delle equazioni (9.1). Inutile dire che
la stessa conclusione si raggiunge quando si consideri l’altra configurazione di
equilibrio possibile.
Ancora una volta generalizzando, possiamo descrivere cosı̀ il metodo delle
potenze per la ricerca delle reazioni vincolari: (1) scelta una configurazione di
equilibrio tra quelle possibili, si imponga che sia nulla la potenza di tutte le
forze e coppie agenti sul sistema, attive e reattive, per qualsiasi atto di moto
rigido incompatibile con i vincoli esterni, ottenendo una condizione scalare,
che coinvolge soltanto i parametri di reazione vincolare; (2) poichè questa
condizione deve valere qualunque siano i valori dei parametri che definiscono
gli atti di moto compatibili, si sfrutti questa quantificazione per ottenere un
sistema equivalente di (una o più) equazioni scalari negli incogniti parametri
di reazione, che racchiude tutta l’informazione conseguibile su di essi.
Osservazione. Tanto il metodo delle forze che quello delle potenze per presuppongono un’accurata analisi dei vincoli, da un doppio e complementare
punto di vista: dinamico, per stabilire che sistema di forze e coppie reattive
ci si possa attendere; cinematico, per stabilire quali atti di moto rigido siano
compatibili con i vincoli e quali no.
Esercizi
14.1. Ricercare le posizioni di equilibrio del cubo rigido pesante rappresentato
in Fig. 3.20, che è vincolato in A da una cerniera sferica, in B da una cerniera
cilindrica.
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
76
3 Statica del Corpo Rigido
Figura 3.20.
Soluzione. Detta ρ(P ) > 0 la densità di massa del cubo, la forza per unità di
volume applicata nel suo punto tipico P è:
df (P ) = ρ(P )g d(vol),
dove g è il vettore dell’accelerazione di gravità, supposta costante; il baricentro
del cubo è il punto G tale che
Z
Z
1
−⇀
−⇀
AG :=
ρ(P )AP d(vol), M :=
ρ(P ) d(vol).
M cubo
cubo
La collezione di atti di moto rigido compatibili con i vincoli è:
−⇀
w (P ) = ω × AP , ω = ωe, ω ∈ R.
Affinché sia nulla la potenza delle forze esterne in ogni atto di moto rigido
compatibile, occorre dunque che:
Z
−⇀
−⇀
0=
ρ(P )g · ω × AP d(vol) = ωM g · e × AG ∀ ω ∈ R,
cubo
cioè, che il baricentro venga a trovarsi nel piano per A individuato dai vettori
g e e.
14.2. Il cubo rigido e privo di peso Crig rappresentato in Fig. 3.21 è vincolato
in A e C con un pendolo verticale e in B con una cerniera sferica; la forza
f è applicata in un punto P arbitrario della faccia superiore. Si determinino
le configurazioni di equilibrio in funzione della posizione del carico; quando
l’equilibrio è possibile, si determini il valore delle reazioni dei vincoli.
Soluzione. Risolviamo il primo quesito con il metodo delle potenze, il secondo
con il metodo delle forze.
Nel sistema di riferimento rappresentato in figura,
P ≡ (x1 , x2 , 0) ,
f = f e3 , f > 0 .
Per trovare la forma di un generico atto di moto rigido compatibile con i
vincoli esterni, osserviamo che la cerniera sferica impone al corpo di ruotare
intorno a B; quindi,
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
14 Metodo delle forze e metodo delle potenze
77
Figura 3.21.
−−⇀
w (Q) = ω × BP ,
Q ∈ Crig .
D’altra parte, i pendoli in A e C impongono, rispettivamente, che w (A) e
w (C) siano contenute nei piani per A e C perpendicolari a e3 :
−
−
⇀
e3 · ω × BA = 0 ,
−−⇀
e3 · ω × BC = 0 ,
−
−
⇀
BA = −h(e1 + e2 );
−−⇀
BC = he3
(per convincersi che proprio questo è il risultato della presenza di questi vincoli
può essere utile tornare a dare un’occhiata alla Fig. 3.5). La seconda di queste
relazioni è verificata banalmente e non pone alcuna condizione sulla scelta
degli atti di moto. Invece, dalla prima relazione, ricaviamo:
e3 · ω × (−h(e1 + e2 )) = 0 ⇒ ω · (e1 + e2 ) × e3 = 0 ⇒ −ω2 + ω1 = 0 .
Il vettore velocità angolare deve quindi avere l’aspetto seguente:
ω = ω(e1 + e2 ) + ω 3 e3 ,
ω, ω 3 ∈ R.
Allora, perchè sia comunque nulla la potenza spesa dalla forza f , dev’essere:
−−⇀ −−⇀
0 = f ·w (P ) = (f e3 )·(ω(e1 +e2 )+ω3 e3 )× BP , BP = (x1 −h)e1 +(x2 −h)e2 ,
qualunque valore reale assumano ω, ω 3 . Svolgendo i calcoli si ottiene :
x1 = x2 ;
dunque, si può avere equilibrio solo se la forza f è applicata ad un punto della
bisettrice degli assi 1 e 2.
Per determinare le reazioni vincolari in una delle configurazioni di equilibrio possibili, consideriamo il piano di simmetria del sistema (Fig. 3.22), nel
quale agiscono tutte le forze attive e reattive rilevanti. L’analisi dei vincoli
ci dice che le reazioni devono essere verticali tanto in A che in C, mentre la
reazione della cerniera in B può anche avere una componente orizzontale.
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
78
3 Statica del Corpo Rigido
Figura 3.22.
Dall’equilibrio alla rotazione intorno a B ricaviamo la reazione in A:
√
rA 2h − f ξ = 0
⇒
ξ
rA = −f √ e3 ;
2h
inoltre, la componente orizzontale della reazione in B dev’essere nulla, perchè sussista l’equilibrio alla traslazione orizzontale. Tuttavia, la condizione di
equilibrio alla traslazione verticale, che pure dev’essere verificata, non basta a
calcolare le reazioni verticali in B e in C neppure conoscendo il valore di rA :
infatti,
rA + rB + rC + f · e3 = 0
⇒
ξ
rB + rC + (1 − √ )f = 0 .
2 h
14.3. Alla trave rigida in figura è applicata la coppia esterna (Q, c = −ce3 ),
−⇀
con AQ = αe1 , 0 < α < 1 e c > 0. Si calcolino le reazioni vincolari.
Figura 3.23.
Soluzione. L’analisi dei vincoli mostra che le reazioni vincolari possibili sono:
rA = rA1 e1 + rA2 e2 ,
rB = rB e2 .
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
15 Metodo del potenziale. Equilibrio stabile, instabile, indifferente.
79
Per determinare le incognite rA1 , rA2 , e rB con il metodo delle potenze,
presumiamo di assegnare alla trave un atto di moto rigido
−⇀
w (P ) = w (A) + ωe3 × AP ,
w (A) · e3 = 0, ω ∈ R,
in corrispondenza del quale il sistema di forze e coppie applicato alla trave
compie sempre potenza nulla se
−
−
⇀
rA · w (A) + rB · (w (A) + ωe3 × AB) + c · (ωe3 ) = 0
∀ w (A) · e3 = 0, ω ∈ R.
La condizione precedente si può scrivere nel modo equivalente:
−−
⇀
w (A) · (rA + rB ) + ω rB · e3 × AB − c = 0 ∀ w (A) · e3 = 0, ω ∈ R,
ovvero
rA + rB = 0 ⇔
rA1 = 0, rA2 + rB = 0
&
rB l − c = 0.
Val la pena di osservare che, visto che la trave è rigida, la posizione del punto
Q non ha alcuna rilevanza nella risoluzione del problema di equilibrio.
15 Metodo del potenziale. Equilibrio stabile, instabile,
indifferente.
Cominciamo con un esempio elementare, non troppo diverso dal primo esempio considerato in Sez. 9. Consideriamo un pendolo semplice (Fig. 3.24),
schematizzato come un’asta rigida priva di peso incernierata in un estremo,
Figura 3.24.
cui è applicata nell’altro estremo la forza peso f = mg dovuta ad una massa
m > 0 soggetta all’accelerazione di gravità g = −ge2 , g > 0 .
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
80
3 Statica del Corpo Rigido
La forza peso è conservativa: questo aggettivo connota ogni forza cui si
può associare un potenziale, vale a dire, una funzione scalare della posizione
Φ = Φ(x1 , x2 , x3 ) tale che
f = −∇Φ,
∇Φ = (∂xi Φ)ei .4
Nel caso della forza peso e del problema piano in esame, tale funzione
potenziale è (a meno di una costante additiva inessenziale):
Φ(x1 , x2 ) = mΓ (x1 , x2 ),
Γ (x1 , x2 ) = gx2 ,
(x1 , x2 ) ∈ R2 ,
dove Γ è il potenziale associato all’accelerazione di gravità:
g = −∇Γ = −ge2 ,
cioè, alla forza peso per unità di massa.
Prendiamo atto di due fatti, che sono manifestazioni in questo caso
particolare di proprietà che riconosceremo valide un po’ più avanti:
-
visto che ∇Φ(x1 , x2 ) = mge2 , nelle posizioni di equilibrio del pendolo si
ha che ∇Φ · e1 = 0, dove e1 è la comune direzione, in quelle posizioni, delle
velocità compatibili con il vincolo;
nella posizione di equilibrio superiore, che ci appare instabile, Φ(0, h) =
mgh = max; in quella inferiore, che ci appare stabile, Φ(0, −h) = −mgh =
min.
-
L’aspetto comune ai due fatti è che entrambi vengono descritti in termini del
potenziale, una funzione che incorpora tutta l’informazione rilevante tanto
per stabilire quali siano le soluzioni del problema di equilibrio quanto per
qualificarne la natura.
Osservazioni. 1. La situazione appena descritta è caratteristica di quei sistemi meccanici che, come il pendolo dell’esempio, siano soggetti esclusivamente
a forze conservative nel corso dei moti che i vincoli esterni non escludono.
L’idea generale retrostante è che, per questi sistemi, la grandezza meccanica
primaria è il potenziale, non la forza, che è una nozione secondaria, ottenuta
dalla prima; e che, dunque, in termini di proprietà del potenziale si debba
descrivere il comportamento di questi sistemi.
2. Nell’ambito della Statica, non c’è ambiguità né difficoltà a qualificare la natura delle posizioni d’equilibrio soltanto nel caso di sistemi soggetti a forze conservative. In Dinamica, la questione può essere trattata in modo soddisfacente
in tutti i casi.
Per tradurre l’idea esposta nella prima delle Osservazioni precedenti in un
criterio di risoluzione del problema di equilibrio, conviene introdurre le nozioni
matematiche di derivata direzionale e gradiente di un campo scalare.
4
Il simbolo ∇ si legge “nabla”.
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
15 Metodo del potenziale. Equilibrio stabile, instabile, indifferente.
81
Dato un campo scalare regolare Ψ = Ψ (P ), definito in ogni punto P di un
insieme aperto dello spazio euclideo E, ∂d Ψ (P ), la derivata direzionale di Φ
nella direzione d , è cosı̀ definita:
∂d Ψ (P ) := lim
δ→0
Ψ (P + δd ) − Ψ (P )
,
δ
|d | = 1 ;
dunque, la derivata direzionale è per definizione il numero reale che si ottiene
quando esiste finito il limite che appare nella relazione precedente e che ne
fornisce l’interpretazione: ∂d Ψ (P ) ci dice come tende a variare il valore del
campo Ψ quando ci si allontana da P in direzione d . Il gradiente di Ψ nel
punto P è per definizione il vettore ∇Ψ (P ) tale che
∇Ψ (P ) · d := ∂d Ψ (P ) per ogni direzione d .
Per calcolarne gradiente e derivate direzionali, è spesso conveniente pensare il
campo Ψ come una funzione delle coordinate cartesiane del punto tipico P :
Ψ = Ψ̂ (x1 , x2 , x3 ).
Allora, ∇Ψ è il vettore che ha per componenti le derivate parziali di Ψ :
(∇Ψ )i =
∂Ψ
(= ∂xi Ψ ) ,
∂xi
mentre la derivata in direzione d = di ei di Ψ vale
∂d Ψ(x1 , x2 , x3 ) = di ∂xi Ψ(x1 , x2 , x3 ).
Siamo ora in grado di formalizzare la relazione tra il metodo delle potenze
per la ricerca di posizioni di equilibrio e la nozione di potenziale. La potenza
spesa da una generica forza conservativa (P, f ) di potenziale Φ vale:
f (P )·v (P ) = −∇Φ(P )·v (P ) = −a ∂a Φ,
dove a = |v (P )| e a = vers (v (P ));
dunque, quella potenza si annulla se e solo se si annulla la derivata del
potenziale nella direzione della velocità del punto di applicazione della forza.
Nel caso del pendolo semplice,
−f (P ) ≡ ∇Φ = mg e2 ,
∂d Φ = mg(e2 · d );
quindi,
∂d Φ = 0
⇔
d k e1 .
Poichè la velocità del punto B di applicazione della forza peso in un atto di
moto rigido compatibile con il vincolo è:
−−
⇀
v (B) = ω × AB = ω(x1 e2 − x2 e1 ),
x1 = h sin ϕ, x2 = h(1 − cos ϕ),
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
82
3 Statica del Corpo Rigido
la velocità di B è parallela a e1 se e solo se x1 = 0, cioè, se e solo se il pendolo
si trova in una delle due sue configurazioni di equilibrio;5 questo risultato
si può formulare dicendo che il potenziale della forza peso è stazionario in
corrispondenza ad una configurazione di equilibrio, intendo con questo che il
potenziale ha derivata nulla nella direzione ammissibile.
Più in generale, per la ricerca e la qualificazione delle configurazioni di
equilibrio vale il
Criterio di Dirichlet. Le configurazioni di equilibrio di un corpo rigido
(in generale, di un sistema meccanico con un numero finito di gradi di libertà)
soggetto a forze conservative sono quelle in cui il potenziale è stazionario
(≡ ha derivata nulla) in tutte le direzioni ammisssibili. L’equilibrio è stabile [instabile] nelle configurazioni di minimo [massimo] locale del potenziale,
altrimenti è indifferente.
Dato il potenziale, il campo di forze ad esso associato si ottiene per semplice differenziazione. Per ottenere il potenziale dato il campo di forze, possono
essere utili le considerazioni che seguono.
Si supponga in moto il punto P di applicazione della forza conservativa
f (P ); si indichi con Ṗ (t) il valore corrente della derivata dell’applicazione
t 7→ P (t) che descrive il moto di P , valore che coincide con la velocità corrente
di P : Ṗ (t) ≡ v (P, t); e si ottengano per composizione le funzioni t 7→ f (P (t))
e t 7→ Φ(P (t)). Allora,
dΦ
= ∇Φ(P (t)) · Ṗ (t) = −f (P (t)) · v (P, t).
dt
(15.1)
Si vede perciò che la funzione potenziale si può ottenere con un’integrazione
formale rispetto al tempo:
Z t
Φ(P ) = Φ(P0 ) −
f (P (s)) · v (P, s) ds, dove P = P (t), P0 = P (t0 ).
t0
Se il campo di forze è assegnato in funzione delle coordinate cartesiane:
f (P ) = fi (x1 , x2 , x3 )ei ,
nulla vieta, naturalmente, di costruire il relativo potenziale per integrazione
del seguente sistema di equazioni alle derivate parziali del primo ordine:
∂xi Φ = −fi , i = 1, 2, 3.
(15.2)
Questa costruzione è possibile solo se i dati rispettano le seguenti condizioni:
∂xj fi = ∂xi fj
∀ i 6= j.
(15.3)
Esercizi
15.1. Si consideri l’asta rigida pesante in Fig. 3.26, di lunghezza l e densità
di massa per unità di lunghezza uniforme ρ > 0, incernierata a distanza α l
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
15 Metodo del potenziale. Equilibrio stabile, instabile, indifferente.
83
Figura 3.25.
dall’estremo A. Si mostri che, se α 6= 1/2 ci sono due sole configurazioni
di equilibrio, l’una stabile, l’altra instabile; e che per α = 1/2 l’equilibrio è
indifferente.
Soluzione. Si prenda l’angolo ϕ come parametro di configurazione e si individuino i punti dell’asta
per mezzo della loro ascissa rispetto alla cerniera:
ξ ∈ − αl, (1 − α)l , di modo che
−−⇀
OP = ξe(ϕ),
e(ϕ) := cos ϕe1 − sin ϕe2 ,
ϕ ∈ [0, 2π);
allora, in un moto compatibile con il vincolo,
Ṗ = ξe ′ (ϕ)ϕ̇ = −ξ ϕ̇(sin ϕe1 + cos ϕe2 ).
D’altra parte, la forza peso agente sull’elemento d’asta vale
df (P ) = −ρge2 dξ;
quindi, la potenza spesa sull’intera asta dalla forza esterna vale:
Z
Z (1−α)l
v (P, t) · df (P, t) = ρg cos ϕ ϕ̇
ξ dξ
αl
αl
1
d 1 2
= ρgl2 (1 − 2α) cos ϕ ϕ̇ =
ρgl (1 − 2α) sin ϕ ;
2
dt 2
(1−α)l
in vista della relazione (15.1), questa potenza dev’essere pari all’opposto della
derivata temporale del potenziale totale delle forze esterne, che quindi vale:
1
Ψ (ϕ) = − ρgl2 (1 − 2α) sin ϕ + cost.
2
Allora, se α = 1/2, il potenziale è costante e tutte le determinazioni del parametro di configurazione ϕ individuano configurazioni di equilibrio indifferente;
altrimenti, se (1 − 2α) > 0, il potenziale è minimo e l’equilibrio stabile per
ϕ = π/2, mentre per ϕ = −π/2 il potenziale è massimo e l’equilibrio instabile;
le modifiche da fare per trattare il caso (1 − 2α) < 0 sono ovvie.
5
x1 = 0 ⇒ ϕ = 0, π ⇒ x2 = 0, 2h.
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
84
3 Statica del Corpo Rigido
15.2. Si consideri il problema di equilibrio per la trave rigida in figura, sapendo
che vie di corsa dei carrelli di vincolo sono parallele. Si riconosca che questo
problema appartiene alla stessa categoria di quello dell’esercizio precedente
per α = 1/2, cosı̀ come del secondo esempio di Sez. 9: mentre la determinazione
delle reazioni vincolari è possibile in un unico modo, ci sono ∞1 configurazioni
di equilibrio indifferente.
Figura 3.26.
15.3. Sia dato il campo di forze
f (x1 , x2 , x3 ) = ae1 + bx2 x33 e2 + cx22 x23 e3 ,
si determinino le condizioni sulle costanti a, b, c perchè esso possa essere
conservativo e si determini il suo potenziale.
Soluzione. L’unica delle tre condizioni (15.3) che non sia verificata per
qualunque valore delle costanti è:
∂x2 f3 = ∂x3 f2 ,
che implica
2cx2 x23 = 3bx2 x23
⇒
c=
3
b.
2
È interessante osservare che questa condizione sarebbe comunque emersa
al termine della costruzione del potenziale. Infatti, per costruirlo, si deve
integrare il sistema differenziale
∂x1 Φ = −a,
∂x Φ = −bx2 x33 ,
2
∂x3 Φ = −cx22 x23 .
Integrando la prima di queste equazioni, si ottiene:
Φ(x1 , x2 , x3 ) = −ax1 + φ(x2 , x3 );
quanto alla nuova funzione incognita φ, l’integrazione della seconda equazione
porge:
1
φ(x2 , x3 ) = − bx22 x33 + ψ(x3 ),
2
relazione che, combinata con la terza equazione, fornisce:
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
15 Metodo del potenziale. Equilibrio stabile, instabile, indifferente.
85
3
∂x3 Φ = − bx22 x23 + ψ ′ (x3 ) = −cx22 x23 ;
2
ma, visto che ψ ′ è una funzione della sola variabile indipendente x3 , l’ultima
equaglianza può sussistere soltanto se tra b e c intercorre la relazione trovata
all’inizio, ovvero, se ψ ′ (x3 ) ≡ 0. In conclusione, il potenziale cercato è:
1
Φ(x1 , x2 , x3 ) = −ax1 − bx22 x33 + cost.
2
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -