Capitolo
7
I corpi estesi
1. I movimenti di un corpo rigido
Che cosa si intende per corpo esteso?
Con il termine di corpo esteso ci si riferisce ad oggetti per i quali non è lecito
adoperare l’approssimazione di particella, cioè le cui dimensioni non sono
trascurabili rispetto all’entità degli spostamenti coinvolti. Il corpo esteso può essere
pensato come scomponibile in un grande numero di punti materiali, ed i movimenti
di cui esso è capace possono a loro volta essere interpretati come moti d’insieme dei
punti materiali che lo costituiscono.
Che cosa si intende per corpo rigido?
Si dice corpo rigido un oggetto ideale che mantiene la stessa forma e le stesse
dimensioni qualunque sia la sollecitazione cui lo si sottopone.
Si tratta di una idealizzazione: nessun corpo reale soddisfa perfettamente questi
requisiti, tuttavia molti oggetti possono essere considerati corpi rigidi: un tavolo, un
bicchiere, e molti altri non lo sono, come una catena, una stoffa, una persona e così
via.
Quali movimenti sono possibili per un corpo rigido?
Studieremo il moto di traslazione ed il moto di rotazione di un corpo rigido e la loro
composizione, tralasciando l’analisi di movimenti più complessi come quello polare.
Si dice che un corpo rigido compie un moto di traslazione se tutti i suoi punti si
muovono con lo stesso vettore velocità e lo stesso vettore accelerazione.
Si dice che un corpo rigido compie un moto di rotazione se tutti i suoi punti
descrivono delle circonferenze con centro sulla stessa retta, che è detta asse di
rotazione
1
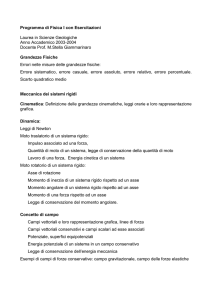
E’ importante sottolineare che un moto di traslazione non implica necessariamente
che i punti materiali che compongono il corpo rigido si muovano su delle traiettorie
rettilinee: essi potranno compiere anche dei tratti curvi, od al limite delle
circonferenze. L’importante è che non siano concentriche, come si vede in figura:
A
A
v
v
v
B
B
A
A
B
B
B
A
A
B
B
A
B
A
Il corpo a sinistra descrive un moto traslatorio: sebbene le traiettorie che i punti
materiali componenti il corpo rigido seguono siano circolari, le circonferenze lungo
cui si dispongono non hanno i centri su di un’unica retta. Una via alternativa per
accorgersi che si tratta di traslazione pura è verificare che comunque presi due punti
A e B sul corpo, la retta che passa per essi si mantiene parallela a sé stessa, e questo è
dovuto al fatto che le traiettorie di tutti i punti sono uguali. Il corpo a destra invece
descrive un moto di rotazione attorno ad un asse: tutti i punti che lo compongono si
spostano su delle circonferenze concentriche: la loro velocità cresce con la distanza
dall’asse di rotazione. Inoltre, come si vede, una retta passante per due suoi punti
qualunque A e B non si mantiene parallela a sé stessa.
2
2. Forze applicate ad un corpo rigido
Ci limiteremo a considerare un corpo rigido che si muova di moto piano,
per il quale tutti i vettori spostamento che individuano i punti che lo
costituiscono, si mantengono sempre paralleli ad uno stesso piano. Supponiamo
dunque che tale moto sia il risultato dell’applicazione di un sistema di forze:
F1 , F2 , .. FN anche esse parallele allo stesso piano. Nel caso
F1
F4
più generale il
corpo sarà animato dalla composizione di una rotazione ed una traslazione,
entrambe
parallele al piano. Allo scopo di prevederne le caratteristiche
seguiremo la strada di ricondurre il sistema di forze dato ad un altro più
semplice, che diremo equivalente, secondo la definizione seguente:
F3
F2
Due sistemi di forze si dicono equivalenti se i loro effetti sul moto di un corpo
rigido sono gli stessi
Per un qualunque sistema di forze è possibile definire il risultante :
R
F
F2
i
i
F1
ottenibile tramite una somma vettoriale.
Per determinare il moto di un corpo esteso è sufficiente conoscere R ?
Nel caso di un punto materiale questa grandezza esaurisce tutte le informazioni
che occorrono per definirne il moto. Per un punto, infatti, non è possibile
distinguere un moto di rotazione da un moto di traslazione: entrambi si
sviluppano lungo una traiettoria ad una sola dimensione ed è sufficiente
conoscere intensità, direzione e verso del risultante per ricavare le leggi orarie.
La libertà ulteriore di movimento di cui gode un corpo rigido, cioè la sua
possibilità di ruotare, comporta però la necessità di avere informazioni
aggiuntive per poter prevedere l’effetto delle forze ad esso applicate. E’
necessario associare a ciascuno dei vettori che individuano le forze F1 , F2 , .. FN
che costituiscono il sistema, un punto di applicazione. Gli effetti di una stessa
forza sul moto di un corpo rigido sono molto differenti se questa agisce in
posizioni diverse. Se infatti si sceglie un qualunque asse perpendicolare al
piano dove si svolge il moto, la capacità di una stessa forza di far ruotare il
corpo attorno ad esso cambia notevolmente variandone il punto di
applicazione.
Che grandezza fisica si può introdurre per misurare questa capacità?
E’ necessario introdurre una nuova grandezza fisica che quantifichi la capacità
di una forza di far ruotare un corpo esteso attorno ad un dato asse. Le
osservazioni mostrano che la capacità di far ruotare, a parità di intensità della
forza, è tanto maggiore quanto più la forza è intensa e quanto più viene
applicata lontano dall’asse attorno a cui si desidera produrre la rotazione. E’ per
questo motivo che la maniglia di una porta viene collocata all’estremo opposto
rispetto ai cardini girevoli. Per esprimere la capacità di far ruotare che ha una
3
R
F3
F4
forza bisogna dunque conoscere la distanza della retta lungo la quale la forza
stessa agisce, dall’asse attorno a cui si vuole far ruotare. Questa importante
informazione viene detta braccio della forza:
Braccio della forza: distanza della retta di azione delle forza dall’asse di
rotazione.
F1
Si introduce quindi la grandezza seguente:
b2
A
b1
b4
F4
b3
F3
F2
Fb
indicata con la lettera greca tau ( ) e detta momento della forza (o anche
momento torcente della forza). Considereremo positivi i momenti dovuti a
forze che producono rotazioni antiorarie attorno all’asse nel piano del foglio,
guardato dal lettore.
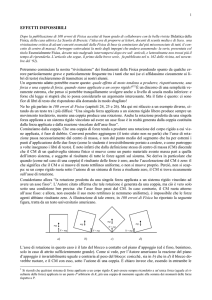
Se sul corpo che si muove di moto piano, agisce un sistema di forze,
chiameremo momento risultante del sistema rispetto a tale asse la grandezza
i | F1 | b1 | F2 | b2 | F3 | b3 ....
i
dove bi sono i bracci delle forze, vale a dire le distanze delle rette di azione di
ciascuna delle Fi dal punto in cui l’asse buca il piano. In figura il punto A
indica l’intersezione dell’asse scelto con il piano di
tratteggiate rappresentano i bracci delle forze.
bA
bB
FB
3
4
FA
rotazione, e le linee
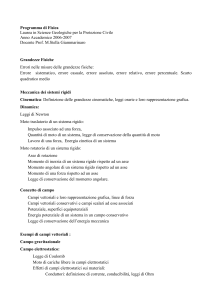
Esempio 1
Trovare il momento risultante del sistema di forze FA ed FB , di modulo 40 N e
30 N rispettivamente, che agiscono sul quadrato di lato 10 m in figura,
calcolato rispetto ad un asse perpendicolare al foglio e passante per il centro del
quadrato.
Dopo aver tracciato le rette di azione delle forze si riconosce che i bracci valgono:
bA
bB
4
2 3 6
e che per chi guarda il foglio, FA tende a far ruotare in verso orario attorno all’asse,
quindi il suo momento sarà negativo, FB antiorario quindi con momento positivo:
A B bA FA bB FB FA FB
4
6
10
10
40 30 50 N m
4
6
Il valore negativo del momento risultante comporta che il quadrato, oltre che a
traslare nella direzione di R , tenderà a ruotare in verso orario, per effetto del
sistema di forze applicatogli.
4
Come si trova il punto di applicazione di R
Tanto la retta di azione quanto il punto di applicazione della risultante del
sistema non sono determinabili attraverso la somma dei vettori effettuata con il
metodo di punta-coda o del parallelogramma. Tale tecnica, che consente di
sommare vettori, cioè classi di equivalenza di segmenti equipollenti, fornisce
soltanto l’intensità del risultante ed una direzione, quella della diagonale del
parallelogramma, alla quale il risultante è parallelo, ma non il punto di
applicazione1. Tuttavia il risultante del sistema di forze deve avere lo stesso
momento del sistema stesso, quindi se esiste un punto sull’oggetto rispetto al
quale la somma dei momenti è nulla, il risultante applicato in modo che abbia
momento zero rispetto quel punto sostituisce interamente il sistema di forze.
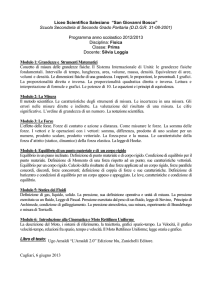
Esempio 2
Trovare, se esiste, il punto (od i punti) in cui si può applicare il risultante del
sistema di forze FA ed FB , di pari intensità, che agiscono sul quadrato in figura.
Dopo aver tracciato le rette di azione delle forze si riconosce che una forza ha sempre
momento nullo rispetto ad un qualunque asse che passa per la sua retta di azione.
Quindi entrambe le forze devono avere momento nullo rispetto ad un asse
perpendicolare al foglio nel punto P, intersezione delle due rette di azione. Ne segue
che anche il risultante dovrà avere momento nullo rispetto a P, quindi la sua retta
d’azione (inclinata di 45° rispetto al lato del quadrato visto che le forze hanno la
stessa intensità), dovrà passare per P. Quindi il risultante può essere applicato in uno
qualunque dei punti in cui la retta a 45° passante per P intercetta il quadrato.
FB
FA
R
FB
FA
P
FC
FD
Esempio 3
Trovare, se esiste, il punto di applicazione del sistema di forze parallele FC ed FD ,
FC
che agiscono sul quadrato in figura.
Le rette di azione delle due forze parallele non si incontrano mai, tuttavia è possibile
operare sommando al sistema due forze opposte che non alterano la dinamica
perché hanno risultante nullo (in verde nella figura). In questo modo si ottiene il
punto P rispetto al quale il sistema ha momento nullo, e così si fa passare per P la
retta di azione del risultante la cui direzione è ottenuta con la regola del
parallelogramma. Il risultante potrà poi essere applicato in uno qualunque dei punti
in cui la retta trovata intercetta il corpo, per esempio sul bordo del quadrato.
Per sommare vettori applicati occorre operare la costruzione del cosiddetto poligono
funicolare, il quale consente di conoscere la retta di azione del risultante, e, se reiterato su
di un sistema di forze ruotato rispetto all’originale, anche il punto di applicazione.
1
5
R
FD
P