1
Lezione 2
LEGGI DELLA DINAMICA
Estratto da B. Finzi, Meccanica Razionale, Zanichelli, Bologna
DINAMICA FISICA
La Dinamica si occupa del movimento dei corpi naturali in dipendenza delle circostanze
fisiche nelle quali il moto si compie. Queste circostanze fisiche possono essere tradotte da
forze, onde il nome di Dinamica.
1.RIFERIMENTO ASSOLUTO
Mentre in Cinematica i riferimenti spaziali e temporali potevano essere assunti con larga
arbitrarietà, i concetti e le leggi fondamentali della Dinamica classica perdono ogni
significato e ogni contenuto di verità sperimentale se non si assume un particolare
riferimento spaziale e temporale che diciamo assoluto.
Diciamo tempo assoluto quello dato da un orologio normale, proporzionale all’angolo di
rotazione della Terra rispetto alle cosiddette stelle fisse, tempo che riteniamo (secondo i
postulati della Cinematica classica) indipendente dall’osservatore.
Diciamo POSIZIONE ASSOLUTA la posizione di un punto o di un sistema riferita ad una
terna d’assi rigidamente collegata alle stelle fisse od uniformemente e rettilineamente
traslante rispetto ad esse.
Approssimativamente, nelle questioni più comuni, trascurando la rotazione diurna della
Terra attorno al proprio asse e il fatto che il moto annuo attorno al Sole non rettilineo
uniforme, tale si può ritenere una terna d’assi solidale con la Terra.
Un osservatore solidale con la terna alla quale si riferisce la posizione assoluta e che si
vale del tempo assoluto si dice osservatore assoluto:
è rispetto a questo osservatore che sono valide le leggi e le esperienze che servono di
fondamento alla Dinamica
Notiamo che questa riserva cade nella teoria della relatività, nella quale, ci si preoccupa di
determinare delle leggi fisiche vere per ogni riferimento spaziale e temporale.
2
PUNTO MATERIALE
In dinamica faremo sovente uso della nozione di punto materiale, al quale anzi riferiremo
le leggi fondamentali.
Consideriamo un corpo contenuto in una sfera di raggio ε. Se ε è tanto piccolo rispetto alle
dimensioni del campo di moto da poter essere trascurato, il corpo del quale non si
considera parte alcuna, può assimilarsi nel suo movimento ad un punto: un punto P
qualsivoglia interno alla sfera considerata. Il punto P che rappresenta cinematicamente il
punto, ed al quale si attribuiscono le proprietà fisiche globali del corpo stesso, si dice
punto materiale.
Ad esempio:
1) Un proiettile da fucile ha dimensioni trascurabili rispetto a quelle del campo
occupato dalla sua traiettoria: potremmo assimilare il proiettile ad un punto
materiale.
2) Un veicolo lungo una strada sufficientemente lunga può assimilarsi ad un punto
materiale.
3) Così pure la Terra nel suo movimento annuo può assimilarsi ad un punto materiale,
perché le sue dimensioni sono piccole rispetto a quelle della sua orbita attorno al
Sole (il rapporto fra il raggio terrestre distanza media fra la Terra e il Sole vale circa
1/25.000).
PRINCIPIO DI RELATIVITA’ GALILEIANA
Consideriamo due osservatori O e o, che si valgono dello stesso tempo assoluto, il
secondo dei quali in moto traslatorio rettilineo ed uniforme rispetto al primo:
per esempio O sia uno sperimentatore che si riferisce ad una terna solidale con l’edificio
ove si trova il suo laboratorio, o sia uno sperimentatore che si riferisce ad una terna
solidale con una cabina di una nave rettilineamente ed uniformemente traslante rispetto ad
O.
Le leggi sulla caduta dei gravi tratte dalle esperienze del primo osservatore coincidono con
quelle tratte dalle esperienze del secondo.
La stessa cosa avviene per le leggi sul moto del pendolo, sulla rotazione dei giroscopi,
sulla oscillazione dei bilancieri degli orologi, sulla vibrazione delle corde, sulla
propagazione del suono, sulla resistenza idro e aerodinamica, e così via.
Ne scende il principio di relatività galileiana, grazie al quale le leggi meccaniche,
desunte dalle esperienze di un osservatore o, moventesi di moto traslatorio rettilineo
uniforme rispetto ad un osservatore o, coincidono con le leggi meccaniche desunte dalle
esperienze di 0.
3
E' appunto grazie a questo principio che si può scegliere come riferimento assoluto,
rispetto al quale si formulano le leggi fondamentali della Dinamica, una qualunque
delle terne che si muovono di moto traslatorio rettilineo uniforme rispetto alle stelle
fisse.
Se diciamo x, y, z, t le coordinate cartesiane ortogonali ed il tempo dell'osservatore o;
X, Y, Z, T le coordinate cartesiane ortogonali ed il tempo dell'osservatore 0, il
legame fra x, y, z,t e X,Y,Z,T è il seguente:
t = T, x = X -VT, y = Y, z = Z
(1)
se l'origine dei tempi e le terne sono state scelte in modo tale che per t = T = O le due
terne coincidano, e la velocità costante V, con cui o trasla rispetto ad 0 sia orientata come
l’asse X.
Grazie al principio di relatività galileiana, le leggi meccaniche debbono avere
carattere invariantivo rispetto alla trasformazione (1), che e' detta appunto
TRASFORMAZIONE di GALILEO
4
LEGGE D'INERZIA
Consideriamo un punto materiale P isolato, cioè sottratto all'azione di ogni agente fisico.
Se esso è inizialmente in quiete rispetto ad un osservatore assoluto (praticamente anche
rispetto ad un osservatore solidale con la Terra), esso persiste nel suo stato di quiete.
Se, rispetto all'osservatore precedente, ha inizialmente una velocità v, il punto
possiede in ogni altro istante la stessa velocità v: il suo moto è cioè rettilineo
uniforme.
Dunque: rispetto ad un osservatore assoluto, un punto, sottratto ad ogni azione fisica, o
sta fermo o si muove di moto rettilineo uniforme.
La legge enunciata è la prima legge di NEWTON, la legge d'inerzia:
Essa non è direttamente verificabile con l' esperienza, perchè è impossibile
praticamente sottrarre un corpo all'azione di ogni altro.
Si può notare però che quanto più lieve è l'azione di altri corpi sul punto materiale che si
considera, tanto più sensibilmente questo persevera nel suo stato di quiete o di moto
rettilineo uniforme.
La legge d'inerzia è intimamente connessa al riferimento che abbiamo detto assoluto. Anzi
se essa è vera rispetto ad un osservatore 0 per un punto materiale P in posizione generica, è
pure vera rispetto ad un osservatore o soltanto se questo si muove di moto traslatorio
rettilineo uniforme rispetto ad 0.
Per le ragioni esposte il riferimento assoluto si dice RIFERIMENTO INERZIALE,
riferimento cioè per il quale vale la legge d'inerzia.
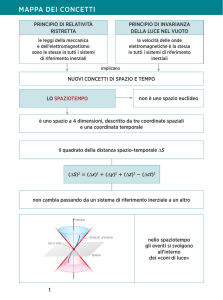
5
Terna O, (x, y, z) in moto traslatorio, rettilineo, uniforme, Terna inerziale.
Terna O, (x, y, z) in moto traslatorio, non rettilineo, Terna non inerziale.
Terna O, (x, y, z) in rotante, Terna non inerziale.
6
LEGGE FONDAMENTALE DELLA DINAMICA
Consideriamo un punto materiale P posto in presenza di altri corpi. Questi esercitino su
P delle azioni il cui complesso rappresenteremo, come già nella Statica, con un vettore
F applicato in P: con una forza.
Le tensioni di funi, le pressioni di aste, i pesi, la forza elastica esercitata da una molla, etc.
sono esempi di forze che per ora penseremo agire su P. Applicando una forza ad un
punto materiale P, sia in quiete che in moto rispetto ad un osservatore assoluto, esso
subisce una variazione di velocità, e quindi assume un'accelerazione a. Che legame
intercede fra F ed a?
Detto allora h un coefficiente di proporzionalità positivo, questa esperienza di
carattere locale è tradotta dalla relazione
a = h/p F
Ossia:
F = p/h a
(2)
Il coefficiente h non dipende, naturalmente, né da F, né da a, né da p, ma neppure dalla
natura del punto materiale, dall'istante t in cui l'esperienza si inizia, e neppure sensibilmente
alla porzione di P.
Se ora supponiamo che, rispetto all'osservatore o, il punto P abbia nell'istante t
prefissato una velocità v non nulla, l'ultima relazione scritta sussiste rispetto
all'osservatore o, anche se nell'istante t prefissato la velocità v di P non è nulla.
Del resto la (2) può verificarsi sperimentalmente in modo diretto (se pur con maggiori
difficoltà) anche per punti materiali in moto non incipiente. Determiniamo ora il
coefficiente h che compare nella (2).
7
A tal fine basta riferirsi ad un caso particolare. Si consideri un punto materiale
soggetto soltanto al proprio peso: su di esso agisce soltanto una forza costante diretta come
la verticale discendente.
GALILEO dimostrò sperimentalmente che l’accelerazione che subisce un punto
materiale per effetto del suo peso è la stessa per tutti i corpi, indipendente dal tempo, dalla
posizione del punto (in una regione non troppo estesa) e dalla sua velocità.
Detta g l'accelerazione di gravità, p il peso, la (2) diviene nel caso in esame:
p = p/h g
Da questa si trae:
h=g
(3)
cioè la costante h che ha tutti i caratteri del modulo dell'accelerazione di gravità, si
identifica con questo. Calcolata cosi h scriveremo la (2), valida localmente per ogni
forza, nel modo seguente:
F = p/g a
(4)
Le osservazioni astronomiche giustificano l'estensione della (4) dalla Terra al cielo, e
mostrano indirettamente che è con grande approssimazione lecito considerare il
rapporto p/g che funge da coefficiente, dipendente dalla sola natura del punto
materiale.
Indichiamo la massa di un punto materiale con m,
m = p/g
(5)
e notiamo che essa è distinta dal peso, pur essendo legata al modulo di questo dalla
semplice relazione di proporzionalità (5): il peso è una forza che può essere
equilibrata da un'altra forza; non così invece la massa.
8
In un galleggiante, ad esempio, il peso è equilibrato dalla spinta idrostatica, ma questa
non influisce affatto sulla massa del galleggiante.
La massa ha carattere additivo: riunendo due punti materiali P1 e P2 di pesi p1 e p2 e di
masse m1 e m2 si ottiene un unico punto materiale P di peso p = p1 + p2 e quindi di massa
m = m1 + m2 eguale cioè alla somma delle masse dei punti materiali P1 e P2 . Valendosi
della (5), la (4) diviene:
F=ma
(6)
E' questa la forma consueta che si dà a quella che, per eccellenza, si dice la LEGGE
FONDAMENTALE della DINAMICA: forza ed accelerazione di un punto materiale sono
proporzionali, e il coefficiente di proporzionalità è la massa.
Torniamo alla legge fondamentale della Dinamica (6), e consideriamo 2 punti P1 e P2 ,
di masse m1 e m2 soggetti alla stessa forza F.
Se a1 e a2 sono accelerazioni di P1 e P2 , risulta :
F = m 1 a1
F = m 2 a2
m 1/m2
=
a1/a2
dove, a parità di forza, le accelerazioni subite dai due punti materiali sono
inversamente proporzionali alle loro masse. La massa di un punto materiale
rappresenta dunque un coefficiente d'inerzia (di pigrizia, se si vuole) alla variazione di
velocità.
La (6) permette, nota la forza impressa F, di calcolare l'accelerazione a subita dal
punto materiale
a = F /m
Viceversa, nota l'accelerazione a nel movimento, determina la forza motrice del
movimento stesso, identificandola con il prodotto ma.
Sapendo che il movimento di un pianeta è centrale e che la sua accelerazione a è
sempre diretta verso il Sole ed è in modulo inversamente proporzionale al quadrato della
distanza pianeta e Sole, si conclude che il Sole esercita sul pianeta una forza motrice
eguale ad m a, diretta dal pianeta verso il Sole ed in modulo proporzionale alla massa m
del pianeta ed inversamente proporzionale al quadrato della distanza fra pianeta e Sole.
Con l'introduzione della forza motrice definita dalla (6) ci è possibile dare alla
9
nozione di forza significato ben più ampio di quello intuitivo finora considerato, e
sufficiente allo svolgimento della Statica.
Non solo, ma la (6) ci permette di pervenire ad una misura dinamica della forza,
attraverso alla conoscenza della massa e la misura cinematica dell'accelerazione.
Le forze motrici definite dalla (6) si compongono con legge vettoriale. In ciò consiste il
principio sperimentale del parallelogramma delle forze motrici applicate ad uno stesso
punto materiale.
LEGGE DELL'AZIONE E DELLA REAZIONE.
Consideriamo due punti materiali P e Q. Sia FPQ la forza che si esercita sul punto P per
azione di Q. Sia analogamente FQP la forza che si esercita su Q per azione di P. Anche in
condizioni di moto: le due forze FPQ e FQP sono sempre opposte ed hanno come comune
retta d'applicazione la retta PQ.
Detta azione una delle due forze precedenti, e reazione l'altra, la legge ora enunciata
costituisce la legge dell'azione e della reazione, la terza legge di Newton: ad ogni
azione corrisponde una reazione eguale e contraria. Così, ad esempio, se con la mano si
esercita una forza avente carattere di pressione sul tavolo, questo (sia che si muova, sia
che non si muova) esercita su di noi una forza avente carattere di pressione opposta
alla precedente.
A proposito dell'azione e della reazione alle quali si riferisce la terza legge della
Dinamica, si deve osservare che queste forze sono dovute essenzialmente alla
presenza di corpi: anzi caratteristica delle forze dovute alla presenza di corpi è
appunto quella di soddisfare alla terza legge della Dinamica.
Osserviamo ancora che azione e reazione non sono applicate allo stesso punto
materiale: se l'una è applicata in P, l'altra è applicata in Q. Non si può dunque
sostituire ad esse il loro risultante nullo.
10
CARATTERISTICHE DELLA FORZA MOTRICE.
Mentre nella Statica ci è stato sufficiente assimilare le forze agenti su di un corpo e
traducenti le azioni di altri a trazioni di funi, pressioni di aste, ecc., in Dinamica estendiamo
questa nozione definendo la forza che agisce su di un punto materiale p in movimento, e
dovuta alla presenza di altri corpi, come la forza motrice F espressa dal prodotto della
massa del punto p per l'accelerazione a di P: F = m a.
La forza F si dice data se si conosce la legge finita che dà F in funzione degli
argomenti
F = F(P, V, m, kl, k2,…)
(9)
Si noti che, poiché la massa e l'accelerazione restano invariate nel passaggio da un
osservatore assoluto ad un altro, passaggio tradotto dalla trasformazione galileiana (1),
11
la funzione (9) deve essere tale da possedere anch'essa il precedente carattere
invariantivo. Nella (9) m è costante, k 1, k 2, …, sono costanti o al più funzioni
conosciute del tempo.
RESISTENZA NEI FLUIDI
Una forza può dipendere soltanto dalla velocità v del punto P. E' questo il caso delle
resistenze esercitate da fluidi: la resistenza viscosa, proporzionale alla velocità, con verso
opposto a questa
F = - kv v ;
(10)
La resistenza idraulica, avente la direzione della velocità, verso opposto a questa,
modulo proporzionale al quadrato della velocità,
F = - ki v v ;
(11)
la resistenza balistica, avente la direzione della velocità, verso opposto a questa, modulo
crescente con v secondo una funzione f(v) che cresce più rapidamente di v2,
F = - kb f(v) v;
(12)
Nelle formule (10), (11), (12) i coefficienti kv, ki, kb sono positivi e dipendono dalle
caratteristiche del fluido che esercita la resistenza e dalle caratteristiche di forma e di
dimensione del corpo.