compito 27/12/99
page 1a
Meccanica Applicata alle Macchine
Compito 27/12/99
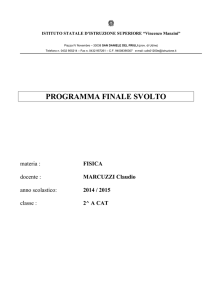
1. Il dispositivo mostrato in figura serve per il sollevamento di veicoli. Il corpo indicato con 1 si
appoggia al terreno (considerarlo solidale con il terreno) mentre il corpo 2 solleva il veicolo
scorrendo su una guida verticale. Il movimento del meccanismo è impresso dalla corsa q del
pistone 4 (la quale è determinata da una vite che agisce fra il pistone e la madrevite ricavata in A).
La guida del pistone 4 ha attrito di strisciamento (indicare con f il relativo coefficiente di attrito).
Assumendo le dimensioni e la numerazione dei corpi indicata in figura determinare:
a) il rapporto di velocità fra la corsa q della vite (come indicata in disegno) e l'altezza y del piano
di appoggio.
b) la forza esercitata dalla vite per l'innalzamento del veicolo (carico P) nell'ipotesi che tutti i corpi
abbiano inerzia trascurabile (per via del movimento molto lento) e trascurando il peso proprio.
c) il valore del coefficiente di attrito f che garantisce moto irreversibile (in particolare con
riferimento alla configurazione completamente abbassata) spiegando che cosa succede se l'attrito
è minore.
2. Spiegare come è possibile, con misure di vibrazioni, verificare l'integrità strutturale dei vincoli
delle strutture.
Soluzione dell'esercizio.
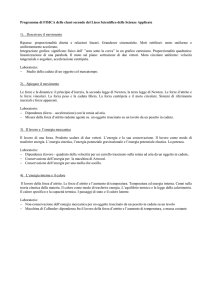
Il meccanismo è composto di una sola catena cinematica chiusa. Per individuarla
correttamente conviene rappresentare il meccanismo in una configurazione generica, come
quella presentata di seguito (le due configurazioni mostrate nella figura in alto sono casi
particolari e potrebbero indurre in errore).
compito 27/12/99
page 2a
Il poligono di chiusura è individuato dai punti OBCD come segue:
OB + BC + CD − OD = 0
che diventa, con ovvio significato dei simboli:
a1
cos θ 3
+l
b1
sin θ 3
+ a 2− a 4− q
−1 − 0
yD
0
= 0
0
l cos θ 3 + q + a 4 − a 2 + a 1 = 0
l sin θ 3 − yD + b 1 = 0
da notare che il modulo del vettore CD non è q, ma può essere espresso nin funzione di q infatti, in
base alle dimensioni del corpo 2, si ha:
CD = a 2 − a 4 + q
Il poligono di chiusura precedente permette di determinare il vettore OD:
OD =
0
yD
e in particolare yD, da cui si ricava OE e quindi y:
y = yD + b 2
Per trovare i rapporti di velocità basta derivare l'equazione precedente e le equazioni di chiusura:
∂ y = ∂ yD + b
2
∂t
∂t
∂ y = ∂ yD
∂t
∂t
∂ l cos θ + q + a − a + a = 0
3
4
2
1
∂t
∂ l sin θ − yD + b = 0
3
1
∂t
compito 27/12/99
page 3a
dalle equazioni di chiusura (le ultimpe due) si ha:
∂ θ =
∂ q
1
∂ t 3 l sin θ 3 ∂ t
∂ yD = cot θ ∂ q
3 ∂t
∂t
Sostituendo nella prima (domanda a):
∂ y = cot θ ∂ q
3 ∂t
∂t
Per rispondere alla domanda b è sufficiente scrivere le equazioni di Newton - Eulero (non si può
usare il principio dei lavori virtuali perché la forza di attrito non sarebbe conosciuta).
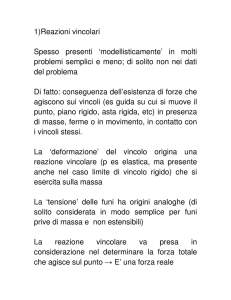
Si incomincia con il corpo 2 (vedi figura sotto). Le forze che agiscono sul corpo 2 sono la reazione
vincolare della guida verticale (M10 e R9), la reazione vincolare della guida del pistone (M8, R7) la
forza di attrito R6, il carico applicato P e la forza F esercitata dalla vite sulla madrevite in A. Il
peso proprio è trascurabile.
Da notare che per le forze F e P si è assunto nel disegno il verso che le forze stesse
presumibilmente hanno nella realtà, mentre nel caso delle reazioni vincolari e della forza di attrito
si è assunto un verso generico, concorde con gli assi del sistema di riferimento (ovviamnete il
segno delle rispettive variabili determinerà il verso reale delle forze).
L'equilibrio alla traslazione verticale, considerato che l'accelerazione è trascurabile, fornisce la
reazione normale nella coppia prismatica con il pistone 4:
0 = − P + R7
R7 = P
Le equazioni per la traslazione x e la rotazione non hanno interesse.
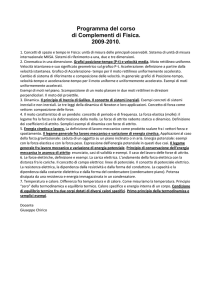
Passando ora a considerare il corpo 4 si hanno le forze indicate in figura sotto:
compito 27/12/99
page 4a
Anche in questo caso la reazione vincolare (R2, M4) e la forza di attrito R3 sono state indicate con
direzioni generiche concordi con i versi positivi del sistema di riferimento. In particolare il verso
della forza di attrito R3 è quello di figura nel caso di moto diretto (quando q cresce) mentre è
opposto nel caso di moto retrogrado (infatti la forza di attrito si oppone sempre al moto).
Ovviamente per il principio di azione e reazione si avrà:
R2 = − R7
R3 = − R6
M4 = − M8
Al contrario la forza F esercitata dalla vite è assunta secondo il verso presunto (che è opposto a
quello assunto per il corpo 2, tenedo in questo modo conto del principio di azione e reazione).
Infine, per la reazione vincolare della coppia rotoidale si è assunta una forza nella direzione dell'
asta 3 (invece che due forze secondo le direzioni x e y), sfruttando il fatto che il corpo 3 è privo di
massa, e trasmette quindi soltanto una coppia di forze fra i punti B e C (a questo risultato si
perviene del resto scrivendo le equazioni di Newton - Eulero per il corpo 3).
Le equazioni di Newton forniscono:
0 = − F + R 1 cos θ 3 + R 3
0 = R 2 + R 1 sin θ 3
In queste R2 è nota (si ottiene da R7 per il principio di azione e reazione):
R2 = − P
mentre la forza di attrito R3 può essere espressa in funzione del modulo di R2 e del coefficiente di
attrito f.
Nel caso di moto diretto si ha:
R3 = f R2
Al contrario nel caso di moto retrogrado si deve usare:
R3 = − f R2
Nel caso di sollevamento del veicolo (domanda b) si deve considerare il moto diretto (q cresce) e
quindi le equazioni di Newton diventano:
0 = R 1 cos θ 3 − F + R 2 f
0 = R 2 + R 1 sin θ 3
compito 27/12/99
page 5a
in cui, sostituendo
R2 = − P
si ottiene la relazione fra la forza F e la forza P cercata (ricordare che P > 0):
R1 =
P
sin θ 3
F = P cot θ 3 + f
infine, per quanto riguarda la irreversibilità del moto (domanda c) si deve verificare se, in assenza
di forza esercitata dalla vite (F = 0) si può avere equilibrio. Ovviamente in assenza di forza F la
forza di attrito deve essere considerata come nel caso di moto retrogrado, che è del resto il moto
che si sviluppa se l'attrito è insufficiente. Sostituendo:
R3 = − f R2
F =0
si ottiene:
0 = − P + R 1 sin θ 3
0 = − 0 + R 1 cos θ 3 − f R 2
che da il valore minimo del coefficiente di attrito che garantisce l'equilibrio:
R1 =
P
sin θ 3
f = cot θ 3