1.2 1
0.0.
Esempi di modelli fisici
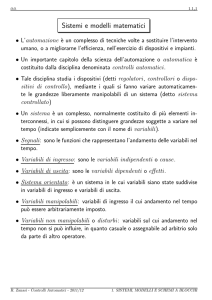
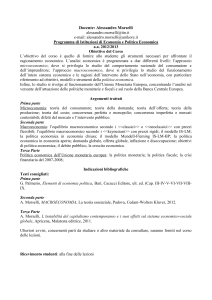
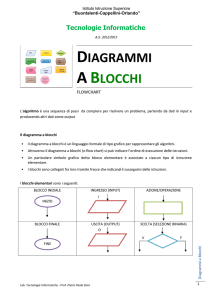
1) Dinamica del rotore di un motore elettrico.
Si consideri un elemento meccanico con inerzia J, coefficiente di attrito
lineare b che ruota alla velocità angolare ω al quale venga applicata una
coppia esterna c(t).
c(t)
ω(t)
c(t)
ω(t)
?
0
t
J
?
0
b
t
L’equazione differenziale che caratterizza il sistema è quella che si ricava
dalla legge di conservazione della quantità di moto angolare:
d[Jω(t)]
= c(t) − b ω(t)
↔
J ω̇(t) + b ω(t) = c(t)
dt
Partendo da condizioni iniziali nulle e applicando Laplace si ottiene:
J s ω(s) + b ω(s) = C(s)
ω(s) =
↔
1
C(s)
b+Js
per cui il sistema fisico può essere descritto nel modo seguente:
G(s)
C(s)
c(t)
-
1
b+Js
ω(s)
-
ω(t)
dove G(s) è la funzione di trasferimento che descrive il sistema fisico:
G(s) =
R. Zanasi, R. Morselli - Controlli Automatici - 2005/06
1
b+Js
1. CONCETTI FONDAMENTALI
1.2 2
1.2. MODELLI FISICI E SCHEMI A BLOCCHI
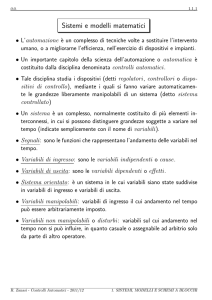
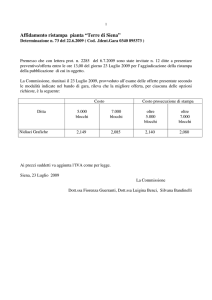
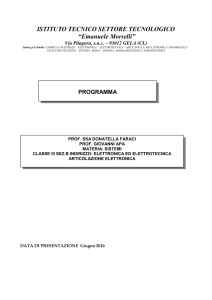
2) Sistema massa-molla-smorzatore.
K
F
m
b
x
• Variabili e parametri del sistema fisico:
x(t)
ẋ(t)
ẍ(t)
F (t)
:
:
:
:
posizione
velocità
accelerazione
forza applicata
m
K
b
P (t)
:
:
:
:
massa
rigidità della molla
Coefficiente di attrito lineare
Quantità di moto
• Legge di conservazione della quantità di moto P (t) = m ẋ(t):
X
X
d
d
[P (t)] =
Fi(t)
→
m [ẋ(t)] =
Fi (t)
dt
dt
i
i
• Si ottiene quindi la seguente equazione differenziale:
d
[m ẋ(t)] = F − b ẋ(t) − K x(t)
dt
che può essere riscritta nel seguente modo:
mẍ(t) + b ẋ(t) + K x(t) = F (t)
• Utilizzando le trasformate di Laplace (x(0) = ẋ(0) = 0) si ha:
m s2X(s)+b s X(s)+K X(s) = F (s)
↔
X(s) =
F (s)
m s2 + b s + K
Il sistema può quindi essere rappresentato nel modo seguente:
G(s)
F (s)
-
1
m s2 + b s + K
R. Zanasi, R. Morselli - Controlli Automatici - 2005/06
X(s)
-
1. CONCETTI FONDAMENTALI
1.2 3
1.2. MODELLI FISICI E SCHEMI A BLOCCHI
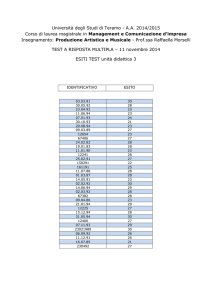
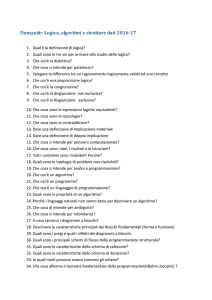
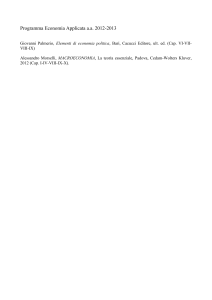
3) Sistema elettrico RLC.
R
IL
Iu=0
L
Vi
Vu
• Legge fisica: la variazione del flusso concatenato φc(t) è uguale alla tensione VL(t) applicata ai capi dell’induttanza.
d
[φ(t)] = VL (t)
dt
L
→
d
[IL(t)] = Vi(t) − R IL (t)
dt
• Applicando la trasformata di Laplace, con condizioni iniziali nulle, si ha:
L s IL(s) + R IL(s) = Vi(s)
↔
IL(s) =
1
Vi (s)
L
s
+
R
| {z }
G(s)
• Il sistema può quindi essere rappresentato nel modo seguente:
G(s)
Vi(s)
-
1
Ls + R
R. Zanasi, R. Morselli - Controlli Automatici - 2005/06
IL (s)
-
1. CONCETTI FONDAMENTALI
1.2 4
1.2. MODELLI FISICI E SCHEMI A BLOCCHI
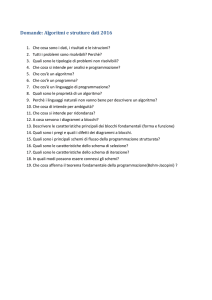
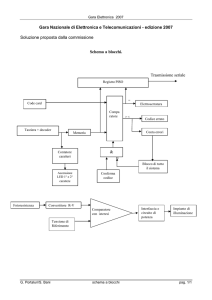
4) Motore elettrico in corrente continua.
Ia
6
L
V
ωm
6
R
+
E
b
J
−
Cm
θm
Ce
• Schema a blocchi POG del motore:
-
V
E
Ke
ωm
-
6
?
1
R + Ls
1
b + Js
6
Ia
?
--
Ke
-
-
Cm
Ce
Il sistema è descritto dalle seguenti 2 equazioni differenziali:
(
LI˙a = −RIa − Ke ωm + V
J ω̇m = KeIa − b ωm − Ce
• Per il principio di conservazione dell’energia, la costante Ke è sia la costante di proporzionalità che lega la corrente di armatura Ia alla coppia motrice
Cm, sia la costante di proporzionalità che lega la forza contromotrice E
alla velocità angolare ωm :
Cm = K e I a
R. Zanasi, R. Morselli - Controlli Automatici - 2005/06
E = K e ωm
1. CONCETTI FONDAMENTALI
1.2 5
1.2. MODELLI FISICI E SCHEMI A BLOCCHI
• Riducendo “in forma minima” il sistema (vedi “Formula di Mason”) si
ottiene il seguente legame tra la variabile di uscita ωm (t) e le variabili di
ingresso V (t) e Ce(t):
ωm(s) = G1(s)V (s) + G2(s)Ce(s)
dove G1(s) lega l’ingresso di controllo V (t) all’uscita ωm (t)
G1(s) =
Ke
(R + L s)(b + J s) + Ke2
mentre G2(s) lega l’ingresso di disturbo Ce(t) all’uscita ωm (t):
G2(s) =
−(R + L s)
(R + L s)(b + J s) + Ke2
• La precedente relazione può essere riscritta come
2
2
L J s + (R J + L b)s + R b + Ke ωm (s) = KeV (s) − (R + L s)Ce(s)
che corrisponde alla seguente equazione differenziale del secondo ordine:
L J ω̈m + (R J + L b)ω̇m + (R b + Ke2)ωm = KeV − R Ce − L Ċe
R. Zanasi, R. Morselli - Controlli Automatici - 2005/06
1. CONCETTI FONDAMENTALI
1.2 6
1.2. MODELLI FISICI E SCHEMI A BLOCCHI
5) Frizione idraulica.
Si consideri il seguente modello idraulico semplificato di una frizione:
x
Km
mp Q x
Pressione di alimentazione
Portata volumetrica nella valvola
Costante di prop. della valvola
Capacità idraulica del cilindro
Pressione all’interno del cilindro
Sezione del pistone
Posizione del pistone
Velocità del pistone
Massa del pistone
Attrito lineare del pistone
Rigidità della molla
Forza della molla sul pistone
P
Q
Kv
Cm
P1
A
x
ẋ
mp
b
Km
Fm
b, A
Cm
P1
Q
Valvola
(Kv )
P
R=0
• Uno schema a blocchi che descrive la dinamica del sistema è il seguente:
-
P
P1
6
--
A
-
Fx
?
-
?
Kv
Cm s
6
x
6
1
s
6
Q
?
-
-
Qx
A
?
-
Km
1
b+mps
1
Fm
-
-
6
ẋ
0
• Riducendo il sistema in forma minima si ottiene la seguente f.d.t. G(s):
G(s) =
Fm (s)
AKm Kv
=
P (s)
Cm mp s3 + (Cm b + Kv mp )s2 + (A2 + Cm Km + Kv b)s + Km Kv
a cui corrisponde la seguente equazione differenziale del terzo ordine:
...
Cmmp F m +(Cm b+Kv mp )F̈m +(A2 +Cm Km +Kv b)Ḟm +Km Kv Fm = AKm Kv P (t)
R. Zanasi, R. Morselli - Controlli Automatici - 2005/06
1. CONCETTI FONDAMENTALI
1.2 7
1.2. MODELLI FISICI E SCHEMI A BLOCCHI
6) Sistema meccanico di trasmissione.
Si consideri il sistema meccanico mostrato in figura, costituito da un albero di inerzia J, che ruota a velocità
ω, a cui è applicata la coppia esterna
τ . Tramite un rullo elastico avente rigidità torsionale K1 e raggio costante R, l’albero spinge una massa M
che comprime una molla lineare con x
coefficiente di rigidità K2.
b1
K1
J
R
w t
M
b2
K2
Un possibile schema a blocchi che descrive la dinamica del sistema è il
seguente:
-
τ
τ1
6
--
1 R
?
-
F2
6
1
b2 + M s
K1
s
K2
s
6
F2
?
1
b1 + J s
ω
-
?
-
ω
-
6
1 R
?
-
-
ẋ
0
La funzione di trasferimento G(s) che lega l’ingresso τ all’uscita F2 si
calcola facilmente utilizzando la formula di Mason :
K1 K2 R
G(s) =
a 4 s4 + a 3 s3 + a 2 s2 + a 1 s + a 0
dove:
a4
a3
a2
a1
a0
=
=
=
=
=
J M R2
(b2J + b1M )R2
J K 1 + b 1 b2 R 2 + J K 2 R 2 + K 1 M R 2
b 1 K1 + b 2 K1 R 2 + b 1 K2 R 2
K 1 K2 R 2
R. Zanasi, R. Morselli - Controlli Automatici - 2005/06
1. CONCETTI FONDAMENTALI