Politecnico di Torino
Corso di Laurea a Distanza in Ingegneria Elettrica
Elettronica Industriale di Potenza II
Docente: prof. Antonino Fratta
Prima stesura (A.A. 1999/2000) a cura di ing. GianMario Pellegrino
Seconda stesura (A.A. 2004/2005) a cura di dr. Giuseppe Griffero
Elettronica Industriale di Potenza II
Politecnico di Torino – Corso di Laurea a distanza in Ingegneria Elettrica
Generalità sulla conversione di energia.
Un convertitore, all’interno di un processo, ha la funzione di modificare in modo controllato
alcune delle caratteristiche dell’energia elettrica fornita dal generatore (ad es. il tipo di regime, la
frequenza, l’ampiezza, le impedenze caratteristiche).
Gli obiettivi da perseguire nella realizzazione di un convertitore sono:
• Risparmio di energia
• Affidabilità nel tempo
• Ridotte interferenze elettromagnetiche (EMI)
• Ridotti volumi, masse e costi
Un trasformatore non si può considerare un convertitore, in quanto le grandezze elettriche di
uscita dipendono in una proporzione prestabilita da quelle in ingresso (e non sono regolate in
modo continuo).
Neppure un amplificatore lineare si può considerare un convertitore, perché il suo funzionamento
è dissipativo (la potenza dissipata è dell’ordine di grandezza di quella fornita al carico).
Definizioni:
Convertitore: amplificatore “non dissipativo” che può variare con continuità una o più grandezze
elettriche prodotte nella forma richiesta, dimensionato per assorbire energia elettrica in modo
efficiente ed immune, nonché compatibile con l’ambiente elettromagnetico circostante.
Convertitore Statico: un convertitore è statico quando nessun moto meccanico contribuisce al
processo di conversione (si utilizzano dispositivi elettronici a semiconduttore).
Erogazione di potenza ad un carico resistivo:
comparazione tra regolazione reostatica ed a commutazione.
Sistema Fisico (ipotetico): riscaldamento dell’abitacolo di un'automobile elettrica.
Si vuole regolare l’alimentazione di una “stufetta” elettrica, per una potenza compresa tra 200W
e 50 W. La batteria di alimentazione è specificata per una tensione interna (a vuoto) Eb di valore
variabile tra 10 V e 16 V ed una resistenza interna (costante) Rb = 30 mΩ.
Le condizioni nominali di funzionamento corrispondono a Ebnom = 12 V, Pnom = 200 W.
Il resistore di carico presenta un comportamento dinamico induttivo, modellizzato da una
induttanza-serie che rende necessari particolari accorgimenti nel caso di regolatore a
commutazione. Per semplicità, nello svolgimento della prova, si assume l’adozione di un
resistore idealmente anti-induttivo, mentre in casi reali si possono immaginare valori compresi
tra 100nH (resistore anti-induttivo) e 10 µH (resistore a filo avvolto a basso costo).
Finalità: dimensionamento di carico e attuatore in modo da garantire, col massimo rendimento
possibile, l’erogazione della potenza nel campo specificato, in tutte le condizioni della batteria di
alimentazione.
2/25
Elettronica Industriale di Potenza II
Politecnico di Torino – Corso di Laurea a distanza in Ingegneria Elettrica
Caso A: Regolatore reostatico.
L’elemento di regolazione è un resistore variabile, caratterizzato da una resistenza totale (Rtot) e
dal grado di sfruttamento x (0 ÷ 1). Si suppone (trascurando le resistenze di contatto) che la
resistenza del reostato possa effettivamente essere nulla per x = 0 (condizioni di massima
erogazione).
x
tot
vR
Fig. 1 Regolatore reostatico.
Resistore di carico:
dimensionare la Ru in modo da garantire l’erogazione della Pnom in tutto il campo di valori di Eb;
(200W @ Eb=10V ; x=0)
Reostato di regolazione:
dimensionare Rtot in modo da poter erogare la minima potenza (50 W) al carico in tutto il campo
di valori di Eb;
(50W @ Eb=16V ; x=1)
Rendimento:
calcolare il rendimento complessivo della conversione in tutti i casi esaminati.
Pu
η =
Pu + PRb + PRe g
Caso B: Regolatore a commutazione.
L’elemento di regolazione è un transistor di potenza, di caratteristiche statiche di conduzione ed
interdizione ideali. La tensione di batteria Vb viene modulata col regolatore statico
commutandone i due stati estremi di conduzione (ON) e interdizione (OFF) con una suddivisione
temporale caratterizzata essenzialmente dal duty-cycle di regolazione (D), ovvero dalla durata
dello stato di ON rispetto ad un ciclo completo di modulazione (periodo di modulazione T).
Transistor di potenza
vR
Fig. 2 Regolatore a commutazione realizzato con un transistor di potenza.
Le regolazione è di tipo non dissipativo (se l’interruttore è ideale la potenza dissipata è nulla),
ovvero a rendimento molto più alto rispetto alla regolazione reostatica.
Per contro, la presenza della induttanza-serie del resistore di carico provocherebbe, in uno
schema di conversione come quello di Fig. 2, delle sovratensioni potenzialmente dannose in fase
di apertura dell’interruttore (interruzione della corrente erogata al carico), per cui le strutture
reali di conversione a commutazione sono in realtà più complesse e necessitano, nel caso della
commutazione forzata (ovvero commutazioni di ON e OFF gestibili in ogni istante
indipendentemente dallo stato del circuito) della presenza di diodi di ricircolo associati a ciascun
3/25
Elettronica Industriale di Potenza II
Politecnico di Torino – Corso di Laurea a distanza in Ingegneria Elettrica
interruttore attivo, oltre che di peculiari accorgimenti nell’accoppiamento delle caratteristiche
reattive di generatore e carico.
Funzione di comando di interruttori
Il processo di comando è analogo sia per interruttori elettromeccanici che per interruttori statici.
L’unica differenza è la velocità di esecuzione dell’ordine (decisamente bassa nel primo caso).
Il comando logico dello stato desiderato si può associare ad una funzione rettangolare unitaria
r(t) a due livelli “0” e “1”. Il livello “1” si può associare allo stato di ON , mantenuto per il
tempo tON. Il livello “0” si associa invece allo stato di OFF, mantenuto per il tempo tOFF.
La somma di tON e tOFF definisce il periodo di modulazione T:
T = tON + tOFF
tON
1
0
tOFF
T
Fig. 3 Comandi logici e sequenza temporale degli stati
E’ utile definire il valore medio D della rettangola di comando r(t) in ciascun periodo di
modulazione T.
D=
1
T
T
∫ r( t )dt
0
D esprime il “duty cycle” e rappresenta l’utilizzazione media dell’interruttore in un intervallo di
tempo corrispondente al periodo di commutazione.
Come si vedrà in seguito, le caratteristiche di conversione sono funzione di D.
4/25
Elettronica Industriale di Potenza II
Politecnico di Torino – Corso di Laurea a distanza in Ingegneria Elettrica
Caratteristiche statiche degli interruttori in uso nella conversione statica.
Commutazione in circuiti reattivi.
Tipologie fondamentali di interruttori.
La conversione statica dell’energia elettrica a commutazione forzata si basa sull’uso combinato
di interruttori di potenza di due tipologie fondamentali: il transistor ed il diodo.
Il transistor di potenza funge da interruttore attivo, ovvero comandabile in apertura e chiusura
tramite un circuito di pilotaggio.
Il diodo di ricircolo è necessario (per motivi che verranno chiariti in seguito) ad evitare
singolarità (sovratensioni) sull’interruttore attivo durante la commutazione di apertura.
Caratteristiche statiche.
• La caratteristica statica del diodo è nota e consta di:
un tratto di conduzione (vAK≅0 ∀ iAK) nel primo quadrante del piano iAK - vAK ; un tratto di
interdizione (iAK=0 ∀ vAK) nel terzo quadrante.
Lo stato del diodo dipende solo dal segno delle grandezze elettriche imposte dal circuito
esterno.
Il più semplice modello del diodo in conduzione consiste in una caduta fissa (soglia) in serie
ad una resistenza.
La caratteristica di interdizione può essere considerata ideale (per tensioni inferiori a quella di
breakdown).
• Il transistor è un componente a tre morsetti il cui stato è dominabile attraverso una grandezza
di pilotaggio (tensione o corrente, a seconda del tipo di transistor): le caratteristiche di
conduzione e di interdizione ai morsetti “di potenza” rappresentano gli estremi dell’area dei
possibili punti di lavoro nel corrispondente piano corrente-tensione (tale area è detta zona
attiva), ottenibili con opportuni valori del pilotaggio.
Il modello del transistor in conduzione è, a seconda del tipo di componente, analogo a quello
del diodo (soglia + resistenza) oppure semplicemente resistivo (resistenza equivalente).
Tipologie di transistor di potenza:
pilotaggio
BJT
Corrente (dissipativo)
(Darlington)
MOSFET:
Tensione (non diss.)
IGBT:
Tensione (non diss.)
quadranti
compatibili
unidir.
non rev.
bidir.
non rev.
unidir.
non rev.
modello
conduzione
campo
applicativo
resistenza
passato
resistenza
VC<500V
soglia + resistenza
VC≥500V
I componenti citati, ottenuti con distinte tecnologie di trattamento del silicio, consentono
prestazioni diverse dal punto di vista di potenza e frequenza di modulazione. In generale
componenti di piccola potenza consentono di lavorare a frequenze maggiori di componenti della
stessa famiglia destinati a potenze più grandi.
5/25
Elettronica Industriale di Potenza II
Politecnico di Torino – Corso di Laurea a distanza in Ingegneria Elettrica
Commutazione in circuiti reattivi:
accoppiamento compatibile di generatore, convertitore e carico.
I convertitori a commutazione impongono necessariamente, negli istanti di commutazione degli
interruttori, elevate derivate di corrente e/o tensione alla maglia di rete in commutazione, in
modo da effettuare i passaggi da una configurazione all’altra della rete (switch ON - switch OFF,
e viceversa) nel modo più ideale (ovvero più veloce) possibile.
L’entità delle derivate di corrente e tensione (ordini di grandezza usuali nella conversione statica
a commutazione forzata: centinaia di A/µs; migliaia di V/µs), unita alla natura reattiva (anche
solo parassitica) di tutte le reti elettriche reali, impone dei precisi vincoli strutturali a questo tipo
di convertitori, ovvero alla natura reattiva delle due parti di rete (generatore - carico) che il
convertitore deve interfacciare.
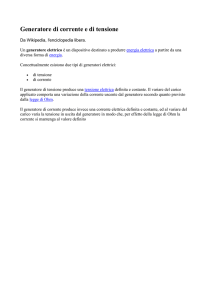
Esempi di accoppiamento incompatibile.
Avendo a disposizione un generatore ideale di tensione, il pilotaggio tramite un interruttore
dinamicamente ideale (ovvero in grado di commutare istantaneamente il proprio stato) di un
carico puramente resistivo produce traiettorie di commutazione (nel piano v-i) dell’interruttore
coincidenti con la retta di carico dell’insieme generatore più resistenza di carico.
i
i
v
vR
E
R
v
Fig. 4 Traiettorie delle transizioni resistive sul piano dell’interrutore
La presenza di fenomeni reattivi serie (di natura induttiva) o parallelo (di natura capacitiva) non
cambia (a parità di generatore e resistenza di carico) i punti di funzionamento di ON e di OFF a
regime, ma cambia completamente (ed in modo diverso nei due casi) le traiettorie di
commutazione.
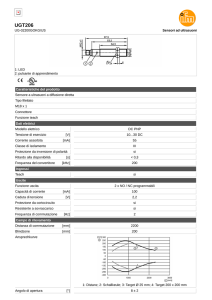
In particolare, se la dinamica di commutazione è idealmente infinita (annullamento istantaneo
della corrente nell’interruttore in apertura, passaggio istantaneo dalla caratteristica di interdizione
a quella di conduzione in chiusura) per entrambi i tipi di carico una delle due commutazioni
(quella di OFF per il carico induttivo, quella di ON per il carico capacitivo) è sicuramente
distruttiva nei confronti dell’interruttore (sovratensione di apertura vSW=IcommROFF e
sovracorrente di chiusura iSW=Vcomm/RON).
Turn OFF:
Sovratensione
incontrollata sullo
SW
i
i
v
E
vL
vR
R
Turn ON:
OK
v
Fig. 5 Traiettorie di commutazione di un circuito ohmico- induttivo serie
6/25
Elettronica Industriale di Potenza II
Politecnico di Torino – Corso di Laurea a distanza in Ingegneria Elettrica
i
Turn ON:
Sovracorrente
incontrollata
i
v
E
iC
iR
R
C
Turn OFF:
OK
v
Fig. 6 Traiettorie di commutazione di un circuito ohmico- capacitivo parallelo, in serie
ad un generatore di tensione
Questo esempio (con generatore a tensione impressa, ovvero idealmente capacitivo) può essere
riproposto dualmente con un generatore di natura induttiva (generatore di corrente), con
interruttore in parallelo anziché in serie al carico. La sintesi della analisi dei quattro
accoppiamenti possibili porta ad affermare che:
• è impossibile realizzare commutazioni forzate con un semplice interruttore (una delle due
commutazioni è sempre incompatibile);
• è possibile, viceversa, realizzare commutazioni forzate quando le nature reattive di generatore
e carico sono opposte. Allo scopo è necessario utilizzare non uno solo, ma due interruttori
opportunamente disposti e comandati (ad es per garantire la continuità di corrente nel caso di
carico induttivo): si utilizza cioè un deviatore (interruttore più diodo di ricircolo);
• nei rimanenti casi (generatore e carico di uguale natura reattiva) la commutazione risulta
incompatibile a meno di aggiungere elementi reattivi esterni.
Introduzione del concetto di cella canonica per la commutazione forzata.
Queste conclusioni sono alla base della definizione della cosiddetta cella canonica di
commutazione forzata, ovvero dell’insieme di deviatore ideale ed elementi reattivi per la
compatibilità che riassume tutte le considerazioni precedenti, e che costituisce il mattone
fondamentale, unidirezionale e non reversibile, di tutte le strutture di conversione a
commutazione forzata (ottenibili per composizione di celle canoniche).
7/25
Elettronica Industriale di Potenza II
Politecnico di Torino – Corso di Laurea a distanza in Ingegneria Elettrica
Cella canonica di commutazione forzata:
coefficienti di costo e di utilizzazione del prodotto di commutazione.
Cella canonica per la commutazione forzata.
La definizione della cella canonica sintetizza i concetti fondamentali di disposizione circuitale di
interruttori (servono almeno due interruttori per realizzare un deviatore), generatore e carico
compatibile con la commutazione forzata delle grandezze elettriche. La fig. 1 sintetizza
l’accoppiamento compatibile con i simboli di una capacità e una induttanza collegate al
deviatore. In altre parole: il deviatore insiste necessariamente su un ramo induttivo, mentre la
tensione ai capi dei due estremi di deviazione deve essere “mantenuta” da una disposizione che
presenti comportamento capacitivo. L’effettiva presenza di reattori discreti innestati sugli
interruttori di deviazione è poi funzione delle caratteristiche dei due sistemi di potenza
(generatore e carico) da interfacciare.
vC > 0
iL > 0
Fig. 7 Cella canonica unidirezionale, non reversibile di commutazione forzata con deviatore ideale.
iSW
+
vP
iP
vSW
iL
+
vC
+
iN
vN
+
vC
iL
iFW
vFW
Fig. 8 Implementazione statica della cella canonica unidirezionale, non reversibile.
La realizzazione della cella canonica unidirezionale, non reversibile a semiconduttore comporta
l’utilizzo di interruttori diversi, che, essendo fissa la polarità del circuito, devono poter condurre
correnti di segno opposto.
Analizzando la cella di conversione, con riferimento alla fig.2, si ha
non reversibilità: si pone vC = vP + vN >0
⇒ vP, vN ≥0
unidirezionalità: studiando i due interruttori con la convenzione degli utilizzatori, durante le
rispettive fasi di conduzione vale che
iP = iL >0 se P ON e N OFF
iN = -iL <0 se P OFF e N ON
8/25
Elettronica Industriale di Potenza II
Politecnico di Torino – Corso di Laurea a distanza in Ingegneria Elettrica
Si può quindi osservare che:
• l’interruttore P lavora nel solo primo quadrante (vP>0 e iP>0 per i due stati) e si può
realizzare con un transistor (interruttore comandato)
• l’interruttore N lavora in due quadranti (I e III, visto che non può generare) e si può
realizzare con un diodo (interruttore non comandato, che commuta in modo naturale in
funzione dello stato impresso dallo switch attivo).
Strutture fondamentali di conversione derivate dalla cella canonica.
La diversa disposizione di generatore e carico rispetto ai tre terminali del deviatore individua tre
strutture elementari di conversione, tutte non reversibili e unidirezionali (ovvero ad un
quadrante).
Tali strutture sono note come:
• Buck (≡step-down o chopper ad un quadrante): è la più nota e più intuitivamente
comprensibile delle strutture di conversione a commutazione forzata. Da un generatore “di
tensione” (natura capacitiva) alimenta un carico di natura induttiva potendo regolare la
tensione di uscita tra zero e la tensione di alimentazione. E’ una struttura diretta, ovvero
prevede tra gli stati istantanei di funzionamento la connessione diretta generatore - carico.
• Boost (≡step-up): duale del Buck. Struttura diretta con generatore di natura induttiva che
alimenta un carico di natura capacitiva. La tensione di uscita è necessariamente superiore a
quella del generatore, ed è regolabile tra quest’ultima e (idealmente) infinito.
• Buck-boost: struttura indiretta (in nessuno degli stati del deviatore generatore e carico sono
connessi) con generatore e carico entrambi di natura capacitiva, e ramo induttivo
cortocircuitato a massa che garantisce la continuità della corrente commutata.
Prodotto di commutazione della cella canonica.
La taglia degli interruttori statici di un convertitore è strettamente correlata con le due grandezze
elettriche fondamentali della cella canonica:
• VC : tensione commutata. E’ la tensione che il deviatore deve essere in grado di sostenere
stazionariamente e di commutare.
• IL : corrente commutata. E’ la corrente che il deviatore deve commutare tra le due maglie
corrispondenti agli estremi di deviazione.
Gli interruttori che compongono la cella canonica (transistor e diodo) devono poter sostenere la
tensione commutata permanentemente (quando sono aperti), per cui la taglia (ovvero il costo) in
tensione dei componenti è strettamente legata alla VC.
La corrente commutata viene ripartita tra transistor e diodo in ragione del duty-cycle. La
corrispondente ripartizione degli effetti termici (riscaldamento per conduzione) tra i due
componenti dipende quindi fortemente dal tipo di struttura e dalle condizioni di funzionamento
del convertitore. In ogni caso, anche la IL caratterizza fortemente la taglia dei componenti
(influenzandone quindi il costo).
Si può ritenere un valido indicatore del costo complessivo degli interruttori statici di un
convertitore, la somma dei prodotti VCIL delle celle canoniche che lo compongono.
E’ opportuno quindi definire una potenza apparente di dimensionamento, o prodotto di
commutazione della cella canonica come:
n
ADIM = ∑ (VC I L ) j
j =1
9/25
Elettronica Industriale di Potenza II
Politecnico di Torino – Corso di Laurea a distanza in Ingegneria Elettrica
che sintetizza (sommata su tutte le celle canoniche interessate) la taglia complessiva di un
convertitore (non direttamente legata ai valori distinti di corrente e tensione). Il passo
immediatamente successivo, nell’ottica di valutare l’economicità di un processo di conversione,
è quello di definire un fattore di costo kC:
kC =
Pu
≤1
ADIM
che indica come viene utilizzato il prodotto di dimensionamento del convertitore relativamente al
trasferimento di potenza al carico.
10/25
Elettronica Industriale di Potenza II
Politecnico di Torino – Corso di Laurea a distanza in Ingegneria Elettrica
Derivazione di strutture dalla cella canonica per disposizione dei circuiti esterni.
Convertitori diretti e indiretti.
Definizioni:
• Convertitori diretti: sono quelli che possono permettere, in una combinazione particolare
degli stati logici degli interruttori, la connessione diretta tra generatore ed utilizzatore.
• Convertitori indiretti: sono quelli che non possono permettere in nessun caso la connessione
diretta.
Convertitori diretti derivati da una cella canonica.
• Buck converter (step-down).
Si ottiene collegando il carico sul ramo induttivo ed il generatore (di tensione) sul lato SW del
deviatore.
Proprietà fondamentali:
trasferimento di tensione
Vout = DVgen
trasferimento di corrente
Iout = Igen/D
corrente commutata
IL = Iout
tensione commutata
VC = Vgen
prodotto di commutazione
ADIM = Vgen Iout
potenza di uscita
Pout = DVgen Iout
fattore di costo
KC = D
N.B. : la massima utilizzazione del prodotto di commutazione coincide con la connessione
diretta continuativa (D = 1).
• Boost converter (step-up).
Si ottiene collegando il generatore (di tensione) sul ramo induttivo ed il carico sul lato FW del
deviatore.
Proprietà fondamentali:
trasferimento di tensione
Vout = Vgen/(1-D)
trasferimento di corrente
Iout = (1-D)Igen
corrente commutata
IL = Igen
tensione commutata
VC = Vout
prodotto di commutazione
ADIM = Vout Igen
potenza di uscita
Pout = Vgen/(1-D) Iout
fattore di costo
KC = 1-D
N.B. : anche per il boost, come era facile aspettarsi, la massima utilizzazione del prodotto di
commutazione coincide con la connessione diretta continuativa (D = 0).
11/25
Elettronica Industriale di Potenza II
Politecnico di Torino – Corso di Laurea a distanza in Ingegneria Elettrica
Struttura indiretta derivata da una cella canonica.
• Buck-boost converter.
Si ottiene collegando generatore (di tensione) e carico sui rami capacitivi del deviatore, lasciando
un’induttanza pura sul ramo induttivo
Proprietà fondamentali:
trasferimento di tensione
Vout = D/(1-D) Vgen
trasferimento di corrente
Iout = (1-D)/D Igen
corrente commutata
IL = Iout + Igen
tensione commutata
VC = Vgen + Vout
prodotto di commutazione
ADIM = Vgen/(1-D)2 Iout
potenza di uscita
Pout = Vgen D/(1-D) Iout
fattore di costo
KC = D(1-D)
N.B. : il massimo fattore di costo è Kc=0.25 (un quarto rispetto alle strutture dirette), per D=0.5
(ovvero induttanza connessa per metà tempo al generatore, e per metà al carico).
12/25
Elettronica Industriale di Potenza II
Politecnico di Torino – Corso di Laurea a distanza in Ingegneria Elettrica
Convertitori DC/DC: scelta della struttura di conversione in funzione delle specifiche
e confronto tra i coefficienti di costo di strutture monoquadrante
Sistema fisico e requisiti funzionali.
Si richiede di scegliere il tipo di convertitore ed il relativo dimensionamento per l’azionamento
di un motore in corrente continua a magneti permanenti per l’alimentazione di un particolare
carico meccanico di potenza (mandrino per foratura di stampati).
Al motore è tipicamente richiesto il funzionamento a coppia nominale, Tnom, dalla velocità di
rotazione minima, ωmin, fino alla velocità massima, ωMAX, ma è richiesta anche la possibilità di
erogare, per brevi periodi, la coppia massima, TMAX, di sovraccarico. Le caratteristiche del
motore e le specifiche dell’azionamento vengono fornite nel seguito.
Per l’alimentazione di potenza del convertitore, presso l’utente sono disponibili due diverse
sorgenti di tensione continua, di seguito specificate.
Sorgenti di tensione disponibili.
1) rete da batterie elettrochimiche:
campo di valori di tensione: Vg1 = 48 V +5%/-10%.
2) tensione continua da raddrizzatore di una rete alternata, trifase (rete ±20% + ripple trifase):
campo di valori di tensione garantito: 210 V < Vg2 < 350 V.
Definizione del carico elettrico ai morsetti di armatura (va, ia)
Caratteristiche del motore:
- Tnom = 5 Nm;
TMAX = 12 Nm;
- nnom = 800 rpm;
nMAX = 3000 rpm;
- caratteristica di coppia:
T = kT×ia [Nm];
kT = 0,55 [Nm/A];
- caratteristica di velocità:
ω = (va - Ra×ia)/kT [rad/s];
Ra = 1,25 [Ω].
Il motore deve operare nel seguente intervallo di valori: [ωnom ÷ ωMAX, Tnom ÷ TMAX].
Per le due diverse alimentazioni, scegliere la struttura di conversione (diretta e/o indiretta)
appropriata per alimentare il carico.
Confrontare i coefficienti di costo kC delle diverse strutture.
Derivazione di una struttura bidirezionale per composizione di due celle canoniche.
Componendo due celle canoniche unidirezionali di direzionalità opposta (una con interruttore sul
lato positivo del generatore ed una con interruttore sul negativo) si ottiene una struttura che, a
seconda del verso della corrente nell’induttanza, si comporta:
• come un abbassatore (buck) da un generatore “capacitivo” ad un carico induttivo;
• come un elevatore (boost) da un generatore “induttivo” ad un carico “capacitivo”.
Un convertitore DC/DC bidirezionale può lavorare in due quadranti del piano corrente-tensione.
Questo significa, se ad esempio il carico è un motore elettrico, poter lavorare sia da motore che
da freno con recupero di energia.
Questa struttura bidirezionale costituisce inoltre la base per la conversione DC/AC (per produrre
una corrente alternata è infatti necessario che la corrente convertita possa essere indistintamente
dei due segni).
13/25
Elettronica Industriale di Potenza II
Politecnico di Torino – Corso di Laurea a distanza in Ingegneria Elettrica
Modulazione PWM nel ponte monofase.
Conversione DC/AC monofase.
Derivazione di una struttura bidirezionale per composizione di due celle canoniche.
Come già accennato, con la composizione di due celle canoniche unidirezionali di direzionalità
opposta si ottiene una struttura bidirezionale (a due quadranti), normalmente indicata come
“gamba di inverter” o “chopper a due quadranti”.
Questa, oltre a consentire la conversione DC/DC con recupero di energia (ad esempio per un
motore con frenatura rigenerativa), costituisce la base per la conversione DC/AC (inverter a
singola gamba con alimentazione sdoppiata).
La “gamba di inverter” può essere vista come un deviatore non reversibile, bidirezionale, che
interfaccia (nella configurazione tipo “convertitore diretto” della cella canonica) un sistema di
natura capacitiva (generatore di tensione o carico capacitivo) ed uno di natura induttiva
(generatore di corrente, o carico induttivo).
Rimanendo nell’ambito della conversione DC/DC, si supponga che il generatore sia sul lato
capacitivo ed il carico su quello induttivo. Gli interruttori attivi sono due (in serie tra i morsetti
lato capacitivo): è necessario imporre un vincolo di mutua esclusione dei due comandi in modo
da evitare il cortocircuito della tensione impressa VC. Se i due comandi sono definiti dalle
rispettive rettangole unitarie rP ed rN, il vincolo tra di loro deve essere :
rP + rN ≤ 1
(ovvero: solo un interruttore per volta può essere chiuso. Eventualmente entrambi possono essere
aperti).
Ipotizzando di comandare i due interruttori in modo complementare:
rP = 1 – rN = r
lo stato del chopper a due quadranti è gestito da un unico comando (ovvero da un unico dutycycle D, come per le strutture unidirezionali: D si riferisce all’interruttore attivo della cella P e
coincide con il DFW della cella N). La tensione (media) sull’uscita, è regolabile tra 0 e la tensione
di alimentazione (come nel buck), ma è possibile anche di “ricaricare” il generatore con una
corrente di verso “negativo” qualora il sistema “carico” abbia a disposizione della energia da
erogare (esempio: caricabatterie reversibile). All’inversione della corrente corrisponde un
comportamento da “boost”.
Modulazione PWM di convertitori DC/DC
La più classica e diffusa tra le tecniche di modulazione hard-switching è la PWM (Pulse-Width
Modulation).
Essa consiste nella comparazione tra una forma d’onda ripetitiva (o portante) a frequenza fissa
ed un segnale di riferimento (o modulante) costante. Normalmente si sceglie una portante
triangolare simmetrica: lo stato di ON dello switch viene così prodotto per intervalli di tempo
dipendenti linearmente dal valore del segnale modulante.
Il metodo si basa quindi sull’adattamento del duty-cycle al segnale di riferimento impostato.
La frequenza di modulazione, imposta dalla portante, può variare da pochi kilohertz a centinaia
di kilohertz.
14/25
Elettronica Industriale di Potenza II
Politecnico di Torino – Corso di Laurea a distanza in Ingegneria Elettrica
Inverter a singola gamba con alimentazione sdoppiata.
Con la stessa struttura a due quadranti e con il pilotaggio complementare dei due interruttori
attivi, è possibile ottenere un convertitore DC/AC, costituito collegando il ritorno del carico
(induttivo) al punto medio della alimentazione (capacitiva). Quest’ultimo è un punto che può
essere o meno accessibile (a seconda delle esigenze) e consente di definire un potenziale rispetto
al quale il potenziale di uscita presenta un’escursione simmetrica.
La connessione al punto medio permette di imprimere al carico una tensione reversibile
(istantaneamente: ±Vg/2, a seconda dell’interruttore comandato). La regolazione del duty-cycle
secondo un andamento sinusoidale permette di ottenere sull’uscita una tensione alternata di
ampiezza regolabile tra 0 e Vg/2.
Osservazioni:
• la tensione di uscita, ottenuta per modulazione di due stati, è scomponibile in una prima
armonica (che è la componente alternata desiderata sull’uscita) e da “residui di modulazione”
(la componente rettangolare alla frequenza di modulazione). La massima frequenza elettrica
ottenibile (quella del sistema AC di uscita) è vincolata ad essere opportunamente minore della
frequenza di modulazione (in genere almeno una decade).
• con questa struttura, la tensione di uscita nulla è ottenuta per modulazione di due stati estremi
opposti (volgarmente: per dare “niente” in uscita, l’inverter deve modulare tra “più tutto” e
“meno tutto”, ovvero lo zero si ottiene come valore medio di un’onda quadra ampia Vg/2).
Definizione dell’indice di modulazione della gamba di inverter.
L’indice di modulazione “M” è l’analogo, per la conversione DC/AC, del duty-cycle “D” della
conversione DC/DC. L’indice di modulazione istantaneo “m” deriva direttamente dalla
rettangola “r” di comando dell’interruttore attivo “alto” della gamba e ne caratterizza lo stato.
Ipotizzando il comando complementare dei due interruttori attivi, la tensione vista dal carico AC
assume i due valori possibili +Vg/2 o -Vg/2 a seconda che “r” sia, rispettivamente, 1 o 0. L’indice
di modulazione è lo stesso segnale logico a due livelli, ma riscalato per assumere i valori ±1, in
modo da esprimere lo stato della gamba simmetricamente rispetto allo zero, come si addice alle
grandezze alternate in uscita (lato AC). L’obiettivo è esprimere la tensione istantanea di uscita
come:
vout = m ⋅ Vg/2
Il legame con la rettangola di comando è:
m = 2 (r - ½)
Nella conversione DC/AC non è quindi possibile, per la singola fase, una funzione di
modulazione istantanea con un livello nullo (gli unici valori possibili sono +1 e −1; m=±1).
In termini di valore medio nel periodo di modulazione (lettere maiuscole):
Vout = M ⋅ Vg/2
M = 2 (D - ½)
Nell’ottica della conversione DC/AC polifase, l’indice di modulazione M della gamba varia con
continuità nell’intervallo di valori −1÷1 (−1≤ M ≤1).
Con un unico “bit” di comando, lo stato della gamba di inverter è pienamente definito.
15/25
Elettronica Industriale di Potenza II
Politecnico di Torino – Corso di Laurea a distanza in Ingegneria Elettrica
Dissipazione nella cella canonica.
Scomposizione nei termini di conduzione e commutazione.
Dissipazione nel singolo interruttore.
Le perdite degli interruttori della cella canonica possono essere distinte in due categorie: perdite
per conduzione e per commutazione.
• La caratteristica non ideale di conduzione sia del transistor (pedice SW) che del diodo (FW)
comporta una dissipazione media che, in forma generale, è esprimibile come:
(Pcond )SW ,FW = [VSW ,FW ( I L ) ⋅ I L ]DSW ,FW = (∆VSW ,FW + RSW ,FW I L ) ⋅ DSW ,FW I L
(1)
Si noti che la caduta di ON del componente è sempre relativa alla IL, mentre la corrente per cui è
moltiplicata è la corrente media condotta nel periodo di modulazione (DSWIL o DFWIL ,
rispettivamente). Per i componenti con caratteristica di conduzione resistiva (MOSFET),
l’espressione si semplifica ponendo ∆VSW= 0.
• Le perdite per commutazione sono dovute alla non istantaneità delle necessarie transizioni in
zona attiva del transistor durante la commutazione. La disposizione circuitale della cella
canonica impone una transizione di tensione ed una di corrente in prima approssimazione lungo
le rette corrispondenti a VC e IL. A seconda della durata di tali transizioni (relative sia al turn-ON
che al turn-OFF) il tempo di permanenza in zona attiva, e la relativa dissipazione aumentano o
diminuiscono concordemente. E’ utile esprimere l’energia persa per ogni commutazione (EON e
EOFF) nella forma:
Ecomm = EON + EOFF = 1 2 VC I L ⋅ (∆t ON + ∆t OFF ) = 1 2 VC I L ⋅ ∆t comm
(2)
che evidenzia la dipendenza dal prodotto delle grandezze commutate (VCIL) e da un tempo
equivalente di permanenza in zona attiva (∆tcomm). Quest’ultimo è legato alla durata effettiva del
complesso delle commutazioni, e tiene conto di una notevole complessità di fenomeni in
relazione al tipo di interruttori ed alle loro caratteristiche, oltre che al tipo e all’entità del
pilotaggio dell’interruttore attivo.
La dissipazione per commutazione è localizzata quasi esclusivamente nel transistor, per cui si
suppone di trascurare il termine relativo al diodo.
La potenza media dissipata per commutazione è il prodotto dell’energia di un ciclo completo
(ON+OFF) per la frequenza dei cicli (frequenza di modulazione fSW):
Pcomm = Ecomm ⋅ f SW = 1 2 VC I L ⋅ ∆t comm ⋅ f SW
(3)
Appare evidente quindi che le perdite per commutazione costituiscono un limite superiore per la
frequenza di modulazione.
transistor
diodo
(∆VSW
Pcond
+ RSW I L ) ⋅ D ⋅ I L
(∆VFW + RFW I L ) ⋅ (1 − D ) ⋅ I L
Pcomm
(VC I L ) / 2 ⋅ ∆t comm ⋅ f SW
≅0
Dimensionamento termico di un interruttore.
Scelto un interruttore per una data applicazione, calcolata la potenza persa in condizioni WorstCase (critiche, ovvero nella peggiore delle condizioni di lavoro che l’interruttore può essere
chiamato a svolgere), noti i vincoli termici dell’applicazione (temperatura ambiente, tipo di
dissipatore, ecc...), è necessaria la “verifica termica”: è necessario cioè verificare che la
temperatura di giunzione θj non raggiunga (con margine adeguato) i 150°C (valore massimo
garantito per transistor al silicio). Al di sopra di tale valore, infatti, tutte le caratteristiche
elettriche del componente (che sono funzione della temperatura) non sono più garantite.
16/25
Elettronica Industriale di Potenza II
Politecnico di Torino – Corso di Laurea a distanza in Ingegneria Elettrica
Utilizzando un modello elettrico equivalente (a parametri concentrati) della conduzione del
flusso termico (PSW,FW) dalla giunzione all’ambiente (rispettivamente alle temperature θj e θa) si
ottiene (a regime):
θ j = θ a + (ℜ jc + ℜ cs + ℜ sa ) ⋅ PSW , FW
(4)
dove:
ℜjc [°/W]: resistenza termica giunzione-case (Junction to Case);
ℜcs [°/W]: resistenza termica case-dissipatore (Case to heatSink);
ℜsa [°/W]: resistenza termica dissipatore-ambiente.(Sink to Air).
Inoltre:
θ s = θ a + ℜ sa ⋅ PSW , FW
(5)
θ c = θ s + ℜ cs ⋅ PSW , FW
(6)
θ j = θ c + ℜ jc ⋅ PSW , FW
(7)
Le caratteristiche relative al componente (ℜjc e ℜcs) sono fornite dal costruttore, mentre quelle
del dissipatore devono essere adattate opportunamente, con eventuale ricorso a raffreddamento
per ventilazione forzata (ventole) o convezione forzata di fluido refrigerante.
Dissipazione della cella canonica.
Le perdite complessive di una cella canonica unidirezionale sono esprimibili come:
Pcella = Pcond + Pcomm ≅ ( Pcond + Pcomm ) SW + Pcond , FW
(8)
attribuendo al solo transistor le perdite per commutazione.
Per valutare l’efficienza energetica del convertitore è comodo rendere l’espressione della
dissipazione complessiva indipendente da D. Si utilizzano quindi dei parametri di caduta di
conduzione equivalente, mediamente validi sia per il diodo che per il transistor. Se le
caratteristiche di conduzione dei due interruttori sono coincidenti, o se il D di lavoro è intorno al
50% è corretto utilizzare:
∆VSW + ∆VFW
R + RFW
∆Veq =
; Req = SW
(9)
2
2
(in casi diversi la media va ponderata opportunamente, ma non si discosta molto).
In sintesi:
Pcella = ∆Veq I L + Req I L2 + 1 2 VC I L ∆t comm f SW = f I L ; I L2 ;VC ; f SW ; componenti
(10)
dove si sono intesi come caratteristiche dei componenti i termini rappresentativi della caduta di
conduzione ed il tempo equivalente di commutazione.
(
)
17/25
Elettronica Industriale di Potenza II
Politecnico di Torino – Corso di Laurea a distanza in Ingegneria Elettrica
Dinamica della commutazione forzata
Per lo studio della dinamica della commutazione controllata, è conveniente utilizzare un
approccio semplificato, di tipo lineare a tratti. In ciascuno dei “tratti” i componenti non lineari
(transistor e diodo) vengono rappresentati con modelli linearizzati, validi per ben precisi
intervalli delle variabili elettriche del circuito di potenza e/o di pilotaggio. Il passaggio da un
tratto al successivo consiste nel passaggio da un modello lineare al successivo di uno dei due
componenti coinvolti e produce una analisi scandita da intervalli temporali ben distinti.
Procedura:
− si determina la sequenza delle diverse fasi;
− si identificano le condizioni iniziali e finali di ogni intervallo di funzionamento ed i relativi
modelli;
− si uguagliano le condizioni iniziali e finali di due tratti successivi.
E’ necessario descrivere in modo semplificato la dinamica e del circuito di pilotaggio e di quello
di potenza.
Modello dinamico del transistor di potenza (MOSFET e IGBT):
si può assimilare a un circuito composto da tre capacità connesse a triangolo tra i terminali del
transistor e un generatore a transconduttanza.
Circuito di pilotaggio:
il passaggio tra i livelli di pilotaggio (vGS) di ON e di OFF avviene a “corrente impressa”. Il
modello di circuito di pilotaggio è quindi un generatore di corrente che stazionariamente (a
commutazione avvenuta) ritorna ad essere un generatore di tensione (sfioratore).
Circuito di potenza:
Il circuito esterno, collegato ai morsetti di potenza del transistor, è modellato come:
− un generatore di corrente IL, che equivale alla corrente commutata e condotta nello stato di
ON;
− un generatore di tensione VC, che equivale alla tensione commutata;
− un diodo per garantire il ricircolo libero della corrente induttiva nel generatore di tensione
durante l’interdizione del transistor.
Le diverse fasi della commutazione della cella sono distinte dagli eventi che portano alla
variazione del modello di ogni dispositivo.
Dinamica della transizione di corrente
Avviene a tensione costante VC = vDS (diodo in conduzione coincidente con cortocircuito). Dal
circuito si nota come l’unica tensione variabile sia la vGS: analizzando l’influenza del partitore
capacitivo sulle correnti ed introducendo la legge della transconduttanza si ricava che:
iP
i& = g fs ⋅ v&GS =
dove Ci = CGS+CDG è definita capacità di ingresso.
C i ⋅ g −fs1
La derivata di corrente si può quindi controllare in modo proporzionale alla corrente di
pilotaggio.
Il valore τ i = g −fs1 ⋅ C i si definisce costante di tempo della transizione di corrente ed è ricavabile
dai cataloghi.
18/25
Elettronica Industriale di Potenza II
Politecnico di Torino – Corso di Laurea a distanza in Ingegneria Elettrica
Dinamica della transizione di tensione
Avviene a corrente costante IL nel transistor (il diodo è OFF). Le variabili di stato del circuito
sono due (si ha infatti una maglia chiusa di tre capacità): si scelgono vGS e vDS (ossia l’effetto del
pilotaggio e la tensione di uscita). Si dovrebbe risolvere un sistema differenziale del secondo
ordine. La presenza delle due variabili di stato complica quindi la descrizione.
Si può dimostrare che, significativamente:
i
v& DS = − P dove CDG è detta capacità di reazione, anch’essa ricavata dai cataloghi (è la Crss).
C DG
Analisi delle commutazioni
- Apertura (TURN OFF):
Gli andamenti sono assimilabili a quelli ideali già considerati (“triangolari”). Tenendo conto dei
fenomeni dinamici, la transizione di tensione di apertura (ON→OFF) avviene con un raccordo
con una costante di tempo τV.
1
L’energia dissipata in apertura è sostanzialmente pari a EOFF = VC I L ∆t OFF .
2
Nel caso degli IGBT c’è un fenomeno peculiare (dovuto alla struttura intrinseca del
componente) che influenza la dissipazione in apertura: è il tail o coda di estinzione della
corrente. Esso caratterizza l’ultima parte dell’estinzione della corrente e “sfugge” al pilotaggio.
Durante il tempo di tail, il decadimento è dominato da una costante di tempo propria del
componente detta τtail. Definito un coefficiente htail come rapporto tra la corrente commutata e la
corrente a cui inizia il tail, l’energia dissipata in tale periodo si può esprimere come:
∆t
1
Etail = VC I L tail
2
htail
I parametri relativi al tail sono ricavabili dai data sheet dei vari IGBT.
- Chiusura (TURN ON):
Questa transizione è, nella realtà, decisamente più complessa di quanto visto nel caso ideale.
La transizione di corrente segue la traiettoria ideale a rampa (fino a raggiungere il valore IL). A
questo punto dovrebbe iniziare la transizione di tensione, ma in effetti essa viene ritardata a
causa del reverse recovery del diodo di ricircolo: la corrente nel transistor continua a salire con
derivata costante fino ad un valore IL + IRR per un tempo addizionale detto tempo di storage.
La maggiore corrente IRR e il maggior tempo di crescita ∆tsg sono determinati dal diodo e
discendono dal fatto che lo stato di conduzione dipende dalla presenza di portatori di carica
liberi, la cui quantità è legata alla corrente diretta condotta. La presenza di queste cariche libere
fa si che la giunzione abbia caratteristiche di conduzione: è così possibile che la corrente diventi
transitoriamente negativa. Il diodo, per cambiare stato, necessita quindi di tale corrente
transitoria che permetta il riassorbimento della carica : vale che I RR = i& ⋅ ∆t sg
Il diodo poi si apre comportandosi come una capacità variabile (fase di transition lunga ∆ttrans).
Questa fase può avere durate diverse a seconda del tipo di diodo (snap-off, con transizione
brusca e possibili problemi di EMC; soft, dove il decadimento è a derivata limitata). Il recovery
time ∆tRR è la somma del tempo di storage e di quello di transizione.
1
La quantità di carica di reverse recovery è pari a Q RR = I RR ∆t sg + I RRτ SR , considerando distinte
2
le fasi di storage e transition. τSR è la costante di tempo equivalente del decadimento nella fase di
transition. I dati relativi alla fase di recovery si possono ricavare dai data sheet.
19/25
Elettronica Industriale di Potenza II
Politecnico di Torino – Corso di Laurea a distanza in Ingegneria Elettrica
Fondamenti di conversione DC/AC monofase.
Generalità.
Avendo a disposizione una struttura di conversione a quattro quadranti (come ad esempio la già
introdotta gamba di inverter ad alimentazione sdoppiata) è possibile realizzare una conversione
DC/AC modulando in uscita una tensione alternata rispetto all’ingresso in continua (lato VC).
Per semplicità, è utile immaginare il lato AC come una successione di stati in continua ottenuti
per valori diversi dell’indice di modulazione impostato. In questo caso, l’unica differenza è che,
a regime, la tensione media sull’induttanza è nulla non più nell’ambito di ogni periodo di
modulazione, bensì nell’intero periodo elettrico. Trascurando il ripple di modulazione, quindi, il
convertitore DC/AC monofase può essere visto, dal lato in alternata, come un alimentatore a
tensione regolabile (in frequenza ed ampiezza) con una induttanza serie come “caduta interna”
(nel caso il carico sia un motore, l’induttanza è quella del motore stesso).
Definizioni.
E’ opportuno introdurre alcuni parametri caratterizzanti le prestazioni ed il dimensionamento dei
convertitori DC/AC.
Modo comune e modo differenziale: rappresentano la tensione (istantanea e media) vista dal
carico in termini di “polarizzazione rispetto al mondo circostante” (modo comune) e tensione ai
capi (modo differenziale).
Massima ampiezza di tensione AC ottenibile: corrisponde all’ampiezza unitaria dell’indice di
modulazione “differenziale” (ovvero di quello effettivo visto dal carico). In pratica, corrisponde
allo “sfioramento” della alimentazione in continua da parte della tensione AC totale (carico più
induttanza).
Ponte monofase.
Associando due gambe di inverter ad un carico in AC di natura induttiva si realizza un inverter
monofase con la massima elasticità di funzionamento. Lo stato istantaneo e medio di ogni gamba
è descritto dal corrispondente indice di modulazione ( m1 , m2 = ±1; M 1 , M 2 = −1 ÷ 1 ). La
composizione dei due indici ai fini della produzione di tensione sul carico caratterizza la tecnica
di modulazione utilizzata. Diverse scelte sono possibili, ma lo spettro può essere racchiuso dai
due casi estremi: modulazione bipolare naturale e bipolare controfase. Ricordando che la
tensione vista dal carico è il “modo differenziale” delle tensioni ai due morsetti, risulta
opportuno introdurre gli indici di modulazione di modo differenziale e comune per
caratterizzare, dati gli indici di gamba, la parte di tensione utile da quella di modo comune:
m − m2
md = 1
2
m + m2
mc = 1
2
La presenza di tensione di modo comune, in generale, implica emissioni elettromagnetiche da
parte del convertitore.
20/25
Elettronica Industriale di Potenza II
Politecnico di Torino – Corso di Laurea a distanza in Ingegneria Elettrica
Modulazione di convertitori DC/AC.
I convertitori DC/AC (INVERTER) possono essere modulati in modi diversi a seconda della
qualità della forma d’onda richiesta in uscita.
Sostanzialmente le possibilità sono due:
− modulazione PWM
− modulazione ad onda quadra (square wawe).
La modulazione PWM è analoga a quella descritta per i convertitori DC/DC: questa volta la
modulante non è più costante ma “ricopia “ la forma d’onda di tensione da generare in uscita. Si
ha quindi la possibilità di controllare completamente l’uscita: l’ampiezza e la frequenza della
sinusoide desiderata si possono modificare variando ampiezza e frequenza del riferimento.
Anche la forma d’onda può essere immaginata di natura qualsiasi (sinusoidale, trapezia ecc.).
Da notare è che la frequenza fSW della forma d’onda triangolare portante deve essere nettamente
superiore a quella della fondamentale f1 desiderata in uscita. Così facendo si ricostruisce la forma
d’onda alternata con un numero elevato di periodi di modulazione (evitando effetti di
aleatorietà)e si ottenengono componenti armoniche a frequenza sufficientemente più alta della f1
impostata.
La modulazione ad ONDA QUADRA consiste nel produrre in uscita una tensione alternata di
forma quadra con due sole commutazioni per periodo elettrico. L’ampiezza dell’onda quadra è
data dalla continua d’alimentazione, ovvero non è regolabile dall’inverter stesso. Volendo
regolare l’ampiezza dell’uscita è necessario avere uno stadio di alimentazione controllabile (VC
da raddrizzatore attivo o da chopper).
Il vantaggio di questa tecnica è il sostanziale annullamento delle perdite per commutazione, che
però è accompagnato da una forma d’onda di uscita di qualità decisamente inferiore.
21/25
Elettronica Industriale di Potenza II
Politecnico di Torino – Corso di Laurea a distanza in Ingegneria Elettrica
Analisi di differenti tipi di modulazione PWM.
Le tecniche analizzate di seguito sono adottabili per l’H-BRIDGE sia nel caso DC/DC che nel
caso DC/AC.
Modulazione bipolare naturale.
Consiste nel comandare le due gambe in modo complementare tramite la stessa modulante
confrontata con segno opposto con un’unica portante. Realizza (con due gambe ed una
alimentazione metà) prestazioni identiche a quelle dell’inverter a singola gamba ed
alimentazione sdoppiata. Le commutazioni delle due gambe, infatti, sono contemporanee, per cui
il grado di libertà derivante dalla presenza della seconda gamba non è sfruttato. Di conseguenza,
il coefficiente di costo è identico, pur risultando da componenti diversi in numero e taglia (due
gambe di taglia metà). Questa tecnica, in pratica, non presenta sostanziali vantaggi rispetto
all’inverter a singola gamba, ovvero non giustifica di per sé l’adozione della doppia gamba.
Le equazioni che caratterizzano la tensione d’uscita sono le seguenti:
v out = m d VC
m1 = −m 2 ⇒ m d = m1 ⇒ v out = m1VC
Vout = M 1VC ⇒ Vout , MAX = VC
ADIM = 4 ⋅ VC I L
Pout , MAX =
1
2
VC I L cos ϕ
mc = 0
Modulazione bipolare controfase.
Gli indici di modulazione di riferimento delle due gambe sono invertiti e sono confrontati con
stesso segno con un’unica portante. Si ottengono commutazioni di gamba con duty-cycle
complementari (come prima), ma non contemporanee. I valori medi di tensione forniti dalle due
gambe sono identici a quelli della tecnica bipolare naturale, per cui anche la tensione media
fornita al carico non cambia. La frequenza complessiva di commutazione vista dal carico è però
doppia rispetto a quella di commutazione della singola gamba, ed inoltre la tensione istantanea
sul carico è sempre di verso concorde con quella della tensione media voluta (ovvero sono
disponibili sul carico tre stati di modulazione: 0, VC/2, -VC/2). Questi vantaggi si traducono
essenzialmente in un maggiore qualità della conversione (minore ripple di corrente, aumento
della dinamica di regolazione), ma comportano, rispetto alla modulazione bipolare naturale, un
residuo di modulazione sul modo comune (ovvero il punto medio del carico “balla” rispetto al
mondo esterno).
Equazioni descrittive:
v out = m d VC
m1 (t ) = −m 2 (t − T 2 ) ⇒ M 1 = − M 2
M d = M 1 ⇒ Vout , MAX = VC
ADIM = 4 ⋅ VC I L
Pout , MAX =
Mc = 0
22/25
1
2
VC I L cos ϕ
Elettronica Industriale di Potenza II
Politecnico di Torino – Corso di Laurea a distanza in Ingegneria Elettrica
Conversione DC/AC polifase. 3Φ
ΦVSI.
Generalità.
La composizione di tre gambe di inverter agenti su uno stesso “bus” capacitivo permette la
conversione DC/AC trifase a tensione impressa (3-phase Voltage Supplied Inverter).
Immaginando inizialmente che il centro-stella del carico sia equipotenziale al punto medio della
alimentazione, la struttura trifase non è altro che una terna di inverter monofase a singola gamba
ed alimentazione sdoppiata. Imponendo che gli indici di modulazione costituiscano una terna
sinusoidale simmetrica, si ottiene, sul carico, una alimentazione trifase simmetrica
corrispondente.
Si ottiene che: -la tensione fase-neutro Vfn è ricostruita come una gradinata a due soli valori
(±Vg/2) e quindi è di qualità scadente
- si realizzano tre tensioni indipendenti (le tre gambe sono modulate con comandi indipendenti).
Sistemi a neutro isolato.
Per ottenere migliori prestazioni si isola il centro-stella del motore (N, neutro) dal punto medio
della alimentazione (M).
Per analizzare il sistema si deve considerare che:
− il sistema di conversione deve produrre la tensione sulla singola fase rispetto al punto N
dell’utilizzatore;
− il trasferimento in tensione della cella si rappresenta in modo adeguato rispetto al
potenziale di riferimento M. Rispetto ad esso, infatti, il potenziale di uscita della cella
presenta un’escursione perfettamente simmetrica che perciò consente una appropriata
descrizione di una tensione alternata.
Definizioni.
E’ opportuno introdurre alcuni parametri caratterizzanti le prestazioni ed il dimensionamento dei
convertitori DC/AC.
Modo comune: rappresenta la tensione (istantanea e media) vista dal carico in termini di
“polarizzazione rispetto al mondo circostante” (modo comune).
Massima ampiezza di tensione AC: coincide con una ampiezza unitaria dell’indice di
modulazione “differenziale” (ovvero di quello effettivo visto dal carico). In pratica, corrisponde
allo “sfioramento” della alimentazione in continua da parte della tensione AC totale (carico più
induttanza).
Analisi del sistema.
Obiettivo: ricavare i possibili stati per la tensione vfN.
Gli stati delle gambe di inverter sono definiti tramite gli indici di modulazione istantanei di fase
(o indici di cella) mfM, di valore ±1.
Ipotesi: si considera un carico trifase simmetrico e equilibrato.
Vg
Tensione fase-M ⇒ v fM = m fM
2
Tensione fase-N ⇒ v fN = v f = v fM + v MN , dove vMN è il modo comune del convertitore.
La tensione vMN si può ottenere modellizzando la tensione vfN come v fN = v f = Zi f + e f ed
applicando il teorema di Millman.
Poiché il sistema trifase è a neutro isolato, la somma delle correnti al nodo N è nulla e quindi si
ottiene che
23/25
Elettronica Industriale di Potenza II
Politecnico di Torino – Corso di Laurea a distanza in Ingegneria Elettrica
3
∑ v fM = ∑ e fN + 3v NM , dove però
3
3
∑e
f =1
f =1
f =1
fN
= 0 perché il sistema è simmetrico
Pertanto
v NM =
1 Vg
3 2
3
∑m
fM
: il modo comune rende interdipendenti le diverse componenti fase-neutro.
f =1
Inoltre, mentre mfM è una funzione a due soli valori, mc =
1 3.
∑ m fM è una funzione multilivello.
3 f =1
La tensione fase-neutro vale quindi:
Vg 1 Vg 3
v fN = v fM + vMN = m fM
−
∑ m fM
2 3 2 f =1
Permutando gli indici si possono così ottenere i punti di funzionamento dell’inverter trifase sul
piano trifase: congiungendo i punti ottenuti si ottiene un esagono regolare che racchiude i punti
di regolazione possibile del convertitore.
L’esagono regolare definisce il massimo valore fisico delle componenti fase-neutro: il massimo
2
valore istantaneo vale Vg .
3
Gestione del modo comune M C*
I sistemi a neutro isolato si possono suddividere in due gruppi:
- con neutro non gestito (e quindi M C* = 0, che è una scelta ben precisa)
- con neutro gestito.
Nei primi la modulante M *fM ha forma sinusoidale: si nota che la sinusoide è ricostruita in modo
più accurato (sinusoide a 5 valori) con riduzione del ripple di corrente rispetto al caso con M≡N.
Nei secondi si sfrutta la reiezione di modo comune, tipica dei sistemi a neutro isolato, per
modificare la modulante e sfruttare al meglio la portante.
Gestire il modo comune M C* , cioè agire sulla modulante, significa aggiungere una opportuna
forma d’onda di terza armonica al riferimento: gli indici di cella M *fM vengono distorti, ma viene
mantenuto inalterato il contenuto armonico fase-neutro.
Iniettando una forma d’onda pseudo-triangolare di terza armonica, a parità di valore dell’indice
)
di modulazione (ad esempio per il valore massimo M fM = 1 ) si ottiene un incremento della
componente fondamentale della tensione fase-N vfN (e cioè degli effetti utili) pari al 15% (il
Vg
Vg
valore massimo passa cioè da
a
). L’aggiunta della componente di terza armonica non
2
3
si ripercuote sul carico in quanto, essendo a neutro isolato, è sensibile alle tensioni concatenate.
24/25
Elettronica Industriale di Potenza II
Politecnico di Torino – Corso di Laurea a distanza in Ingegneria Elettrica
Analisi della linearità
Dopo aver definito l’esagono limite, è possibile definire il cerchio inscritto, che rappresenta il
limite di ampiezza di una forma d’onda generica. Si deve però considerare come tale limite fisico
di tensione venga raggiunto: è conveniente avere un trasferimento lineare per avere perfetta
coerenza tra la forma d’onda impostata e quella realizzata.
Considerando il caso in cui il modo comune non viene gestito ( M C* = 0), il modulo della tensione
Vg
fase-N raggiungibile in linearità è ≤
, infatti
2
Vg
v fN = v fM − v NM , ma vNM =0 a causa del tipo di gestione ⇒ v fN = v fM = M fN
. Essendo, per
2
definizione, MfN ≤ 1 (nel caso in cui si consideri la comparazione con una triangola unitaria), si
Vg
verifica che, effettivamente, v fN ≤
.
2
Il luogo limite per la linearità diventa quindi il cerchio inscritto all’esagono con i lati ortogonali a
i semiassi trifase fase-N.
Gestire il modo comune significa sfruttare tale grado di libertà per ritardare la saturazione
dell’indice M *fM . Il massimo effetto utile si ha rendendo uguali e contrari (cioè bilanciati) gli
inviluppi positivi e negativi degli indici di modulazione di fase assegnati alle tre gambe di
inverter ( M *fM ), ossia ai rispettivi modulatori di fase. Così facendo, infatti, si evita che un indice
possa superare l’unità (ampiezza massima nel caso di triangola unitaria) quando il modulo degli
1
2
altri due è minore di uno. Si sceglie quindi M c* = − (E P + E N ) , dove EP ed EN sono gli inviluppi
positivo e negativo degli indici fase-N.
Sommando il modo comune M C* sopra definito agli indici fase-N M *fN , si distorce la forma
d’onda degli indici di cella (fase-M) M *fM : così facendo si estende il campo di linearità della
modulazione del 15%.
Il luogo limite per la linearità diventa così il cerchio inscritto all’esagono esterno.
Il campo di linearità non è ulteriormente estendibile. Spostandosi dalla linearità si commettono
errori di trasferimento e pertanto si ottengono forme d’onda non sinusoidali diverse da quelle
impostate. Il caso limite è il six-step: si modula ad onda quadra muovendosi nel verso delle fasi
sui vertici dell’esagono più esterno.
25/25