Nome file k:\scuola\corsi\corso fisica\meccanica\sistemi di riferimento\sistemi di riferimento.doc
Elaborato il 14/05/2004 alle ore 23.00.48, salvato il 14/05/04 8.00
Creato il 09/01/2003 23.39.00
stampato il 14/05/2004 23.00.00
Dimensione file: 48640 byte
Web: http://digilander.iol.it/profzucchini
Sistemi di riferimento inerziali
r
r
Partiamo dalla seconda legge della dinamica essendo F la forza “vera” agente sul corpo di massa m e a
l'accelerazione osservata nel sistema di riferimento considerato
r
r
F = ma
Come vedremo questa risulta essere valida solamente in particolari sistemi di riferimento detti inerziali o
Galileiani mentre in ogni altro sistema di riferimento non inerziale la seconda legge della dinamica non è
verificata
r
r
F ≠ ma
r
In pratica l'accelerazione a deve essere misurata in un sistema di riferimento non accelerato.
Le ipotesi alla base della meccanica classica sono:
1. lo spazio è omogeneo
2. lo spazio è isotropo
3. le leggi di Newton sono valide in sistemi di riferimento inerziali
4. è valida la legge di gravitazione universale
Come individuare i sistemi di riferimento inerziali. ?
Possiamo dire genericamente che le forze “vere” diminuiscono all'aumentare della distanza tra i corpi:
1. forza di contatto: si annullano se i corpi non si toccano
2. forza di gravità ed elettrica: ∝
1
proporzionali all’inverso del quadrato della distanza fra i corpi
r2
3. forze generiche diminuiscono almeno come ∝
1
r2
nei sistemi non inerziale esistono forze indipendenti dalla distanza fra i corpi che sembrano agire su tutti i corpi
riferiti al sistema di riferimento considerato.
Un tipico esempio è la forza che si sente su un mezzo che sta accelerando o rallentando.
Un buon sistema di riferimento inerziale potrebbe essere costruito nel seguente modo:
considerando che le stelle sono mediamente molto lontane le une dalle altre e certamente sono molto lontane
dalla terra, si potrebbe scegliere di orientare gli assi del nostro sistema di riferimento verso le stelle più lontane,
tali da non evidenziare moti apparenti rispetto alla Terra; il sistema così costruito e tutti quelli in moto rettilineo
uniforme rispetto a questo sono sistemi inerziali.
Al contrario sistemi ancorati alla Terra sono inerziali solo in prima approssimazione, infatti la Terra ruota su sé
stessa in 24 ore e quindi assumendo il raggio medio terrestre si ha che un punto fermo sulla superficie subisce
r v2
cm
= ω 2 RT ≈ 3.4 2 piccola ma misurabile e concausa, insieme allo
una accelerazione centripeta a =
RT
s
schiacciamento ai poli, dei differenti valori di accelerazione di gravità registrata alle diverse latitudini.
1/7
Nome file k:\scuola\corsi\corso fisica\meccanica\sistemi di riferimento\sistemi di riferimento.doc
Elaborato il 14/05/2004 alle ore 23.00.48, salvato il 14/05/04 8.00
Creato il 09/01/2003 23.39.00
stampato il 14/05/2004 23.00.00
Dimensione file: 48640 byte
Web: http://digilander.iol.it/profzucchini
Trasformazioni di Galileo
Invarianza Galileiana
Le leggi fondamentali della fisica sono identiche in tutti i sistemi di
riferimento che si muovono di moto rettilineo uniforme, non accelerato,
l'uno rispetto all'altro
L'ipotesi fondamentale della invarianza Galileiana consente di ritenere le leggi fisiche scoperte in un certo
sistema di riferimento inerziale estendibili ad un qualsiasi altro sistema di riferimento inerziale.
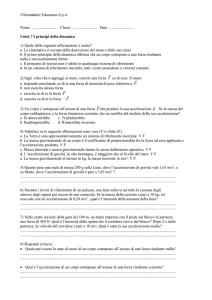
Andiamo ora alla ricerca delle equazioni di trasformazione tra un sistema di riferimento inerziale oxyt in quiete
r
e un altro sistema di riferimento inerziale o’x’y’t’ in moto rettilineo uniforme rispetto al primo a velocità v
parallela all’asse x: al tempo t = t ′ = 0 le 2 origini coincidono o = o′ .
Analizziamo la figura e determiniamo le relazioni
fra le coordinate del punto P indicato nei 2 sistemi di
riferimento inerziali.
Avremmo nel sistema accentato il punto di
coordinate P( x′, y ′, t ′) mentre rispetto al sistema di
riferimento in quiete avremmo P( x, y, t ) .
Dalla figura risulta evidente l'uguaglianza delle due
ordinate come dei due tempi (quest’ultima
uguaglianza indicata dall’esperienza comune ma
come vedremo non valida per alte velocità, prossime
a quella della luce ) mentre per l’ascissa dovremo considerare anche il moto relativo fra i due sistemi:
v
x = x′ + v t
complessivamente potremmo quindi indicare le equazioni di trasformazione da un sistema all'altro con la
seguente terna di eguaglianza
v
⎧ x = x′ + v t ′
⎪
o l'equivalente inversa
⎨ y = y′
⎪t = t ′
⎩
v
⎧ x′ = x − v t
⎪
⎨ y′ = y
⎪t ′ = t
⎩
Le leggi fondamentali della fisica hanno la stessa forma in due sistemi di
riferimento collegati da una trasformazione galileiana
Ricaviamo le equazioni di trasformazione per le velocità:
r
r ∆S
v=
∆t
2/7
Nome file k:\scuola\corsi\corso fisica\meccanica\sistemi di riferimento\sistemi di riferimento.doc
Elaborato il 14/05/2004 alle ore 23.00.48, salvato il 14/05/04 8.00
Creato il 09/01/2003 23.39.00
stampato il 14/05/2004 23.00.00
Dimensione file: 48640 byte
Web: http://digilander.iol.it/profzucchini
v
⎧⎪ x1′ = x1 − v t1
v
Indicando ∆x′ = x2′ − x1′ e ∆t ′ = t 2′ − t1′ avremo ⎨
x2 − x1 ) − v (t 2 − t1 )
v da cui ∆x′ = (1
4
2
4
3
123
⎪⎩ x2′ = x2 − v t 2
∆x
∆t
e quindi
v
∆x′ ∆x − v ∆t
v
v′x =
=
= vx − v
∆t ′
∆t
v′y = v y
e le equivalenti
v
⎧⎪v x = v′x + v
⎨
⎪⎩v y = v′y
Possiamo anche ricavare dalle trasformazioni di Galileo la relazione fra le accelerazioni misurate nei due
sistemi di riferimento:
r
r
Avremo in generale che ∆v = ∆v′ e quindi
r r
a = a′
Quest’ultima relazione è di fondamentale importanza perché ci garantisce che le forze osservate nei due sistemi
r
r
r
r
di riferimento inerziali saranno le stesse, infatti F = ma = ma ′ = F ′
Gli osservatori nei due sistemi di riferimento inerziali troveranno le stesse forze agenti sui corpi considerati e
quindi concorderanno sulle cause dei fenomeni studiati.
Proviamo ora ad utilizzare le equazioni di trasformazione trovate in alcuni semplici casi
⎧ x′ = 0
1. il punto P è in quiete nel sistema accentato e coincide con l'origine ⎨
⎩ y′ = 0
v
⎧x = v t ′
v
⎪
⎪⎧v x = v
⎨y = 0
⎨
⎪⎩v y = 0
⎪t = t ′
⎩
nel sistema in quiete le equazioni di trasformazione Galileiana ci dicono che il punto P si muove in moto
r
rettilineo uniforme a velocità v .
2. movimento di P lungo l’asse verticale del sistema accentato
⎧ x′ = 0
⎨ ′
⎩ y = −V y′t ′
avremo allora
v
⎧x = v t′
⎪
⎨ y = −V y′t ′
⎪
⎩t = t ′
v
⎧⎪v x = v
⎨
⎪⎩v y = −V y′
r
3. il punto P si muove nel sistema di riferimento accentato di moto rettilineo uniforme a velocità V ′ di
direzione non parallela agli assi
3/7
Nome file k:\scuola\corsi\corso fisica\meccanica\sistemi di riferimento\sistemi di riferimento.doc
Elaborato il 14/05/2004 alle ore 23.00.48, salvato il 14/05/04 8.00
Creato il 09/01/2003 23.39.00
stampato il 14/05/2004 23.00.00
Dimensione file: 48640 byte
Web: http://digilander.iol.it/profzucchini
⎧ x′ = Vx′t ′
⎨ ′
⎩ y = V y′t ′
avremo allora
v
v
⎧ x = Vx′t ′ + v t ′ = (Vx′ + v )t ′
⎪
⎨ y = V y′t ′
⎪
⎩t = t ′
v
⎧⎪v x = Vx′ + v
⎨
⎪⎩v y = V y′
4. Il punto P descrivere la caduta di un grave nel sistema accentato
avremmo allora
⎧ x′ = 0
⎪
⎨
1 2
⎪⎩ y ′ = − 2 gt + h
nel sistema in quiete le equazioni di trasformazione Galileiana ci dicono che il punto P si muove di moto
parabolico
v
⎧x = v t′
⎪
1 2
⎪
⎨ y = − gt ′ + h
2
⎪
′
t
=
t
⎪
⎩
v
⎧⎪v x = v
⎨
⎪⎩v y = v′y = − gt ′
Sistemi di riferimento NON inerziali
r
r
r
Ritorniamo al secondo principio della dinamica F = ma I avendo indicato con a I l’accelerazione misurata in un
sistema di riferimento inerziale.
Consideriamo ora un sistema di riferimento non inerziale, ovvero tale da avere rispetto agli inerziali
r
un’accelerazione a0 .
r
r
r
L’accelerazione misurata nel sistema NON inerziale sia a e come detto in precedenza si avrà F ≠ ma .
Analizzando alcuni esempi risulta chiaro che dovrà valere la relazione
r
r r
a I = a + a0
che lega le accelerazioni considerate.
r
r
r r
r
r r
r
r
r
Potremo scrivere quindi F = ma I = m(a + a0 ) da cui si avrà F − ma0 = ma e quindi F + F0 = ma
Nel sistema di riferimento NON inerziale il prodotto massa per accelerazione misurata nel sistema è uguale alla
r r
r
r
somma delle forze F + F0 con F0 = −ma0
Se si eseguono misure in un sistema di riferimento non inerziale dovremo sempre considerare l’accelerazione
r
r
r
del sistema a0 e quindi le forze del tipo F0 = −ma0 chiamate forze fittizie o apparenti non essendo dovute a
cause reali ma solo generate dal particolare stato di moto del sistema.
L’analisi di alcuni esempi potrà essere di chiarimento
4/7
Nome file k:\scuola\corsi\corso fisica\meccanica\sistemi di riferimento\sistemi di riferimento.doc
Elaborato il 14/05/2004 alle ore 23.00.48, salvato il 14/05/04 8.00
Creato il 09/01/2003 23.39.00
stampato il 14/05/2004 23.00.00
Dimensione file: 48640 byte
Web: http://digilander.iol.it/profzucchini
Ascensore in caduta libera
Considero il sistema di riferimento non inerziale attaccato ad un ascensore in caduta libera con asse orientato
verso l’alto.
r
La forza peso è F = −mgzˆ
r
L’accelerazione del sistema sarà a0 = − gzˆ e la forza apparente dovuta al moto del sistema sarà
r
r
F0 = −ma0 = mgzˆ
r r
r
r
Applicando il secondo principio per i sistemi non inerziali F + F0 = ma avremo − mgzˆ + mgzˆ = ma = 0 quindi
r
m
qualsiasi corpo di qualsiasi massa nel sistema dell’ascensore in caduta libera avrà a = 0 2 e quindi risponde al
s
primo principio della dinamica: il corpo è in quiete o in moto rettilineo uniforme.
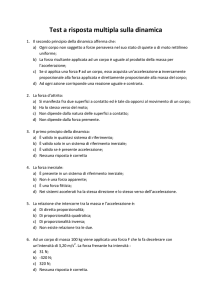
Accelerometro
Considero una massa m attaccata ad una molla di costante elastica K e
r
r
tale per cui la forza esercitata sulla massa sia F = − Kx e il tutto è
disposto orizzontalmente.
Se il sistema in cui si trova la molla accelera lungo l’orizzontale
r r
r
r
r
r
avremo che la relazione F + F0 = ma diventa − Kx − ma0 = ma , ma se
il sistema molla+massa è fermo nel sistema non inerziale, si ha
r
r
r
K r
− Kx − ma0 = 0 da cui a0 = − x quindi l’allungamento della molla
m
consente la misura dell’accelerazione del sistema; con queste modalità
funzionano gli accelerometri, strumenti per la misura delle accelerazioni.
Nella realizzazione pratica degli accelerometri oggi si predilige l’uso di
dispositivi elettronici che correlano l’accelerazione del sistema con la variazione di grandezze elettriche.
Gli accelerometro trovano applicazione nel controllo attivo delle sospensioni e della trazione sulle automobili,
nelle sonde spaziali, nel controllo di protesi ortopediche.
Forze centrifughe
r
Un sistema di riferimento ancorato ad un corpo in rotazione subisce un accelerazione centripeta a0 diretta
dall’origine del sistema non inerziale verso l’asse di rotazione e avendo indicato con r̂ il versore che individua
r
v2
il raggio orientato dall’asse di rotazione all’origine del sistema non inerziale avremo a0 = − rˆ = −ω 2 Rrˆ
R
r
r
r
Si avrà quindi la forza la “vera” F = −mω 2 Rrˆ (forza centripeta) e la forza apparente F0 = − ma0 = mω 2 Rrˆ
(forza centrifuga)
r r
r
Per un oggetto fermo nel sistema di riferimento non inerziale varrà la relazione F + F0 = ma = 0
5/7
Nome file k:\scuola\corsi\corso fisica\meccanica\sistemi di riferimento\sistemi di riferimento.doc
Elaborato il 14/05/2004 alle ore 23.00.48, salvato il 14/05/04 8.00
Creato il 09/01/2003 23.39.00
stampato il 14/05/2004 23.00.00
Dimensione file: 48640 byte
Web: http://digilander.iol.it/profzucchini
Astronave in orbita intorno alla Terra
Un tipico esempio di sistema in caduta libera è un’astronave in orbita
attorno alla Terra.
La velocità minima di un’astronave in orbita approssimativamente
circolare intorno alla Terra, chiamata prima velocità cosmica, è
r
Km
v = 7.9
implica un’accelerazione centripeta
s
r
v2
m r
a0 =
= 9.8 2 = g diretta verso il centro della Terra e indicando
RT
s
con r̂ il versore che individua il raggio orientato dal centro della Terra verso l’esterno avremo
r
v2
m r
a0 = − rˆ = −9.8rˆ 2 = g
RT
s
r
r
r
Si avrà quindi F0 = −ma0 = − mg cioè la forza apparente bilancia esattamente la forza peso e quindi si avrà
all’interno dell’astronave l’assenza di peso.
Va sottolineato che l’assenza di gravità sulle astronavi quali lo Space Shuttle non è dovuta alla lontananza dalla
Terra e quindi all’attenuazione della forza di gravità che nel passaggio dal
suolo a circa 500 Km , quota di volo rappresentativa dello Space Shuttle,
si riduce solamente del ≈ 14%
Le accelerazioni nei diversi sistemi di riferimento inerziale e non, sono
legate dalla seguente relazione:
r
r
aI
=
a{
{
accelerazione nel
sistema inerziale
r
a0
{
+
accelerazione nel
sistema non inerziale
accelerazione del
sistema non inerziale
r r
+ 21
ω2×3v
accelerazione
di Coriolis
che nel caso di sistemi rotanti diventa
r r r
r r
r
r
aI
=
a{
+ ω × (ω × r ) + 21
ω
2×3v
{
14243
accelerazione nel
accelerazione nel
sistema inerziale
sistema non inerziale
accelerazione
centripeta
accelerazione
di Coriolis
da cui si ricava
r r r
r r
r
r
aI
− ω × (ω × r ) − 21
ω2×3v =
a{
e
{
14243
accelerazione nel
accelerazione nel
sistema inerziale
accelerazione
centripeta
accelerazione
di Coriolis
sistema rotante
r r
r
dalla F + F0 = ma si ha
r
r r r
r r
F0 = −mω × (ω × r ) − 21
m2
ω
×3v
4
4
14243
forza
centrifuga
forza di
Coriolis
La forza di Coriolis è dovuta al moto accelerato del
sistema e dal movimento nel sistema non inerziale
dell’oggetto considerato.
6/7
Nome file k:\scuola\corsi\corso fisica\meccanica\sistemi di riferimento\sistemi di riferimento.doc
Elaborato il 14/05/2004 alle ore 23.00.48, salvato il 14/05/04 8.00
Creato il 09/01/2003 23.39.00
stampato il 14/05/2004 23.00.00
Dimensione file: 48640 byte
Web: http://digilander.iol.it/profzucchini
Tipica manifestazione della forza di Coriolis è il movimento delle nubi negli emisferi terrestri:
le masse d’aria dovrebbero seguire la direzione perpendicolare alle isobare ma si osserva invece la creazione di
sistemi in rotazione quali l’anticiclone delle Azzorre, le masse d’aria nel nostro emisfero tendono a curvare
verso destra nel loro moto traslatorio e questo genera l’anticiclone.
Altra manifestazione molto comune e direttamente osservabile è il verso del vortice d’acqua nei lavelli.
Pendolo di Foucault
Il pendolo di Foucault è un pendolo di lunghezza elevata utilizzato per
mostrare la rotazione terrestre.
Se posto ai poli la Terra gli “gira” sotto mostrando che il piano di
oscillazione nel sistema inerziale delle stelle non cambia mentre nel
sistema di riferimento non inerziale pare ruotare.
Quando posto a diverse latitudini oscillando si trova a distanze differenti
dall’asse di ritazione vR = ωR cos ϕ ± ωr sin ϕ
∆v = ωr sin ϕ
T0 =
2πr
2π
86400
=
=
ωr sin ϕ ω sin ϕ sin ϕ
per esempio alle nostre latitudini si ha T0 =
86400
= 86400 2 = 122188 s ≈ 34 ore
sin ϕ
7/7