Motori elettrici di diversa struttura e potenza
Tralasciando i motori omopolari, il cui interesse nel settore degli
azionamenti risulta del tutto trascurabile, i motori elettrici possono
venire suddivisi in quattro grandi famiglie:
I motori a collettore sono
caratterizzati dalla presenza del
sistema collettore-spazzole, che
svolge le funzioni di un
convertitore
di
frequenza
(convertitore alternata-continua);
la descrizione della
loro
struttura sarà effettuata in
seguito.
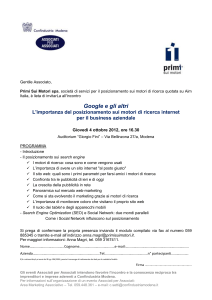
Struttura di un motore in Corrente Continua
Rotore di un motore in Corrente Continua
Nei motori con avvolgimento di eccitazione il campo magnetico
di eccitazione è prodotto da un avvolgimento (avvolgimento di
eccitazione), posto sullo statore della macchina, che può venire
alimentato (con collegamento in serie, in parallelo o composito)
dallo stesso convertitore che alimenta l’avvolgimento collegato al
collettore (avvolgimento di armatura) oppure da un apposito
convertitore (motore ad eccitazione indipendente); nei motori a
magneti permanenti, invece, il campo magnetico è prodotto da
magneti permanenti inseriti nella struttura dello statore.
I motori universali sono dei particolari motori a collettore,
caratterizzati da un avvolgimento eccitazione posto in serie
all’avvolgimento di armatura, che possono venire alimentati sia
in corrente continua che in corrente alternata; il loro impiego è
praticamente limitato a piccoli elettrodomestici o utensili
motorizzati.
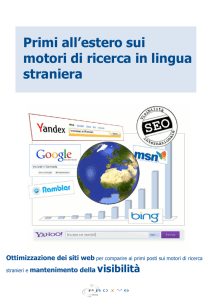
I motori sincroni sono alimentati
con una tensione alternata trifase
e presentano la proprietà di
ruotare ad una velocità rigidamente legata alla frequenza
della tensione di alimentazione.
Come nei motori in corrente
continua, anche nei motori
sincroni il flusso può essere
prodotto da un avvolgimento di
eccitazione o da magneti
permanenti.
Motore sincrono a magneti permanenti
Negli azionamenti di piccola potenza (fino a qualche decina di
kW) vengono essenzialmente impiegati motori a magneti
permanenti, mentre quelli con avvolgimento di eccitazione
trovano impiego solo in applicazioni di elevata potenza
(dell’ordine dei MW).
Negli azionamenti di piccola potenza, infine, oltre ai motori
caratterizzati dalla usuale distribuzione spaziale dell’induzione
di tipo sinusoidale (motori sincroni sinusoidali) vengono anche
impiegati motori sincroni nei quali la distribuzione spaziale
dell’induzione è di tipo trapezoidale (motori sincroni
trapezoidali).
I motori a riluttanza sono caratterizzati da un circuito magnetico
fortemente anisotropo (motore sincrono a riluttanza e motore a
isteresi) oppure da uno statore con un numero di denti diverso da
quello dei denti rotorici (motore a passo e motore commutato a
riluttanza).
Negli azionamenti di piccola potenza (minore di 100 W) per
movimentazione (ad esempio driver per CD e per dischi fissi)
trovano largo impiego in i motori a passo mentre i motori sincroni
a riluttanza e i motori commutati a riluttanza, pur presentando
peculiarità alquanto interessanti, non hanno fino ad oggi trovato
un impiego consistente a causa delle difficoltà costruttive del
motore, nel caso di motori sincroni a riluttanza, o di difficoltà di
controllo del convertitore, nel caso di motori commutati a
riluttanza.
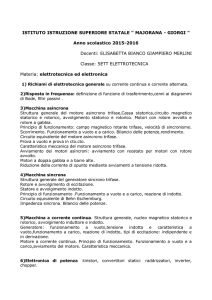
I motori asincroni, detti anche
motori ad induzione, sono
alimentati con una tensione, o
una corrente, alternata ma, a
differenza dei motori sincroni,
la loro velocità di rotazione
dipende, oltre che dalla
frequenza della tensione di
alimentazione, anche dalla
coppia resistente del carico.
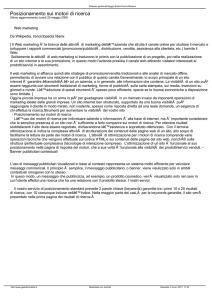
Il circuito elettrico di statore è costituito da un avvolgimento,
monofase o trifase, che, nel caso trifase, risulta identico a quello di un
motore sincrono a distribuzione spaziale sinusoidale. Il circuito di
rotore può essere realizzato mediante un avvolgimento trifase o un
circuito (detto a gabbia di scoiattolo) costituito da barre conduttrici
trasversali cortocircuitate tra loro mediante appositi anelli.
I motori con statore monofase sono in genere di piccola potenza; le
loro limitate possibilità di controllo li rendono difficilmente
impiegabili in azionamenti a velocità variabile dove, invece, trovano
largo impiego i motori asincroni con alimentazione trifase e, in
particolare, quelli con rotore a gabbia.
Motore asincrono a rotore avvolto
Motore asincrono con rotore a gabbia
Rotore a gabbia di scoiattolo
I normali motori asincroni a gabbia presenti sul mercato sono
realizzati per una alimentazione diretta dalla rete di distribuzione;
pertanto, la loro progettazione viene effettuata in modo da limitare
la corrente ed aumentare la coppia durante l’avviamento da rete
(motori a doppia e tripla gabbia o a gabbia profonda).
Negli azionamenti a velocità variabile la condizione
precedentemente menzionata non si verifica mai; è pertanto
conveniente, specialmente quando si desiderano elevate
prestazioni dinamiche e/o elevate velocità massime, ricorrere a
motori appositamente progettati (motori asincroni per inverter).
Si può, infine, osservare che nei motori a magneti permanenti lo
scopo dei magneti è quello di generare, all’interno della macchina,
un campo magnetico (campo magnetico impresso) che, interagendo
con le correnti che circolano nell’avvolgimento di armatura, nel
motore in c.c., o nell’avvolgimento di statore, nel motore sincrono,
produce la coppia motrice; la stessa funzione viene svolta, nei motori
in c.c. ad eccitazione indipendente o nei motori sincroni con
avvolgimento di eccitazione, dall’avvolgimento di eccitazione.
Viceversa il motore asincrono presenta un unico avvolgimento
alimentato (avvolgimento di statore) che serve a produrre sia il
campo magnetico sia la coppia motrice.
Come già accennato nell’introduzione, nel seguito verrà effettuata
una trattazione dei diversi tipi di azionamenti, prendendo in
considerazione solo quelli che presentano il maggior interesse
industriale e, in particolare, quelli che impiegano un:
motore in corrente continua ad eccitazione indipendente;
motore in c.c. a magneti permanenti;
motore sincrono sinusoidale a magneti permanenti;
motore sincrono trapezoidale a magneti permanenti;
motore asincrono trifase a gabbia.