MODELLI ECOLOGICI
Chiara Mocenni
http://www.dii.unisi.it/~mocenni/
giovedì 15 dicembre 11
POPOLAZIONI INTERAGENTI
Le principali tipologie di interazione tra specie sono le
seguenti:
la predazione (una specie ricava un beneficio dall'altra
specie che invece ne ricava un danno);
la competizione interspecifica (entrambe le specie
ricavano un danno dall'interazione);
la simbiosi (entrambe le specie ricavano un beneficio
dall'interazione).
giovedì 15 dicembre 11
MODELLI CONSUMATORERISORSA
Consideriamo le seguenti assunzioni:
In assenza di consumo, la risorsa segue una dinamica dipendente da
densità. Come per i modelli di singola popolazione, come ad esempio
l’equazione logistica, la risorsa non sfruttata tende verso un valore di
regime. Se la risorsa è una popolazione, tale valore di regime non è altro
che la capacità portante; se la risorsa non è una popolazione, come nel
caso di particolato organico o sali nutrienti, tale valore rappresenta la
concentrazione risultante dall'equilibrio tra flussi entranti ed uscenti nel
comparto di questa risorsa.
giovedì 15 dicembre 11
In assenza di risorsa, il consumatore si estingue. Infatti si assume
di considerare solo le risorse essenziali per la dinamica dei
consumatori.
Il trasferimento di risorsa costituisce la sola interazione tra i due
comparti.
giovedì 15 dicembre 11
LA DINAMICA DELLA RISORSA
La dinamica della risorsa risulta composta da una crescita
dipendente da densità (crescita malthusiana o lineare + mortalità)
+
un termine di consumo
giovedì 15 dicembre 11
LA DINAMICA DEL
CONSUMATORE
La dinamica del consumatore risulta composta da una crescita
dipendente dalla disponibilità della risorsa
+
un termine di mortalità naturale.
giovedì 15 dicembre 11
LE EQUAZIONI
dove:
x = biomassa della risorsa;
y = biomassa del consumatore;
φ(x) = crescita della risorsa;
µ = mortalità del consumatore;
p(x) = risposta funzionale del consumatore (predatore).
giovedì 15 dicembre 11
MODELLO LOTKA-VOLTERRA
•
Il modello base di Lotka e Volterra e’ descritto dalle seguenti
equazioni, in cui la crescita della risorsa (o preda) e’ proporzionale alla
biomassa della risorsa stessa e il termine di predazione e’
proporzionale al prodotto delle biomasse della risorsa e del
consumatore.
x = rx − pyx
y = epxy − my
Questo modello presenta un equilibrio marginalmente stabile, con
autovalori complessi coniugati a parte reale nulla, dunque ha una
dinamica di tipo centro.
giovedì 15 dicembre 11
LA RISPOSTA FUNZIONALE DEL CONSUMATORE
La risposta funzionale del consumatore rappresenta il tasso
di consumo della risorsa da parte di una singola unità di
biomassa del consumatore. Essa puo’ essere lineare nella
variabile risorsa, oppure non lineare, nel caso in cui si voglia
ad esempio modellare la limitazione da parte del
consumatore nel consumo della risorsa.
giovedì 15 dicembre 11
LA RISPOSTA FUNZIONALE DI
TIPO I
giovedì 15 dicembre 11
LA RISPOSTA FUNZIONALE DI
TIPO II
giovedì 15 dicembre 11
LA RISPOSTA FUNZIONALE DI
TIPO III
giovedì 15 dicembre 11
IL MODELLO LOTKAVOLTERRA MODIFICATO
E’ una versione estesa del modello Lotka-Volterra (modello
consumatore-risorsa o predatore-preda) con risposta funzionale
lineare.
giovedì 15 dicembre 11
LE NULLCLINES
•
Annullando le derivate
dx/dt e dy/dt si
ottengono le seguenti
nullclines:
giovedì 15 dicembre 11
STUDIO DEL MODELLO
LOTKA-VOLTERRA
giovedì 15 dicembre 11
GLI EQUILIBRI DEL SISTEMA
•
Le soluzioni di equilibrio sono le seguenti :
giovedì 15 dicembre 11
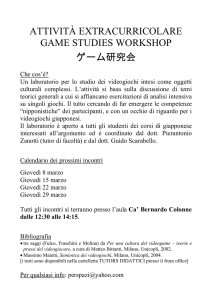
ESISTENZA DELL’EQUILIBRIO C
La situazione mostrata non è sempre possibile. Infatti, essa esiste solo se il
predatore è sufficientemente efficace nell'interagire con la preda: mortalità
da fame contenuta e/o efficienza di conversione della biomassa e
coefficiente di predazione sufficientemente elevati in maniera tale che
(Se non è verificata la condizione il terzo equilibrio non esiste in quanto
assume valori negativi).
giovedì 15 dicembre 11
STABILITA’ DI C
giovedì 15 dicembre 11
LA COMPETIZIONE
INTERSPECIFICA
Avviene quando due specie competono per la stessa risorsa e non
c’è relazione diretta di predazione tra di esse.
In questo modello coesistono 4 equilibri: A(0,0), B(k1,0), C(0,k2),
D(x*,y*). Gli equilibri A e D sono instabili, mentre gli equilibri B e C
sono entrambi stabili. Il sistema tenderà all’uno o all’altro a seconda
della condizione iniziale (x0,y0):
- se x0>y0, allora (x(t),y(t))→B per t→∞;
- se x0<y0, allora (x(t),y(t))→C per t→∞
giovedì 15 dicembre 11
MODELLI ECOLOGICI CHE
PRESENTANO CICLI LIMITE
u⎞
u
⎛
u = ru ⎜ 1 − ⎟ − pv
⎝
K⎠
a+u
u
v = epv
− mv
a+u
che presenta la seguente struttura adimensionale:
u
u = u (1 − u ) − v
a+u
u
v = bv
− gv
a+u
giovedì 15 dicembre 11
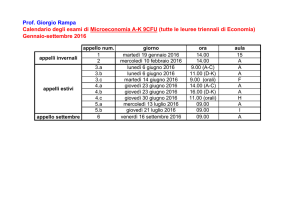
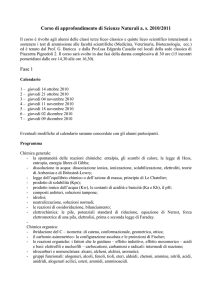
ONDE E
PATTERN DI
TURING
•
Se introduciamo la diffusione
nel modello precedente, si
osserva la formazione di
strutture non omogenee nel
dominio spaziale, descritto
dalle coordinate spaziali x e y.
La formazione delle strutture
dipende dalla destabilizzazione
degli equilibri ad opera del
meccanismo di diffusione delle
specie nello spazio
(biforcazione di Turing).
giovedì 15 dicembre 11
giovedì 15 dicembre 11
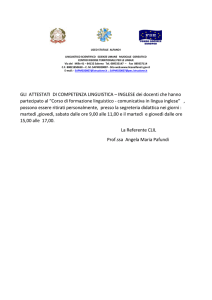
Il modello caotico di Hastings–Powell
giovedì 15 dicembre 11