Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
CINEMATICA APPLICATA
Indice
Cinematica del punto materiale
• Definizioni
• Tipologie di moto
• Strumenti matematici
• Applicazioni
Cinematica del corpo rigido
• Definizioni
• Centro di istantanea rotazione
• Formula fondamentale della cinematica
• Rotazione del corpo rigido
Cinematica dei meccanismi
• Coppie cinematiche
• Gradi di libertà
• Analisi cinematica
1
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
CINEMATICA DEI MECCANISMI
DEFINIZIONI
MEMBRO: elemento di macchina in movimento rispetto agli altri e ad essi connesso tramite coppie cinematiche
TELAIO: membro fisso rispetto a un riferimento assoluto
Cinematica dei meccanismi
2
1
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
Membri MOVENTI: membri sui quali agiscono forze esterne che compiono lavoro positivo, detto lavoro motore
Membri CEDENTI: membri sui quali agiscono forze esterne che compiono lavoro negativo, detto lavoro resistente
Motore a combustione interna
movente
cedente
Cinematica dei meccanismi
3
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
ELEMENTO CINEMATICO: parte, superficie, di un membro che è a contatto di una parte di un altro membro
COPPIA CINEMATICA: insieme di due elementi cinematici Sistema di due corpi rigidi che si muovono di moto relativo tra loro, con il vincolo che una superficie solidale al primo corpo strisci e/o rotoli costantemente durante il moto su una superficie solidale al secondo.
Cinematica dei meccanismi
4
2
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
Cinematica dei meccanismi
5
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
COPPIE CINEMATICHE SUPERIORI
contatti lineari o puntiformi (non realizzabili tramite contatti di superficie)
Cinematica dei meccanismi
6
3
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
CATENA CINEMATICA unione di più membri ottenuta con coppie cinematiche, in modo che, fissate le velocità di un numero di membri pari ai gradi di libertà, risultino univocamente determinate le velocità relative di tutti gli altri membri
Cinematica dei meccanismi
7
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
Catena cinematica APERTA se esiste un membro con un solo accoppiamento
Cinematica dei meccanismi
8
4
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
Catena cinematica CHIUSA ogni membro è accoppiato ad ambo le parti.
MECCANISMO
catena cinematica con un membro fisso il membro fisso è detto TELAIO
Cinematica dei meccanismi
9
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
COORDINATE = posizione di punti o corpi rigidi è identificata da spostamenti e/o angoli
Le COORDINATE devono essere sufficienti e indipendenti
COORDINATE GENERALIZZATE = insieme di coordinate sufficienti e indipendenti
Il moto di punti, o corpi rigidi, è rappresentato dalla evoluzione delle coordinate nel dominio del tempo
Cinematica dei meccanismi
10
5
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
GRADI DI LIBERTÀ DI CATENE CINEMATICHE E MECCANISMI
EQUAZIONE DI STRUTTURA
Catena cinematica nello spazio 3D
N = 6 m ‐ 5c1 ‐ 4c2 ‐ 3c3 ‐ 2c4 ‐ c5 = n + 6
N
numero di gradi di libertà della catena cinematica
Meccanismi nello spazio 3D
n = 6(m‐1) ‐ 5c1 ‐ 4c2 ‐ 3c3 ‐ 2c4 ‐ c5
n
numero di gradi di libertà (grado di mobilità) di un meccanismo m membri rigidi, uno dei quali è il telaio
ci
numero delle coppie cinematiche di classe “i” presenti nel meccanismo
Cinematica dei meccanismi
11
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
Robot SCARA
4 gradi di libertà
Cinematica dei meccanismi
12
6
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
Robot PUMA
6 gradi di Libertà
Cinematica dei meccanismi
13
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
Meccanismi nel PIANO
Nel piano un corpo libero ha 3 gradi di libertà:
• 2 coordinate di posizione
• 1 coordinata di rotazione
Equazione di Grübler :
n = 3(m‐1) ‐ 2c1 ‐ c2
c1
numero delle coppie cinematiche di classe “1” (rotoidali, prismatiche)
c2
numero delle coppie cinematiche di classe “2” (camme piane)
• se n ≥ 1 si tratta di un meccanismo
• se n = 0 si tratta di una struttura isostatica
• se n < 0 si tratta di una struttura iperstatica
Cinematica dei meccanismi
14
7
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
Esempi di calcolo dei gradi di libertà
Cinematica dei meccanismi
15
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
Esempi di calcolo dei gradi di libertà
Cinematica dei meccanismi
16
8
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
CASI PARTICOLARI
Meccanismo con camma e punteria a rotella
Morsa da banco
Cinematica dei meccanismi
17
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
CASI PARTICOLARI
Ombrello
Giunto di Cardano
Cinematica dei meccanismi
18
9
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
QUADRILATERI ARTICOLATI
Cinematica dei meccanismi
19
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
Applicazioni del QUADRILATERO ARTICOLATO
Cinematica dei meccanismi
20
10
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
CLASSIFICAZIONE DEI QUADRILATERI
Quadrilatero di Grashof: Lmax + Lmin ≤ L3 + L4
regole di Grashof:
‐ il telaio è il più corto: quadrilatero a doppia manovella
‐ la biella è il membro più corto: quadrilatero a doppio bilanciere
‐ una delle due aste collegate al telaio è il membro più corto
quadrilatero manovella ‐bilanciere (l’asta più corta è la manovella)
Quadrilatero NON di Grashof: Lmax + Lmin > L3 + L4
Quadrilatero è sempre a doppio bilanciere.
Cinematica dei meccanismi
21
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
Cinematica dei meccanismi
22
11
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
Cinematica dei meccanismi
23
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
Applicazioni del QUADRILATERO ARTICOLATO
Azionamento del tergicristallo
Cinematica dei meccanismi
24
12
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
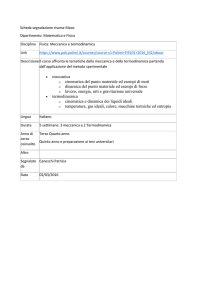
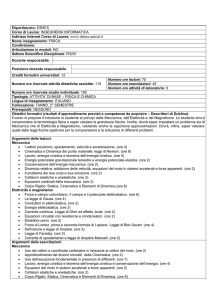
Applicazioni del QUADRILATERO ARTICOLATO
Azionamento del tergicristallo
Rotazione del cedente‐bilanciere
Azione di tergitura
Cinematica dei meccanismi
25
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
40
2
[deg]
4
angolo biella
30
2
20
0
10
0
-2
0
50
100
150
200
250
300
-4
350
q [deg]
50
100
150
200
250
300
350
10
angolo cedente-bilanciere
3
150
[deg]
[rad/s]
100
velocità angolare cedente-bilanciere
5
0
50
0
0
q [deg]
200
3
velocità angolare biella
2
[rad/s]
-5
0
50
100
150
200
250
300
-10
350
q [deg]
Angoli rotazione
0
50
100
150
200
250
300
350
q [deg]
30
2
accelerazione angolare biella
20
Velocità angolari
[rad/s2] 10
0
-10
-20
-30
0
50
100
150
200
250
300
350
q [deg]
100
3
accelerazione angolare cedente-bilanciere
50
[rad/s2]
0
-50
-100
0
50
100
150
200
250
300
350
Accelerazioni angolari
q [deg]
Cinematica dei meccanismi
26
13
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
Applicazioni del PARALLELOGRAMMA ARTICOLATO
Giostre
Cinematica dei meccanismi
27
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
Applicazioni del PENTALATERO
Pantografo
Cinematica dei meccanismi
28
14
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
Applicazioni MANOVELLISMO DI SPINTA CENTRATO
Motore a C.I.
Compressore alternativo
Cinematica dei meccanismi
29
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
Applicazione
MANOVELLISMO DI SPINTA CENTRATO
Pressa
Seghetto alternativo
Cinematica dei meccanismi
30
15
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
Applicazione
MANOVELLISMO DI SPINTA CENTRATO
Moto del pattino
Espressione esatta
xC r cos( t ) L 1
r 2 sin2 ( t )
L2
Espressione semplificata
1 r 2 sin2 ( t )
xC r cos( t ) L 1
L2
2
Cinematica dei meccanismi
31
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
MECCANISMI PIANI con CAMMA
Cinematica dei meccanismi
32
16
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
MECCANISMI PIANI con CAMMA
Cinematica dei meccanismi
33
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
Definizioni
MECCANISMI PIANI con CAMMA
Legge della ALZATA
(spostamento del cedente)
Cinematica dei meccanismi
34
17
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
Angolo di Pressione
Cinematica dei meccanismi
35
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
Leggi di salita
Cinematica dei meccanismi
36
18
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
Leggi di salita ottimale
Cinematica dei meccanismi
37
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
Applicazione delle camme
Distribuzione di un motore C.I. monocilindrico
Camma POLICENTRICA
Cinematica dei meccanismi
38
19
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
Profilo della camma in coordinate polari
Arco
Raggio
Centro
di curvatura
di curvatura [mm]
[deg]
[deg]
[mm]
xC
yC
iniziale
A
6.7
16.1
0
0
14.9
14.9
B
85.96
-31.517
-63.362
14.9
61.7
46.8
C
61.7
90
28.3
finale
rampa
-
-
D
15
0
0
90
270
180
E
rampa
-
-
270
298.3
28.3
F
85.96
-31.517
63.362
298.3
345.1
46.8
G
6.7
16.1
0
345.1
360
14.9
Cinematica dei meccanismi
39
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
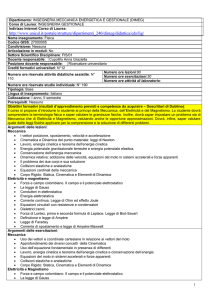
Profilo della camma in coordinate polari
Legge della ALZATA
salita
rampa
Cinematica dei meccanismi
discesa
riposo
rampa
40
20
Università di Padova – PAS – a.a. 2014/15 Classe A020 – Corso: Didattica di Meccanica delle Macchine
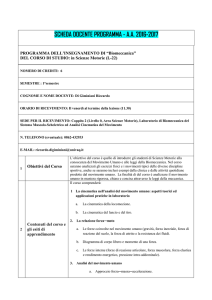
Cinematica del cedente
velocità
0.02
0.01
jerk
s'(q)
0
-0.01
-0.02
0
50
100
150
200
q [deg]
250
300
350
0.15
accelerazione
0.1
s"(q)
0.05
0
-0.05
0
50
100
150
200
q [deg]
Cinematica dei meccanismi
250
300
350
41
21