LEZIONE N. 10
Moto vario nelle correnti a superficie libera
1) Nozione elementare di onda
2) Equazioni del moto vario
3) Propagazione delle piene
Moto vario nelle correnti a superficie libera
Nozione elementare di onda
In termini generali un'onda consiste nella propagazione di un
segnale attraverso un mezzo (nella fattispecie un liquido) con una
certa velocità di propagazione, detta anche celerità. Il segnale (qui
una variazione di quota della superficie libera), può subire, nel
corso della propagazione, variazioni di forma, intensità e celerità.
Le onde possono essere classificate sulla base dei meccanismi
fisici che sottendono i diversi fenomeni di propagazione: si parla
così di onde elastiche, onde acustiche, onde elettromagnetiche,
onde di gravità (nei fluidi), onde di densità (nei fluidi non
omogenei), etc.
Nell’ambito delle onde appartenenti ad una delle classi
menzionate si possono poi distinguere tipologie diverse sulla base
della causa primaria della perturbazione: onde di gravità nei
liquidi sono in particolare le onde di mare (generate dall’azione
del vento sulla superficie libera), le onde di marea (generate
dall’attrazione lunare), le onde di piena nei corsi d’acqua
(generate dagli afflussi provenienti dalle diverse porzioni del
bacino di alimentazione di un corso d’acqua).
Equazioni del moto per onde lunghe
Una classe molto importante di onde nei moti a superficie libera è
quello delle onde lunghe cioè delle cosiddette onde su acqua
bassa, di grande rilievo per la loro applicabilità allo studio delle
onde di piena nei corsi d’acqua, delle onde di marea nonché della
propagazione delle onde di mare sotto costa.
Secondo la trattazione unidimensionale, le variabili dipendenti del
problema, dunque la portata volumetrica Q (o la velocità media
nella sezione U) ed il carico piezometrico h (o l’area della sezione
A o ancora la profondità della corrente Y) risultano ora funzioni di
due variabili: la coordinata longitudinale x ed il tempo t.
Occorre dunque derivare le forme che il principio di
conservazione della massa, cioè l’equazione di continuità, ed il
principio della quantità di moto assumono nel caso di moto non
stazionario.
Equazione di continuità per le correnti non stazionarie.
Consideriamo, dunque, un tronco di corrente a superficie libera di
lunghezza infinitesima dx delimitato da sezioni prossime. Sia dt
l’intervallo temporale nel quale effettuiamo un bilancio di massa
riferito ad un volume di controllo delimitato dalle due sezioni
della corrente considerate, dalla superficie dell’alveo e dalla
superficie libera nella sua configurazione relativa all’istante t
(un’onda si sta propagando nella corrente, l’assetto della
superficie libera va quindi mutando nel tempo in ciascuna
sezione).
Il bilancio di massa relativo al volume di controllo
precedentemente definito e per fluido incomprimibile si formula
immediatamente considerando i seguenti contributi:
- portata massica entrante attraverso la sezione x nell'intervallo
infinitesimo dt:
Qdt
- portata massica uscente attraverso la sezione x+dx
nell'intervallo infinitesimo dt:
Q
Q
dx dt
x
- massa liquida immagazzinata (o sottratta) nel volume di
controllo nell'intervallo infinitesimo dt per effetto
dell'innalzamento (o abbassamento) della superficie libera:
Adx
dt
t
Sommando tali contributi si ottiene:
Q
Adx
Qdt Q
dx dt -
dt = 0
x
t
e quindi:
Q A
dxdt 0
x t
e data l'arbitrarietà delle grandezze dx e dt, si ottiene la
formulazione dell'equazione di continuità per i moti non
stazionari:
Q A
0
x t
(1)
L'equazione di continuità traduce matematicamente il principio
per il quale in un moto non stazionario un aumento della portata
volumetrica nella direzione x deve essere bilanciato da un
abbassamento del pelo libero nel tempo e viceversa.
Equazione del moto
L’equazione del moto delle correnti non stazionarie si può
derivare applicando il principio della quantità di moto al volume
di controllo considerato in precedenza (equazione di de Saint
Venant (1871)).
H
1 V 0
x
g t R
dp
V2
con H z
, R il raggio idraulico (R=A/P) e 0 lo
2g
sforzo tangenziale alla parete (0/R=J). Introducendo il carico
piezometrico h z
dp
, e ricordando che è poco diverso
dall'unità, si ottiene:
h V V 1 V
J
x g s g t
Per la valutazione della cadente si utilizzano ancora le formule
valide in moto uniforme in modo però da evidenziare il segno del
vettore velocità:
J
V V
2gD
Se la pendenza del fondo è abbastanza piccola da poter confondere
la tangente con il seno dell'angolo, si può porre:
dz
i tan sin
dx
Nel caso di alveo rettangolare, essendo il carico piezometrico
dp
h z =z+Y, l'equazione del moto diventa:
Y V V 1 V
iJ
x g x g t
(2)
Il sistema completo delle equazioni di continuità e del moto è
dunque:
Q A
0
x t
Y V V 1 V
iJ
x g x g t
Metodo delle caratteristiche
Il sistema delle equazioni alle derivate parziali in s e t si può
trasformare in un sistema alle derivate totali rispetto ad una sola
variabile (t) utilizzando il legame tra s e t rappresentato da una
coppia di equazioni differenziali ordinarie che definiscono due
famiglie di curve dette caratteristiche.
Le linee caratteristiche sono linee di discontinuità del problema
differenziale. Dal punto di vista fisico rappresentano il percorso
seguito dalle perturbazioni.
Per la rappresentazione lungo le linee caratteristiche è più
conveniente scegliere come variabili dipendenti Y e V, e quindi
modificare l'equazione di continuità, nell'ipotesi di alveo
prismatico (dA=BdY, dB=0):
V
Y A V Y
0
x B x t
Anche nel caso di moto vario a superficie libera il sistema delle
equazioni del moto e di continuità è di tipo iperbolico e può essere
trasformato in un problema differenziale ordinario lungo le linee
caratteristiche.
Una combinazione lineare delle equazioni porge:
V
V
Y
Y A V
Y
V
g
V
g(i J)
t
x
x
t
x
B
x
riordinando i termini:
V
A V
g Y
Y
V
V g (i J )
t
B x
x
t
con l valore arbitrario. Affinché l'equazione possa trasformarsi in
un problema differenziale ordinario occorre che:
V
A
g dx
V
B
dt
ovvero che:
gB
g
A
c
e
dx
Vc
dt
Le equazioni del moto vario dunque si trasformano:
dV g dY
g(i J)
dt c dt
(3)
valendo il segno + lungo la linea caratteristica positiva dx/dt=V+c
e il segno - lungo quella negativa dx/dt=V-c.
Occorrerà poi specificare le condizioni iniziali e al contorno.
Differenza tra correnti lente e veloci.
Propagazione delle onde di piena
Nell’ambito della presente trattazione elementare considereremo
una forma approssimata dell'equazione del moto, fondata su
un’ipotesi che si avvale del carattere lentamente variabile nello
spazio e nel tempo tipico delle onde di piena dei corsi d’acqua.
Tale caratteristica suggerisce la possibilità di trattare il moto come
una successione lentamente variabile nello spazio e nel tempo di
moti uniformi con le caratteristiche istantanee e locali. In altre
parole si assume che portata e area della sezione siano legate in
ogni sezione ed in ogni istante dal legame caratteristico del moto
uniforme.
Tale schema equivale a due sostanziali approssimazioni:
- da una parte viene trascurata l’inerzia della massa fluida
(accelerazione locale e convettiva); => modello parabolico
- dall’altra si trascura il non parallelismo fra superficie libera e
fondo, si confonde cioè la pendenza motrice con la pendenza del
fondo, cosicché l'equazione del moto si traduce in un bilancio tra
effetti gravitazionali associati alla pendenza del fondo e azioni
tangenziali sul perimetro bagnato. => modello cinematico
Il modello dell'onda cinematica
Ne consegue, con tali ipotesi, la possibilità di sostituire
l’equazione completa del moto, cioè l’equazione di de Saint
Venant, con la scala di deflusso (tipica del moto uniforme):
Q kA m
(4)
Malgrado i limiti di tale schema, esso si rivela molto utile perché
consente una trattazione elementare del fenomeno della
propagazione delle onde di piena.
Sia assegnato l’andamento della variazione nel tempo dell’area
della sezione (o della portata volumetrica) del corso d’acqua in
una sezione iniziale in cui collochiamo l’origine della coordinata
spaziale x (per esempio, in corrispondenza di una sezione in cui è
localizzato un idrometrografo).
Il problema della propagazione consiste nella ricerca della
funzione A(x, t) (o Q(x, t)) in ogni sezione x localizzata a valle
della sezione iniziale ed in ogni istante t successivo all’istante
iniziale . Utilizziamo allora la scala di deflusso e assumiamo
l’alveo cilindrico: il carattere cilindrico dell’alveo implica che la
scala deflusso non cambi al variare della coordinata spaziale x,
cioè le quantità m e k possono trattarsi come costanti.
La scala di deflusso istituisce una relazione biunivoca fra area
della sezione e portata volumetrica, che può essere interpretata
come una funzione composta della forma:
Q Q[A( x, t )]
(5)
La portata dipende dunque dalla coordinata spaziale x e dal tempo
t solo implicitamente attraverso la sua dipendenza dall’area della
sezione. Ne consegue che:
Q dQ A
x dA x
e ricordando la scala di deflusso:
(6)
dQ
mQ
mkA m 1
dA
A
(7)
Sostituendo le (6) e (7) nell'equazione di continuità si ottiene
infine la cosiddetta equazione dell’onda cinematica:
A
A
c(A)
0
t
x
(8)
dove c(A) rappresenta la quantità:
c(A)
dQ
mQ
mkA m 1
dA
A
(9)
c rappresenta la celerità con cui l'onda si propaga.
Il caso delle onde di piccola ampiezza
Le onde di piena nei corsi d’acqua non sono quasi mai ‘onde di
piccola ampiezza ’: la superficie libera subisce infatti oscillazioni
confrontabili o addirittura superiori alla profondità iniziale della
corrente.
E’ tuttavia di qualche utilità considerare un caso particolare,
ancorché poco realistico se riferito alle onde di piena: quello in cui
le oscillazioni di livello sono piccole rispetto alla profondità
iniziale.
In questo caso, trascurando l’effetto delle variazioni di area A
sulla valutazione della quantità c, è lecito assumere:
c c0 cos t
(10)
In tal caso l'equazione dell'onda cinematica assume una forma
molto semplice:
A f ( x c0 t )
(11)
con f funzione arbitraria. In altre parole, qualsiasi funzione
cosiddetta propagatoria, cioè del tipo (11) soddisfa l'equazione del
modello cinematico. La soluzione andrà poi scelta dunque in
modo da soddisfare le condizioni iniziali.
Deve risultare dunque:
f ( x c0 t ) x 0 A 0 ()
(12)
In conclusione la soluzione si scrive:
A A0 ( x c0 t )
(13)
La (11) descrive un’oscillazione del pelo libero identica a quella
che si realizza nella sezione iniziale traslata nel tempo: più
precisamente, nella sezione x si realizza all’istante ( + x/c0) lo
stesso valore di A che, nella sezione iniziale si realizza all’istante
.
Reciprocamente, la (13) descrive un profilo iniziale A0(x) che,
all’istante generico t, è traslato verso valle di una distanza c0 t
mantenendo inalterata la sua forma. Dunque:
un’onda di piccola ampiezza si propaga con celerità c0 costante
senza subire variazioni di ampiezza (non si attenua né si
amplifica) o di forma (non si irripidisce)
Il caso delle onde di grande ampiezza
L’equazione dell’onda cinematica, nella sua forma generale è
un’equazione differenziale non lineare poiché contiene termini (il
secondo a primo membro) in cui compaiono prodotti fra la
funzione incognita e se stessa o le sue derivate. Tale equazione,
ancorché assai semplice, contiene molti degli ingredienti tipici
delle onde non lineari e si incontra in numerosi campi
dell’Ingegneria.
La soluzione della (8) si ottiene immediatamente osservando che
lungo ciascuna curva del piano orario (x, t) su cui vige la
condizione:
dx
(14)
c( A )
dt
l'equazione (8) diventa:
A A dx dA
0
t x dt dt
(15 )
In altre parole la derivata totale della funzione incognita rispetto al
tempo è nulla per un osservatore che si muove lungo una curva del
piano orario definita dalla (12), ovvero lungo una cosiddetta curva
caratteristica. Su ciascuna di tali curve, dunque, l’area della
sezione A (e, quindi, la portata Q) si mantiene costante. Ma se si
verifica tale condizione anche c, cioè la celerità, risulta costante,
dunque le curve caratteristiche sono in realtà rette caratterizzate
dalla pendenza costante c(A).
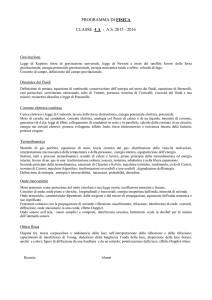
Ciò suggerisce un procedimento grafico per la costruzione della
soluzione. Si considera il piano orario (x, t) e si rappresenta lungo
l’asse delle ordinate l’andamento della funzione A0() che
identifica l’idrogramma iniziale. Da ciascun punto dell’asse delle
ordinate (cioè a ciascun istante iniziale ) è quindi possibile far
partire una retta di pendenza costante 1/ c(A0()). Su ciascuna di
tali rette il valore di A si mantiene costante e pari ad A0(). Tale
condizione consente di costruire l’idrogramma in ogni sezione x
semplicemente traslando i valori iniziali di A lungo ciascuna curva
caratteristica.
La costruzione grafica illustrata nella figura mostra che:
- nella fase crescente della piena, la celerità cresce e la pendenza
delle linee caratteristiche diminuisce, sicché esse convergono:
l’effetto della convergenza è un irripidimento del fronte
dell’onda;
- nella fase decrescente della piena, la celerità cresce e la
pendenza delle linee caratteristiche cresce, sicché esse
divergono: l’effetto della divergenza è un appiattimento della
coda dell’onda.
Il modello dell’onda parabolica
Le equazioni alla base del modello dell’onda parabolica sono:
Q
h
B 0
x
t
h
iJ
x
(16)
Supponiamo che la larghezza superficiale B si possa ritenere
costante e deriviamo l’equazione di continuità rispetto a x e quella
del moto rispetto a t.
2Q
2h
B
0
2
xt
x
2h
J
xt
t
Eliminando la derivata mista l’equazione di continuità diventa:
1 2Q J
2
B x
t
(17)
La cadente J è funzione della portata e del tirante, ovvero:
J J Q J h
t Q t h t
che, sostituendo l’espressione di h / t fornita dall’equazione di
continuità, cioè:
h
1 Q
t
B x
diventa:
J
J J Q 1 J Q J Q 1 h Q
t Q t B h x Q t B J x
Q
Sostituendo nell’equazione di continuità
1 2Q J
B x 2 t
quest’ultima diventa:
J
1 Q Q 1 h Q
J x 2 t B J x
B
Q
Q
2
(18)
Questa si può riscrivere nella forma:
D
2Q
x
2
Q
Q
c
t
x
(19)
avendo posto:
J
1
1
D
, e c h , funzioni di h e Q.
J
B J
B
Q
Q
La quantità c rappresenta la celerità dell’onda cinematica. Infatti
l’espressione di J / t si può riscrivere nella forma:
J J Q
Q
c
t Q t
x
che nel caso di onda cinematica, per cui è J=i e quindi
indipendente dal tempo, diventa:
Q
Q
c
0
t
x
Ricordando ora che è
dQ Q
Q
c
dt
t
x
dall’equazione del modello parabolico si ricava che un osservatore
che scende lungo il corso d’acqua con velocità c, vede variare la
portata secondo la legge:
dQ
2Q
D 2
dt
x
Nell’intorno del massimo spaziale della portata la derivata
2Q / x 2 è minore di zero. Pertanto l’osservatore che scende
lungo il corso d’acqua con celerità c osserva una diminuzione
della portata nell’intorno del colmo. => L’onda si appiattisce.
(come nella propagazione reale).
Esprimendo la cadente J mediante la formula di Chezy, valida nel
moto uniforme, dall’equazione del moto semplificata adottata dal
modello parabolico si ottiene:
Q CA RJ CA R i h / x Q0 1
h / x
i
Il legame tra le portate e le altezze d’acqua durante il moto vario
non è più biunivoco, come nel modello cinematica. In particolare
la portata che corrisponde all’altezza d’acqua h in una data sezione
è uguale a quella fornita dalla formula di moto uniforme solo se la
sezione è quella in cui l’altezza d’acqua raggiunge, nell’istante
considerato il massimo valore nello spazio ( h / x 0 ).
Nelle sezioni più a valle del massimo spaziale del tirante =>
h / x 0 => Q Q0 ;
Nelle sezioni più a monte => h / x 0 => Q Q0 .
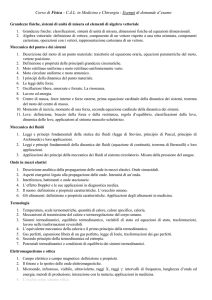
Segue quindi che la sezione in cui si osserva il massimo spaziale
della portata ( Q / x 0 ) si trova più a valle di quella in cui si
osserva il massimo del tirante ( h / x 0 ).
Dall’equazione di continuità:
Q
h
B 0
x
t
segue poi che nella sezione dove si verifica il massimo spaziale
della portata ( Q / x 0 ) si verifica anche il massimo temporale
del tirante ( h / t 0 ).
Consideriamo ora la sezione in cui la portata assume il massimo
valore nel tempo ( Q / t 0 ). Dall’equazione del modello
parabolico segue che
D 2Q Q
2
c x
x
E’ logico supporre che questa sezione si trovi in un intorno del
massimo di portata nello spazio, in corrispondenza del quale
2Q / x 2 <0. Essendo D e c entrambi positivi, segue che nella
sezione dove si raggiunge il massimo temporale della portata,
Q / x 0 . => La sezione in cui si presenta il massimo temporale
della portata si trova a valle di quella in cui la portata assume il
massimo valore nello spazio.
Fig. 7.4
Da monte verso valle si incontrano quindi successivamente:
- il massimo livello nello spazio
- la massima portata nello spazio (massimo livello nel tempo)
- la massima portata nel tempo.
Nella generica sezione si susseguono:
- la massima portata tra tutte quelle osservate nella sezione
- il
livello
massimo
tra
tutti
quelli
osservati
(contemporaneamente la portata è la massima tra tutte quelle
osservabili lungo tutto il corso d’acqua => ciò è possibile
perché l’onda si lamina)
- il massimo livello nello spazio. In questo istante la portata è
quella corrispondente all’altezza di moto uniforme.
Massimo locale: valore di una particolare grandezza
cinematica (profondità, portata, velocità) che si verifica in
una sezione fissata quando si annulla la derivata temporale
della stessa grandezza.
Colmo: valore di una particolare grandezza cinematica
(profondità, portata, velocità) che si verifica ad un istante
fissato nella sezione in cui si annulla la derivata spaziale della
stessa grandezza.
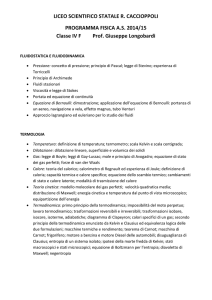
L’andamento delle portate in funzione dei tiranti può essere
confrontato con quello tipico del moto uniforme.
Cappio di piena
1. Massimo locale di velocità ( V / t 0 ). Si costruisce
graficamente cercando la linea a velocità costante che risulta
tangente alla curva che rappresenta la scala di deflusso della piena:
tale linea è identificata dalla condizione Q/A(Y ) = costante.
2. Massimo locale di portata ( Q / t 0 ).
3. Massimo locale di profondità ( Y / t 0 ) che coincide, per
l’equazione di continuità, con il colmo della portata ( Q / x 0 ).
4. Colmo della profondità ( Y / x 0 ): si può dimostrare che
tale colmo si realizza in prossimità dell’istante corrispondente
all’intersezione fra scala di deflusso di moto uniforme e scala di
deflusso della piena.
Equazione dei serbatoi
Uno degli effetti principali dei serbatoi, siano o meno progettati
per questo esclusivo scopo, è quello di laminazione delle onde di
piena, cioè l'attenuazione delle portate di piena al colmo, per
effetto dell'invaso di parte del volume di piena e della sua
restituzione al corso d'acqua in un tempo successivo.
I fenomeni di moto vario all'interno dei serbatoi possono essere
studiati prescindendo dagli aspetti propagatori (essendo
trascurabili le velocità e quindi i termini inerziali e le resistenze).
L'unica equazione significativa è l'equazione di continuità, che si
può scrivere:
dV
Qe Q u
dt
essendo V il volume all'interno del serbatoio, Qe e Qu
rispettivamente le portate entranti e uscenti. L'unica variabile
indipendente è il tempo.
La portata entrante è descritta in genere tramite un idrogramma,
ricavabile sulla base delle piogge sul bacino (metodo delle fasce
isocorrive o dell'idrogramma unitario).
La portata uscente è legata alla quota in funzione del tipo di luce
di efflusso dal serbatoio.
Se la luce è a battente (scarico di fondo) la portata è legata alla
radice quadrata del carico sulla luce:
Qu f A 2gh h f
A è l'area della luce e hf la quota del baricentro della luce. Il
coefficiente di efflusso f tiene conto dell'eventuale contrazione e
di tutte le perdite concentrate e distribuite.
Nel caso di luce a stramazzo (scarico di superficie) la portata è
legata al carico sulla soglia dalla legge:
Q u s L 2g h h s 3 / 2
dove L è la larghezza della luce e hs è la quota della soglia. Il
coefficiente di efflusso s dipende dalla conformazione della
soglia oltre che dal carico.
Nel caso che l'efflusso avvenga da entrambe le luci, la portata
uscente è data dalla somma dei due contributi.
Il volume del serbatoio è legato alla quota del pelo libero
attraverso la cosiddetta curva dei volumi, che può essere espressa
mediante una funzione monomia del tipo:
V ah n
con a e n coefficienti ricavabili tramite interpolazione.
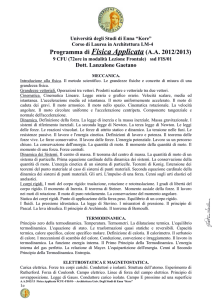
Crollo di diga
Si integrano le equazioni del moto vario a superficie libera nelle
ipotesi che:
- la corrente sia unidimensionale, cioè la vallata si sviluppi
prevalentemente in direzione longitudinale;
- la pendenza sia uniforme;
- la distribuzione delle pressioni sia idrostatica;
- la componente verticale della velocità sia nulla.
Il problema si affronta ipotizzando la rimozione istantanea della
diga. Tale ipotesi consente di prescindere dalle modalità di rottura
della diga. (non sono simulati bene i crolli parziali). In laboratorio
si simula rimuovendo velocemente una paratoia che sbarra la zona
con acqua ferma.
Le resistenze possono essere calcolate in prima approssimazione
con le formule valevoli per il moto uniforme, anche se queste non
sono tanto attendibili nei transitori rapidi.
Le condizioni iniziali sono quelle di acqua ferma a monte della
diga e alveo secco a valle. A volte si considera una portata minima
a valle (deflusso minimo vitale).
L'immediata rimozione della diga provoca un'onda positiva che si
propaga a valle e un'onda negativa che si propaga a monte.
La soluzione analitica esiste solo nel caso di alveo rettangolare
con pendenza nulla e resistenze trascurabili. (Può servire per
verificare eventuali modelli più complessi).
In tal caso si ottiene:
2
x
Y Y0
3 3t gY0
2 x
V gY0
3 t
Y Y0
V0
Y0
V0
2
per gY0
per
x
2 gY0
t
x
gY0
t
per 2 gY0
x
t