Meccanica
8. Statica
http://campus.cib.unibo.it/2425/
Domenico Galli
Dipartimento di Fisica e Astronomia
22 febbraio 2017
Traccia
1. Statica
2. Forze
3. Forza Peso
4. Forza Elastica
5. Equazioni Cardinali della Statica
6. Forze Vncolari
7. Forze di Attrito
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
2
Statica
Cinematica: descrizione del moto, a prescindere dalle cause che
modificano lo stato di moto (forze).
Equilibrio: si ha quando un corpo soggetto a forze, inizialmente in
quiete rispetto a un prestabilito SdR, rimane nello stato di quiete:
In uno stato di equilibrio le forze non modificano lo stato di moto.
Statica: studio delle forze (che sono causa dei cambiamenti dello
stato di moto) nelle configurazioni di equilibrio.
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
3
Forza
Concetto di forza: nasce dallo “sforzo” muscolare.
Definizione operativa (specificazione del procedimento con cui si
effettua la misura): cordicella + dinamometro.
La retta su cui si dispone la cordicella rappresenta la direzione della
forza, il dinamometro ne misura il modulo.
Il dinamometro è costituito da una molla a forma di elica cilindrica e da
una scala graduata che consente di misurarne l’allungamento.
I
I
Cordicella ideale: infinitamente sottile, perfettamente flessibile e inestensibile.
Molla ideale: massa nulla, segue precisamente la legge di Hooke:
→
~ = −k −
F
∆l
→
~ è la forza, −
dove F
∆l è l’allungamento e k è una costante (detta costante
elastica).
dinamometro
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
4
Natura Vettoriale delle Forze
Si trova sperimentalmente che le forze si sommano vettorialmente.
Per 3 forze applicate a un punto materiale si ha l’equilibrio se:
Ä
F~3 = − F~1 + F~2
Meccanica – 8. Statica
Statica
Forze
Forza Peso
ä
⇒
F~1 + F~2 + F~3 = ~0
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
5
Unità di Misura della Forza
Nel Sistema Internazionale la forza si misura in Newton (simbolo N).
1 N ≈ 0.101972 kgf
dove kgf è il chilogrammo-forza del deprecato Sistema Tecnico.
Definiremo il Newton successivamente, dopo avere affrontato il
Secondo Principio della Dinamica.
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
6
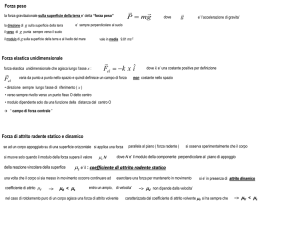
Forza Peso
La forza peso F~p agisce su tutti i corpi che si trovano in prossimità della
superficie terrestre.
Dovuta all’attrazione gravitazionale della Terra sui corpi;
Ha direzione orientata che punta approssimativamente verso il
centro della Terra;
Ha modulo costante con ottima approssimazione:
Il modulo diminuisce lievemente con l’altezza sul livello del mare:
I
Salendo di 1000 m un corpo di peso 1 N riduce il peso di circa 0.0003 N.
La forza peso che agisce su di un corpo omogeneo dipende dal
volume V del corpo e dal suo peso specifico ps :
~ Fp = V ps
dove il peso specifico ps dipende dal materiale di cui
è costituito il corpo.
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
7
Centro di Gravità o Baricentro
Corpo rigido: si può idealmente suddividerlo in n parti sufficientemente piccole rispetto al contesto considerato, da poter essere
considerate puntiformi.
Ogni parte i del corpo rigido, i = 1, . . . , n, è soggetta
alla forza peso: F~1 , . . . , F~n .
Se il corpo non è troppo esteso (rispetto alla dimensione della Terra) tali forze sono parallele tra loro.
L’insieme delle forze peso è riducibile a una sola forza,
~ detta peso totale del corpo, applicata
la risultante R,
nel centro dei vettori paralleli, che in questo caso prende
il nome di Centro di Gravità (o Baricentro) G.
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
8
Centro di Gravità o Baricentro (II)
Il Centro di Gravità (essendo il centro dei vettori paralleli
delle forze peso) è definito dalla relazione:
n 1 X
~ rOPi ,
~rOG = Fi ~
~
R i=1
~=
R
n
X
F~i
i=1
Scelta una terna ortogonale di riferimento con l’origine
nel centro di riduzione O, posto:
(
~rOPi = xi ı̂ + yi ̂ + zi k̂
~rOG = xG ı̂ + yG ̂ + zG k̂
possiamo anche scrivere, nella base cartesiana:
xG =
n 1 X
~ Fi xi ,
~
kRk
yG =
i=1
Meccanica – 8. Statica
Statica
Forze
Forza Peso
n 1 X
~ Fi yi ,
~
kRk
zG =
i=1
n 1 X
~ Fi zi
~
kRk
i=1
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
9
Centro di Gravità o Baricentro (III)
Per un sistema costituito da 2 soli punti materiali, il centro di gravità
si trova sul segmento che congiunge i 2 punti, a distanza da essi
inversamente proporzionale al loro peso.
Per un sistema di n punti materiali che giacciono su di una retta, il
centro di gravità si trova sulla medesima retta.
Per un sistema di n punti materiali che giacciono su di un piano, il
centro di gravità si trova sul medesimo piano.
Se un sistema può essere diviso in più parti, il suo centro di gravità
coincide col centro di gravità dei centri di gravità parziali.
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
10
Centro di Gravità o Baricentro (IV)
Per un corpo omogeneo (porzioni di ugual volume hanno ugual peso),
suddividendolo in n parti di ugual volume, sufficientemente piccole
rispetto al contesto considerato, da poter essere considerate puntiformi,
si ha:
F~i = F~ ,
, i = 1, 2, . . . , n
n
n
n
n
X
1 X
1
1X
1 X
~
~
~
k
F
k
x
=
k
F
k
x
=
k
F
k
x
=
xi
x
=
i
i
i
i
G
~
n i=1
nkF~ k i=1
nkF~ k
kRk
i=1
i=1
n
1X
yi
yG =
n i=1
n
1X
zG =
zi
n i=1
n
1X
~rOG =
n
~rOPi
i=1
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
11
Centro di Gravità o Baricentro (V)
Per un corpo omogeneo (porzioni del corpo di ugual volume hanno ugual
peso), detto ps il peso specifico, possiamo anche scrivere kF~i k = Vi ps e
~ = V ps , per cui:
kRk
~rOG =
=
n
n
n
1 X
1 X
ps X
kF~i k ~rOPi =
Vi ps ~rOPi =
Vi ~rOPi =
~
~
~
kRk
kRk
kRk
i=1
i=1
i=1
n
1 X
Vi ~rOPi
V i=1
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
12
Centro di Gravità o Baricentro (VI)
Se si fa tendere n → ∞, la sommatoria è sostituita da un integrale di
volume. Per un corpo omogeneo si ha:
~rOG =
~rOG
n
1 X
~rOPi Vi ,
V i=1
1
=
V
V =
n
X
Vi
i=1
ZZZ
ZZZ
~rOP dV,
C
V =
dV
C
Si noti come si passa da un insieme discreto di punti {Pi , i = 1, . . . , n} a
un insieme continuo {P ; P ∈ C }.
Le espressioni con gli integrali sono più semplici da calcolare nel caso
di vorpi rigidi aventi una forma geometrica regolare:
Parallelepipedi, sfere, cilindri, coni, ecc.
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
13
Centro di Gravità o Baricentro (VII)
Ricordando l’espressione dV = dx dy dz del volume elementare nella
base cartesiana, possiamo scrivere il vettore posizionale del baricentro di
un corpo continuo e omogeneo:
ZZZ
ZZZ
1
~rOG =
~rOP dV,
V =
dV
V
C
C
nella base cartesiana, come:
ZZZ
1
x dx dy dz
xG =
V
C
ZZZ
1
yG =
y dx dy dz ,
V
C
ZZZ
1
zG =
z dx dy dz
V
ZZZ
V =
dx dy dz
C
C
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
14
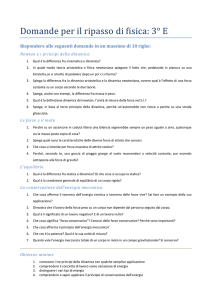
Forza Elastica
I corpi materiali si deformano in seguito alla applicazione di una forza
esterna:
Alcuni corpi, detti corpi elastici, tendono a riprendere la forma
originaria quando la forza esterna cessa di agire.
Altri corpi, detti corpi anelastici rimangono permanentemente
deformati.
La forza interna ai corpi che:
Si oppone alla deformazione dei corpi dovuta a una forza esterna;
Ripristina la forma originale dei corpi quando la forza esterna cessa
di agire;
è detta forza elastica.
Se la deformazione non è troppo ampia, molti corpi elastici mostrano una
relazione di semplice prorporzionalità tra l’intensità della forza elastica
che sviluppano e l’entità della deformazione subita.
In questi casi si dice che la forza elastica è nel regime lineare.
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
15
Forza Elastica (II)
Consideriamo una molla lineare con un estremo ancorato e fisso e l’altro
estremo libero di scorrere senza attrito lungo una certa direzione.
−
→
In assenza di deformazione (∆l = ~0)
la molla non esercita forza (F~ = ~0);
Se la molla subisce una deformazione
(compressione o allungamento) di una
lunghezza ∆l essa esercita una forza:
−
→
F~ = −k ∆l
(legge di Hooke)
dove k è una costante (detta costante
elastica).
Si osservi che la forza F~ ha verso
−
→
opposto alla deformazione ∆l.
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
16
Forze Interne e Forze Esterne
In un sistema di punti materiali si definiscono:
Forze interne: le forze esercitate da una parte del sistema su un’altra
parte dello stesso sistema.
Forze esterne: le forze esercitate su di una parte del sistema da
parte di corpi non appartenenti al sistema.
Es.:
Per il sistema {Terra}, l’attrazione gravitazionale esercitata del Sole
sulla Terra è una forza esterna.
Per il sistema {Terra, Sole} l’attrazione gravitazionale esercitata del
Sole sulla Terra è una forza interna.
N. B.: Ovviamente, la distinzione tra forze
interne e forze esterne non ha senso per
un singolo punto materiale.
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
17
Equazioni Cardinali della Statica
Condizione necessaria e sufficiente per l’equilibrio di un punto
materiale è che si annulli la risultante delle forze ad esso applicate:
~ = ~0
R
N. B.: questo non significa che non siano presenti forze!
Condizione necessaria e sufficiente per l’equilibrio di un corpo rigido
è che si annullino sia la risultante sia il momento risultante delle
forze esterne a esso applicate:
~(e) = ~0,
R
(O)
M~(e) = ~0
(equazioni cardinali della statica)
N. B.: le forze interne di coesione del corpo rigido, che mantengono
invariate le distanze tra i punti, non hanno effetto.
Queste condizioni si ricavano, come caso particolare, dalle equazioni
della dinamica (si veda il seguito del corso).
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
18
Calibrazione di un Dinamometro
Si appende il dinamometro al soffitto e si applica al dinamometro un
numero via via crescente di pesetti tra loro uguali:
Stesso volume e stesso materiale.
Terminata la fase transitoria in cui il sistema oscilla, si raggiunge
l’equilibrio:
Sistema in quiete;
~ = ~0, per cui:
Risulta R
→
~ = F~p + F~e = ~0 ⇒ F~p − k −
R
∆l = ~0
quindi:
Fp
k
Si applicano 1, 2, 3, . . . pesetti e si tracciano le tacche
in corrispondenza dell’indice del dinamometro.
∆l =
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
19
Forze Vincolari
Ogni vincolo impedisce certi movimenti del corpo considerato e ne
consente altri (es.: rotaia treno, cardine porta, piano su cui è
appoggiato un oggetto, ecc.).
Per impedire i movimenti vietati dei corpi, i vincoli debbono esercitare
sui corpi delle forze, dette forze vincolari o reazioni vincolari.
Esempio:
Se un corpo, appoggiato su un tavolo, rimane in quiete, allora la risultante
e il momento risultante delle forze che agiscono su di esso sono entrambi
nulli.
Il corpo è sicuramente soggetto alla forza peso F~p
diretta lungo la verticale verso il basso.
Affinché sia nulla la risultante, deve essere presente
una forza, diretta lungo la verticale verso l’alto.
~ n.
Tale forza è la reazione vincolare R
Per le equazioni cardinali della statica deve essere
~ = F~p + R
~ n = ~0, per cui risulta R
~ n = −F~p .
R
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
20
Forze Vincolari (II)
Le forze non vincolari sono dette forze attive.
Le forze vincolari sono a priori sconosciute, in quanto debbono
adeguarsi alle circostanze per neutralizzare le forze attive che
potrebbero causare movimenti vietati:
Il medesimo tavolo esercita reazioni vincolari diverse su due oggetti di
peso diverso appoggiati su di esso:
~ (1) = −F~ (1)
R
n
p
~ (2) = −F~ (2)
⇒ kF~p(1) k > kF~p(2) k
R
n
p
kF~p(1) k > kF~p(2) k
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
21
Forze Vincolari (III)
~ n finché la
Un vincolo è in grado di esercitare la reazione vincolare R
forza attiva ha modulo inferiore a un valore di soglia denominato carico
di rottura σ.
Il carico di rottura è pari alla massima reazione vincolare che il
vincolo è in grado di esercitare:
n
o
~ σ = max R
n
Se il modulo della forza attiva F~
supera il carico di rottura σ, la
reazione vincolare non è più
esercitata.
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
22
Forze Vincolari (IV)
Possiamo quindi scrivere:
~n =
R
~
−F
se F~ < σ
~0
se F~ > σ
~ n è la reazione vincolare, F~ è la forza attiva e σ è il carico di
dove R
rottura.
~p k < σ
kF
Meccanica – 8. Statica
Statica
Forze
Forza Peso
~p k > σ
kF
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
23
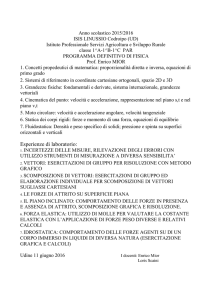
Forze di Attrito
Le forze di attrito sono forze che si sviluppano sulle superfici dei corpi,
tangenzialmente a esse, ostacolandone il movimento.
Attrito interno: si esplica tra i vari strati di un fluido, dovuto alla
viscosità (es.: differente comportamento tra acqua e miele).
Attrito del mezzo: resistenza viscosa (F ∝ v) o resistenza idraulica
(F ∝ v 2 ) a cui è soggetto un corpo in moto entro un fluido viscoso.
Attrito radente: quando due corpi solidi sono sollecitati a strisciare
l’uno sull’altro, sulle superfici di contatto si sviluppano forze tangenziali
dovute alle asperità e alle forze di adesione che si esercitano tra le
due superfici.
Attrito volvente: si osserva in un cilindro che rotola senza strisciare
su di una superficie. Dovuto alle asperità e alla non perfetta elasticità
dei corpi a contatto.
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
24
Attrito Radente
Si manifesta allo strisciare di due corpi l’uno sull’altro.
È causato dalle asperità delle superfici striscianti (per cui le
irregolarità della superficie più dura scavano solchi sulla superficie più
tenera) e dall’adesione tra le due superfici che può produrre delle
vere micro-saldature nei punti di contatto.
Particolarmente intensa è l’adesione tra rame e rame e tra alluminio e
alluminio, che tendono facilmente a “ingranarsi” o “gripparsi”.
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
25
Attrito Radente (II)
Per diminuire l’attrito radente si utilizzano lubrificanti, ovvero
sostanze (olio, grafite, talco, paraffina) che si interpongono tra le due
superfici che strisciano.
Per minimizzare l’attrito, allo scopo di eseguire esperimenti precisi di
dinamica, si utilizza il “cuscino d’aria”, ovvero si interpone uno strato
di aria tra le superfici.
Il ghiaccio secco a temperatura ambiente sublima in anidride
carbonica gassosa che fuoriesce dal foro inferiore creando una
pellicola di aria che si interpone tra il
disco e la superficie su cui esso
appoggia.
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
26
Attrito Radente (III)
La tecnica del “cuscino d’aria” è utilizzata anche in particolari veicoli
anfibi per trasporto passeggeri denominati hovercraft.
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
27
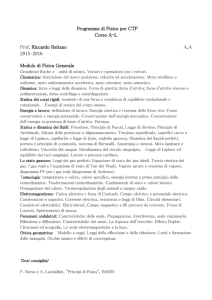
Attrito Radente (IV)
Nello studio dell’attrito radente si distingue tra attrito statico e attrito
dinamico:
Se un corpo pesante appoggia con una faccia su di un piano
orizzontale e sia applica a esso una forza F~ diretta orizzontalmente,
se il modulo della forza kF~ k è sufficientemente piccolo il corpo non si
muove (attrito statico).
Quando invece si aumenta kF~ k oltre una certo valore di soglia, (detto
soglia di primo distacco e qui indicato con θ) il corpo inizia a
muoversi, ma con accelerazione inferiore a quella che avrebbe in
assenza di attrito (attrito dinamico).
Abbiamo quindi:
~
F < θ
~
F > θ
⇒
attrito statico
⇒
attrito dinamico
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
28
Attrito Radente (V)
Si trova sperimentalmente che la soglia di primo distacco θ è
~ n , detta forza di
proporzionale all’intensità della reazione vincolare R
appoggio (che, a sua volta, è opposta alla forza peso F~p ):
~ θ = f R
n
Il coefficiente adimensionale f è detto coefficiente di attrito statico.
Sperimentalmente si trova che f dipende dai materiali di cui sono
composte le superfici e dalla loro scabrosità ed è
approssimativamente indipendente dalla superficie di appoggio.
Abbiamo quindi:
~
F < f
~
F > f
~ Rn ~ Rn Meccanica – 8. Statica
Statica
Forze
Forza Peso
⇒
attrito statico
⇒
attrito dinamico
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
29
Attrito Radente Statico
Se il corpo non si muove (attrito radente statico), significa che esso
si trova in equilibrio, dunque (per le equazioni cardinali della statica)
la risultante delle forze deve essere nulla:
~ = F~ + R
~ (s) = ~0
R
t
se
~ ~
F < f R
n
Questo significa che, se il corpo non si muove, la forza di attrito
radente è sempre opposta alla forza attiva:
~ (s) = −F~
R
t
se
~
~ F < f R
n
Come la reazione vincolare, anche la forza di
attrito radente statico non è nota a priori:
Essa si adegua alla forza attiva:
I
~ non raggiunge
Finché la forza attiva F
~ n k.
l’intensità di soglia θ = f kR
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
30
Attrito Radente Statico (II)
La massima intensità della forza di attrito radente statico si raggiunge
quando kF~ k → θ− . In tal caso risulta:
~ (s) = −F~
R
t
~
F → θ −
~ (s) ~ Rt = F → θ
⇒
Possiamo pertanto scrivere:
lim
~ k→θ−
kF
~ (s) ~ Rt = θ = f R
n
inoltre:
n
o
~ (s) ~ max R
t = θ = f Rn ~ (s) ~ Rt ≤ θ = f R
n
~ n k.
dove vale l’uguaglianza soltanto se kF~ k → θ− = f kR
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
31
Attrito Radente Dinamico
Se kF~ k > θ allora il corpo inizia a muoversi.
In questo caso il corpo non è in equilibrio e la risultante non è nulla:
~ = F~ + R
~ (d) 6= ~0
R
t
se
~ ~
F > θ = f R
n
Si trova sperimentalmente che l’intensità della forza di attrito
radente dinamico vale:
~ ~ (d) Rt = µ R
n
se
~
~ F > θ = f R
n
~ n è la reazione vincolare della superficie (forza d’appoggio),
dove R
opposta alla forza peso F~p . Il coefficiente
adimensionale µ è detto coefficiente di
attrito dinamico.
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
32
Attrito Radente (Sommario)
Concludendo, l’intensità della forza di attrito radente vale:
(s) ~
~
R
=
F t
~ Rt = (d) ~ R
~ t = µ R
n
Attrito
statico
Meccanica – 8. Statica
Statica
Forze
Forza Peso
~ se F~ < θ = f R
n
~ se F~ > θ = f R
n
Attrito
dinamico
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
33
Attrito Radente (Valori Tipici)
f
µ
0.5
0.74
0.1
0.04
1.05-1.35
0.61
1.00
0.7
0.4
0.3
0.57
0.05
0.04
1.4
0.47
0.2-0.6
0.5
0.2
Superfici
Legno-legno
Acciaio-acciaio
Acciaio-acciaio lubrificato
Acciaio-teflon
Alluminio-alluminio
Alluminio-acciaio
Rame-rame
Gomma-asfalto
Gomma-asfalto bagnato
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
34
Attrito Statico e Attrito Dinamico
Evidenze pratiche del fatto che l’attrito dinamico è sempre minore della
soglia di primo distacco θ (valore massimo dell’attrito statico):
Quando si sposta, strisciandolo, un mobile pesante, per metterlo in
movimento (cioè per superare il massimo attrito statico) occorre
imprimergli una forza maggiore di quella necessaria per mantenerlo in
movimento (che serve per equilibrare l’attrito dinamico).
Le automobili recenti sono dotate di un dispositivo anti-patinamento
(ABS). Se la ruota patina, ovvero striscia, sull’asfalto, la forza di
attrito diviene dinamica, e dunque l’azione frenante risulta inferiore. Il
dispositivo ABS, quando la ruota patina rilascia un po’ il freno, in modo
da ripristinare le condizioni di attrito statico.
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
35
Attrito Volvente
Un cilindro che rotola senza strisciare su di un piano è soggetto alla
forza di attrito radente statico che impedisce lo strisciamento.
La forza di attrito radente statico non ostacola il rotolamento del
cilindro.
Il rallentamento del moto di rotolamento (come vedremo in dinamica)
è dovuto a una coppia di forze. Tale coppia è detta coppia di attrito
volvente. Si tratta di forze assolutamente diverse da quelle di attrito
radente statico.
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
36
Attrito Volvente (II)
L’attrito volvente ha origine in un’asimmetria delle forze elastiche
vincolari.
Quando il cilindro rotola su di una superficie, si crea sulla superficie un
avvallamento che procede insieme al cilindro.
Dove si forma l’avvallamento sono presenti forze che si oppongono
alla deformazione.
Dove l’avvallamento scompare sono presenti forze di ripristino.
Se le forze che si oppongono alla deformazione
non sono esattamente uguali alle forze di
ripristino, si ha un’asimmetria che genera
l’attrito volvente.
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
37
Attrito Volvente (III)
L’attrito volvente risulta molto inferiore all’attrito radente (dalle 100
alle 1000 volte).
Per questo motivo, dove si debba minimizzare l’attrito nella rotazione
di un asse, si preferiscono i cuscinetti a rotolamento (come il
cuscinetto a sfere, fig. a destra) ai cuscinetti a strisciamento
(come la bronzina, fig. a sinistra).
Tra le due superfici cilindriche in figura sono poste 9 sfere ingabbiate
che rotolano quando una superficie cilindrica si muove rispetto all’altra.
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
38
Forze di Attrito (Note)
Un corpo che striscia su di una superficie è soggetto alla forza di
attrito radente dinamico.
Un corpo che rotola senza strisciare su di una superficie è soggetto
alla forza di attrito radente statico e alla forza di attrito volvente.
In assenza di attrito radente l’uomo e gli animali non riuscirebbero a
camminare e gli autoveicoli non riuscirebbero a muoversi.
Meccanica – 8. Statica
Statica
Forze
Forza Peso
D. Galli
Forza Elastica
Equazioni Cardinali
Forze Vncolari
Forze di Attrito
39
Domenico Galli
Dipartimento di Fisica e Astronomia
[email protected]
https://www.unibo.it/sitoweb/domenico.galli
https://wiki-lhcb.bo.infn.it/bin/view/GalliDidattica
Meccanica – 8. Statica
D. Galli
40