Università degli Studi di Genova
Facoltà di Ingegneria
TESI DI LAUREA
REALIZZAZIONE DI UN SUPPORTO SENSORIZZATO PER
UN ARTICOLATORE MANDIBOLARE ROBOTICO
Relatore: Prof. GIUSEPPE CASALINO
Allieve: ELIANA LAZZERI
GIOVANNA SICA
Anno Accademico 2004/05
Università degli Studi di Genova
Facoltà di Ingegneria
INDICE
INTRODUZIONE .......................................................... 5
1 OBIETTIVO DEL PROGETTO ............................... 6
2 PROGETTAZIONE DELLE COMPONENTI ........... 8
MECCANICHE ............................................................. 8
2.1 Disegni meccanici ........................................... 8
2.2 Simulazioni ..................................................... 10
3 SENSORIZZAZIONE DEL SUPPORTO ............... 11
3.1 Cella di carico ................................................ 11
3.2 Preparazione della superficie ....................... 12
3.3 Applicazione degli estensimetri ................... 12
3.4 Cablaggio ....................................................... 14
3.5 I circuiti di misura .......................................... 15
4 REALIZZAZIONE DEI CIRCUITI ELETTRICI ...... 20
DIST – GRAAL – Genoa Robotics And Automation Lab
2
Università degli Studi di Genova
Facoltà di Ingegneria
4.1 Montaggio dell’amplificatore ........................ 20
4.2 Caratterizzazione del sensore ...................... 24
5 TEST ..................................................................... 25
5.1 Diagramma e interfaccia ............................... 25
5.2 Macchine seriali e parallele .......................... 29
5.3 Alcuni aspetti di cinematica ......................... 31
5.4 Piattaforma di Stewart ................................... 32
5.6 Risultati sperimentali .................................... 33
CONCLUSIONI E SVILUPPI FUTURI ....................... 38
APPENDICE .............................................................. 39
BIBLIOGRAFIA ......................................................... 47
DIST – GRAAL – Genoa Robotics And Automation Lab
3
Università degli Studi di Genova
Facoltà di Ingegneria
INDICE DELLE FIGURE
INTRODUZIONE
Schematizzazione della struttura dell’articolatore
robotizzato………………………………..…………………. 4
2 PROGETTAZIONE DELLE COMPONENTI
MECCANICHE
2.1 Disegni meccanici
Disegno quotato del supporto……………………………..6
Disegno quotato del perno………………………………....7
2.2 Simulazioni
Risultato della simulazione..………………………............8
3 SENSORIZZAZIONE DEL SUPPORTO
3.3 Applicazione degli estensimetri
Faccia superiore del sensore…………………………….12
Faccia inferiore del sensore……………………………...12
3.4 Cablaggio
Faccia superiore del sensore con indicazione delle
piazzole……………………………………………………….13
3.5 I circuiti di misura
Faccia superiore del sensore con cablaggi……………17
Faccia inferiore del sensore con cablaggi……………..18
4 REALIZZAZIONE DEI CIRCUITI ELETTRICI
4.1 Montaggio dell’amplificatore
Interno dell’amplificatore………………………………….19
DIST – GRAAL – Genoa Robotics And Automation Lab
4
Università degli Studi di Genova
Facoltà di Ingegneria
Indicazione degli assi a cui si riferiscono le singole
schede di amplificazione………………………………….20
Parte anteriore dell’amplificatore………………………..21
Parte posteriore dell’amplificatore………………………22
5 TEST
5.1 Diagramma e interfaccia
Diagramma…………………………………………………26
Interfaccia utente………………………………………….27
5.4 Piattaforma di Stewart
Disegno meccanico della Piattaforma di Stewart……31
5.6 Risultati sperimentali
INTRODUZIONE
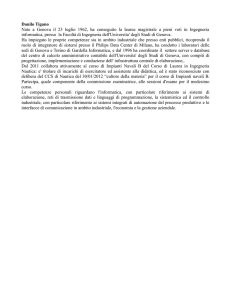
L’attività è stata collocata all’interno di un progetto che richiedeva l’utilizzo di una
piattaforma di Stewart per l’implementazione di un articolatore mandibolare
robotico. Il prototipo realizzato precedentemente aveva la doppia funzionalità di
fornire supporto alla parte fissa (arcata superiore) e di fornire una base per la parte
robotica mobile (piattaforma di Stewart) collegata all’arcata inferiore. La figura
seguente illustra lo schema di principio della struttura realizzata.
DIST – GRAAL – Genoa Robotics And Automation Lab
5
Università degli Studi di Genova
Facoltà di Ingegneria
Platform
Fixed
Structure
Joints
Mobile
Structure
Stewart
Platform
Base
Fig. 1: Schematizzazione della struttura dell’articolatore robotizzato
Questo robot era stato realizzato per ovviare ai problemi presenti nell’utilizzo dei
mandibolatori manuali. Questi infatti avevano i limiti seguenti:
-
erano costruiti in modo da avere l’arcata superiore (mascella) mobile e
quella inferiore (mandibola) immobile, nella realta’ avviene l’esatto contrario;
-
impossibilita’ di interfacciamento con strumenti di registrazione automatica
dei movimenti masticatori;
-
impossibilita’ di replicare carichi reali che vengono esercitati durante i
movimenti masticatori.
I limiti sopra descritti vengono superati con la costruzione dell’articolatore
mandibolare.
1 OBIETTIVO DEL PROGETTO
Lo scopo del progetto è la realizzazione di uno strumento in grado di eseguire test
di carico e stress sui materiali utilizzati in ambito odontoiatrico. Il lavoro consisteva
nella progettazione di una base sensorizzata e di un perno di supporto per le
protesi odontoiatriche nonche’ nella realizzazione di uno strumento per la
visualizzazione e registrazione dei risultati ottenuti durante la fase di test. Questo
DIST – GRAAL – Genoa Robotics And Automation Lab
6
Università degli Studi di Genova
Facoltà di Ingegneria
dispositivo è stato realizzato in modo da poter essere montato sul robot
preesistente.
Il lavoro è stato suddiviso nelle seguenti fasi:
Progettazione delle componenti meccaniche
Sensorizzazione della base
Realizzazione dei circuiti elettronici
Test.
DIST – GRAAL – Genoa Robotics And Automation Lab
7
Università degli Studi di Genova
Facoltà di Ingegneria
2 PROGETTAZIONE DELLE COMPONENTI
MECCANICHE
2.1 Disegni meccanici
In questa fase ci si è dedicati alla progettazione e realizzazione di parti
meccaniche quali supporto e perno. Sulla base verrano poi fissati i sensori per
rilevare l’entita’ delle forze applicate; il perno invece verra’ fissato sul supporto e
quindi sollecitato nelle diverse direzioni planari.
Per far questo ci si è preoccupati di apprendere le funzionalità principali di
SolidWorks
2005, un software per la modellazione 3D, che ha consentito di
realizzare i seguenti disegni meccanici.
Fig. 2: Disegno quotato del supporto
DIST – GRAAL – Genoa Robotics And Automation Lab
8
Università degli Studi di Genova
Facoltà di Ingegneria
Fig. 3: Disegno quotato del perno
DIST – GRAAL – Genoa Robotics And Automation Lab
9
Università degli Studi di Genova
Facoltà di Ingegneria
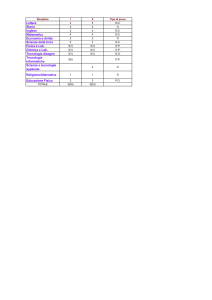
2.2 Simulazioni
Dopo aver creato i disegni delle componenti meccaniche ci si è occupati di
simulare il loro comportamento (in particolare quello del supporto) se sottoposti ad
una certa forza. Per quest’analisi ci si è affidati all’utilizzo di COSMOSXpress
(compreso nell’ambiente di SolidWorks 2005). Con questo strumento abbiamo
simulato di applicare sul supporto una forza di 800N sull’asse z per visualizzare la
deformazione. Per effettuare la simulazione abbiamo considerato il supporto
costruito con una lega di alluminio presente nel database di SolidWorks 2005.
La figura seguente mostra i risultati ottenuti permettendo così di visualizzare le
zone di massima sollecitazione del supporto. La simulazione inoltre permette di
verificare che il modello sopporta il carico massimo applicato.
Fig. 4: Risultato della simulazione
DIST – GRAAL – Genoa Robotics And Automation Lab
10
Università degli Studi di Genova
Facoltà di Ingegneria
3 SENSORIZZAZIONE DEL SUPPORTO
3.1 Cella di carico
Questa fase consiste nella costruzione di una cella di carico, dispositivo in grado di
trasformare una forza meccanica in un segnale elettrico misurabile e registrabile.
Questa apparecchiatura sfrutta l’elasticità di un blocco metallico opportunamente
sagomato che sottoposto a pressione o trazione si deforma lievemente. Per quanto
piccola la deformazione è rilevata da speciali sensori chiamati estensimetri (in
inglese strain gauges). Questi sono fisicamente costruiti da sottilissime lamine in
materiale plastico di dimensioni molto ridotte, generalmente di 5 mm di lunghezza
per 3 mm di larghezza. Se la superficie resistiva dell’estensimetro viene allungata
la resistenza aumenta con un valore proporzionale alla deformazione applicata,
viceversa la resistenza si riduce.
Il materiale adesivo utilizzato per il montaggio di uno strain gauge assolve alla
funzione di trasmettere la deformazione dal materiale della struttura in prova alla
griglia estensimetrica. Tale trasmissione dovrà avvenire riducendo al minimo le
distorsioni.
Le fasi fondamentali per la messa in opera di un estensimetro possono essere così
sintetizzate:
♦ Preparazione della superficie del materiale su cui verrà applicato lo strain gauge
♦ Applicazione dell’estensimetro
♦ Cablaggio
Nello svolgere le fasi bisogna prestare molta attenzione a non toccare superficie
ed estensimetri, ma servirsi di strumenti appositi.
DIST – GRAAL – Genoa Robotics And Automation Lab
11
Università degli Studi di Genova
Facoltà di Ingegneria
3.2 Preparazione della superficie
Trattamento della superficie con carta abrasiva di grana 200 inumidita con del
condizionatore per renderla più porosa e consentire quindi una migliore adesione
della colla. Al termine di questo processo si neutralizza la zona interessata per
eliminare impurità ed eventuali residui, qualsiasi particella infatti pregiudica
un’ottima tenuta.
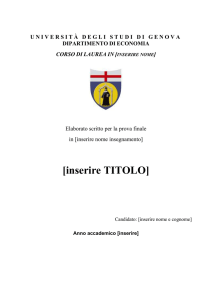
3.3 Applicazione degli estensimetri
La scelta della posizione degli estensimetri viene fatta dopo aver analizzato i
risultati ottenuti dalle simulazioni create in ambiente COSMOSXpress; verranno
scelte le zone di maggiore sollecitazione in riferimento all’asse considerato. Per
posizionare correttamente l'estensimetro sulla zona prevista è opportuno fissarlo
su un pezzo di nastro adesivo per estensimetri (che ha la proprietà di non lasciare
residui). Alzando un lembo del nastro si applica una piccola quantità di colla
facendo attenzione a non incollare i filamenti di uscita dello strain gauge. Avvenuta
l’essicazione della colla, si rimuove il nastro adesivo.
Lo stesso procedimento è stato eseguito per l’applicazione degli estensimetri
“passivi” nelle zone non sollecitate della base.
L’insieme degli estensimetri “attivi” (A) e “passivi” (P) andrà a formare il Ponte di
Wheatstone che, dalle variazioni di resistenza misurate sugli strain gauges,
restituisce variazioni di tensione che forniscono la misura delle deformazioni.
DIST – GRAAL – Genoa Robotics And Automation Lab
12
Università degli Studi di Genova
Facoltà di Ingegneria
P
P
P
A
A
A
A
P
P
P
Fig. 5: Faccia superiore del sensore
A
A
Fig. 6: Faccia inferiore del sensore
estensimetro
DIST – GRAAL – Genoa Robotics And Automation Lab
13
Università degli Studi di Genova
Facoltà di Ingegneria
3.4 Cablaggio
Data la fragilità degli estensimetri è bene collegarne i fili utilizzando delle apposite
piazzole. Queste vengono applicate in zone ininfluenti alle misure e hanno la
funzione di trasferire i valori rilevati su collegamenti più resistenti per le operazioni
di circuitaggio.
Fig. 7: Faccia superiore del sensore con indicazione delle piazzole
piazzola
DIST – GRAAL – Genoa Robotics And Automation Lab
14
Università degli Studi di Genova
Facoltà di Ingegneria
3.5 I circuiti di misura
La variazione di resistenza di un estensimetro viene misurata attraverso un ponte
di Wheatstone, alimentato a tensione costante e inizialmente bilanciato.
Il ponte di Wheatstone è un dispositivo che converte le variazioni di resistenza in
variazioni di tensione che possono essere amplificate e successivamente
registrate attraverso comuni sistemi di acquisizione. La scelta dell’utilizzo di questo
circuito di misura è seguita ad un’attenta valutazione dei vantaggi che se ne
vogliono ricavare tra cui disaccoppiare gli assi, amplificare le deformazioni rilevanti
e ridurre il più possibile le deformazioni spurie.
Un’importante proprietà sfruttata per posizionare opportunamente gli estensimetri
che formano il ponte di Wheatstone è data dal fatto che le deformazioni degli strain
gauges relative a due rami consecutivi del ponte si sottraggono mentre quelle
relative a due rami opposti si sommano.
Tale proprietà consente di:
• compensare la deformazione termica apparente
• eliminare gli effetti di deformazioni spurie
• amplificare il segnale di misura
Per il nostro progetto si è scelta una configurazione per il ponte di Wheatstone
detta “a mezzo ponte” costituita da due estensimetri “attivi” e due “passivi”. La
configurazione per ciascun asse è presentata nelle figure seguenti.
DIST – GRAAL – Genoa Robotics And Automation Lab
15
Università degli Studi di Genova
Facoltà di Ingegneria
ASSE X
+ Vcc
E1
E3
E4
E2
ΔVout
ASSE Y
+Vcc
E7
E8
E5
E6
ΔVout
DIST – GRAAL – Genoa Robotics And Automation Lab
16
Università degli Studi di Genova
Facoltà di Ingegneria
ASSE Z
+Vcc
E11
E10
E9
E12
ΔVout
Estensimetro attivo
Estensimetro passivo
Nelle figure seguenti presentiamo uno schema elettrico del sensore.
DIST – GRAAL – Genoa Robotics And Automation Lab
17
Università degli Studi di Genova
Facoltà di Ingegneria
Fig. 8: Faccia superiore del sensore con cablaggi
SEGNALE ASSE Z
SEGNALE
ASSE Y
SEGNALE
ASSE X
fili di collegamento della faccia superiore
fili di collegamento tra la faccia superiore e quella inferiore
fili di collegamento tra il sensore e la “scatola”
+BS
alimentazione del ponte
- BS
+ IP
- IP
uscita del ponte
DIST – GRAAL – Genoa Robotics And Automation Lab
18
Università degli Studi di Genova
Facoltà di Ingegneria
Fig. 9: Faccia inferiore del sensore con cablaggi
DIST – GRAAL – Genoa Robotics And Automation Lab
19
Università degli Studi di Genova
Facoltà di Ingegneria
4 REALIZZAZIONE DEI CIRCUITI ELETTRICI
4.1 Montaggio dell’amplificatore
L’amplificatore e’ composto da:
generatore di tensione (alimentatore e trasformatore)
3 schede di amplificazione (una per ogni asse) .
SCHEDA DI
AMPLIFICAZIONE
TRASFORMATORE
ALIMENTATORE
Fig. 10: Interno dell’amplificatore
DIST – GRAAL – Genoa Robotics And Automation Lab
20
Università degli Studi di Genova
Facoltà di Ingegneria
ASSE Y
ASSE Z
ASSE X
Fig. 11: Indicazione degli assi a cui si riferiscono le singole schede di
amplificazione
DIST – GRAAL – Genoa Robotics And Automation Lab
21
Università degli Studi di Genova
Facoltà di Ingegneria
Nella parte anteriore dell’amplificatore abbiamo:
-
3 connettori di ingresso
-
1 interruttore di accensione (con il relativo LED)
I connettori hanno la funzione di portare dai tre ponti della base sensorizzata i
segnali alle corrispondenti schede di amplificazione.
ASSE Y
ASSE Z
INTERRUTTORE
ASSE X
Fig. 12: Parte anteriore dell’amplificatore
DIST – GRAAL – Genoa Robotics And Automation Lab
22
Università degli Studi di Genova
Facoltà di Ingegneria
Nella parte posteriore dell’amplificatore abbiamo:
-
1 connettore di uscita
-
cavo di alimentazione
Nel connettore vengono riuniti i segnali di uscita delle schede che vengono passati
in ingresso alla scheda di acquisizione del PC.
CONNETTORE DI
USCITA
CAVO DI
ALIMENTAZIONE
Fig. 13: Parte posteriore dell’amplificatore
DIST – GRAAL – Genoa Robotics And Automation Lab
23
Università degli Studi di Genova
Facoltà di Ingegneria
4.2 Caratterizzazione del sensore
In questa fase del progetto ci si è preoccupati di caratterizzare completamente il
sensore ricavando dei fattori di conversione per i 3 assi tra le tensioni in uscita
dall’amplificatore e i chilogrammi applicati sul sensore. Abbiamo effettuato delle
prove fisiche nelle quali abbiamo applicato al sensore pesi noti (da 0 a 12 kg per
l’asse z, da 0 a 6 kg per gli assi x e y) per registrare le tensioni rilevate in uscita.
Dopo aver ripetuto più volte queste prove abbiamo ottenuto i seguenti fattori di
conversione:
ASSE X: 0,002 V/kg
ASSE Y: 0,01 V/kg
ASSE Z: 0,007 V/kg
Questi fattori verranno poi utilizzati nel diagramma realizzato con LabVIEW.
DIST – GRAAL – Genoa Robotics And Automation Lab
24
Università degli Studi di Genova
Facoltà di Ingegneria
5 TEST
Per la fase di test ci si è avvalsi dell’utilizzo di LabVIEW.
Con questo linguaggio di programmazione è possibile creare applicazioni di test e
misura, di acquisizione e memorizzazione dati.
5.1 Diagramma e interfaccia
Lo strumento realizzato ha lo scopo di acquisire i segnali amplificati in uscita
dall’amplificatore attraverso i canali di una scheda hardware collegata al computer.
Questi segnali vengono poi filtrati e memorizzati su file.
L’acquisizione avviene all’interno di un ciclo while (1), eseguito ogni 50 ms (2),
attraverso un canale multiplo per ingressi analogici (3) dove vengono specificati i
nomi dei canali con i relativi numeri di riferimento. L’uscita di questo dispositivo di
input è posta in ingresso a tre array (4). Agli elementi dell’array viene sottratto un
offset (5) allo scopo di azzerare il segnale. Viene eseguita la sottrazione quando si
verifica la condizione posta in ingresso ad una struttura case (6) all’interno del
quale si calcola il valore da sottrarre per mezzo di un nodo formula (7). Il nodo
formula ha tre ingressi che corrispondono agli elementi correnti degli array e tre
uscite che ricopiano gli ingressi in variabili locali (8). Al verificarsi della condizione
ad ogni valore in uscita dall’array viene sottratto il valore calcolato presente nella
variabile locale. Questa condizione è verificata quando viene premuto il pulsante
posto nell’interfaccia.
DIST – GRAAL – Genoa Robotics And Automation Lab
25
Università degli Studi di Genova
Facoltà di Ingegneria
Il segnale in uscita dal sottrattore è espresso in Volt e viene convertito in Kg
attraverso una divisione (9) per il fattore di conversione calcolato nella fase di
caratterizzazione del sensore. Il filtraggio del segnale avviene per mezzo di una
media matematica tra il valore del ciclo corrente e i 2 valori precedenti realizzata
attraverso un registro a scorrimento (10). Il segnale mediato viene graficato con un
Waveform Chart (11) ed un indicatore dei Kg. applicati (12). Con i segnali mediati
dei tre assi viene creato un array (13) necessario per il salvataggio dei dati su file
(14).
DIST – GRAAL – Genoa Robotics And Automation Lab
26
Università degli Studi di Genova
Facoltà di Ingegneria
Fig. 14 Diagramma
DIST – GRAAL – Genoa Robotics And Automation Lab
27
Università degli Studi di Genova
Facoltà di Ingegneria
Fig. 15 Interfaccia utente
DIST – GRAAL – Genoa Robotics And Automation Lab
28
Università degli Studi di Genova
Facoltà di Ingegneria
5.2 Macchine seriali e parallele
Un meccanismo viene chiamato seriale se non si instaurano percorsi chiusi
all’interno della sua catena cinematica; pertanto i vari membri risultano connessi in
serie da vari tipi di coppie ed il meccanismo presenta un estremo fisso a telaio
mentre quello opposto è libero di muoversi nello spazio; per questo motivo tali
meccanismi sono anche chiamati in catena cinematica aperta.
Le macchine parallele, invece, solitamente consistono in una piattaforma mobile
che è connessa al telaio da varie “zampe” uguali; tipicamente il numero di “arti” è
uguale al numero di mobilità del meccanismo così che ogni gamba è controllata da
un attuatore e tutti gli attuatori possono essere montati sulla base fissa od in
vicinanza di questa; per questo motivo le macchine parallele sono a volte chiamate
piattaforme e vengono anche chiamate macchine in catena cinematica chiusa
perché è possibile identificare più circuiti chiusi che connettono tra loro i vari
membri.
La maggior parte delle macchine parallele attualmente realizzate è composta da 6
assi controllati e pertanto consente di effettuare movimenti a 6 gradi di libertà nello
spazio tramite lo spostamento di 6 “zampe” estensibili. Queste macchine, proprio a
causa della particolare natura della loro struttura cinematica, possiedono molti
vantaggi rispetto alle strutture seriali:
-
elevata capacità di carico che deriva dalla possibilità di suddividere le forze
esterne tra tutte le gambe che supportano la piattaforma,
-
elevate rigidezze e frequenze naturali elevate.
DIST – GRAAL – Genoa Robotics And Automation Lab
29
Università degli Studi di Genova
Facoltà di Ingegneria
L’accuratezza ottenibile è molto elevata, sia per le caratteristiche dinamiche sopra
commentate, sia perché gli errori sui vari assi non si sommano tra loro come per le
strutture seriali ma in modo più “mediato”; inoltre la buona precisione di
posizionamento deriva anche dalle ridotte flessioni, che hanno sempre forti
ripercussioni sugli errori (e non sono peraltro misurabili). Anche dal punto di vista
della costruzione meccanica si hanno notevoli vantaggi in quanto questa è
relativamente semplice e soprattutto modulare (per es. nel caso degli esapodi,
sono costituiti da 6 zampe identiche, 6 giunti identici sulla piattaforma fissa e 6 (o 3
giunti identici sulla piattaforma mobile), anche se le precisioni richieste sono
sempre elevate e la progettazione risulta, invece, notevolmente complessa.
Passando ad evidenziare gli svantaggi, sicuramente il maggiore di essi è dato dallo
spazio di lavoro di queste macchine, che risulta solitamente limitato in estensione,
caratterizzato da bassa destrezza e da una geometria molto complessa, che rende
poi difficile la programmazione dei compiti, spesso anche a causa della presenza
di punti singolari all’interno dello spazio stesso. Inoltre va citata la complessità
delle equazioni della cinematica diretta tanto che alcune varianti speciali della
piattaforma di Stewart rappresentano l’unico tipo di meccanismo parallelo a 6 assi
di cui siano state ricavate le equazioni complete in forma chiusa; ciò comporta
delle difficoltà in fase di progettazione, quando occorre effettivamente ricavare le
relazioni cinematiche in forma esplicita, ma anche in fase di realizzazione del
sistema di controllo, che deve garantire l’esecuzione di un gran numero di calcoli in
un tempo molto breve. Infine, si evidenzia una certa sensibilità agli effetti termici, la
cui influenza diventa ovviamente più rilevante nel caso di macchine parallele
utilizzate per applicazioni di precisione.
DIST – GRAAL – Genoa Robotics And Automation Lab
30
Università degli Studi di Genova
Facoltà di Ingegneria
5.3 Alcuni aspetti di cinematica
Nello studio della meccanica delle macchine si parla di problema cinematico
inverso quando, essendo noto il compito assegnato alla macchina, occorre
determinare gli spostamenti dei motori che ne consentono l’esecuzione: nel caso di
un robot, per esempio, è il problema che deve risolvere il controllore che riceve in
ingresso la traiettoria specificata nello spazio operativo e deve inviare i segnali di
riferimento agli azionamenti dei singoli motori; per una struttura seriale, quale
quella dei manipolatori, questo problema è piuttosto complesso e può ammettere
(se il robot è ridondante) più soluzioni, nel senso che ci possono essere più
configurazioni (o “posture”) del robot che corrispondono alla stessa posa del
dispositivo terminale. Il problema cinematico diretto, invece, consiste, note le
posizioni dei giunti, nel calcolare la relativa posizione del dispositivo terminale nello
spazio operativo; per un robot parallelo, questo problema diventa quello della
determinazione della posa della piattaforma, assumendo di conoscere la
lunghezza degli arti. Il problema cinematico diretto, che è piuttosto semplice ed
ammette una sola soluzione per le strutture cinematiche seriali, diventa molto
complesso per quelle parallele ed ammette in genere più soluzioni. La difficoltà
dello studio è tale che molto spesso non si è neanche in grado di determinare a
priori quante soluzioni ammette il problema; inoltre, quando anche il loro numero
sia noto, a volte esse sono calcolabili solo in forma ricorsiva, il che non è
generalmente compatibile con le esigenze del sistema di controllo, che deve
garantire l’esecuzione dei suoi algoritmi in tempo reale. Inoltre le strutture parallele
sono spesso caratterizzate da molte configurazioni singolari interne allo spazio di
lavoro del robot e quindi difficilmente identificabili.
DIST – GRAAL – Genoa Robotics And Automation Lab
31
Università degli Studi di Genova
Facoltà di Ingegneria
5.4 Piattaforma di Stewart
La Piattaforma di Stewart utilizzata nella fase di test del progetto è un esempio
classico di macchina parallela di cui si è parlato nei paragrafi precedenti. Questa è
un meccanismo parallelo che consiste di un corpo rigido superiore, o piatto mobile,
collegato ad una base fissa ed è definito da almeno tre punti stazionari sulla base
fissa connessa a sei gambe cinematiche indipendenti. Tipicamente, le sei gambe
sono connesse alla base fissa e al corpo rigido superiore da giunti universali in
parallelo localizzati ad ambo gli estremi di ogni gamba. Le gambe sono disegnate
con un corpo superiore e un corpo inferiore che possono essere aggiustati,
permettendo ad ogni gamba di essere variata in lunghezza (vedi figura 17).
Fig. 16 Disegno meccanico della Piattaforma di Stewart
La posizione ed orientamento della piattaforma mobile variano in base alla
lunghezza delle sei gambe. La Piattaforma di Stewart può essere usata per
posizionare la piattaforma in sei gradi di libertà (tre gradi di libertà rotazionali, così
come tre gradi di libertà traslazionali). In generale, il corpo rigido superiore è di
forma triangolare ed è ruotato di 60 gradi rispetto alla base inferiore, permettendo
a tutte le gambe di essere equidistanti l'una dall'altra e ad ogni gamba di muoversi
indipendentemente dalle altre.
DIST – GRAAL – Genoa Robotics And Automation Lab
32
Università degli Studi di Genova
Facoltà di Ingegneria
La scelta dell’utilizzo di questa macchina per il progetto è dovuta ai vantaggi
derivanti da essa, in particolare l’elevata capacità di carico che permette di
replicare i carichi reali che vengono esercitati durante la masticazione. Da notare
che la piattaforma utilizzata è un prototipo realizzato con un budget ridotto pertanto
non presenta l’accuratezza che caratterizza questo tipo di struttura.
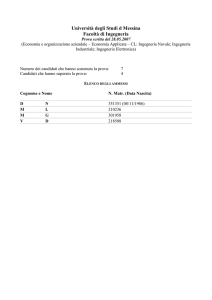
5.6 Risultati sperimentali
In quest’ultima fase si sono realizzate alcune prove utilizzando la piattaforma di
Stewart collegata al sensore e all’amplificatore. In particolare sulla piattaforma
mobile è applicato il sensore (che supporta il dente da testare), mentre sul corpo
rigido superiore è fissata una mascella in acciaio.
Per effettuare questi esperimenti sono state tracciate delle traiettorie da far seguire
alla piattaforma per poi graficare con Matlab 6.1 i segnali memorizzati su file
attraverso il diagramma di fig. 14
Nelle figure seguenti vengono visualizzati i risultati ottenuti soffermandoci
principalmente sui segnali relativi all’asse z. Nelle figure 19 e 20 si può notare una
differenza nel numero di “picchi” presenti; questo è dovuto al fatto che la traiettoria
utilizzata durante la prova 3 presentava 5 iterazioni mentre quella della prova 4 ne
aveva 10.
DIST – GRAAL – Genoa Robotics And Automation Lab
33
Università degli Studi di Genova
Facoltà di Ingegneria
PROVA 1
Fig. 17: Risultati ottenuti durante la PROVA 1
DIST – GRAAL – Genoa Robotics And Automation Lab
34
Università degli Studi di Genova
Facoltà di Ingegneria
PROVA 2
Fig. 18: Risultati ottenuti durante la PROVA 2
DIST – GRAAL – Genoa Robotics And Automation Lab
35
Università degli Studi di Genova
Facoltà di Ingegneria
PROVA 3
Fig. 19: Risultati ottenuti durante la PROVA 3
DIST – GRAAL – Genoa Robotics And Automation Lab
36
Università degli Studi di Genova
Facoltà di Ingegneria
PROVA 4
Fig. 20: Risultati ottenuti durante la PROVA 4
DIST – GRAAL – Genoa Robotics And Automation Lab
37
Università degli Studi di Genova
Facoltà di Ingegneria
CONCLUSIONI E SVILUPPI FUTURI
Il sistema realizzato risulta funzionante, e le prestazioni ottenute durante le prove
sperimentali eseguite in laboratorio risultano soddisfacenti lo scopo prefissato.
In futuro per ottenere dalle prove dei risultati più precisi suggeriamo di utilizzare
una piattaforma realizzata in modo più accurato. Una possibile miglioria consiste
nell’utilizzare giunti che non presentino giochi meccanici a differenza di quelli
attualmente in uso.
E’ consigliabile inoltre una migliore schermatura dei cavi di collegamento tra
l’amplificatore ed il sensore e di quelli presenti all’interno dell’amplificatore.
Successivamente potrebbe essere necessario ripetere gli esperimenti effettuati per
caratterizzare il sensore utilizzando pesi i cui valori siano noti con precisione
maggiore di quelli utilizzati in questo progetto.
Un ulteriore sviluppo è dato dalla ripetizione delle prove da noi svolte in laboratorio
utilizzando però materiali di tipo diverso per la costruzione del dente applicato sul
perno. In questo modo sarebbe infatti possibile un utile confronto dei risultati.
Il progetto realizzato ci ha permesso di apprendere nozioni aggiuntive nell’ambito
di discipline trattate nel corso di studi quali elettronica ed elettrotecnica. Trattandosi
di un corso di studio informatico e non elettronico infatti l’attività svolta in questi
mesi ci ha dato la possibilità di acquisire una certa praticità in ambiti a noi
sconosciuti (ad esempio saldatura, assemblaggio di componenti....). Possiamo
quindi concludere che nonostante il progetto si presentasse inizialmente
complesso e in larga parte al di fuori delle nostre conoscenze ci ha permesso di
DIST – GRAAL – Genoa Robotics And Automation Lab
38
Università degli Studi di Genova
Facoltà di Ingegneria
APPENDICE
Scheda per amplificatore di estensimetri
Scheda c.s. in fibra a faccia singola da 46mm x 98mm
Accoglie l'amplificatore di estensimetri RS per produrre un circuito di
interfaccia per elementi di resistenza al platino, estensimetri, trasduttori di
pressione, celle di carico ed altri trasduttori con configurazione a ponte
resistivo
La scheda con piste pre-stagnate viene fornita con l'overlay dei componenti
(componenti non forniti) e con un opuscoletto di istruzioni contenente una
lista completa dei componenti ed i dettagli del circuito
DIST – GRAAL – Genoa Robotics And Automation Lab
39
Università degli Studi di Genova
Facoltà di Ingegneria
Circuito stampato della scheda di amplificazione
DIST – GRAAL – Genoa Robotics And Automation Lab
40
Università degli Studi di Genova
Facoltà di Ingegneria
Elenco dei componenti
COMPONENTE
VALORE
R1, R3
100 KΩ
R2, R6
100 Ω
R4
68 Ω
R5, R8
10 Ω
R7
47 Ω
R9
1K
R10, R11
680 Ω
VR1, VR2
10 K
C1, C6, C7
100 nF
C2, C5
10 nF
C3, C4
10 µF
T1
BD135
T2
BD136
T3
BD108
CONNETTORE A 4 VIE
CONNETTORE A 3 VIE
AMPLIFICATORE DI ESTENSIMETRI
DIODI D1, D2
LM4040DIZ-5.0
I valori delle resistenze R1 e R2 riportati nella tabella impostano il guadagno a
1000. E’ pero’ possibile modificarlo il base alla seguente equazione:
Guadagno= 1+R1/R2
DIST – GRAAL – Genoa Robotics And Automation Lab
41
Università degli Studi di Genova
trimer di regolazione
Facoltà di Ingegneria
trimer di regolazione dell’offset
dell’alimentazione del ponte
DIST – GRAAL – Genoa Robotics And Automation Lab
42
Università degli Studi di Genova
Facoltà di Ingegneria
Amplificatore estensimetri
Amplificatore versatile alloggiato in un involucro DIL da 24 piedini
Il modulo è stato progettato per essere utilizzato con ponti estensimetrici ma
può essere anche impiegato in applicazioni in cui si richiede un
amplificatore a bassa deriva, ad esempio sensori resistivi al platino,
trasduttori di pressione, ecc.
Temperatura di funzionamento: da -25°C a +85°C
Tensione di alimentazione: da ±2V a ±20V=
DIST – GRAAL – Genoa Robotics And Automation Lab
43
Università degli Studi di Genova
Facoltà di Ingegneria
Specifiche tecniche
VS = ±12V
Resistenza di carico = 2kΩ
Tensione di offset
200 V max.
Tensione di offset
in funzione della temperatura
in funzione del tempo
0,3 V/mese
in funzione della tensione di
alimentazione
Impedenza d'ingresso
3 V/V
5MΩ
Larghezza di banda
450kHz (a guadagno unitario)
Intervallo tensione in uscita
±Vs-2V
Corrente di uscita
5mA
Guadagno ad anello chiuso
regolabile da 3 a 60.000
Guadagno ad anello aperto
120dB
Reiezione di modo comune
120dB
Tensione del ponte in funzione della temperatura 20 V/°C
Corrente max. alimentazione ponte
12mA
Assorbimento
0,5W
DIST – GRAAL – Genoa Robotics And Automation Lab
44
Università degli Studi di Genova
Facoltà di Ingegneria
Estensimetri
Serie di estensimetri a lamina adatti per analisi generali di deformazione e
stress meccanico in campo ingegneristico
Entrambe le superfici di questi sensori sono laminate proteggendo così
totalmente la maglia laminata di Nichelina
Tutti i sensori sono dotati di conduttori per consentirne la facile installazione
Utilizzabili singolarmente o a rosetta estensimetrica con compensazione di
temperatura per l'uso con alluminio o acciaio
Per le applicazioni in cui si necessita di punti di misurazione o il
monitoraggio di piccoli componenti usare i sensori di 2mm di lunghezza,
mentre per misurazioni di carattere generale sono ideali i sensori da 5mm
Per il montaggio del ponte di Wheastone sono stati scelti estensimetri di 2 mm di
lunghezza.
DIST – GRAAL – Genoa Robotics And Automation Lab
45
Università degli Studi di Genova
Facoltà di Ingegneria
Specifiche tecniche
Lungh. estensimetro
2 o 5mm
Deformazione misurabile
da 2 a 4% max.
Temperatura di funzionamento
da -30°C a +180°C
Resistenza estensimetro
120Ω ±0,5%
Fattore strumento
2 (nominale)
Coefficiente temperatura fattore
strumento
Deformazione
±0,015%/°C
da -30°C a 20°C (non specificato)
da 20°C a 160°C +2 micro
termica
deformazioni/°C*
da 160°C a 180°C ±5 micro
deformazioni/°C*
Durata
105 inversioni a 1000 micro deformazioni
Materiale lamina
Nichelina
Materiale di base
Poliammide
Compensazione di temperatura
Materiale
Fattore espansione lineare
Acciaio dolce
10,8 x 10-5/°C
Alluminio
23,4 x 10-5/°C
* 1 micro deformazione equivale ad un'estensione di 0,0001%
DIST – GRAAL – Genoa Robotics And Automation Lab
46
Università degli Studi di Genova
Facoltà di Ingegneria
BIBLIOGRAFIA
Siti internet
[1] www.rs-components.it
[2] www.dic.univ.trieste.it
[3] www.dpa.unina.it
[4] www.missilistica.it
DIST – GRAAL – Genoa Robotics And Automation Lab
47