IL SOTTOSISTEMA POWER
DEL DIMOSTRATORE TECNOLOGICO SATELLITARE
(DTS)
www.edusat.it
INDICE
1.
Introduzione..................................................................................................................3
2.
Lista delle abbreviazioni e unità di misura.................................................................3
3.
Le funzioni del sottosistema.........................................................................................4
4.
I requisiti di progetto del sottosistema Power............................................................5
5.
Un confronto fra le caratteristiche minime di progetto e quelle ottimali.................6
6.
Allocazione delle potenze richieste al sottosistema Power.........................................9
7.
L’architettura del sottosistema Power.......................................................................10
8.
Requisiti e criteri di scelta della batteria e dei pannelli solari................................14
8.1
Le funzioni dei generatori elettrici del DTS.......................................................14
8.2
I criteri di scelta del tipo di batteria...................................................................15
8.3
Le caratteristiche della batteria del DTS...........................................................18
8.4
Le prestazioni della batteria del DTS................................................................21
8.5
Le caratteristiche dei pannelli solari..................................................................23
9.
Il sistema di distribuzione della potenza...................................................................29
10.
Il sistema di carica della batteria mediante rete esterna.....................................29
11.
Il sistema di gestione della potenza.......................................................................29
11.1
Premessa..............................................................................................................29
11.2
I convertitori DC/DC............................................................................................30
11.3
Il Caricabatteria...................................................................................................34
12.
Il sistema di monitoraggio (telemetria)..................................................................37
12.1
I sensori di temperatura......................................................................................37
12.2
Sensori di corrente...............................................................................................41
12.3
Diagnostica dello stato della batteria.................................................................41
13.
Aspetti tecnologici e realizzazione..........................................................................44
2
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Introduzione
Questo documento descrive il Sottosistema Power, cioè di alimentazione elettrica del
Dimostratore Tecnologico Satellitare (DTS). Lo schema che viene seguito segue un
approccio che in inglese viene definito “top-down” ovverosia dall’alto verso il basso,
cioè parte dalla descrizione generale per scendere via via nei particolari del progetto e
quindi della realizzazione pratica.
1. Lista delle abbreviazioni e unità di misura
Ω
°C
C
°K
A
ACS
Ah
BCR
C
COMMS
DC
DC/DC
Ohm. Unità di misura di resistenza elettrica nel Sistema Internazionale
Gradi centigradi. Unità di misura della temperatura
Coulomb, Unità di misura della Carica Elettrica, nel Sistema Internazionale
Gradi Kelvin. Unità di misura della temperatura assoluta nel Sistema Internazionale
0 ° C = 273,16 ° K
Ampere: unità di misura della corrente elettrica nel Sistema Internazionale
Attutude Control Subsystem – Sottosistema di Controllo di Assetto
AmperOra. Unità di misura della carica elettrica immagazzinata in una batteria.
Battery Charge Regulator – Regolatore di Carica della Batteria
Coulomb, Unità di misura della Carica Elettrica nel Sistema Internazionale
Sottosistema di comunicazioni del DTS
Direct Current – Corrente Continua
Convertitore da una tensione continua ad altra tensione continua
dm3
decimetri cubi. Unità di misura di volume. 1 decimetro cubo equivale ad 1 litro
DTS
Dimostratore Tecnologico Satellitare
LDO
Low Drop-Out – A bassa Caduta (di tensione). E’ riferito a regolatori elettronici di
tensione
LED
Light Emitting Diode – Diodo Emettitore di Luce
Li-Ion
Ioni di Litio. Una tecnologia per la realizzazione di batterie ricaricabili
NiCd
Nickel – Cadmio. Una tecnologia per la realizzazione di batterie ricaricabili
NiMH
Nickel Metallo Idruro. Una tecnologia per la realizzazione di batterie ricaricabili
OBDH
On Board Data Handling – Elaborazione Dati a Bordo
V
Volt: unità di misura della tensione elettrica (differenza di potenziale) nel Sistema
Internazionale.
W
Watt: unità di misura della potenza elettrica nel Sistema Internazionale.
1W=1Vx1A
Wh
Wattora: unità di misura dell’energia elettrica. Si usa in genere per le batterie e per i
contatori elettrici per uso domestico e industriale.
3
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Le funzioni del sottosistema power in un satellite
Gli obiettivi del sottosistema di alimentazione di un satellite artificiale sono quelli di
generare, immagazzinare e gestire l’energia elettrica in modo da sostenere
l’operatività del satellite durante la missione.
Affinché questi obiettivi siano raggiunti, i componenti del sottosistema di
alimentazione di un satellite devono svolgere le seguenti funzioni:
•
generazione di potenza
•
immagazzinamento di energia
•
distribuzione della potenza
•
regolazione della potenza erogata ai vari apparati
•
monitoraggio dei valori di tensione erogata e delle correnti assorbite dagli apparati
di bordo
In un satellite in orbita, la funzione di generazione della potenza è svolta da un
generatore solare, costituito da celle solari, e l’immagazzinamento di energia è
affidato ad una batteria ricaricabile a ioni di litio.
Poiché il generatore solare e la batteria sono connessi fra di loro e con gli apparati da
alimentare elettricamente, una configurazione in “OR” di diodi gestisce la distribu­
zione della potenza erogata da questi dispositivi, facendo in modo che, quando le
celle solari sono illuminate dal sole, gli apparati siano alimentati dal generatore solare
e se necessario anche la batteria sia ricaricata, e quando invece il generatore solare
non è illuminato, sia la batteria a fornire potenza agli apparati di bordo.
La funzione di regolazione della potenza è svolta da:
•
un regolatore di carica della batteria (BCR) che include i circuiti di protezione per il
funzionamento della batteria
•
convertitori DC/DC che interfacciano con il bus di potenza principale non regolato
per fornire le tensioni secondarie stabilizzate e regolate richieste per l’operatività
degli altri sottosistemi a bordo del DTS.
La funzione di regolazione della potenza include la distribuzione delle tensioni
secondarie.
La funzione di monitoraggio è svolta da circuiti di rilevazione di tensioni, correnti e
temperatura distribuiti su diversi punti del dimostratore.
Come vedremo nei successivi paragrafi, il DTS è destinato ad operare in aule
scolastiche ed i pannelli solari, illuminati da luce artificiale, sono in grado di fornire
una potenza significativamente minore di quella che erogherebbero se fossero esposti
al sole in orbita terrestre. Questi requisiti hanno portato ad una modifica dello schema
funzionale ed elettrico rispetto a quella di un satellite effettivo, limitando l’uso dei
pannelli solari alla sola alimentazione della ruota di inerzia del sottosistema ACS.
2. I requisiti di progetto del sottosistema Power del DTS
I requisiti generali applicati al progetto del DTS, che hanno influenzato a loro volta i
requisiti del sottosistema Power ,si possono riassumere come segue:
4
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
•
efficienza la più alta possibile (questa caratteristica determina un risparmio di
energia generata e dissipata con impatto sulla affidabilità dei componenti)
•
la temperatura all’interno del DTS non deve superare il limite di normale
funzionamento dei componenti impiegati
•
dimensioni: 300 x 300 x 300 mm3
•
peso inferiore a 13 Kg
Sono definiti due tipi di interfaccia per il sottosistema Power:
•
Bus Dati: questo provvede alla comunicazione con l’OBDH per la trasmissione delle
telemetrie
•
Bus di Potenza: questo fornisce l’energia a tutti i sottosistemi
I carichi elettrici sono rappresentati dai sottosistemi del satellite:
•
OBDH (sottosistema di trattamento dati)
•
COMMS (sottosistema di Comunicazioni con ricetrasmettitore UHF)
•
ACS (sottosistema di controllo di assetto)
Il Bus di potenza deve rispondere ai requisiti seguenti:
•
fornire l’energia elettrica dalle sorgenti di energia, cioè pannelli solari o batteria, ai
carichi che abbiamo elencato
•
tutti i sottosistemi devono essere alimentati da convertitori DC/DC che devono
garantire valori di tensione, ondulazione residua (chiamata anche con il termine
inglese di “ripple”), ecc… con una accuratezza e regolazione quanto più elevata
possibile
•
fornire agli utilizzatori protezioni contro sovratensioni e sovracorrenti, allo scopo di
prevenire danni derivanti da funzionamenti anomali nei circuiti degli utilizzatori
stessi
•
la distribuzione della potenza deve essere con ritorno primario/secondario non
isolato
Nel progetto si ipotizza che il satellite, di cui il DTS è il dimostratore, debba essere
immesso in un’orbita circolare con inclinazione tra 30° e 50° ad una altezza di circa
700 Km. La velocità del satellite in orbita è stimata essere di circa 27000 Km/h. Per
queste condizioni si avrebbero i seguenti parametri orbitali e di assetto:
•
Torbita = 100 minuti (periodo orbitale)
•
Tsun = 65 minuti (tempo di esposizione al Sole durante ciascuna orbita)
•
Teclisse = 35 minuti (tempo di eclissi durante ciascuna orbita)
5
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
•
Assetto in orbita: tombolante oppure stabilizzato mediante puntamento verso il
Sole
3. Un confronto fra le caratteristiche minime di progetto e quelle ottimali
La tabella 1 mostra le caratteristiche minime di progetto e quelle nominali per il
sottosistema Power.
Funzioni del
sottosistema
Descrizione
Condizioni di funzionamento
Minime
Nominali
Generazione della
potenza elettrica
Potenza elettrica
generata durante la
missione
Batteria
Celle solari durante
l’esposizione al Sole.
Batteria durante le
eclissi
Immagazzinamento di
Energia
Energia elettrica
immagazzinata per la
missione
------------
Batteria (ricaricata dalle
celle solari)
Distribuzione della
potenza
Potenza elettrica
distribuita durante la
missione
Cablaggio, Convertitori
dc/dc e sistema di
masse
Cablaggio, Convertitori
dc/dc, sistemi di
protezione dai guasti
Regolazione della
potenza
Controllo elettrico della
potenza durante la
missione
------------
Controllo celle solari,
regolazione della
tensione del Bus
attraverso la
conversione dc/dc,
carica della batteria
Tabella 1 – Condizioni di funzionamento del sottosistema Power durante la missione
A causa del tipo di missione (il DTS dovrà operare in un'aula di laboratorio), la
sorgente di energia opererà in condizioni minime di funzionamento, ossia utilizzando
prevalentemente la batteria.
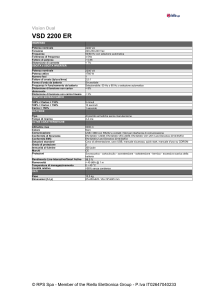
La Figura 1 mostra il principio del sistema di alimentazione impiegato e la Figura 2 la
variante specifica per l’applicazione didattica costituita dal DTS. In ambedue le figure
sono identificati i blocchi funzionali riportati nella Tabella 2 che segue.
6
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Blocco funzionale
Funzioni svolte
GENERATORE SOLARE
BATTERIA
CIRCUITO DI DISTRIBUZIONE
(BCR) CARICA BATTERIA
DC/DC
INTERRUTTORE MECCANICO
Genera la potenza elettrica attraverso la radiazione solare
Immagazzina l’energia elettrica
Combina le due sorgenti di alimentazione (generatore solare e
batteria)
Assicura la corretta carica della batteria Li-Ion
Converte il livello di tensione DC per soddisfare le richieste
specifiche dei sotto-sistemi
Mantiene la batteria isolata fino al momento dell’impiego
Tabella 2 - Funzioni e blocchi funzionali del sottosistema Power
Figura 1 - schema di principio del sottosistema Power per il funzionamento con la luce
solare
7
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Figura 2 - schema di principio del sottosistema Power modificato per l’applicazione
didattica
La differenza fra questi due schemi, peraltro abbastanza simili, sta nell’utilizzo dei
pannelli solari e della batteria:
•
nel primo schema, quello di principio, tutti i sottosistemi presenti possono essere
alimentati sia dai pannelli solari che dalla batteria
•
nel secondo schema si è tenuto conto della limitata potenza fornibile dai pannelli
solari a causa della ridotta illuminazione (artificiale) utilizzabile in un laboratorio
scolastico, e quindi, mentre la batteria può alimentare tutti i sottosistemi presenti,
il generatore solare può alimentare solo il convertitore DC/DC a 15 V, e tramite
questo solo la ruota di inerzia. Il circuito di distribuzione combina quindi le due
sorgenti di alimentazione solo per quest’ultimo dispositivo. Inoltre, la carica della
batteria non viene più affidata al generatore solare, ma solo ad un alimentatore
esterno.
8
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Allocazione delle potenze richieste al sottosistema Power
La Tabella 3 riassume le potenze elettriche consumate da tutto il DTS.
La potenza allocata è stata calcolata sulla base di valori di consumo stimati per
ciascun sottosistema.
Sistema
Unit
à
Valor
e
ACS (Controllo d’assetto), valore di picco
W
3,0
COMMS (Comunicazioni)
W
0,1
OBDH (Elaborazione Dati a Bordo)
W
0,1
Power (Sottosistema di Alimentazione)
W
0,2
Potenza dissipata nel sottosistema
W
0,4
Potenza totale da fornire
W
3,8
Wh
99
Energia Batteria
Tempo massimo di funzionamento
h
25h 22’
Tabella 3 - Bilancio energetico del DTS
NOTA: Tutti i sottosistemi non richiedono la potenza loro allocata in modo
continuativo cosicché la potenza totale di circa 4 W sarà, se necessario, raramente
richiesta.
9
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
L’architettura del sottosistema Power
Dopo aver discusso i requisiti di progetto e le richieste di energia elettrica da parte dei
sottosistemi del DTS, vediamo ora come è fatto il sottosistema Power.
Il sottosistema è progettato in maniera da fornire la potenza elettrica alle funzioni del
DTS in qualsiasi condizione di funzionamento, considerando che si deve simulare nel
miglior modo possibile una missione satellitare in orbita bassa (LEO). Il maggior
limite di cui si deve tenere conto è, come abbiamo già detto, l’illuminazione artificiale
al posto di quella solare: questo limite ha obbligato i progettisti a utilizzare la batteria
per alimentare la maggior parte delle utenze del DTS, lasciando ai pannelli solari il
solo compito di alimentare la ruota di inerzia del sottosistema ACS, quando i panneli
solari sono illuminati dalla luce della lampada alogena.
La batteria, che in un impiego spaziale dovrebbe essere ricaricata dai pannelli solari,
nel DTS è invece ricaricata da un alimentatore esterno.
Poiché la carica della batteria deve essere condotta entro stretti limiti di tensione e
corrente, un regolatore di carica batteria (BCR) è interposto tra l’alimentatore esterno
e la batteria ricaricabile in modo da fornire la tensione e la corrente richiesta durante
il processo di carica.
Il generatore solare, nel satellite vero e proprio, dovrebbe consistere in 5 pannelli
solari costituiti da celle all’arseniuro di gallio ma nel DTS, che ha uno scopo didattico,
consiste di 3 pannelli di celle solari di silicio policristallino, robusti ed economici,
anche se meno efficienti di quelli all’arseniuro di gallio
La scelta del numero dei pannelli è obbligata dal sistema di sospensione del DTS
(descritta in altro documento) mentre quella sulla tecnologia delle celle è stata
valutata in funzione delle condizione operative a cui andranno incontro, in primis
l’usura e l’utilizzo da parte di personale non esperto come gli studenti. Se ne parlerà in
dettaglio in un successivo paragrafo.
Le celle sono disposte in serie parallelo: ciascun pannello ha 2 stringhe in parallelo e
ciascuna stringa è costituita da 18 celle. Ogni pannello solare genera circa 16,8 V con
una corrente nominale di 0,27 A quando è illuminato con raggio incidente normale.
I 3 panelli all’interno del DTS sono collegati in parallelo con una connessione “OR” di
diodi a bassa caduta, per formare un “bus” del generatore solare, destinato, lo
ricordiamo, ad alimentare solamente la ruota di inerzia.
Entrambi i bus del generatore solare e di batteria esibiranno significative variazioni di
tensione durante il normale funzionamento. Infatti la tensione del generatore solare
dipende dalla temperatura di funzionamento, dall’angolo della luce incidente, dal tipo
di luce incidente (funzione della lampada solare utilizzata) e dalla corrente di carico.
La tensione della batteria, durante la scarica, varia con la profondità di scarica, con la
temperatura di funzionamento e dipende anche dalla storia dei precedenti cicli di
ricarica. La batteria ricaricabile impiegata è di tipo Li-ion che consente di avere alta
efficienza, elevata resistenza verso condizioni di carico e vasto campo di temperatura
operativa.
10
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
I convertitori DC/DC sono componenti che, alimentati da un bus primario non
regolato, generano, attraverso una conversione PWM (Pulse Width Modulation,
Modulazione ad Ampiezza degli Impulsi) ad alta efficienza, le tensioni secondarie
stabilizzate e regolate richieste per il funzionamento del dimostratore tecnologico
satellitare.
La tabella 3 già presentata in precedenza mostra che il consumo di ciascun
sottosistema è relativamente basso. Sulla base di questi valori è vantaggioso
centralizzare la conversione di potenza in un numero minimo di convertitori DC/DC.
Questa scelta implica una distribuzione delle tensioni secondarie ai diversi circuiti dei
sottosistemi.
Questa soluzione è inoltre adottata tenendo conto dei seguenti aspetti:
•
I sottosistemi non richiedono nessun comando di ON/OFF.
•
Nessun isolamento galvanico è richiesto per mitigare aspetti di compatibilità
elettromagnetica. I circuiti sono allocati in piccolo spazio con ridotto percorso di
collegamenti e con un accurato controllo della messa a terra (grounding).
•
Una distribuzione a stella minimizza le perturbazioni introdotte dalle cadute
resistive sulle linee di collegamento.
Ne consegue che per ottimizzare le interfacce, le tensioni secondarie richieste dai
circuiti dei sottosistemi sono state limitate a due valori, +5 V dc e +15 V dc.
Per flessibilità di progetto, i due valori di tensione sono ottenute con due distinti
convertitori DC/DC. Tuttavia, sulla base di quanto sopra considerato, l’impiego di un
unico convertitore multi-uscita può essere vantaggioso per la riduzione degli ingombri
e peso.
La figura 3 mostra quale dovrebbe essere lo schema a blocchi del sottosistema di
potenza se il generatore solare fosse illuminato dalla luce del Sole.
Poiché l’attuale generatore solare impiegato nel DTS è in grado di fornire massimo 4W
contro i 10W richiesti, è evidente che esso non sarà in grado di fornire l’energia per la
carica della batteria attraverso il BCR.
Pertanto, al solo scopo dimostrativo, l’energia del generatore solare sarà utilizzata per
fornire l’alimentazione ad un solo convertitore DC/DC (+15V) che, in questa
applicazione, è impiegato per alimentare la ruota di inerzia del sottosistema ACS
(controllo di assetto). In assenza di luce, la ruota sarà alimentata dalla batteria.
11
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Figura 3 – Lo schema del DTS, se fosse illuminato dal Sole
Il convertitore DC/DC a +15 V è collegato direttamente al generatore solare e alla
batteria attraverso un regolatore serie a bassa caduta (LDO). Questo opera in
condizioni di quasi saturazione, in modo da seguire la tensione di batteria fin tanto
che la tensione del generatore solare è inferiore a 10 V. Per valori superiori a 10 V il
generatore solare comincia ad fornire energia fino ad escludere quella di batteria.
L’implementazione del regolatore serie permette di visualizzare immediatamente lo
squilibrio energetico tra batteria e generatore solare. L’energia fornita dal generatore
solare dipende dal livello di carica della batteria e l’attuale generatore solare non è in
grado di fornire l’energia né quando la tensione della batteria è al massimo né quando
la batteria è scarica e quindi la sua ricarica richiederebbe la massima corrente.
Pertanto, il punto di scambio energetico può richiedere lunghi tempi di attesa che non
sono compatibili con la didattica
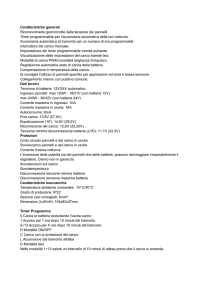
La figura 4 mostra la configurazione del sottosistema Power modificato per la
didattica.
12
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Figura 4 – Lo schema del DTS per l’uso didattico con illuminazione artificiale
Il carica batteria, che non può più essere alimentato dal generatore solare, sarà
alimentato dall’esterno attraverso un connettore accessibile sul pannello del DTS. La
tensione di ingresso tipica è di 24 Vdc con corrente di 2,5 A, fornita da un alimentatore
esterno collegato alla rete a 220 V e 50 Hz. Questo consente una carica rapida ed
ottimale della batteria, fondamentale per avere un sistema sempre efficiente durante
le esercitazioni in laboratorio.
Un interruttore a due vie, tre posizioni, montato su uno dei pannelli esterni, mostrato
nel pannellino a sinistra della figura, consente le seguenti configurazioni:
1. messa in OFF (spento) con mancata alimentazione esterna al BCR e isolamento
della batteria rispetto ai circuiti del DTS: è la posizione centrale degli interruttori
2. alimentazione esterna al BCR per la carica della batteria con isolamento dei
circuiti del DTS: è la posizione superiore degli interruttori
3. alimentazione esterna al BCR per la carica della batteria con alimentazione dei
circuiti del DTS attraverso la batteria: è la posizione inferiore degli interruttori.
13
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
4. Requisiti e criteri di scelta della batteria e dei pannelli solari
4.1
Le funzioni dei generatori elettrici del DTS
I generatori elettrici impiegati dal sottosistema Power sono:
•
la batteria ricaricabile
•
i pannelli solari.
Durante le fasi di esercitazioni in laboratorio viene impiegata la batteria per fornire
energia alle seguenti funzioni del DTS:
•
acquisizione e aggiornamento delle telemetrie
•
controllo dell’assetto del satellite
•
ricezione e distribuzione di comandi.
Nel caso di un reale funzionamento in orbita, la batteria sarebbe impiegata nelle
seguenti condizioni:
•
durante le eclissi (satellite completamente nell’ombra della Terra)
•
quando il satellite fosse in penombra (parziale ombra della Terra)
•
quando fosse richiesta più potenza di quella fornita da pannelli solari (che è il caso
anche durante le esercitazioni di laboratorio)
•
in caso di guasto di alcune celle solari
•
per immagazzinare l’eccesso di energia fornita dai pannelli solari.
La batteria deve inoltre avere un ampio limite di temperatura operativa, peso e
dimensioni più bassi possibili.
I pannelli solari, invece, vengono utilizzati nel DTS solo a scopo educativo per spiegare
l'effetto fotovoltaico e per alimentare la ruota di inerzia.
Nel caso di reale funzionamento in orbita, quando il satellite si trovasse nella piena
luce del Sole, i pannelli solari dovrebbero provvedere alla generazione di potenza
durante la fase di illuminamento del satellite, caricando la batteria ed alimentando i
vari sottosistemi di bordo.
Nei paragrafi che seguono descriveremo i criteri di progetto e la configurazione di
questi due componenti del sottosistema di alimentazione.
14
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
I criteri di scelta del tipo di batteria
Come abbiamo già detto nel precedente paragrafo, le batterie impiegate su un satellite
in orbita immagazzinano energia durante la fase di illuminazione solare per poi
consentire il funzionamento anche durante la fase di eclisse.
Perciò una scelta oculata del tipo di batteria da impiegare è molto importante.
Attualmente esistono tre tipi predominanti di batterie ricaricabili:
•
NiCd (batterie al Nikel – Cadmio)
•
NiMH (batterie al Nikel – Metallo Idruro)
•
Li-Ion (batterie a ioni di Litio)
Sebbene le batterie NiCd siano state generalmente impiegate per applicazioni spaziali
per la loro robustezza e alto numero di cicli di carica/scarica, la loro densità di energia,
cioè l’energia fornibile per unità di massa, è relativamente modesta. Per l’impiego su
di un piccolo satellite, le batterie NiCd sarebbero troppo pesanti e voluminose.
Le batterie NiMH, oggi ampiamente usate in ambito commerciale al posto delle
batterie al NiCd, hanno una migliore densità di energia ma sono ancora troppo
pesanti.
Si è pertanto deciso di impiegare nel DTS le batterie Li-Ion poiché sono, allo stato
attuale della tecnologia, le più leggere a parità di energia fornita.
Una variante della tecnologia Li-Ion è quella chiamata Li-Ion Polymer, in italiano
litio-polimero, che ha caratteristiche simili alle Li-Ion, ma offre una densità energetica
maggiore di oltre il 20% rispetto ad una Li-Ion classica, al prezzo di un ciclo di vita
leggermente più breve.
Una batteria Li-Ion Polymer è costituita da materiali compositi litio-polimero
conduttori, ottenuti inglobando soluzioni di sali di litio in opportune matrici di
sostanze polimeriche; ha il grande vantaggio di permettere la realizzazione di batterie
di qualsiasi forma e dimensione, e anche più sicure, in quanto l'elettrolita allo stato
solido in caso di rottura accidentale delle batterie non può fuoriuscire.
Le tabelle 4 e 5 che seguono permettono di paragonare i parametri fondamentali delle
quattro tecnologie di cui abbiamo parlato.
Come si può vedere, le batterie Li-Ion, e in particolare le Li-Ion Polymer, hanno
specifiche e prestazioni migliori.
15
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
PARAMETRO
NiCd
NiMH
Li-Ion Polymer
Li-Ion
30-40
50-60
110-150
90-120
120-150
180-220
280-320
260-300
Tensione di cella [V]
1.2
1.25
3.6
3.6
Ciclo-vita (80% della capacità iniziale)
500
500
500
500
Auto-scarica (% mese)
15
20
6
6
Effetto Memoria
Si
Incerta
No
No
Modesta
Ridotta
Ridotta
Molto ridotta
Facilità di ricarica
Sì
Sì
Modesta
Modesta
Curva di scarica
Pendenza fino
a 60-80%
(<3C)
Pendenza fino
a 60-80%
(<2C)
Relativamente
piatta 20-80%
(<1C)
Relativamente
piatta 20-80%
(<2C)
100-200
150-250
300-400
150-250
da -10 a +50
da -10 a +50
da -20 a +60
da -20 a +60
da ½ a 1
da 2 a 3
da 3 a 6
da 3 a 6
Densità d’Energia vs. massa [Wh/Kg]
Densità d’Energia vs. volume [Wh/dm3]
Tolleranza alla sovracarica
Resistenza interna @ 25°C (mΩ)
Temperatura operativa [°C]
Tempo di carica rapida [Ore]
Tabella 4 – Caratteristiche di batterie ricaricabili
16
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
TIPO BATTERIA
NiCd
VANTAGGI
•
•
•
•
Li-Ion
•
•
•
•
•
•
NiMH
•
•
SVANTAGGI
Tecnologia sicura e vastamente
impiegata per missioni
spaziali.
Fornisce alti valori di corrente
con una rapida capacità di
ricarica.
Alta tolleranza alla sovraccarica e
capacità di sostenere sopra
1000 cicli di ricarica
Costo relativamente basso
•
•
•
Soggetto all’effetto Memoria
Tensione bassa
Densità di energia non
particolarmente elevata
Alta densità d’energia.
Leggera
Nessun effetto Memoria
Capacità di operare in un ampio
intervallo di temperatura
Modesto riscaldamento durante
la ricarica
Cicli di ricarica 500-1000
•
•
Tecnologia delicata
Suscettibilità alla sovratensione e
danno per scariche profonde
Costo elevato
Richiesta di maggiore
documentazione per la
sicurezza
Capacità di carica 30-40%
maggiore rispetto a NiCd per i
primi cicli di ricarica
Nessun effetto Memoria
•
•
•
•
•
•
Cicli di vita ridotti e limitazione di
carico.
Maggiore riscaldamento generato
durante la fase di ricarica
rispetto a NiCd
Richiesta di carica più complessa
per prevenire danni da
surriscaldamento o
sovracarica
Tempi di ricarica maggiori
rispetto a NiCd
Tabella 5 – Paragone delle prestazioni delle batterie ricaricabili
17
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
4.2
Le caratteristiche della batteria del DTS
Nel DTS è viene utilizzata una batteria ricaricabile a Ioni di Litio, con le
caratteristiche specificate nelle tabella 6 e 7 che seguono:
Caratteristica
Descrizione
Note
Tipo
Li-Ion
Batteria a ioni di Litio
Numero di celle
12
Configurazione
Serie-parallelo (4S-3P)
4 pacchi di batterie connesse in
serie. Ogni pacco è costituito da 3
batterie collegate in parallelo (vedi
anche figure 4 e 5)
Dimensioni [mm]
135 x 80 x 45
Incluso contenitore di protezione
Peso [gr]
820
Incluso contenitore di protezione
Capacità [Ah]
5,8
Protezioni elettriche
Fusibile
7A
Circuito Elettronico
5A
Fusibile ripristinabile
Polyswitch
Protezione contro l’inversione di
polarità
Diodo di bypass
Su ciascuna cella. Si tratta di
fusibili
ripristinabili,
di
tipo
chimico, basati su un particolare
polimero, che agiscono come
degli interruttori automatici
Tabella 6: Caratteristiche generali della batteria
18
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Parametro
Unità
Valori
Minimo
Nominale
Massimo
Tensione
V
11,2
14,4
16,8
Tensione di cut-off
V
10,0
11,2
12,0
Temperatura di carica
°C
0
20
40
Temperatura di scarica
°C
-10
20
50
Temperatura di
immagazzinamento (max. 12
mesi)
°C
-20
20
30
Corrente di scarica
mA
-
0,4
3
Capacità
Ah
5,8
Tabella 5 : Caratteristiche elettriche della batteria
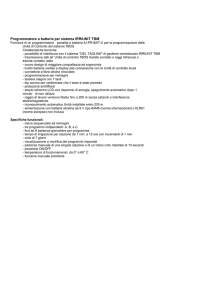
La batteria ricaricabile ioni di litio-polimero. che deve fornire, lo ricordiamo ancora,
energia al DTS durante le esercitazioni di laboratorio, è costituita da quattro gruppi di
celle collegate in serie (4S-3P) per ottenere una tensione a fine carica di 16,8 V con una
capacità di 5,8 Ah. Ciascun gruppo consiste di tre celle collegate in parallelo.
La figura 5 mostra lo schema di collegamento elettrico del pacco batterie Li-Ion.
La figura 6 mostra la fotografia del pacco batterie impiegato per il DTS.
Figura 5: Schema elettrico del pacco batteria
19
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Figura 6 –fotografia del pacco batteria del DTS
La batteria è intenzionalmente sovradimensionata (rispetto ai requisiti minimi
richiesti) allo scopo di fornire maggiore autonomia durante le esercitazioni. Questa
batteria funziona come unica fonte di generazione di potenza a bordo ed è caricata
dalla rete elettrica esterna mediante il BCR (Battery Charge Regulator)
Per un funzionamento nominale del DTS, considerando 1 ora di esercitazione, la
profondità di scarica è prevista entro il 10% con una variazione entro 1 V della
tensione nominale che varia quindi da 16 V a 15 V. Può comunque accadere di
ottenere profondità di scarica anche oltre il 70%; questo non compromette il
funzionamento del DTS ma, purtroppo, riduce il tempo di vita della batteria, che si
misura nel numero massimo di cicli di carica e scarica che la batteria può tollerare
prima di degradarsi.
Allo scopo di incrementare la vita della batteria, il pacco è fornito con un circuito di
protezione da sovracorrenti, inversione di polarizzazione e scariche profonde. Questo
circuito è basato su un microchip commerciale progettato allo scopo di misurare la
tensione istantanea di ciascun gruppo di celle e fornire, di conseguenza, la
ridistribuzione della corrente di carica e scarica (attraverso regolatori shunt) tra i
quattro gruppi di celle nell’obiettivo di minimizzare la possibile differenza di tensione
tra i gruppi. E’ previsto anche un relè termico per prevenire surriscaldamenti in
condizioni particolari di utilizzo.
Un’ulteriore misura per la sicurezza della batteria è il controllo del valore di
sottotensione che provvederà a disconnettere temporaneamente i carichi. Comunque,
prima di raggiungere la disconnessione della batteria, un circuito rivela e segnala al
20
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
processore di bordo, cioè al sottosistema OBDH, che la tensione della batteria è scesa a
un valore troppo basso. Il successivo riavvio potrà avvenire solo manualmente,
mediante interruttore esterno, e solo dopo aver ricaricato la batteria.
4.3
Le prestazioni della batteria del DTS
Il bilancio energetico della batteria, e quindi l’autonomia del DTS, è stato calcolato
prendendo in considerazione il caso peggiore, ossia quando tutte le utenze sono in
funzione (COMMS, ACS e OBDH accesi). Il tempo di funzionamento previsto è pari ad
un'ora, cioè 3600 minuti secondi, di esercitazione in laboratorio.
Numero
Utilizzatore
Potenza [W]
Tempo [s]
Energia [J]
1
OBDH
0,1
3600
360
2
COMMS
0,1
3600
360
3
ACS (a regime)
0,6
3600
2160
4
POWER
0,2
3600
720
TOTALE
-
-
3600
Tabella 8 – Bilancio energetico della batteria del DTS
L’energia è calcolata con la seguente formula:
E [ J ] = P [ W ] ⋅ t [ s]
Se si considera un’efficienza totale per il convertitore di η=75%, la minima potenza
disponibile sarà:
Etotale =
E 3600
=
= 4800 [J]
η
0.75
La batteria pienamente carica può fornire una energia di:
(V max − V min ) [ V ] ⋅ C [ Ah ]
(16.8 − 10 ) [ V ] ⋅ 5.8 [ Ah ]
EBAT =
⋅ 3600 [ s] =
⋅ 3600 [ s] = 70992 [ J ]
2
2
dove Vmax e Vmin sono i limiti di variazione della tensione di batteria Li-Ion e C è la
capacità della batteria.
Ne consegue un numero di celle di batterie pari a:
Etotale
4800
n = cella
= cella
= cella ⋅ ( 0.0676 ) < <1
EBAT
70992
Da questo risultato si osserva come una cella di batteria sia in grado di fornire
sufficiente energia per una intera esercitazione senza dover essere ricaricata.
Se ogni carico fosse disattivato, eccetto i sottosistemi OBDH e COMMS, l’energia
consumata, includendo le perdite nel sottosistema Power, sarebbe:
21
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
EUSER = EOBDH + ECOMMS = 1440 [ J ]
In caso di disattivazione del controllo di assetto, la batteria è in grado di assicurare
l’energia al ai due sottosistemi per un tempo totale pari a:
tscarica =
EBATT
70992 [ J ]
⋅ 100 =
⋅ 100 [ min ] = 4930 [ min ] → 82 ore
EUSER
1440 [ J ]
22
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Le caratteristiche dei pannelli solari
I pannelli solari sono costituiti da celle solari (semiconduttori che convertono la luce
solare direttamente in elettricità). Queste sono connesse in serie/parallelo per ottenere
la tensione e la corrente di uscita richieste dal DTS. Gli elementi che compongono i
pannelli solari sono identificati con le denominazioni seguenti:
•
cella: la singola cella solare, così come la fornisce direttamente il produttore
•
stringa: più celle collegate elettricamente in serie
•
pannello: più stringhe collegate elettricamente in parallelo
Il DTS ha 3 pannelli su altrettante pareti del cubo che ne costituisce la struttura. Le
celle solari di un satellite in orbita terrestre, quando sono illuminate, vengono
normalmente utilizzate per alimentare le utenze del satellite e per ricaricare la
batteria. Nel caso del DTS, che viene fatto funzionare in un laboratorio scolastico con
luce artificiale, la potenza erogata dai pannelli solari non è sufficiente ad alimentare il
dimostratore.
Vediamo come sono fatti i pannelli solari del DTS e poi, alla fine del paragrafo,
torneremo sul problema delle limitazioni dovute all’uso della luce artificiale
Figura 7 - Schema complessivo di collegamento dei 3 pannelli solari
23
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Figura 8 – fotografia di un pannello solare usato sul DTS
Come si vede dallo schema elettrico della figura 7, e come si può quindi osservare nella
fotografia della figura 8, ogni pannello solare è costituito da celle di silicio poli­
cristallino, collegate in serie e parallelo a formare due stringhe da 18 celle cadauna. Le
stringhe sono state realizzate direttamente dal produttore e quindi sempre dal
costruttore protette mediante laminazione fra un foglio di etilene vinil-acetato sulla
faccia posteriore, e vetro temperato sulla parte anteriore che deve essere esposta alla
luce .
L’utilizzo di questo tipo di celle e di laminazione, pur non essendo completamente
rappresentativo dei pannelli solari normalmente utilizzati nello spazio, è essenziale ai
fini del progetto didattico.
24
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Infatti, i pannelli verranno maneggiati da studenti, e quindi una copertura in vetro
temperato garantisce una maggiore robustezza e una miglior resistenza all’usura. Per
le stesse ragioni, l’uso di celle solari di silicio policristallino, che non sono le più
efficienti oggi disponibili sul mercato, non soltanto garantisce una minor degradazione
delle prestazioni nel tempo ma, in caso di rottura dovuta a urti accidentali, garantisce
una facile reperibilità di pezzi di ricambio.
Per garantire dei livelli di affidabilità compatibili con quelli richiesti dal progetto, la
casa costruttrice ha eseguito i seguenti test sui pannelli:
•
cicli termici fra -40°C e +85°C;
•
simulazione di impatto da parte di un oggetto di 25 mm di diametro con velocità di
23 m/s;
•
esposizione per più di 1000 ore a 85°C;
•
test di “hot-spot”.
Le caratteristiche tecniche di ogni pannello sono riassunte nella tabella 9 che segue:
Parametro
Unità
Valore
Potenza massima
W
4,5
Tensione a Pmax (Vmp)
V
16,8
Corrente a Pmax (Imp)
A
0,27
Potenza minima garantita
W
4
Corrente di corto circuito Isc
A
0,29
Tensione a circuito aperto Voc
V
20,6
Coefficiente di Temperatura per Voc
mV/°C
-80 ± 10
Coefficiente di Temperatura per Ioc
%/°C
0,065 ± 0,015
Coefficiente di Temperatura per P
%/°C
-0,5 ± 0,05
Temperatura di funzionamento nominale delle celle
°C
47 ± 2
Peso
Kg
0,77
Altezza
mm
240
Larghezza
mm
265
Spessore
mm
3
Tabella 9 – Caratteristiche tecniche del pannello solare
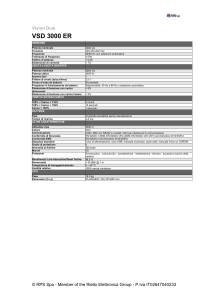
I diagrammi che seguono mostrano la variazione delle caratteristiche tensionecorrente del pannello solare nelle diverse condizioni di temperatura e illuminazione, e
precisamente:
•
la figura 9 al variare della temperatura
25
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
•
la figura 10 al variare della potenza luminosa incidente
•
la figura 11 mostra la risposta spettrale di una cella di silicio policristallino.
Figura 9 – Diagramma I-V al variare della temperatura
26
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Figura 10 – Risposta del pannello solare al variare della luce incidente
Figura 11 – Risposta spettrale di una cella solare di silicio policristallino
27
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Nel laboratorio scolastico verrà utilizzata una fonte luminosa da 650 W con una
lampada alogena prodotta dalla OSRAM, la quale produce un flusso luminoso ad una
temperatura di colore di 3400 °K, mentre la temperatura di colore del Sole è pari a
6500 °K. A questo proposito si deve osservare che non solo la potenza luminosa
erogata dalla lampada sulla superficie dei pannelli solari è inferiore a quella che
verrebbe erogata dal Sole, ma anche lo spettro della luce è diverso; la temperatura di
colore della lampada, molto inferiore a quella del Sole (che è di circa 6500 °K) fa sì che
la luce della lampada sia molto più ricca di infrarosso della luce solare.
Poiché le celle solari sono molto più sensibili alle radiazioni visibili che a quelle
infrarosse, il loro rendimento quando sono illuminate da una lampada a incandescenza
è notevolmente più basso a quello che avrebbero con la luce del Sole.
Si dovrebbe anche tenere conto che la lampada è alimentata alla tensione alternata di
220 V , 50 Hz; e questo tipo di alimentazione produce comunque una ondulazione
dell’intensità luminosa alla frequenza di 50 Hz e quindi una corrispondente
ondulazione nella corrente di uscita delle celle solari. Tuttavia l’inerzia termica del
filamento agisce da filtro, riducendo l’ondulazione ad un valore residuo pari a circa lo
0,1 %; il circuito di controllo del convertitore DC/DC a 15 V provvede ad attenuarla
ulteriormente.
5. Il sistema di distribuzione della potenza
Allo scopo di allungare la vita delle batterie e valorizzare le funzioni del “satellite”, la
distribuzione elettronica è progettata per prevenire guasti critici all’utilizzo didattico
se sorgesse qualche problema, come ad esempio corto-circuiti che potrebbero
danneggiare definitivamente tutto il sottosistema di distribuzione e generazione.
Con riferimento alla configurazione didattica della Figura 4, l’alta efficienza dei
regolatori di tensione aggiusta le tensioni al sistema per le diverse necessità del
“satellite”.
Un interruttore elettromeccanico, già descritto nel paragrafo 7, è interposto tra la
batteria e il ritorno (GND). Questo interruttore è predisposto nello stato di circuito
aperto durante la fase di stivaggio e si chiuderà quando verrà acceso il DTS. Il suo
scopo è quello di mantenere il dimostratore tecnologico nello stato non energizzato
durante i lunghi periodi di non funzionamento per evitare che la batteria si scarichi
oltre il livello minimo consentito.
6. Il sistema di carica della batteria mediante rete esterna
Il caricabatteria (BCR) è alimentato da una sorgente esterna e assicura cicli di carica
completi. Questo permette un aumento dell’autonomia della batteria e, allo stesso
tempo, un aumento della vita utile (ossia un aumento dei cicli di carica e scarica).
Il caricabatterie fa parte del sottosistema Power ed è completamente compatibile con il
pacco batteria del DTS.
L’alimentatore esterno è destinato ad essere usato solo in luoghi chiusi. Ha una
interfaccia con la presa di corrente della rete domestica (220 V, 50 Hz) e fornisce un
tensione continua di 24 V con una corrente di 2,5 A.
28
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
7. Il sistema di gestione della potenza
7.1
Premessa
La funzione dei regolatori di potenza è quella di assicurare che un'adeguata potenza
elettrica sia distribuita ai sottosistemi. La regolazione della potenza consiste di
numerosi componenti, che possono essere, in linea di principio, raggruppati in due
tipologie:
•
una combinazione di sensori di tensione e corrente per monitorare il sistema; i
relativi dati, elaborati da parte dell’OBDH, permettono di formulare una
“strategia” della distribuzione della potenza
•
circuiti di conversione che regolano la potenza erogata ciascun sottosistema. Il
metodo di conversione può avvenire in modo lineare attraverso regolatori serie,
oppure a commutazione (switching) attraverso convertitori DC/DC. Rientra nel
sistema di regolazione della potenza anche la funzione del carica-batteria.
Il regolatori switching offrono tre principali vantaggi rispetto a quelli lineari.
•
Il rendimento è maggiore
•
poiché l’energia persa nel trasferimento ingresso/uscita è minore, sono richiesti
componenti più piccoli con ridotta dissipazione termica
•
l’energia immagazzinata dall’induttore nel regolatore switching può essere
trasformata per ottenere tensioni di uscita che possono essere più alte di quelle
d’ingresso, possono essere negative o anche essere trasferite attraverso un
trasformatore per realizzare un isolamento elettrico rispetto alla tensione
d’ingresso (isolamento che non è presente nei normali regolatori switching).
Dati i vantaggi del regolatore switching, ci si potrebbe chiedere dove possono essere
impiegati i regolatori lineari che forniscono un rumore più basso e una banda larga; la
loro semplicità può qualche volta offrire una soluzione meno costosa.
I regolatori switching hanno comunque degli svantaggi: possono essere elettricamente
“rumorosi” e richiedono comunque dei circuiti di controllo per la gestione dell’energia.
La soluzione dei problemi di controllo è oggi fornita dai circuiti integrati specializzati
(switching-mode controller chips).
7.2
I convertitori DC/DC
La potenza fornita dai pannelli solari e dalla batteria è trasferita ai convertitori
DC/DC che convertono la sorgente di corrente continua da una tensione continua non
regolata del pannello solare e/o batteria a un'altra tensione continua, regolata,
richiesta dalle unità.
La conversione avviene con alta efficienza riducendo così gli effetti termici legati alla
dissipazione di potenza e riducendo il peso e l’ingombro delle sorgenti di energia. La
figura 12 mostra come in un convertitore DC/DC la potenza assorbita sia quasi
costante al variare della tensione d’ingresso.
29
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Vin
11V÷19.98
V
Vi
n
Vou
t
Vout
+5V
+15
V
CONVERTITORE
DC/DC
N°1
I
CONVERTITORE
DC/DC
N°2
P=VxI = Costante
Ideale
Reale
P
I =V/R
If(R)
P
Vf(R)
V
Figura 12 – Potenza d’ingresso costante in funzione di Vin in un convertitore DC/DC
Come già descritto nel paragrafo 7, allo scopo di ottimizzare le interfacce, le tensioni
principali richieste dai circuiti dei sottosistemi sono state limitate a due valori, +5Vdc
e +15Vdc. La relativa potenza è fornita per queste due tensioni è centralizzata da due
convertitori DC/DC con le caratteristiche mostrate in tabella 10
I convertitori DC/DC sono alimentatori switching che tipicamente compiono la
conversione applicando tensione continua DC su un induttore per un periodo di tempo
(di solito in una gamma di frequenza da 100 kHz a 5 MHz) durante il quale scorre una
corrente elettrica così da immagazzinare nell’induttore stesso energia magnetica;
quando viene tolta la tensione l'energia immagazzinata, si trasferisce all’'uscita del
convertitore con una tensione di uscita controllata.
Agendo sul rapporto tra il tempo in cui scorre la corrente nell’induttore e quello in cui
non scorre, detto in inglese “duty-cycle”, la tensione d'uscita rimane regolata anche se
la corrente d'uscita cambia. Questo metodo di conversione è molto efficiente (compreso
tra 80% e 95%) a differenza del metodo lineare che dissipa potenza. La figura 13
mostra il principio di funzionamento del convertitore DC/DC secondo la topologia
chiamata “Buck”.
30
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
VL
Filtro passa basso
iL
id
+
+
Sw
vd
D
L
vL
(vd-vo)
A
0
iO
-
(-vo)
+
RLOAD
vO
C
-
t
B
-
iL
Ts
IL=I
0
(Vd − Vo ) ⋅ ton = Vo ⋅ ( Ts − ton )
O
ton
Vo ton
=
= D
Vd Ts
Vd ⋅ Id = Vo ⋅ Io
Io Vd 1
=
=
Id Vo D
iL
iL
+
vd
-
+
L
vL
t
toff
iO
-
+
C
vO
+
RLOAD
-
vd
-
L
vL
iO
+
C
-
+
vO
RLOAD
-
Figura 13 - Principio di funzionamento del convertitore DC/DC a tipologia Buck
Grazie all'elevata efficienza si aumenta la durata delle batterie dei dispositivi
portatili. Uno svantaggio dei convertitori a commutazione è il rumore elettrico
generato alle alte frequenze, che comunque può essere limitato con appositi filtri.
I convertitori DC-DC isolati si basano sullo stesso principio di funzionamento ma
mantengono ingresso e uscita isolati elettricamente fra di loro tramite un
trasformatore di isolamento. L’isolamento permette di avere differenze di tensione tra
ingresso e uscita anche notevoli, dell'ordine delle centinaia o migliaia di volt.
Le varie tipologie dei convertitori DC-DC possono generare varie combinazioni di
tensioni, a cui vengono attribuite diverse denominazioni, quali ad esempio: Buck o
step-down. Citiamo le più diffuse tipologie di convertitori:
•
Boost o step-up
•
Buck-boost
•
Inverter
•
Forward o a trasferimento diretto di energia
•
Flyback o a trasferimento con accumulo di energia
•
Push-pull
•
Half bridge
•
Ćuk
•
SEPIC
31
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
In generale, il termine "convertitore DC-DC" si riferisce a uno di questi convertitori a
commutazione. I convertitori DC-DC a commutazione sono disponibili con una grande
varietà di ingressi e uscite di tensioni fisse o variabili.
Per una conversione di potenza con tensione ingresso/uscita isolata le configurazioni
più diffuse sono quelle dette “Forward” o “Flyback” a seconda delle potenze richieste e
dei valori di tensione in uscita. La configurazione “Flyback” è utilizzata nei due
convertitori DC/DC del DTS
I due convertitori DC/DC del DTS sono sempre accesi e sono in grado di tollerare un
guasto permanente in uscita con un minimo di potenza assorbita, in modo da non
compromettere la capacità del sottosistema Power.
Un fusibile in serie alla batteria assicura l’isolamento contro un corto-circuito
permanente sul bus principale. Le tensioni secondarie sono distribuite direttamente ai
diversi circuiti attraverso linee non commutate. Ciascun convertitore è fornito di un
limitatore di corrente contro sovraccarico o corto-circuito in uscita.
Parametri
Convertitore
+5 V
+15 V
Tensione di ingresso
9 V÷36 V
9 V÷36 V
Corrente assorbita a vuoto
40 mA
25 mA
Start-up
9 V÷8 V
9 V÷8 V
Surge voltage @100ms
50 V
50 V
Tensione di uscita
+5 V
+15 V
Corrente di uscita max
1,0 A
0,8 A
Accuratezza
1%
1%
Regolazione vs. Vin
0,5%
0,2%
Regolazione vs. I-out (10÷100%)
0,5%
0,5%
Ripple e rumore (picco-picco)
100 mV pk-pk
50 mV pk-pk
Rendimento
81%
86%
Tabella 10 - Caratteristiche elettriche dei convertitori DC/DC
32
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
7.3
Il Caricabatteria
Il caricabatteria (BCR) è utilizzato per caricare controllare la tensione e corrente di
carica della batteria del DTS, a partire dai 20 V in corrente continua forniti da una
alimentatore esterno. La corrente di carica, non esistendo nel DTS la possibilità di
utilizzare anche i pannelli solari, è fissata a 2 A.
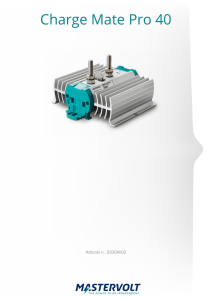
Come mostrato in figura 14 e tabella 11 associata, i cicli di carica sono:
•
Caricamento rapido: è una carica a corrente costante. In questa fase la corrente assorbita è
massima ed è fissata ad un valore di 2 A. L’accensione di un LED colore arancione visualizza
questa fase.
•
Carica finale: la corrente erogata è inferiore a quella massima e il suo modo di funzionamento è
a regolazione temporale. La tensione è costante e la batteria è carica tra l’80% ed il 95%.
Questa fase è visualizzata dal LED arancione spento.
•
Carica completata: l’intervallo temporale con carica a tensione costante è ultimato. La batteria è
completamente carica, non viene più erogata corrente di carica. Questa fase è visualizzata
dall’accensione di un LED giallo.
Tabella 11 – I cicli di carica della batteria
Figura 14 - Ciclo di carica della batteria
33
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Il carica batteria impiegato è basato sul componente Maxim MAX745, progettato
appositamente per il controllo della carica delle batterie di differenti tecnologie, tra cui
quelle a Ioni di Litio (figura 15).
La carica richiede inizialmente un profilo di controllo a corrente costante (CC) fino a
raggiungere la massima tensione di cella a 4.1 Volt a cella e, successivamente, una
fase di controllo a tensione costante (CV) durante la quale la corrente di carica
diminuisce gradualmente. Il microcircuito MAX745 permette il controllo completo
della corrente di carica e fornisce l’automatico passaggio da CC a CV. I differenti modi
di funzionamento sono visualizzati da due diodi LED di colore giallo e arancione
descritti in tabella 11. Inoltre, il carica batteria include una protezione di sotto­
tensione in ingresso la cui soglia è definita da un partitore resistivo.
34
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Figura 12 – Circuito integrato del controllore del carica batterie
35
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
8. Il sistema di monitoraggio (telemetria)
Il sistema di monitoraggio include le interfacce per l’acquisizione delle temperature in
diversi punti del satellite, dei valori di corrente e tensione sulle diverse linee di
distribuzione della potenza elettrica, e delle configurazioni di stato.
I segnali così generati forniscono le informazioni telemetriche che devono essere
acquisite dal sottosistema OBDH per poter poi essere trasmesse a terra. Alcuni
segnali sono utilizzati anche a bordo come segnali di sicurezza. Per le informazioni
complete sulle telemetrie del sottosistema Power si rimanda al documento dedicato
“Le telemetrie del DTS”. In questo capitolo non si parla in dettaglio neanche dei
sensori di corrente e di tensione, per i quali si rimanda al documento sulle telemetrie
già citato.
8.1
I sensori di temperatura
I sensori di temperatura sono costituiti da circuiti integrati tipo LM135 (vedi figura
16). L’uscita del dispositivo può essere espressa come:
VthT = VthTo ⋅
T
To
dove T è il valore sconosciuto della temperatura e To è la temperatura di riferimento,
entrambi espressi in gradi Kelvin. Nominalmente l’uscita è calibrata a 10 mV/°K
Ciascun dispositivo è connesso ad un amplificatore operazionale come mostrato in
figura.
+5V
R2
R5
LM135
Vth
Vref
R4
+
-
R3
Vout
Figura 13 – Circuito di interfaccia del sensore di temperatura
Il valore Vth dipende da Vref come mostrato nell’equazione (1).
Il valore Vth ottenuto dalla equazione (2) consente di determinare il valore della
temperatura T in accordo alla equazione (3).
R4
R3 + R 4
Vout = − Vref ⋅
+ Vth·
R3
R3
(1)
R4
Vout + Vref ⋅
R3
Vth =
R3 + R 4
R3
(2)
36
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
T=
(Vth −
2.98V )
+ 25° C
0.01
(3)
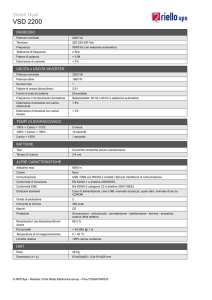
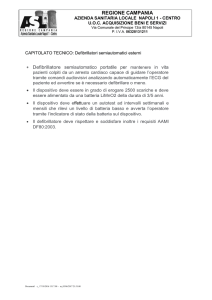
La figura 17 mostra la caratteristica del trasduttore di temperatura nell’intervallo tra
–30°C e +80°C.
La tensione di riferimento Vref è ottenuta dall’aggiustamento della tensione su un
preciso regolatore di tensione.
3.27
TLM:TENSIONE di USCITA
[V]
TEMP_TLM NEW.CIR
5.000
+80°C
4.000
3.000
+25°C
2.000
1.000
-30°C
0.000
v(3)
2.400
2.682
2.980
3.278
-33°C
-4.8°C
25°C
54.8°C
TEMPERATURA [°C]
USCITA [V]
figura 17 - Caratteristica del trasduttore di temperatura
37
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
v(6)
3.576 3.600
84.6°C
figura 18 – sensore di temperatura
38
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
tabella 12 - Caratteristiche elettriche del sensore di temperatura
39
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Sensori di corrente
Si veda il documento sulle telemetrie del DTS
8.2
Diagnostica dello stato della batteria
Oltre alle informazioni analogiche di corrente e tensione della batteria, il sistema di
monitoraggio fornisce dei livelli logici rappresentativi dello stato della batteria. Queste
informazioni costituiscono la telemetria di stato del sottosistema Power.
Attraverso la combinazione di due stati logici è possibile determinare le condizioni
operative definite in tabella 11, che oltre a essere acquisite dall’OBDH sono anche
visualizzate da diodi LED come descritto sempre nella tabella 11.
Gli stati logici sono rappresentativi dei seguenti segnali:
•
IBAT: Corrente di carica/scarica di batteria. In riferimento allo schema di figura
19, il comparatore U11D fornisce direttamente lo stato logico di carica/scarica
comparando direttamente il segnale analogico con una tensione di riferimento di
2.5V (Iscarica=1; Icarica=0).
•
VBAT: Tensione di batteria (>12V=1; <12V=0). In riferimento alla figura 19, il
comparatore U11A fornisce direttamente lo stato logico della tensione di batteria
comparando direttamente il segnale analogico con una tensione di riferimento di
2.5V.
•
Modalità operativa del carica batteria (BCR). In riferimento alla figura 19 viene
fornito il seguente stato (1=CC; 0=CV).
Il circuito di figura 18 modellizza la logica delle telemetrie di stato sviluppata con i
circuiti analogici. Il circuito di figura 19 mostra il modello analogico di simulazione su
computer, e la figura 20 i risultati della simulazione.
BIT 1
1 : CC
BCR 0 : CV
IBAT
VBAT
BIT 2
1 : SCARICA
0 : CARICA
1: >12V
0: <12V
figura 18 - Logica delle telemetrie di stato del sottosistema power
40
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Condizioni operative del
sottosistema Power
bit 1
bit 2
Batteria operativa @ >12V
0
0
Batteria scarica @ <12V
0
1
Batteria in carica (CC)
1
0
Batteria in carica (CV)
1
1
Tabella 6: Informazioni di stato del sottosistema Power
LED
Definizione
Acceso
Spento
Blu
Stato operativo del
sottosistema di
power
Distribuzione
alimentazione
OK
Distribuzione
alimentazione
NOT-OK
Rosso
Stato Tensione di
Batteria
LED
lampeggiante=
Tensione di
batteria <12V
Tensione di
batteria >12V
Giallo
Stato della
corrente di carica
della Batteria
IBAT<corrente di
carica rapida
IBAT=corrente di
carica rapida
Arancione
Stato operativo del
Carica Batterie
(BCR)
BCR operante in
modalità di
carica rapida con
controllo in
corrente (CC)
BCR operante in
modalità di
carica di
mantenimento
con controllo in
tensione (CV)
Note
Quando acceso, indica che la
corrente di carica rapida di
batteria è scesa sotto la soglia di
1,6 A definita dal valore R70 =
8.2KΩ. Il segnale di uscita IBAT
sul pin 1 di U14 è proporzionale
alla corrente di carico, e il
comparatore U15 rivela quando
la corrente di carico supera
1.182V. R70 è scelto per
assicurare che la tensione in
uscita dal segnale IBAT non
superi il valore di 2V sotto la
massima corrente di carico.
Tabella 7 : Visualizzazione dello stato del sottosistema power via LED
41
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
figura 19 - Modello di simulazione su PC della logica delle telemetrie
figura 20 – Temporizzazione della simulazione della logica delle telemetrie
42
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
9. Aspetti tecnologici e realizzazione
Il generatore solare è montato all’esterno della struttura del DTS; gli altri componenti
del sottosistema di power sono montati all’interno del DTS in una locazione ben
determinata dalla struttura del sottosistema.
Il sottosistema di power è realizzato su una scheda a circuito stampato di dimensioni
97 x 72 mm con componenti montati su ambo i lati. Come tecnologia di montaggio si è
cercato di utilizzare quanto più possibile la trecnologia denominata SMD (Surface
Mounted Devices, Dispositivi a Montaggio Superficiale).
Il circuito stampato interfaccia con la struttura del “satellite” con i seguenti connettori:
Simbolo
Tipo
Utilizzo
J2
Connettore 30 piedini, cavo
flessibile
Telemetrie
JP2
Connettore maschio a 8 piedini
Ingresso Alimentazione
P1
Connettore maschio a 2 piedini
Ingresso Alimentazione Locale
P2
Connettore femmina volante a 4
piedini
Uscita Alimentazione
Tabella 15 – I connettori del circuito stampato del sottosistema Power
43
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Piedino
Assegnazione
1
PWR_TEMP_S/A
2
CURRENT_S/A_PWR
3
CURRENT_S/A_RF
4
CURRENT_S/A_OBDH
5
VOLTAGE_S/A
6
BATTERY_CURRENT
7
BATTERY_VOLTAGE
8
DC/DC_5V_CURRENT
9
DC/DC_15V_CURRENT
10
11
12
13
14
15
15
17
18
19
20
21
22
23
24
25
26
27
PWR_STATUS-2
28
PWR_STATUS-1
29
30
Tabella 16 – Assegnazione dei piedini del connettore J2
44
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
figura 21 – Il pannello solare usato sul DTS
45
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Figura 22 – Circuito stampato del sottosistema Power – lato superiore
Figura 23 – Circuito stampato del sottosistema Power – lato inferiore
46
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati
Documento:
Il Sottosistema Power del Dimostratore Tecnologico Satellitare (DTS)
Testi:
Rodolfo Gamberale
Luciano Turrini
Illustrazioni:
Rodolfo Gamberale
Luciano Turrini
47
www.edusat.it
Questo documento contiene informazioni proprietarie IMT srl - Tutti i diritti riservati