ABB Sace
ABB AC Brushless Servodrives
Servo azionamenti IMC
Manuale di Installazione IMC-A
ABB AC Brushless Servodrives
Servo azionamenti IMC
Manuale di Installazione
MANIU22.0605 I
VALIDITA’: 31.05.2006
SOSTITUISCE: Nessuno
© 2006 ABB Sace S.p.a. Tutti i diritti riservati.
Istruzioni di sicurezza
Introduzione
Questo capitolo stabilisce le istruzioni di sicurezza da osservare
durante la configurazione dei Convertitori IMC. Il materiale contenuto in
questo capitolo ed in questo manuale deve essere accuratamente
studiato prima di provare o eseguire qualunque operazione su o con i
convertitori.
Attenzione e Note
Questo manuale distingue due tipi di istruzioni di sicurezza.
“ATTENZIONE” è l’equivalente inglese di WARNING ed è usato per
richiamare l’attenzione su situazioni che possono portare a gravi
condizioni di errore, danni fisici e morte. Le note sono usate per
richiamare l’attenzione del lettore o fornire ulteriori informazioni utili
sull’argomento trattato. Le note sono meno critiche dei richiami indicati
con “ATTENZIONE”, ma non dovrebbero essere trascurate.
ATTENZIONE
Il lettore è informato di situazioni che possono provocare gravi danni
fisici e/o gravi danni alle apparecchiature con i seguenti simboli:
ATTENZIONE! Tensione Pericolosa: avverte di
situazioni in cui è presente un livello di tensione che può
provocare danni fisici e/o danni alle apparecchiature. Il
testo accanto al simbolo spiega come evitare il pericolo
di danno.
ATTENZIONE! Pericolo Generico: avverte di situazioni
che possono provocare danni fisici e/o danni alle
apparecchiature ma per cause non elettriche. Il testo
accanto al simbolo spiega come evitare il pericolo.
ATTENZIONE! Scarica Elettrostatica: avverte di
situazioni in cui una scarica elettrostatica può
danneggiare le apparecchiature. Il testo accanto al
simbolo spiega come evitare il pericolo.
Note
Il lettore è richiamato a porre particolare attenzione o esaminare le
ulteriori informazioni disponibili sull’argomento con i seguenti simboli:
AVVERTIMENTO!
Nota.
Corrisponde all’inglese “Caution” ed ha lo scopo
di richiamare l’attenzione su una determinata
questione.
Nota. Fornisce o mette in rilievo ulteriori
informazioni sull’argomento.
Trascurare queste indicazioni può provocare danni fisici e
morte.
Manuale di Installazione IMC-A - MANIU22.0605 I
iii
Instruzioni di Sicurezza
Istruzioni Generali
di Sicurezza
ATTENZIONE! Solo personale qualificato e con
un’adeguata esperienza su azionamenti è autorizzato ad
effettuare le operazioni di installazione e messa in servizio
dei Convertitori IMC.
ATTENZIONE! Per nessuna ragione alcuna persona
deve accedere alla parte interna del convertitore o ai
terminali del servomotore prima che siano trascorsi
almeno cinque minuti dall'interruzione
dell'alimentazione.
Tensioni potenzialmente letali sono presenti sul circuito
intermedio c.c. e sui circuiti associati.
ATTENZIONE! L’installazione deve essere effettuata in
conformità alle Direttive Europee CEE 89/336 and CEE
72/23.
ATTENZIONE! Il costruttore della macchina che installa il
convertitore deve prevedere e realizzare apposite funzioni
di protezione aggiuntive per evitare danni alle persone e
alle apparecchiature durante il servizio della macchina.
Altre istruzioni di sicurezza, “Attenzione” e “Nota.” sono
riportati lungo il testo.
iv
Manuale di Installazione IMC-A - MANIU22.0605 I
Sommario
Istruzioni di sicurezza .......................................................................... iii
Introduzione ..........................................................................................
Attenzione e Note ..................................................................................
ATTENZIONE ......................................................................................
Note...................................................................................................
Istruzioni Generali di Sicur ezza ...............................................................
iii
iii
iii
iii
iv
Sommario .............................................................................................. v
Capitolo 1 – Introduzione al Manuale .................................................. 1-1
Introduzione ........................................................................................
Descr izione generale ...........................................................................
Standard di rif erimento .........................................................................
Marcatur a “CE” .................................................................................
Certif icazione “UL” ............................................................................
1-1
1-1
1-3
1-3
1-3
Capitolo 2 – Specifiche tecniche ......................................................... 2-1
Introduzione ........................................................................................
I MC-A- E ..............................................................................................
Dati nominali ....................................................................................
I MC-A- M .............................................................................................
Dati nominali ....................................................................................
Specif iche di controllo .......................................................................
Schema a blocchi .................................................................................
Protezioni pr incipali .............................................................................
2-1
2-1
2-1
2-2
2-2
2-3
2-8
2-9
Capitolo 3 – Install azione meccanica .................................................. 3-1
Introduzione ........................................................................................
Dimensioni ..........................................................................................
I MC-A- E ...........................................................................................
I MC-A- M03 .......................................................................................
I MC-A- M07 .......................................................................................
I MC-A- M10, I MC- A-M15 e I MC- A- M20..................................................
Istruzioni di montaggio .........................................................................
I MC-A- E ...........................................................................................
I MC-A- M03 .......................................................................................
I MC-A- M07 .......................................................................................
I MC-A- M10, I MC- A-M15 e I MC- A- M20..................................................
Montaggio in Armadio Elettrico ...........................................................
I MC-A- E .........................................................................................
I MC-A- M03 .....................................................................................
I MC-A- M07 .....................................................................................
I MC-A- M10, I MC- A-M15 e I MC- A- M20 ...............................................
Resistenze di f renatura ........................................................................
Manuale di Installazione IMC-A - MANIU22.0605 I
3-1
3-1
3-1
3-1
3-2
3-2
3-3
3-3
3-3
3-3
3-3
3-4
3-4
3-4
3-4
3-5
3-5
v
Sommario
Capitolo 4 – Collegamenti ................................................................... 4-1
Introduzione ........................................................................................ 4-1
Collegamenti ....................................................................................... 4-1
Collegamenti resolver ........................................................................ 4-1
Collegamenti I/O ed Uscita Emulazione Encoder ................................... 4-2
Specif iche degli ingressi analogici .................................................... 4-3
Specif iche degli ingressi digitali ....................................................... 4-3
Specif iche dell’uscit a relè “AO K” ...................................................... 4-3
Specif iche delle uscite encoder ........................................................ 4-4
Specif iche delle uscite analogiche .................................................... 4-4
Collegamenti in gresso encoder ........................................................... 4-5
Encoder TTL incrementale & HES ..................................................... 4-5
Encoder SinCos incr ementale & HES ................................................ 4-7
Encoder SinCos Assoluto Monogiro ................................................... 4-8
Collegamento ser iale ......................................................................... 4-9
Cavo di comunicazione seriale ......................................................... 4-9
Collegamenti aliment azione ausiliar ia .................................................. 4-9
Connessioni di Potenza .................................................................... 4-10
Capitolo 5 – Install azione el ettrica ...................................................... 5-1
Introduzione ........................................................................................ 5-1
Schem i di collegamento ........................................................................ 5-1
I MC-A- E ........................................................................................... 5-1
I MC-A- M ........................................................................................... 5-2
Batteria di r iser va per l’aliment azione ausiliaria ...................................... 5-3
Applicazione mult iasse ......................................................................... 5-3
Cablaggi ............................................................................................. 5-4
Cablaggi e Messa a terra ................................................................... 5-4
Collegamento dello schermo ............................................................... 5-5
Vista del collegamento di I MC -A-10, I MC- A- M15 e I MC-A- M20 ............... 5-6
Cavo motore, revolver ed encoder ....................................................... 5-7
Comandi in ingresso e cavo di collegamento seriale .............................. 5-8
Cavi di connessione della Re sistenza di Frenatura ............................... 5-8
Requisit i e conf ormità agli standard UL .................................................. 5-9
Collegamenti tramite presa Fast on ...................................................... 5-9
Alimentazione 24 VDC ....................................................................... 5-9
Alimentazione Pr incipale e scelta dei f usibili UL ................................... 5-9
Schem i di collegamento con f usibili UL di protezione .......................... 5-10
I MC-A- E Conf orme UL ................................................................... 5-10
I MC-A- M Conf orme UL ................................................................... 5-11
Applicazione mult iasse conf orme UL .................................................. 5-12
Capitolo 6 – Messa in servizio ............................................................ 6-1
Introduzione ........................................................................................ 6-1
Sof tware per l’Impostazione Parametri ................................................... 6-1
Conf igurazione Standard del Convert itor e ............................................... 6-1
Prima Accensione ................................................................................ 6-2
Molto Importante ............................................................................... 6-2
Accendere l’alimentazione 24 VDC ...................................................... 6-2
Accendere l’alimentazione pr incipale ................................................... 6-3
Messa in ser vizio e Taratura dell’azionamento ........................................ 6-4
Comunicazione via Collegamento Ser iale ............................................. 6-4
vi
Manuale di Installazione IMC-A - MANIU22.0605 I
Sommario
Conf igurazione del Sensore di Retroazione .......................................... 6-5
Regolazione del Convert itore .............................................................. 6-6
Regolazione Parametri per un Motore Lineare ...................................... 6-7
Regolazione dell’Anello di Velocità con Carico Verticale ....................... 6-8
Salvataggio dei par ametri del Convertitor e ........................................... 6-8
Fasatura del Mot ore con alimentazione at tiva ....................................... 6-9
Applicazione con Emulazione del Motore Passo - Passo ....................... 6-10
Applicazione Asse Elettrico .............................................................. 6-11
Capitolo 7 – Ricerca guasti ................................................................. 7-1
Introduzione ........................................................................................ 7-1
Errori .................................................................................................. 7-1
Errore di Sistema .............................................................................. 7-1
Errore “BUSY” ................................................................................... 7-1
Errore “EEPRO M” .............................................................................. 7-2
Errore “°C Motor” .............................................................................. 7-2
Errore “UNDERVOLT .” (non -memorizzat o) ........................................... 7-3
Errore “POW ER STAGE” .................................................................... 7-3
Errore “FE EDBACK” nella Conf igurazione Retroazione Resolver ............ 7-4
Errore “RDC” nella Conf igurazione Retroazione Resolver ...................... 7-4
Errore “FEEDBACK” nella Conf igurazione Retroazione Encoder ............. 7-4
Errore “COUNTING ” nella Conf igurazione Retroazione Encoder ............. 7-5
Encoder TTL Incre mentale ............................................................... 7-5
Encoder SinCos .............................................................................. 7-7
Errore “HES” ..................................................................................... 7-8
Errore “I 2 T” ....................................................................................... 7-9
Errore “Following” ............................................................................. 7-9
Ser vo Azionamento in modalità SPEED MODE (“P”, “PI”, “PI²”) ............ 7-9
Ser vo Azionamento in modalità POSITION MODE .............................. 7-9
Problemi Oper ativi ............................................................................. 7-10
Il motore non si muove ..................................................................... 7-10
Il motore è alimentat o, ma non dà coppia ........................................... 7-10
Albero bloccato, oscillazioni irregolar i, o rotazione a velocità massima . 7-10
Rotazione Discontinua del Motore con intervalli a coppia nulla ............ 7-10
Deriva del Motore con comando analogico di velocità pari a zero ......... 7-10
Rumorosità del motore allo stallo ...................................................... 7-11
Rumorosità del motore in moto ed allo st allo ...................................... 7-11
Dif f icoltà di Controllo della Posizione da CN ...................................... 7-11
Assistenza e Manutenzione ................................................................. 7-12
Manutenzione ................................................................................. 7-12
Ser vizio Client i ............................................................................... 7-12
Appendice A – Regolazioni Varie ........................................................ A-1
Posizionam ento dei moduli ................................................................... A-1
Schema mont aggio componenti interni ................................................. A-1
Adattament o a Var i Tipi di Resolver ....................................................... A-1
Adattament o a Var i Tipi di Motore ......................................................... A-2
Sensore Termico di Motore ................................................................. A-2
Protezione I 2 t .................................................................................... A-3
Limit azione di corr ente in “Fusing mode” ........................................... A-3
Limit azione di corr ente in “Limit ing mode” ......................................... A-4
Protezione sui Conteggi Encoder ........................................................ A-5
Protezione sull’Err ore di Posizione ...................................................... A-6
Manuale di Installazione IMC-A - MANIU22.0605 I
vii
Sommario
Utilizzo degli Ingressi di Fine Corsa “FC” ...............................................A-7
Utilizzo dell’Ingresso “CV0” ...................................................................A-7
Utilizzo dell’Uscita “ AOK” ......................................................................A-7
Utilizzo dell’Ingresso di “RESET” ...........................................................A-8
Utilizzo dell’Ingresso “ENABLE” .............................................................A-8
Utilizzo dell’Uscita “ BRAKE” ..................................................................A-8
Uscite Encoder Incr ementale .................................................................A-9
Utilizzo dell’Ingresso “Exter nal Current Limitation” ................................ A-10
Indir izzamento del Convertit ore mediante RS232 ................................... A-10
Indir izzamento del Convertit ore mediante RS422 ................................... A-11
Compensazione della Coppia di Cogging .............................................. A-12
Sistema di Retroazione di Potenza mediante Resistenza di Fr enatura ..... A-14
Codif ica dei convertitori ...................................................................... A-15
viii
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 1 – Introduzione al Manuale
Introduzione
Questo Manuale di Installazione IMC-A fa parte del pacchetto di
manuali MANIU22.0605 I dei Servo azionamenti IMC, fornito da ABB
Sace S.p.a. Il contenuto del presente manuale deve essere studiato
prima di intraprendere qualsiasi attività su o con le apparecchiature.
I Servo azionamenti IMC sono servo amplificatori PWM digitali per il
controllo di velocità di servomotori brushless AC sinusoidali
equipaggiati con un sensore di posizione.
I Servo azionamenti IMC-A sono disponibili in versione monoasse
indipendente (single-axis stand-alone), comprensivi di filtri di rete;
possono essere forniti in due versioni di alimentazione a 230 VAC
oppure a 400/480 VAC.
Oltre al Manuale di Installazione, è disponibile anche il manuale del
software di programmazione ABB AC BRUSHLESS SERVODRIVES
VISUAL SETUP.
Descrizione
generale
Il Servo Convertitore IMC-A controlla la coppia del motore e la velocità
per mezzo delle informazioni ricevute da un sensore di posizione
(revolver o encoder) ad alta risoluzione. La commutazione di corrente
sinusoidale, basata su questo sensore di posizione ad alta risoluzione,
offre un controllo di coppia e di forza molto omogeneo.
Il Servo Convertitore IMC-A può essere configurato per ricevere le
retroazioni di vari tipi di sensori di posizione. La configurazione
adeguata del sensore di posizione può essere selezionata dal software
e salvata nel convertitore.
Con retroazione da sensore resolver, è disponibile il valore
della posizione assoluta del motore su un giro completo ed il
servomotore può essere abilitato immediatamente dopo
l’accensione del convertitore.
Con retroazione da encoder SinCos assoluto monogiro,
(Heidenhain ERN 1085 o compatibile), il servomotore può
essere abilitato immediatamente dopo l’accensione del
convertitore.
Se si dispone soltanto di un encoder incrementale, una
procedura di fasatura del motore deve essere eseguita ad ogni
accensione del convertitore prima di abilitare il motore.
Con retroazione da encoder incrementale + sensori ad effetto
Hall (HES), la procedura di fasatura del motore non è più
necessaria e il servomotore può essere abilitato
immediatamente dopo l’accensione del convertitore.
Manuale di Installazione IMC-A - MANIU22.0605 I
1-1
Capitolo 1 – Introduzione al Manuale
Il comando analogico, di velocità o di coppia del motore, in ingresso è
una tensione analogica (± 10V). Il monitoraggio della posizione del
rotore è disponibile come due canali A e B in quadratura ed un impulso
di zero per giro completo.
La risoluzione è programmabile. È possibile programmare tutti i valori
compresi tra 64 e 16384 impulsi per giro completo (ppr), tenendo conto
dei limiti di velocità del motore. Gli errori principali sono visualizzati sul
pannello frontale del convertitore.
Tutti i parametri di comando sono programmabili tramite collegamento
seriale RS-232 (o RS-422 opzionale) e salvati nella memoria EEPROM
del convertitore. Le funzioni di auto-fasatura ed auto-taratura
permettono una messa in servizio facile e veloce del convertitore.
I convertitori IMC-A hanno un convertitore DC/DC interno per fornire
una tensione logica adeguata ai moduli. Un’alimentazione ausiliaria di
24VDC +/- 15% è generalmente disponibile su tutte le macchine ed è
conforme ai requisiti di alimentazione ausiliaria 24 VDC del
convertitore. L’alimentazione ausiliaria consente di mantenere attiva la
logica del convertitore anche dopo aver spento l’alimentazione
principale, e di mantenere la posizione senza dover inizializzare
nuovamente la macchina. Una batteria di riserva da 24 VDC
opportunamente inserita permette di mantenere la posizione anche
dopo aver spento l’alimentazione ausiliaria di 24 VDC. Questo
cablaggio può essere utilizzato per un funzionamento del tutto
indipendente del convertitore IMC.
L’alimentazione principale dipende dal modello di convertitore:
IMC-A-E: alimentazione di rete monofase oppure trifase a 230
VAC tramite trasformatore o autotrasformatore, oppure trifase
diretta da rete se si dispone di una rete trifase tra i 200 e 230
VAC.
IMC-A-M: alimentazione diretta da rete trifase da 400 a 480
VAC.
Un sistema “soft-start” sull’alimentazione limita l’assorbimento di
corrente all’accensione.
Le dimensioni molto ridotte del convertitore IMC-A consentono un
montaggio perfetto in armadietti profondi appena 300 mm, inclusi i
connettori.
Il software VISUAL SETUP, conforme al sistema operativo
WINDOWS®, permette di visualizzare e modificare facilmente tutti i
parametri del convertitore. La messa in servizio dell’azionamento è
semplice e veloce grazie alla funzione “oscilloscopio digitale” inclusa
nel software.
1-2
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 1 – Introduzione al Manuale
Standard di
riferimento
Marcatura “CE”
I convertitori della serie IMC risultano conformi agli standard EMC
riguardanti i servo meccanismi di potenza citati nello standard
EN61800.3 a proposito di “servo azionamenti elettrici a velocità
variabile”.
EN 55011, “Group 1, Class A”, riguardante le interferenze
radio-elettriche condotte e irradiate;
EN 61000.1-2-3-4-5 riguardante l’immunità.
Standard da applicare ai componenti elettrici di macchine industriali:
EN 60204.1.
I convertitori IMC hanno la marcatura “CE” dall’anno 2000.
Certificazione “UL”
I convertitori IMC sono stati certificati “cULus” secondo le UL508C e
UL840 per quanto riguarda l’isolamento.
Questo prodotto è stato valutato in base a:
la “Terza edizione” del UL508C, “Standard UL for Power
Conversion Equipment”, del maggio 2002 per la certificazione
“UL Listing” (USL).
il “CSA Standard for Industrial Control Equipment”, C22.2 N°
14-95, dell’agosto 1995 per la certificazione UL del Canada
“Canadian UL Listing” (CNL). August 1995 for the Canadian UL
Listing (CNL).
A condizione che l’installatore finale fornisca, come specificato a
manuale, un’alimentazione isolata per l’ingresso ausiliario di 24 VDC
protetto da un fusibile “UL Listed” da 4 A, la scheda di potenza rientra
nella gamma dei circuiti a tensione/corrente limitata secondo la
sezione 31.4 del UL508C. Di conseguenza, le distanze sulla scheda di
potenza sono state valutate secondo UL 840, e non è necessario
valutarle secondo la sezione 31.2 del UL508C.
Secondo i requisiti UL 840 (Seconda Edizione, del 20 maggio, 1993),
le distanze sono limitate a 2.5 mm considerando un ambiente “pollution
degree 2”.
La connessione a terra è fissata sul dispositivo tramite un rivetto,
Avibulb masse, BN10-5168. Il connettore è conforme alle dimensioni
standard stabilite nella tabella 6.2 del UL 310, lo standard per morsetti
elettrici “Quick Connect”.
Manuale di Installazione IMC-A - MANIU22.0605 I
1-3
Capitolo 1 – Introduzione al Manuale
Questa pagina è stata lasciata volutamente bianca.
1-4
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 2 – Specifiche tecniche
Introduzione
Questo capitolo contiene le specifiche tecniche dei Servo
azionamenti IMC-A nel dettaglio.
IMC-A-E
Le tabelle seguenti illustrano le specifiche tecniche dei Servo
azionamenti IMC-A nella versione con alimentazione a 230 V.
Specifiche Tecniche IMC-A-E…
Dati
Tensione di alimentazione principale di
rete
230 VAC +10 % / -15 %
Monofase oppure Trifase
50 - 60 Hz
Codice Prodotto
Taglia di corrente (nominale / di picco)
IMC-A-E02
IMC-A-E05
IMC-A-E08
2/4 Arms
5/10 Arms
8/16 Arms
Tensione di alimentazione ausiliaria con
isolamento galvanico
24 VDC +/- 15 % - 320 mA
Tensione di uscita fase-fase motore
200 Vrms
Sistema di frenatura integrato
Resistenza esterna 100 Ohm / 100 W
(UREP100100)
Resistenza minima
50 Ohm (UREP200050)
Induttanza minima tra le fasi
1 mH
Temperatura Ambiente Massima
40 °C
Dati nominali
Potenza
Fusibili
Corrente
di corto
Corrente
max. di
nominale
di uscita Corrente
Tipo di
protezione circuito
“UL
in
max. per nominale Perdite
per linea di sull’ali- Listed”
Convertitore 1 sec.
ingresso
di uscita
mentarete
+/- 5 %
zione
(60 Hz)
“RK5 listed” principale
230 VAC
[Arms]
230 VAC
[Arms]
[W]
230 VAC
[Arms]
(Bussman /
Littelfuse)
IMC-A-E02
4.5
2.25
30
2.25
6A
5 kA
si
IMC-A-E05
10.5
5.25
55
5.25
6A
5 kA
si
IMC-A-E08
16.5
8.25
66
8.25
9A
5 kA
si
Manuale di Installazione IMC-A - MANIU22.0605 I
2-1
Capitolo 2 – Specifiche Tecniche
Le tabelle seguenti illustrano le specifiche tecniche dei Servo
azionamenti IMC-A nella versione con alimentazione di rete a 400 V.
IMC-A-M
Specifiche Tecniche IMC-A-M…
Dati
Tensione di alimentazione principale di
rete
Da 400 a 480 VAC +10% / -15%
Sistema Trifase, TN oppure TT
con neutro messo a terra
50 - 60 Hz
(la tensione fase/terra deve essere equilibrata)
Codice Prodotto
IMC-A-M03
IMC-A-M07
IMC-A-M10
IMC-A-M15
IMC-A-M20
3/7
Arms
7/14
Arms
10/20
Arms
15/30
Arms
20/45
Arms
Taglia di corrente (nominale / di picco)
Tensione di alimentazione ausiliaria con
isolamento galvanico
24 VDC +/- 15 % - 320 mA
Tensione di uscita fase-fase motore
Da 380 a 460 Vrms a seconda della tensione di
alimentazione principale
Sistema di frenatura integrato
IMC-A-M03:
Resistenza esterna 200 Ω / 100 W
(UREP100200)
IMC-A-M07:
Resistenza esterna 50 Ω / 200 W
(UREP200050)
IMC-A-M10, IMC-A-M15 e IMC-A-M20:
Resistenza esterna 33 Ω / 280 W
(UREP280033)
Induttanza minima tra le fasi
1 mH
Temperatura Ambiente Massima
40 °C
Dati nominali
Corrente
di uscita Corrente
Tipo di
max. per nominale Perdite
Convertitore
1 sec.
di uscita
+/- 5 %
1
Corrente
nominale
in
ingresso
(60 Hz)
Potenza
Fusibili
di corto
max. di
circuito
protezione
“UL
sull’aliper linea di
Listed”
mentarete
zione
“RK5 listed” principale
480 VAC
[Arms]
480 VAC
[Arms]
[W]
480 VAC
[Arms]
(Bussman /
Littelfuse)
IMC-A-M03
7.2
3.6
93
3.6
4A
5 kA
si
IMC-A-M07
14
7
200
7
8A
5 kA
si
IMC-A-M10
20
10
300
10
20 A
5 kA
no1
IMC-A-M15
30
15
400
15
20 A
5 kA
si
IMC-A-M20
45
20
560
20
20 A
5 kA
si
In corso.
2-2
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 2 – Specifiche Tecniche
Specifiche di controllo
Specifiche di controllo
Descrizione
Anelli di regolazione: corrente,
velocità, posizione
Digitale
Filtro di rete sull’alimentazione
principale
Integrato nel convertitore
Filtro di modo comune
sull’alimentazione ausiliaria
Integrato nel convertitore
Sensore di posizione
Opzioni selezionabili:
Resolver
Encoder assoluto monogiro (ERN1085 o
compatibile)
Encoder incrementale (segnali SinCos o TTL)
Encoder incrementale + sensori ad effetto Hall
Protezioni dello stadio di potenza
Vedere paragrafo Protezioni Principali.
Frequenza di commutazione PWM
8 kHz
Limitazione interna della corrente
Imax: dal 20 % al 100 % e Inom: dal 20 % al 50 %
Durata Imax = 1 secondo
Limitazione corrente dall’esterno
Limitazione da ingresso analogico “ILIM”:
Da 0 a 10 V (risoluzione = 13 bit)
Da 100 a 0 % della Imax di limitazione
interna
Polarità della limitazione selezionabile da software:
Da 0 a 10 V (nessun limite per 0 Volt)
Da 10 V a 0 V (nessun limite per 10 Volt)
Comando di velocità da ingresso
analogico “CV”
±10 V, risoluzione = 14 bit
Range rampe di accel/decel. motore
Tra 0 e 30 s da velocità zero a velocità massima
Regolatore di velocità e posizione
Larghezza di banda dell’anello di
velocità
Manuale di Installazione IMC-A - MANIU22.0605 I
-
Periodo di campionamento= 0,5 ms
-
Sistema “anti-wind-up” dell’integratore
-
Filtro antirisonanza
-
Guadagni digitali regolabii
Frequenza di taglio selezionabile per sfasamento di
45°: 50 Hz, 75 Hz oppure 100 Hz
2-3
Capitolo 2 – Specifiche Tecniche
Larghezza di banda dell’anello di
corrente
Frequenza di taglio selezionabile per sfasamento di
45° : 1000 Hz
Velocità massima motore
Regolabile da 100 rpm a 25000 rpm
Intervallo di velocità
1 : 8192 con 14 bit di risoluzione del commando di
ingresso
Uscita posizione encoder
Caratteristiche:
-
Due canali A e B in quadratura con un
impulso di zero per giro completo.
-
Line Driver RS422.
-
Risoluzione programmabile tra 64 ppr e
16384 ppr (secondo la velocità massima
del motore)
-
Precisione “Arc minute” = (8 + 5400 /
Risoluzione)
Nota: Per valutare la precisione totale della
posizione è necessario tenere in considerazione
anche la precisione del resolver utilizzato.
Ingresso resolver
Risoluzione: 65536 ppr (16 bit)
Frequenza di eccitazione: 8 kHz
Rapporto di trasformazione: da 0.3 a 0.5 (altri valori
necessitano di un aggiustamento delle impostazioni
di fabbrica)
Ingresso encoder
Opzioni selezionabili da software:
Ingresso “PULSE” e “DIRECTION”
2-4
o
Segnali A & B in quadratura con impulso di
zero Z
Ricevitore di linea RS 422
Massima frequenza impulso: 1 MHz
Risoluzione: da 500 a 106 ppr
o
Encoder incrementale Sin/Cos
Heidenhain 1Vcc modello Sin/Cos o
compatibile
Massima frequenza segnale: 200 kHz
Risoluzione: da 500 a 106 ppr
Fattore di interpolazione: 1024
o
Encoder Sin/Cos assoluto monogiro
Heidenhain ERN 1085 o compatibile
Massima frequenza segnale: 200 kHz
Risoluzione: da 2048 o 512 ppr
Fattore di interpolazione: 1024
Riconfigurazione dell’ingresso encoder per
emulazione motore stepper:
-
Ricevitore di linea RS-422
-
Frequenza massima impulso: 1 MHz
-
Risoluzione: da 200 a 106 punti /giro
completo
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 2 – Specifiche Tecniche
Ingresso sensori Hall
Selezionabile da software: HES a 120° oppure 60°
tensione di alimentazione: 5 V o 12 V
rilevazione errore di sequenza HES
Ingressi logici
o
Abilita / Disabilita: “ENABLE”
o
Fine corsa positivo: “FC+”
o
Fine corsa negativo: “FC-”
o
Comando di corrente: “CI”
o
Comando di velocità zero / Comando di autofasatura: “CV0”
o
“RESET” errori
o
Contatto relè: “AOK”
Umax = 50 V, Imax = 100 mA, Pmax = 10 W
“AOK”: chiuso se il convertitore è OK, aperto
se è in errore
o
Controllo freno motore: “BRAKE”
Massimo 1.5 A con 24 VDC.
Collettore aperto (open-collector) protetto da
cortocircuiti.
Il freno è controllato quando il motore è
abilitato: ovvero con “ENABLE” attivo e
nessun errore presente.
Uscite logiche
Uscita analogica
Caratteristiche:
+/-10V, risoluzione: 8 bit,
carico: 10 mA,
linearità: 2%,
Filtro passa basso: 170 Hz,
Segnale d’uscita programmabile: Canale
1 dell’oscilloscopio digitale (corrente,
velocità o posizione) o uscita “Phasing
OK” (per encoder incrementali senza
HES)
Visualizzazione errore
LED sul pannello frontale e diagnostica attraverso il
collegamento seriale.
Parametrizzazione
Via collegamento seriale RS-232 di serie (RS-422
opzionale)
Funzioni automatiche
Adattamento del convertitore al motore: autofasatura motore (AUTO-PHASING)
Taratura automatica dei guadagni del regolatore:
(AUTO-TUNING)
Compensazione dell’offset sull’ingresso analogico
(OFFSET COMPENSATION)
Manuale di Installazione IMC-A - MANIU22.0605 I
2-5
Capitolo 2 – Specifiche Tecniche
Conformità agli standard
Marcatura CE
Schermo a “360°”, equipotenziale secondo le
regole di cablaggio
Standard EMC:
-
Immunità: EN 61000.4-2-3-4-5
-
Interferenze condotte e radiate: EN
55011, “Group 1, Class A”
Standard elettrici per macchine industriali:
Conformità agli standard
-
EN 60204.1: - Isolamento: 1500 VAC / 1
min.
-
Corrente di dispersione > 30 mA (filtri
EMI)
Certificazione UL
Schermo “360°”, equipotenziale secondo le regole
di cablaggio.
I convertitori della serie IMC sono state certificati
“cULus” secondo la UL508C e la UL840 per quanto
riguarda l’isolamento.
Questo prodotto è stato valutato in base a:
Temperatura
-
“Terza Edizione” dello standard UL508C,
“UL Standard for Power Conversion
Equipment”, del Maggio 2002 per l’“UL
Listing” (USL);
-
CSA Standard for Industrial Control
Equipment, C22.2 N° 14-95, dell’agosto
1995 per il “Canadian UL Listing” (CNL).
Oltre i 40°C, i valori della corrente nominale devono
essere ridotti del 3% per ogni °C in più.
Temperatura max.: 50°C
Magazzinaggio: da - 20°C a + 70°C
Esercizio: da 5°C a +40°C
Altitudine
1000 m
Umidità
< 50 % a 40°C e < 90 % a 20°C: (standard EN
60204.1)
Condensa vietata (sia in deposito che in funzione)
Raffreddamento
Aria forzata (ventola integrata nel convertitore IMC)
Verificare che la ventilazione sia libera da ostacoli
superiori o inferiori alle prese d’aria.
2-6
Ambiente
Telaio aperto (open-chassis) da montare in un
alloggiamento che protegga l’azionamento dalla
polvere conduttiva e dalla condensa (ambiente
“pollution degree 2”)
Posizione di montaggio
Verticale
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 2 – Specifiche Tecniche
Alloggiamento
In armadio chiuso senza agenti conduttivi o
corrosivi e nel rispetto dei requisiti di temperatura
ambiente.
Condensa vietata.
Peso
IMC-A-E: circa 1 kg
IMC-A-M03: circa 1.5 kg
IMC-A-M07: circa 3 kg
IMC-A-M10, IMC-A-M15 e IMC-A-M20: circa 4.8 kg
Manuale di Installazione IMC-A - MANIU22.0605 I
2-7
Capitolo 2 – Specifiche Tecniche
Schema a blocchi
2-8
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 2 – Specifiche Tecniche
Protezioni principali
Le seguenti protezioni sono memorizzate nel servo azionamento.
PROTEZIONE
ERRORE
VISUALIZZATO
LED
I2 t
Feedback
HES
Power stage
Counting / RDC
Caduta di tensione sull’alimentazione principale (errore non
memorizzato)
Undervolt.
Sovratemperatura del motore
°C motor
Errore di inseguimento di velocità o di posizione.
Following error
Errore nella memoria parametri del convertitore.
EEPROM
Errore di esecuzione procedura; oppure, errore di esecuzione
in fase di inizializzazione
Busy
Alimentazione ausiliaria 24VDC fuori tolleranza:
19 V < 24 VDC < 29 V
24 V
Sovraccarico corrente nominale del convertitore (vedi
Appendice A)
Errore di retroazione della posizione (resolver o encoder)
Errore nella sequenza dei sensori Hall o interruzione del cavo;
oppure, errore nel canale di commutazione dell’encoder
assoluto monogiro
Errore dello stadio di potenza
Errore conteggio impulsi encoder; oppure, errore di
conversione posizione revolver
Questo simbolo “” indica LED spento, e questo “” indica LED
acceso.
L’errore “Power stage” include i seguenti errori:
-
Sovratensione sull’alimentazione principale
-
Protezione commutazione interna
-
Cortocircuito tra le fasi del motore o tra fase motore e terra
-
Sovratemperatura del convertitore (solo per IMC-A-M)
-
Guasto del sistema di ventilazione
-
Errore del controllo PWM
-
Guasto alimentazione stadio di potenza
-
Guasto del sistema di frenatura
Ulteriori dettagli dell’errore “Power stage” vengono visualizzati nel
software VISUAL SETUP.
Manuale di Installazione IMC-A - MANIU22.0605 I
2-9
Capitolo 2 – Specifiche Tecniche
Tutti questi errori sono memorizzati nel convertitore tranne l’errore
“UNDERVOLT.”
La cancellazione di un errore rilevato può avvenire in uno dei
seguenti modi:
-
per mezzo della funzione “RESET” nel software VISUAL
SETUP;
-
tramite l’ingresso “RESET” (pin 13 del connettore “X2”);
-
spegnendo l’alimentazione principale del convertitore.
Tutti gli errori producono la disabilitazione del convertitore e, a parte
l’errore “UNDERVOLT.”, provocano l’apertura del contatto relè
“AOK”.
L’errore “UNDERVOLT.” può essere configurato nel software per
aprire il contatto relè “AOK”.
2-10
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 3 – Installazione meccanica
Questo capitolo illustra le istruzioni per l’installazione meccanica degli
azionamenti IMC-A.
Introduzione
Dimensioni
IMC-A-E
IMC-A-M03
Manuale di Installazione IMC-A - MANIU22.0605 I
3-1
Capitolo 3 – Installazione Meccanica
IMC-A-M07
IMC-A-M10, IMC-A-M15
e IMC-A-M20
3-2
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 3 – Installazione Meccanica
Istruzioni di
montaggio
E’ obbligatorio il montaggio in verticale.
IMC-A-E
IMC-A-M03
IMC-A-M07
IMC-A-M10, IMC-A-M15
e IMC-A-M20
Manuale di Installazione IMC-A - MANIU22.0605 I
3-3
Capitolo 3 – Installazione Meccanica
Montaggio in Armadio
Elettrico
IMC-A-E
IMC-A-M03
IMC-A-M07
3-4
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 3 – Installazione Meccanica
IMC-A-M10, IMC-A-M15
e IMC-A-M20
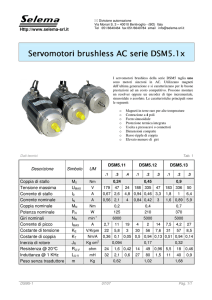
Resistenze di
frenatura
DIMENSIONE
UREP200050, UREP100100 and
UREP100200
UREP280033
A
157 mm
290 mm
B
145 mm
278 mm
C
52 mm
57 mm
Manuale di Installazione IMC-A - MANIU22.0605 I
3-5
Capitolo 3 – Installazione Meccanica
Questa pagina è stata lasciata volutamente bianca.
3-6
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 4 – Collegamenti
Introduzione
Questo capitolo fornisce una panoramica dei collegamenti dei servo
azionamenti IMC-A.
Collegamenti
I connettori del convertitore si trovano sia sul pannello frontale che
sulla parte superiore dell’azionamento.
Collegamenti resolver
Il connettore resolver “X1” è un sub-D 9-pin femmina. L’uscita pin del
connettore resolver “X1” è illustrata nella tabella seguente.
Pin
Funzione
1
TC (sensore termico)
Se l’interruttore termico è connesso a “X1”
2
TC (sensore termico)
Se l’interruttore termico è connesso a “X1”
3
S3 (cos+)
Segnale Resolver
4
S2 (sen+)
Segnale Resolver
5
R1 (riferimento+)
Segnale Resolver
6
Connessione schermo
7
S1 (cos-)
Segnale Resolver
8
S4 (sen-)
Segnale Resolver
9
R2 (riferimento-)
Segnale Resolver
Manuale di Installazione IMC-A - MANIU22.0605 I
Descrizione
Se non ci sono connessioni a “360°” sul connettore
4-1
Capitolo 4 – Collegamenti
Collegamenti I/O ed
Uscita Emulazione
Encoder
Il connettore “X2” è dedicato ai comandi di ingresso/uscita, sia digitali
che analogici, e ai segnali di uscita dell’emulazione encoder. E’ un
connettore sub-D 25-pin femmina e l’uscita pin è illustrata di seguito.
Pin
Funzione
I/O
Descrizione
1
FC+: Limit switch +
I
Fine corsa positivo. *
14
FC-: Limit switch -
I
Fine corsa negativo. *
24
Ref. inputs
I
Riferimento dell’alimentazione degli ingressi logici con
isolamento galvanico
20
ENABLE
I
Ingresso per l’abilitazione hardware dell’azionamento. *
23
Ref. inputs
I
Riferimento dell’alimentazione degli ingressi logici con
isolamento galvanico
2
CI
I
Abilita il controllo di coppia con riferimento da ingresso
analogico “CV”. *
10
CV0 / Motor phasing
I
Ingresso comando velocità zero / fasatura motore. *
25
GND
I
Riferimento di terra GND del convertitore.
13
RESET
I
Cancellazione degli errori nella memoria del convertitore. *
12
Ref. inputs (0 Volt)
I
Riferimento dell’alimentazione degli ingressi logici con
isolamento galvanico
17
CV+
I
16
CV-
I
Ingresso analogico ± 10 V: riferimento di velocità, oppure
riferimento di corrente con ingresso “CI” attivo.
15
GND
I
Riferimento di terra GND del convertitore.
3
ILIM
I
Ingresso analogico per limitazione della corrente dall’esterno;
da 0 a 10 V per limitare da 100 % a 0 % della Imax.
11
Analog output
O
+/-10V; risoluzione: 8 bit; carico: 10 mA; linearità: 2%; filtro
passa basso: 170 Hz; segnale in uscita programmabile:
Canale 1 dell’oscilloscopio digitale (corrente, velocità o
posizione) o uscita “Phasing OK” (da 0 V a 10 V quando la
fasatura del motore è “OK” per un encoder incrementale
senza HES)
18,
19
AOK: amplifier ready
O
Contatto relè: chiuso se il convertitore è OK, aperto se è in
errore.
Protezione contro sovratensioni da TRANSIL bidirezionali.
Pmax = 10 W con Umax = 50 V o Imax = 100 mA
21
+ 12 Volts
O
Impedenza d’uscita: 9 Ohm, max. 150 mA disponibili
22
- 12 Volts
O
4
Z/
O
5
Z
O
Impedenza d’uscita: 47 Ohm, max. 50 mA disponibili
Uscita differenziale dell’impulso di zero Z/ dell’encoder (max.
5 V, 20 mA)
Uscita differenziale dell’impulso di zero Z dell’encoder (max.
5 V, 20 mA)
6
A/
O
Uscita differenziale del canale encoder A/ (max. 5V, 20mA)
7
A
O
Uscita differenziale del canale encoder A (max. 5V, 20mA)
8
B/
O
Uscita differenziale del canale encoder B/ (max. 5V, 20 mA)
9
B
O
Uscita differenziale del canale encoder B (max. 5V, 20 mA)
* Ingresso logico positivo optoisolato, isolamento galvanico
Nota.
4-2
La somma delle correnti assorbite dal pin 21 del
connettore “X2” e dal pin 10 del connettore “X3”
non deve superare i 150 mA.
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 4 – Collegamenti
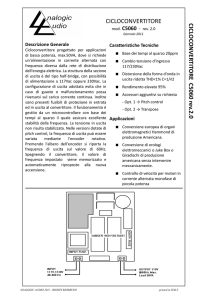
Specifiche degli ingressi
analogici
Gli ingressi analogici sono “CV+” e “CV-” per il comando di riferimento,
e “ILIM” per la limitazione di corrente.
2.2nF
X2-3 (ILIM)
10K
100K
18K
10K
X2-25 (GND)
16K
X2-17 (CV+)
20K
100K
100K
100K
100K
X2-16 (CV-)
16K
1nF
X2-15 (GND)
Specifiche degli ingressi
digitali
1nF
Gli ingressi digitali “ENABLE”, “FC+”, “FC-”, “RESET”, “CV0” e “CI”
sono ingressi logici optoisolati.
5V
IMC-A
8.2 K
Ingresso logico
100 nF
10 KΩ
100 KΩ
0V
Specifiche dell’uscita relè
“AOK”
Il contatto relè “AOK” si apre per qualsiasi errore eccetto l’errore di
“UNDERVOLT.” (Pmax = 10 W con Umax = 50 V e Imax = 100 mA).
Manuale di Installazione IMC-A - MANIU22.0605 I
4-3
Capitolo 4 – Collegamenti
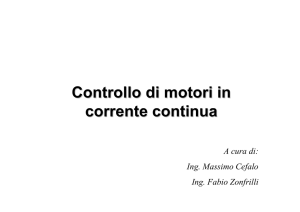
Specifiche delle uscite
encoder
Specifiche delle uscite
analogiche
4.7nF
200K
33K
X2/11
X2/25
4-4
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 4 – Collegamenti
Collegamenti ingresso
encoder
Encoder TTL
incrementale & HES
Il connettore dell’ingresso encoder “X3” è un sub-D 25-pin femmina.
Questo connettore deve essere usato per collegare il sensore di
posizione, che può essere:
encoder TTL incrementale
encoder Sincos incrementale
o encoder assoluto monogiro
La configurazione “ TTL incremental Encoder & HES” è selezionabile
tramite il software e viene memorizzata nella EEPROM del
convertitore. L’uscita pin del connettore “X3” corrispondente a questa
configurazione è illustrata nella tabella seguente.
Pin
Funzione
18
Marker Z/
Ingresso differenziale dell’impulso di marker encoder Z/
5
Marker Z
Ingresso differenziale dell’impulso di marker encoder Z
19
Channel A/
Ingresso differenziale del canale encoder A/
6
Channel A
Ingresso differenziale del canale encoder A
20
Channel B/
Ingresso differenziale del canale encoder B/
7
Channel B
Ingresso differenziale del canale encoder B
8
+5 V
Tensione di alimentazione dell’encoder (300 mA corrente max.)
21
GND
GND dell’alimentazione encoder
11
HALL U
Segnale di ingresso fase U del sensore Hall
24
HALL V
Segnale di ingresso fase V del sensore Hall
12
HALL W
Segnale di ingresso fase W del sensore Hall
10
+12 V
Tensione di alimentazione dei sensori Hall: impedenza di
uscita = 9 Ω, max 150 mA disponibili. La somma delle correnti
assorbite dal pin 21 del connettore “X2” e dal pin 10 del
connettore “X3” non deve superare i 150 mA.
23
AGND
GND dell’alimentazione sensori Hall
9
TC+
Ingresso sensore termico motore
22
TC-
Ingresso sensore termico motore
altri
riservati
Manuale di Installazione IMC-A - MANIU22.0605 I
Descrizione
-
4-5
Capitolo 4 – Collegamenti
Specifiche dei segnali di ingresso dell’encoder:
+5V
3.3K
200R
200R
+5V
X3-5,6,7
X3-18,19,20
75-176
receiver
Specifiche dei segnali di ingresso del sensore Hall:
+3.3V
X3-11,12,24
10K
1K
1nF
74HC14
X3-23
4-6
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 4 – Collegamenti
Encoder SinCos
incrementale & HES
La configurazione “SinCos incremental encoder & HES” è
selezionabile tramite software e memorizzata nella EEPROM del
convertitore.
L’uscita pin del connettore”X3” corrispondente a questa
configurazione è descritta nella tabella seguente.
Pin
Funzione
Descrizione
25
Marker R/
Ingresso differenziale dell’impulso di riferimento R/ dell’encoder Sin/Cos
13
Marker R
Ingresso differenziale dell’impulso di riferimento R dell’encoder Sin/Cos
14
Channel A/
Ingresso differenziale del canale A/ dell’encoder Sin/Cos
1
Channel A
Ingresso differenziale del canale A dell’encoder Sin/Cos
15
Channel B/
Ingresso differenziale del canale B/ dell’encoder Sin/Cos
2
Channel B
Ingresso differenziale del canale B dell’encoder Sin/Cos
8
+5V
Tensione di alimentazione dell’encoder (300 mA corrente max.)
21
GND
GND dell’alimentazione encoder
11
HALL U
Segnale di ingresso fase U del sensore Hall
24
HALL V
Segnale di ingresso fase V del sensore Hall
12
HALL W
Segnale di ingresso fase W del sensore Hall
10
+12V
Tensione di alimentazione dei sensori Hall: impedenza di uscita = 9 Ω,
max 150 mA disponibili. La somma delle correnti assorbite dal pin 21
del connettore “X2” e dal pin 10 del connettore “X3” non deve superare
i 150 mA.
23
AGND
GND dell’alimentazione dei sensori Hall
9
TC+
Ingresso sensore termico motore
22
TC-
Ingresso sensore termico motore
altri
riservati
-
Specifiche dei segnali di ingresso dell’encoder.
20K
X3-1,2,13
20K
120R
20K
X3-14,15,25
20K
Uref
Le specifiche dei segnali di ingresso dei sensori Hall sono le stesse
descritte nel paragrafo precedente Encoder TTL incrementale & HES.
Manuale di Installazione IMC-A - MANIU22.0605 I
4-7
Capitolo 4 – Collegamenti
Encoder SinCos Assoluto
Monogiro
La configurazione “Absolute single-turn SinCos Encoder” (Heidenhain
ERN 1085 o compatibile) può essere selezionata dal software e
memorizzata nella EEPROM del convertitore. L’uscita pin del
connettore “X3” corrispondente a questa configurazione è descritta
nella tabella seguente.
Pin
Function
Descrizione
25
Marker R/
Ingresso differenziale dell’impulso di riferimento R/ dell’encoder Sin/Cos
13
Marker R
Ingresso differenziale dell’impulso di riferimento R dell’encoder Sin/Cos
14
Channel A/
Ingresso differenziale del canale A/ dell’encoder Sin/Cos
1
Channel A
Ingresso differenziale del canale A dell’encoder Sin/Cos
15
Channel B/
Ingresso differenziale del canale B/ dell’encoder Sin/Cos
2
Channel B
Ingresso differenziale del canale B dell’encoder Sin/Cos
16
Channel C/
Ingresso differenziale del canale C/ dell’encoder Sin/Cos
3
Channel C
Ingresso differenziale del canale C dell’encoder Sin/Cos
17
Channel D/
Ingresso differenziale del canale D/ dell’encoder Sin/Cos
4
Channel D
Ingresso differenziale del canale D dell’encoder Sin/Cos
8
+5V
Tensione di alimentazione dell’encoder (300 mA corrente max.)
21
GND
GND dell’alimentazione encoder
9
TC+
Ingresso sensore termico motore
22
TC-
Ingresso sensore termico motore
altri
Riservati
-
Specifiche dei canali dell’encoder SinCos:
20K
X3-1,2,13
20K
120R
20K
X3-14,15,25
20K
Uref
Specifiche dei canali di commutazione dell’encoder SinCos:
75K
X3-3,4
20K
1K
20K
X3-16,17
75K
Uref
4-8
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 4 – Collegamenti
Collegamento seriale
Cavo di comunicazione
seriale
Il connettore del collegamento seriale “X5” è un sub-D 9-pin maschio.
L’uscita pin del connettore “X5” è la seguente.
Pin
Funzione
Descrizione
1
-
2
RXD
Ricezione dati RS-232
3
TXD
Trasmissione dati RS-232
4
-
5
0 Volt
GND (connessione dello schermo se non c’è nessuna connessione a
360° sul connettore)
6
TXH
Trasmissione dati RS-422
7
TXL
Trasmissione dati RS-422
8
RXL
Ricezione dati RS-422
9
RXH
Ricezione dati RS-422
-
-
Utilizzare il seguente schema per il collegamento seriale del PC al
Servo azionamento IMC-A.
Collegamento schermo 360°
Porta
Seriale
PC
RxD 2
3 TxD
TxD 3
2 RxD
GND 5
5 GND
SubD-9 femmina
Collegamenti
alimentazione ausiliaria
Porta “X5”
IMC
SubD-9 femmina
Il connettore “X8” è il morsetto dell’alimentazione ausiliaria. E’ un
connettore 4 pin maschio di passo 5.08 mm; il connettore femmina
volante viene fornito unitamente al convertitore. La coppia di
serraggio delle viti del connettore deve essere pari a 0.5 Nm.
Pin
Segnale I/O
Funzione
Descrizione
1
GND
I
Riferimento
dell’alimentazione
ausiliaria 24 VDC.
GND = riferimento potenziale
2
+24 VDC
I
Alimentazione ausiliaria
24 VDC isolata
24 VDC +/-15 %, 0.320 A
(senza controllo freno)
Regolazione col carico: 3 %
3
Brake+
24 V
O
Alimentazione del freno
motore con 24 VDC
Per freni senza alimentazione:
24 VDC / 1.5 A
4
Brake-
O
Controllo diretto del
freno motore
Imax = 1.5 A
Uscita del carico messa a terra e protetta da
cortocircuiti.
Manuale di Installazione IMC-A - MANIU22.0605 I
Protezione UL
tramite fusibile
UL da 4 A
4-9
Capitolo 4 – Collegamenti
Connessioni di Potenza
Il connettore “X9” è il morsetto per i collegamenti elettrici di potenza. Il
connettore “X9” è:
IMC-A-E: connettore 10 pin maschio di passo 5.08 mm;
IMC-A-M: connettore 10 pin maschio di passo 7.62 mm;
unitamente al convertitore viene fornito il rispettivo connettore volante
femmina. La coppia di serraggio delle viti del connettore deve essere
pari a 0.5 Nm
Pin
Signal
I/O
Funzione
1
RB
O
2
RB
O
Potenza rigenerata
durante la
decelerazione di motori
ad alta inerzia e
velocità
Descrizione
IMC-A-E:
100 Ohm / 100 W (UREP100100)
IMC-A-M03:
200 Ohm / 100 W (UREP100200)
IMC-A-M07:
50 Ohm / 200 W (UREP200050)
IMC-A-M10, IMC-A-M15 and
IMC-A-M20:
33 Ohm / 280 W (UREP280033)
Le resistenze di frenatura devono essere
ordinate a parte.
3
DC-
I/O
DC bus -
4
L1
I
Ingresso alimentazione
principale.
5
L2
I
6
L3
I
Filtri sull’alimentazione
principale integrati nel
convertitore
7
DC+
I/O
DC bus +
8
W
O
Motor phase W
9
V
O
Motor phase V
10
U
O
Motor phase U
Nota.
Terminale negativo per il collegamento in
parallelo del bus in c.c.
IMC-A-E, 230 VAC, Monofase o Trifase
IMC-A-M, da 400 a 480 VAC, Trifase
Terminale positivo per il collegamento in
parallelo del bus in c.c.
Collegamenti del cavo motore con messa a
terra tramite connettore Faston e
collegamento a terra dello schermo a 360°.
Il cavo motore deve essere schermato a
360° e lo schermo deve essere collegato
agli appositi dispersori montati nell’armadio.
ATTENZIONE! Il conduttore di terra del
cavo motore DEVE essere connesso alla
presa Faston marcata col segno GND.
Nota.
Il riferimento a terra deve essere connesso
anche alla seconda presa Faston.
L’installatore finale degli azionamenti deve utilizzare un connettore
rapido “UL Listed” per la connessione a terra (0.250 pollici o 6.35 mm
di larghezza nominale).
Per i cablaggi utilizzare solo conduttori di rame.
Il valore della coppia di serraggio dei morsetti deve essere conforme
ai morsetti “Recognized” utilizzati.
4-10
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 5 – Installazione elettrica
Introduzione
Questo capitolo fornisce le linee guida per installare i Servo azionamenti
IMC-A.
Schemi di
collegamento
Questo paragrafo mostra una panoramica dei collegamenti dei Servo
azionamenti IMC-A.
IMC-A-E
IMC-A-E
Nota.
Manuale di Installazione IMC-A - MANIU22.0605 I
La protezione sull’alimentazione sia
principale sia dei 24 V deve essere realizzata
dall’installatore finale.
5-1
Capitolo 5 – Installazione Elettrica
IMC-A-M
IMC-A-M
* IMC-A-M03: UREP100200
IMC-A-M07: UREP200050
IMC-A-M10, -M15 and -M20: UREP280033
* Interruttore con curva D
I1s = 10 x In
** 10 A per IMC-A-M03 e -M07
20 A per IMC-A-M10, -M15 e -M20
Nota.
5-2
La protezione sull’alimentazione sia
principale sia dei 24 V deve essere realizzata
dall’installatore finale.
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 5 – Installazione Elettrica
Batteria di riserva
per l’alimentazione
ausiliaria
Il consumo del convertitore IMC-A è di 320 mA con 24VDC. Perciò una
batteria di riserva da 24 V/30 A/h può mantenere il convertitore
alimentato, per esempio, per un weekend della durata di 3 giorni
oppure durante un black-out, senza perdere i dati di inizializzazione
della macchina. Questo metodo di backup è molto utile per salvare i
dati di inizializzazione della macchina nonché la posizione dell’asse
anche quando si spegne l’alimentazione principale. Un comando ASCII
consente di inviare la posizione dell’asse al sistema digitale
supervisore (host).
La figura seguente fornisce un esempio di schema di collegamento
della batteria di riserva.
IMC-A
IMC-A
La figura seguente mostra un esempio di collegamento multiasse.
IMC-A
Applicazione
multiasse
*** IMC-A-E: 3 x 230 V
IMC-A-M: 3 x 400 V
Interruttore automatico con curva D
I1s = 10 x In
Per un’applicazione multiasse con n azionamenti, l’interruttore automatico di
linea deve essere dimensionato in base alla seguente formula:
I nominale azionamento
Tuttavia, la corrente nominale dell’interruttore non deve superare:
- 20 A su azionamenti IMC-A-E,
- 20 A su azionamenti IMC-A-M03 e IMC-A-M07,
- 40 A su azionamenti IMC-A-M10, IMC-A-M15 e IMC-A-M20.
Manuale di Installazione IMC-A - MANIU22.0605 I
5-3
Capitolo 5 – Installazione Elettrica
Cablaggi
I cablaggi deveno essere effettuati solo da personale specializzato e
secondo gli standard EN61000.1-2-3-4-5 e EN55011. Vedere
paragrafo successivo Collegamento dello schermo.
Cablaggi e Messa a
terra
ATTENZIONE!
Ogni elemento conduttore deve essere
schermato. Se ci sono più conduttori
nella stessa calza metallica, è
necessario intrecciarli e schermarli.
Uno schermo non ha alcun effetto a meno che non sia collegato a:
un potenziale di riferimento;
con il collegamento più corto possibile (pochi centimetri; 10 cm
sono vietati);
con un collegamento dello schermo a “360°”. Ciò significa che
l’intera circonferenza della calza metallica deve essere
collegata al conduttore di terra con un collarino di metallo.
I connettori utilizzati per conformità allo standard EN61000.4 devono
essere di metallo o metallizzati e devono permettere un collegamento
dello schermo a 360°.
L’uso di anelli di terra (collegamenti equipotenziali, specialmente con
collegamento a terra) è consigliato solo per anelli con un’impedenza
molto bassa (< 0,1 ). Per assicurare la continuità dello schermo, ogni
schermo non utilizzato come conduttore può essere collegato ad
entrambe gli estremi, a condizione che sia collegato a 360° e che sia di
metallo.
Il potenziale di riferimento preferito è sempre la terra.
I cavi a bassa tensione non dovrebbero MAI passare in prossimità dei
cavi di potenza.
Se vi è un punto che può essere utilizzato come riferimento di terra
locale, ad esempio un telaio principale o un armadio, tutti i componenti
dovranno fare riferimento a questo punto con una bassa impedenza; a
sua volta, questo punto deve essere opportunamente messo a terra
con collegamenti corti.
5-4
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 5 – Installazione Elettrica
Collegamento dello
schermo
Regola: Lo schermo non deve mai essere interrotto o danneggiato per
tutta la lunghezza del cavo.
Se necessario adoperare nastro di rame
autoadesivo per aumentare il diametro
dello schermo al fine di fissarlo
correttamente all’interno del serracavo
Connettore lato motore
Involucro dei pin SUB-D
di metallo o di plastica metallizzata
Schermo a 360° fissato
tramite serracavo
Le viti di serraggio devono
essere fissate al fine di
assicurare la continuità dello
schermo sul contenitore del
convertitore
Connettore SUB-D
NOTA.
Per migliorare il contatto ed evitare la corrosione dello schermo, usare il
nastro di rame autoadesivo della 3 M “Electrical Specialities Division”,
ref. 1739-7.
Nota.
Manuale di Installazione IMC-A - MANIU22.0605 I
Quando il collegamento dello schermo a 360° è
ottenuto per mezzo di un anello, non è
necessario collegare un cavo al relativo pin del
connettore SUB-D.
5-5
Capitolo 5 – Installazione Elettrica
Vista del collegamento
di IMC-A-10, IMC-A-M15
e IMC-A-M20
5-6
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 5 – Installazione Elettrica
Cavo motore, revolver
ed encoder
Il motore ed il resolver, oppure l’encoder, sono collegati a terra tramite
la loro struttura.
Le terminazioni dei conduttori devono essere terminali di metallo con
collarini che permettono il collegamento dello schermo a 360°.
Le coppie di segnali del resolver (seno, coseno, riferimento) devono
essere intrecciate e schermate. I cavi di alimentazione motore
DEVONO essere schermati e collegati a 360° ad entrambi i capi come
illustrato nello schema di collegamento dello schermo.
I cavi dei segnali “A”, “B”, “C”, “D”, “Z” ed “R” dell’encoder devono
essere intrecciati e schermati. Lo schermo deve essere collegato a
360° ad entrambi gli estremi per mezzo di anelli metallici. Se lo
schermo è collegato per mezzo di un conduttore intrecciato, un
estremo deve essere collegato al pin GND del connettore lato
convertitore con un collegamento il più corto possibile.
I motori dotati di freno devono avere anche i cavi del freno schermati
per essere conformi agli standard EMC.
Le lunghezze massime per i cavi sono:
-
Cavo Resolver 100 m
-
Cavo Encoder 25 m
-
Cavo di alimentazione motore: 25 m ≤ d ≤ 100 m
Consigliamo di:
utilizzare conduttori di sezione massima consentita dai
connettori;
montare una reattanza con un valore induttivo compreso tra
l’1% e il 3% dell’induttanza motore. Il valore induttivo della
reattanza deve essere tenuto in considerazione nei calcoli
dell’anello di corrente. Il valore corrente della reattanza deve
essere uguale o più elevato del valore dell’azionamento. La
reattanza deve essere montata all’uscita dell’azionamento. Se
si utilizza una reattanza, la schermatura del cavo non è più
obbligatoria. ABB Sace può fornire un filtro sinusoidale più
complesso da montare al posto della reattanza.
Utilizzando cavi di alimentazione motore più lungo di 25 m si rischiano i
seguenti effetti indesiderati:
-
riscaldamento del modulo di potenza, del motore e del cavo.
-
sovratensioni sugli avvolgimenti del motore che ne riducono il
ciclo di vita.
La reattanza riduce gli effetti indesiderati sul motore e sull’azionamento,
ma tende a surriscaldarsi. Questo richiede un sistema di raffreddamento
adeguato.
Manuale di Installazione IMC-A - MANIU22.0605 I
5-7
Capitolo 5 – Installazione Elettrica
Comandi in ingresso e
cavo di collegamento
seriale
Il segnale “CV” riferimento da ingresso analogico richiede un cavo
schermato e intrecciato. Lo schermo deve essere collegato a 360°
tramite connettori metallici ad entrambi gli estremi dei conduttori.
Il cablaggio del comando analogico (“CV”) deve essere fatto secondo
la polarità tra il controllore e il convertitore (“CV+” su “diff high” del
controllore. La tensione logica 0 Volt è direttamente collegata al corpo
del convertitore. La continuità del collegamento a terra è assicurata
dalle viti di fissaggio dei connettori sub-D posti sul pannello frontale.
Tuttavia la tensione 0 Volt del convertitore e del controllore
DEVONO essere collegati insieme. Lo schermo non deve MAI
essere utilizzato come conduttore della tensione logica 0 Volt.
Anche il cavo di collegamento seriale deve essere schermato in base
alle raccomandazioni date fin qui.
ATTENZIONE! I cavi di segnale (i riferimenti in
ingresso, il collegamento seriale, la posizione
resolver, encoder) ed i cavi di potenza DEVONO
essere collegati e scollegati solo quando il
convertitore è SPENTO.
ATTENZIONE! Tensioni pericolose possono
permanere per alcuni minuti sui terminali dei
condensatori. Un contatto con l’alta tensione può
provocare gravi danni fisici.
Cavi di connessione
della Resistenza di
Frenatura
I cavi di collegamento della resistenza di frenatura devono essere in
grado di sopportare alte tensioni ed alte temperature come 600 V e
105°C.
Il cavo raccomandato è “UL 1015 Gauge 14”, e la coppia di serraggio
raccomandata sul connettore di collegamento è pari a 0.9 Nm.
5-8
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 5 – Installazione Elettrica
Requisiti e conformità
agli standard UL
Collegamenti tramite
presa Faston
L’approvazione UL (“UL Listing”) richiede che chi installa un
azionamento debba rispettare alcuni condizioni.
Per i collegamenti a terra l’installatore deve utilizzare un connettore
rapido approvato UL (0.250 pollici o 6.35 mm di larghezza nominale)
su tutti gli azionamenti muniti di prese FASTON.
Sugli azionamenti muniti di terminale di terra a vite, il collegamento
deve avvenire tramite terminali “UL Listed”, approvati UL.
Alimentazione 24 VDC
L’utente finale deve fornire un’alimentazione 24 VDC isolata (per
esempio con un trasformatore d’isolamento) all’ingresso della
alimentazione ausiliaria protetto da fusibile “UL Listed” da 4 A.
Alimentazione
Principale e scelta dei
fusibili UL
Il modello di fusibile raccomandato per le applicazioni con motori è la
classe RK5. Con fusibile di protezione UL tipo RK5, la massima
potenza di cortocircuito della rete non deve superare 5000 Arms ad
una tensione di 480 V.
Sui Servo azionamenti IMC-A-M, i valori dei fusibili devono essere i
seguenti:
Fusibile
Applicazioni
Multiasse
IMC-A-M03
IMC-A-M07
IMC-A-M15
IMC-A-M20
BUSSMANN
Class RK5
Type FRS-R
FRS-R-4
FRS-R-8
FRS-R-20
FRS-R-20
0,3 × ∑
I
1 rated amplif ier
LITTELFUSE
Class RK5
Type FLSR-ID
FLSR2ID
FLSR8ID
FLSR20ID
FLSR20ID
0,3 × ∑
I
1 rated amplif ier
N
N
In un’applicazione multiasse con N azionamenti, i valori dei fusibili sono
calcolati con la formula fornita nella tabella sopra. Tuttavia sui Servo
azionamenti versione IMC-A-M03 e IMC-A-M07 non si deve superare il
valore di 20 A, mentre nelle versioni IMC-A-M15 e IMC-A-M20 non
bisogna superare il valore di 40 A. Vedere anche il paragrafo
successivo Schemi di collegamento con fusibili UL di protezione.
Sui Servo azionamenti IMC-A-E, i valori dei fusibili devono essere i
seguenti:
Fusibile
Applicazioni
Multiasse
IMC-A-E02
IMC-A-E05
IMC-A-E08
BUSSMANN
Class RK5
Type FRN-R
FRN-R-6
FRN-R-6
FRN-R-9
0,3 × ∑
I
1 rated amplif ier
LITTELFUSE
Class RK5
Type FLNR-ID
FLNR6ID
FLNR6ID
FLNR9ID
0,3 × ∑
I
1 rated amplif ier
N
N
In un’applicazione multiasse con N azionamenti, la scelta dei fusibili
avviene tramite la formula fornita nella tabella sopra. Tuttavia, il valore di
20 A non deve essere superato sui Servo azionamenti versione IMC-AE. Vedere anche il paragrafo successivo Schemi di collegamento con
fusibili UL di protezione.
Manuale di Installazione IMC-A - MANIU22.0605 I
5-9
Capitolo 5 – Installazione Elettrica
Schemi di
collegamento con
fusibili UL di
protezione
L’installazione deve essere eseguita secondo le tabelle del paragrafo
precedente Alimentazione Principale e scelta dei fusibili UL.
IMC-A-E Conforme UL
IMC-A-E
Conforme UL
Nota.
L’installatore dell’azionamento deve utilizzare
un connettore rapido “UL Listed” per la messa
a terra (0.250 pollici o 6.35 mm di larghezza
nominale).
Per i cablaggi di campo utilizzare solo
conduttori di rame.
La coppia di serraggio dei morsetti deve
essere valutata in base al morsetto
“Recognized” utilizzato.
5-10
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 5 – Installazione Elettrica
IMC-A-M Conforme UL
IMC-A-M
Conforme UL
*
IMC-A-M03: UREP100200
IMC-A-M07: UREP200050
IMC-A-M15 e IMC-A-M20: UREP280033
** 10 A per IMC-A-M03 e IMC-A-M07
20 A per IMC-A-M15 e IMC-A-M20
Nota.
L’installatore dell’azionamento deve utilizzare
un connettore “UL Listed” per la messa a terra
(0.250 pollici o 6.35 mm di larghezza
nominale).
Per i cablaggi di campo utilizzare solo
conduttori di rame.
La coppia di serraggio dei morsetti deve
essere valutata in base al morsetto
“Recognized” utilizzato.
Manuale di Installazione IMC-A - MANIU22.0605 I
5-11
Capitolo 5 – Installazione Elettrica
IMC-A
Installazione UL
IMC-A
La figura seguente mostra un esempio di collegamento per
un’applicazione multiasse conforme all’UL.
IMC-A
Applicazione
multiasse conforme
UL
*** Alimentazione
principale
Per la scelta del fusibile, vedi
paragrafo precedente Alimentazione
principale e scelta dei fusibili UL
*** IMC-A-E: 3 x 230 V
IMC-A-M: 3 x 400 V
5-12
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 6 – Messa in servizio
Introduzione
Questo capitolo illustra la messa in servizio dei Servo azionamenti
IMC-A.
La messa in servizio deve essere effettuata tramite il software di
programmazione e seguendo le istruzioni fornite in questo manuale.
Software per
l’Impostazione
Parametri
Il software di parametrizzazione “ABB AC BRUSHLESS
SERVODRIVES VISUAL SETUP” è lo strumento per la messa in
servizio dei Servo azionamenti IMC-A; è compatibile con il sistema
operativo WINDOWS® e permette una facile modifica di tutti i
parametri del convertitore.
Questo software è descritto nel manuale ABB AC BRUSHLESS
SERVODRIVES VISUAL SETUP.
ATTENZIONE!
La procedura di taratura automatica (Auto-tuning)
dovrebbe essere eseguita in modalità di controllo da
PC ed a motore fermo. Se l’auto-taratura deve
essere eseguita con azionamento controllato da
ingresso analogico “CV”, il riferimento in ingresso
DEVE essere pari a 0 Volt. È responsabilità
dell’utente eseguire tutte le azioni necessarie al fine
di ridurre il rischio dovuto a movimenti incontrollati
dell’asse durante la procedura di Auto-tuning.
Configurazione
Standard del
Convertitore
I convertitori IMC-A sono configurati per i Servomotori ABB della serie
8C.
Vedere Appendice A per l’adattamento del convertitore ad altri tipi di
motore o di resolver.
Manuale di Installazione IMC-A - MANIU22.0605 I
6-1
Capitolo 6 – Messa in servizio
Prima Accensione
Molto Importante
Controllare i collegamenti, in particolare del 24 VDC e
dell’alimentazione principale.
Ci sono due differenti versioni dei convertitori: alimentazione a 230 VAC
ed a 400 VAC, Servo azionamenti modello IMC-A-E ed IMC-A-M
rispettivamente. Verificare il modello sull’etichetta del convertitore. Deve
essere conforme alla tensione di alimentazione a disposizione. Un
convertitore versione 230 VAC alimentato con tensione 400 VAC
sarà danneggiato irreparabilmente.
Controllare la taglia della resistenza di frenatura:
-
UREP100100 per IMC-A-E
-
UREP100200 per IMC-A-M03
-
UREP200050 per IMC-A-M07
-
UREP280033 per IMC-A-M10, IMC-A-M15 e IMC-A-M20.
Collegare ai convertitori IMC-A-M03 una resistenza di frenatura
inferiore a 200 Ω danneggerà inevitabilmente il sistema di frenatura.
Il segnale “ENABLE” (connettore “X2”, pin 20) deve essere disattivato
e l’ingresso analogico “CV” (connettore “X2”, pin 16/17) deve essere
cortocircuitato.
Verificare le messe a terra siano corrette ed i collegamenti degli
schermi siano a 360°.
ATTENZIONE!
Durante la taratura della macchina, collegamenti
errati o l’errata impostazione di alcuni parametri
potrebbero provocare movimenti pericolosi
dell’asse. È responsabilità dell’utente eseguire tutte
le azioni necessarie al fine di ridurre i rischi dovuti a
movimenti incontrollati dell’asse durante la
presenza di operatori nell’area interessata.
Accendere
l’alimentazione 24 VDC
6-2
Il LED verde “ON” sul pannello frontale deve essere acceso.
L’errore “UNDERVOLT.” deve essere visualizzato.
Il contatto relè “AOK” (pin 18 e 19 del connettore “X2”) risulta
chiuso. Successivamente è possibile controllare il relè di
potenza secondo gli Schemi di Collegamento del Capitolo 5 di
questo manuale.
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 6 – Messa in servizio
Accendere
l’alimentazione
principale
L’alimentazione principale è 230 VAC o 400 VAC a seconda della
versione di servo azionamento.
Usare lo schema di collegamento dell’alimentazione principale tenendo
conto del segnale relè “AOK”.
Il LED rosso “UNDERVOLT.” deve scomparire dopo pochi secondi.
Il convertitore è pronto per la messa in servizio attraverso il software
“ABB AC BRUSHLESS SERVODRIVE VISUAL SETUP” (vedere i
paragrafi successivi ed il manuale ABB AC BRUSHLESS
SERVODRIVE VISUAL SETUP).
ATTENZIONE! Il convertitore deve sempre essere
acceso nel seguente ordine:
Accendere l’alimentazione 24 V
Attendere la chiusura del contatto “AOK”
Accendere l’alimentazione principale
Altrimenti, si possono causare danni fisici e
materiali.
ATTENZIONE! È obbligatorio attendere almeno 30
secondi tra lo spegnimento e la riaccensione del
convertitore.
Manuale di Installazione IMC-A - MANIU22.0605 I
6-3
Capitolo 6 – Messa in servizio
ATTENZIONE! I cavi di segnale del convertitore
(riferimenti in ingresso, collegamento seriale, resolver,
encoder, HES) così come i cavi di alimentazione devono
essere connessi e disconnessi a convertitore spento.
Messa in servizio e
Taratura
dell’azionamento
Comunicazione via
Collegamento Seriale
Collegare il cavo di collegamento seriale RS 232 tra PC e convertitore.
L’ingresso “ENABLE” deve essere disattivato e l’ingresso analogico
“CV” deve essere mantenuto in cortocircuito.
Accendere il convertitore e avviare il software “ABB AC BRUSHLESS
SERVODRIVE VISUAL SETUP” su PC WINDOWS®.
Se sullo schermo appare il messaggio “No serial communication
found”, premere “OK” e verificare che:
6-4
-
il convertitore sia acceso (il LED “ON” deve essere acceso),
-
il convertitore e il PC sono collegati correttamente tramite il
cavo di collegamento RS 232,
-
le impostazioni del software (“Com. port” e “Baudrate”) sono
corrette.
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 6 – Messa in servizio
Configurazione del
Sensore di
Retroazione
La configurazione del sensore di retroazione motore è selezionabile da
software e viene memorizzata nella memoria EEPROM del convertitore.
La configurazione standard è retroazione sensore revolver.
Per servomotori equipaggiati con sensore di posizione encoder,
procedere segue:
per prima cosa selezionare il tipo di encoder nel menu
“Feedback Configuration”;
successivamente selezionare “Encoder Feedback” e
confermare la selezione.
Se il motore è dotato di sensori ad effetto Hall (HES): verificare che
l’ingresso “ENABLE” sia disattivo e che il convertitore sia acceso;
muovere il motore a mano fino a compiere un giro completo, o un
passo polare se è un motore lineare. Se l’errore “HES” viene
visualizzato, spegnere il convertitore e prima di riaccenderlo verificare
che:
Gli HES siano collegati correttamente al convertitore “X3” (se si
stanno utilizzando tipi di HES a 60°, controllare le varie
combinazioni di cablaggio di segnali HES fino a trovare il giusto
ordine di cablaggio).
Il valore della tensione di alimentazione HES è corretto.
Il valore del parametro della “Motor encoder resolution” è
corretto.
Se i sensori HES non funzionano correttamente, selezionare il tipo
“Incremental encoder” (senza HES) nel menu “Feedback Configuration”
ed avviare la messa in servizio del convertitore in questa
configurazione.
Se il motore è equipaggiato con un encoder Sin/Cos assoluto monogiro
(Heidenhain ERN 1085 o compatibile), verificare che l’ingresso
“ENABLE” sia disattivo e che il convertitore sia acceso; muovere il
motore a mano fino a compiere un giro completo. Se viene visualizzato
l’errore “HES”, spegnere il convertitore e prima di riaccenderlo verificare
che:
I canali di commutazione dell’encoder Sin/Cos sono collegati
correttamente al connettore “X3”.
Il valore della tensione di alimentazione dell’encoder Sin/Cos è
corretto.
Il valore del parametro “Motor encoder resolution” è corretto.
Eseguire il comando “Save parameters to EEPROM” prima di
spegnere il convertitore per salvare la configurazione della retroazione.
Manuale di Installazione IMC-A - MANIU22.0605 I
6-5
Capitolo 6 – Messa in servizio
Regolazione del
Convertitore
Selezionare l’esatto tipo di motore nella “Motor List”.
Verificare che i parametri “Current Limitation” siano adeguati
alle specifiche del motore e del convertitore.
Per la messa in servizio, si raccomanda la modalità “I2t fusing”.
(vedere Appendice A).
Se per il sensore di retroazione è stata selezionata la
configurazione “Incremental encoder without HES”, avviare la
“Auto-phasing procedure”, procedura di autofasatura del
motore.
La “Auto-phasing procedure” del motore può essere avviata
nella finestra di commando del software VISUAL SETUP o
tramite l’attivazione dell’ingresso “CV0”.
Se il motore adoperato per l’applicazione non è presente
nell’elenco “Motor List”, selezionare il comando “New motor” e
seguire le istruzioni.
Verificare che i parametri “Speed Limitation” siano compatibili
con le specifiche del motore.
Selezionare la “Encoder output resolution” per chiudere l’anello
di posizione con il NC.
Accoppiare il motore al suo carico e selezionare il regolatore di
velocità (“P”, “PI” o “PI2”). Nel caso di asse con carico verticale,
vedere il paragrafo Regolazione dell’Anello di Velocità con
Carico Verticale.
Assicurarsi che la rotazione dell’albero motore non sia
pericolosa per l’operatore ed avviare la “Auto-tuning
procedure”, procedura di auto-taratura.
ATTENZIONE!
La procedura di “Auto-tuning” dovrebbe essere
eseguita in modalità di controllo da PC e a motore
fermo. Se la procedura di “Auto-tuning” deve essere
eseguita con controllo da ingresso analogico “CV”,
il valore del riferimento analogico DEVE essere pari
a 0 Volt. È responsabilità dell’utente eseguire tutte le
azioni necessarie al fine di ridurre il rischio dovuto a
movimenti incontrollati dell’asse durante la
procedura di “Auto-tuning”.
6-6
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 6 – Messa in servizio
Regolazione Parametri
per un Motore Lineare
In caso di rumorosità all’interno del motore sia da fermo sia in
movimento, verificare la rigidità della trasmissione tra motore e
carico (giochi ed elasticità degli ingranaggi e dei giunti). Se
necessario, ripetere la procedura di “Auto-tuning” selezionando
“Low bandwidth”. Se il problema persiste, ripetere l’“Auto-tuning”
selezionando il filtro “Antiresonance filter”.
Per compensare l’offset sull’ingresso analogico, avviare la
funzione “Offset compensation” oppure avviare la stessa
procedura premendo il pulsante “Offset” posto sul pannello
frontale del convertitore.
Verificare che il motore si muova correttamente in entrambe le
direzioni in modalità “Digital speed input command”. Se
necessario, aggiustare i guadagni del regolatore di velocità con
il pulsante “Stability”.
Il parametro “Motor encoder resolution” viene calcolato come descritto
di seguito:
N
S
N
S
N
S
Motor magnets
Pole pitch
Motor pole pitch [mm]
Motor encoder resolution = 1000 x
Encoder signal pitch [μm]
Nota.
“1 encoder-signal-pitch” = “4 counting-increments”.
Il valore del parametro “Maximum speed” del motore, espresso in giri
al minuto, viene calcolato secondo la seguente formula:
1000
Maximum speed [rpm] = 60 x
x Maximum motor speed [m/s]
Motor pole pitch [mm]
Il valore di velocità lineare espresso in m/s viene calcolato secondo la
seguente formula:
Motor speed [rpm]
Linear speed [m/s] =
60
Manuale di Installazione IMC-A - MANIU22.0605 I
Motor pole pitch [mm]
x
1000
6-7
Capitolo 6 – Messa in servizio
Regolazione
dell’Anello di Velocità
con Carico Verticale
Salvataggio dei
parametri del
Convertitore
6-8
Nota.
In caso di asse con carico sbilanciato (coppia
costante dovuta all’effetto della gravità sull’asse
verticale), la configurazione “Incremental encoder
without HES” non è valida poiché la procedura di
fasatura del motore non può essere eseguita
all’accensione.
Per inizializzare i guadagni dell’anello di velocità avviare la
“Auto-tuning procedure” con il motore scollegato dal carico.
Selezionare la modalità “Limiting” della funzione I2t (vedere
Appendice A, Protezione I2t). Successivamente selezionare il
regolatore di velocità (“PI” o “PI2”). Accoppiare il motore al
carico e muovere il motore con il comando digitale di velocità
fino a raggiungere una posizione di stallo accertandosi che la
rotazione dell’albero motore non sia pericolosa per
l’operatore e per la macchina.
Quindi eseguire il comando “Auto-tuning procedure” con il
motore abilitato e in posizione di stallo (riferimento di velocità
zero). In caso di rumorosità all’interno del motore sia da fermo
sia in movimento, verificare la rigidità della trasmissione tra
motore e carico (giochi ed elasticità degli ingranaggi e dei
giunti). Se necessario, ripetere la procedura di “Auto-tuning”
selezionando “Low bandwidth”. Se il problema persiste, ripetere
l’“Auto-tuning” selezionando il filtro “Antiresonance filter”.
Salvare tutti i parametri nella EEPROM del convertitore con il comando
“Save parameters to EEPROM”.
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 6 – Messa in servizio
Fasatura del Motore
con alimentazione
attiva
Nella configurazione “Incremental encoder without HES”, la procedura
di fasatura del motore “Phasing procedure” deve essere eseguita ad
ogni accensione secondo il seguente diagramma dei segnali:
AOK
Accensione
ENABLE
CV0
PHASING OK
Accensione
Fasatura in corso
Pronto
Fine accensione
Avvio fasatura
In movimento
Arresto
Fine fasatura
Avvio
Nota.
In caso di un asse con carico sbilanciato (coppia
costante dovuta all’effetto della gravità sull’asse
verticale), la “Incremental encoder configuration
without HES” non è valida. Il motore deve essere
dotato di un encoder incrementale + HES o di un
encoder assoluto Sin/Cos.
Nota.
Nella configurazione “Incremental encoder without
HES”, la procedura di autofasatura del motore
deve essere ripetuta dopo un Errore “FEEDBACK”
o dopo un Errore “COUNTING”. L’autofasatura del
motore deve essere ripetuta anche dopo la
modifica dei parametri del motore o dell’encoder.
Manuale di Installazione IMC-A - MANIU22.0605 I
6-9
Capitolo 6 – Messa in servizio
Applicazione con
Emulazione del Motore
Passo- Passo
L’emulazione del motore passo-passo è possibile solamente con
motori dotati di resolver. I segnali “PULSE” e “DIRECTION” vengono
forniti all’ingresso secondo sensore di posizione del convertitore, sui
pin dell’encoder TTL.
Selezionare “Stepper emulation” nella finestra “Position sensor
configuration”.
Selezionare la modalità “Position” e lanciare la “Autotuning
procedure”.
Nota.
La stabilità dell’anello di posizione può
essere facilmente collaudata in modalità “PI2
Speed” poiché i guadagni di retroazione
sono identici a quelli in modalità “Position”.
Inserire il valore del parametro “Position resolution” nella
finestra “Scaling” come mostrato qui sotto:
“Position resolution” = 2 x “number of pulses”
(emesso dal regolatore per un giro motore)
6-10
Porre a 0 il valore dei parametri “Position deadband”. Questo
parametro è utile solamente per applicazioni con elevati giochi
di trasmissione o con elevate frizioni sull’asse. In tali casi,
quando il valore dell’errore di posizione allo stallo è inferiore al
valore del parametro “Position deadband”, il guadagno
proporzionale dell’anello di posizione è posto a 0.
Abilitare il convertitore e controllare lo spostamento dell’asse
durante l’esecuzione del programma macchina.
Se l’asse non si muove, verificare che l’ingresso “CV0” sia
disattivato.
Se durante lo spostamento dell’asse la rumorosità del motore è
elevata, allora il guadagno “Feedforward acceleration” deve
essere posto a 0.
Se il motore si muove nella direzione sbagliata, selezionare il
comando “Reverse movement” nella finestra “Speed limit”.
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 6 – Messa in servizio
Applicazione Asse
Elettrico
L’ applicazione software asse elettrico richiede l’utilizzo del secondo
sensore di posizione del convertitore per acquisire gli spostamenti
dell’asse principale.
Se il motore è dotato di resolver, nel riquadro “Encoder input
configuration” della finestra di “Position sensor configuration”
selezionare il tipo di encoder adoperato come secondo
sensore.
Quando l’encoder principale è di tipo SinCos, adattare il
parametro “Position scaling factor” nella finestra “Second
sensor” per aumentare la risoluzione della misura di posizione.
Altrimenti, porre a 1 il valore del parametro “Position scaling
factor”.
Eseguire il comando “Auto-tuning” selezionando la modalità
“Position”.
Nota.
La stabilità dell’anello di posizione può
essere testate modalità “PI2 Speed” poiché i
guadagni di retroazione sono identici a quelli
in modalità “Position”.
Quando il sensore principale è un encoder, calcolare il valore
del parametro “Position resolution” nella finestra “Scaling”,
come descritto di seguito:
“Position resolution” = (4 x “number of encoder pulses” / “channel for one axis
revolution of the master encoder” x “Position scaling factor”) / “Reduction Ratio”.
dove:
“Reduction ratio” = “Motor speed” / “Master encoder speed”
Quando il sensore principale è un resolver, calcolare il valore
del parametro “Position resolution” nella finestra “Scaling”,
come descritto di seguito:
“Position resolution” = (65536 x “Position scaling factor”) / “Reduction ratio”
“Reduction ratio” = “Motor speed” / “Master resolver speed”
Manuale di Installazione IMC-A - MANIU22.0605 I
6-11
Capitolo 6 – Messa in servizio
6-12
Porre a 0 il valore del parametro “Position deadband”. Questo
parametro è utile solamente per applicazioni con elevati giochi
di trasmissione o con elevate frizioni sull’asse. In tali casi,
quando il valore dell’errore di posizione allo stallo è inferiore al
valore del parametro “Position deadband”, il guadagno
proporzionale dell’anello di posizione è posto a 0.
Abilitare il convertitore e verificare che l’asse slave segua
effettivamente lo spostamento dell’asse principale con rapporto
di trasmissione corretto.
Se l’asse non segue lo spostamento dell’asse principale,
controllare che l’ingresso “CV0” sia disattivato.
In caso di elevata rumorosità del motore durante il moto
dell’asse, porre a 0 il guadagno “Feedforward acceleration”. Se
il sensore principale è un encoder SinCos, verificare nella
finestra “Second sensor” che il comando “Pulse interpolation”
sia attivo.
Se la direzione di moto non è corretta, selezionare il comando
“Reverse position” nella finestra “Second sensor” oppure
“Reverse movement” nella finestra “Speed limit”.
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 7 – Ricerca guasti
Introduzione
Questo Capitolo illustra le cause d’errore più comuni che potrebbero
verificarsi dopo e durante la messa in servizio e come eliminarle.
Errori
Errore di Sistema
Errore “BUSY”
Se il LED rosso “SYS” si illumina quando il convertitore è acceso, la
scheda logica non è operativa.
Verificare che i 4 LED d’errore siano lampeggianti. In questo
caso, caricare il firmware del convertitore tramite il
collegamento seriale con il software VISUAL SETUP.
Verificare che non sia presente polvere conduttrice che possa
provocare cortocircuiti sulla scheda logica del convertitore.
Se l’errore “BUSY” è visualizzato dopo aver acceso il
convertitore, la procedura di “AUTOTEST” è fallita e il
convertitore non è pronto per il funzionamento. Verificare che
l’alimentazione principale non sia attiva prima
dell’alimentazione ausiliaria a 24 V (vedere gli Schemi di
collegamento).
Se l’errore “BUSY” è visualizzato durante l’esecuzione della
procedura di autofasatura del motore tramite comando “CV0”
all’accensione (configurazione “Incremental encoder without
HES”), la procedura di fasatura automatica del motore è fallita
per cause esterne e il valore di fase calcolato è errato. Verificare
che il valore di parametro “Motor encoder resolution” sia
corretto. Verificare il valore dei parametri “Motor parameters”
(“Pole pairs” e “Phase order”). Verificare che l’ingresso
“ENABLE” sia attivo. Verificare che gli ingressi dei fine corsa
non siano attivi. Verificare che il motore non sia bloccato e che il
movimento dell’albero sia libero durante l’esecuzione della
procedura.
Se l’errore “BUSY” è visualizzato durante l’esecuzione della
funzione “Auto-phasing procedure”, la procedura di fasatura
automatica del motore è fallita per cause esterne ed i parametri
calcolati sono errati. Verificare che l’ingresso “ENABLE sia
attivo. Verificare che gli ingressi dei fine corsa non siano attivi.
Verificare quindi che il motore sia scollegato dal carico e che il
movimento dell’albero sia libero durante la procedura.
Manuale di Installazione IMC-A - MANIU22.0605 I
7-1
Capitolo 7 – Ricerca Guasti
Se l’errore “BUSY” è visualizzato durante l’esecuzione della
funzione “Auto-tuning procedure”, la procedura di taratura
automatica dei guadagni è fallita per cause esterne ed i
parametri calcolati sono errati. Verificare che l’ingresso
“ENABLE” sia attivo. Verificare che gli ingressi dei fine corsa
non siano attivi. Verificare quindi che il movimento dell’albero sia
libero durante la procedura.
Se l’errore “BUSY” è visualizzato durante l’esecuzione della
funzione “Offset Compensation”, l’offset supera il valore di 0.5
Volt. Verificare il valore della tensione sull’ingresso “CV”
durante la procedura.
Se l’errore “BUSY” è visualizzato durante l’esecuzione della
funzione “Cogging torque acquisition”, la procedura è fallita per
cause esterne e il rilevamento dell’ondulazione di coppia
(cogging torque) non è valido. Verificare che l’ingresso
“ENABLE” sia attivo. Verificare che gli ingressi “CI” e “CV0” non
siano attivi. Verificare che gli ingressi dei fine corsa non siano
attivi. Verificare che l’encoder fornisca un impulso di zero per
ogni giro motore. Verificare che il motore sia scollegato dal
carico e che il movimento dell’albero sia libero durante
l’esecuzione della procedura. Verificare che il valore della
corrente del motore corrispondente all’effetto ondulazione di
coppia sia inferiore al 5 % della corrente nominale del
convertitore.
Errore “EEPROM”
Se l’errore persiste, la memoria EEPROM non è inizializzato
correttamente (CHECKSUM) oppure non è compatibile con la versione
software del convertitore. Contattare il Servizio di Assistenza.
Errore “°C Motor”
Se l’errore si presenta all’avvio del convertitore:
Modificare il tipo di sensore di temperatura (CTP o CTN) tramite
il software VISUAL SETUP. Effettuare il “RESET” dell’errore dal
software VISUAL SETUP. La visualizzazione dell’errore “°C
MOTOR” deve scomparire.
Verificare il collegamento tra il sensore di temperatura e il
connettore “X1” posto sul pannello frontale del convertitore.
Se l’errore si presenta durante il ciclo operativo:
7-2
Verificare la temperatura del motore e cercare la causa del
surriscaldamento (sovraccarico dell’albero meccanico, ciclo
operativo troppo elevato, motore sottodimensionato rispetto al
ciclo della macchina…).
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 7 – Ricerca Guasti
Errore “UNDERVOLT.”
(non-memorizzato)
Quando si accende l’alimentazione ausiliaria a 24 VDC, il convertitore
IMC-A visualizza sempre l’errore “UNDERVOLT.”. L’errore
“UNDERVOLT.” scompare fornendo l’alimentazione principale, con un
ritardo di pochi secondi che corrisponde al “soft-start” dei condensatori
di potenza.
Se l’errore persiste dopo aver acceso l’alimentazione principale,
verificare che l’alimentazione sia effettivamente presente.
Errore “POWER
STAGE”
L’errore “POWER STAGE” raggruppa tutti i malfunzionamenti dello
stadio di potenza:
-
Sovratensione dell’alimentazione
-
Cortocircuito fase-terra
-
Cortocircuito fase-fase
-
Ventola
-
Cortocircuito stadio di potenza
-
Sovratemperatura stadio di potenza (solo su IMC-A-M)
-
Errore del controllo PWM
-
Errore sull’alimentazione principale
-
Errore del sistema di frenatura: corto circuito del transistor o
ciclo troppo elevato.
Il software VISUAL SETUP consente di individuare l’errore “Power
stage”.
Se l’errore si presenta all’avvio del convertitore:
Controllare la tensione AC sugli ingressi L1 - L2 - L3 del
connettore di potenza “X9”. Il valore misurato deve rientrare nel
seguente range di valori:
-
per IMC-A-E: 196 VAC < VAC < 253 VAC
-
per IMC-A-M: 340 VAC < VAC < 528 VAC
Se l’errore si presenta durante il ciclo operativo:
Controllare il sistema di frenatura durante le fasi di
decelerazione.
Controllare che la taglia del resistore di frenatura sia adeguata
in base alle fasi di decelerazione del motore.
Controllare che la corrente del convertitore sia adeguata in base
alle specifiche della tabella di corrente (vedere Capitolo 2).
Controllare che non ci siano cortocircuiti tra i collegamenti e tra
i morsetti del motore.
Controllare che non ci sia un cortocircuito tra una fase motore e
la terra.
Manuale di Installazione IMC-A - MANIU22.0605 I
7-3
Capitolo 7 – Ricerca Guasti
Errore “FEEDBACK”
nella Configurazione
Retroazione Resolver
Errore “RDC” nella
Configurazione
Retroazione Resolver
Controllare i collegamenti del resolver sul connettore “X1” del
convertitore secondo le descrizioni del connettore.
Verificare che il tipo resolver adoperato sia conforme alle
specifiche del convertitore.
Controllare i collegamenti tra resolver e convertitore.
Se l’errore si presenta all’avvio del convertitore:
Verificare che il tipo resolver adoperato sia conforme alle
specifiche del convertitore.
Se l’errore si presenta durante il ciclo operativo:
Errore “FEEDBACK”
nella Configurazione
Retroazione Encoder
Verificare che il collegamento dello schermo tra resolver e
convertitore siano conforme alle specifiche.
Se si prese questo errore:
Controllare il collegamento dell’alimentazione encoder sul
connettore “X3” del convertitore.
Controllare il collegamento dei canali A e B dell’encoder sul
connettore “X3” del convertitore.
Nota.
7-4
Nella configurazione “Incremental encoder
without HES”, la procedura di fasatura del
motore deve essere ripetuta dopo la rilevazione
dell’errore “FEEDBACK”.
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 7 – Ricerca Guasti
Errore “COUNTING”
nella Configurazione
Retroazione Encoder
Controllare il collegamento dell’impulso di zero sul connettore “X3” del
convertitore. Se l’encoder del motore non fornisce l’uscita impulso di
zero, il canale dell’impulso di zero deve essere disattivato per
cancellare l’errore “COUNTING”. Il canale dell’impulso di zero può
essere disattivato all’interno del convertitore ponendo il parametro
“Zero mark pitch” a 0.
Nota.
Encoder TTL
Incrementale
Quando il canale dell’impulso di zero è stato
disattivato, la protezione sull’errore dei conteggi
encoder non è più attiva. In questo caso,
disturbi sui segnali dell’encoder potrebbero
provocare movimenti incontrollati del motore,
movimenti pericolosi per l’operatore e la
macchina.
Per la configurazione “TTL incremental encoder”:
Controllare che il valore della tensione di alimentazione
dell’encoder sia corretto.
Verificare che i collegamenti di terra encoder-convertitoremotore e i collegamenti dello schermo siano corretti in base ai
suggerimenti del Capitolo 4.
Verificare che le forme d’onda del canale A, del canale B e
dell’impulso di zero Z siano corrette.
Verificare che siano soddisfatte le seguenti condizioni per
calcolare la massima frequenza d’impulso dell’encoder alla
velocità massima del motore:
“Max. motor speed” [rpm] < 60 x 106 / Numero di impulsi dell’encoder al giro
“Max. motor speed” [rpm] < 60 x Limite di frequenza degli impulsi encoder [Hz] /
Numero di impulsi dell’encoder al giro.
Verificare che il valore dei parametri “Motor encoder resolution”
e “Zero mark pitch” sia corretto.
Manuale di Installazione IMC-A - MANIU22.0605 I
7-5
Capitolo 7 – Ricerca Guasti
Verificare che il numero di impulsi dell’encoder tra due impulsi
di zero Z successivi sia uguale al valore della “Motor encoder
resolution” moltiplicato per il valore del parametro “Zero mark
pitch”. Se questa condizione non è soddisfatta, la protezione
sui conteggi dell’encoder deve essere disattivata per poter
annullare l’errore “COUNTING”. La protezione sui conteggio
dell’encoder può essere disattivata ponendo il parametro “Zero
mark pitch” a 0.
Per motori lineari con un solo impulso di zero lungo la corsa
motore, il parametro “Zero mark pitch” deve essere posto a 15.
In questo modo la protezione sui conteggi dell’encoder verifica
che la posizione misurata dall’encoder abbia sempre lo stesso
valore quando si passa per l’impulso di zero (non c’è deriva
della misura di posizione).
ATTENZIONE! Quando la protezione sui conteggi
dell’encoder è disattiva, il convertitore controlla
solamente che la frequenza degli impulsi dell’encoder
sia di 1,5 volte inferiore alla frequenza massima. La
frequenza massima dell’encoder è calcolata all’interno
del convertitore secondo il valore dei parametri “Motor
encoder resolution” e “Maximum speed”. In questo caso,
la rumorosità degli impulsi dell’encoder a frequenze 1,5
volte inferiori alla frequenza massima può provocare
movimenti incontrollati del motore, movimenti pericolosi
per l’operatore e per la macchina.
Nota.
7-6
Nella configurazione “TTL incremental
encoder without HES”, la procedura di
fasatura del motore deve essere ripetuta
dopo l’errore “COUNTING”.
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 7 – Ricerca Guasti
Encoder SinCos
Per la configurazione “Sin/Cos encoder”:
Controllare che il valore della tensione di alimentazione
dell’encoder sia corretto.
Verificare che i collegamenti di terra encoder-convertitoremotore e i collegamenti dello schermo siano corretti in base ai
suggerimenti del Capitolo 4.
Verificare che le forme d’onda del canale A, del canale B e del
riferimento R dell’encoder siano corrette.
Verificare che il valore dei parametri “Motor encoder resolution”
e “Zero mark pitch” sia corretto.
Verificare che il numero d’impulsi dell’encoder tra due segnali di
riferimento R successivi sia uguale al valore di “Motor encoder
resolution” moltiplicato per il valore del parametro “Zero mark
pitch”. Se questa condizione non è soddisfatta, la protezione
sui conteggi dell’encoder deve essere disattivata per poter
annullare l’errore “COUNTING”. La protezione sui conteggi
dell’encoder può essere disattivata ponendo il parametro “Zero
mark pitch” a 0.
Per motori lineari con un solo impulso di riferimento R lungo la
corsa motore, il parametro “Zero mark pitch” deve essere posto
a 15. In questo modo la protezione sui conteggi dell’encoder
verifica che la posizione misurata dall’encoder abbia sempre lo
stesso valore quando si passa per l’impulso di riferimento R
(non c’è deriva della misura di posizione).
Manuale di Installazione IMC-A - MANIU22.0605 I
7-7
Capitolo 7 – Ricerca Guasti
ATTENZIONE! Quando la protezione sui conteggi
dell’encoder è disattiva, il convertitore controlla
solamente che la frequenza degli impulsi dell’encoder
sia di 1,5 volte inferiore alla frequenza massima
dell’encoder. La frequenza massima è calcolata
all’interno del convertitore secondo il valore dei
parametri “Motor encoder resolution” e “Maximum
speed”. In questo caso, la rumorosità degli impulsi
dell’encoder a frequenze 1,5 volte inferiori alla frequenza
massima dell’encoder può provocare movimenti
incontrollati del motore, movimenti pericolosi per
l’operatore e per la macchina.
Nota.
Errore “HES”
Nella configurazione “Sin/Cos encoder
without HES”, la procedura di fasatura del
motore deve essere ripetuta dopo l’errore
“COUNTING”.
Per la configurazione “Incremental encoder & HES”:
Controllare che i sensori Hall (HES) siano collegati
correttamente al connettore “X3” del convertitore (con il tipo di
HES a 60°, verificare le varie combinazioni di cablaggio fino a
trovare il giusto ordine di cablaggio).
Controllare il livello della tensione di alimentazione dei sensori
HES.
Controllare che il valore del parametro “Motor encoder
resolution” sia corretto.
Verificare che i collegamenti di terra HES-convertitore-motore e
i collegamenti dello schermo rispondano ai requisiti del Capitolo
4.
Per la configurazione “Absolute single-turn Sin/Cos encoder”:
7-8
Controllare che i canali di commutazione dell’encoder Sin/Cos
encoder siano collegati correttamente al connettore “X3” del
convertitore.
Controllare il livello della tensione di alimentazione dell’encoder
Sin/Cos.
Controllare l’ampiezza dei segnali del canale C e del canale D
dell’encoder Sin/Cos.
Controllare che il valore del parametro “Motor encoder
resolution” sia corretto.
Controllare che i collegamenti di terra encoder-convertitoremotore e i collegamenti dello schermo rispondano ai requisiti
del Capitolo 4.
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 7 – Ricerca Guasti
Errore “I2T”
Errore “Following”
Servo Azionamento in
modalità SPEED MODE
(“P”, “PI”, “PI²”)
Servo Azionamento in
modalità POSITION
MODE
Verificare che la corrente nominale del convertitore sia
conforme alle specifiche della tabella di corrente (vedere
Capitolo 2).
Verificare che la corrente nominale del convertitore definito dal
parametro “Rated current” sia adeguata alla corrente richiesta
per il ciclo di lavoro.
L’errore “Following”, o di inseguimento, può verificarsi nelle modalità
“SPEED MODE” e “POSITION MODE”.
In modalità “SPEED MODE” l’errore “Following” corrisponde ad un
errore di inseguimento dell’anello di velocità.
Verificare che il carico sia adeguato in relazione al tipo di
motore e convertitore.
Ridurre le accelerazioni/decelerazioni.
Controllare che l’asse non sia bloccato da un fermo meccanico.
Controllare che il valore del parametro “Speed following error
threshold” sia coerente con il ciclo di lavoro. Se necessario,
aumentare il valore di questo parametro.
In “MODALITA’ POSIZIONE” l’errore “Following” corrisponde ad un
errore di inseguimento dell’anello di posizione.
Verificare che il carico sia adeguato in relazione al tipo di
motore e di convertitore.
Ridurre le accelerazioni/decelerazioni.
Controllare che l’asse non sia bloccato da un fermo meccanico.
Controllare la regolazione dell’anello di posizione.
Verificare che il valore del parametro “Speed following error
threshold” sia coerente con il ciclo di lavoro. Se necessario,
aumentare il valore di questo parametro.
Manuale di Installazione IMC-A - MANIU22.0605 I
7-9
Capitolo 7 – Ricerca Guasti
Problemi Operativi
Il motore non si muove
Verificare che il convertitore sia acceso (alimentazione
ausiliaria a 24 VDC accesa).
Verificare che l’alimentazione principale sia attiva.
Verificare i collegamenti del motore.
Verificare il cablaggio dei segnali logici “FC+”, “FC-” e
“ENABLE” (vedere Appendice A).
Il motore è alimentato,
ma non dà coppia
Verificare che i parametri “Maximum current” e “Rated current”
non abbiano valore pari a 0.
Verificare che il convertitore sia in modalità coppia (comando
“CI” attivo su “X2”) e che il riferimento di coppia non sia pari a 0.
Albero bloccato,
oscillazioni irregolari,
o rotazione a velocità
massima
Controllare i collegamenti del resolver o dell’encoder al
rispettivo connettore ed il montaggio meccanico del sensore di
posizione sul motore.
Controllare che il tipo di motore selezionato nell’elenco “Motor
List” sia corretto.
Controllare il valore dei parametri “Motor parameters” nel menu
“Advanced Functions” e, se necessario, ripetere la procedura
“Auto-phasing procedure” con motore scollegato dal carico
(vedere Capitolo 6, Regolazione del Convertitore).
Rotazione Discontinua
del Motore con
intervalli a coppia
nulla
Verificare il collegamento dei 3 cavi di fase tra motore e
convertitore.
Deriva del Motore con
comando analogico di
velocità pari a zero
Verificare che il collegamento del segnale di comando
analogico tra il controllore e il convertitore risponda ai requisiti
del Capitolo 4 (il cavo del “CV-” deve essere collegato all’uscita
differenziale bassa del CN e non al terminale 0 V).
Verificare la compensazione dell’offset e, se necessario,
eseguire il comando “Offset compensation”.
7-10
Manuale di Installazione IMC-A - MANIU22.0605 I
Capitolo 7 – Ricerca Guasti
Rumorosità del motore
allo stallo
Verificare che i collegamenti di terra motore-convertitorecontrollore e i collegamenti dello schermo rispondano ai
requisiti del Capitolo 4.
Verificare che il collegamento del commando analogico di
velocità “CV” tra il controllore e il convertitore risponda ai
requisiti del Capitolo 4, e controllare il collegamento degli
schermi del cavo resolver lato motore e lato convertitore.
Rumorosità del motore
in moto ed allo stallo
Verificare la rigidità della catena di trasmissione meccanica tra
motore e carico (gioco e elasticità dei giunti e degli ingranaggi).
Ripetere il comando “Auto-tuning” selezionando una larghezza
di banda inferiore (“Medium” o “Low”).
Se il problema persiste, ripetere la procedura di “Auto-tuning”
selezionando il filtro “Antiresonance filter”.
Difficoltà di Controllo
della Posizione da CN
Verificare la presenza di segnali A, B e Z sul connettore “X2”
del convertitore muovendo l’albero motore a mano e verificare il
collegamento tra CN e convertitore.
Verificare la direzione dei conteggi del CN in relazione alla
polarità del comando analogico di velocità. Se risulta invertita,
utilizzare la funzione “Reverse Movement” nel software VISUAL
SETUP per ottenere il funzionamento corretto.
Manuale di Installazione IMC-A - MANIU22.0605 I
7-11
Capitolo 7 – Ricerca Guasti
Assistenza e
Manutenzione
Manutenzione
Quando si sostituisce un convertitore su una macchina, procedere
come segue:
Collegare il “Parameter EEPROM” del vecchio convertitore (o
una sua copia) sul nuovo.
Applicare un riferimento analogico di velocità zero sull’ingresso
“CV” e avviare la procedura automatica “Offset Compensation”
tramite il pulsante posto sul pannello frontale del convertitore.
Il nuovo convertitore ora è configurato come quello vecchio.
Servizio Clienti
Per qualsiasi spiegazione, interventi, o parti di ricambio, prego
contattare direttamente il Servizio Clienti:
ABB Sace S.p.a.
Customer Service
Frazione Stazione Portacomaro, 97/C
I – 14100 ASTI (ITALY)
Telefono +39 0141 276.1
Telefax +39 0141 276.294
Quando si contatta il nostro Servizio Clienti si prega di prendere nota
del codice prodotto e del numero di serie S.N. presente sull’etichetta
del convertitore.
7-12
Manuale di Installazione IMC-A - MANIU22.0605 I
Appendice A – Regolazioni Varie
Posizionamento dei
moduli
Il posizionamento dei componenti interni del convertitore IMC è
predefinito secondo lo schema di montaggio riportato di seguito.
Schema montaggio
componenti interni
Adattamento a Vari
Tipi di Resolver
Per la connessione di resolver, vedere sia il seguente diagramma di
cablaggio del connettore “X1” sia il diagramma del costruttore:
Nota.
Per l’utilizzo di resolver con valori di
trasformazione esterni al range che va da 0,3 a
0,5, l’adattamento deve essere eseguito in
fabbrica in fase di produzione da ABB Sace.
Nota.
Quando si utilizzano resolver con un numero di
paia poli N > 1, tutti i valori di velocità
visualizzati dal convertitore corrispondono a N
volte la velocità di rotazione del motore.
Manuale di Installazione IMC-A - MANIU22.0605 I
A-1
Appendice A – Regolazioni Varie
Adattamento a Vari
Tipi di Motore
I servo convertitori IMC-A sono destinati all’utilizzo con servomotori
brushless AC della Serie 8C prodotti da ABB Sace.
I servo convertitori IMC-A possono essere abbinati con servomotori
brushless AC provenienti da altri costruttori. In questo caso è
necessario sistemare i seguenti parametri.
Sensore Termico di
Motore
Il sensore termico deve essere connesso al connettore “X1” del
resolver, pin 1 e 2.
Il motore può essere equipaggiato o con un sensore “CTN” (resistenza
ohmica = funzione decrescente di T°) o con un sensore “CTP”
(resistenza ohmica = funzione crescente di T°).
Il parametro “Motor T° error threshold” consente di impostare il valore
ohmico (kOhm) del sensore corrispondente al livello di temperatura
previsto per l’intervento della protezione termica del motore.
Il parametro “Motor T° warning threshold” consente di impostare il
valore ohmico (kOhm) corrispondente al livello di temperatura previsto
per l’allarme di protezione termica del motore.
Quando si raggiunge la temperatura d’allarme, l’allarme viene
segnalato sul pannello frontale del convertitore. Quando si raggiunge
la temperatura di intervento, il convertitore viene disabilitato.
Nota.
Quando si utilizza un sensore “CTN”, il
valore ohmico della soglia di allarme sarà
maggiore o uguale al valore ohmico della
soglia di protezione.
Quando si utilizza un sensore “CTP”, il
valore ohmico della soglia d’allarme sarà
minore o uguale al valore ohmico della
soglia di protezione.
Le soglie di protezione predefinite per i sensori termici dei servomotori
ABB sono:
A-2
Sensore PTC: la soglia di intervento è pari a 3,3 kOhms di
resistenza del sensore termico, che corrisponde a 140°C circa.
Sensore NTC: la soglia di intervento è pari a 3,3 kOhms di
resistenza del sensore termico, che corrisponde a 140°C circa.
Manuale di Installazione IMC-A - MANIU22.0605 I
Appendice A – Regolazioni Varie
Protezione I2t
Limitazione di corrente
in “Fusing mode”
La protezione I2t opera in modi diversi a seconda della modalità di limitazione della corrente selezionata: “ imiti mode”, oppure “ imitino mode”.
Se dopo 1 secondo la corrente efficace non è inferiore all’85 % della
corrente nominale “Rated current”, l’errore “I2t” viene rilasciato e il
convertitore disabilitato.
L’intervento della protezione I2t limita la corrente la corrente efficace
del convertitore al valore della corrente nominale “Rated current”.
Il diagramma di limitazione della corrente del convertitore nei casi
estremi (sovraccarico del motore o albero bloccato) è illustrato di
seguito:
La durata della corrente massima prima della limitazione alla corrente
nominale dipende dal valore dei parametri “Rated current” e “Maximum
current”.
Tmax [secondo] = (t2 – t0) = 4 x ( Corrente nominale [A] )2 / ( Corrente massima [A] )2
La durata della limitazione di corrente prima dell’intervento della
protezione dipende anch’essa dal valore dei parametri “Rated current”
e “Maximum current”:
Tlim [secondo] = (t3 – t2) = 1 - 0.7 x ( Corrente nominale [A] )2 / ( Corrente massima [A] )2
Nota.
Queste formule sono valide per un rapporto
( “Maximum current” / “Rated current” ) > 1,5.
Quando tale rapporto è uguale a 1, non vi è
interruzione e la corrente viene limitata al valore
della corrente nominale.
Il segnale “I2t” può essere visualizzato mediante
l’oscilloscopio digitale disponibile nel software
VISUAL SETUP.
“Rated current” [%] = 100 x “Rated current” [A] / “corrente nominale del convertitore” [A]
“Current limitation threshold” [%] = ( “Rated current” [%] )2 / 50
“Converter RMS current” [Arms] = ( valore del segnale I2t [%] x 50 )1/2 x “corrente nominale del
convertitore” [A] / 100
Manuale di Installazione IMC-A - MANIU22.0605 I
A-3
Appendice A – Regolazioni Varie
Limitazione di corrente
in “Limiting mode”
L’intervento della protezione I2t limita la corrente efficace del
convertitore al valore della corrente nominale “Rated current”.
Il diagramma di limitazione della corrente del convertitore è illustrato di
seguito.
La durata della corrente massima prima della limitazione alla corrente
nominale (t2 – t0) è calcolata esattamente come in modalità “Fusing
mode”.
A-4
Manuale di Installazione IMC-A - MANIU22.0605 I
Appendice A – Regolazioni Varie
Protezione sui
Conteggi Encoder
Quando i servomotori sono equipaggiati con retroazione da encoder,
ogni errore nel conteggio degli impulsi encoder genera un errore di
misura della posizione del rotore e può causare movimenti incontrollati
del motore, pericolosi per l’operatore e la macchina. La protezione sui
conteggi dell’encoder disponibile sui convertitori della serie IMC-A
consente di rilevare gli errori di conteggio degli impulsi e disabilita
immediatamente il convertitore per motivi di sicurezza.
La protezione sui conteggi dell’encoder controlla che il numero degli
impulsi encoder tra due successivi impulsi di zero Z (o impulsi di
riferimento R) sia uguale al valore “Motor encoder resolution”
moltiplicato per il valore del parametro “Zero mark pitch”. La protezione
sui conteggi controlla anche che la frequenza degli impulsi encoder sia
inferiore a 1,5 volte la frequenza massima. La frequenza massima
dell’encoder è calcolata all’interno del convertitore in base al valore dei
parametri “Motor encoder resolution” e “Maximum speed”.
Il valore del parametro “Motor encoder resolution” stabilisce il numero
di impulsi encoder (o periodi del segnale encoder) per un giro motore
(per motore rotativo) o per paia poli motore (per un motore lineare).
Il valore del parametro “Zero mark pitch” stabilisce il numero di giri
motore (per motore rotativo) o di paia poli motore (per motore lineare)
tra due successivi impulsi di zero Z (o impulsi di riferimento R).
Per motori rotativi, il parametro “Zero mark pitch” è generalmente
uguale a 1 perché l’encoder ha un solo impulso di zero Z (o impulso di
riferimento R) per giro motore.
Per motori lineari con un solo impulso di zero nell’intera corsa motore,
il parametro “Zero mark pitch” deve essere posto a 15. In questo caso,
la protezione sui conteggi encoder controlla che la posizione misurata
dall’encoder abbia sempre lo stesso valore quando passa per l’impulso
di zero (nessuna deriva della misura di posizione).
Nota.
Manuale di Installazione IMC-A - MANIU22.0605 I
Nella configurazione “Incremental encoder
without HES”, dopo un errore “COUNTING”,
è necessario ripeter la procedura di fasatura
del motore perché il riferimento di posizione
del rotore non è valido per la commutazione
del motore.
A-5
Appendice A – Regolazioni Varie
Protezione sull’Errore
di Posizione
Il funzionamento della protezione sull’errore di posizione selezionando
la modalità “Absolute” nella finestra “Safety limits” è descritto di
seguito.
Following
error
threshold
Position
error
Following error
Comparator
Absolute
value
L’errore dell’anello di posizione è continuamente confrontato con il
valore del parametro “Following error threshold”. Quando l’errore
dell’anello di posizione supera la soglia “Following error threshold”,
viene rilasciato l’errore “Following”, o di inseguimento.
Il funzionamento della protezione sull’errore di posizione selezionando
la modalità “Relative to dynamic model” della finestra “Safety limits” è
descritto di seguito.
Position
reference
Real
position
error
Position loop
model
Theoretical
position error
Following
error
threshold
Comparator
+
Following error
Absolute
value
L’errore effettivo dell’anello di posizione è continuamente confrontato
con il valore teorico di errore dell’anello di posizione dato da un
modello di calcolo. Quando la differenza supera la soglia stabilita dal
parametro “Following error threshold”, viene rilasciato l’errore
“Following”, o di inseguimento. In questa configurazione, tuttavia,
quando la regolazione dell’anello di posizione è effettuata senza
termine di anticipato della velocità (“Feedforward speed gain” = 0) per
ottenere un posizionamento senza oscillazioni nella modalità “Stepper
motor emulation”, è consigliabile impostare una soglia “Following error
threshold” bassissima per rilevare anche il più piccolo errore sull’asse.
A-6
Manuale di Installazione IMC-A - MANIU22.0605 I
Appendice A – Regolazioni Varie
Utilizzo degli
Ingressi di Fine
Corsa “FC”
Il tempo di risposta è di 500 microsecondi.
Quando il convertitore è in controllo di velocità (ingresso logico “CI”
disattivo) o in controllo di coppia (ingresso logico “CI” attivo),
l’attivazione dell’ingresso di fine corsa “FC+” inibisce la rotazione
oraria (CW) del motore, e l’attivazione dell’ingresso di fine corsa “FC-”
inibisce la rotazione antioraria (CCW) del motore. Il motore decelera
con la corrente massima “Maximum current” del convertitore in modo
da frenare nel minor tempo possibile.
ATTENZIONE! La direzione di moto positiva e negativa
dipende dai collegamenti del sensore di retroazione
della posizione (encoder o resolver), ed anche dai
collegamenti del motore. Quindi, prima di montare e
collegare gli ingressi di fine corsa, si raccomanda di
fissare la direzione di moto positiva e negativa del
motore.
Utilizzo dell’Ingresso
“CV0”
Il tempo di risposta è di 500 microsecondi.
Quando il convertitore è in controllo di velocità (ingresso logico “CI”
disattivo), l’abilitazione dell’ingresso “CV0” interrompe la rotazione
dell’asse (il tempo di decelerazione dipende dal valore del parametro
“Accel/Decel time”).
Quando il convertitore è in controllo di coppia (ingresso logico”CI”
attivo), l’abilitazione dell’ingresso “CV0” applica un riferimento
analogico di corrente pari a zero e il riferimento viene mantenuto a
zero finché resta attivo l’ingresso “CV0”.
Utilizzo dell’Uscita
“AOK”
Se si verifica un errore qualsiasi, il convertitore viene disabilitato.
Quando si verifica un errore (eccetto l’errore “UNDERVOLT.”), il
contatto relé “AOK” si apre.
Impiegare il contatto relé “AOK” come descritto nel Capitolo 4,
Specifiche dell’uscita relé “AOK”, in modo da consentire l’inserzione
dell’alimentazione principale dopo la fase di inizializzazione.
Nota.
Manuale di Installazione IMC-A - MANIU22.0605 I
L’errore “UNDERVOLT.” può essere
configurato dal software VISUAL SETUP per
aprire il contatto relé “AOK”.
A-7
Appendice A – Regolazioni Varie
Utilizzo dell’Ingresso
di “RESET”
Per conservare i riferimenti di inizializzazione di posizione anche
quando il convertitore rilevare un errore memorizzato o quando viene
spenta l’alimentazione principale, è consentito cancellare l’errore
mediante l’ingresso di “RESET”, pin 13 del connettore “X2”, senza
spegnere l’alimentazione ausiliaria 24 VDC, ed è possibile mantenere
l’alimentazione 24 VDC mediante una batteria di riserva 24 VDC
(vedere Capitolo 4).
Utilizzo dell’Ingresso
“ENABLE”
L’ingresso “ENABLE” assicura la abilitazione/disabilitazione del
convertitore come mostra il diagramma temporale riportato di seguito:
Utilizzo dell’Uscita
“BRAKE”
Il tipo di freno motore sprovvisto di alimentazione, viene controllato
quando il motore è abilitato (ingresso “ENABLE” attivo e nessun errore
visualizzato).
A-8
Manuale di Installazione IMC-A - MANIU22.0605 I
Appendice A – Regolazioni Varie
Uscite Encoder
Incrementale
I due canali A e B in quadratura insieme ad un impulso di zero Z per giro
motore permettono di chiudere l’anello di posizione all’interno del CN.
Il parametro “Output encoder resolution” deve essere impostato
secondo la seguente tabella:
Maximum motor speed [rpm]
Fino a
1600
Fino a
3200
Fino a
6400
Fino a
12800
Fino a
25000
Encoder output resolution [ppr]
da 512
a 16384
da 512
a 8192
da 512
a 4096
da 512
a 2048
da 512
a 1024
La risoluzione stabilita dal parametro “Output encoder resolution” si
può dividere per 2, 4 o 8 modificando il parametro “Resolution division
ratio”.
Il parametro “Output encoder deadband” introduce una zona morta
intorno alla posizione resolver allo stallo in modo da evitare le
oscillazioni +/- 1 del fronte di salita dei canali encoder A e B. Il valore
4095 corrisponde a 1/16 del giro motore.
Il parametro “Zero pulse origin shift” permette di sfasare la posizione
dell’impulso di zero sul canale Z rispetto alla posizione zero del
resolver. Il valore 32767 corrisponde ad un giro motore. L’ampiezza
dell’impulso di zero equivale a 1/4 del periodo dei canali A e B.
Manuale di Installazione IMC-A - MANIU22.0605 I
A-9
Appendice A – Regolazioni Varie
Utilizzo dell’Ingresso
“External Current
Limitation”
L’ingresso analogico “ILIM” (0 ÷ 10 V) consente la regolazione
dinamica di coppia, ossia: coppia massima applicando una tensione di
0 V; coppia via via ridotta da 0 V in su; coppia nulla applicando 10 V.
Selezionando l’opzione “Analog current limit reversal” nella finestra
“Current limit” si inverte la polarità di questo ingresso, ossia: coppia
nulla per tensione pari a 0 V; coppia massima applicando una tensione
di 10 V.
La configurazione predefinita è “Analog current limit reversal” non
selezionata. In questo caso, non c’è alcuna limitazione di coppia per 0
V applicati all’ingresso “ILIM”, quindi la coppia massima è disponibile
quando l’ingresso “ILIM” non è connesso.
Indirizzamento del
Convertitore
mediante RS232
I convertitori IMC-A permettono una connessione multi-asse con un PC
supervisore mediante il collegamento seriale RS-232 secondo il
seguente schema di connessione.
La connessione delle varie unità (PC supervisore e convertitori) è fatta
ad anello: il segnale di trasmissione (TxD) di ciascuna unità è connesso
al segnale di ricezione (RxD) dell’unità seguente. Ogni convertitore IMCA dispone di 4 micro-interruttori per l’assegnazione di un indirizzo. I
convertitori IMC-A collegati all’anello devono avere indirizzi diversi. Nella
configurazione multi-asse l’indirizzo deve essere compreso tra 1 e 15.
L’indirizzo 0 corrisponde alla configurazione di comunicazione monoasse
(nessun indirizzo).
La connessione ad un convertitore con indirizzo “X” viene fatta
selezionando il numero di indirizzo del convertitore nel menù “Setup” del
software VISUAL SETUP.
A-10
Manuale di Installazione IMC-A - MANIU22.0605 I
Appendice A – Regolazioni Varie
Indirizzamento del
Convertitore
mediante RS422
I convertitori IMC permettono una connessione multi-asse con un PC
supervisore mediante il collegamento seriale RS-422 secondo il
seguente schema di connessione.
Tutti i convertitori sono connessi al computer in parallelo.
I segnali di ricezione dei convertitori (RxD) sono connessi al segnale di
trasmissione del computer (TxD).
I segnali di trasmissione dei convertitori (TxD) sono connessi al
segnale di ricezione del computer (RxD).
Ogni convertitore IMC dispone di 4 micro-interruttori per
l’assegnazione di un indirizzo. I convertitori IMC-A collegati al
computer principale devono avere indirizzi diversi. Nella configurazione
multi-asse l’indirizzo deve essere compreso tra 1 e 15. L’indirizzo 0
corrisponde alla configurazione di comunicazione monoasse (nessun
indirizzo).
La connessione ad un convertitore con indirizzo “X” viene fatta
selezionando il numero di indirizzo del convertitore nel menù “Setup”
del software VISUAL SETUP.
Manuale di Installazione IMC-A - MANIU22.0605 I
A-11
Appendice A – Regolazioni Varie
Compensazione
della Coppia di
Cogging
La coppia di cogging nei motori brushless rotativi e lineari a magneti
permanenti deriva dall’interazione tra i magneti del rotore e le cave
dello statore. Questo disturbo è dovuto alla differenza di riluttanza tra il
rame delle bobine e i denti dello statore. Per un determinato motore,
l’effetto del cogging può essere facilmente riconosciuto muovendo a
mano il motore quando il convertitore è disabilitato. L’opzione “Cogging
torque compensation” disponibile sui convertitori della serie IMC-A
permette di compensare ed annullare l’effetto del cogging del motore
per specifiche applicazioni dove si richiedono una precisione di coppia
o di momento maggiori dell’1 % .
Questa opzione dei convertitori IMC-A per la compensazione del
cogging deve essere installata in fabbrica. Controllare la presenza
dell’opzione di compensazione di dentatura nel menù opzioni del
VISUAL SETUP. In questo caso, la funzione “Cogging torque
compensation” si può selezionare nella finestra “Servo loop”.
Nota.
Per un motore brushless equipaggiato con
encoder incrementale, l’opzione “Cogging
torque compensation” è disponibile soltanto
se l’encoder fornisce un impulso di zero per
ogni giro di motore.
La procedura di acquisizione dell’effetto cogging si avvia mediante il
pulsante “Start”. Il motore deve essere scollegato dal carico e l’albero
non dev’essere disturbato durante la procedura. Prima di avviare
l’acquisizione, porre l’azionamento in modalità di controllo manuale e
poi disabilitarlo (Controllo d’azionamento impostato su “Off”). Quindi,
avviare la “Autotuning procedure” con i seguenti parametri:
-
“Regulator” posto su “PI²”
-
“Filter” posto su “Max. stiffness”
-
“Bandwidth” posto su “High”.
Alla fine della procedura di acquisizione della coppia di cogging, è
possibile salvare un file parametri del convertitore (*.PAR) che può
essere riutilizzato per ripristinare le impostazioni iniziali.
La funzione “Enable cogging torque compensation” permette la messa
in servizio della compensazione dell’effetto cogging del motore. Questa
funzione è salvata nella EEPROM del convertitore.
Dopo la procedura di acquisizione, la funzione “Save cogging torque
data into a file” permette di memorizzare nel PC il valore di coppia di
cogging corrispondente al motore adoperato (file *.COG).
La funzione “Write cogging torque data into the drive” permette di
caricare nel convertitore il valore di coppia di cogging corrispondente
ad un determinato motore, se questo valore è stato precedentemente
memorizzato nel PC (file*.COG).
A-12
Manuale di Installazione IMC-A - MANIU22.0605 I
Appendice A – Regolazioni Varie
Nota.
Per un motore brushless equipaggiato con
encoder incrementale, all’accensione del
convertitore la compensazione dell’effetto
cogging è operativa soltanto dopo la
rilevazione del primo impulso di zero
dell’encoder.
Nota.
Il valore della coppia di cogging del motore
viene controllato all’accensione del
convertitore. Se è errato (problemi di
memorizzazione nella memoria del
convertitore) viene visualizzato l’errore
“EEPROM” e la funzione “Enable cogging
torque compensation” disattivata.
Nota.
Quando si sostituisce un convertitore su un
asse, il file parametri di regolazione (*.PAR)
così come il file della coppia di cogging
(*.COG) corrispondenti al motore devono
essere ricaricati.
Nota.
Quando si sostituisce il motore o quando si
scollega il sensore di resolver, la procedura
di acquisizione deve essere ripetuta.
Manuale di Installazione IMC-A - MANIU22.0605 I
A-13
Appendice A – Regolazioni Varie
Sistema di
Retroazione di
Potenza mediante
Resistenza di
Frenatura
Tutti gli azionamenti IMC sono equipaggiati con un sistema di
retroazione della potenza. Quando il motore decelera con grande
inerzia e alta velocità, l’energia di frenatura viene rigenerata verso
l’azionamento. Questa energia viene dissipata su di una resistenza
chiamata “resistenza di frenatura”.
Per evitare la dissipazione di calore all’interno dell’azionamento, la
resistenza di frenatura è sempre montata all’esterno. Essa deve
essere montata lontano da elementi sensibili ed infiammabili (plastica,
guaine di cavi, ecc.).
Per una retroazione di potenza efficiente da parte di azionamenti in
applicazioni multi-asse, il bus DC (“DC+” e “DC-” del morsetto di
potenza “X9”) può essere connesso in parallelo (vedere lo schema di
collegamento del Capitolo 4, Applicazione Multiasse).
In questo caso, anche le alimentazioni principali devono essere
collegate in parallelo in modo da bilanciare l’assorbimento di corrente
all’interno dei convertitori AC/DC.
Si raccomanda di montare la resistenza di frenatura sull’azionamento
con il valore di corrente nominale più alto.
Un controllo elettronico della potenza dissipata evita il sovraccarico
della resistenza di frenatura. Quindi, se l’energia rigenerata sugli
azionamenti collegati con bus DC in parallelo è troppo elevata, la
tensione del bus DC aumenterà fino al raggiungimento della soglia di
errore “OVERVOLTAGE”. Un seconda resistenza di frenatura deve
quindi essere montata sul secondo asse.
A-14
Manuale di Installazione IMC-A - MANIU22.0605 I
Appendice A – Regolazioni Varie
Codifica dei
convertitori
Cifra
1
2
3
4
5
6
7
8
9 10
Codice
I
M
C
_
_
_
_
_
_
_
11 12
_
_
Servo azionamento IMC
Analogico
CANOpen
PROFIBUS-DP
Device-Net
A
C
P
D
Tensione alimentazione 230V
Tensione alimentazione 400V
E
M
Dimensioni
Revisione
Opzioni
Opzioni speciali
Manuale di Installazione IMC-A - MANIU22.0605 I
A-15
Appendice A – Regolazioni Varie
Questa pagina è stata lasciata volutamente bianca.
A-16
Manuale di Installazione IMC-A - MANIU22.0605 I
SERVO AZIONAMENTI IMC-A
MANIU22.0605 I
ABB Sace S.p.a.
Linea S (Servomotors & Servodrives)
Uffici e Stabilimento
Frazione Stazione Portacomaro, 97/C
I - 14100 Asti
ITALY
Telefone: +39 0141 276 111
Fax:
+39 0141 276 294
E-mail:
[email protected]
Internet:
www.abb.com Servomotors
ABB Sace S.p.a.
Linea S (Servomotors & Servodrives)
Export
Via Luciano Lama, 33
I - 20090 Sesto San Giovanni (MI)
ITALY
Telefone:
+39 02 2414 3562
Fax:
+39 02 2414 3972
E-mail:
[email protected]