Università degli Studi di Firenze
FACOLTA’ DI MEDICINA E CHIRURGIA
Corso di Laurea in Tecniche di Radiologia Medica per
Immagini e Radioterapia
“ RIDUZIONE DEGLI ARTEFATTI DA PROTESI
METALLICHE IN RISONANZA MAGNETICA ”
Tesi di Laurea di:
Mori Virginia
Relatore :
Dott. Alessandro Passeri
Correlatore :
Dott. Giacomo Belli
ANNO ACCADEMICO 2006/2007
1
RINGRAZIAMENTI
Desidero ringraziare il Prof. Alessandro Passeri che mi ha
seguito con particolare attenzione nella stesura della mia tesi, al
Dott. Sandro Santini che mi ha dato l’opportunità di eseguire lo
studio presso la Risonanza Magnetica dell’ospedale di Empoli.
Un particolare ringraziamento è rivolto al TSRM sig. Daniele Di
Feo che mi ha fornito un grande aiuto e una preziosa disponibilità
nello svolgimento della mia tesi.
Ringrazio inoltre i miei genitori, mia sorella e il mio fidanzato
per il loro costante e amorevole sostegno datomi nel corso dei tre
anni.
Inoltre un pensiero e un grandissimo ringraziamento è rivolto
ai miei compagni di università e alla mia Tutor Formativa sig.ra
Simona Francioni che mi ha dato preziosi consigli e un’ ammirevole
sostengo nel corso degli anni fornendoci sempre un saldo punto di
riferimento.
2
“Nelle sfide della vita il colpo perfetto scaturisce dall’intuizione. Ma
possiamo dimenticare la tecnica solo dopo che ci siamo impadroniti
totalmente di essa.”
3
INTRODUZIONE............................................................................6
CAPITOLO 1..................................................................................7
1.1 RISONANZA MAGNETICA NUCLEARE.................................7
1.1.2 PRINCIPI FISICI ..................................................................8
1.1.3 SPIN E MOMENTO MAGNETICO NUCLEARE ..........................................9
1.1.4 INTERAZIONE DEI NUCLEI CON UN CAMPO MAGNETICO STATICO ..............11
1.1.5 ECCITAZIONE A IMPULSI O RADIO FREQUENZA (RF)...........................16
CAPITOLO 2................................................................................29
2.1 LE SEQUENZE......................................................................29
2.1.1 LA SEQUENZA SPIN ECHO (SE).....................................................30
CAPITOLO 3................................................................................39
3.1 ARTEFATTI............................................................................39
3.1.2 ARTEFATTO “WARP AROUND”, DA RIBALTAMENTO.............................43
3.1.3 ARTEFATTO DA “ MOVIMENTO “.....................................................45
3.1.4 ARTEFATTO DA “ TRONCAMENTO “.................................................47
3.1.5 ARTEFATTO “SPIKE”...................................................................49
3.1.6 ARTEFATTO “ZIPPER”.................................................................51
CAPITOLO 4................................................................................52
4.1 SUSCETTIVITA’ MAGNETICA..............................................52
4
4.1.1 MATERIALI DIAMAGNETICI, PARAMAGNETICI E FERROMAGNETICI...............54
4.1.1 A) DIAMAGNETISMO ...................................................................55
4.1.1 B) PARAMAGNETISMO ................................................................57
4.1.1 C) FERROMAGNETISMO...............................................................59
4.1.2 ARTEFATTO METALLICO PRODOTTO NELL’IMAGING DI RISONANZA MAGNETICA
......................................................................................................63
4.1.2 IMPIANTI METALLICI...................................................................63
4.1.2 ARTEFATTI NELL’IMMAGINE DI RISONANZA MAGNETICA........................64
CAPITOLO 5................................................................................67
5.1 PARTE SPERIMENTALE......................................................67
5.1.1INTRODUZIONE...........................................................................67
5.1.2 CRITERI DI COMPATIBILITÀ DEI MEZZI DI SINTESI METALLICI CON LA
RISONANZA MAGNETICA ........................................................................68
5.1.3 RISULTATI E CONCLUSIONI ..........................................................70
BIBLIOGRAFIA............................................................................80
5
INTRODUZIONE
Con l’introduzione della Risonanza magnetica nella pratica
clinica si è posto fin dall’inizio il problema degli studi effettuati su
pazienti portatori di mezzi di sintesi metallici, infatti questi elementi
studiati con tecniche tradizionali determinano la produzione di
un‘area di “vuoto” di segnale nella loro sede creando inoltre la
distorsione del segnale nelle aree adiacenti rendendo così le
immagini poco diagnostiche.
Attualmente i soggetti portatori di mezzi di sintesi metallici
vengono studiati con tecniche tradizionali come la radiografia
convenzionale, artografia, scintigrafia ossea ma queste tecniche
hanno bassa specificità.
Una prima soluzione è stata quella di introdurre materiali
compatibili con la risonanza magnetica, come il titanio una lega
che riduce gli effetti di distorsione sul campo magnetico, la
seconda di riuscire ad ottimizzare le tecniche di risonanza
magnetica tentando di ridurre l’artefatto da suscettibilità magnetica
generato mezzi di sintesi metallici. Lo scopo di questo lavoro è
stato ottimizzare le sequenze utilizzate convenzionalmente al fine
di studiare soggetti portatori di mezzi di sintesi metallici rendendo
le immagini clinicamente diagnostiche.
6
CAPITOLO 1
1.1 RISONANZA MAGNETICA NUCLEARE
La risonanza magnetica nucleare è una tecnica usata per
ottenere
immagini
accurate
del
corpo
umano.
Si
basa
sull’interazione tra i nuclei atomici e i campi magnetici esterni.
Questa
proprietà
fu
scoperta,
contemporaneamente
ed
indipendentemente, da Felix Bloch e Edward Mills Purcell nel 1946,
e valse loro il premio nobel per la fisica nel 1952.
Il successo della risonanza magnetica nucleare è dovuto a tre
fattori principali:l’acquisizione di immagini di sezioni (secondo piani
con
orientamento
qualsiasi)
e
di
volumi;
l’osservazione
di
grandezze fisiche caratteristiche della struttura tessutale con
notevole capacità di discriminare i tessuti molli; l’uso di radiazioni
elettromagnetiche non ionizzanti.
7
1.1.2 PRINCIPI FISICI
Neutroni e protoni, dotati di spin 1/2, formano in molti casi
nuclei atomici con spin diverso da zero ed a tale spin è associato un
momento magnetico. L’applicazione di un intenso campo magnetico
tende
ad
allineare
il
momento
magnetico
lungo
direzioni
preferenziali; a differenti orientazioni del momento magnetico
corrispondono differenti stati energetici. Come espresso dalla
formula di Larmor, la differenza tra i vari livelli energetici è
proporzionale al momento magnetico ed alla intensità del campo
magnetico applicato. Irraggiando un sistema di nuclei con un’onda
elettromagnetica di frequenza pari alla frequenza di Larmor è
possibile fornire energia al sistema nucleare: tale effetto è noto
come risonanza magnetica nucleare (NMR).
In questo paragrafo verranno descritti i principi fisici alla base
del fenomeno della risonanza magnetica nucleare. Si illustrerà,
qualitativamente, come la tecnica NMR consenta di ottenere
informazioni utili su di un sistema di nuclei dotati di momento
magnetico: in particolare saranno presi in esame nuclei con spin
1/2
come
l’idrogeno.
Quest’ultimo,
dato
l’elevato
fattore
8
giromagnetico e la grande abbondanza all’interno delle strutture
biologiche, riveste un ruolo primario per studi in ambito biofisico.
Figura 1 :Modello semplificato del protone
1.1.3 Spin e momento magnetico nucleare
Lo spin è un fenomeno quanto-meccanico che giustifica
l’interazione di un nucleo con un campo magnetico. Lo spin viene
indicato con I, detto anche numero quantico di spin. Tale
parametro può assumere soltanto valori interi o semi-interi,
9
dipendenti dal numero di protoni e neutroni presenti nel nucleo; se
I = 0 il nucleo non avrà interazioni con un campo magnetico. Noi ci
interesseremo del nucleo dell’atomo di idrogeno, che ha un solo
protone ed ha I = 1/2.
Ad ogni nucleo è associato un momento angolare p dato da:
p=
h
•I
2π
dove h = 6,63 x J x sec è la costante di Planck. 3410−
Poiché il nucleo ha una carica elettrica ad esso è associato un
momento magnetico di dipolo μ dato da:
μ =γ • p
con γ che viene detto fattore (o rapporto) giromagnetico.
Nucleo
Spin
1H (idrogeno)
1/2
Rapporto
giromagnetico
γ/2π (mH/T)
42.577
23Na (sodio)
3/2
11.268
31P (fosforo)
1/2
17.254
19F (fluoro)
1/2
40.077
10
La seguente tabella (1.1) riporta le proprietà magnetiche di
alcuni nuclei
1.1.4 Interazione dei nuclei con un campo magnetico
statico
La presenza di un momento di dipolo magnetico fa sì che i
nuclei con spin diverso da zero si comportino in un campo
magnetico come una barretta magnetica avente due poli (nord e
sud), assumendo quindi opportuni orientamenti.
Secondo il modello quantico il numero di tali orientamenti è
pari a (2I+1), i quali corrispondono ai diversi livelli energetici
permessi: per nuclei con I=1/2 si hanno due possibili stati
energetici del protone, corrispondenti a misure della proiezione di μ
11
lungo Bo ad
orientamento parallelo “up” al campo applicato Bo
(stato a bassa energia) e l’altro ad orientamento antiparallelo
”down” al campo applicato Bo (stato ad alta energia). La differenza
di energia tra due livelli adiacenti é data da:
ΔE =
μ • Bo
h
=γ
• Bo
I
2π
Facendo ricorso alla legge di Planck si nota che transizioni da
un livello di energia ad uno adiacente possono essere indotte
applicando
radiazioni
aventi
ω L = γ • Bo . Tale frequenza
frequenza
ωL/2π
,
dove
viene detta “frequenza di Larmor”
ed il fenomeno viene detto risonanza magnetica nucleare (NMR);
nel campo biofisico, dove si utilizzano campi magnetici dell’ordine
dei Tesla, la frequenza di Larmor assume valori nel range delle
radiofrequenze.
12
Figura 2 :Moto di precessione di M intorno alla direzione del campo B0 a frequenza
di Larmor ω.
In figura 2 è rappresentato l’equivalente classico del modello
quantistico discusso poco sopra, dove la frequenza di Larmor
rappresenta la velocità di rotazione del momento magnetico del
protone nel suo moto di precessione intorno B0.
Da ora in poi considereremo soltanto nuclei con I=1/2, in
ragione dell’elevato valore del fattore giromagnetico (tab. 1.1):
fattori giromagnetici maggiori permettono di avere la stessa
separazione fra livelli energetici utilizzando campi magnetici statici
inferiori. L’intensità del campo magnetico esterno e l’energia
termica determinano se il nucleo si allineerà nel verso parallelo
(condizione di minima energia) o antiparallelo (condizione di
massima energia) al campo.
13
Figura 3 :Orientamento dei nuclei: a sinistra in assenza di campo magnetico; a
destra il campo magnetico B0 induce una magnetizzazione netta M
A parità di B0, materiali con differenti valori di γ rispondono
con diverso “gap” energetico fra gli stati protonici “up” e “down”.
Per esempio, usando i valori della precedente tabella si calcola
che la frequenza di Larmor dell’idrogeno con un campo magnetico
di 1.5 T è 63,85MHz. Per osservare fenomeni di risonanza, deve
essere applicata ai nuclei un’onda elettromagnetica propagatesi
nella direzione del campo esterno B0, polarizzata circolarmente nel
piano perpendicolare alla direzione di B0, e variabile alla frequenza
di Larmor. In queste condizioni l’atomo acquista energia e risuona.
Si parla di condizione di risonanza magnetica del nucleo. Il campo
magnetico che la provoca si chiama campo di eccitazione o campo a
14
radio frequenza, essendo la frequenza di Larmor dell’idrogeno entro
la banda delle radio frequenze per tutti i valori significativi di B0
(0,1 - 4 T). In conclusione per ottenere la condizione di risonanza
dei protoni si deve applicare un campo magnetico totale dato dalla
somma dei valori di del campo Bo e B1.
Per descrivere il moto della magnetizzazione in presenza del
campo rotante è utile scegliere un sistema di riferimento che ruoti
intorno a B0 nella stessa direzione in cui precedono gli spin con
frequenza pari a quella di oscillazione del campo
B1. In tale
riferimento, nella condizione di risonanza, i nuclei sono sottoposti
ad un campo efficace.
Dove x', y', z' sono i versori degli assi del sistema rotante. Si
ricava che la magnetizzazione precede intorno all’asse x'
con
velocità γB1.
Quindi, dopo un tempo t, M0 ha ruotato intorno a x' di un
angolo α dato da
α = γ • B1• t
L’angolo a si chiama angolo di flip (flip angle) ed è un
parametro essenziale dei metodi delle sequenze di eccitazione usate
in NMR.
15
1.1.5 Eccitazione a impulsi o Radio frequenza (RF)
Nella tecnica di eccitazione a impulsi la risonanza viene indotta
attivando il campo a radio frequenza per un tempo tw definito dalla
seguente relazione:
α = γ • B1• t w
Sotto
l’effetto
del
campo
di
eccitazione
il
vettore
magnetizzazione viene perturbato dalla sua posizione di equilibrio
cosicché diventano non nulle le sue componenti nel piano xy
(componenti trasverse).
.
16
Figura 4: Angolo di flip α
In particolare la magnetizzazione può trovarsi ai seguenti
angoli:
α=π/2, la magnetizzazione giace nel piano xy (impulso a 90°).
α=π, la magnetizzazione è diretta lungo –z (impulso a 180°).
1.1.6 Ricezione del segnale
Una volta cessata l’eccitazione il vettore magnetizzazione
tende a riportarsi nella sua posizione di equilibrio (decadimento)
inducendo, in una bobina ricevente posta nel piano xy, un segnale
alla frequenza di Larmor detto segnale di decadimento libero FID
(free induction decay). Il decadimento avviene secondo due
costanti di tempo caratteristiche: T1 e T2 .T1 è la costante di tempo
secondo cui la componente longitudinale di M torna alla posizione di
equilibrio e si definisce tempo di rilassamento longitudinale o spinreticolo. T2 invece caratterizza il decadimento delle componenti
17
trasversali: immediatamente dopo l’impulso a radio frequenza tutti
gli
spin
precedono
in
fase;
venendo
meno
l’eccitazione
gradualmente essi perdono la coerenza di fase cosicché il loro
effetto tende a zero in maniera esponenziale. T2 si definisce anche
tempo di rilassamento magnetico trasversale o spin-spin. Eventuali
disomogeneità di campo magnetico comportano un maggiore
defasamento con un’ulteriore riduzione del tempo di rilassamento
trasversale. Si definisce quindi un tempo di rilassamento efficace
T2* che tiene conto di tale effetto. Risulta sempre T2* < T2 < T1 e
generalmente T2 << T1.
18
19
20
Figura 5 :Tempo di rilassamento per la materia grigia a 1,5 T: a sinistra T1 (950 ms),
a destra T2 (100 ms)
Figura 6 :Andamento del FID.
Dato che il segnale rilevabile dal ricevitore è di debole
intensità, per migliorare il rapporto segnale-rumore si ricorre alla
tecnica di “averaging”: Il segnale FID viene ottenuto più volte
ripetendo con un certo intervallo di tempo l’impulso di eccitazione.
L’intervallo di ripetizione TR è una variabile molto importante
nel processo di formazione dell’immagine: tempi troppo brevi non
permettono a tutti i nuclei, eccitati dall’impulso a radio frequenza,
di tornare all’equilibrio; d’altra parte maggiore è TR e maggiore è la
durata dell’esame. Nella seguente tabella sono riportati i valori della
21
densità degli spin dell'idrogeno, del T1 e del T2 per i comuni tessuti
che compongono il corpo:
Tessuto
T1(s)
T2(ms)
ρ
CFS
0.8-20
110-2000
70-230
Bianca
0.76-1.08
61-100
70-90
Grigia
1.09-2.15
61-109
85-125
Muscolo
0.95-1.82
20-67
45-90
Grasso
0.2-0.75
53-94
50-100
1.1.7 Codifica spaziale
Oltre al campo magnetico statico e all’impulso a radio
frequenza, vengono applicati dei campi lentamente variabili: i
cosiddetti gradienti di localizzazione spaziale. Essi vengono prodotti
tramite bobine supplementari dette bobine dei gradienti e hanno
intensità non superiore a una piccola frazione del campo statico Bo.
22
Usualmente le tre direzioni dello spazio vengono definite in
modo da avere l’asse z coincidente con l’asse del magnete (e quindi
del paziente), l’asse x in direzione orizzontale, l’asse y in direzione
verticale.
Tra
i
vari
metodi
di
ricostruzione
dell’immagine
riportiamo, come esempio, la procedura di acquisizione planare
mediante trasformata di Fourier. Il gradiente nella direzione z è
usato tipicamente per la selezione del piano (slice). Viene applicato
un gradiente di campo magnetico lineare cosicché l’intensità del
campo magnetico e, conseguentemente, la frequenza di Larmor
aumenti lungo la direzione z. In pratica, tutti i protoni del piano a
quota z hanno frequenza di Larmor. Lo spessore Δz della sezione
dipende dall’intensità del gradiente e dallo spettro di frequenza
dell’impulso RF cosicché a questo punto, gli spin di una stessa slice,
ribaltati nel piano xy tramite l’impulso a radiofrequenza e il
procedimento di selezione del piano, precedono tutti in fase e alla
stessa frequenza di risonanza intorno al campo magnetico statico.
Se adesso si applicano i gradienti Gx e Gy rispettivamente per
gli intervalli di tempo tx e ty, il vettore di magnetizzazione M
effettua moti di precessione con pulsazioni dove il primo gradiente
Gx, introduce una codifica di fase: la fase, al termine dell’intervallo
23
tx, dipende dalla posizione dei nuclei lungo la direzione x, Gy
effettua la codifica di frequenza: al termine dell’intervallo ty gli spin
precedono
con
diversa
frequenza
di
risonanza
e
risultano
ulteriormente sfasati lungo l’asse x. Il gradiente Gy viene applicato
durante la fase di registrazione del segnale infatti è anche detto
gradiente di lettura.
Figura 7 : Applicazione del gradiente Gz e piano eccitato.
24
Figura 8 :Codifica spaziale 2D. Fase e frequenza degli spin dipendono dalla
localizzazione spaziale.
Usando tutti e tre i gradienti si può ottenere la codifica spaziale
tridimensionale. Il segnale registrato è funzione del tempo, della
codifica di fase e della codifica di frequenza:
S = S (t, Gx , Gy, T pe )
Dove
T pe
è il tempo di applicazione del gradiente Gy .
Introducendo le seguenti grandezze:
k x = γ • G x •t
k y = γ • G y •T pe
Tramite un cambiamento di coordinate si può descrivere il
segnale secondo il formalismo del k-space, che consiste nella
rappresentazione dei dati registrati nello spazio delle coppie (kx,
ky):
25
S = S (k x ,k y )
Per passare dal k-space all’immagine si opera la trasformata di
Fourier bidimensionale di ciascuna slice. I volumi si ricostruiscono a
partire dalle slice.
Figura 9 :Conversione tra K-space e spazio dell’immagine.
1.1.8 Struttura della risonanza
26
Figura 10 : Rappresentazione schematica dell’hardware della risonanza.
Nella parte superiore dello schema si trovano i componenti
dell'apparecchiatura
localizzati
nella
stanza
del
tomografo.
Il
magnete produce il campo magnetico B0. All’interno del magnete ci
sono le bobine dei gradienti che producono i gradienti di B0 nelle
direzioni x, y e z. Dentro le bobine dei gradienti c'è la bobina di RF,
che produce il campo magnetico B1. La bobina di RF inoltre
acquisisce il segnale proveniente dagli spin presenti all'interno del
corpo. Il paziente viene posizionato dentro al magnete su di un
lettino controllato da un computer. La stanza dove ha luogo la
27
scansione e' circondata da uno schermo per RF il quale impedisce
che gli impulsi RF di alta potenza possano irradiare le zone
circostanti e che i vari segnali RF provenienti da stazioni televisive e
postazioni
radio
siano
captati
dall'apparecchio.
Il
controllo
dell'apparecchiatura di RM e di tutti i suoi componenti è effettuato
con un computer. I componenti della sezione RF (rappresentati
nella figura in verde) sono la sorgente RF e il programmatore di
impulsi. La sorgente produce un'onda sinusoidale della frequenza
desiderata. Il programmatore di impulsi genera impulsi a RF.
l'amplificatore RF ne aumenta la potenza dai mW ai kW.
La sezione dedicata alla formazione dei gradienti di codifica
spaziale è rappresentata nella figura in arancione. Essa comprende
il programmatore degli impulsi di gradiente che stabilisce la forma e
l'ampiezza di ciascuno dei tre gradienti di campo, e l'amplificatore
dei gradienti che ne aumenta la potenza a un livello sufficiente per
"pilotare" le relative bobine. L'operatore seleziona e personalizza la
sequenza di imaging attraverso una consolle. Egli può vedere le
immagini su un video facente parte della consolle o in alternativa
stamparne una copia su pellicola.
28
CAPITOLO 2
2.1 LE SEQUENZE
Le
immagini
di
Risonanza
magnetica,
dipendono
principalmente dall’intensità del campo magnetico applicato, dai
parametri intrinseci del tessuto (tempo di rilassamento T1-T2 e
Densità Protonica) e da parametri estrinseci operatore dipendente.
Le sequenze si basano sull’invio di impulsi di radiofrequenza e
su variazioni dei gradienti magnetici locali, applicati in presenza del
campo magnetico principale. Le diverse modalità di generazione
dell’echo contraddistingue i tipi di sequenze impiegate in RM.
Le
principali
sequenze
usate
per
produrre
immagini
di
risonanza magnetica sono: la spin echo (SE), la gradient recalled
echo (GRE), la echo planar imaging (EPI), la turbo spin echo (TSE)
e le Half-Fourier Aqisition single shot turbo spin echo (HASTE) .
29
2.1.1 La sequenza spin echo (SE)
Come noto, gli spin cominciano a perdere la coerenza di fase
dopo l’applicazione dell’impulso a 90°. Grazie a questa proprietà, è
possibile registrare un segnale chiamato eco. Nella sequenza spin
echo, vengono prima di tutto applicati il gradiente in direzione z e
l’impulso di eccitazione a RF tale da indurre un ribaltamento di 90°
degli assi di precessione. Al termine di questo impulso ha inizio il
processo di rilassamento che dà luogo al segnale FID.
Figura 11 : diagramma temporale della sequenza SE
Questo, tuttavia, non viene raccolto: si preferisce piuttosto,
per considerazioni legate alla struttura del ricevitore, applicare,
30
dopo un certo tempo, un impulso di eccitazione a 180° che ha
l’effetto di rifasare il moto di precessione dei nuclei producendo un
eco che costituisce il reale segnale acquisito.
Le sequenze spin echo vengono usate per ricavare immagini di
T1, T2 e di densità di protonica.
Per l’acquisizione dei dati e la successiva ricostruzione di
un’immagine RM
sono necessarie tante successive sequenze
d’impulsi a 90° e 180° quante sono le linee della matrice.
Nello sviluppo della sequenza SE, le variabili di maggior
interesse sono : il tempo di ripetizione (TR) cioè l’intervallo di
tempo tra l’inizio di una sequenza e l’inizio della successiva e il
tempo di echo (TE), cioè l’intervallo di tempo tra l’invio dell’impulso
a 90° e la comparsa dell’echo. La semiotica del segnale dipende dal
TR e dal TE.
Dal TR dipende anche il tempo di acquisizione della sequenza e
quindi la durata dell’esame. In una sequenza SE, il tempo di
acquisizione è infatti regolato dall’equazione :
Ta = TR x NEX x NPCF
Ta : tempo di acquisizione
31
TR: tempo di ripetizione
NEX : numero delle eccitazioni o misure
NPCF : il numero di passi della codifica di fase ( cioè il numero di
linee della matrice lungo l’asse della codifica di fase).
Sono
caratterizzate
da
buona
qualità
dell’immagine
e
consentono di ottenere dettagliate ricostruzioni anatomiche.
2.1.2 La sequenza gradient recalled echo (GRE)
Nella sequenza GRE, l’impulso di eccitazione RF produce un
angolo di flip, α, tipicamente compreso tra 0° e 90°.
Figura 12 : diagramma temporale della sequenza GRE
32
L’eco è formata attivando un gradiente di polarità opposta (eco
di gradiente), e quindi l’impulso a 180° presente nella sequenza
spin echo non è necessario.
Un angolo di flip piccolo permette che il decadimento
longitudinale della magnetizzazione sia rapido, quindi un nuovo
impulso a radiofrequenza può essere applicato dopo poco tempo
rendendo le sequenze GRE più veloci delle SE. Le sequenze gradient
recalled echo possono essere usate per ottenere immagini relative
ai tempi di decadimento T1 e T2* e alla densità protonica. A causa
dell’assenza dell’impulso a 180°, i protoni sono soggetti a maggiori
disomogeneità del campo magnetico e quindi vanno velocemente
fuori fase, per cui l’intensità del segnale decade più rapidamente.
Le
sequenze
GE
sono
pertanto
particolarmente
sensibili
all’inomogeneità del campo magnetico statico.
Il vantaggio della sequenza GE è la possibilità di acquisizioni
rapide infatti vengono particolarmente utilizzate per studi dinamici,
mentre il grande svantaggio è l’elevata presenza
di artefatti da
suscettibilità magnetica dovuti se presenti da protesi metalliche,
che la rendono meno idonea e la meno utilizzata per l’esecuzione di
esami in presenza di tali presidi.
33
2.1.3 La sequenza Echo Planar Imaging (EPI)
L’echo planare è una sequenza di imaging di risonanza
magnetica molto veloce: si possono ottenere immagini in tempi
inferiori a 100 ms pur mantenendo contrasti simili alle sequenze
spin echo e gradient recalled echo. Le sequenze convenzionali di
imaging, infatti, registrano una linea del k-space ad ogni passo
della codifica di fase. Poiché si ha un passo della codifica di fase
ogni TR secondi, il tempo richiesto per la produzione dell'immagine
è dato dal prodotto di TR per il numero di passi della codifica di
fase. L'imaging echo planare, invece, registra tutte le linee dello
spazio-k in un singolo TR.
L’impulso RF a 90° viene applicato insieme ad un gradiente di
selezione della slice Gs. Successivamente vengono applicati un
impulso di gradiente di codifica di fase iniziale Gφ e un impulso di
gradiente di codifica di frequenza iniziale Gf per posizionare gli spin
nell'angolo dello spazio-k. Segue un impulso a 180° . Dopodichè le
direzioni della codifica di fase e di frequenza sono alternate così da
scandire rapidamente l'intero k-space.
34
Figura 13 : diagramma temporale della sequenza Epi
Lo sviluppo dell'imaging echo planare ha permesso di produrre
immagini di risonanza magnetica in tempo reale. La sua più grande
applicazione è la risonanza magnetica funzionale del cervello.
L'imaging funzionale è quello che collega funzioni del corpo o
pensieri a specifiche zone del cervello.
2.1.4 La sequenza Turbo Spin-Echo (TSE)
Questo tipo di sequenza contiene molti impulsi di eccitazione,
ognuno dei quali è seguito da un treno d’impulsi di rifocalizzazione
35
che, a sua volta genera un treno di echi di spin. Le sequenze TSE
hanno un impulso a 90° seguito da un treno d’impulsi di
rifocalizzazione a 180°.
Queste immagini possono avere una alta risoluzione spaziale e
un alto rapporto segnale rumore. Con la tecnica TSE, la maggior
parte del tempo viene impiegata per applicare gli impulsi di
rifocalizzazione e per campionare gli echi. Infatti durante un certo
TE, vengono registrati più echi, questo aumenta l’efficienza di un
fattore pari al numero di echi che possono essere ottenuti prima
che sia raggiunto il TE effettivo.
Due
fattori maggiormente determinanti per l’efficienza delle
tecniche TSE è Echo Spacing (ES) cioè il tempo tra gli echi e l’Echo
Train Lenght (ETL) cioè il numero di echi generati nello stesso TR
per mezzo dell’impulso a 180 ° successivi al primo a 90°,
questi
echi sono codificati da un diverso gradiente di codifica di fase e
sono responsabili della contemporanea trascrizione di più linee del
K spazio.
Per una data durata di treno di echi, se gli echi vengono
ottenuti più rapidamente, si può aumentare la lunghezza del treno
36
di echi, riducendo, così, il numero di eccitazioni che devono essere
ripetute.
La maggior parte delle sequenze TSE sono implementate i
modo tale che l’echo spacing sia minimizzato , anche se le
variazioni
della larghezza di banda influenzano la durata del
campionamento dell’echo e, quindi hanno un effetto determinante
sull’echo spacing. All’aumentare della larghezza di banda, l’echo
spacing si riduce. Per questa ragione, la banda di campionamento
deve essere la più larga possibile nelle tecniche TSE a meno di
limitazione dell’hardware del sistema.
2.1.5 La sequenza Half-Fourier Aqisition single shot turbo
spin echo (HASTE)
Generalmente, la qualità delle immagini TSE è migliore se il
treno di echi non è più lungo del necessario per riempire il TE ef, in
quanto treni di echi più lunghi tendono ad aumentare gli artefatti.
D’altra parte, si ottengono dei benefici quando tutti gli echi vengono
ottenuti con un solo treno.
37
Le tecniche Single Shot possono essere utilizzate se il tempo di
acquisizione è ridotto al minimo. Si usano diverse strategie
contemporaneamente. Il campionamento dei dati dovrebbe essere il
più veloce possibile, e può essere ottenuto con una banda di
ricezione ampia e una commutazione rapida dei gradienti.
Le misure per diminuire la quantità di dati necessari
per la
ricostruzione dell’immagine riducono ulteriormente la durata del
treno di echi. Queste misure includono il campionamento parziale di
ogni eco e la ricostruzione di Fourier parziale, che, applicate
contemporaneamente comportano l’acquisizione di poco più del
25% del K-space mentre il resto viene interpolato. La Singole Shot
TSE ha un TR infinito, in quanto l’impulso di eccitazione non viene
ripetuto. Questo rimuove la pesatura in T1. Gli artefatti da
movimento sono molto meno pesanti nelle immagini Single Shot,
che spesso possono essere acquisite in meno di mezzo secondo.
Benefici ulteriori includono l’assenza di transizioni brusche nel
riempimento del K-space, e, di conseguenza, l’artefatti sui contorni
e dei Ghost. I limiti maggiori di questa sequenza è il basso rapporto
segnale/rumore.
38
CAPITOLO 3
3.1 ARTEFATTI
Una grande varietà di artefatti
possono essere prodotti
nell’imaging di Risonanza Magnetica. In questo capitolo vengono
descritti i più comuni artefatti come l’artefatto : Chemical-Shift,
Warp Around o da Ribaltamento, da Movimento, da Troncamento,
Spike e Zipper . L’eliminazione di alcuni di questi artefatti può
essere eseguita solamente dal personale ingegneristico ma il
tecnico di radiologia e il medico radiologo hanno la responsabilità di
riconoscerli.
In seguito verrà mostrato l’aspetto e la descrizione di questo
tipo di artefatti, illustrando le basi fisiche e il modo per ridurli.
Un artefatto in un immagine è una qualsiasi caratteristica che
appare
nell’immagine
e che non
è presente
nella struttura
anatomica esaminata.
Talvolta è il risultato di una distorsione o assenza del segnale
con
conseguente
Possono
somma
presentarsi
o
anche
cancellazione
per
un
dell’
mal
‘informazione.
funzionamento
39
dell’apparecchiatura
o
una
scelta
tecnica
inappropriata.
E'
importante familiarizzare con la comparsa di artefatti poiche' questi
possono
nascondere
o
compromettere
l'accertamento
di
una
patologia. Di conseguenza gli artefatti in un'immagine possono
produrre falsi negativi e falsi positivi.
3.1.1 Artefatto “ Chemical Shift”
Un artefatto da chemical shift e' dovuto alla differenza
nella composizione chimica (frequenza di Larmor) di grasso e
acqua. L'artefatto si manifesta in un'immagine come un'alterata
registrazione dei pixel contenenti grasso da quelli contenenti acqua.
La differenza di chemical shift tra acqua e tessuto adiposo o
assimilabile a grasso e' approssimativamente di 3.5 ppm che, a 1.5
Tesla, corrisponde a una differenza di frequenza tra acqua e grasso
di circa 220 Hz. Nella direzione della codifica di frequenza, la
frequenza del segnale è usata per definire la localizzazione spaziale.
L’effetto di questa variazione nella direzione della codifica di
frequenza provoca nell’immagine un bordo nero tra l’interfaccia
grasso-acqua e un bordo brillante nell’interfaccia opposta.
40
Questo tipo di artefatto è definito come chemical shift di primo
genere. Nelle sequenze convenzionale GRE o SE non ci sono effetti
da chemical shift nella direzione della codifica di frequenza mentre
nelle sequenza EPI l’effetto di questo artefatto si produce nella
direzione della codifica di fase. Durante il gradiente di codifica di
fase, gli spin del grasso e dell'acqua acquistano fase a differenti
velocità. L'effetto ottenuto e' che gli spin del grasso e dell'acqua
nello stesso voxel sono codificati come se fossero localizzati in voxel
differenti.
Un aspetto diverso di questo artefatto e l’artefatto di secondo
livello e si può notare in immagini GRE , questo effetto si basa sulla
differenza di
frequenza di precessione tra i protoni dell’acqua e
quelli del grasso e si verifica quando le magnetizzazioni di chemical
shift diversi sono fuori fase le une rispetto alle altre. Fasi opposte di
magnetizzazioni di protoni dell’acqua e del grasso
riducono, per
esempio, l’intensità di segnale, poiché il risultato è la cancellazione
del segnale invece che la somma dei segnali. Questo tipo di
artefatto viene eliminato utilizzando sequenze standard come le SE
o le TSE, nelle quali gli impulsi di rifocalizzazione correggono le
differenze di chemical shift. Nelle sequenze GRE, invece questo
41
artefatto viene eliminato scegliendo un TE in modo tale che le
magnetizzazioni dei protoni del grasso e dell’acqua siano in fase.
L’entità di entrambi i tipi di artefatto può essere ridotta al minimo
sopprimendo
il
segnale
del
grasso,
impiegando
tecniche
di
soppressione del chemical shift del grasso o di annullamento
utilizzando sequenze IR.
(a)
(b)
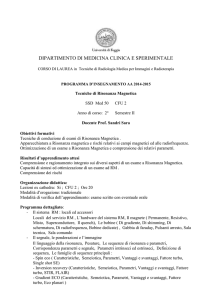
Figura 14 : Artefatto da chemical shift. a) l’immagine mostra un grave artefatto
dovuto ad una insufficiente soppressione del grasso;
b) immagine con saturazione del grasso, mostra una diminuzione dell’artefatto.
42
3.1.2 Artefatto “Warp Around”, da ribaltamento
La risoluzione spaziale di un’ immagine può essere migliorata
riducendo il suo campo di vista (FOV). Il FOV è spesso più piccolo
della parte del corpo che viene acquisita. Queste situazioni possono
portare ad artefatti da ribaltamento, nei quali i dati dell’immagine al
di fuori del FOV vengono ribaltati e rappresentati sul lato opposto
dell’immagine. Gli artefatti da ribaltamento posso verificarsi su
entrambi gli assi di una sezione d’immagine e sull’asse di codifica
della sezione di un’ acquisizione tridimensionale.
Sull’asse di codifica di frequenza, i dati dell’immagine vengono
rappresentati secondo la frequenza dei segnale RM ricevuti. Il range
delle frequenze campionate è definito dalla larghezza della banda di
campionamento, che è sinonimo di velocità di campionamento. Con
le moderne attrezzature l’artefatti da ribaltamento sull’asse di
frequenza vengono evitati utilizzando filtri digitali che eliminano i
segnali con frequenze al di fuori del range desiderato.
Sull’asse di codifica di fase questi artefatti sono più difficili da
prevenire.
43
Un artefatto da ribaltamento può produrre sulle immagini
Gradient Echo eseguito su parti del corpo ampie un artefatto
particolare “zebrato”.
Figura 15 : Artefatto da ribaltamento. immagine della testa, come si vede il naso si
estende oltre il limite sinistro del campo di vista e la sua immagine e' stata ribaltata
comparendo nel lato destro dell'immagine.
La disomogeneità di campo magnetico al di fuori del FOV
producono artefatti che si sovrappongono all’immagine primaria. Le
strisce sono causate dalla conseguente interferenza di fase. Il solo
44
modo per evitare una misurazione di fase ambigua è quello di
utilizzare sull’asse di codifica di fase un FOV abbastanza grande.
3.1.3 Artefatto da “ Movimento “
Come dice il nome, gli artefatti da movimento sono dovuti al
movimento dell'oggetto esaminato o di una sua parte durante la
sequenza di imaging. Il movimento di tutto l'oggetto durante la
sequenza
di
imaging
generalmente
dell'intera
immagine ad opera
di
comporta
"immagini
l'offuscamento
fantasma" nella
direzione di codifica di fase.
Gli errori di codifica di fase dovuti a movimento si manifestano
come artefatti lungo l’asse di codifica di fase, a prescindere dalla
direzione del movimento.
Questo
artefatto
(normalmente
in
si
manifesta
aumento)
come
dell’intensità
del
un’alterazione
segnale,
spesso
accompagnato da una riduzione di intensità del segnale relativo alla
struttura in movimento. Si consideri, ad esempio, un’immagine
addominale che contenga la cistifellea con un segnale ad alta
intensità che si sta muovendo durante la respirazione. L’effetto è
come
se
l’intensità
del
segnale
di
questa
cistifellea
fosse
45
rappresentata erroneamente in varie posizioni lungo l’asse di
codifica di fase.
Se il movimento fosse completamente casuale, la posizione di
questa rappresentazione scorretta del segnale varierebbe in modo
casuale. Gli artefatti, in questo caso, sarebbero “spalmati” lungo
l’asse di codifica di fase. Spesso, invece, il movimento è ripetitivo e
periodico, come per il movimento da respirazione o di attività
cardiaca. L’artefatto da movimento periodico è più coerente e si
trova ad intervalli regolari lungo l’asse di codifica di fase.
La
forma
di
questi
artefatti
spaziati
in
modo
regolare
assomiglia in genere a quella struttura in movimento. Gli artefatti
che
si
creano
da
movimenti
periodici
durante
l’acquisizione
dell’immagine vengono quindi spesso chiamati “ghost” fantasma.
La distanza tra i ghost dipende dall’intervallo di tempo tra i
movimenti ripetitivi e la forma delle variazioni del gradiente di
codifica di fase. La distanza tra i ghost aumenta all’aumentare
dell’intervallo tra i movimenti e all’aumentare del tempo di
ripetizione o alla riduzione della frequenza cardiaca.
46
(a)
(b)
Figura 16 :artefatto da movimento: a)immagine addominale ottenuta senza apnea
respiratoria; b) immagine addominale in apnea respiratoria con lieve artefatto da
movimento dovuto al battito cardiaco
Quando il tempo di ripetizione è sufficientemente corto da far
sì che un movimento non si ripeta, il ghost non si propaga lungo
l’intero asse di codifica di fase. Piuttosto, il ghost sulle immagini
rapide
come
queste
possono
manifestarsi
come
blurring
(offuscamento) dei contorni.
3.1.4 Artefatto da “ Troncamento “
I segnali di Risonanza Magnetica sono delle onde. Sono
mappati spazialmente secondo quella che la loro frequenza e la loro
47
fase. Nel tentativo di creare una da una serie complessa di segnali
analogici un’immagine con un numero finito di pixel, i dati vengono
troncati.
Questo
fatto
produce
degli
artefatti.
L’immagine
è
un’approssimazione della regione d’interesse, dal momento che la
risoluzione spaziale è limitata dalle dimensioni dei voxel.
L’analisi di Fourier comporta la rappresentazione della struttura
all’interno di un’immagine come una complessa combinazione di
onde. Le variazioni rapide d’intensità di segnale, all’interfaccia tra
strutture ad alta e bassa intensità si segnale, possono produrre un
artefatto ad anello (ring-down), che consiste in bande chiare e
scure alternate, la cui intensità si riduce in rapporto alla distanza
dall’interfaccia ad alto contrasto.
L’entità degli artefatti da troncamento può essere ridotta
aumentando la risoluzione spaziale dell’immagine o riducendo il
contrasto dell’interfaccia.
48
a)
b)
Figura 17 : artefatto da troncamento. Sequenza SE T1. nell’immagine a) la matrice
utilizzata è 64x64-b) la matrice utilizzata è 256x256. come si può notare l’artefatto
viene eliminato aumentando la matrice d’ acquisizione.
3.1.5 Artefatto “Spike”
I gradienti applicati nelle sequenze EPI possono produrre dei
punti di errata acquisizione oppure possono formare una punta di
rumore nel K-space.
I dati errati possono essere uno o più punti nel K- space, che
hanno un’intensità troppo bassa o troppo alta rispetto all’intensità
del restante K-space. La convoluzione di questo Spike, con tutte le
altre informazioni dell’immagine derivanti dalla trasformata di
49
Fourier, si presenta come
bande scure che giacciono sopra
l’immagine.
Il dislocamento dello spike di rumore risultante al centro del Kspace determina lo spazio tra le bande e l’angolazione delle bande
viene determinato dalla direzione della codifica.
L’artefatto da Spike di solito risulta transitorio ma se dovesse
persistere è lecito informare il personale ingegneristico.
Questo artefatto avviene molto spesso in casi in cui la
connessione elettrica viene danneggiata e produce archi o per
rottura di un interconnessione di una banda rendendo questo
artefatto più evidente.
(a)
(b)
Figura 18 : artefatto Spike. Nell’immagine b,il punto presente nel k- space,risulta
formare nell’immagine a, il tipico artefatto a bande
50
3.1.6 Artefatto “Zipper”
Questo tipo di artefatto è comune alla strumentazione, è
causato da una interferenza nella stanza del magnete.
L ‘immagine si presenta come una regione di incremento di
rumore con una finestra di uno o due pixel che si estende nella
direzione della codifica di frequenza fino o al di fuori dell’immagine.
Tutte le stanza del magnete sono schermate per eliminare le
interferenze dalle stazioni locali (computer) che emettono un
segnale elettromagnetico che potrebbe interferire con il segnale.
La perdita è causata di solito da sistemi elettronici, portati nella
stanza del magnete e la frequenza generata dall’apparecchio è
raccolta dalle bobine .
Figura 19 : artefatto a zipper. Prodotto da apparecchi elettronici presenti nella stanza
del magnete.
51
La
persistenza
del
problema
anche
dopo
la
rimozione
o
disconnessione elettrica degli apparecchi elettronici nella stanza può
indicare che la gabbia di Faraday è stata compromessa.
CAPITOLO 4
4.1 SUSCETTIVITA’ MAGNETICA
Se
una
sostanza
è
posta
in
un
campo
magnetico,
la
magnetizzazione è indotta all’interno della sostanza stessa e si
aggiunge alla magnetizzazione del campo magnetico applicato.
La proporzione fra la magnetizzazione indotta e quella relativa
al campo applicato è definita
suscettibilità
magnetica della
sostanza.
Questa è la misura del grado alla quale la sostanza è
suscettibile alla magnetizzazione attraverso un campo esterno.
L’importanza della suscettibilità magnetica può essere sia
negativa che positiva e può essere espressa in termini di unità
elettromagnetiche per grammo di metallo.
52
Questa
magnetizzazione
antiparallela
(diamagnetica)
indotta
o
può
essere
parallela
orientata
(paramagnetica,
ferromagnetica) al campo magnetico esterno.
La suscettività magnetica misura il grado di magnetizzazione in
un
materiale
in
corrispondenza
di
un
campo
magnetico.
Rappresentata dal simbolo χ, essa risulta essere il rapporto:
M
X=
H
dove M è la magnetizzazione ed H il campo magnetico
applicato.
Se χ è positiva, allora il materiale è detto paramagnetico ed il
campo magnetico è potenziato dalla presenza del materiale stesso,
se
la
suscettività
è
invece
negativa,
il
materiale
è
detto
diamagnetico ed il campo è indebolito dal materiale.
Caso a parte è un materiale ferromagnetico. In questo caso la
suscettività magnetica è non-lineare. La risposta è dipendente dallo
stato del campione e può andare in direzioni differenti da quelle del
campo applicato.
53
Figura 20 : La variazione della densità del flusso magnetico (numero delle linee di
forza) in un campo magnetico è illustrata in Figura per un campione diamagnetico
(a) e paramagnetico (b).
4.1.1 Materiali diamagnetici, paramagnetici e
ferromagnetici
I materiali magnetici sono suddivisibili in tre classi generali:
diamagnetici, paramagnetici e ferromagnetici, a seconda del diverso
comportamento magnetico assunto in presenza di un campo
applicato esterno, esplicitato attraverso il valore della suscettività.
54
4.1.1 a) Diamagnetismo
Le sostanze diamagnetiche reagiscono ad un campo esterno
(H)
manifestando
un
debole
momento
magnetico
indotto,
antiparallelo rispetto ad H, che scompare al venire meno del campo
stesso. Sono materiali i cui atomi non presentano un momento
magnetico spontaneo in quanto possiedono tutti gli orbitali atomici
riempiti o non ci sono elettroni spaiati; in presenza di un campo
esterno la loro tendenza è quella di modificare le orbite elettroniche
in modo da opporsi alla perturbazione imposta. Il diamagnetismo è
un fenomeno intrinseco di tutti i materiali, ma risulta evidente solo
quando ferromagnetismo e paramagnetismo non ne mascherano gli
effetti. Negli atomi che non presentano momento magnetico
intrinseco, questo fenomeno rappresenta l’unico effetto risultante
dall’applicazione di un campo esterno, inoltre il momento così
indotto
risulta
diamagnetiche
indipendente
dalla
temperatura.
presentano
suscettività
Le
sostanze
negativa,
piccola,
usualmente dell’ordine di 10-6-10-5, e sono contraddistinte da una
relazione linearmente inversa tra M e H. La suscettibilità negativa
deriva dall’induzione del campo magnetico esterno
per l’effetto
55
elettromagnetico ( la legge di Lenz) sul movimento orbitale
dell’elettrone.
I
momenti
magnetici
derivanti
dal
movimento
orbitale dell’elettrone o dallo spin nucleare sono molto più deboli (di
almeno due ordini di grandezza) di quelli risultanti dal movimento
dell’elettrone.
In molte sostanze il dipolo elettronico cancella il momento di
spin degli elettroni. Il Diamagnetismo si manifesta solo quando la
grande maggioranza degli elettroni sono “dipoli”.
La suscettibilità diamagnetica è generalmente indipendente da
fattori esterni. La maggior parte dei componenti inorganici e
organici sono esclusivamente diamagnetici, nel senso che ogni
atomo induce un effetto magnetico derivante dal movimento
orbitale e quindi una componente diamagnetica è presente in tutti i
materiali.
I materiali diamagnetici sono di basso interesse generale
come agenti di contrasto perché i loro effetti sul segnale nucleare è
trascurabile. I materiali diamagnetici sono stati usati come agenti di
contrasto in Risonanza Magnetica
per situazioni dove potessero
distribuirsi o amalgamarsi con un tessuto normale alterando
direttamente il segnale della regione sull’immagine.
Per esempio
56
l’acqua, il grasso e il perfluorocarbone e il diossido di carbonio sono
stati usati come agenti di
contrasto gastrointestinale, che hanno
un’azione di rimozione dei normali contenuti dell’intestino.
Le
sostanze
paramagnetiche
e
ferromagnetiche
sono
caratterizzate da effetti magnetici predominanti di spin elettronici
non appaiati. Tutti questi materiali hanno suscettibilità positiva e
quindi inducono una magnetizzazione positiva. Questi oggetti
tendono a muoversi verso un punto alto del campo quando è
applicato un campo magnetico esterno non uniforme.
4.1.1 b) Paramagnetismo
Gli atomi delle sostanze paramagnetiche sono caratterizzati dal
fatto di possedere un momento magnetico dovuto ad elettroni
spaiati
in
orbitali
parzialmente
riempiti.
Anche
le
sostanze
paramagnetiche presentano diamagnetismo, ma l’importanza di
questo fenomeno è mascherata dall’effetto di allineamento dei
momenti atomici. Le sostanze paramagnetiche presentano una
relazione lineare, direttamente proporzionale tra M e H, il valore
della loro suscettività è positivo, ridotto, decrescente (a parità di
57
campo) al crescere della temperatura. Nei materiali paramagnetici
la suscettività assume valori dell’ordine di 10
sostanze
occorre
una
dipendenza
della
-2
–10-4. Per tali
suscettività
dalla
temperatura espressa dalla legge di Curie :
χ=C/T
“C” è un parametro detto costante di Curie. Questa dipendenza
dalla temperatura si spiega considerando il materiale come un
insieme di momenti magnetici indipendenti, dovuti a ciascun atomo
(o molecola) che compone la sostanza. In assenza di un campo
applicato i singoli vettori m assumono direzioni casuali a causa
dell’agitazione termica, cosicché la magnetizzazione netta risultante
è nulla. Tuttavia, se si applica un campo, i momenti magnetici
tendono a disporsi lungo la sua stessa direzione, anche se sono
contrastati dall’agitazione termica che ne consente una parziale
orientazione. È possibile pertanto considerare la legge di Curie
come
descrittiva
del
paramagnetismo,
valutando
l’effetto
antagonista di due fenomeni:1) la tendenza dell’insieme dei
momenti magnetici m ad assumere direzione coincidente con quella
del campo esterno H; 2) l’agitazione termica degli atomi, che tende
ad imprimere una direzione casuale ad ogni momento intrinseco.
58
Si noti che la legge di Curie si basa sull’assunto che i momenti
magnetici degli atomi siano influenzati unicamente dal campo
esterno e dall’agitazione termica, non si considera una loro
interazione; inoltre quando H = 0 la direzione media dei momenti
atomici è casuale ed il momento risultante è nullo. Quando la
temperatura è molto bassa (T << 100 K) o il campo molto alto la
suscettività paramagnetica è indipendente dal campo applicato.
Sotto
queste
condizioni
la
suscettività
di
un
materiale
è
proporzionale al contenuto di ferro.
Come con i materiali diamagnetici
la misura
del campo
magnetico indotto entro il materiale è proporzionale alla forza del
campo applicato. Comunque la direzione del campo magnetico è
adesso allineata, invece che opposta al campo applicato.
4.1.1 c) Ferromagnetismo
Diversamente dai materiali paramagnetici, i momenti atomici
delle sostanze ferromagnetiche hanno fra loro interazioni molto
forti. Queste interazioni sono prodotte da forze di scambio tra
elettroni, come risultato di un allineamento parallelo o antiparallelo
dei momenti atomici. L’interazione fra i diversi momenti elettronici
59
è molto forte e tale da allineare tutti i momenti magnetici
elementari del materiale, anche in assenza di un campo esterno.
L’origine fisica del campo molecolare ha fornito la dimostrazione
teorica, associandola a un fenomeno quantistico legato alle forze di
interazione tra spin elettronici adiacenti. Inoltre, perché si possa
osservare il fenomeno della magnetizzazione spontanea in una
sostanza sono necessarie alcune condizioni:
•
gli atomi interessati devono possedere almeno un elettrone
spaiato
•
questi elettroni devono trovarsi in un orbitale direzionato,
come l’orbitale d o f
•
deve esserci una distanza interatomica adeguata perché si
verifichi
l’interazione
di
scambio
ferromagnetica
(se
gli
elettroni sono troppo vicini gli spin di segno uguale si
respingono, se sono lontani non si ha interazione).
Quando un materiale ferromagnetico subisce un riscaldamento,
perde le proprietà ferromagnetiche e si
comporta come un
paramagnete. Questo accade perché l’agitazione termica all’interno
del reticolo disturba l’allineamento dei momenti magnetici atomici
e, al di sopra della temperatura di Curie “Tc”, si ha il predominio
60
sulle forze di allineamento dei momenti magnetici, producendo così
un effetto di orientazione casuale. Quando la temperatura si
mantiene inferiore alla temperatura di Curie, T < Tc, il materiale
conserva
le
proprietà
ferromagnetiche.
Quando
T
=
Tc
la
suscettività diverge. Poiché esiste proporzionalità diretta tra la
temperatura di Curie e la costante del campo molecolare, Tc
fornisce una misura della forza d’interazione tra i momenti
magnetici degli atomi. Inoltre, la temperatura di Curie è una
proprietà caratteristica di ogni sostanza. In natura esistono tre soli
elementi ferromagnetici a temperatura ambiente: il ferro (TC =
770°C), il cobalto (TC = 1131°C) e il Nichel (TC = 358°C).
Il comportamento di un materiale ferromagnetico sotto l’azione
di un campo esterno, oltre che dall’energia di scambio, è regolato
dall’equilibrio di diversi altri termini energetici. Il processo di
magnetizzazione di un materiale come risposta a un campo
applicato, per esempio, è di norma anisotropo, dipende cioè dalla
direzione lungo la quale il campo e la magnetizzazione sono
rilevate. Si può considerare l’anisotropia come una forza che tende
a vincolare il vettore magnetizzazione lungo particolari direzioni;
esistono tre tipi fondamentali di anisotropia: 1) cristallina, legata a
61
proprietà intrinseche del materiale; 2) indotta, causata da effetti di
riordinamento atomico nella struttura reticolare dovuta a sforzi
applicati (ad esempio trattamenti termici applicati sotto tensione
meccanica o in presenza di un campo esterno); 3) di forma,
determinata dalla geometria del campione in esame. Nel caso
dell’anisotropia cristallina vi sono alcuni assi cristallografici definiti
direzioni di facile magnetizzazione, determinati dalla simmetria
reticolare, lungo i quali il processo di magnetizzazione è favorito; in
assenza di campo applicato il vettore magnetizzazione tende a
disporsi lungo tali assi, inoltre lungo tali direzioni la saturazione si
raggiunge a campi applicati più bassi. Per deviare il vettore M da
tali direzioni occorre compiere un lavoro equivalente all’energia di
anisotropia magneto-cristallina immagazzinata nella struttura del
materiale; l’origine di questo genere di anisotropia è da ricondursi
al tipo d’interazione che si stabilisce tra gli spin elettronici e gli
orbitali dei legami interatomici nei solidi (campo cristallino).
Un altro termine energetico entra in gioco quando gli spin si
allineano
lungo
la
direzione
del
campo
esterno;
grazie
all’accoppiamento spin-orbita, anche gli orbitali d o f, responsabili
del ferromagnetismo, si orientano. Poiché questi orbitali non
62
possiedono
simmetria
sferica,
si
ha
come
conseguenza
una
deformazione della struttura, un riarrangiamento delle orbite che
comporta una deformazione elastica del materiale. In conclusione
tutti i materiali godono di proprietà magnetiche:
•
I materiali ferromagnetici sono fortemente attratti da
magneti
•
I materiali non ferromagnetici sono debolmente respinti o
debolmente attratti
4.1.2 Artefatto metallico prodotto nell’imaging di
Risonanza Magnetica
4.1.2 Impianti metallici
I
rischi
potenziali
associati
all’utilizzo
della
Risonanza
Magnetica in pazienti con impianti ferromagnetici sono correlati
all’introduzione
di
correnti
elettriche,
riscaldamento,
l’
interpretazione sbagliata di un artefatto come una cosa patologica e
la possibilità di movimento o rimozione dell’impianto.
63
Correnti elettriche: Le correnti elettriche possono essere
generate in materiali conduttivi da gradienti di campo magnetico o
dal
movimento
di
materiali
conduttivi
attraverso
il
campo
magnetico statico. Gli impianti conduttivi possono essere riscaldati
dall’introduzione di forze elettromotive soggette ai gradienti del
campo magnetico statico.
4.1.2 Artefatti nell’immagine di Risonanza Magnetica
Gli
oggetti
metallici
non
ferromagnetici
appaiono
nelle
immagini di risonanza magnetica come zone focali caratterizzate da
intensità di segnale molto bassa o assente. Questo tipo di artefatto
è comunque limitato all’area dove si trova la struttura metallica
(clips, vite, protesi articolare, ecc..) che lo causa e interferisce
parzialmente con la lettura di tutta l’immagine.
La distorsione dell’immagine per la presenza di un oggetto
metallico è causata dalla variazione del campo magnetico locale che
perturba il rapporto tra posizione e frequenza che è fondamentale
per la corretta ricostruzione dell’immagine.
Il grado di distorsione dell’immagine dipende dalla suscettibilità
magnetica, dalla dimensione, dalla forma, dall’orientamento e dalla
64
posizione dell’oggetto nel corpo, così come dalla tecnica utilizzata
per acquisire le immagini (es:i parametri specifici delle sequenze) e
dalla ricostruzione dell’immagine. Questo artefatto lo si può
correggere in genere con la semplice rimozione dei metalli quando
possibile (protesi dentarie, oggetti metallici su indumenti).
Gli oggetti non ferromagnetici tendono a produrre artefatti
meno evidenti rispetto agli oggetti ferromagnetici.
Gli oggetti metallici ferromagnetici oltre all’area focale a bassa
intensità di segnale, provocano la distorsione e l’obliterazione del
segnale proveniente anche dai tessuti circostanti, rendendo così
l’immagine non diagnostica. Oggetti metallici grandi ma non
ferromagnetici come le protesi d’anca, provocano ampie zone focali
di perdita di segnale con parziale distorsione della restante
immagine; al contrario piccole quantità di sostanza ferromagnetica,
come l’ossido di ferro contenente in alcuni trucchi, sono sufficienti
per produrre gravi distorsioni delle immagini.
L’effetto missile: è la causa più comune di danno legato
all’uso dell’imaging di Risonanza Magnetica.
L’effetto missile si
riferisce alla capacità del campo magnetico statico di attrarre
65
oggetti ferromagnetici
che possono essere spinti di conseguenza
nel magnete da forza considerevole.
Questa situazione può essere un rischio considerevole per il
paziente dentro lo scanner o per qualsiasi altra persona che si trovi
sulla traiettoria del missile ferromagnetico.
In casi estremi il magnete deve essere “spento”per estrarre
degli oggetti ferromagnetici dai sistemi di Risonanza Magnetica con
magneti superconduttori.
Per proteggere dalle catastrofi causate dell’effetto missile,
l’area immediata intorno al magnete della Risonanza Magnetica
deve essere marcata, delineata e descritta con segnaletica di
attenzione e messa in sicurezza da staff a conoscenza della
sicurezza.
In più tutti i pazienti, i visitatori e altre persone che entrano
nell’area del magnete devono essere protetti e gli devono essere
tolti oggetti metallici e devono essere informati sul possibile rischio.
Vari fattori influenzano il rischio di eseguire un esame di
Risonanza
Magnetica in un paziente con
protesi, dispositivi,
materiali o oggetti ferromagnetici, tra cui l’intensità del campo
magnetico
statico
e
dei
gradienti
di
campo,
il
grado
di
66
ferromagnetismo
dell’oggetto,
la
geometria,
la
sede,
e
l’orientamento dell’oggetto in esame ed il tempo intercorso dal suo
posizionamento.
Questi fattori dovrebbero essere attentamente considerati
prima di sottoporre ad un paziente con protesi ferromagnetica
all’esame di Risonanza Magnetica, soprattutto se è localizzato in
un’area del carpo potenzialmente pericolosa come vicino a strutture
nervose o tessuti molli nei quali il
movimento o la dislocazione
dell’oggetto potrebbe provocare un danno al paziente.
CAPITOLO 5
5.1 PARTE SPERIMENTALE
5.1.1Introduzione
La Risonanza Magnetica riveste un ruolo di esame di prima
scelta, oltre che nella diagnosi di molte patologie osteoarticolari,
67
midollari o lesioni trabecolari delle ossa, anche nella valutazione di
follow up dopo interventi chirurgici in pazienti con impianti metallici
in cui si presenti o persista una sintomatologia dolorosa. La
possibilità di effettuare studi multiplanari, l’elevato contrasto ma
soprattutto la possibilità di eseguire sequenze sempre più veloci che
risentono poco degli artefatti provocati da eventuali impianti
metallici, rendono la Risonanza Magnetica ormai insostituibile in
questo ambito diagnostico.
5.1.2 Criteri di compatibilità dei mezzi di sintesi metallici
con la risonanza magnetica
Sebbene l’elenco delle protesi, materiali, dispositivi ed oggetti
testati
per
proprietà
ferromagnetiche
sia
stato
pubblicato
e
aggiornato in diverse occasioni, sono necessari alcuni consigli e
precauzioni nel loro utilizzo.
Le case di produzione possono cambiare la composizione delle
protesi, materiali, dispositivi o oggetti senza che ne sia richiesta la
notifica o un’approvazione dalla Food And Drug Administration
(FDA) a condizione che la funzione della protesi rimanga la stessa.
68
Pertanto,
le
sedi
ove
si
eseguono
esami
di
Risonanza
Magnetica possono scegliere di eseguire delle linee guida e come
contattare la ditta di produzione del dispositivo se, dalla precedente
valutazione, siano stati modificati alcuni componenti.
E’ disponibile l’elenco di tutti i devices sinora testati su
apparecchi da 1,5-3T on-line sul sito www.mrisafety.com.
Numerosi studi stabiliscono le proprietà ferromagnetiche dei
diversi
impianti,
materiali,
dispositivi
ed
oggetti
biomedici,
misurando le forze di deflessione, di attrazione o altri aspetti
di
interazione associati al campo magnetico statico e/o generati dai
gradienti di un sistema di Risonanza Magnetica. Gli
studi hanno
dimostrato che le procedure di Risonanza Magnetica possono essere
eseguite
tranquillamente
se
l’oggetto
metallico
non
è
ferromagnetico o se risulta solo minimamente attratto dal campo
magnetico in relazione alla sua applicazione in vivo.
Ogni
protesi, materiale,
dispositivo
ed
oggetto
metallico
dovrebbero essere sperimentato con tecniche ex vivo prima di
procedere ad un esame di Risonanza Magnetica nei pazienti in cui è
posizionato.
69
Successivamente a tale esame, deve essere determinata la
presenza e il relativo grado di ferromagnetismo, in tal modo da
poter prendere una decisone competente a riguardo di eventuali
rischi associati, dovuti ad interazioni con i campi magnetici
dell’apparecchio di Risonanza Magnetica.
In ultima analisi come si è già accennato, alcuni corpi estranei,
protesi o dispositivi metallici anche se debolmente ferromagnetici,
pur non pregiudicando la sicurezza dei pazienti portatori che devono
essere sottoposti ad esame di Risonanza Magnetica,
producono
artefatti.
L’entità degli artefatti dipende dalla massa, dalla suscettibilità
magnetica, dalla forma, dall’orientamento degli oggetti metallici
nonché dall’intensità del campo magnetico statico e dal tipo di
sequenza impiegata.
5.1.3 Risultati e Conclusioni
Il medico radiologo ha messo a confronto le immagini di tutti
gli esami eseguiti in questo studio prendendo in considerazione le
dimensioni dell’area di caduta del segnale che si determinava
70
intorno all’impianto metallico e l’interferenza che la stessa aveva
sulle regioni di maggiore interesse dal punto di vista diagnostico: in
particolare si è valutato se e quanto l’artefatto da suscettibilità
magnetica interferiva con la visualizzazione della protesi.
In questo caso l’osservazione ha comportato la valutazione di
tutte le sequenze effettuate nelle indagini eseguite nel corso dello
studio e la comparazione di altri esami a cui era stato sottoposto il
paziente stesso.
Dalla nostra osservazione sono emersi differenti elementi.
Il corretto
posizionamento
del
paziente
ha sempre
una
fondamentale importanza in Risonanza Magnetica ma, per pazienti
con impianti metallici tale aspetto assume rilevanza apicale.
Come è noto anche in letteratura le sequenze Gradient Echo,
che maggiormente risentono degli effetti di suscettibilità magnetica,
poco si prestano agli studi in Risonanza Magnetica in soggetti con
impianti metallici.
Nel nostro caso abbiamo messo a confronto le immagini
ottenute con una scansione coronale Gradient Echo ( Medic ) con
una scansione coronale Turbo Spin Echo. Nelle immagini ottenute
con Turbo Spin Echo gli artefatti risultavano di modesta entità,
71
mentre nelle sequenze Gradient Echo si verificava un’estesa
distorsione con conseguente impossibilità di fare diagnosi.
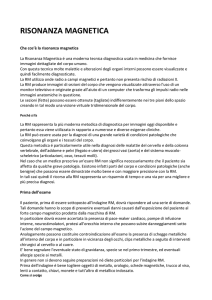
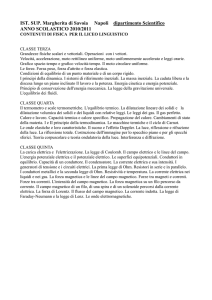
Figura 21 : Immagine Gradient Echo: l’artefatto si presenta in maniera molto
evidente con una grande area di distorsione.
72
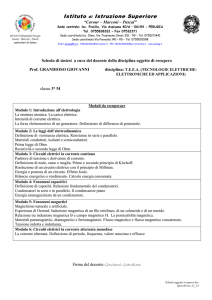
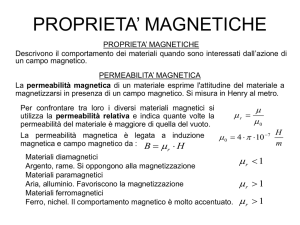
Figura 22 :Immagine Turbo Spin Echo: l’artefatto è limitato all’area dell’impianto
metallico risultando di modesta entità
Nelle sequenze assiali pesate in T1 - T2- DP, sono state
apportate alcune variazioni nella costruzioni della sequenza. Sono
state innanzitutto effettuate sequenze Turbo Spin Echo variando
l’ETL, TE rispetto alle sequenze standard.
In questo modo sono state ottenute significative modificazioni
per quel che concerne la formazione di artefatti.
Nella
Sequenza coronale Turbo Spin Echo pesata in T2 con
modifica dei parametri TE, ETL l’artefatto risulta ancora molto
73
evidente e l’area circostante la protesi risulta distorta impedendo al
medico radiologo di fare una giusta diagnosi.
Figura 23 : Immagine Turbo Spin Echo coronale T2: sono state apportate leggere
variazioni del TE e ETL ma l’artefatto risulta ancora molto evidente.
Nelle sequenze assiali T1-T2-DP sono stati apportati in maniera
più significativa le variazioni del TE e l’ETL. Infatti come si può
notare l’area di vuoto del segnale viene limitato all’area della
protesi
e
rendendo
così
l’immagine
pulita
da
artefatti
da
suscettibilità magnetica e permettendo al medico radiologo di fare
una giusta diagnosi.
74
Figura 24 : Immagine Turbo Spin Echo assiale T1
Figura 25 : Immagine Turbo Spin Echo assiale T2
75
Figura 26 : Immagine Turbo Spin Echo assiale DP
Una
minima
variazione
dell’area
di
alterato
segnale
da
impianto metallico RM-compatibile varia in parte anche in rapporto
ad altri paramenti quali il gap, le dimensioni del FOV, il bandwidtch
di radiofrequenza e la matrice.
I trattamenti chirurgici con mezzi di sintesi metallici non sono
infrequenti, possono essere di tipo diverso e richiedono nel followup e nel controllo post-chirurgico il ricorso alla diagnostica con
Risonanza Magnetica.
Attualmente vengono utilizzati metalli non ferromagnetici come
il titanio puro, le leghe al titanio, il nitinolo ed altri composti.
76
L’elemento che era stato impiantato nel nostro paziente, del nostro
studio era costituita da lega in titanio.
Le
leghe
in
titanio
hanno
il
vantaggio
di
non
essere
ferromagnetiche e di essere Rm-compatibili. Oggetti costruiti con
tali metalli se vengono introdotti nel campo magnetico statico di
elevata intensità (1,5T) non subiscono movimenti di traslazione, né
una significativa distorsione. Per tale motivo è possibile sottoporre
all’esame di Risonanza Magnetica i soggetti a cui siano stati
impiantati mezzi di sintesi al titanio subito dopo l’intervento
chirurgico.
Per contro le caratteristiche di tali materiali sono tali da
produrre artefatti caratterizzati da una zona di caduta del segnale,
non solo nella sede dell’impianto, ma anche nelle immediate
vicinanze.
Sebbene le alterazioni siano contenute rispetto a quanto si
verificava con i vecchi materiali ferromagnetici, bisogna tuttavia
tenere conto e trovare artifizi che ne riducano gli effetti negativi
sulla qualità delle immagini. La prima considerazione da fare è
l’entità e l’estensione dell’area di caduta del segnale che è
77
strettamente
correlata
alle
dimensioni,
alla
massa
e
all’orientamento del mezzo di sintesi.
Per tale motivo vi è un’ aumentata
tendenza ad utilizzare
strumenti che uniscono il pregio della resistenza a quello delle
dimensioni più contenute.
Per quanto concerne i parametri di Risonanza Magnetica la
nostra esperienza è i linea con quanto risulta dalla letteratura: le
sequenze Gradient Echo sono quelle che più risentono degli artefatti
da suscettibilità magnetica e che pertanto non sono assolutamente
da utilizzare in soggetti sottoposti ad interventi chirurgici di osteosintesi, mentre le sequenze Turbo Spin Echo sono le più idonee
nello studio di pazienti sottoposti ad interventi chirurgici che
impiegano mezzi di sintesi.
Con l’impiego di sequenze Turbo Spin Echo i dati sono univoci
in quanto , infatti, l’incremento del numero dell’ETL e la riduzione
del TE ha dimostrato una riduzione dell’ampiezza dell’area di
alterato segnale e globalmente, tali variazioni si sono dimostrate
significative.
Il nostro studio è stato mirato alla ricerca dei parametri che
risultassero ottimali, con l’apparecchiatura di Risonanza Magnetica
78
utilizzata presso il nostro Servizio, nella valutazione pre e post
operatoria di pazienti poratori di mezzi di sintesi metallici.
La necessità di offrire un’ottimale accuratezza diagnostica
deriva dall’esigenza di ridurre sia il tempo di ospedalizzazione, sia i
rischi intra-opratori, che le complicanze post-operatorie secondarie
all’intervento chirurgico e di poter studiare nel tempo questi
pazienti.
79
BIBLIOGRAFIA
1) S. Webb
The Physics of Medical Imaging (Medical Science Ser)
Iop Publishing Ldt-1988
2) F.Mazzucato
Anatomia Radiologica – II Tecnica e metodologia
propedeutiche alla diagnostica mediante immagini
Piccin Padova-1997
3) G.Gavelli, A. Lentini
Guida Alla Diagnostica per immagini con le tecniche
computerizzate Vol. I Tomografia Computerizzata
Risonanza Magnetica
Piccin Padova-1998
4) D. G. Mitchell
Principi di risonanza magnetica
Centro Scientifico editore -1999
80
1) Sofka CM, Potter HG, Figgie M, Laskin R.
Magnetic resonance imaging of total knee arthroplasty
Clinical orthopaedics and related research-2003 Jan;(406):129-35
2)Alfred Stadler, Wolfgang Schima, Ahmed Ba-Ssalamah,
Joachim Kettenbach and Edith Eisenhuber
Artifacts in body MR imaging: their appearance and how
to eliminate them.
European Radiology-2006;Vol. 17, N° 5 / May, 2007, 1242–1255
3) Jiachen Zhuo, MS and Rao P. Gullapalli, PhD
AAPM/RSNA Physics Tutorial for Residents,MR Artifacts,
Safety, and Quality Control
RadioGraphics -2006;26:275-297
4) Olsen RV, Munk PL, Lee MJ, Janzen DL, MacKay AL, Xiang QS,
Masri B.
Metal artifact reduction sequence: early clinical
applications
Radiographics-2000 May-Jun;20(3):699-712
81
5) Potter HG, Foo LF
Magnetic resonance imaging of joint arthroplasty
The Orthopedic clinics of North America- 2006 Jul;37(3):361-73,vivii
6) Potter HG, Foo LF
Magnetic resonance imaging of joint arthroplasty
The Orthopedic clinics of North America-2006 Jul;37(3):361-73, vivii
SITI INTERNET CONSULTATI
1) Enciclopedia libera :
www.wikipedia.org
2) Portale d’informazioni di Risonanza Magnetica:
www.risonanzamagnetica.org/edu/safety
3) Le Basi della Risonanza Magnetica:
www.cis.rit.edu/htbooks/mri//
82