CONTROLLI AUTOMATICI (01AKS, 02FSQ)
I esercitazione presso il LADISPE
Identificazione di un modello di motore elettrico e
controllo in catena chiusa del dispositivo
Il sistema fisico che sarà utilizzato in queste esercitazioni sperimentali è un motore elettrico in
corrente continua che, seppur costruito esclusivamente per scopi didattici, è rappresentativo di
molti altri sistemi più complessi utilizzati in vari campi della tecnologia moderna.
Nella presente esercitazione, dopo aver introdotto il modello matematico e il corrispondente
schema a blocchi del dispositivo, sarà effettuata l’identificazione di un modello approssimato
del sistema reale e si procederà al suo controllo in catena chiusa mediante controllori in cascata
di tipo proporzionale e proporzionale-derivativo.
Si possono evidenziare 3 distinti blocchi funzionali del dispositivo:
• l’attuatore, che riceve in ingresso la tensione di comando u e fornisce in uscita la tensione
di armatura va , può essere adeguatamente descritto dalle seguenti equazioni differenziali:
dva (t)/ dt = [vi (t) − Rs ia (t)] KP W M / τa
dvi (t)/ dt = u(t)
• il motore elettrico propriamente detto, comandato in armatura mediante la tensione va
e soggetto alla coppia di disturbo Td , è descritto dalle equazioni differenziali:
La · dia (t)/ dt = −Ra ia (t) − Km ω(t) + va (t)
J · dω(t)/ dt = Km ia (t) − βω(t) − Td (t)
• il trasduttore, costituito da una dinamo tachimetrica che misura la velocità angolare ω
dell’albero motore mediante sensori ottici e fornisce in uscita una tensione Vω , è descritto
dalla seguente relazione statica:
Vω (t) = Kt · ω(t)
I valori numerici dei parametri nominali sono: Rs = 7.525Ω, KP W M = 2.925, τa = 10−3 s,
La = 3.24 · 10−3 H, Ra = 6Ω, Km = 0.0535V s/rad = 0.0535Nm/A, J = 19.74 · 10−6 kg m2 ,
β = 17.7·10−6 N s/m, Kt = 0.02Vs.
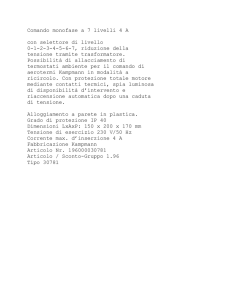
1. Corrispondenze con l’impianto reale
Nella figura sottostante è rappresentato lo schema a blocchi in Simulink del sistema fisico e, in
particolare, sono evidenziate le corrispondenze delle connessioni con i morsetti numerati della
plancia multifunzione:
Modello completo
del motore elettrico
1
In1: u
u
1/s
Vi
Km
Costante
di velocita'
29
1/(tau_a*s)
18
LTI System
Filtro
controllo
corrente
Va
Kpwm
30
1/(Ra+s*La)
Ia
Km
19
Guadagno
PWM
Dinamica
elettrica
motore
1/(Beta+s*J)
Costante
di coppia
Dinamica
meccanica
motore
Kt
Td
Rs
Resistenza
shunt
1
Out1:
omega
In2: Td
2
23
2
Si noti che solo l’ingresso In1:u e l’uscita Out2:V omega sono effettivamente disponibili.
1
Gain
Out2:
V_omega
2. Identificazione di un modello del primo ordine del
dispositivo a partire da dati sperimentali
L’obiettivo della prima parte dell’esercitazione consiste nell’identificare, a partire da dati sperimentali, la funzione di trasferimento Vω (s)/Vi (s) del dispositivo costituito dall’attuatore, dal
motore elettrico e dalla dinamo tachimetrica, senza considerare quindi il polo nell’origine inserito dall’attuatore. In particolare, si vuole determinare un modello approssimato del primo
ordine, del tipo:
KF
F (s) =
e−θF s
1 + τF · s
2.1. Stima del guadagno stazionario KF
• Annotare l’identificativo della plancia e del motore utilizzati nella presente esercitazione.
• Verificare i collegamenti dei due alimentatori e del motore alla plancia multifunzione.
• Sulla plancia multifunzione, collegare la boccola 29 alla boccola 30, per il corretto funzionamento dell’attuatore.
• Verificare che la manopola della dinamo tachimetrica sia posta esattamente in corrispondenza dell’apposita tacca riportata sulla plancia.
• Collegare il morsetto “OUTPUT” del generatore di segnali alla plancia multifunzione
mediante cavo coassiale e opportuno adattatore, connettendone il filo rosso alla boccola 18
(tensione d’ingresso Vi dell’attuatore) ed il filo nero ad una qualsiasi massa della plancia.
• Per fare interagire il calcolatore con l’intero dispositivo, eseguire le seguenti operazioni:
– tramite cavo coassiale e opportuno adattatore, collegare l’ingresso “Input 1” del
modulo di interfaccia con il calcolatore alla boccola 18 della plancia multifunzione,
per acquisire la tensione d’ingresso Vi dell’attuatore;
– tramite cavo coassiale e opportuno adattatore, collegare l’ingresso “Input 2” del
modulo di interfaccia con il calcolatore alla boccola 23 della plancia multifunzione,
per acquisire la tensione Vω fornita dalla dinamo tachimetrica, proporzionale alla
velocità angolare ω del motore elettrico.
• Mediante il generatore di segnali, imporre come tensione d’ingresso Vi dell’attuatore una
serie di diversi valori di una tensione continua nell’intervallo [0V, 2.5V].
ATTENZIONE: il valore effettivo della tensione Vi applicata all’attuatore è il doppio del
valore indicato sul display del generatore di segnali.
• Mediante Matlab 6, per ogni valore di tensione d’ingresso Vi acquisire dal dispositivo
i corrispondenti segnali con il comando data = rtacq; abilitando nell’apposita finestra
l’acquisizione dei dati dai canali CH1 e CH2.
• Cliccare il tasto “Close” per salvare, nel vettore data precedentemente definito, i dati
riportati nella finestra di acquisizione nel momento in cui viene premuto tale tasto.
• Al termine di ogni acquisizione, valutare i valori medi dei due segnali acquisiti mediante il
comando mean(data) e memorizzarli in due distinti vettori Vi e Vomega per la successiva
elaborazione.
• Dopo aver effettuato tutte le acquisizioni per i diversi valori della tensione d’ingresso Vi ,
tracciare la caratteristica statica Vω (Vi ) mediante il comando plot(Vi,Vomega,’o’).
• Determinare la cosiddetta “zona morta”, ossia l’insieme dei valori della tensione d’ingresso
che non provocano alcun movimento del motore elettrico, a causa dell’attrito statico che
agisce sull’albero motore.
2
• Al di fuori della zona morta, la relazione statica fra Vi e Vω può essere descritta in prima
approssimazione dalla seguente caratteristica lineare:
Vω = KF · Vi + Vof f set
dove KF e Vof f set sono i parametri da stimare.
• Considerando solo i dati compresi nell’intervallo di linearità, si ottiene:
Vω,1
Vi,1 1
Vω,2 Vi,2 1
K
F
. = .
..
. .
· V
of f set
. .
.
Vω,N
Vi,N 1
B
x
A
e quindi il problema di stima è nella forma standard Ax = B.
• Ricavare la stima dei parametri KF e Vof f set con il metodo dei minimi quadrati utilizzando
il comando A\B (per maggiori informazioni sul comando \, digitare help mldivide).
2.2. Stima dei parametri della funzione di trasferimento Vω (s)/Vi (s) e
verifica della stima del guadagno stazionario KF
• Spegnere il generatore di segnali e scollegarlo dalla plancia multifunzione, lasciando invariati tutti gli altri collegamenti.
• Collegare il morsetto “Out1” del modulo di interfaccia con il calcolatore alla plancia
multifunzione mediante cavo coassiale e opportuno adattatore, connettendone il filo rosso
alla boccola 18 (tensione d’ingresso Vi dell’attuatore) ed il filo nero ad una qualsiasi massa
della plancia.
• Mediante Matlab 6, applicare un’onda quadra avente le seguenti caratteristiche:
ampiezza picco-picco = 0.35V, offset di tensione = 2V, periodo = 50s, duty cycle = 80%;
a tale scopo, utilizzare il comando rtwavege(nc,param), avendo definito:
– nc=1, per inviare la forma d’onda sul morsetto “Out1” del modulo di interfaccia con
il calcolatore;
– param=[2,50,0.35,0.8,2], le cui componenti rappresentano, nell’ordine:
tipo di forma d’onda, periodo, ampiezza picco-picco, duty-cycle, offset di tensione
(per maggiori informazioni, digitare help rtwavege).
Se necessario, ridurre opportunamente l’ampiezza picco-picco dell’onda quadra e/o dell’offset di tensione, per far sı̀ che il sistema possa raggiungere il valore di regime permanente
senza mai fermarsi.
• Acquisire dal dispositivo i segnali con il comando data=rtacq; abilitando nell’apposita
finestra l’acquisizione dei dati dai canali CH1 e CH2, impostando il tempo di campionamento Ts = 0.01s, definendo il numero di campioni N = 5000 e scegliendo ymin = 0 per
una migliore visualizzazione dei risultati.
• Cliccare il tasto “Close” per salvare nel vettore data i dati riportati nella finestra di
acquisizione nel momento in cui viene premuto tale tasto. Bloccare l’acquisizione in
modo da visualizzare la risposta del sistema ad un intero fronte di salita dell’onda.
• Tracciare l’andamento temporale dei dati mediante il comando plot(t,data) avendo
definito t=0:0.01:0.01*(length(data)-1).
• Salvare su file i dati acquisiti mediante l’istruzione save <filename> data, permettendo
cosı̀ di riportarli sulla relazione (utilizzare il comando help save per maggiori dettagli).
3
• In base all’andamento temporale ottenuto, utilizzando il metodo della tangente descritto
nel seguito, determinare il guadagno stazionario KF , la costante di tempo τF ed il ritardo
θF del modello del primo ordine della funzione di trasferimento Vω (s)/Vi (s) del dispositivo.
Si consiglia di effettuare tali valutazioni sulle stampe dei grafici ottenuti.
• Ripetere la prova almeno tre volte, in modo da poter mediare tra i valori ottenuti dei parametri KF , τF e θF . Nota bene: digitare sempre il comando rtfine prima di applicare
una nuova forma d’onda con il comando rtwavege.
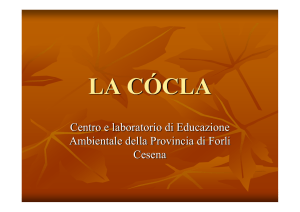
• Metodo della tangente. Si consideri la risposta al gradino del sistema descritto da una funzione di trasferimento caratterizzata da un solo polo reale ed un ritardo: F (s) =
Dall’analisi di tale risposta risulta che:
KF
e−θF s .
1 + τF · s
22
20
y
18
16
14
12
10
8
6
4
u
2
0
θ
θ +τ
F
−2
0
2
F
4
6
F
8
10
12
14
16
18
20
22
24
26
28
30
– il valore del guadagno stazionario KF è pari al rapporto tra il valore di regime y dell’uscita
e l’ampiezza u del gradino d’ingresso;
– il piede della tangente alla curva nel punto di massima pendenza corrisponde all’istante
t = θF ;
– l’intersezione di tale tangente con l’asintoto al valore di regime dell’uscita corrisponde
all’istante t = θF + τF ; si osservi che y (θF + τF ) = 0.63 · y.
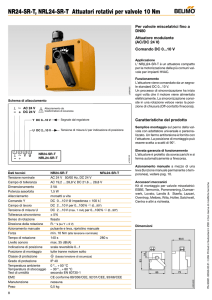
Se si considera la risposta dello stesso sistema ad un’onda quadra con ampiezza picco-picco ∆u
e offset uof f set , si osserva che, non appena l’andamento dell’uscita diventa di tipo periodico:
26
26
24
24
y
22
22
20
20
18
18
16
16
14
14
12
12
vedi
zoom
a lato
10
10
8
8
6
6
4
4
u
2
0
y
u
2
0
10
20
30
40
50
60
70
80
90 100 110 120 130 140 150 160 170 180 190 200 210
0
130
t0
132
134
136
138
140
t0+θF
142
144
t0+θF+τF
146
148
150
152
154
156
158
160
– il valore del guadagno stazionario KF è pari al rapporto tra la differenza dei due valori di
regime dell’uscita y M AX ed y min e l’ampiezza picco-picco ∆u dell’onda quadra d’ingresso;
– l’intersezione della tangente alla curva nel punto di massima pendenza con la retta y = y min
corrisponde all’istante t = t0 + θF , essendo t0 l’istante in cui l’ingresso passa dal valore
umin al valore uM AX ;
– l’intersezione di tale tangente con l’asintoto al valore di regime dell’uscita corrisponde
all’istante t = t0 + θF + τF ; si osservi che y (t0 + θF + τF ) = 0.63 · (y M AX − y min ) + y min .
4
3. Controllo in catena chiusa del dispositivo mediante
controllori in cascata di tipo P e PD
Per il controllo in catena chiusa del dispositivo, effettuare le seguenti connessioni sulla plancia:
3
5
6
17
18
1/s
C(s)
V_omega_rif
Set point
generator
10
u
4
Controllore
in cascata
Integratore
dell'attuatore
Vi
V_omega
In: Vi
Out: V_omega
Dispositivo:
attuatore (senza 1/s),
motore elettrico,
dinamo tachimetrica
23
Scope
Obiettivo di questa seconda parte dell’esercitazione è lo studio della possibilità di ottenere
soddisfacenti risultati controllando il motore mediante il blocco di compensazione presente sulla
plancia multifunzione, considerando anche il polo in s = 0 (integratore) inserito dall’attuatore.
Il controllore (o compensatore) è ad azione proporzionale-integrale-derivativa (PID):
1
τd · s
+
C(s) = Kp +
τi · s 1 + τ0 · s
Ciascuna delle tre azioni può essere selezionata in modo indipendente agendo opportunamente
sui relativi potenziometri (oltre ad effettuare le connessioni fra le boccole 11 e 12, 13 e 14, 15
e 16 rispettivamente).
3.1. Controllo mediante compensatore proporzionale P
• Approssimare il modello del motore elettrico, comprensivo del polo in s = 0 inserito
dall’attuatore, con la funzione:
1
KF
F (s) = F (s) =
s
s (1 + τF · s)
in cui KF e τF assumono i valori precedentemente stimati, mentre il termine di ritardo
viene ritenuto trascurabile (θF 0).
• Considerare come compensatore C(s) = KP e valutare analiticamente come deve essere
scelto KP affinché il sistema risultante ad anello chiuso sia asintoticamente stabile ed abbia
(i) poli reali, oppure (ii) poli complessi coniugati con fattore di smorzamento ζ > 0.707.
• Valutare se l’intervallo di valori di KP selezionabili mediante la manopola posta sulla
plancia multifunzione permette di assegnare KP in modo tale da soddisfare tali requisiti
(vedere tabella fornita in laboratorio); in caso contrario, assegnare il valore minimo di
KP consentito. Inserire quindi il solo compensatore proporzionale, collegando le boccole
11 e 12.
• Mediante la manopola di set-point della plancia, assegnare diversi valori costanti di velocità di riferimento, compresi fra i 2000 ed i 3500 giri al minuto. Se necessario, al posto
del set-point della plancia, utilizzare il calcolatore per applicare con il comando rtwavege
un’opportuna onda quadra, come descritto al punto 2.2
• Collegare il calcolatore, mediante l’apposito modulo di interfaccia, per acquisire la tensione di riferimento Vrif (proporzionale al corrispondente set-point di velocità imposto) e
la tensione di uscita Vω dalla dinamo tachimetrica, eseguendo le seguenti operazioni:
– tramite cavo coassiale e opportuno adattatore, collegare l’ingresso “Input 1” del
modulo di interfaccia con il calcolatore alla boccola 3 della plancia multifunzione,
per acquisire la tensione di riferimento Vrif ;
5
– tramite cavo coassiale e opportuno adattatore, collegare l’ingresso “Input 2” del
modulo di interfaccia con il calcolatore alla boccola 23 della plancia multifunzione,
per acquisire la tensione Vω fornita dalla dinamo tachimetrica, proporzionale alla
velocità angolare ω del motore elettrico.
• Mediante Matlab 6, acquisire tali tensioni con il comando data=rtacq; abilitando
nell’apposita finestra l’acquisizione dei dati dai canali CH1 e CH2, impostando il tempo
di campionamento Ts = 0.01s.
• Far variare il valore della velocità di riferimento nell’intervallo assegnato, in modo tale da
valutare il comportamento del sistema durante le fasi di transitorio. Modificare eventualmente il numero di campioni acquisiti ed i valori minimo e massimo dell’uscita per una
migliore visualizzazione ed acquisizione dei dati.
• Ripetere la prova con diversi valori di KP .
• Riportare i risultati ottenuti sulla relazione, confrontandoli con quanto ottenuto in simulazione (mediante il simulatore precedentemente realizzato in Simulink) per gli stessi
valori di KP , a fronte degli stessi valori di tensione di riferimento. Analizzare e giustificare
le differenze di comportamento, tenendo conto della presenza di attriti statici e di primo
distacco e di saturazioni all’uscita dei diversi stadi della plancia multifunzione.
3.2. Controllo mediante compensatore proporzionale-derivativo PD
τd · s
, ove τ0 τd .
1 + τ0 · s
• Fissare Kp e τd ai valori minimi selezionabili dalle rispettive manopole; inserire i corrispondenti blocchi P e D del compensatore collegando le boccole 11 e 12, 15 e 16.
• Considerare come compensatore C(s) = Kp +
• Considerare le stesse tensioni di riferimento (ovvero le stesse velocità di set-point) applicate al punto 3.1 e lasciare inalterati tutti gli altri collegamenti.
• Ripetere le prove effettuate al punto 3.1, acquisendo con analoga procedura Vrif e Vω .
• Considerare diversi valori di KP e τd selezionabili dalle manopole (vedere tabella fornita in
laboratorio) e riportare sulla relazione i risultati ritenuti più significativi, confrontandoli
con quanto ottenuto in simulazione in analoghe condizioni.
• Analizzare e giustificare i risultati ottenuti, osservando che la funzione di trasferimento
del compensatore PD può essere espressa
nella forma:
τd
s
1 + τ0 +
KP
= KP · C (s)
C(s) = KP ·
1 + τ0 · s
ove C (s) è una rete anticipatrice, in cui il parametro m aumenta all’aumentare del rapτd
. Considerare τ0 10−5 s.
porto
τ0 KP
3.3. Controllo con compensatore proporzionale-integrale-derivativo
PID (facoltativo)
Valutare per via sperimentale, con procedimenti analoghi a quelli seguiti nei punti precedenti,
se sia possibile ottenere significativi miglioramenti delle prestazioni con un compensatore PID
per i valori dei parametri KP , τi e τd selezionabili dalle manopole della plancia. N.B.: collegare
anche le boccole 13 e 14 per inserire anche il termine I del controllore.
Si consiglia di partire dalla scelta ritenuta migliore per il compensatore PD e provare a far
variare τi mediante l’apposita manopola. Provare eventualmente in un secondo tempo a far
variare anche KP e τd . Riportare nella relazione solo i grafici relativi alla prova ritenuta più
significativa, commentandone i risultati.
6