MECCANICA DEGLI AZIONAMENTI
Presentazione01: Richiami di Meccanica Applicata
L
Lavoro
i fi it i
infinitesimo
Potenza
Lavoro finito
dL F ds
dL M d
P Fv
P M Ω
sˆ
tˆ
0
0
L F ds F v dt
ˆ
tˆ
0
0
L M d M Ω dt
Richiami di Meccanica Applicata
Principio dei Lavori Virtuali
Un sistema meccanico ideale è in condizioni di equilibrio
se e solo se è nullo il lavoro di tutte le forze attive agenti sul sistema
a seguito di un qualsiasi set di spostamenti virtuali reversibili.
Sistema meccanico ideale = sistema in cui i vincoli non compiono lavoro
Forze attive = forze e coppie che compiono lavoro non-nullo
Spostamenti virtuali = spostamenti ideali e infinitesimi compatibili con i vincoli
Lavoro virtuale = lavoro svolto da una data forza a seguito di spostamenti virtuali
NF
F
j 1
NM
j
s j M j j 0
j 1
P.L.V.
Richiami di Meccanica Applicata
Principio dei Lavori Virtuali
ds j v j dt
d j Ω j dt
La validità del P.L.V. rimane tale se si considerano potenze virtuali e
velocità virtuali al posto di lavori virtuali e spostamenti virtuali.
Nell
Nell’analisi
analisi statica dei meccanismi viene applicato in termini di
“Principio delle Potenze Virtuali”
NF
F
j 1
NM
j
v j M j Ω j 0
j 1
P.P.V.
Richiami di Meccanica Applicata
Principio di D’ALEMBERT (Equazioni Cardinali della Dinamica)
Un corpo rigido si trova in condizioni di equilibrio dinamico
se vengono soddisfatte le seguenti equazioni vettoriali:
nF
F F
in
0
j 1
M
nF
nM
j 1
j 1
M in ,O Pj O F j M j G O Fin M in ,G 0
O
O
Principio dei Lavori Virtuali (per la Dinamica)
NF
F
j 1
j
NM
m 1
j 1
k 1
s j M j j (m a k ) G k M in ,Gk ,k k 0
Richiami di Meccanica Applicata
Equazione dell’Energia
dLm dLr dLp dLin dE
(i termini del primo membro vanno
considerati positivi, ad es. dLr = |dLr |)
dLm ::= lavoro motore
|dLr |:= lavoro resistente (utile)
|dLp |:= lavoro passivo (dissipato o perduto)
1
E (O ( P O)) 2 dm
2m
Lm Lr Lp E
(Equazione dei lavori)
E
1
1
m vG vG J G Ω Ω
2
2
E
Energia
i cinetica
i ti
Moto nel piano xy: ωx = ωy = 0
Corpo rotante attorno a O G (asse z)
1
1
mvG 2 J Gz z2
2
2
1
E ( J Gz m | OG |2 )z2
2
E
Richiami di Meccanica Applicata
Equazione dei lavori:
Lm Lr Lp E
Lm
|Lr |
|Lp |
ΔE
Lm
lavoro motore
lavoro utile
lavoro passivo
variazione dell’energia cinetica
Lp
Regime
E 0 E 0 E 0
Condizione di regime:
- assoluto
- periodico
Macchina
ΔE
t
Lm Lr Lp 0
Lr
ω1 Mm
M
ω2 Mr
T
U
Richiami di Meccanica Applicata
Macchine a 1 g.d.l. con rapporto di trasmissione costante
Richiami di Meccanica Applicata
Macchine a 1 g.d.l. con rapporto di trasmissione variabile
Richiami di Meccanica Applicata
Lm
Macchina
M
hi
ΔE = 0
Lr
Lm Lr Lp 0
Regime
Rendimento
Lp
Perdita di rendimento
Condizioni ideali
(no perdite)
Lmo
Macchina
ΔE = 0
Lr
M m 0 P0
o
Mm P
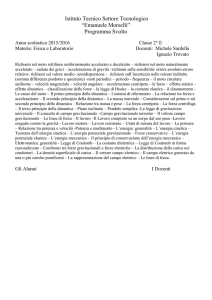
Richiami di Meccanica Applicata
Moto diretto
Lm
Macchina
ΔE = 0
Lr
Lm Lr L p 0
Lr
Lm
Lp
Moto retrogrado
Lr ’
Macchina
ΔE = 0
Lp’
Lm’ = Lr
Lm' Lr' L'p 0 Lr Lr' L'p 0
L 'r L 'r
'
L 'm Lr
Il moto retrogrado è possibile se
'0
Richiami di Meccanica Applicata
dLm dLr dL p dLin dE
1
...
dt
Pm Pr Pp E
Richiami di Meccanica Applicata
Macchina “ridotta”
Pm Pr Pp E
Richiami di Meccanica Applicata
Pm Pr Pp E
Richiami di Meccanica Applicata
(Soluzione: Jeq_tot = 0.0133 kgm2)
Richiami di Meccanica Applicata
GRADO DI IRREGOLARITÀ δ
Φ= rotazione dell’albero nel periodo T
m / T
min
max
m
m
if
1
max min
2
max
2
2
min
2m2
OPERATING MACHINE
δ
Pumps
1/20 ÷ 1/30
Cars engines
1/200 ÷ 1/300
A.C. generators
1/300
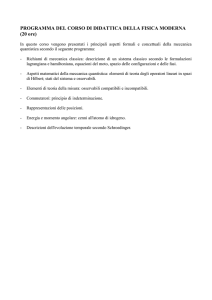
Richiami di Meccanica Applicata
CALCOLO δ E SUA CORREZIONE TRAMITE L
L’IMPIEGO
IMPIEGO DI UN VOLANO
Emax
T
ω2
1
2
2
J tot
t t (max min
i ) k
2
M
2
J tot J m J u
U
ω1
ω2
Jf
k
M
J tot m2
Si supponga che δ sia eccessivo.
eccessivo
Lo si può ridurre ad un valore
Aggiungendo un volano, la cui
inerzia J f ppuò essere così
calcolata:
T
T
U
ω1
k
( J tot J f )m2
k
J f 2 J tot
m