ABB Sace
ABB AC Brushless Servodrives
Convertitori MINIVECTOR 300
Manuale di Installazione e
Messa in Servizio
ABB AC Brushless Servodrives
Convertitori MINIVECTOR 300
Manuale di Installazione e
Messa in Servizio
MANIU11.0410 I
EFFETTIVO: 15.10.2004
SOSTITUISCE: 30.09.2004
© 2003 ABB Sace S.p.A. Tutti i Diritti Riservati.
Istruzioni di Sicurezza
Questo capitolo stabilisce le istruzioni di sicurezza da osservare
durante la configurazione degli azionamenti MINIVECTOR 300.
Introduzione
Il materiale contenuto in questo capitolo ed in questo Manuale deve
essere accuratamente studiato prima di provare o eseguire
qualunque operazione su o con i convertitori.
Attenzione e Note
ATTENZIONE
Questo manuale distingue due tipi di istruzioni di sicurezza.
“ATTENZIONE” è l’equivalente inglese di WARNING ed è usato per
richiamare l’attenzione su situazioni che possono portare a gravi
condizioni di errore, danni fisici e morte. Le note sono usate per
richiamare l’attenzione del lettore o fornire ulteriori informazioni utili
sull’argomento trattato. Le note sono meno critiche dei richiami indicati
con “ATTENZIONE”, ma non dovrebbero essere trascurate.
Il lettore è informato di situazioni che possono provocare gravi danni
fisici e/o gravi danni alle apparecchiature con i seguenti simboli:
ATTENZIONE! Tensione Pericolosa: avverte di
situazioni in cui è presente un livello di tensione che può
provocare danni fisici e/o danni alle apparecchiature. Il
testo accanto al simbolo spiega come evitare il pericolo
di danno.
ATTENZIONE! Pericolo Generico: avverte di situazioni
che possono provocare danni fisici e/o danni alle
apparecchiature ma per cause non elettriche. Il testo
accanto al simbolo spiega come evitare il pericolo.
ATTENZIONE! Scarica Elettrostatica: avverte di
situazioni in cui una scarica elettrostatica può
danneggiare le apparecchiature. Il testo accanto al
simbolo spiega come evitare il pericolo.
Note
Il lettore è richiamato a porre particolare attenzione o esaminare le
ulteriori informazioni disponibili sull’argomento con i seguenti simboli:
AVVERTIMENTO!
Nota.
Corrisponde all’inglese “Caution” ed ha lo scopo
di richiamare l’attenzione su una determinata
questione.
Nota. Fornisce o mette in rilievo ulteriori
informazioni sull’argomento.
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
iii
Istruzioni di Sicurezza
Istruzioni Generali
di Sicurezza
ATTENZIONE! Solo personale qualificato e con
un’adeguata esperienza su azionamenti è autorizzato ad
effettuare le operazioni di installazione e messa in servizio
dei Convertitori MINIVECTOR 300 secondo quanto
prescritto in questo Manuale di Installazione.
ATTENZIONE! Per nessuna ragione alcuna persona
deve accedere alla parte interna del convertitore o ai
terminali del servomotore prima che siano trascorsi
almeno cinque minuti dall'interruzione
dell'alimentazione.
E’ consigliabile verificare sempre (con uno strumento di
misura della tensione) che l’azionamento sia effettivamente
scarico prima di iniziare il lavoro.
Tensioni potenzialmente letali possono essere presenti sul
circuito intermedio c.c., sui circuiti associati e sui morsetti di
alimentazione del motore anche quando l’alimentazione
principale del convertitore è spenta.
Osservare particolare attenzione nell’utilizzo del dispositivo.
Trascurare queste indicazioni può provocare danni fisici e
morte.
ATTENZIONE! L’installazione deve essere effettuata in
conformità alle Direttive Europee CEE 89/336 e CEE 72/23.
ATTENZIONE! Il costruttore della macchina che installa il
convertitore deve prevedere e realizzare apposite funzioni
di protezione aggiuntive per evitare danni alle persone e
alle apparecchiature durante il servizio della macchina.
Altri “Attenzione” e “Nota.” Sono riportati lungo il testo.
iv
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Sommario
Istruzioni di Sicurezza .......................................................................... iii
Introduzione ..........................................................................................
Attenzione e Note ..................................................................................
ATTENZIONE ......................................................................................
Note...................................................................................................
Istruzioni Generali di Sicurezza ...............................................................
iii
iii
iii
iii
iv
Sommario .............................................................................................. v
Capitolo 1 - Informazioni Generali ...................................................... 1-1
Introduzione ........................................................................................ 1-1
Prima di cominciare ............................................................................. 1-1
Contenuto di questa Guida ................................................................... 1-1
Informazioni Generali su MINIVECTOR 300 ............................................ 1-2
Software Applicativo di Interfaccia Utente ............................................ 1-2
Identificazione del Prodotto ................................................................ 1-2
Componenti di Completamento ........................................................... 1-2
Capitolo 2 - Specifiche Tecniche......................................................... 2-1
Introduzione ........................................................................................ 2-1
Caratteristiche Tecniche ....................................................................... 2-1
Scheda di Controllo ........................................................................... 2-1
Stadi di Potenza ................................................................................ 2-1
Versione Monofase ............................................................................ 2-1
Alimentazione Principale ................................................................. 2-1
Alimentazione Ausiliaria .................................................................. 2-1
Correnti di Uscita ............................................................................ 2-2
Versione Trifase ................................................................................ 2-2
Alimentazione Principale ................................................................. 2-2
Alimentazione Ausiliaria .................................................................. 2-2
Correnti di Uscita ............................................................................ 2-2
Circuito di Frenatura .......................................................................... 2-2
Freno elettromagnetico ...................................................................... 2-3
Frenatura Dinamica ........................................................................... 2-3
Interfaccia Resolver .......................................................................... 2-3
Uscita Emulazione Encoder ................................................................ 2-3
Segnali di Ingresso/Uscita .................................................................. 2-3
Dati Tecnici ......................................................................................... 2-4
Caratteristiche Elettriche ................................................................... 2-4
Versione Monofase ......................................................................... 2-4
Versione Trifase ............................................................................. 2-4
Caratteristiche Meccaniche ................................................................ 2-4
Temperature Operative ...................................................................... 2-4
Abbinamenti Motore ............................................................................. 2-5
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
v
Sommario
Capitolo 3 - Installazione Meccanica ................................................... 3-1
Introduzione ........................................................................................ 3-1
Installazione Meccanica ........................................................................ 3-1
Capitolo 4 - Installazione Elettrica ...................................................... 4-1
Introduzione ........................................................................................ 4-1
Versione Monofase ............................................................................... 4-1
Descrizione dei connettori disponibili .................................................. 4-1
Schema Connessioni .......................................................................... 4-2
Connessioni di Potenza ...................................................................... 4-3
Connessioni Alimentazione Principale ............................................... 4-3
Connessioni del Resistore di Frenatura ............................................. 4-3
Alimentazione diretta da rete TN a 400Vac ........................................ 4-4
Alimentazione con Autotrasformatore da rete TT a 400Vac .................. 4-4
Alimentazione diretta da rete TT a 230Vac ........................................ 4-5
Alimentazione con Trasformatore da rete IT a 400Vac ........................ 4-5
Connessioni Alimentazione Ausiliaria .................................................. 4-6
Versione Trifase .................................................................................. 4-7
Descrizione dei connettori disponibili .................................................. 4-7
Schema Connessioni .......................................................................... 4-8
Connessioni di Potenza ...................................................................... 4-9
Connessioni Alimentazione Principale ............................................... 4-9
Connessioni del Resistore di Frenatura ............................................. 4-9
Alimentazione con Autotrasformatore da rete TT a 400 Vac ............... 4-10
Alimentazione con Trasformatore da rete IT a 400 Vac ..................... 4-10
Connessioni Alimentazione Ausiliaria ................................................ 4-11
Connessioni Motore ............................................................................ 4-12
Connessioni Freno ............................................................................. 4-13
Connessioni Resolver ......................................................................... 4-13
Cavo Collegamento Resolver ............................................................ 4-14
Connessioni di Controllo ..................................................................... 4-15
Emulazione Encoder ........................................................................... 4-16
Cavo Emulazione Encoder ................................................................ 4-16
Connessione Seriale .......................................................................... 4-17
Cavo Collegamento Seriale RS232 .................................................... 4-17
Cavo Collegamento Seriale RS485 .................................................... 4-18
Sezioni Conduttori.............................................................................. 4-18
Capitolo 5 - Messa in Servizio ............................................................. 5-1
Introduzione ........................................................................................ 5-1
Per Cominciare .................................................................................... 5-1
Il Browser MiniVector Interface .............................................................. 5-2
Browser Offline ................................................................................. 5-2
Browser Online .................................................................................. 5-2
Startup Assistant ............................................................................... 5-4
Block Analyzer .................................................................................. 5-5
Command Generator .......................................................................... 5-5
Current Regulator .............................................................................. 5-6
Resolver Converter ............................................................................ 5-6
Power Drive ...................................................................................... 5-7
Waveform Generator .......................................................................... 5-8
Impostazione dei Parametri ................................................................... 5-9
vi
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Sommario
Funzioni di Limitazione ...................................................................... 5-9
Selezione del Modo Operativo .......................................................... 5-10
Current mode ............................................................................... 5-10
Speed mode ................................................................................. 5-10
Condizionamento del Riferimento Esterno .......................................... 5-10
Taratura dell’Anello di Velocità ......................................................... 5-11
Taratura dell’Anello di Corrente ........................................................ 5-11
Risoluzione dell’Emulazione Encoder ................................................ 5-11
Autophasing ...................................................................................... 5-12
Frenatura Dinamica ............................................................................ 5-13
Salvataggio Parametri ........................................................................ 5-13
Aggiornamento Firmware .................................................................... 5-14
Gestione delle Emergenze .................................................................. 5-14
Stati del Convertitore ....................................................................... 5-14
Funzioni Arresto di Emergenza ......................................................... 5-14
Reset dei Fault ............................................................................... 5-15
Capitolo 6 - Normativa EMC ................................................................ 6-1
Introduzione ........................................................................................ 6-1
Premessa ............................................................................................ 6-1
Normativa di Riferimento ...................................................................... 6-1
Definizioni ........................................................................................... 6-2
Distribuzione Ristretta ....................................................................... 6-2
Primo Ambiente ................................................................................. 6-2
Secondo Ambiente ............................................................................ 6-2
Installazione in Primo Ambiente ............................................................ 6-2
Conformità ........................................................................................ 6-3
Installazione in Secondo Ambiente ........................................................ 6-4
Conformità ........................................................................................ 6-4
Appendice A - Codici di Errore ........................................................... A-1
Introduzione ........................................................................................ A-1
Fault e Warning ................................................................................... A-1
Warning ........................................................................................... A-1
Fault ................................................................................................ A-2
Appendice B - Condizioni Ambientali .................................................. B-1
Condizioni Operative ............................................................................ B-1
Condizioni di Immagazzinamento ........................................................... B-1
Condizioni di Trasporto ........................................................................ B-2
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
vii
Sommario
Questa pagina è stata lasciata volutamente bianca.
viii
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Capitolo 1 - Informazioni Generali
Introduzione
Questo documento è il Manuale di Installazione e Messa in Servizio
per Servoazionamenti MINIVECTOR 300.
Prima di cominciare
Il lettore deve possedere un’adeguata conoscenza dei fondamenti di
elettrotecnica, delle attività di cablaggio elettrico, di azionamenti e
dell’uso del pannello di controllo dell’azionamento.
Contenuto di questa
Guida
In questo Manuale vengono descritte l’installazione e la messa in
servizio dei Servoazionamenti MINIVECTOR 300.
Le Istruzioni di Sicurezza riportate nelle prime pagine di questo
Manuale, descrivono i vari tipi di avvertimenti e simboli usati
all’interno del Manuale. Questo capitolo stabilisce inoltre le istruzioni
di sicurezza da applicare durante il funzionamento operativo dei
Convertitori MINIVECTOR 300.
Capitolo 1 - Informazioni Generali descrive brevemente il contenuto di
questo stesso Manuale e le informazioni generali riguardanti i
Servoazionamenti MINIVECTOR 300.
Capitolo 2 - Specifiche Tecniche contiene le caratteristiche tecniche e
i dati nominali dei Convertitori MINIVECTOR 300.
Capitolo 3 - Installazione Meccanica contiene le istruzioni per
l’installazione meccanica dei Convertitori MINIVECTOR 300
Capitolo 4 - Installazione Elettrica contiene le istruzioni per
l’installazione elettrica e meccanica, le connessioni ed i requisiti di
aerazione dei Convertitori MINIVECTOR 300.
Capitolo 5 - Messa in Servizio illustra il programma software di
configurazione dei Servoazionamenti MINIVECTOR 300.
Capitolo 6 - Norme EMC introduce le linee guida ed i requisiti EMC
dei Servoazionamenti MINIVECTOR 300.
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
1-1
Capitolo 1 - Informazioni Generali
Informazioni Generali
su MINIVECTOR 300
MINIVECTOR 300 è un convertitore digitale per servomotori
brushless al tempo stesso semplice e versatile. Semplice perché è
facile da installare, da configurare, in una parola: da usare. Versatile
perché si adatta con rapidità alle più svariate applicazioni di
movimentazione nelle quali sia richiesto il controllo della corrente o
della velocità. Inoltre, l’automatizzazione di molte procedure di
taratura accorcia sensibilmente la fase di messa in servizio e
garantisce prestazioni uniformi nel corso del tempo. Le principali
caratteristiche di MINIVECTOR 300 sono:
•
Controllo digitale di corrente realizzato con la tecnica dei
vettori di spazio e aggiornato con una frequenza di 20 kHz
•
Anello digitale di velocità con ingresso analogico
differenziale ± 10 V e compensatore proporzionale-integrale
•
Interfaccia resolver con emulazione encoder fino a 1024
impulsi/giro
•
Ricerca automatica del numero di poli del motore e
dell’angolo tra motore e resolver.
Il MINIVECTOR 300 può essere fornito in due configurazioni base,
1.
con alimentazione monofase
2.
oppure con alimentazione trifase.
Software Applicativo di
Interfaccia Utente
I Convertitori MINIVECTOR 300 sono forniti unitamente ad un
programma software, Miv32, per la configurazione con l’uso del PC.
Questo programma di interfaccia utente consente la configurazione e
il monitoraggio dell’azionamento in tempo reale.
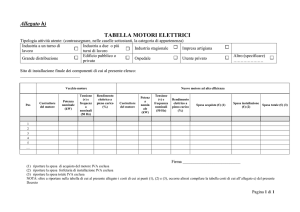
Identificazione del
Prodotto
Su un lato del convertitore è applicata l’etichetta mostrata in figura.
Quando contattate il servizio assistenza, vi sarà richiesto di fornire le
informazioni di Part Number e Serial Number riportate nei singoli
campi.
Componenti di
Completamento
Esistono due taglie di potenza di MINIVECTOR 300di regola abbinate
con servomotori ABB della SERIE 8C e 8N, anche se possono
essere pilotati anche servomotori di altri costruttori. Per maggiori
informazioni riguardo gli abbinamenti motore, l'impiego di altri
componenti di completamento e apparecchiature ausiliarie consultare
il Capitolo.
1-2
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Capitolo 2 - Specifiche Tecniche
Introduzione
Le principali caratteristiche tecniche dei Convertitori MINIVECTOR
300 sono elencate nei paragrafi seguenti.
Caratteristiche
Tecniche
Scheda di Controllo
Stadi di Potenza
L’unità di controllo è basata su un’architettura multiprocessore che
comprende:
•
un DSP veloce a 16 bit che esegue tutti i task di controllo
digitale (acquisizione dei sensori di corrente e posizione,
condizionamento del riferimento esterno, regolazione di
velocità e/o corrente e generazione dei segnali PWM) e
gestisce le condizioni di emergenza e di guasto
•
un microcontrollore a 16 bit dedicato alla configurazione e al
monitoraggio dell’azionamento, nonché alla supervisione della
funzionalità del DSP.
Lo stadio di potenza è realizzato con interruttori IGBT completamente
protetti e integra un alimentatore switching per l’elettronica di
controllo.
Ponte di raddrizzamento interno, fusibile e limitatore della corrente
di inserzione integrati.
La massa di potenza e la massa di segnale sono elettricamente
isolate.
Versione Monofase
Alimentazione Principale
Connessione diretta alla rete, alimentazione monofase 110 Vac –
20% ÷ 230 Vac ± 10%, 50-60 Hz.
Picco di corrente di inserzione: 130 Arms simmetrici (per 3,5 ms).
Alimentazione Ausiliaria
L’alimentazione ausiliaria consente di mantenere attivi l’indicatore a
LED e l’emulazione encoder anche dopo aver rimosso l’alimentazione
principale. Quando è presente l’alimentazione principale,
l’alimentatore switching interno preleva corrente direttamente dal bus
DC e l’alimentazione ausiliaria non è più necessaria.
L’alimentazione ausiliaria è invece indispensabile quando la
sequenza delle alimentazioni del sistema su cui è installato
l’azionamento prevede che la potenza venga erogata solo se il
convertitore è attivo e non segnala condizioni di guasto.
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
2-1
Capitolo 2 - Specifiche Tecniche
Correnti di Uscita
Le correnti di uscita variano in base alla taglia del convertitore.
La corrente massima può essere erogata per non più di due
secondi. Trascorso questo tempo interviene la protezione di Ixt che
limita automaticamente la corrente di uscita al valore della corrente
continuativa nominale.
Le taglie disponibili sono (corrente “continuativa / massima” in Arms):
•
3/6
•
5 / 10
Versione Trifase
Alimentazione Principale
Alimentazione trifase 230 Vac +10 / -20 %, 50-60 Hz. Possibilità di
connessione diretta da rete tramite autotrasformatore.
Picco di corrente di inserzione: 130 Arms simmetrici (per 3,5 ms).
Alimentazione Ausiliaria
Correnti di Uscita
L’alimentazione ausiliaria a 24 Vdc è necessaria per il funzionamento
della logica di controllo dell’azionamento.
Le correnti di uscita variano in base alla taglia del convertitore.
La corrente massima può essere erogata per non più di due
secondi. Trascorso questo tempo interviene la protezione di Ixt che
limita automaticamente la corrente di uscita al valore della corrente
continuativa nominale.
Le taglie disponibili sono (corrente “continuativa / massima” in Arms):
Circuito di Frenatura
•
3/6
•
5 / 10
•
7 / 14
Il resistore di frenatura è montato internamente per tutte le taglie.
Comunque, quando la potenza dissipata sul resistore interno eccede
la potenza nominale, è richiesto un resistore esterno (contattare il
Servizio di Assistenza Tecnica).
Il resistore interno è protetto contro i corto-circuiti; inoltre, un circuito
di Ixt limita la potenza media al valore indicato nella tabella
sottostante.
2-2
Resistore Interno
Unità di Misura
Taglia 3/6
Taglia 5/10
Taglia 7/14
Resistenza
Potenza Nominale
Potenza di picco
Tp (picco)
Tp (o)
Ω
W
W
ms
s
56
110
2800
400
1,8
33
110
2800
400
1,8
15
220
2800
400
1,8
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Capitolo 2 - Specifiche Tecniche
Freno elettromagnetico
Frenatura Dinamica
Opzionale: un freno elettromagnetico può essere connesso al
terminale X3.
•
Ingresso di alimentazione freno: 24 Vdc, 2 A max
•
Alimentazione interna freno: 24 Vdc, 0,8 Amax
•
Il blocco e il rilascio del freno sono gestiti automaticamente
dal convertitore; alimentando a +24V l’ingresso BRK
UNLOCK (pin 9 del connettore X5), il freno viene rilasciato.
Il convertitore è in grado di frenare il motore corto-circuitandone i
morsetti e controllando la corrente che vi fluisce ad un livello
predefinito.
La frenatura dinamica si attiva automaticamente al verificarsi di un
guasto o quando il convertitore viene disabilitato; può essere esclusa
alimentando a +24V l’ingresso BRK UNLOCK (pin 9 del connettore
X5).
Interfaccia Resolver
Uscita Emulazione
Encoder
Segnali di
Ingresso/Uscita
•
Rapporto tra riferimento e segnali seno / coseno: 2:1;
•
Frequenza di riferimento: 10 kHz;
•
Regolazione automatica dell’ampiezza dei segnali seno e
coseno;
•
Compensazione automatica dello sfasamento tra il riferimento
e i segnali seno e coseno;
•
Autofasatura del resolver rispetto al piano magnetico del
motore.
•
Uscita differenziale RS422.
•
Programmabile da 128 fino a 1024 impulsi per giro.
•
Massima frequenza di uscita: 125 kHz.
•
Due ingressi analogici differenziali ±10 V, con conversione
digitale a 12 bit.
•
Due ingressi digitali optoisolati 0-24 V: ENABLE e BRK
UNLOCK.
•
Un’uscita digitale di fault (contatto libero di relè).
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
2-3
Capitolo 2 - Specifiche Tecniche
Dati Tecnici
Le specifiche elettriche e meccaniche, le temperature di
funzionamento e gli abbinamenti motore sono elencate nelle tabelle
seguenti.
Caratteristiche
Elettriche
Versione Monofase
Grandezze elettriche
Unità
Taglia 3/6
Taglia 5/10
Tensione di alimentazione nominale
Tensione di alimentazione ausiliaria
Tensione massima di uscita
Corrente nominale di ingresso
Corrente nominale di uscita
Corrente massima di uscita
Potenza nominale di uscita
Frequenza di commutazione PWM
Vrms
Vrms
Vrms
Arms
Arms
Arms
kVA
kHz
Grandezze elettriche
Unità
Tensione di alimentazione nominale
Tensione di alimentazione ausiliaria
Tensione massima di uscita
Corrente nominale di ingresso
Corrente nominale di uscita
Corrente massima di uscita
Potenza nominale di uscita
Frequenza di commutazione PWM
Vrms
Vrms
Vrms
Arms
Arms
Arms
kVA
kHz
Grandezze meccaniche
Unità
Taglia 3/6
Taglia 5/10
Taglia 7/14
Altezza
Profondità
Larghezza
Peso
mm
mm
mm
kg
206
173
70
1,7
206
193
80
2
226
194
80
2
110 ÷ 230 Vac +10 / -20%, 50/60 Hz
110 ÷ 230 Vac +10 / -20%, 50/60 Hz, 30 VA max
220 Vac
4,8
8,2
3
5
6
10
1
1,7
10
Versione Trifase
Taglia 3/6
Taglia 5/10
Taglia 7/14
110 ÷ 230 Vac +10 / -20%, 50/60 Hz
110 ÷ 230 Vac +10 / -20%, 50/60 Hz, 30 VA max
220 Vac
2,8
4,75
6,7
3
5
7
6
10
14
1
1,7
2,4
10
Caratteristiche
Meccaniche
Temperature Operative
Durante il funzionamento a corrente nominale l’intervallo di
temperatura ambiente ammesso è 0 °C ÷ 40 °C.
Nell’intervallo di temperatura 40 °C ÷ 60 °C occorre applicare un
declassamento del 2,5%/°C.
Temperatura di immagazzinamento: -10 °C ÷ 70 °C.
2-4
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Capitolo 2 - Specifiche Tecniche
Abbinamenti Motore
I seguenti abbinamenti tra servomotore e convertitore sono stati scelti
per un impiego di carattere generale e ottimizzando le prestazioni
complessive dell’azionamento. Per applicazioni particolari contattare
il Servizio Clienti.
Servomotore
Tipo
SERIE SDM
SDM 251…0N3-55
SDM 251…0N5-55
SDM 251…1N0-55
SERIE 8N
8NB.2.40… ..E
8N0.1.40… ..E
8N0.2.40… ..E
SERIE 8C
8C1.1.30... ..E
8C1.1.60... ..E
8C1.2.30... ..E
8C1.2.60... ..E
8C1.3.30... ..E
8C1.4.30... ..E
8C4.0.15... ..E
8C4.0.30... ..E
8C4.1.15... ..E
8C4.2.15... ..E
MINIVECTOR Coppia
300
allo stallo
Taglia
velocità 0
M0
[Nm]
Coppia di
picco
velocità 0
Mmax
[Nm]
Coppia nominale Velocità
alla velocità
nominale
nominale
Mn
nN
[Nm]
[rpm]
03/06
03/06
03/06
0.34
0.5
0,94 *
1.3
1,7
1,8
0.32
0.48
0.71
6000
6000
6000
03/06
03/06
03/06
0,36
0,53
0,95
1
1,5
2,7
0,34
0,47
0,84
4000
4000
4000
03/06
03/06
03/06
05/10
05/10
05/10
03/06
05/10
05/10
05/10
1,3
1,2
2,5
2,5
3,6
4,5
3,9
3,9
7,3
9,6
3,4
2,2
4,4
4,5
8,2
8,2
7,2
7,4
15,1
18,2
4,3
3,6
7,4
5,0
8,2
9,1
12,0
8,2
16,8
17,5
3000
6000
3000
6000
3000
3000
1500
3000
1500
1500
* La coppia nominale del motore (1 Nm) è limitata dalla corrente continuativa del convertitore.
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
2-5
Capitolo 2 - Specifiche Tecniche
Questa pagina è stata lasciata volutamente bianca.
2-6
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Capitolo 3 - Installazione Meccanica
Introduzione
Questo Capitolo fornisce le istruzioni per l’installazione meccanica, il
cablaggio ed i requisiti di raffreddamento dei convertitori Minivector
300, versione monofase e trifase.
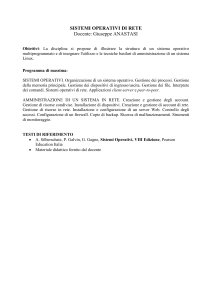
Installazione
Meccanica
Per installare MINIVECTOR 300 sono sufficienti le staffe e le viti
fornite assieme al convertitore
k
=
g
Fissare tramite due viti la staffa inferiore sul pannello
prescelto per l’installazione
•
Posizionare il convertitore sulla staffa inferiore
•
Posizionare e fissare tramite una vite la staffa superiore.
k2
k1
c
•
e1
=
=
=
=
=
MINIVECTOR 300
LD
X1
X4
b1
X5
d
b
d
X6
X2
X7
X3
CAUTION !
X8
=
=
Fori M4
e
m
c
c1
c2
Lasciare spazio sufficiente per il passaggio dei collegamenti
c1
a
MINIVECTOR 300
Taglia 3/6
Taglia 5/10
unità
[mm]
[mm]
a
70
70
b
252
252
b1
206
206
c
16,5
16,5
c1
39,5
39,5
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
c2
14
14
d
+1
238 -0
+1
238 -0
e
170
170
e1
174
174
g
5,5
5,5
k
4,5
4,5
k1
63,5
63,5
k2
2
2
m
∅5,5
∅5,5
3-1
Capitolo 3 - Installazione Meccanica
k
k1
=
g
e1
=
=
=
=
MINIVECTOR 300
LD
X1
X4
b1
d
X5
b
d
X6
X2
X7
X3
CAUTION !
X8
=
=
Fori M4
e
m
c
c1
c2
Lasciare spazio sufficiente per il passaggio dei collegamenti
c1
a
MINIVECTOR 300
Taglia 7/14
3-2
unità
[mm]
a
80
b
268
b1
206
c
24
c1
39,5
c2
14
d
+1
254 -0
e
190
e1
194
g
5,5
k
12
k1
63,5
m
∅5,5
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
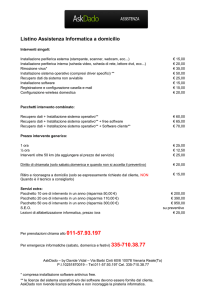
Capitolo 3 - Installazione Meccanica
100 mm
100 mm
Nel caso di sistemi multi-asse, i convertitori devono essere installati
rispettando le distanze indicate nella figura sottostante. Queste
distanze sono necessarie per garantire un’adeguata aerazione dei
convertitori. Non sono necessari sistemi addizionali di ventilazione
forzata.
n = min. 20 mm
p = min. 90 mm
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
3-3
Capitolo 3 - Installazione Meccanica
Questa pagina è stata lasciata volutamente bianca.
3-4
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Capitolo 4 - Installazione Elettrica
Introduzione
Di seguito vengono illustrati i terminali del MINIVECTOR 300 e le
istruzioni di cablaggio.
Le versioni monofase e trifase del MINIVECTOR 300 presentano
differenti terminali di alimentazione principale (X1) ed ausiliaria (X2).
Hanno in comune i terminali
•
X3 della scheda opzionale freno,
•
X4 dei segnali motore,
•
X5 degli I/O digitali,
•
X6 dell’interfaccia di emulazione encoder,
•
X7 e X8 per la connessione seriale RS232.
Versione Monofase
Descrizione dei
connettori disponibili
MINIVECTOR 300
LD
X1
X4
Connettore di potenza
Alimentazione aux.
Connettore opzionale
X5
X6
X2
X3
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Segnali motore
I/O
Emulazione Enc.
X7
CAUT ION !
TER M IN AL VO LT AG E
IS PR ES EN T U P T O 2
MINU T E S AF T ER
SW ITCH ING O FF !
LED di stato
X8
X7-X8 RS232
4-1
Capitolo 4 - Installazione Elettrica
Schema Connessioni
Ω
4-2
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Capitolo 4 - Installazione Elettrica
Connessioni di Potenza
Connessioni
Alimentazione Principale
Il connettore X1 è dedicato al collegamento dell’alimentazione di
potenza, del motore e del resistore di frenatura.
Pin
Riferimento
1
VR
Alimentazione principale monofase (230VAC)
2
VN
Alimentazione principale monofase (neutro)
3
U
Fase motore 1
4
V
Fase motore 2
5
W
6
+VBUS
7
RCL
8
RCL EXT
9
-VBUS
Descrizione
Fase motore 3
Terminale positivo DC bus
Resistore di frenatura interno
Resistore di frenatura interno/esterno
Terminale negativo DC bus
Connettere i terminali L1 e L2 secondo le indicazioni degli schemi
elettrici specifici per ciascun tipo di rete di alimentazione.
E’ ammessa la connessione a sistemi di alimentazione di tipo TN e
TT.
La connessione diretta a sistemi di alimentazione tipo IT è
consentita solo a condizione che la tensione tra le fasi e la terra non
superino in nessuna condizione la tensione di 253Vac (230Vac +
10%)
Poiché è difficile verificare il superamento dei limiti in
regime transitorio, questo tipo di connessione è
sconsigliata.
In presenza di tali sistemi IT di alimentazione occorrerà pertanto
utilizzare un trasformatore.
Collegare il conduttore di terra ad uno dei due terminali a vite PE
posti sul pannello frontale.
Connessioni del
Resistore di Frenatura
•
Nel caso di resistore interno ponticellare i terminali 7 e 8.
•
Nel caso di resistore esterno, collegare il resistore tra i
terminali 6 e 8.
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
4-3
Capitolo 4 - Installazione Elettrica
Alimentazione diretta da
rete TN a 400Vac
Alimentazione con
Autotrasformatore da rete
TT a 400Vac
4-4
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Capitolo 4 - Installazione Elettrica
Alimentazione diretta da
rete TT a 230Vac
Alimentazione con
Trasformatore da rete IT
a 400Vac
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
4-5
Capitolo 4 - Installazione Elettrica
Connessioni
Alimentazione Ausiliaria
L’alimentazione ausiliaria L1C - L2C (Terminale X2) è necessaria
solo quando si desiderino mantenere vive le informazioni di stato e di
emulazione encoder in assenza dell’alimentazione principale L1 e L2.
LC1 - LC2 ingresso alimentazione ausiliaria 110/230Vac
± 10% - 10VA max
4-6
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Capitolo 4 - Installazione Elettrica
Versione Trifase
Descrizione dei
connettori disponibili
MINIVECTOR 300
LED di stato
LD
X1
X4
Connettore di potenza
Alimentazione aux.
Connettore opzionale
X5
X6
X2
X3
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
I/O
Emulazione Enc.
X7
CAUT ION !
TER M IN AL VO LT AG E
IS PR ES EN T U P T O 2
MINU T E S AF T ER
SW ITCH ING O FF !
Segnali motore
X8
X7-X8 RS232
4-7
Capitolo 4 - Installazione Elettrica
Schema Connessioni
Ω
4-8
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Capitolo 4 - Installazione Elettrica
Connessioni di Potenza
Il connettore X1 è dedicato al collegamento dell’alimentazione di
potenza, del motore e del resistore di frenatura.
10
Connessioni
Alimentazione Principale
Pin
Riferimento
Descrizione
1
R
Alimentazione principale trifase (230 VAC)
2
S
Alimentazione principale trifase (230 VAC)
3
T
Alimentazione principale trifase (230 VAC)
4
U
Fase motore 1
5
V
Fase motore 2
6
W
Fase motore 3
7
+VBUS
8
RCL
9
RCL EXT
10
-VBUS
Terminale positivo DC bus
Resistore di frenatura interno
Resistore di frenatura interno/esterno
Terminale negativo DC bus
Connettere i terminali R, S e T secondo le indicazioni degli schemi
elettrici specifici per ciascun tipo di rete di alimentazione.
E’ ammessa la connessione a sistemi di alimentazione di tipo TT.
La connessione diretta a sistemi di alimentazione tipo IT è
consentita solo a condizione che la tensione tra le fasi e la terra non
superino in nessuna condizione la tensione di 253Vac (230Vac +
10%).
Poiché è difficile verificare il superamento dei limiti
in regime transitorio, questo tipo di connessione è
sconsigliata.
In presenza di tali sistemi di alimentazione occorrerà pertanto
utilizzare un trasformatore collegato secondo le indicazioni riportate
in Alimentazione con Trasformatore da rete IT a 400 Vac.
Collegare il conduttore di terra ad uno dei due terminali a vite PE
posti sul pannello frontale.
Connessioni del
Resistore di Frenatura
•
Nel caso di resistore interno ponticellare i terminali 8 e 9.
•
Nel caso di resistore esterno, collegare il resistore tra i
terminali 7 e 9.
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
4-9
Capitolo 4 - Installazione Elettrica
Alimentazione con
Autotrasformatore da rete
TT a 400 Vac
Alimentazione con
Trasformatore da rete IT
a 400 Vac
4-10
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Capitolo 4 - Installazione Elettrica
Connessioni
Alimentazione Ausiliaria
L’alimentazione ausiliaria deve essere derivata da un alimentatore
DC a 24 V ± 15%, 1,5 A max.
24 Vdc ± 15%, 30 VA max.
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
4-11
Capitolo 4 - Installazione Elettrica
Connessioni Motore
Collegare i cavi del motore ai terminali U, V, W, PE rispettando le
indicazioni dei poli.
Collegare il cavo di terra ad uno dei due terminali a vite PE posti sul
pannello frontale.
Connessioni di potenza
Lato motore SDM
Pin
1
2
3
4
A
B
Connessioni SDM
U
Massa
W
V
+ Freno (opzionale)
- Freno (opzionale)
Connessioni di potenza
Lato motore 8C e 8N
Connessioni 8C1
V
Massa
U
W
+ Freno (opzionale)
- Freno (opzionale)
Connessioni 8N
U
Massa
W
V
+ Freno (opzionale)
- Freno (opzionale)
Scatola connessioni di potenza servomotori 8C4:
Ground wire
connected on the pin
3 of signal connector
A
D
B
E
Connessioni freno su motore 8C
4-12
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Capitolo 4 - Installazione Elettrica
Connessioni Freno
Il collegamento del connettore X3 è opzionale. Esso può essere
usato con motori dotati di freno elettromagnetico di stazionamento.
Pin
Reference
Description
1
24VOUT
Uscita freno 24V (24Vdc, 0.8A max)
2
24BRIN
Ingresso freno 24V (24Vdc, 2A max)
3
B+
Alimentazione positiva freno
4
B-
Alimentazione negativa freno
L’azionamento si disabilita automaticamente e rilascia il freno
elettromeccanico quando si apre la connessione tra i pin 1 e 2.
Connettere tra i pin 1 e 2 il contatto di emergenza libero da tensione
o connettere con un ponticello.
Qualora il freno di stazionamento richiede una corrente superiore a
0.8A, è necessario fornire un’alimentazione esterna a 24Vdc sino ad
una corrente massima di 2A tra i morsetti B- (4) e 24BRIN (2).
Connessioni Resolver
Il connettore X4 è utilizzato per interfacciare il trasduttore resolver.
X4
1
6
9
5
Pin
Riferimento
Descrizione
1
THERMAL2
Protezione termica motore (2)*
2
N.C.
3
+REFRES
Riferimento + resolver
4
SIN HIGH
Segnale + seno resolver
5
COS HIGH
Segnale + coseno resolver
6
THERMAL1
Protezione termica motore (1)*
7
-REFRES
Riferimento - resolver
8
SIN LOW
Segnale - seno resolver
9
COS LOW
Segnale - coseno resolver
Non connesso
* Connettere tra questi due pin i contatti termostatici liberi (normalmente
chiusi) o il resistore PTC
Vista frontale del connettore di segnale dei motori SERIE 8C, 8N e
SDM, a sinistra, e dei motori 8C4, a destra.
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
4-13
Capitolo 4 - Installazione Elettrica
Cavo Collegamento
Resolver
4-14
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Capitolo 4 - Installazione Elettrica
Connessioni di
Controllo
VREF1+/VREF1
riferimento analogico di ingresso (±10V - 25KΩ
differenziale): utilizzato per controllare la
velocità del motore quando il convertitore è
configurato in Speed Mode o la corrente del
motore quando il convertitore è configurato in
Current Mode.
VREF2+/VREF2
riferimento analogico di ingresso (±10V 25KΩ differenziale); può essere usato per
limitare dinamicamente la corrente massima
verso il motore. Riferimento 0V = 100% di
corrente, riferimento 10V= 0% di corrente.
ENABLE
ingresso digitale (15÷24V, 20 mA):
abilita/disabilita lo stadio di potenza del
convertitore. Tale funzione, inoltre, sblocca il
freno di stazionamento ogniqualvolta venga
abilitata.
BRK-UNLOCK
ingresso digitale (15÷24V, 20mA): Tale
funzione, nei modelli previsti con l'opzione
comando freno, permette di eccitare il freno
anche quando il convertitore è in stato di
FAULT. Disabilita inoltre la frenatura
dinamica.
FAULT1/FAULT2
contatto di relè; è normalmente chiuso quando
il convertitore si trova nello stato di Running. Il
contatto è aperto quando il convertitore si trova
nello stato di Stop e sono presenti delle
condizioni di fault.
Pin
Riferimento
1
VREF1+
Descrizione
Ingresso + del riferimento di velocità (corrente)
2
VREF1-
Ingresso - del riferimento di velocità (corrente)
3
VREF2+
Ingresso + limitazione dinamica corrente
4
VREF2-
Ingresso - limitazione dinamica corrente
5
ANGND
Massa analogica
6
+15VOUT
7
-15VOUT
Uscita tensione ausiliaria (50mA max.)
8
ENABLE
Ingresso abilitazione potenza
9
BRK UNLOCK
10
GNDCMD
11
FAULT1
Segnale fault ingresso (contatto relè)
12
FAULT2
Segnale fault uscita (contatto relè)
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Uscita tensione ausiliaria (50mA max.)
Ingresso rilascio freni
Massa ENABLE e BRK UNLOCK
4-15
Capitolo 4 - Installazione Elettrica
Emulazione Encoder
Il connettore X6 deve essere utilizzato per il feedback della posizione
del motore quando il convertitore è pilotato da un’unità di controllo
esterna (PLC, controllo numerico).
X6
1
6
9
5
Pin
Riferimento
Descrizione
1
ENCA+
signale encoder RS422
2
ENCB+
signale encoder RS422
3
ENCZ+
signale encoder RS422
4
N.C.
5
SHIELD
Schermo
6
ENCA-
signale encoder RS422
7
ENCB-
signale encoder RS422
8
ENCZ-
signale encoder RS422
9
GND
Non connesso
Massa
Cavo Emulazione
Encoder
4-16
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Capitolo 4 - Installazione Elettrica
Connessione Seriale
Cavo Collegamento
Seriale RS232
I connettori X7 e X8 sono utilizzati per connettere il convertitore ad un
PC su linea seriale. I due connettori presentano gli stessi segnali
elettrici; perciò, nel caso di collegamento di più convertitori su bus
RS485, si può utilizzare il connettore X7 come ingresso e il
connettore X8 come uscita (o vice versa).
Pin
Riferimento
Descrizione
1
RS232-RX
Rs232 receive
2
RS232-TX
Rs232 transmit
3
N.C.
Non connesso
4
RS485 D-
Rs485 tx/rx -
5
RS485 D+
Rs485 tx/rx +
6
RS232 GND
Rs232 ground
7
RS485 GND
Rs485 ground
8
N.C.
Non connesso
•
Lunghezza massima del cavo: 10 metri
•
Capacità massima: 2500 pF
•
Cavo schermato
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
4-17
Capitolo 4 - Installazione Elettrica
Cavo Collegamento
Seriale RS485
•
Lunghezza massima cavo: 100 metri
•
Capacità massima: 100 pF/m
•
Impedenza: 120 ohm tipico.
Sezioni Conduttori
Funzione
Cavo resistore di frenatura
Cavo motore
Cavo alimentazione principale
Cavi freno, alimentazione freno e ausiliaria
Cavo resolver
Cavi segnali di controlli
4-18
Connettore Taglia 3/6 Taglia 5/10 Taglia 7/14
X1
X1
X1
X2, X3
X4
X5
2
2
1.5 mm
2
1.5 mm
1.5 mm
2
2.5 mm
2
2.5 mm
2
0.5 ÷ 1 mm
2
0.14 ÷ 0.22 mm
2
0.14 mm
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Capitolo 5 - Messa in Servizio
Introduzione
Questo Capitolo descrive il programma applicativo di configurazione
e messa in servizio degli azionamenti MINIVECTOR 300.
Per Cominciare
Per configurare e parametrizzare MINIVECTOR 300 è indispensabile
il software d’interfaccia “MiniVector Interface” che guida l’utente nella
messa a punto del convertitore, visualizza le grandezze elettriche e
meccaniche e consente di identificare gli eventuali allarmi.
I requisiti hardware e software per l’installazione di “MiniVector
Interface” sono i seguenti: PC con Windows 95, 98, NT, 2000, XP,
una linea seriale RS-232 o RS-485, almeno 2 Mbyte di spazio libero
sul disco rigido.
Per installare “MiniVector Interface” inserire il CD d’installazione
fornito con il convertitore nel lettore CD-ROM. Lanciare il
programma d’installazione setup.exe e seguire le istruzioni a video.
Il browser “MiniVector Interface” permette di fare le seguenti
operazioni:
•
Identificare il modello e la taglia del convertitore con le
versioni del firmware attualmente residente
•
Lettura e scrittura dei parametri dell’azionamento,
caricamento e salvataggio su file dell’insieme dei parametri e
delle informazioni di base, aggiornamento della versione di
firmware
•
Salvataggio della configurazione corrente sulla memoria
EEPROM del convertitore
•
Controllo e monitoraggio in tempo reale delle grandezze
fisiche dell’azionamento, sia in valore digitale che analogico
tramite la funzione di oscilloscopio
•
Controllo real-time della condizione di stato e degli allarmi
eventualmente presenti.
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
5-1
Capitolo 5 - Messa in Servizio
Il Browser MiniVector
Interface
Browser Offline
Browser Online
5-2
All’avvio del software “MiniVector Interface” compare una finestra
nella qual è possibile selezionare il modo di funzionamento off-line o
on-line del browser.
La funzione offline consente di preimpostare i parametri
dell’azionamento in funzione dell’applicazione e di salvarli su file
senza necessità di essere connessi al drive. Il file così realizzato
potrà essere in seguito caricato nell’azionamento.
•
Selezionare la modalità off-line e la taglia di corrente del drive
con il quale s’intende realizzare l’applicazione.
•
Selezionare nel menù “Commands” il comando “Select
motor”; scegliere quindi il tipo di motore che si vuole utilizzare.
•
Modificare i parametri per adattarli all’applicazione.
•
Salvare le impostazioni su disco tramite il comando “Save as”
del menù “File”.
La funzione online permette di parametrizzare un’azionamento
collegato.
•
Selezionare la modalità on-line. Selezionare l’indirizzo
dell’RS232/485 (normalmente alla prima accensione il drive è
impostato a indirizzo 0).
•
Selezionare nel menù “Commands” il comando “Select
motor”; scegliere quindi il tipo di motore che si vuole utilizzare.
•
Modificare i parametri per adattarli all’applicazione.
•
Salvare le modifiche apportate nella memoria EEPROM
mediante il comando “Freeze configuration” nel menù
“Commands”.
•
Salvare le impostazioni su disco tramite il comando “Save as”
del menù “File”.
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Capitolo 5 - Messa in Servizio
Nel caso in cui si abbia già a disposizione il file parametri relativo
all’applicazione occorre:
•
Selezionare nel menù “File” il comando “Open” e scegliere
quindi il file relativo all’applicazione.
•
Salvare le modifiche apportate nella memoria EEPROM
mediante il comando “Freeze configuration” nel menù
“Commands”.
Nota.
Per il collegamento online, selezionare dal menu Commands
– Change COM Port … la porta di comunicazione seriale del
vostro PC.
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
5-3
Capitolo 5 - Messa in Servizio
Startup Assistant
Una volta effettuate tali operazioni nella pagina Startup Assistant
sono visibili i dati identificativi dell’azionamento: Drive Model, Size,
Serial Number, Boot version, Firmware Version, Config Version,
Motor poles. Queste informazioni non possono essere modificate
dall'utente, ad eccezione dei campi Application Description e Motor
poles. Utilizzate il campo Application Description per memorizzare
informazioni relative all’applicazione.
La taglia (Size) viene espressa nel formato In/Ip, dove In rappresenta
la corrente nominale del convertitore e Ip la corrente di picco.
Entrambi i valori sono da considerarsi espressi in ampere efficaci.
Tre spie luminose mostrano l'attuale stato di Enable, Ext. Ref.
Enable, Fault. Dodici più piccole spie luminose mostrano le
eventuali sicurezze attive.
Per la visualizzazione, l'impostazione e la modifica dei parametri
utilizzate le seguenti icone:
Selector consente di commutare tra diverse modalità di
funzionamento (ad es. modo corrente/velocità) o di fare
semplici selezioni (ad es. impostazione della risoluzione
dell’emulazione encoder).
Trimmer permette una regolazione fine dei parametri che
richiedono una taratura per ottimizzare le prestazioni
dell’azionamento (ad es. i guadagni dell’anello di
velocità).
Parameter serve ad impostare un dato caratteristico
dell’azionamento (ad es. la corrente di picco).
Altre informazioni relative all'asse (posizione, velocità, corrente,
riferimento esterno, corrente efficace) sono disponibili in cinque
campi di visualizzazione. Il loro valore viene aggiornato ogni 0,5
secondi se la comunicazione seriale è attiva.
5-4
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Capitolo 5 - Messa in Servizio
Block Analyzer
Command Generator
Con un click del mouse sull’immagine del convertitore o dal menù
Tools – Block Analyzer potete accedere alla successiva finestra.
Questa finestra offre una veduta d’insieme dei blocchi costituenti il
convertitore, oltre al monitoraggio di alcune grandezze. Con un
successivo click su ciascuno dei blocchi potete passare alle relative
finestre.
La pagina Command Generator illustra la sezione di impostazione e
condizionamento dell'ingresso di riferimento e consente di impostare i
parametri relativi all'anello di velocità.
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
5-5
Capitolo 5 - Messa in Servizio
Current Regulator
Resolver Converter
5-6
La pagina Current Regulator contiene i parametri per la taratura
dell’anello di corrente. Questi parametri sono sottoposti a restrizioni di
accesso (password).
La pagina Resolver Converter si riferisce al feedback di posizione
proveniente dal resolver e consente di impostare la risoluzione
dell’uscita encoder e l’angolo di fase tra motore e resolver. Non sono
richieste altre regolazioni, in quanto il livello dei segnali di ritorno del
resolver e la relazione di fase con la portante vengono
automaticamente tarati ad ogni accensione del convertitore.
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Capitolo 5 - Messa in Servizio
Power Drive
La finestra Power Drive illustra lo stato dello stadio di potenza del
convertitore. Qui è inoltre possibile abilitare/disabilitare il riferimento
esterno (pulsante Ext. Ref. enable) e il convertitore stesso (pulsante
General Enable).
L'interruttore General Enable deve essere sempre ON per abilitare
la potenza all'azionamento.
L'interruttore External Reference Enable deve essere ON durante il
normale funzionamento.
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
5-7
Capitolo 5 - Messa in Servizio
Waveform Generator
Queste funzioni di utilità sono accessibili col comando Tools –
Waveform Generator.
La funzione oscilloscopio opera e visualizza esattamente come sul
pannello frontale di un normale oscilloscopio digitale. Sono disponibili
pulsanti per la selezione del livello, del fronte, della posizione e del
canale di trigger.
L'acquisizione dei segnali inizia premendo il pulsante Start. La spia
luminosa Triggered si illumina quando la condizione di trigger si è
verificata. La spia luminosa Data Ready si accende quando il buffer
dati acquisiti è completo. La condizione di Trigger può essere forzata
in qualsiasi momento utilizzando il pulsante Force. In tal caso
l'acquisizione inizia immediatamente. E' anche disponibile la funzione
di trigger automatico (pulsante Auto).
L'azionamento MINIVECTOR 300 memorizza i campioni dei due
canali selezionati (il buffer dati è costituito da 1024 campionamenti
con intervallo di 1 msec). I dati possono essere trasferiti al display
oscilloscopio solo se è stata abilitata ed è attiva la comunicazione
seriale (é già stato attivato il comando Connect e lo stato della linea
seriale visualizza il messaggio ON LINE ).
La selezione dei canali da acquisire e visualizzare viene eseguita
selezionando sulla prima colonnina (Trigger) a fianco del visore
oscilloscopio la grandezza su cui triggerare e sull'altra colonnina
(Show) la seconda grandezza.
La funzione Waveform Generator consente di comandare
l'azionamento con un generatore digitale di forme d'onda in funzione
della selezione del modo di controllo (corrente/velocità). Si può
programmare l'ampiezza, la forma ed il periodo della forma d'onda.
Per sicurezza, col comando di Stop l'azionamento viene disabilitato.
Per riabilitarlo usare il pulsante Enable della finestra Power Driver.
Inoltre, per facilitare la taratura del convertitore e osservarne la
risposta nella finestra dell’oscilloscopio, avete accesso diretto ai
guadagni proporzionale e integrativo dei regolatori di corrente e
velocità.
5-8
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Capitolo 5 - Messa in Servizio
Impostazione dei
Parametri
Di seguito sono elencati tutti i parametri che possono essere
impostati attraverso il programma “MiniVector Interface”. Con un click
del mouse sull'icona corrispondente al parametro desiderato si apre
la finestra di visualizzazione del valore attuale e di eventuale
modifica. A seconda del tipo di parametro appare una finestra di
impostazione da tastiera, oppure una finestra di selezione da mouse,
oppure una finestra di variazione con i cursori per l'incremento o la
diminuzione del valore. Dopo l'aggiustamento del valore, attivate la
variazione con un click del mouse sul pulsante Set e quindi uscite
dalla fase di impostazione con un click del mouse sul pulsante Done.
Nota.
Funzioni di Limitazione
Tutti i parametri sono memorizzati in RAM volatile finché la
configurazione non viene salvata nella memoria EEPROM
del convertitore (vedere il paragrafo Salvataggio dei
Parametri). Se l'azionamento viene spento durante
l’esecuzione del comando di Freeze tutti i dati della
configurazione corrente vengono persi.
I parametri seguenti permettono di stabilire i limiti di corrente
dell'azionamento e di impostare le soglie di intervento delle protezioni
di corrente.
Ricordiamo che In (in Arms) rappresenta la corrente nominale del
convertitore e Ip (in Arms) la corrente di picco.
Continuous Current
E’ la corrente che può essere assorbita dal motore in modo
continuativo; il valore massimo impostabile è pari a In. Gli
interventi delle protezioni di Ixt del convertitore e di I2xt del motore
limitano automaticamente a questo valore la corrente erogabile.
L'accesso è protetto da password.
Peak Current
E’ la corrente massima di breve durata (2 s) che può essere
assorbita dal motore. Il valore massimo impostabile è pari a Ip.
Brake Current
E’ il valore della corrente durante l’intervento della frenatura
dinamica del motore. L'intervallo di impostazione va da zero a 1,2
· In.
Overspeed Threshold
E’ la soglia di intervento della protezione di overspeed. Il range di
impostazione va da zero fino a 6750 rpm.
Motor I2xt Threshold
E’ il valore della soglia di attivazione della protezione I2xt del
motore. L'intervallo di impostazione va da zero a 1,1 · In.
L'accesso è protetto da password.
Motor Thermal Constant
E’ il valore della costante di tempo termica del motore. E'
impostabile tra 1' e 55'. L'accesso è protetto da password.
Motor poles
Numero di coppie polari magnetiche del motore. Il dato può
essere impostato unicamente in modo automatico attivando la
procedura di ricerca del numero di poli e dell'angolo tra motore e
resolver (vedere il paragrafo La Procedura di Autophasing).
ATTENZIONE! Il comando Select Motor definisce in
automatico il valore di questi parametri calcolati per
ottenere prestazioni ottimali dall’accoppiamento motoreconvertitore.
Nella pagina sono inoltre accessibili i parametri Speed Command
Adjust, Reference Offset Compensation, Speed Proportional Gain,
Speed Integrative Gain che sono parte essenziale della finestra
Command Generator.
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
5-9
Capitolo 5 - Messa in Servizio
Selezione del Modo
Operativo
Il convertitore MINIVECTOR 300 è concepito per funzionare in
controllo di velocità o di corrente da riferimento analogico esterno. E'
possibile comunque commutare il riferimento sul generatore digitale
interno di forme d'onda per effettuare la messa a punto dei regolatori.
Il selettore Speed/Current Loop Selection permette di commutare tra
la modalità di controllo in corrente e la modalità di controllo in
velocità.
Current mode
Nel modo corrente il riferimento esterno pilota direttamente l'anello di
corrente dell'azionamento; la regolazione è effettuata con la tecnica
dei vettori di spazio secondo gli assi diretto e in quadratura del
motore, in modo da ottimizzare la produzione di coppia a parità di
corrente erogata.
Speed mode
Nel modo velocità il riferimento esterno comanda l'anello di controllo
della velocità che, a sua volta, pilota l'anello più interno di corrente.
Condizionamento del
Riferimento Esterno
Attraverso il selettore Reference Source Selection è possibile
scegliere tra quattro modalità di comando dell’anello di velocità o di
corrente:
•
External: comando dal segnale analogico di riferimento con
applicazione di un filtro digitale;
•
Internal comando da segnale digitale interno. In questo caso
il motore si porta alla velocità massima impostata con il
parametro Speed Command Adjust:;
•
External with Ramp: comando analogico con interposizione
del filtro a rampa;
•
External without BW Filter: comando analogico senza filtro
digitale.
Reference Offset
Compensation
compensazione dell’offset presente sull'ingresso analogico di
riferimento. Il range di compensazione è di ± 300 mV.
Reference Range
Adjust
amplificazione dell'ingresso di riferimento, compresa tra il 100% e
il 400%. Consente di dare pieno comando al convertitore anche
con ingresso inferiore a ± 10 V, fino a un minimo di ± 2,5V. Se ad
esempio il livello dell’ingresso è di ± 4 V impostate
l’amplificazione al 250% (4 V ± 2,5 = 10 V).
Reference Bandwidth
Adjust
impostazione della banda passante, fra 5 Hz e 5 kHz, del filtro
posto sul riferimento esterno.
regolazione della durata della rampa, tra 0.01 s e 50.00 s. Questo
tempo è da intendersi come il tempo impiegato dalla rampa per
passare dalla velocità zero alla massima velocità impostata con il
parametro Speed Command Adjust.
Ramp Acceleration
Adjust
5-10
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Capitolo 5 - Messa in Servizio
Taratura dell’Anello di
Velocità
Taratura dell’Anello di
Corrente
I seguenti parametri vi permettono di configurare l’anello di velocità:
Speed Command Adjust
Impostazione della velocità massima comandabile al
servomotore. Nel caso di comando interno serve a regolare la
velocità del motore stesso. Questo parametro non interviene
quando si opera con il generatore digitale interno di forme
d'onda.
Speed Proportional Gain
Guadagno proporzionale dell'anello di velocità.
Speed Integral Gain
Guadagno integrativo dell’anello di velocità.
Nella pagina Current Regulator sono possibili le seguenti regolazioni.
ATTENZIONE! Il comando Select Motor definisce in
automatico il valore di questi parametri calcolati per
ottenere prestazioni ottimali da ciascun accoppiamento
convertitore-motore.
Current Proportional Gain
Guadagno proporzionale dell’anello di corrente.
Current Integrative Gain
Guadagno integrativo dell’anello di corrente.
Encoder Simulation
Resolution
Impostazione della risoluzione dell’uscita encoder. La
risoluzione può essere scelta tra quattro valori: 128, 256, 512
e 1024 impulsi/giro.
Resolver Phase Adder
Regolazione dell’angolo di fase tra motore e resolver. Questo
parametro può essere determinato automaticamente
attivando la procedura di Autophasing (vedere il paragrafo La
Procedura di Autophasing). L'accesso a questo parametro è
protetto (password). La funzione “Select Motor” definisce in
automatico il valore di questo parametro per i motori ABB.
Risoluzione
dell’Emulazione
Encoder
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
5-11
Capitolo 5 - Messa in Servizio
Autophasing
La procedura di Autophasing (autofasatura) consente di determinare
in modo automatico il numero di poli del motore e l'angolo di fase tra
motore e resolver. Questa procedura è attivabile durante
l'impostazione del parametro Motor Poles (pagina Startup Assistant)
e del parametro Resolver Phase Adder (pagina Resolver Converter).
Inoltre l'Autophasing fornisce una diagnostica di base sulla
correttezza dei cablaggi del convertitore e rappresenta un primo test
sul corretto funzionamento del medesimo.
Nota.
Quando si impiegano servomotori ABB non è necessario
effettuare questa procedura poiché i motori sono già stati
fasati in fabbrica.
ATTENZIONE! La funzione di Autophasing abilita lo stadio
di potenza del convertitore e provoca il movimento del
motore. Affinché la procedura venga eseguita
correttamente e non provochi inconvenienti all'asse su cui
sia eventualmente già collegato l'azionamento, si
raccomanda di disconnettere il motore dagli organi
meccanici di trasmissione del moto.
Per ragioni di sicurezza, al termine della procedura l'azionamento
rimane disabilitato. Per riabilitarlo occorre premere il tasto General
Enable nella finestra Power Drive.
In alcune circostanze la procedura di Autophasing non può essere
portata a termine e viene visualizzato un messaggio di diagnostica
che suggerisce il provvedimento da prendere:
5-12
•
No power input enable: assenza dell’abilitazione hardware;
attivate l'ingresso di Enable e riavviate la procedura.
•
Motor with 2 inverted phases: le fasi del motore sono state
collegate in ordine invertito per cui il motore, durante la
procedura, ruota in senso antiorario anziché orario; spegnete
l'azionamento, modificate i collegamenti e ripetete la
procedura.
•
Not moving motor: accertatevi che il motore sia collegato
correttamente al convertitore e che non vi sia alcuna
protezione attivata.
•
Unknown motor type: la procedura riconosce
automaticamente motori con 2, 4, 6 e 8 poli; verificate il
numero di poli del motore e introducete manualmente, se
occorre, il numero di poli.
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Capitolo 5 - Messa in Servizio
Frenatura Dinamica
Il convertitore MINIVECTOR 300 dispone di un sistema di frenatura di
emergenza denominato Frenatura Dinamica che consiste nel
cortocircuitare i morsetti del motore mantenendo sotto controllo la
corrente che vi circola. Il valore della corrente di frenatura può essere
impostato con il parametro Brake Current.
La frenatura dinamica è attiva quando il convertitore è disabilitato e
quando si verifica un fault (ad eccezione di overcurrent e
overvoltage), purché l'ingresso digitale di sblocco (BRK UNLOCK)
venga mantenuto basso (0V).
Rispetto ad altre tecniche di frenata, la frenatura dinamica presenta
il vantaggio di poter funzionare anche in assenza di feedback dal
resolver, ciò che impedirebbe, ad esempio, di arrestare il motore
imponendo un comando di velocità a zero.
Salvataggio Parametri
Dopo che l'azionamento è stato configurato come richiesto
dall'applicazione, i parametri devono essere copiati dalla memoria
volatile e salvati nella memoria permanente interna al
servoamplificatore. Per eseguire questa operazione utilizzate il
comando Freeze Configuration della tendina del menu Commands. Il
programma richiede anche il nome di un file dove memorizzare i
parametri da salvare sul disco rigido del PC.
E' possibile salvare l'attuale configurazione parametri anche in un
file su disco, usando il comando Save As... nel menù File. Le
configurazioni salvate su PC possono essere utili come
documentazione dell'applicazione ed anche per l'inizializzazione di
altri azionamenti con gli stessi parametri. A tale scopo usate il
comando Open... del menù File. Il file selezionato viene usato per
eseguire l'impostazione automatica dei parametri dell'azionamento.
Al termine occorre ricordarsi di attuare il comando Freeze
Configuration per salvare in modo permanente la configurazione
caricata.
Per sicurezza, durante il caricamento da file il convertitore viene
disabilitato; per riabilitarlo premere il tasto General Enable nella
finestra Power Drive.
Con il comando Commands – Select Motor si accede invece alla
libreria dei file con le configurazioni predefinite motore-convertitore.
Nel caso alcuni parametri siano stati impostati con valori non
corretti, possono essere caricati nuovamente dei valori di default
(impostati in fabbrica) utilizzando il comando Commands – Specials
– Flash upgrade – Reset Parameters.
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
5-13
Capitolo 5 - Messa in Servizio
Aggiornamento
Firmware
Assieme ad una nuova versione dell’interfaccia grafica MiniVector
Interface viene fornita anche una versione aggiornata del firmware
per il convertitore. Questa versione può essere scaricata nel
convertitore con il comando Commands – Specials – Flash upgrade –
Download Firmware. Durante l’aggiornamento del firmware il
convertitore viene disabilitato e il LED posto sul pannello frontale è
rosso lampeggiante.
Se all’accensione il LED si presenta rosso lampeggiante significa
che sul convertitore non è presente una versione valida di firmware;
caricare il firmware tramite il comando suddetto.
Gestione delle
Emergenze
Stati del Convertitore
Funzioni Arresto di
Emergenza
5-14
Questo paragrafo fornisce una breve descrizione della gestione delle
condizioni di emergenza e dell’identificazione delle possibili cause di
fault, nonché del funzionamento interno del convertitore.
Il convertitore MINIVECTOR 300 può trovarsi in diverse condizioni
operative che dipendono dai comandi esterni e dagli eventi occorsi
durante il funzionamento. Ciascuna di queste condizioni rappresenta
uno stato del convertitore:
•
Stato di Stop: il convertitore è disabilitato, con il LED verde
lampeggiante; se sono presenti delle protezioni attivate
(warnings) il LED è giallo lampeggiante mentre in caso di
malfunzionamenti (faults) il LED emette una sequenza di
impulsi rossi e verdi indicanti l’errore che si è verificato. Il
comando di BRK UNLOCK consente di rilasciare il freno di
stazionamento e di inibire la frenatura dinamica; agendo sul
comando di ENABLE si passa nello stato di Running.
•
Stato di Running: il convertitore è pienamente abilitato ad
operare e lo stadio di potenza è attivo; il LED è verde fisso
(giallo se sono presenti dei warnings); non vi sono faults; il
comando di ENABLE permette di tornare nello stato di Stop.
Nel caso di faults si passa automaticamente nello stato di
Stop.
Al verificarsi di un fault l’azionamento, se abilitato, passa nello stato di
Stop. Questa condizione viene segnalata all’esterno dall’attivazione
dell’uscita di fault e dal led posto sul frontale del convertitore, che
emette una sequenza di impulsi rossi e verdi. La frenatura dinamica
del motore è consentita in tutti i casi ad eccezione dell’Overcurrent,
dell’Overvoltage e del fault delle tensioni di servizio (EVSN), mentre il
freno di stazionamento, se presente, può sempre essere rilasciato. La
frenatura dinamica e il freno di stazionamento, comunque,
intervengono solo se l’ingresso di sblocco (BRK UNLOCK ) viene
mantenuto basso (connesso a 0 V).
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Capitolo 5 - Messa in Servizio
Reset dei Fault
Quando il convertitore entra nello stato di Stop per il verificarsi di un
fault vi resta finché le cause di fault persistono e non si agisce
sull'ingresso di ENABLE. Per resettare le protezioni e tornare nello
stato di Running è sufficiente disabilitare il convertitore e riabilitarlo:
se le cause di fault sono state rimosse il convertitore si riabilita e
torna nello stato di Running.
I codici di fault sono riportati in Appendice A.
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
5-15
Capitolo 5 - Messa in Servizio
Questa pagina è stata lasciata volutamente bianca.
5-16
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Capitolo 6 - Normativa EMC
Introduzione
Questo Capitolo illustra le linee guida ed i requisiti EMC per
l’installazione dei servoazionamenti MINIVECTOR 300.
Premessa
Il convertitore e' un prodotto destinato ad essere incorporato in
un’apparecchiatura più complessa. Per tale ragione, la compatibilità
elettromagnetica dipende da fattori che non sono totalmente sotto il
controllo del fabbricante, ma dipendono dall'installazione, dal cablaggio
e dalla messa a terra.
In questo manuale sono fornite le istruzioni per l'installazione al fine di
ottenere risultati conformi alle normative vigenti relative alla
compatibilità elettromagnetica. Esse sono state ottenute da una
campagna di prove ed il loro scopo è rendere il lavoro dell’utente finale
il più semplice possibile.
Normativa di
Riferimento
La normativa vigente utilizzata all’atto della certificazione del prodotto è
la seguente:
•
EN61800-3
Azionamenti elettrici a velocità variabile. Parte 3:
Norma di prodotto relativa alla compatibilità
elettromagnetica ed ai metodi di prova specifici
(edizione Prima, 1996).
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
6-1
Capitolo 6 - Normativa EMC
Definizioni
Distribuzione Ristretta
Modalità di commercializzazione in cui il costruttore limita la fornitura di
apparecchi a fornitori, clienti o utilizzatori che, separatamente o
congiuntamente, abbiano competenza tecnica dei requisiti EMC per
l’applicazione di azionamenti.
Primo Ambiente
Ambiente che comprende le utenze domestiche. Comprende anche le
utenze industriali collegate direttamente, senza trasformatori intermedi,
a una rete di alimentazione elettrica a bassa tensione che alimenta
edifici adibiti a scopi domestici.
Secondo Ambiente
Ambiente che comprende le utenze industriali diverse da quelle
collegate direttamente a una rete di alimentazione elettrica a bassa
tensione che alimenta edifici adibiti a scopi domestici.
230Vac
Monofase
Installazione in Primo
Ambiente
A
Unità di
Controllo
Resistenza
di Frenatura
Esterna
Resolver
Convertitore
D
R
B
M
MINIV ECTOR 300
Interruttore
Principale
LD
C
Filtro
di Rete
X1
X4
X5
E
X6
X2
Fusibili
X3
Motore
X7
X8
6-2
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Capitolo 6 - Normativa EMC
•
Cavo di alimentazione (A): nessuna prescrizione.
•
Cavo motore (B): per prevenire le emissioni del cavo motore
è necessario impiegare un cavo schermato. La schermatura
deve essere collegata sia alla terra del convertitore che al
morsetto di terra del motore. Il cavo deve avere una
lunghezza minore o uguale a 25m.
•
Resistenza di clamp (C): collegata tramite cavo intrecciato
avente lunghezza minore o uguale a 2m.
•
Cavo segnali motore (D): cavo schermato di lunghezza
minore o uguale a 25m.
•
Connessione al controllo (E): cavo schermato di lunghezza
minore o uguale a 3m.
•
Filtro di rete: Siemens B84142-A XXR con le seguenti
caratteristiche:
•
Conformità
-
Tensione di nominale: 440/250 Vac, 50/60Hz
-
Numero delle fasi: 2
-
Campo di temperatura consentito: -25..+40 gradi
-
Corrente nominale: range consentito XX = 10 A
Cabina: l'intera apparecchiatura è contenuta in una cabina
metallica chiusa su tutti i lati.
Il convertitore in questa configurazione è conforme a quanto richiesto
dalle normative sopra citate.
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
6-3
Capitolo 6 - Normativa EMC
Installazione in
Secondo Ambiente
230Vac
Monofase
A
Resistenza
di Frenatura
Esterna
Convertitore
Resolver
D
R
MINIV ECTOR 300
LD
Fusibili
C
X1
Motore
X4
B
M
Unità di
Controllo
X5
X6
X2
E
X3
X7
X8
Conformità
•
Cavo di alimentazione (A): nessuna prescrizione.
•
Cavo motore (B): per prevenire le emissioni del cavo motore
è necessario impiegare un cavo schermato. La schermatura
deve essere collegata sia alla terra del convertitore che al
morsetto di terra del motore. Il cavo deve avere una
lunghezza minore o uguale a 25m.
•
Resistenza di clamp (C): collegata tramite cavo intrecciato
avente lunghezza minore o uguale a 2m.
•
Cavo segnali motore (D): cavo schermato di lunghezza
minore o uguale a 25m.
•
Connessione al controllo (E): cavo schermato di lunghezza
minore o uguale a 3m.
Il convertitore in questa configurazione è conforme a tutte le normative
riguardanti l' immunità (EN50082-2).
Il convertitore in questa configurazione non è conforme alla normativa
EN55011 (Emissione).
Il convertitore in questa configurazione è conforme alla norma di
prodotto EN61800-3 per la classe Distribuzione Ristretta e Secondo
Ambiente.
6-4
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Appendice A - Codici di Errore
Introduzione
This section provides descriptions of Warnings and Faults for
MINIVECTOR 300.
Fault e Warning
Nella pagina Startup Assistant compaiono le indicazioni luminose
degli eventuali allarmi attivati. Questi allarmi possono essere suddivisi
in due categorie:
•
Warning (avvertimenti): segnalano un sovraccarico di
corrente nel convertitore (protezione di Ixt) o nel motore
(I2xt); l’azionamento non viene arrestato ma le prestazioni
vengono automaticamente limitate;
•
Fault (malfunzionamenti): segnalano la presenza di un
guasto o di una condizione potenzialmente pericolosa che
richiede l’arresto immediato del motore.
Per maggiori informazioni riguardo le modalità di intervento ed
eliminazione degli errori vedi anche Funzioni Arresto di Emergenza
e Reset dei Fault.
La tabella seguente descrive le segnalazioni del LED.
Warning
Colore LED
Descrizione dello stato dell’azionamento
Red blinking
Green blinking
Green
Yellow
Red and green sequence
Firmware assente nel convertitore
Convertitore disabilitato
Convertitore abilitato
Stato di Warning (vedi sezione Warning)
Stato di Fault (vedi sezione Fault)
Lo Stato di Warning comprende:
Warning
Descrizione
Drive protection function Ixt
Si attiva quando la corrente media erogata dal convertitore
ha superato la corrente continuativa nominale. Interviene
limitando il comando di corrente al valore del parametro
Continuous Current. La protezione si disattiva quando la
corrente rientra nei limiti prestabiliti.
Motor protection function I2xt
Si attiva quando la corrente media assorbita dal motore ha
superato il limite impostato dal parametro Motor I2xt
Threshold. Interviene limitando il comando di corrente al
valore del parametro Continuous Current. La protezione si
disattiva quando la corrente rientra nei limiti prestabiliti.
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
A-1
Appendice A - Codici di Errore
Fault
Di seguito è riportato l’elenco dei Fault con le relative modalità di
intervento. I codici di errore si riferiscono alla sequenza di lampi rossi
e verdi emessi dall’indicatore a LED. Se è presente più di un fault,
viene mostrato il fault con la priorità più alta (1 = massima priorità).
V sta per verde, R per rosso.
Codice di Errore
A-2
Descrizione
VVVR
Overvoltage Protection
interviene quando la tensione sullo
stadio intermedio di potenza ha
ecceduto il limite massimo; anche in
questo caso la potenza viene
disabilitata.
VVRV
Undervoltage Protection
interviene quando la tensione sullo
stadio intermedio di potenza è scesa al
di sotto di un valore minimo; è
consentita la frenatura dinamica del
motore. Questa protezione viene
mascherata se il convertitore si trova
nello stato di Stop, per consentirne
l'accensione con la sola tensione
ausiliaria.
VVRR
Power Supply Fault (EVSN) interviene quando le tensioni ausiliarie
di alimentazione si discostano dai valori
prestabiliti.
VRVV
Overcurrent Protection: interviene in seguito ad un sovraccarico di
corrente negli interruttori dello stadio di
potenza. Provoca la disabilitazione
immediata dello stadio di potenza.
VRVR
Resolver Fault
mancanza di uno o più segnali del
resolver; la frenatura dinamica è
permessa.
VRRV
Overspeed
superamento del limite massimo di
velocità; la frenatura dinamica è
permessa.
VRRR
Overtemperature Motor
sovratemperatura del motore; è ancora
consentita la frenatura dinamica del
motore.
RVVV
Overtemperature Drive
sovratemperatura del convertitore; è
ancora consentita la frenatura dinamica
del motore.
RVVR
Internal Error
errore di comunicazione tra
microcontrollore e DSP dovuto
probabilmente a un guasto hardware
sulla scheda di controllo. Per ripristinare
questo errore è necessario spegnere il
convertitore.
RVRV
24 V Brake Fault
mancanza della tensione necessaria (24
Vdc) per pilotare il freno
elettromeccanico di stazionamento.
Questa protezione viene mascherata se
il convertitore si trova nello stato di
Stop.
RVRR
Errore Checksum Parametri la checksum dei parametri salvati nella
EEPROM del convertitore non è
verificata. Per ripristinare questo errore
è necessario effettuare un reset dei
parametri e spegnere il convertitore.
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
Appendice B - Condizioni Ambientali
Condizioni Operative
Le condizioni operative si riferiscono alle condizioni di funzionamento
a cui possono essere soggetti apparecchi MNIVECTOR 300 installati
ed in servizio.
Installazione
Meccannica
Come prescritto in questo Manuale, Capitolo 3
- Installazione
Installazione
Elettrica
Come prescritto in questo Manuale, Capitolo 3
- Installazione
Conformità alle
Direttive EMC
Come prescritto in questo Manuale, Capitolo 5
- Normativa EMC
Grado di protezione Come prescritto in questo Manuale
Condizioni di
Immagazzinamento
Temperatura
Ambiente
Da 0 a + 40 °C; da + 40 a massimo + 55 °C
con un declassamento pari al 2,5 %/°C
Umidità
Massimo 85 %, non è consentita condensa
Altitudine
Da 0 a 1000 m.s.l.m.; da 1000 a massimo
2000 m.s.l.m. con un declassamento pari
all’1% per ogni 100 m.
Vibrazioni
Non ammesse. Devono essere usati sistemi di
isolamento delle vibrazioni
Shock Meccanico
Non ammesso. Devono essere usati sistemi
per la riduzione o eliminazione degli urti
Le condizioni di immagazzinamento si riferiscono ad apparecchi
MNIVECTOR 300 conservati nel loro involucro, o imballaggio,
protettivo.
Temperatura
Da – 25 a + 55 °C. Occasionalmente e per
brevi periodi, non superiori alle 24 h, fino a
+70 °C
Umidità
Massimo 85 %, non è consentita condensa
Vibrazioni
Non ammesse
Shock Meccanico
Non ammesso
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
B-1
Appendice B - Condizioni Ambientali
Condizioni di
Trasporto
B-2
Le condizioni di trasporto si riferiscono ad apparecchi MNIVECTOR
300 conservati nel loro involucro, o imballaggio, protettivo.
Temperatura
Da – 25 a + 55 °C. Occasionalmente e per
brevi periodi, non superiori alle 24 h, fino a
+70 °C
Umidità
Massimo 85 %, non è consentita condensa
Vibrazioni
Tollerate solo se con convertitore nel suo
imballaggio integro.
Shock Meccanico
Tollerate solo se con convertitore nel suo
imballaggio integro.
Manuale di Installazione e Messa in Servizio - MANIU11.0410 I
MINIVECTOR 300
MANIU11.0410 I
ABB Sace S.p.a.
Linea S (Servomotors & Servodrives)
Direzione, Uffici e Stabilimento
Frazione Stazione Portacomaro, 97/C
I - 14100 Asti
ITALIA
Telefono: +39 0141 276 111
Fax:
+39 0141 276 294
E-mail:
[email protected]
Internet:
www.abb.com Servomotors
ABB Sace S.p.a.
Linea S (Servomotors & Servodrives)
Export
Via Luciano Lama, 33
I - 20090 Sesto San Giovanni (MI)
ITALY
Telefono:
+39 02 2414 3562
Fax:
+39 02 2414 3972
E-mail:
[email protected]