INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
Mitsubishi Electric – Factory Automation - Freqrol inverter
INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
TEORIA
Un encoder è essenzialmente un trasduttore di posizione angolare oppure lineare di tipo elettromeccanico in
grado di fornire come grandezza di uscita un segnale elettrico di tipo numerico oppure analogico.
L’encoder come dispositivo trasforma quindi un movimento meccanico in una grandezza di natura differente che
risulta essere sempre una tensione oppure una corrente a seconda dell’interfaccia di uscita integrata all’interno
dell’encoder stesso.
Si definisce ENCODING il processo di trasformazione del movimento meccanico che attua la rotazione dell’albero
dell’encoder in valori digitali/analogici.
Questo processo di codifica è di tipo discreto (quantizzato), cioà la posizione dell’albero dell’encoder viene rilevata
secondo passi discreti definiti dalla RISOLUZIONE dell’encoder stesso.
A seconda del modello di encoder si possono avere risoluzioni da un minimo di 1 impulso/giro fino a 360000
impulsi/giro.
La risoluzione dell’encoder definisce quindi la massima precisione ottenibile sulla misura dell’angolo giro.
Il mondo degli encoder generalmente si suddivide in due grandi famiglie:
• encoder incrementali
• encoder assoluti (monogiro/multigiro, programmabili)
Il principio di funzionamento su cui si basa ogni singola famiglia è il medesimo, ma l’informazione di posizione
viene presentata all’utente in due modi differenti. Nel caso degli encoder incrementali si ha un treno di impulsi
(rettangolare oppure sinusoidale) che rappresenta il passaggio da una posizione dell’albero a quella
immediatamente adiacente secondo la risoluzione dell’encoder stesso; nel caso degli encoder assoluti in uscita si
ha una stringa di bit (codice di uscita) che rappresenta in modo univoco la posizione dell’albero dell’encoder,
inoltre tale posizione viene mantenuta (memoria) anche ad encoder spento, questa è la differenza principale tra le
due famiglie di encoder.
Mitsubishi Electric – Factory Automation - Freqrol inverter
INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
Gli encoder possono essere quindi definiti come dei controllori di posizione (trasduttore di posizione/velocità), in
pratica servono per capire dove si trova fisicamente l’asse in movimento in un determinato istante.
Quindi viene fatta una correlazione fra i giri dell' albero motore e l' incremento di posizione, considerando che un
giro completo sia diviso in tanti settori (o spicchi) e che per ogni spicchio di rotazione venga rilevato un numero n
di impulsi, così detto in maniera molto semplicistica, viene calcolata la posizione rispetto ad un punto 0 di
partenza.
Le tecniche di utilizzo sono diverse e dipendono dal tipo di azionamento.
Ad esempio un sistema retroazionato in posizione, se lavora correttamente, raggiunta la posizione assegnata non
si può spostare perchè ad ogni tentativo di scostamento il controllo lo riporta in posizione.
Ovviamente la reattività è tale che questi movimenti non sono avvertibili. In pratica è sufficiente che l'asse tenda a
muoversi che il circuito di controllo reagisce eseguendo la correzione necessaria.
Mitsubishi Electric – Factory Automation - Freqrol inverter
INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
Mitsubishi Electric – Factory Automation - Freqrol inverter
INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
CONTROLLO ENCODER
L’encoder deve essere calettato sul motore.
Verificare cablaggi e jumper scheda di retroazione (la tensione di alimentazione
dell’encoder deve essere fornita esternamente) a seconda del tipo di encoder utilizzato.
Configurazione cavo schermato:
.
Mitsubishi Electric – Factory Automation - Freqrol inverter
INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
Controllo:
• provare prima in V/f con parametri motore, movimentazione.
• impostare nel Pr.369 impulsi encoder
• impostare numero poli motore nel Pr.81
• impostare Pr.367 (scorrimentoxnumerodipoli)/120=hz
Eseguire un test in PU a 5Hz, vedere correzione (5,05Hz comunque in base al Pr.367).
Verificare senso di marcia (dando FWD da tastiera il motore si deve portare in rotazione
FWD).
Se il senso di marcia è sbagliato e/o la frequenza di uscita non presenta correzione,
impostare Pr.359 a valore diverso.
Provare a impostare Pr.376=1 signal loss detection (escludere a 0 se interviene senza
motivo).
Impostare vettoriale e fare autotuning (Pr 9,71, 80, 81, 83, 84)
Fare Autotuning con Pr.96 a 1 (o 101 motore senza meccanica in movimento).
Impostare quindi parametro 800 per vector control in modalità richiesta dall’applicazione.
Attenzione: la frequenza massima di funzionamento in “closed loop” è 120 Hz.
Mitsubishi Electric – Factory Automation - Freqrol inverter
INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
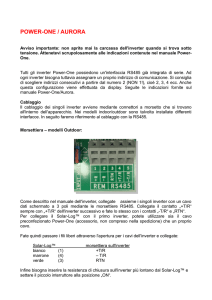
Esempio collegamento line driver differenziale
FR - A7 AP
Differential TTL mode
FR - A7 AP
PLG 1024 - 4096 pulse/revolution
10 V
PA 1
+
-
+
-
SW 2
off
on
(initial status)
+
-
termination
A +5V
PA 2
A
PB 1
B -5V
PB 2
B
PZ 1
Z
PZ 2
_
Z
RS 422
TTL
differential
5V DC
Z phase
combined
with A/B
A
+
-
PG
diff./comp.
(initial status)
SD
PG
SW 1
+ -
SD
External
power supply
5V TTL
Mitsubishi Electric – Factory Automation - Freqrol inverter
B
Z
INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
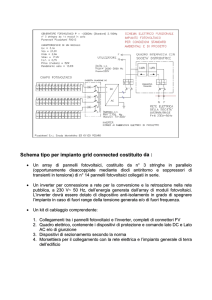
Esempio collegamento open collector complementare
FR - A7 AP
Complementary HTL mode
(Gegentakt/push pull)
FR - A7 AP
PLG 1024 - 4096 pulse/revolution
PA 1
+
-
+
-
SW 2
off
N
PA 2
P
PB 1
P
PB 2
PZ 1
+
-
on
PZ 2
termination
+
-
PG
diff./comp.
SD
PG
SW 1
Mitsubishi Electric – Factory Automation - Freqrol inverter
P
(+/-)
N
+ -
SD
External
power supply
12/15/24 V
N
INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
Parametro per direzione rotazione
A earlier than B cw
Pr. 359 = 1
Mitsubishi Electric – Factory Automation - Freqrol inverter
INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
Parametro per direzione rotazione
B earlier than A cw
Pr. 359 = 0
Mitsubishi Electric – Factory Automation - Freqrol inverter
INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
Parametro impostazione impulsi encoder
Mitsubishi Electric – Factory Automation - Freqrol inverter
INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
Lunghezza massima collegamento encoder
Mitsubishi Electric – Factory Automation - Freqrol inverter
INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
Max pulses per second = 245,76kpps
close loop max frequency = 120Hz
Example with a 2 pole Motor (4 poles)
ns
f 60
P
120 1 s 60
2
3600 1 min
1
120
2 60 s
max pulses _ per _ sec ond ns 1 s PLG _ revolution pulses
60 1 s 4096 pulses
245 ,76 kpps
Mitsubishi Electric – Factory Automation - Freqrol inverter
INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
Calcolo posizionamento
Feedback card considers
positive and negative edge
of A and B phase
Impulsi encoder x giri x 4 = totale retroazione
Esempio:
1024 x 3 x 4 = 12288
upper 4 digits 0001 / lower 4 digits 2288
Step di calcolo:
1024 x 4 =4096
Mezzo giro 2048
3.5 turns = 12288 + 2048 = upper 4 digits 0001 / lower 4 digits 4336
Mitsubishi Electric – Factory Automation - Freqrol inverter
INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
Pr.800=3 posizionamento in Vector Control
Mitsubishi Electric – Factory Automation - Freqrol inverter
INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
Posizionamento da ingressi digitali
Pr.419=0
Mitsubishi Electric – Factory Automation - Freqrol inverter
INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
Posizionamento da ingressi digitali – principio di
funzionamento
Ingressi digitali
forniti ad esempio da
uscite PLC FX3U
Mitsubishi Electric – Factory Automation - Freqrol inverter
INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
Parametri per il posizionamento da ingressi digitali
Mitsubishi Electric – Factory Automation - Freqrol inverter
INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
Timing chart segnali
Mitsubishi Electric – Factory Automation - Freqrol inverter
INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
Segnale di Servo lock – abilitazione fermo in coppia
Se devo impostare ad esempio l‘ingresso RT = servo look (LX)
Pr.183=23
Mitsubishi Electric – Factory Automation - Freqrol inverter
INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
Segnale di in-position – Y36
Range segnalazione
Uscita Run = Segnale di in-position (Y36)
Pr.190=36
Mitsubishi Electric – Factory Automation - Freqrol inverter
INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
Impostazione intervento allarme di posizione E.OD
L‘allarme identifica i droop pulses (differenza tra impulsi di comando e
impulsi di retroazione encoder), al raggiungimento della soglia
interviene l‘allarme E.OD.
Mitsubishi Electric – Factory Automation - Freqrol inverter
INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
Posizionamento a treno di impulsi da ingresso JOG
Pr.419=2
Mitsubishi Electric – Factory Automation - Freqrol inverter
INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
Posizionamento da ingresso JOG – principio di
funzionamento
Comando a treno di
impulsi fornito ad
esempio da
istruzione DRVI da
PLC FX3U
Mitsubishi Electric – Factory Automation - Freqrol inverter
INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
Esempio di
collegamento
asse elettrico
Mitsubishi Electric – Factory Automation - Freqrol inverter
INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
Tipi di encoder - generalità
Mitsubishi Electric – Factory Automation - Freqrol inverter
INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
Mitsubishi Electric – Factory Automation - Freqrol inverter
INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER /// INVERTER
Mitsubishi Electric – Factory Automation - Freqrol inverter