7
Capitolo 2 – Motori e generatori per gruppi elettrogeni
2.1 Introduzione
In questo capitolo si prendono in esame i motori ed i generatori che equipaggiano i gruppi
elettrogeni. Si ritiene opportuno analizzare questi componenti, poiché sono i soggetti che
determinano le prestazioni dell’intero complesso; la conoscenza delle loro caratteristiche e delle
loro peculiarità è fondamentale per comprendere ed individuare quali sono e possono essere le
performance dei gruppi elettrogeni.
La trattazione che segue è svolta singolarmente per i motori e per i generatori, ma è del tutto
equivalente dal punto di vista logico. Nella prima parte si procede alla classificazione delle
macchine, secondo la suddivisione per gamme di potenza, soffermando poi l’attenzione alle
caratteristiche dei motori e dei generatori per ogni singola fascia. Per agevolare il lettore, vengono
presentate delle tabelle riassuntive dei dati caratteristici, al fine di semplificarne la comprensione ed
il confronto.
Alcuni argomenti specifici sono illustrati con propri paragrafi, mentre altri sono ripresi e
discussi all’interno della stessa classificazione, poiché sono di più stretta pertinenza con alcune
gamme di potenza.
In un paragrafo a sé stante, a conclusione del capitolo, si analizzano le metodologie di
accoppiamento tra motore e generatore.
2.2 Motori per gruppi elettrogeni
2.2.1 Classificazione dei motori
I gruppi elettrogeni per applicazioni terrestre possono essere allestiti:
con motori alternativi ad accessione comandata;
con motori alternativi ad accensione per compressione;
con turbine a gas.
La scelta del tipo di motore da utilizzare per il gruppo elettrogeno è influenzata da una serie di
fattori fra loro interagenti. Il primo in ordine di importanza è dato dalla potenza che il gruppo
elettrogeno deve generare: ogni tipologia di motore copre una certa gamma di potenza e, di
conseguenza, esistono sul mercato specifici motori per fasce proprie di erogazione. In tal senso si
Emilio Giomo
Capitolo 2. Motori e generatori per gruppi elettrogeni
8
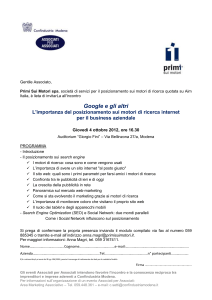
rende opportuno suddividere i motori secondo la classificazione precedentemente introdotta e
riassunta dal diagramma di Figura 2.1.
Gruppi
elettrogeni
Potenza GE
piccolissima
potenza
1 ≤ P < 7 kWe
medio - piccola
potenza
7 ≤ P < 25 kWe
medio - grande
potenza
25 ≤ P ≤ 800 kWe
grande
potenza
> 800 kWe
a benzina
Motori alternativi
a gas
a gasolio
a gas
Turbine
Figura 2.1 Classificazione dei motori primi
Il secondo fattore, in realtà un insieme omogeneo di elementi, che determina la scelta del
motore è vincolato alla destinazione d’uso del gruppo elettrogeno. La trasportabilità, la
maneggevolezza, il consumo del carburante, gli obblighi di carattere normativo, la disponibilità di
particolari combustibili, il tipo di servizio che deve svolgere il gruppo elettrogeno, sono elementi
che incidono in modo rilevante sulla scelta del motore. Ad esempio, nell’allestimento di gruppi
elettrogeni trasportabili è preferibile l’uso di motori a benzina, poiché, in questo caso, il fattore peso
è predominante rispetto a tutti gli altri ed il motore a benzina è, appunto, meno pesante rispetto ad
un motore diesel di pari potenza. Altro esempio è l’installazione di gruppi elettrogeni sul tetto: essa
non è consentita, se non tramite opportune deroghe, per gruppi elettrogeni con motore a gasolio,
mentre è concessa per macchine alimentate a gas metano.
E’ di fondamentale importanza, pertanto, conoscere le caratteristiche dei motori presenti sul
mercato per poter essere in grado di effettuare una corretta scelta. A tal fine si analizzano, nei
paragrafi a seguire, le proprietà dei motori seguendo lo stesso filo logico richiamato
precedentemente. Ai motori alternativi a gas e alle turbine è dedicato un breve accenno con
paragrafi dedicati, poiché trattasi di macchine il cui utilizzo nel campo della generazione è limitato
a casi particolari. Si ritiene opportuno in questa sede dare risalto alle macchine delle gamme di
medio - grande e di grande potenza, in quanto sono quelle di maggior diffusione e di grande
rilevanza dal punto di vista applicativo.
Prima della esposizione delle varie tipologie di motori si analizzerà l’argomento della
regolazione del numero di giri che è comune a tutte le fasce di erogazione.
Emilio Giomo
Capitolo 2. Motori e generatori per gruppi elettrogeni
9
2.2.2 La regolazione del numero di giri
Il motore primo deve funzionare ad un regime di giri costante in modo da mantenere la
frequenza ad un valore fisso di 50 o 60 Hz. Infatti, la frequenza è legata al numero di giri con la
relazione
f
n p
[ Hz ]
60
dove n è il numero di giri in [giri/min] e p è il numero di coppie polari dell’alternatore.
Una qualsiasi variazione della coppia resistente all’albero del motore provoca un mutamento
del suo numero di giri. Per riportare il motore al regime di rotazione precedente è necessario
riequilibrare il sistema con una coppia motrice equivalente: questa può essere variata modificando
la portata del combustibile all’interno dei cilindri, cioè agendo sul dispositivo di mandata. Quindi,
per assicurare il funzionamento a giri costanti, il motore deve essere provvisto di un sistema
automatico che provvede alla sua regolazione. Per questo motivo i motori sono dotati di regolatore
automatico del numero di giri che agisce sul sistema di alimentazione del combustibile,
aumentandone o diminuendone la relativa portata.
I regolatori si possono distinguere in due classi: regolatori meccanici e regolatori elettronici. I
regolatori meccanici si basano sul principio delle masse rotanti, il cui settaggio è effettuato
mediante la messa in tensione di apposite molle: la precisione e il tempo di risposta del sistema
sono influenzate dai giochi, dagli attriti, dalle tolleranze e dall’inerzia dei dispositivi costituenti il
regolatore e, solitamente, sono molto più ampie rispetto ai sistemi elettronici. Quest’ultimi essendo
privi di organi meccanici (a parte l’attuatore che agisce direttamente sul dispositivo di mandata del
combustibile) hanno precisione e tempi di risposta molto contenuti. In linea del tutto indicativa, i
regolatori elettronici sono montati di serie sui motori aventi potenza maggiore di 130 kWm.
Lo statismo dei regolatori di velocità è normalmente del 5% per i regolatori meccanici, mentre è
regolabile nei regolatori elettronici. Per quest’ultimi, la funzione dello statismo viene esclusa
quando il gruppo elettrogeno funziona in isola e, pertanto, il funzionamento della macchina è
praticamente isocrono, cioè a frequenza costante per tutto il campo di erogazione, da zero alla
potenza nominale. Nei regolatori meccanici lo statismo è fisso, cioè è presente sia che la macchina
funzioni in isola sia in parallelo con la rete.
La scelta del regolatore è funzione della precisione richiesta dal carico nei confronti della
frequenza. Se l’utenza richiede una elevata precisione, il sistema di regolazione di giri deve essere
elettronico, mentre negli altri casi può essere meccanico.
La taratura del numero di giri del motore è effettuata direttamente dal costruttore del gruppo, in
funzione dello statismo del regolatore di velocità. Durante le prove a vuoto e quelle a carico viene
Emilio Giomo
Capitolo 2. Motori e generatori per gruppi elettrogeni
10
verificata e regolata la velocità (frequenza), affinché alla potenza nominale corrisponda un regime
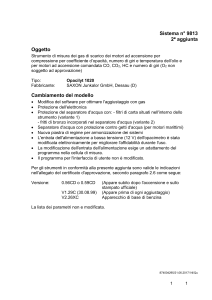
di giri equivalente alla frequenza nominale (50 Hz o 60 Hz). Ad esempio per un gruppo elettrogeno
allestito con un alternatore a quattro poli (p=2) e un motore con regolatore di giri con uno statismo
del 5%, è necessario regolare la velocità a vuoto a 1575 giri/min - 52.5 Hz, in modo che, al 100%
della potenza nominale, si abbia una frequenza di 50 Hz - 1500 giri/min (Figura 2.2). Alle
condizioni intermedie di carico, tra zero e il 100% della potenza nominale, il gruppo elettrogeno
funzionerà ad una frequenza compresa tra i 52.5 Hz e i 50 Hz.
Nel funzionamento isocrono la frequenza rimane costante per qualsiasi valore del carico
applicato al motore; la retta dello statismo, nel grafico velocità – potenza, è parallela all’asse delle
ascisse e posizionata ad una valore pari alla velocità (frequenza) nominale.
Velocità 1600
[giri/min]
1580
1560
Statismo 5%
1540
1520
Statismo 0% (isocrono)
1500
1480
1460
0
10
20
30
40
50
60
70
80
90
100
Potenza attiva in % della nominale
Figura 2.2 Andamento della velocità in funzione della potenza generata dal motore
per uno statismo del 5% e del 0% (funzionamento isocrono)
Nel caso di collegamento in parallelo alla rete, la frequenza è imposta dalla rete stessa che viene
immaginata equivalente ad un generatore di potenza infinita. Pertanto, il gruppo elettrogeno deve
funzionare ad una frequenza fissa e non è ammissibile, nelle varie condizioni di carico, una
frequenza diversa dalla nominale. Questo implica che il numero di giri deve essere tarato con
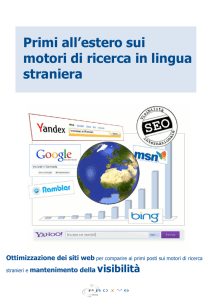
continuità, al variare del carico applicato all’asse del motore. Riprendendo l’esempio precedente e
tenendo presente che lo statismo conserva lo stesso andamento per qualsiasi riferimento della
velocità a vuoto, mantenere la velocità (frequenza) ad un valore costante significa dover traslare la
retta dello statismo parallelamente a se stessa. In poche parole, il mantenere costante la frequenza ai
vari regimi di carico significa aumentare o diminuire il riferimento della velocità a vuoto (Figura
2.3). Ad esempio, per ottenere una frequenza di 50 Hz all’80% della potenza nominale, è necessario
Emilio Giomo
Capitolo 2. Motori e generatori per gruppi elettrogeni
11
che la velocità a vuoto sia regolata a circa 1560 g/min, mentre al 25% della potenza nominale la
velocità a vuoto deve essere di circa 1520 g/min.
1600
Velocità
[giri/min] 1580
Statismo 5%
1560
1540
1520
1500
80% di Pn
25% di Pn
1480
1460
1440
1420
1400
0
10
20
30
40
50
60
70
80
90
100
Potenza attiva in % della nominale
Figura 2.3 Regolazione del riferimento della velocità a vuoto in funzione della potenza generata per la gestione del
parallelo tra la rete e un motore dotato di regolatore con statismo del 5%
La regolazione della velocità a vuoto consente di ripartire il carico tra la rete ed il gruppo
elettrogeno. La gestione della ripartizione del carico viene effettuata da dispositivi automatici che,
oramai, sono quasi esclusivamente di tipo elettronico.
2.2.3 Motori alternativi
2.2.3.1 Motori alternativi per gruppi elettrogeni di piccolissima potenza
I motori disponibili per questa gamma di potenza possono essere a benzina, a due o quattro
tempi, o a gasolio. Il tipo di alimentazione influisce sulla destinazione d’uso del gruppo elettrogeno:
ad esempio, negli allestimenti di gruppi elettrogeni trasportabili trovano largo impiego i motori a
benzina a quattro tempi, poiché hanno un peso ed una emissione sonora limitati rispetto ai motori a
gasolio. Nelle applicazioni di emergenza, invece, è preferibile l’utilizzo di motori diesel, perché
hanno una maggior affidabilità nell’avviamento a freddo.
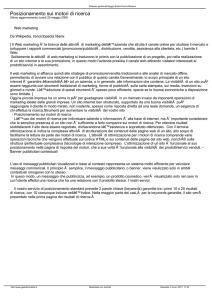
In ambo i casi i motori sono generalmente equivalenti per quanto riguarda la costruzione e
dotazione standard fornita dai vari costruttori: sono solitamente monocilindrici, ad aspirazione
naturale, raffreddati ad aria, funzionanti ad un regime di rotazione di 3000 giri/min e dotati di
avviamento manuale con autoavvolgente, per motori a benzina, e avviamento elettrico per i motori a
Emilio Giomo
Capitolo 2. Motori e generatori per gruppi elettrogeni
12
gasolio (il sistema manuale con autoavvolgente è equivalente a quello montato sui motori dei
tosaerba).
a.
b.
Figura 2.4 Motori per gruppi elettrogeni di piccolissima potenza: a. a benzina b. a gasolio
I motori sono allestiti con regolatore automatico del numero di giri e con presa di moto conica
per l’accoppiamento con il generatore.
Le caratteristiche di questi motori sono in sintesi:
un rapporto peso/potenza all'incirca di 5 kg/kWm e 9 kg/kWm, rispettivamente per motori
a benzina e per motori a gasolio;
una irregolarità ciclica piuttosto elevata (i motori sono monocilindrici e non sono dotati
di volano smorzatore);
una regolazione del numero di giri con elevato statismo (≥ 5%);
una presa di carico limitata al 70 % della potenza nominale;
una emissione sonora contenuta entro i 70 dB(A) a 7 metri, per motori a benzina, e di 85
dB(A) a 7 metri per i motori a gasolio;
una elevata sensibilità alle condizioni ambientali di funzionamento, per i motori a
benzina, mentre quelli a gasolio sono meno suscettibili alle variazioni di temperatura,
umidità relativa e pressione atmosferica;
una mediocre affidabilità nell’avviamento a freddo dei motori a benzina;
un consumo del carburante relativamente elevato nei motori a benzina.
Come si desume, sulla scelta del motore pesa la sua alimentazione. I motori a benzina si
addicono ai casi in cui è necessario una sorgente di energia trasportabile e poco rumorosa, mentre
sono da evitare le loro applicazioni per gruppi di emergenza, date le loro difficoltà di avviamento a
freddo. Sono da preferirsi i motori a gasolio quando è necessario una sorgente di energia stazionaria
e/o di emergenza, sia per il buon comportamento nell’avviamento a freddo che per il ridotto
consumo di carburante.
Emilio Giomo
Capitolo 2. Motori e generatori per gruppi elettrogeni
13
In generale, i gruppi elettrogeni allestiti con questi motori non sono indicati per l’alimentazione
di circuiti che richiedono condizioni restrittive nella precisione in frequenza e pulizia della forma
d’onda di tensione.
In Figura 2.5 sono riassunte le caratteristiche principali dei motori di questa gamma di potenza.
Motori per gruppi
elettrogeni di
piccolissima
potenza
1 ≤ P < 7 kWe
Motori
benzina
gasolio
Numero di giri [giri/min]:
3000
3000
Raffreddamento:
aria
aria
Aspirazione:
Naturale
Naturale
Irregolarità ciclica:
elevata
elevata
≤ 70% Pn
≤ 70% Pn
Statismo regolatore velocità:
≥ 5%
≥ 5%
Precisione regolatore di velocità:
≥ 2%
≥ 2%
elevata
media
Peso/potenza [kg/kWm]:
~5
~9
Emissione sonora [dB(A) a 7 m]:
< 70
< 85
scarso
buono
350 ÷ 400
250 ÷ 280
Presa di carico:
Sensibilità alle condizioni ambientali:
Avviamento a freddo:
Consumo carburante [g/kWmh]:
Figura 2.5 Prestazioni dei motori per gruppi elettrogeni di piccolissima potenza
2.2.3.2 Motori alternativi per gruppi elettrogeni di medio - piccola potenza
I motori disponibili sul mercato per le applicazioni comprese tra i 7 kWe e i 25 kWe sono quasi
esclusivamente a gasolio. Si ritiene poco significativa, in questo contesto, l’analisi dei motori a
benzina, poiché il loro utilizzo è limitato a qualche unità.
In questa gamma si distinguono due tipologie di motori: a 1500 giri/min e a 3000 giri/min.
Questi ultimi sono utilizzati quando si devono contenere le dimensioni ed il peso del gruppo
elettrogeno, poiché generano una potenza meccanica superiore, a parità di cilindrata, rispetto a
quelli a 1500 giri/min. Per contro, le macchine a 3000 giri/min sono soggette ad una maggior usura
ed hanno una maggiore emissione sonora; pertanto, non sono adatte ai casi dove sono richieste
rumorosità contenute (< 70 dB(A) a 7 m) e dove è necessario un funzionamento continuo della
sorgente di energia (ad esempio alimentazione di utenze in zone non elettrificate).
Emilio Giomo
Capitolo 2. Motori e generatori per gruppi elettrogeni
14
Anche in questa gamma i motori sono generalmente equivalenti nella loro costruzione e nella
loro dotazione standard. Essi sono pluricilindrici con disposizione in linea, normalmente ad
aspirazione naturale, raffreddati ad aria o ad acqua e dotati di avviamento elettrico, di regolatore
automatico del numero di giri e di presa di moto con volano per l’accoppiamento con il generatore.
Le caratteristiche di questi motori sono in sintesi (vedi anche Figura 2.6):
un rapporto peso/potenza di circa 8 e 13 kg/kWm, rispettivamente per macchine a 3000
giri/min e per macchine a 1500 giri/min;
una irregolarità ciclica piuttosto elevata nei motori a 1500 giri/min (i motori hanno un
numero di cilindrici limitato con poche fasi attive nell’unità di tempo);
una regolazione del numero di giri con elevato statismo (≤ 5%);
una presa di carico limitata all’80 % della potenza nominale;
una emissione sonora di circa 80 dB(A) a 7 metri, per motori a 1500 giri/min, mentre
superiore agli 80 dB(A) a 7 metri per i motori a 3000 giri/min;
una buona affidabilità nell’avviamento a freddo (nei motori a 3000 giri/min risulta più
critico il raggiungimento del regime termico);
un consumo del carburante relativamente elevato nei motori a 3000 giri/min.
Motori per gruppi
elettrogeni di
medio - piccola
potenza
7 ≤ P < 25 kWe
Motori a gasolio
3000 giri/min
1500 giri/min
aria o acqua
aria o acqua
Naturale o Sovralimentata
Naturale o Sovralimentata
ridotta
elevata
≤ 80 % Pn
≤ 80 % Pn
≤ 5%
≤ 5%
Precisione regolatore di velocità:
2%
2%
Peso/potenza [kg/kWm]:
~8
~ 13
Emissione sonora [dB(A) a 7 m]:
> 80
≤ 80
buono
buono
245 ÷ 265
225 ÷ 245
Raffreddamento:
Aspirazione:
Irregolarità ciclica:
Presa di carico:
Statismo regolatore di velocità:
Avviamento a freddo:
Consumo carburante [g/kWmh]:
Figura 2.6 Prestazioni dei motori per gruppi elettrogeni di medio - piccola potenza
Emilio Giomo
Capitolo 2. Motori e generatori per gruppi elettrogeni
15
Dai questi dati si deducono quali possono essere i campi applicativi delle due tipologie di
motori: quelli a 3000 giri/min si prestano per essere allestiti su gruppi elettrogeni a cui è richiesto
un funzionamento saltuario (gruppi elettrogeni di emergenza), oppure dove il fattore
peso/dimensioni è la caratteristica predominante rispetto a tutte le altre e, ancora, dove l’emissione
sonora non costituisce un problema; in tutti gli altri casi è consigliato l’utilizzo di motori a 1500
giri/min.
2.2.3.3 Motori alternativi per gruppi elettrogeni di medio-grande e grande potenza
In queste gamme sono presenti esclusivamente motori alimentati a gasolio funzionanti a 1500
giri/min. Risultano tecnicamente improponibili macchine a 3000 giri/min, per le notevoli
sollecitazioni dovute alle forze centrifughe che si genererebbero sugli avvolgimenti dei generatori e
sulle masse rotanti degli stessi motori. Essi sono pluricilindrici con disposizione in linea o a V,
raffreddati ad acqua, dotati di avviamento elettrico, di regolatore automatico del numero di giri e di
presa di moto con albero corredato di volano per l’accoppiamento con il generatore.
Anche in questa classe di macchine si può stilare una classificazione dei motori. L’elemento
che genera la suddivisione in queste gamme di potenza è il tipo di aspirazione: essa influenza in
modo determinante le prestazioni dei motori in termini di potenza erogata, di consumo del
carburante e di presa di carico. Si distinguono, così, tre tipologie di macchine:
motori ad aspirazione naturale;
motori ad aspirazione sovralimentata;
motori ad aspirazione sovralimentata ed interrefrigerata.
Il dato oggettivo da cui si rileva questa distinzione è la pressione media effettiva (pme). Infatti,
ogni tipo di aspirazione è caratterizzato da un valore di pme massimo raggiungibile, che determina,
di conseguenza, le massime prestazioni fornibili dal motore. La potenza utile generata dal motore è
calcolabile, per l’appunto, mediante la relazione:
Pu pme Vtot
n
[kW ]
m
dove
-
pme è la pressione media effettiva misurata in [MPa];
-
Vtot è la cilindrata del motore in [dm3]
-
n è il numero di giri del motore (gruppo elettrogeno) in [giri/s];
-
m è il numero di giri necessario per compiere un ciclo (2 per i motori a quattro tempi).
Emilio Giomo
Capitolo 2. Motori e generatori per gruppi elettrogeni
16
Essendo il numero di giri costante, la pme fornisce, a meno del fattore
n
, l’indicazione della
m
potenza specifica per unità di cilindrata:
pme k
Pu kW
Vtot dm3
Nel caso specifico di macchine a quattro tempi e funzionanti a 1500 g/min, il fattore
n
è pari a
m
12.5.
La pme è definita anche come rapporto tra il lavoro utile e la cilindrata, cioè:
pme
Lu
Hi
u v a
Vtot
dove
-
ηu è il rendimento utile del ciclo di lavoro del motore (rapporto tra il lavoro utile per ciclo
e l’energia introdotta, intesa come prodotto tra la massa di combustibile introdotto per
ciclo e il suo potere calorifico);
-
λv è il coefficiente di riempimento d’aria dei cilindri (rapporto tra massa d’aria comburente
aspirata per ciclo e una massa d’aria di riferimento, assunta pari al prodotto della densità
dell’aria nell’ambiente di aspirazione e il volume);
-
ρa è la densità dell’aria nei condotti di aspirazione;
-
Hi è il potere calorifico inferiore del combustibile (per il gasolio è pari a 42.5 MJ/kg);
-
α è la dosatura della miscela di aria e combustibile (rapporto tra massa d’aria comburente
per ciclo e la massa di combustibile per ciclo).
Assumendo, per semplicità, costanti la dosatura, il rendimento utile e il potere calorifico, si
desume che la pme è direttamente proporzionale al coefficiente di riempimento e alla densità
dell’aria nei condotti di aspirazione. Pertanto, per aumentare la pme, e conseguentemente la potenza
dei motori, è necessario aumentare la quantità d’aria comburente all’interno dei cilindri e la
pressione nei collettori di aspirazione. Questo è ottenibile con un sistema di compressione dell’aria
comburente, cioè con la sovralimentazione e con l’aggiunta, eventuale, del raffreddamento dell’aria
compressa (interrefrigerazione).
Questioni tecniche ed operative limitano verso l’alto i valori raggiungibili dai parametri
sopraindicati e, quindi, per ogni specifica modalità di aspirazione, sono ottenibili dei valori tipici
della pme. Dalla consultazione dei cataloghi si può desumere quanto segue:
per motori ad aspirazione naturale la pme massima è circa di 0.8 MPa;
per motori ad aspirazione sovralimentata la pme massima è circa di 1.5 MPa;
Emilio Giomo
Capitolo 2. Motori e generatori per gruppi elettrogeni
17
per motori ad aspirazione sovralimentata ed interrefrigerata la pme può raggiungere i 2.5
MPa;
Sulla base dei valori espressi, si ricava una potenza specifica pari:
a circa 10 kW/dm3 per motori ad aspirazione naturale;
a circa 18 kW/dm3 per motori ad aspirazione sovralimentata;
a circa 30 kW/dm3 per motori ad aspirazione sovralimentata ed interrefrigerata.
Come si nota, a parità di cilindrata, un motore sovralimentato ed interrefrigerato può generare
una potenza tripla rispetto ad un motore ad aspirazione naturale. Come si vedrà in seguito questo va
a discapito delle prestazioni in transitorio, per effetto dell’elevato tempo di ripristino delle
condizioni di regime del sistema di aspirazione.
L’interrefrigerazione dell’aria comburente può essere effettuata in due modi: ad aria o ad acqua.
Nel primo caso la refrigerazione è effettuata mediante uno scambiatore di calore posto sul radiatore
del motore: l’aria che lambisce il radiatore per il raffreddamento del motore, provvede anche alla
refrigerazione dell’aria comburente (scambiatore aria-aria). Nel secondo caso, invece, l’aria
comburente viene raffreddata da uno scambiatore di calore in cui viene fatta circolare la stessa
acqua di raffreddamento del motore (scambiatore aria-acqua). Il primo sistema risulta
particolarmente efficiente, consentendo di ottenere pressioni medie effettive sensibilmente più
elevate rispetto al secondo.
Motori per gruppi
elettrogeni di
medio - grande
potenza
25 ≤ P ≤ 800 kWe
grande
potenza
> 800 kWe
naturale
Aspirazione
sovralimentata
sovralimentata ed interrefrigerata
TCA
TCW
Legenda:
TCA = aspirazione sovralimentata ed interrefrigerata aria-aria;
TCW = aspirazione sovralimentata ed interrefrigerata aria-acqua;
Figura 2.7 Classificazione dei motori per gruppi elettrogeni di medio – grande e grande potenza
Il consumo del combustibile diminuisce all’aumentare della pressione media effettiva, in virtù
del miglioramento del rendimento utile ηu. Infatti, se si confrontano motori di pari potenza, ma con
Emilio Giomo
Capitolo 2. Motori e generatori per gruppi elettrogeni
18
pme diverse, risulta che il motore con pme più alta ha un consumo del combustibile più basso.
Questo può essere constatato analizzando l’espressione del consumo combustibile:
qb
1
u H i
essendo il rendimento utile ηu dato dal prodotto del rendimento del ciclo limite ηlim, del rendimento
termofluidodinamico interno ηTi e dal rendimento organico ηo. Assumendo, in prima ipotesi,
costanti sia il rendimento del ciclo limite sia il rendimento termofluidodinamico interno, si ha che il
rendimento utile è proporzionale al rendimento organico. Questo tiene conto delle perdite
meccaniche insite al motore, cioè, in prima istanza, dalla cilindrata. Pertanto, i motori con bassa
cilindrata, a parità di potenza erogata, hanno un rendimento organico più alto e quindi un maggior
rendimento utile. In conclusione, all’aumentare della pressione media effettiva diminuisce il
consumo del combustibile (vedi dati riportati nella Figura 2.10).
Il valore della pme, oltre a fornire un’indicazione sulla potenza specifica delle macchine, è un
buon indice delle prestazioni dei motori nei confronti della presa di carico. Questa è una fase molto
delicata del funzionamento di un motore e si verifica ogniqualvolta si presenta una variazione
repentina della coppia resistente (variazione di carico assorbito dall’utenza). Per riportare il motore
alla velocità nominale, il regolatore di giri provvede ad aumentare o diminuire il flusso del
combustibile per il sistema di alimentazione che, a sua volta, lo inietta all’interno dei cilindri. Nello
stesso tempo, perché avvenga la combustione, deve confluire la giusta quantità di aria comburente,
che viene convogliata mediante il sistema di aspirazione. Questo processo ha un tempo di risposta
superiore a quello della catena regolazione di giri - iniezione del combustibile e, quindi, le
prestazioni del motore, nel transitorio, sono fortemente dipendenti dalla tipologia di aspirazione
dell’aria comburente.
In particolare gli elementi che hanno influenza nel comportamento in transitorio sono: la
lunghezza dei condotti di aspirazione, il sistema di interrefrigerazione dell’aria comburente, il
sistema di sovralimentazione. In realtà i primi due fattori sono fra loro correlati: con
l’interrefrigerazione aria-aria si deve inviare l’aria comburente, una volta compressa, verso il
radiatore e, successivamente, da questo convogliarla verso i cilindri; con l’interrefrigerazione ariaacqua, invece, lo scambiatore di calore è posto a bordo del motore e direttamente collegato al
collettore di aspirazione (vedi Figura 2.8 e Figura 2.9). Pertanto, nel secondo caso, l’aria percorre
un tragitto che è meno della metà del primo, con la conseguenza che il motore con
interrefrigerazione aria-acqua ha un tempo di risposta più breve.
Emilio Giomo
Capitolo 2. Motori e generatori per gruppi elettrogeni
19
Aria aspirata
Gas combusti
Turbocompressore
Aria compressa
refrigerata dal radiatore
Aria compressa da refrigerare
per il radiatore
Figura 2.8 Motore ad aspirazione sovralimentata ed interrefrigerata aria-aria (TCI)
Aria aspirata
Gas combusti
Turbocompressore
Scambiatore
aria-acqua
Figura 2.9 Motore ad aspirazione sovralimentata ed interrefrigerata aria-acqua (TCW)
Le prestazioni sulla presa di carico dei motori si possono individuare, in linea di massima,
confrontando la pme, corrispondente alla potenza nominale, con alcuni valori di riferimento. In base
a prove eseguite dal sottoscritto, e a quanto indicato dai vari costruttori di motori, si possono fissare
i seguenti limiti:
motori per gruppi elettrogeni da 25 a 800 kWe:
o per deviazioni di velocità tra il 5% ed il 10% della nominale il massimo carico
inseribile a gradino è corrispondente ad una pme pari a 1.2 MPa;
o per deviazioni di velocità tra il 10% ed il 15% della nominale il massimo carico
inseribile a gradino è corrispondente ad una pme pari a 1.3 MPa;
Emilio Giomo
Capitolo 2. Motori e generatori per gruppi elettrogeni
20
motori per gruppi elettrogeni superiori a 800 kWe:
o ad aspirazione TCA:
per deviazioni di velocità entro il 10÷15% della nominale il massimo
carico inseribile a gradino è corrispondente ad una pme pari a 0.8 MPa;
per deviazioni di velocità entro il 15÷20% della nominale il massimo
carico inseribile a gradino è corrispondente ad una pme pari a 1.0 MPa;
o ad aspirazione TCW:
per deviazioni di velocità entro il 10÷15% della nominale il massimo
carico inseribile a gradino è corrispondente ad una pme pari a 1 MPa;
per deviazioni di velocità entro il 15÷20% della nominale il massimo
carico inseribile a gradino è corrispondente ad una pme pari a 1.2 MPa.
La distinzione tra le due fasce di potenza è determinata dalla struttura dei motori. In particolare,
i motori per gruppi elettrogeni superiori agli 800 kWe sono caratterizzati da grandi masse rotanti e
notevoli dimensioni che compromettono il loro comportamento nel regime dinamico. Per questo le
loro prestazioni sono peggiorative rispetto ai motori della fascia tra i 25 ed i 800 kW e. Naturalmente
i valori indicati non hanno la presunzione di scientificità, ma forniscono, in linea di principio, una
base su cui valutare le prestazioni dei motori a riguardo della presa di carico.
Nella Figura 2.10 vengono riassunti i dati caratteristici dei motori di queste gamme di potenza.
Motori per gruppi
elettrogeni di
medio - grande
potenza
25 ≤ P ≤ 800 kWe
Raffreddamento:
Aspirazione:
Pressione media effettiva [MPa]:
Potenza specifica [kW/dm3]:
Presa di carico:
grande
potenza
> 800 kWe
acqua
acqua
acqua
acqua
NA
TC
TCA-TCW
TCA-TCW
≤ 0.8
≤ 1.5
≤ 2.5
≤ 2.5
10
18
30
30
100 % Pn
70 % Pn
50 % Pn
≤ 50 % Pn
Statismo regolatore di velocità:
≤5% - 0% ≤5% - 0% ≤5% - 0%
0%
Precisione regolatore di velocità:
2% - 0.5% 2% - 0.5% 2% - 0.5%
0.5%
Peso/potenza [kg/kW]:
Emissione sonora [dB(A) a 7 m]:
Avviamento a freddo:
Consumo carburante [g/kWh]:
10
5÷8
3.5 ÷ 5
3.5 ÷ 4.5
≥ 85
≥ 85
≥ 85
≥ 85
buono
buono
buono
buono
225 ÷ 245 210 ÷ 225 200 ÷ 210
190 ÷ 205
Figura 2.10 Prestazione dei motori per gruppi elettrogeni di medio – grande e grande potenza
2.2.3.4 Motori alternativi a gas
Emilio Giomo
Capitolo 2. Motori e generatori per gruppi elettrogeni
21
I motori alternativi a gas derivano costruttivamente dai motori diesel. Infatti, sono allestiti con
lo stesso monoblocco, lo stesso albero motore, la stessa struttura di fissaggio e vengono modificati
opportunamente in alcune loro parti per essere adattati al tipo di combustibile utilizzato.
Naturalmente queste macchine devono essere provviste di alcuni sistemi caratteristici dei
motori ad accensione comandata; infatti, sono dotati di un apparato di accensione, con candela e
bobina per ogni cilindro, e di un sistema di carburazione che provvede alla corretta miscelazione tra
gas e l’aria comburente.
Le testate sono completamente diverse da quelle dei motori diesel. Infatti, oltre la necessità
della candela come elemento di accensione, abbisognano di una camera di scoppio con una
conformazione tipica dei motori a scoppio. I rapporti di compressione, inoltre, sono notevolmente
inferiori rispetto a quello dei motori diesel, per evitare il fenomeno della detonazione (10÷12:1 dei
motori a gas contro i 14÷19:1 dei motori diesel).
Il costo dei motori a gas, a parità di potenza erogata, è sensibilmente più grande rispetto a
quello dei motori diesel. Infatti, la loro ridotta produzione unita ai limiti tecnici di potenza
ottenibile, sono elementi che determinano l’incremento dei costi, che oscillano tra il 50% ed il
100% dei motori diesel. Il loro utilizzo è limitato ai casi dove la convenienza del gas, rispetto il
gasolio, determina un ritorno economico, cioè laddove si hanno grandi consumi di combustibile. Per
questo il loro campo di utilizzo è limitato alla cogenerazione, dove il gruppo elettrogeno lavora per
molte ore all’anno.
I motori a gas non sono adatti per le tipiche applicazioni dei gruppi elettrogeni. Infatti, sono
particolarmente sensibili alle variazioni delle condizioni ambientali (problemi legati alla
carburazione), hanno difficoltà nell’avviamento a freddo e non possiedono grandi capacità di presa
del carico; è sconsigliabile il loro utilizzo per gruppi elettrogeni di emergenza o per macchine che
devono sottostare a continue variazioni di temperatura ed umidità (ad esempio gruppi elettrogeni
carrellati che possono essere spostati da un sito all’altro). Per contro, hanno una minor emissione
sonora rispetto ai diesel e, se adeguatamente tarati, emettono minor inquinanti in atmosfera. E’
chiaro, quindi, che i motori a gas sono particolarmente adatti per il funzionamento continuo a carico
costante cioè, per l’appunto, per la cogenerazione con il gruppo elettrogeno in parallelo alla rete.
Emilio Giomo
Capitolo 2. Motori e generatori per gruppi elettrogeni
22
Figura 2.11 Motore a gas da 1042 kWm
Nella Figura 2.12 vengono riassunti i dati caratteristici dei motori alternativi a gas.
Motori alternativi
a gas
Raffreddamento:
acqua
Aspirazione:
NA – TC – TCA/W
Rapporto di compressione:
12:1 gas naturale
10:1 gas propano
Pressione media effettiva [MPa]:
≤ 1.5
Potenza specifica [kWm/dm3]:
9 ÷ 18
Presa di carico:
Statismo regolatore di velocità:
Peso/potenza [kg/kWm]:
Emissione sonora [dB(A) a 7 m]:
Avviamento a freddo:
Consumo carburante [kJ/kWms]:
≤ 20 % Pn
0
5.5 ÷ 9
≤ 85
scarso
2.40 ÷ 2.90
Figura 2.12 Dati caratteristici e prestazioni dei motori a gas
2.2.4 Motori a turbina a gas
Le turbine a gas hanno una diffusione limitata nel campo dei gruppi elettrogeni. Trovano
impiego in specifici ambiti, quali la cogenerazione, oppure laddove sono richieste elevate
concentrazioni di energia e ridotte vibrazioni. Infatti, le turbine a gas sono caratterizzate da un
rapporto peso/potenza molto contenuto e funzionano a regimi di rotazione più elevati rispetto a
quelli dei motori alternativi. Per contro, la loro ridotta efficienza elettrica, la sensibilità alle
Emilio Giomo
Capitolo 2. Motori e generatori per gruppi elettrogeni
23
condizioni ambientali e il difficoltoso raggiungimento delle condizioni di regime, fanno sì che il
loro utilizzo non sia adatto alle tipiche applicazioni dei gruppi elettrogeni.
Le turbine a gas coprono una gamma di potenza dalla centinaia di kWe alla centinaia di MWe.
Ultimamente sono proposte soluzioni di microturbine dell’ordine delle decine di kWe, non
trovando, comunque, una diffusione apprezzabile per la loro difficoltosa gestione e conduzione.
Nella Figura 2.13 è riportato l’andamento della potenza in funzione della temperatura ambiente
e un tipico accoppiamento tra turbina e generatore. Nella Figura 2.14 sono riportati sinteticamente i
dati caratteristici delle turbine a gas utilizzate nell’ambito della generazione elettrica.
a.
b.
Figura 2.13 a. Andamento della potenza erogata in funzione della temperatura ambiente
b. Accoppiamento turbina-generatore
(Fonte: KAWASAKI Gas Turbine Europe GmbH)
Motori a turbina
a gas
Potenza [MWm]:
0.1 ÷ 100
Presa di carico:
scarsa
Statismo regolatore di velocità:
Precisione regolatore di velocità:
Peso/potenza [kg/kWm]:
Emissione sonora [dB(A) a 7 m]:
Avviamento a freddo:
Consumo carburante [kJ/kWms]:
0%
±0.25%
10 ÷ 2
≤ 85
scarso
5÷3
Figura 2.14 Dati caratteristici e prestazioni delle turbine a gas
Emilio Giomo
Capitolo 2. Motori e generatori per gruppi elettrogeni
24
2.3 Generatori per gruppi elettrogeni
2.3.1 Classificazione dei generatori
I gruppi elettrogeni possono essere allestiti:
con generatori in corrente continua;
con generatori in corrente alternata di tipo asincrono o sincrono (in BT o in MT).
I primi hanno scarse applicazioni, limitate a qualche sporadico caso in cui è esclusivamente
necessaria l’alimentazione in c.c.. Attualmente vengono sostituite da macchine in corrente alternata
abbinate a raddrizzatori, che garantiscono una maggior flessibilità di impiego. Dato lo scarso
utilizzo non si ritiene utile, in questo contesto, la loro trattazione.
Anche per i generatori, così come per i motori, si può effettuare una classificazione per gamme
di potenza. Nel mercato esistono specifici generatori per proprie fasce di erogazione, soprattutto
determinati dalla standardizzazione che man mano si è venuta a consolidare con il tempo e con le
tipologie di carico. In tal senso, si possono suddividere i generatori secondo la classificazione
riassunta dal diagramma di Figura 2.15.
Gruppi
elettrogeni
Potenza GE
piccolissima
potenza
1 ≤ P < 7 kWe
medio - piccola
potenza
7 ≤ P < 25 kWe
medio - grande
potenza
25 ≤ P ≤ 800 kWe
grande
potenza
> 800 kWe
ASINCRONI
SINCRONI
Generatori in
corrente alternata
a condensatore
compound
elettronica
Figura 2.15 Classificazione dei generatori per gruppi elettrogeni
Nei paragrafi che seguono si prendono in esame le varie tipologie di generatori assegnando a
quelli sincroni maggior rilievo, poiché sono quelli maggiormente utilizzati nella costruzione dei
gruppi elettrogeni.
2.3.2 Generatori asincroni
Le macchine asincrone, come del resto le sincrone, sono reversibili, nel senso che possono
funzionare sia da motore sia da generatore. Nell’ambito dei generatori trovano impiego quando è
previsto il loro funzionamento in parallelo con la rete, dalla quale prelevano la potenza reattiva
necessaria per generare il campo magnetico rotante. Nel funzionamento in isola, ad esempio in
Emilio Giomo
Capitolo 2. Motori e generatori per gruppi elettrogeni
25
emergenza, il generatore asincrono deve ricevere dall’esterno l’energia reattiva, mediante batterie di
condensatori, che possono però generare pericolosi fenomeni di risonanza. Per questo l’utilizzo
dell’asincrono è limitato alle applicazioni in cui il gruppo elettrogeno è esercito in parallelo alla
rete, ad esempio nella cogenerazione, e non si addice agli altri casi.
2.3.3 Generatori sincroni
I generatori sincroni per gruppi elettrogeni sono esclusivamente del tipo a poli salienti. Esiste
qualche raro caso di applicazione di macchine a rotore liscio, accoppiate alle turbine, ma la loro
presenza in questo contesto è priva di significato.
La loro struttura è praticamente la stessa a partire da qualche kVA ai MVA. Quello che le
differenzia è il tipo di eccitazione e di regolazione, che assumono gradi di prestazione più elevati
man mano che si sale con la potenza. I generatori, poi, sono realizzati ad indotto fisso (statore) e
induttore rotante (rotore), solitamente con albero di tipo monosupporto. Generalmente sono
provvisti di avvolgimenti di smorzamento ubicati sulle scarpe polari dell’induttore.
Nei prossimi paragrafi si illustrano le varie tipologie di generatori sincroni, analizzando, per
ogni caso, le caratteristiche proprie dei sistemi di eccitazione e di regolazione.
2.3.3.1 Generatori sincroni per gruppi elettrogeni di piccolissima potenza
Per questa gamma di potenza, i generatori sincroni disponibili sul mercato sono generalmente
monofasi con eccitazione brushless e regolazione a condensatore. Il sistema utilizza il campo
inverso generato dagli avvolgimenti statorici per magnetizzare la ruota polare (vedi Figura 2.16). Su
questa sono montati uno o due avvolgimenti, accoppiati con altrettanti diodi di raddrizzamento, che
provvedono a indurre la polarità al campo induttore. L’avvolgimento ausiliario, collegato ad un
condensatore, provvede a fornire la magnetizzazione della ruota polare nelle condizioni di
funzionamento a vuoto. A carico, invece, il campo inverso generato dall’avvolgimento principale
induce nel rotore la corrente necessaria per fornire il campo sufficiente a sostenere la tensione
nominale. A beneficio del lettore, in Appendice A viene brevemente descritto il funzionamento di
questi alternatori.
La regolazione risente sensibilmente delle variazioni di velocità che, per questi gruppi
elettrogeni, è relativamente ampia, dovuta sia alla irregolarità ciclica dei motori sia all’imprecisione
dei loro sistemi di regolazione.
Il sistema, infatti, non offre una grande precisione della tensione, che è mantenuta all’interno
del ±10% in condizioni statiche. Quindi, le loro applicazioni si limitano alla alimentazione di utenze
non particolarmente sensibili alla tensione, come le bancarelle e qualche carico residenziale.
Emilio Giomo
Capitolo 2. Motori e generatori per gruppi elettrogeni
26
In Figura 2.17 sono riportati sinteticamente i dati caratteristici dei generatori per gruppi
elettrogeni di piccolissima potenza.
Figura 2.16 Schema elettrico alternatore con eccitazione brushless e regolazione a condensatore
Generatori
sincroni per
gruppi elettrogeni
di
piccolissima
potenza
1 ≤ P < 7 kWe
Sistema di eccitazione:
Regolazione:
Precisione della tensione:
Tensione [V]:
Icc/In:
THDV%:
brushless
a condensatore
± 10%
115 - 230
3
≤8
Regime di rotazione [giri/min]:
3000
Grado di protezione:
IP21
Numero morsetti:
4
Figura 2.17 Dati caratteristici e prestazioni dei generatori sincroni per gruppi elettrogeni di piccolissima potenza
Emilio Giomo
Capitolo 2. Motori e generatori per gruppi elettrogeni
27
2.3.3.2 Generatori sincroni per gruppi elettrogeni di medio-piccola potenza
Questa gamma, trovandosi a cavallo tra quelle che sono state definite piccolissima potenza e
grande potenza, contempla le necessità proprie delle due fasce e, quindi, sono presenti diverse
tipologie di generatori. In essa si distinguono: alternatori con regolazione a compound ed alternatori
con regolazione elettronica, con spazzole o senza spazzole (brushless).
Il sistema con spazzole è meno oneroso rispetto a quello brushless presentando, però,
l’inconveniente dei contatti striscianti. Man mano che si sale con la potenza, questa differenza di
costo diventa sempre meno incidente, fino a diventare praticamente trascurabile oltre una certa
potenza. In linea indicativa, per potenze superiori ai 25 kVA sono utilizzati esclusivamente
alternatori brushless con regolazione compound o elettronica.
La regolazione compound, indipendentemente dal tipo di esecuzione dell’alternatore, è
realizzata per mezzo di un trasformatore, detto appunto trasformatore compound. Esso aggiunge
eccitazione alla ruota polare quando all’alternatore viene richiesta l’erogazione di corrente per il
carico (vedi Figura 2.18). L’efficacia della regolazione è affidata alle prestazioni del trasformatore:
quindi, si tratta di un sistema con prestazioni limitate nei riguardi della precisione (± 6% in regime
statico). Una illustrazione maggiormente dettagliata del funzionamento di questi generatori è
riportata in Appendice A.
La regolazione elettronica può essere applicata sia sugli alternatori con spazzole che quelli
senza spazzole. Essa consiste in una scheda elettronica che confronta il riferimento interno di
tensione, preimpostato dall’utente, con il valore di tensione misurato ai morsetti della macchina: se i
due valori si discostano, il regolatore provvede ad aumentare o diminuire il valore di tensione da
fornire alla ruota polare (direttamente nel caso di alternatore con spazzole o mediante lo statore
eccitatrice negli alternatori brushless), cioè ad aumentare o diminuire il campo magnetico che si
concatena con gli avvolgimenti principali (vedi Figura 2.19). Questo tipo di regolazione è più
accurato del precedente e garantisce una precisione statica del ±1,5%.
Nella Figura 2.20 vengono riassunti i dati caratteristici degli alternatori per gruppi elettrogeni di
medio - piccola potenza.
Emilio Giomo
Capitolo 2. Motori e generatori per gruppi elettrogeni
28
a.
b.
Figura 2.18 Schema elettrico di alternatore con regolazione compound:
a. eccitazione con spazzole, b. eccitazione brushless
Emilio Giomo
Capitolo 2. Motori e generatori per gruppi elettrogeni
29
Figura 2.19 Schema elettrico di alternatore con regolazione elettronica:
a. eccitazione con spazzole, b. eccitazione brushless
Generatori
sincroni per
gruppi elettrogeni
di
medio - piccola
potenza
7 ≤ P < 25 kWe
Sistema di eccitazione
con spazzole
Regolazione:
brushless
compound
elettronica
compound
elettronica
± 6%
± 1.5%
± 6%
± 1.5%
400/230
400/230
400/230
400/230
3
3
3
3
≤6
≤6
≤6
≤6
Regime di rotazione [giri/min]:
1500 - 3000
1500 - 3000
1500 - 3000
1500 - 3000
Grado di protezione:
IP21 - IP23
IP21 - IP23
IP21 - IP23
IP21 - IP23
6
6
6
6
Precisione della tensione:
Tensione [V]:
Icc/In:
THDV%:
Numero morsetti:
Figura 2.20 Dati caratteristici e prestazioni degli alternatori per gruppi elettrogeni di medio - piccola potenza
Emilio Giomo
Capitolo 2. Motori e generatori per gruppi elettrogeni
30
2.3.3.3 Generatori sincroni per gruppi elettrogeni di medio-grande e grande potenza
In queste gamme sono presenti esclusivamente alternatori brushless con regolazione elettronica.
Costruttivamente sono equivalenti a quelli precedentemente illustrati, distinguendosi, comunque,
per alcune varianti che vengono solitamente richieste ed applicate per queste potenze.
Una di queste è l’eccitazione a magneti permanenti (PMG). Con questo sistema, il regolatore di
tensione viene alimentato da un generatore a magneti permanenti che fornisce, al regolatore stesso,
una tensione costante e stabilizzata. Pertanto, il regolatore non subisce alcuna influenza dalla
tensione di macchina, assicurando allo statore eccitatrice una alimentazione corretta e priva di errori
(vedi Figura 2.22 e Figura 2.23). La variante PMG è disponibile, in linea di massima, per potenze
maggiori od uguali a 100 kVA.
Il sistema a PMG è particolarmente indicato nei seguenti casi:
per l’alimentazione di carichi distorcenti;
per l’alimentazione di carichi con elevate correnti di spunto (avviamento di motori
asincroni);
per l’alimentazione di carichi particolarmente sensibili alla precisione della tensione;
per il sostentamento della corrente di corto circuito per l’intervento delle protezioni
magnetotermiche.
Regolatore
elettronico
Rilevamento tensione e
alimentazione regolatore
Statore eccitatrice
Rotore eccitatrice
USCITA
Statore principale
ac
dc
Asse alternatore
Ponte
diodi
rotante
Rotore principale
Figura 2.21 Schema a blocchi alternatore brushless con regolazione elettronica senza PMG
Emilio Giomo
Capitolo 2. Motori e generatori per gruppi elettrogeni
31
Rilevamento tensione
USCITA
Regolatore
elettronico
Statore PMG
Statore
eccitatrice
Statore principale
Ponte
diodi
rotante
ac
dc
Asse alternatore
Rotore
eccitatrice
Rotore PMG
Rotore principale
Figura 2.22 Schema a blocchi alternatore brushless con regolazione elettronica con PMG
Ventola raffreddamento
Ponte diodi
rotante
Rotore PMG
Rotore eccitatrice
Rotore principale
Figura 2.23 Rotore di un alternatore con PMG
Per queste gamme di potenza, gli alternatori sono altresì disponibili con avvolgimenti a 12
morsetti. Questa variante, rispetto allo standard a 6 morsetti, consente di ottenere un maggiore
disponibilità di tensioni in uscita e, quindi, una elevata flessibilità d’uso. Infatti, con i 6 morsetti le
tensioni ottenibili sono:
a stella: 380÷415/220÷240V a 50Hz e 415÷480/240÷277V a 60Hz;
a triangolo: 220÷240V a 50Hz e 240÷277V a 60Hz (nel caso di alimentazione monofase la
potenza dell’alternatore deve essere ridotta a 2/3 della nominale);
Con la versione a 12 morsetti, invece, possono essere ricavate le seguenti tensioni:
a stella-serie: 380÷440/220÷254V a 50Hz e 380÷480/220÷277V a 60Hz;
a stella-parallelo: le tensioni ottenibili sono la metà delle precedenti;
Emilio Giomo
Capitolo 2. Motori e generatori per gruppi elettrogeni
32
a triangolo-serie: 220÷254V a 50Hz e 220÷277V a 60Hz (nel caso di alimentazione
monofase la potenza dell’alternatore deve essere ridotta a 2/3 della nominale).
a.
b.
Figura 2.24 Collegamento delle fasi: a. alternatore a 6 morsetti; b. alternatore a 12 morsetti
Normalmente gli alternatori di questa taglia sono provvisti di avvolgimenti a passo raccorciato
2/3. Questo è particolarmente utile in presenza di carichi distorcenti, poiché consente di eliminare le
armoniche di tensione di terzo ordine e le sue multiple dispari. Considerando, infatti, il
collegamento di una singola fase (le altre sono sfasate di 2/3π e 4/3π ed equivalenti ai fini
dell’analisi), si ha che la tensione stellata è pari alla somma di due vettori sfasati di 60°,
corrispondenti alle tensioni indotte in due avvolgimenti geometricamente sfasati dello stesso valore
e collegati in serie (vedi Figura 2.25).
V V1 V2
V2
60°
Centro stella
V1
Figura 2.25 Somma dei vettori di tensione di una fase in un collegamento zig-zag stella
Per le armoniche di terzo ordine, e loro multiple, si ha:
v v1 v2 Vˆ cos3kt Vˆ cos 3k t
3
v v1 v 2 V̂ cos3kt V̂cos3kt cos k sin 3kt sin k
v v1 v 2 V̂ cos3kt V̂ cos3kt cos k
Emilio Giomo
Capitolo 2. Motori e generatori per gruppi elettrogeni
33
Per k 1,3,5,.... , si ha:
v v1 v2 Vˆ cos3kt Vˆ cos3kt 0
e quindi tendono ad eliminarsi.
Generatori
sincroni per
gruppi elettrogeni
di
medio - grande
potenza
25 ≤ P ≤ 800 kWe
Sistema di eccitazione:
grande
potenza
> 800 kWe
brushless (PMG in opzione ≥ 100kVA)
Regolazione:
Precisione della tensione:
Tensione [V]:
Icc/In:
THDV%:
Regime di rotazione [giri/min]:
elettronica
± 1.5% - ± 0.5%
400/230 - 415/240
3
≤3
1500
Grado di protezione:
IP21 - IP23
Passo avvolgimenti:
raccorciato 2/3
Numero morsetti:
6 - 12 - 4
Nota
Gli alternatori di grossa potenza (superiore ai 2000 kVA) possono essere forniti con uscita a 4 morsetti collegati
a stella
Figura 2.26 Dati caratteristici e prestazioni degli alternatori per gruppi elettrogeni
di medio - grande e grande potenza
Nella Figura 2.26 sono riassunti i dati caratteristici degli alternatori per gruppi elettrogeni di
medio - grande e grande potenza.
2.4 Accoppiamento motore-generatore
L’accoppiamento tra il motore primo e il generatore è regolato dalle norme SAE. Queste
disciplinano le dimensioni e le modalità di collegamento tra le macchine, contemplando una serie di
accoppiamenti standardizzati. Infatti, le dimensioni delle campane coprivolano e dei giunti (volano)
sono stabilite in sede normativa e devono essere rispettate dal costruttore del motore diesel e dal
costruttore del generatore (vedi esempi di Figura 2.27).
Emilio Giomo
Capitolo 2. Motori e generatori per gruppi elettrogeni
34
Figura 2.27 Tabelle SAE delle dimensioni normalizzate del giunto e della campana
per l’accoppiamento tra motore e generatore
Normalmente l’accoppiamento è di tipo monosupporto: l’albero dell’alternatore ha un solo
cuscinetto dal lato opposto accoppiamento. Dall’altro lato, quello da cui riceve il movimento, è
dotato di un giunto a dischi flessibili che va a calettarsi sulla sede del volano del motore. Questo
tipo di accoppiamento si distingue da quello classico bisupporto (alternatore a due cuscinetti con
uscita ad albero ed accoppiamento mediante giunto) per la sua semplicità ed economicità; il suo
utilizzo deve essere approvato dal costruttore del motore e da quello dell’alternatore. In caso
contrario, si deve optare per l’accoppiamento bisupporto con giunto.
Emilio Giomo