Facoltà di Ingegneria - Università di Pisa
Anno Accademico: 2012/13
TECNICA ED ECONOMIA DEI TRASPORTI
Docente: Marino Lupi
MECCANICA DELLA LOCOMOZIONE
- EQUAZIONE GENERALE DEL MOTO. MOTO IN CURVA
DEI VEICOLI STRADALI E FERROVIARI. SPAZIO DI
FRENATURA
- TRAZIONE
1
Equazione generale del moto
dv
T − R = Me
dt
Me = M ⋅ (1 + β )
Massa Equivalente
Si introduce il concetto di massa equivalente per tenere conto delle
masse rotanti. Principali masse rotanti in un veicolo da trasporto:
•ruote
•pistoni, alberi, organi del cambio e volano (veicoli equipaggiati con
motore a combustione interna)
•rotore (veicoli equipaggiati con motore elettrico)
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
2
Vediamo come si può ricavare β
P v2
I iωi2
+∑
g 2
2
1442i443
Energia cinetica del mezzo reale
=
P
v2
(1 + β )
g
2
14243
Energia cinetica del mezzo fittizio
In pratica per tenere conto delle masse rotanti incremento, in
modo fittizio, il valore della massa di un coefficiente β .
I i : momento di inerzia dell’i-esimo corpo rotante.
ωi : velocità angolare dell’i-esimo corpo rotante.
Velocità di avanzamento
ωi
εi =
del veicolo
ωr
Velocità angolare delle ruote = v
raggio delle ruote
r
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
3
v
ωi = ε i
r
Sostituisco nella equazione precedente
2
Ii 2 v
P v2
P
v2
+ ∑ ε i 2 = (1 + β )
g 2
r
g
2
i 2
P v2
g
(1 + 2
g 2
Pr
g
β= 2
Pr
2
P
v
2
I
ε
∑i i i ) = g (1 + β ) 2
2
I
ε
∑ii
i
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
4
Posso calcolare β
con delle formule pratiche:
β = 0,04 + a m 2 10 −3
2÷3
autovetture
m è il rapporto di trasmissione
N 2 −4
β = 0,04 + 0,95 m 10
M
autocarri vecchio tipo
N 2 −4
β = 0,04 + (0,7 ÷ 0,8) m 10
M
autocarri nuovo tipo
N è la potenza in KW del motore; M è la massa in tonnellate del
veicolo.
Nel caso di motore a combustione interna poiché β = f (ε i ) ⇒ β
Lupi
M., "Tecnica
Trasporti",
Univ.
, A.A. 2012-13.
varia
con laed Economia
marcia,deiossia
con
ilPisa
rapporto
di trasmissione m.
5
Schema della trasmissione
Cω
Motore
Trasmissione, di
rapporto totale m
N = Cω
C 'ω '
Ruote
motrici
A meno del rendimento della trasmissione: C 'ω ' = Cω
C' ω
= =m
C ω'
m >1 perché voglio incrementare la coppia in
uscita dal motore
Il rapporto di trasmissione, totale, dipende dalla marcia i: mi
i
i
c
m = mpm
rapporto al cambio (varia al variare della marcia)
rapporto al ponte (è fisso per un certo veicolo)
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
6
Esempio: Calcolo del coefficiente β per l'autovettura FIAT Punto.
mP = 3,866
m1c = 3,909
m1 = 15,11
β 1 = 0,04 + 2,5(15,11) 2 10 −3 = 0,61
m 2c = 2,157
mc3 = 1,48
m 2 = 8,34
m 3 = 5,72
m 3 = 4,33
β 2 = 0,21
β 3 = 0,12
β 4 = 0,09
β 5 = 0,07
mc4 = 1,121
5
c
m = 0,902
m 5 = 3,49
Equazione generale del moto
dv
T − R = M (1 + 0,07)
dt
dv
T − R = M (1 + 0,61)
dt
5° marcia
1° marcia
7
Valori esemplificativi di β
Autobus (operante in servizio urbano)
β = 0,22
Filobus / tram
β = 0,12
Locomotiva elettrica
Automotrice elettrica
β = 0,15 ÷ 0,20
β = 0,10 ÷ 0,15
Veicolo rimorchiati (treno)
Treno completo
β = 0,06 ÷ 0,08
β = 0,05 ÷ 0,06
Locomotiva diesel
β = 0,05 ÷ 0,4
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
8
Forma dell’equazione generale del moto
(seconda equazione di Newton in cui sono esplicitate le
resistenze).
[N] [N]/[KN]
‰
[KN]
[m2] [Km/h]
[KN]
[m/sec]
P
dv
(1 + β )
=0
T − (rr ± i ) P − 0,0473 ⋅ Ca ⋅ S ⋅ V − 1000
g
dt
2
[m/sec2]
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
[sec]
9
9
Moto in curva di un veicolo da trasporto
Fc
Si inclina la piattaforma in modo tale che la
risultante della forza peso e della forza
centrifuga sia ortogonale al piano stradale e
non esista una componente di tale risultante
lungo il piano della via.
angolo retto
θ
P
θ
Ptgθ = Fc
P v2
Fc =
g R
v2
= gtgθ
R
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
10
θ
P
θ
Però all’aumentare di v affinché la
risultante della forza peso e della forza
centrifuga sia ortogonale al piano
stradale dovrei avere una piattaforma
troppo inclinata.
Quindi si ha una
θ
componente trasversale, non
Fc
compensata, lungo la
piattaforma, che
provocherebbe lo
sbandamento del mezzo: ad
essa si oppone, nel caso
stradale, l’aderenza
trasversale esercitata dalla
via sui pneumatici; nel caso
θ
ferroviario la reazione di
contatto rotaia - bordino.11
Caso stradale
Equilibrio alla traslazione lungo il piano stradale
FC cos θ − Psenθ ≤ N
ft
Coefficiente di aderenza trasversale
Forza che “schiaccia” il veicolo sulla via
N = Fc senθ + P cos θ
FC cos θ − Psenθ ≤ ( Fc senθ + P cos θ )
ft
Divido ambo i
membri per cos θ
Fc (1 − tgθ f t ) ≤ P (tgθ + f t )
v2
tg θ + f t
≤
g R 1 − tg θ f t
Posso trascurare rispetto all’unità
12
2
v
= gtgθ + gf t
R
Parte della accelerazione centrifuga
compensata dall’aderenza.
Parte della accelerazione centrifuga
compensata dalla pendenza.
Se introduco il valore max della pendenza secondo la nostra
normativa, 0,07, ed il valore max del coefficiente di aderenza
alla velocità di progetto f t (vP ) posso ricavare il valore del
raggio minimo di progetto.
Rmin
vP2
=
g (0,07 + f t (vP ))
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
13
Caso ferroviario
v2
= gtgθ
R
Nel caso di perfetta compensazione
Sopraelevazione max
della rotaia esterna (FS)
Nel caso ferroviario tgθ max = 16
150
Scartamento di binario
16 cm
(approssimato)
150 cm
Quindi una curva di raggio R
massima:
può essere percorsa alla velocità
16
Vmax = 3,6 R ⋅ g ⋅ (
) ≈ 3,6 R
150
m
Km/h
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
14
Le FS però ammettono che esista una accelerazione non
compensata.
v2
= gtgθ + anc
R
Ler FS suddividono i treni in ranghi: in base alla anc max che
possono sopportare:
- Rango A
anc = 0,6 m / s 2
treni merci.
- Rango B
anc = 0,8 m / s 2
materiale viaggiatori e merci
“certificato” per i 140km/h.
- Rango C
anc = 1 m / s 2
elettrotreni e treni viaggiatori
composti di carrozze “certificate”
per velocità superiori a 160 km/h.
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
15
m/sec
v2
= gtgθ + anc
R
Km/h
Da questa formula posso ricavare le velocità
massime di percorrenza per una curva di
raggio R per i vari ranghi di velocità.
16
V = 3,6 R ⋅ ( g
+ anc )
150
- Rango A
V = 3,6 R(9,81 ⋅16 / 150 + 0,6) ≈ 4,619 R
- Rango B
V = 3,6 R(9,81 ⋅16 / 150 + 0,8) ≈ 4,892 R
- Rango C
V = 3,6 R(9,81 ⋅16 / 150 + 1) ≈ 5,150 R
Un carrello ferroviario in realtà è in grado di sopportare anc > 1 ; il
valore di 1 m / sec 2 è imposto per la limitare l’accelerazione che
Lupi
M., "Tecnica ed
Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
16
subiscono
i passeggeri.
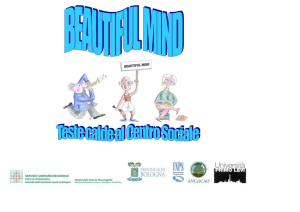
Esiste però anche il rango P che si riferisce agli elettrotreni (assi
motori distribuiti su numerosi veicoli, materiale cosiddetto
“leggero”, ossia a peso max per asse limitato) ad assetto variabile:
infatti P sta per Pendolino.
Assi portanti
Assi motori
Schema rodiggio ETR 500 (rodiggio: parte di un veicolo ferroviario
che sta sotto le sospensioni)
Schema rodiggio Pendolino (assi motori distribuiti): ETR 401; ETR450;
ETR 460; ETR 470; ETR 480; ETR600, ma ora anche AGV
(Automotrice à Grande Vitesse)
Schema composizione TGV( due locomotive, una in testa un’altra in
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
17
coda, come ETR 500)
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
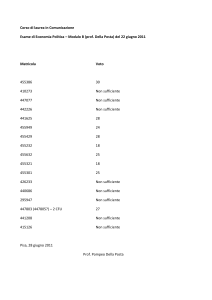
axle load: 17 tonnes per axle
18
Fonte:Vicuna G. (1986) Organizzazione
e Tecnica Ferroviaria. CIFI, Roma.
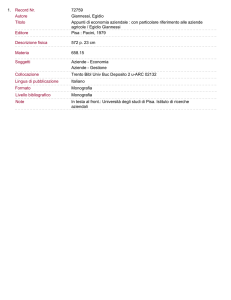
Nel pendolino alla compensazione
della forza centrifuga dovuta
all’inclinazione della piattaforma si
aggiunge la compensazione (per i
passeggeri) dovuta alla inclinazione
della cassa.
Schema del meccanismo di
inclinazione dell’elettrotreno ad
assetto variabile ETR 401.
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
19
V = 3,6 R 9,81(
16
+ tg 8o ) + 0,8 = 6,46 R
150
Quindi, a parità di R , in rango P (ossia da un pendolino) una curva
può essere percorsa (supponendo una inclinazione della cassa di 8°)
con una velocità superiore di circa il 25% rispetto al rango C .Il
progetto pendolino fu pensato per aumentare la velocità sulla
cosiddetta “rete storica” (in pratica l’insieme delle linee che
esistevano prima della II guerra mondiale, poi comunque ricostruite
dopo la guerra).
Comunque le FS hanno fissato per il rango P la anc = 1,8 m / s 2 (sul
carrello). Quindi ottengo per la velocità max di percorrenza di una
curva di raggio R :
V = 3,6 R(9,81 ⋅16 / 150 + 1,8) ≅ 6,07 R
In questo caso l’incremento, rispetto al rango C, risulta di circa
il 18%.
20
Linee ferroviarie ad alta velocità
Linea direttissima: Firenze-Roma (prima linea ad alta velocità italiana)
VP = 250 km/h
12,5
tgθ =
150
anc = 0,8 m / s 2
⇒
V = 3,6 R(9,81 ⋅12,5 / 150 + 0,8) ≅ 4,579 R
Rmin
VP
250 2
=(
)=(
) ≈ 3000 m
4,579
4,579
Pendenza massima della linea imax = 8 ‰
Alimentazione della linea: corrente continua a 3000 volt.
Tratto più recente della direttissima, Rovezzano- Chiusi Sud (la
direttissima Firenze-Roma è stata costruita in circa 20 anni):
VP = 300 km/h Rmin ≈ 3900m
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
21
Nuove linee ad alta velocità: Roma-Napoli; Torino-Milano, BolognaMilano, Firenze-Bologna
VP = 300 km/h
V = 3,6 R (9,81 ⋅ 10,5 / 150 + 0,6) ≅ 4,08 R
10,5
tgθ =
VP
300 2
150
Rmin = (
)=(
) ≈ 5400 m
2
4,08
4,08
anc = 0,6 m / s
Alimentazione della linea: corrente elettrica alternata monofase 25000
volt, 50 Hz, in modo simili alle linee ad alta velocità francesi.
Roma-Napoli: imax = 18 ‰ (in galleria 10 ÷ 12 ‰ , due brevi
tratti al 21 ‰ )
VP = 240 km / h
La
linea
ha
due
tratti
a
‰
i
=
15
Bologna-Milano: max
(Rmin ≈ 3440 m )
Torino-Milano, Firenze- Bologna: imax = 15 ‰ (Per l’attraversamento
sotterraneo di Firenze22è
prevista una imax = 18 ‰
)
Fonte:Ottomanelli M., Tecnica ed Economia dei Trasporti, Politecnico di Bari; Stagni E., Meccanica della Locomozione, Patron, Bologna
,1980.
23
Fonte:Stagni E., Meccanica della Locomozione.
Patron, Bologna ,1980.
Fenomeno dello svio
La forza laterale FY provoca una forza di attrito f ' N che tende a
fare “arrampicare” la ruota sulla rotaia e quindi a fare sviare la
Lupi
M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
24
ruota.
Fonte:Stagni E. (1980) Meccanica
della Locomozione. Patron, Bologna.
Forze agenti sulla ruota ferroviaria in
condizioni di svio (situazione limite)
FY cos β + f ' N ≤ P cos(90 − β )
N = P cos β + FY cos(90 − β )
P
f 'N
β
FY
FY cos β + f ' ( P cos β + FY senβ ) ≤ Psenβ
β
FY (cos β + f ' senβ ) ≤ P( senβ − f ' cos β )
N
FY (1 + f 'tgβ ) ≤ P(tgβ − f ' )
90 − β
Formula di Pochet
FY
tan β − f '
=
P 1 + f ' tan β
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
25
'
β ≈ 60° e f = 0,25
⇒
FY
tan 60° − 0,25
=
= 1,03
P 1 + 0,25 tan 60°
Nella pratica dell’esercizio ferroviario si considera che la
stabilità allo svio sia assicurata quando risulti: FY ≤ 1
P
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
26
Spazio di frenatura
dv
T − R = Me
dt
T = 0
Ff
in frenatura stacco la trazione.
aggiungo alle resistenze una consistente forza frenante
dv
− F f − R = Me
dt
sf = ∫
sf
0
Equazione generale del moto
dv ds
⇒ − F f − R = Me dt ds
0
⇒
v0
v
v
ds = − Me ∫
dv = Me ∫
dv
Ff + R
Ff + R
vo
0
v
ds = − Me
dv
( Ff + R)
s f Spazio di
frenatura
v0
P
s f = (1 + β ) ∫
g 0
v
dv
2
rr
kSv
i ‰
F f + P(
+
±
)
Lupi M., "Tecnica ed Economia dei Trasporti",
2012-13.
1000 Univ. Pisa
P , A.A.1000
P e F f sono in
N, rr è in
N/KN 27
v
P 0
s f = (1 + β ) ∫
g 0
v
dv
2
i‰
r
kSv
F f + P( r +
±
)
1000
P
1000
N
N/KN
N
v0
v
(1 + β )
sf =
dv
2
∫
F
rr
kSv
i‰
g 0 f
+(
+
±
)
P
1000
P
1000
v
v
(1 + β ) 0
sa = v0t0 +
dv
2
∫
r
kSv
i ‰
g 0 Ff
+( r +
±
)
P
1000
P
1000
sa Spazio di
arresto
Valida sia per il
caso stradale,
sia per quello
ferroviario.
Tempo di percezione e reazione del
conducente e di intervento meccanico del
freno ( tempo alto nel caso ferroviario).
Caso stradale
Considero una frenatura al limite dell’aderenza e perciò
pongo: F f = Pf a
2
r
kSv
Al posto di f a + r +
1000
P
aderenza equivalente: f e (v0 )
introduco un coefficiente di
f e (v0 ) Tiene conto del fatto che il coefficiente f a di aderenza
varia con la velocità. Inoltre tiene conto del fatto che anche le
resistenze al rotolamento e la resistenza dell’aria variano con
la velocità. Integro l’equazione precedente ed ottengo:
v02
1+ β
sa = v0t0 +
g 2g ( f ± i ‰ )
e
1000
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
29
vo2
sf =
2ab
Formula per lo spazio di frenatura nel caso di moto
uniformemente decelerato.
g
i ‰
( fe ±
)
Coincide con la precedente quando pongo: ab =
1+ β
1000
i ‰ = 0 nel caso di marcia in piano
β ≈0
In questo caso:
nel caso di autovettura a marcia “alta”
vo2
sf =
2g fe
Posso utilizzare la formula precedente per fare delle misurazioni
sperimentali di f e .
Misuro: s f
⇒ ricavo f e
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
30
Fonte: AASHO, A Policy on Geometric Design of
Rural Highways, AASHO, Washington, 1965.
Ho una serie di curve sperimentali (americane) che tengono conto
del tipo e condizione delle superfici a contatto. Il coefficiente f e non
è facile da stimare.
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
31
Potrei utilizzare un approccio un po’ diverso. Fare delle prove
”normalizzate” per ciascun veicolo: ossia su un determinato tratto
stradale, con pneumatici nelle medesime condizioni, con frenata che
inizia ad una determinata velocità ed in condizioni atmosferiche
normalizzate. Potrei interpretare in questo caso f e come una misura
della capacità frenante del veicolo sottoposto a prova ed attribuire un
valore di f e a ciascun veicolo che ne esprimerebbe, in maniera
sperimentale, la capacità frenante. Questo tipo di approccio viene
utilizzato, ed è normalizzato, nel caso ferroviario.
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
32
Caso ferroviario
Fonte:Vicuna G., Organizzazione e Tecnica
Ferroviaria. CIFI, Roma ,1986.
Consideriamo il “classico” freno a ceppo.
Quale è il problema di
una tale tipo di freno?
f 'Q ≤ f a P
⇒
Q fa
≤ '
P f
Al variare di V varia f a
f ' Coefficiente di attrito fra
ceppo e cerchione della
ruota.
, ma anche f ' .
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
33
Fonte: Vicuna G. (1986)
Organizzazione e Tecnica
Ferroviaria. CIFI, Roma.
Si deve evitare il blocco della ruota: perché non si avrebbe più la forza
di aderenza, ma la forza di attrito radente (ruota-rotaia) che è inferiore.
Inoltre se si blocca la ruota ho il danneggiamento del cerchione.
Con un freno che può esercitare un unico valore di Q, se si vuole
evitare a tutte le velocità il blocco della ruota, si deve considerare la
Lupi M., "Tecnicapiù
ed Economia
dei Trasporti",
Univ. Pisa
A.A.in
2012-13.
situazione
vincolante:
questa
si, ha
prossimità di V=0, dove f34' > f a
Poiché:
f a ,V =0
f
'
V =0
≈ 0,7
Posso ammettere un valore max per Q che è 0,7 P.
Q
= λr ≤ 0,7
P
Percentuale di peso frenato reale.
Consideriamo un treno che è composto da numerosi assi e
consideriamo il rapporto fra sforzo frenante totale F f e peso totale
del treno P
:
peso sull’i-esimo asse
'
f
Qi
percentuale di peso frenato
Ff ∑
Q
P
'
'
= i
= f ∑ i i = f λr
reale per tutto il treno:
P
P
i Pi P
valore max =0,7 per freni a
ceppo vecchio tipo.
i-esimo asse
peso totale del
treno
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
35
E’ stata introdotta una percentuale di peso frenato detta convenzionale,
indicata con λc , che è uguale ad 1 quando λr = 0,7 .
Quindi sarà:
Ff
P
= f ' 0,7λc
Percentuale di peso convenzionale del treno
Sostituisco nella formula per il calcolo dello spazio di arresto
v0
(1 + β )
sa = v0t0 +
g ∫0
v
2
rr
kSv
i‰
0,7 λc f + (
+
±
)
1000
P
1000
dv
'
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
36
Per la risoluzione dell’integrale precedente è stata suggerita la
seguente formula (empirica):
V02
sa =
1,09375λc 0,127
+
± 0,235i ‰
ϕ (V0 )
ϕ (V0 )
Formula di Pedelucq (1920)
- V0 è in km/h
- il coefficiente ϕ (V0 ) assume i seguenti
valori :
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
37
Il coefficiente ϕ (V0 ) varia con la velocità iniziale di frenatura e
tiene conto del fatto che
f ' varia con la velocità e che con la
velocità variano le resistenze al moto. Tiene inoltre conto del
tempo meccanico di intervento del freno . I coefficienti della
tabella, e quindi l’utilizzo della formula di Pedelucq, sono stati
estesi fino a 200km/h (quando fu messa a punto la formula la
velocità massima dei treni era consistentemente inferiore).
Quando è stata elaborata la formula di Pedelucq i freni
ferroviari erano del tipo a ceppo. Però già da tempo la tipologia
dei freni è cambiata. In particolare esistono i freni, sempre a
ceppo, ma a doppio stadio (in particolare utilizzati sulle
locomotive).
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
38
Fonte: Carpignano (1989) Meccanica dei Trasporti
Ferroviari e Tecnica delle Locomotive. Levrotto e Bella,
Torino.
f 'Q
fa P
Ho due valori di Q, forza con la quale “spingo” il ceppo: un valore
maggiore alle alte velocità (in cui f ' < f a ) ed uno minore per le
basse velocità (in cui f ' > f a ).
In questo modo l’aderenza non viene mai superata, ma la “sfrutto”
meglio alle alte velocità.
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
39
Inoltre sulle moderne carrozze viaggiatori i freni sono sempre a
disco e i freni a disco si stanno diffondendo sulle locomotive stesse.
Nel caso dei freni a disco f '
variare della velocità.
risulta praticamente costante al
f'
V
Allora come posso interpretare la formula di Pedelucq con questi
nuovi tipi di freni?
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
40
Dico che la formula è O.K.
V02
sa =
1,09375λc 0,127
+
± 0,235i ‰
ϕ (V0 )
ϕ (V0 )
Faccio delle prove di frenata normalizzate, per un certo tipo di
veicolo ferroviario (veicolo trainato isolato, locomotiva isolata, treni
di stessi veicoli trainati).
Misuro sa con una certa V0 (per esempio 120Km/h) fissata
dalla normativa UIC (“Union Internationale de Chemins de Fer”:
questo organismo non suggerisce direttamente la formula di
Pedelucq, ma suggerisce di utilizzare dei grafici basati su di essa).
Ricavo dall’equazione precedente l’unica incognita: λc
λc =
Pf
P
Conoscendo P posso ricavare Pf
dato veicolo ferroviario.
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
per il
41
Operando in questo modo Pf , il peso frenato, diventa una quantità
convenzionale, data una volta dato il singolo veicolo ferroviario, che
esprime la capacità frenate di esso. Ossia si tratta di quel valore di
peso frenato che diviso per il peso reale del veicolo ed introdotto
nella formula di Pedelucq mi dà, alla velocità normalizzata, lo spazio
di frenatura che è stato misurato sperimentalmente.
Poiché è una quantità convenzionale Pf può essere superiore
λc = 1,3
al peso del veicolo ossia: λc > 1 ; per esempio:
.
Spesso λc viene espressa in percentuale in questo caso: λc = 130%
Indicazione del peso
frenato e del peso
reale sulla fiancata
di una locomotiva.
42
Peso totale
Tara
Posti a sedere
Indicazione del peso
frenato e del peso reale
sulla fiancata di una
carrozza
Peso frenato (non è quello del veicolo precedente)
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
43
Esempio: E402B+15 carrozze.
E402B
Pf = 78 t f
P = 87 t f
(λc ≈ 0,9, ossia : 90%)
carrozza
Pf = 70 t f
P = 50 t f
(λc ≈ 1,4, ossia : 140%)
78 + 15 × 70
λc =
= 135% Percentuale di peso frenato per il
87 + 15 × 50
treno completo
(160) 2
sa (160 km / h) =
= 1205m
1,09375 ⋅ 1,35 0,127
+
0,0755
0,0755
ϕ (160) = 0,0755 (dalla tabella)
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
44
(190) 2
sa (190 km / h) =
= 1754m
1,09375 ⋅ 1,35 0,127
+
0,0779
0,0779
ϕ (190) = 0,0779
La formula di Pedelucq vale per valori di velocità fino, all’incirca, a
200km/h.
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
45
ETR500 prima serie
11 carrozze
100 + 36 + 11 × 74
λc =
= 159%
2 × 68 + 11 × 42
Percentuale di peso
frenato per il treno
completo
(200)2
sa (200 km / h ) =
= 1686m
1,09375 ⋅ 1,59 0,127
+
0,0787
0,0787
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
46
Come distanza di sicurezza (distanza libera da ostacoli) per un ETR
500 viaggiante a 300 km/h, sulle nuove linee ad alta velocità, si
assume 9 km.
La distanza di arresto, con frenatura di servizio, per un ETR 500
viaggiante a 300 km/h, è di circa 7-8 km.
La distanza di arresto, con frenatura di emergenza, sempre per un
ETR 500 viaggiante a 300 km/h è poco superiore ai 3 km.
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
47
Un’altro aspetto da tenere presente, a proposito della frenatura dei
treni, è che nelle locomotive elettriche moderne si utilizza la
frenatura elettrica: ossia la locomotiva (o i carrelli motori nel caso
degli elettrotreni a trazione distribuita) non assorbe energia elettrica,
ma assorbe energia meccanica e la trasforma in energia elettrica,
ossia funziona come un generatore di elettricità, non come un
motore.
trasforma
Motore elettrico: Energia elettrica
Energia meccanica
trasforma
Generatore elettrico: Energia meccanica
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
Energia elettrica
48
Caratteristica meccanica di trazione
T(kN)
La caratteristica meccanica di trazione di un veicolo da trasporto è
una curva T (V ) che mi fornisce il valore massimo della trazione
che posso avere ad una determinata velocità.
A
B
Zona della
potenza
η N max = cos t
C
Caratteristica Meccanica
Ideale (è quella che vorrei
avere).
Si individuano:
•una zona detta dell’aderenza
•una zona detta della potenza
Fonte:Vicuna G. (1986) Organizzazione e Tecnica Ferroviaria. CIFI, Roma.
A basse velocità la Tmax è limitata dall’aderenza, mentre a velocità
più alte la Tmax è limitata della potenza: T V = N max η
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
49
1) Questa caratteristica meccanica è ideale perché sfrutto al massimo
le caratteristiche del mio mezzo: dove la T è limitata dall’aderenza,
ho la forza limite di aderenza; dove la T è limitata dalla potenza, ho
η N max , ossia sfrutto la potenza massima del motore.
T=
V
In realtà, a volere essere precisi, come abbiamo visto, l’aderenza
diminuisce all’aumentare della velocità. Quindi la forma della
caratteristica meccanica ideale dovrebbe essere questa:
T (V )
Aderenza Fa (V )
Potenza TV = η N max = cos t
R (V )
V
Bassa
velocità
Alta
velocità
50
T (V )
2) La caratteristica
meccanica:
E’ ideale perché è stabile.
V
R (V , i2 )
T (V )
A
R (V , i1 )
i2
i1
dv
T − R = Me
V2 V1
V
dt
Appena passato il punto A risulta: T − R < 0 . Il veicolo decelera .
Si ristabilisce però un nuovo equilibrio alla velocità V2
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
51
A
R (V , i1 )
T (V )
i3
R(V , i3 )
i1
V1
V3
V
Appena passato il punto A risulta: T − R > 0
Il veicolo accelera .
Si ristabilisce però un nuovo equilibrio alla velocità V3
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
52
3) La caratteristica
meccanica:
T (V )
V
E’ ideale da un altro punto di vista. Il mezzo di trasporto spesso opera
fra due fermate consecutive vicine fra loro (per esempio: autobus,
metropolitana). Di conseguenza opera a basse velocità, viene quindi
sfruttato solo il primo tratto della caratteristica meccanica: questo primo
tratto è quello per il quale lo sforzo acceleratore è massimo.
dv
T − R = Me
T (V )
dt
Sforzo
(T − R ) max ⇒ dv max
dt
acceleratore
massimo
V
Vmax operativa
53
4) La caratteristica
meccanica:
T (V )
V
E’ ideale nel senso che solo alcuni tipi di motori hanno una
caratteristica di questo tipo, per esempio: i motori elettrici a corrente
continua eccitati in serie e i motori elettrici a corrente alternata
monofase.
In altri motori elettrici si ottiene una caratteristica molto simile a
quella ideale attraverso l'impiego di apparecchiature elettroniche
(che agiscono sui parametri elettrici di regolazione: tensione,
frequenza, flusso): come nel caso dei motori elettrici asincroni
trifase e sincroni che negli ultimi anni si sono diffusi nel campo
della trazione ferroviaria.
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
54
I motori a combustione interna, molto diffusi fra i veicoli da
trasporto, hanno una caratteristica che è fortemente diversa da
quella ideale, ad essa cerco di avvicinarmi tramite l’intervento di
una opportuna trasmissione.
N
Infatti la caratteristica
“interna” (ossia
“all’albero motore”) di un
motore a combustione
interna è del tipo qui
riportato.
(
)
La coppia è abbastanza “piatta”. Per “avvicinarmi” alla curva
ideale
utilizzo
unadeitrasmissione
con
un2012-13.
cambio di velocità.
Lupi
M., "Tecnica
ed Economia
Trasporti", Univ. Pisa
, A.A.
55
trasmissione
Cω
Motore
Cambio
N = cω
i
c
'
η ω C =ω C
'
C ' 'ω ' '
C 'ω '
Ponte
C'
ω
i
=
=
m
⇒
c >1
i
'
ηcC ω
Ruote
motrici
Rapporto al cambio alla iesima marcia
Riesco ad amplificare la coppia in uscita dal motore C facendo
girare l’albero in uscita dal cambio con un numero di giri, nell’unità
di tempo, inferiore a quello dell’albero motore.
C ' = η ci mci C
' ω
ω = m i
c
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
56
'
'
''
η pω C = ω C
''
⇒
ω'
C ''
= '' = m P > 1
'
η pC ω
C '' = ηP mPC ' = ηciηP mci mPC = ηi miC
'' ω '
ω
ω
=
=
=
ω
i
i
m
m
m
m
P
c P
Rapporto di
trasmissione
al ponte
m i rapporto di trasmissione totale alla i-esima marcia (= mci m p )
ηi
i
rendimento totale alla i-esima marcia
''
v (n) = ω r =
n
( 2π
)
60
velocità ω (rad/sec) in uscita
dall'albero motore
1 Divido per il rapporto di
r i
mc mP trasmissione totale ed
ottengo la velocità
angolare delle ruote ω ' '
Velocità di avanzamento del veicolo al numero di giri n
(espresso
in edgiri/minuto)
del motore
i-esima marcia
Lupi M., "Tecnica
Economia dei Trasporti",
Univ. Pisa , alla
A.A. 2012-13.
radianti/secondo
57
N ( n)η i
T ì ( n) = i
= ηi
v ( n)
Caratteristica
T (V )
meccanica interna
N ( n)
n
2π
60
mci mP η i C (n)mci mP
=
r
r
I
Caratteristica
meccanica esterna
II
⇒
III
IV
V
veicolo con motore a
combustione interna
Grazie all’intervento del cambio: da un’unica curva “interna”
ottengo una serie di curve “esterne” il cui inviluppo tende alla
caratteristica meccanica ideale.
V
58
Le curve al banco si riferiscono alla
“piena ammissione”: ossia ad
acceleratore completamente
schiacciato.
Coppia a “piena ammissione”.
Attraverso il sistema di regolazione,
ossia attraverso l’acceleratore, nel
caso dei motori a combustione
interna, posso ottenere delle curve
che sono “più basse” di quella a
piena ammissione.
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
59
η Nmax = cost
Zona innesto frizione
Fonte:Vuchic V.R. (1981) Urban
Public Transportation. Systems and
Technology. Prentice-Hall.
Abbiamo definito:
Caratteristica meccanica: curva luogo dei punti V , Tmax (V ) .
Ossia velocità e trazione max a quella velocità.
Però possiamo intendere:
Caratteristica meccanica in senso “lato”: insieme dei punti (ossia
porzione di piano) V , T (V ) (non massima a quella V) che io posso
avere agendo sul sistema di regolazione (acceleratore nel caso dei
motori
a combustione interna).
T
R(V,0)
V
60
Come scelgo i rapporti di trasmissione?
Vediamo come determino il rapporto al ponte.
Ho un vincolo di potenza alle ruote: η N max
Quale sarà la vmax dato che ho disponibile una potenza η N max ?
Calcolo le resistenze alla vmax :
1
2
( P(a + b vmax ) + Crδ S vmax
) = R(vmax )
2 resistenze del mezzo (aria)
resistenze al rotolamento
dv
= 0 ⇒ R (vmax ) = T (vmax )
dt
1
2
( P( a + b vmax ) + Crδ S vmax
)vmax = η N max
2
ricavo
⇒
vmax
Ricavo la velocità massima “meccanica” (ossia data la potenza
alle ruote disponibile e le caratteristiche di resistenza del mezzo).
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
61
Numero di giri del motore in corrispondenza del quale ho la
potenza massima
vmax
n2
1
= ( 2π
) r IV
60 mc mP
Fisso mcIV , per esempio molto spesso. mcIV = 1 , e ricavo mP
Come determino gli altri mci ?
Vediamo il metodo “classico” della progressione geometrica.
Ricordiamoci la formula che mi dà la velocità di avanzamento
del veicolo ad un certo numero di giri (giri/minuto) del motore
metri
e ad una certa marcia:
n
1
i
v (n) =
( 2π
)
r i
m/sec
60
mc mP
velocità ω (rad/sec) in uscita
dall'albero motore
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
62
n2 numero di giri a cui
ho la potenza max
n1 numero di giri a cui
ho la coppia max
“Tengo” il motore fra
il numero di giri n1 e n2
Diametro delle ruote
A
v =
A
v =
π Dn2
60 mP mcI
π Dn1
60 mP mcII
B
v =
B
v =
π Dn2
C
II
c
60 mP m
π Dn1
60 mP mcIII
Eseguendo i rapporti ottengo:
v =
C
v =
π Dn2
III
c
60 mP m
D
v =
π Dn2
60mP mcIV
π Dn1
60 mP mcIV
mcI
mcII mcIII n2
= III = IV =
=α
II
mc
mc
mc
n1
63
Ho che i rapporti di trasmissione
seguono una progressione
geometrica di ragione α
m cIII = α mcIV
mcII = α mcIII = α 2 m cIV
mcI = α mcII = α 2 mcIII = α 3 m cIV
In generale però operando in questo modo ho i
cosiddetti “buchi” e i cosiddetti “ricoprimenti”.
“Buco” vuol dire che ho delle
curve R(V,i) che non intersecano la
caratteristica meccanica (a piena
ammissione): non posso sfruttare
tutta la potenza del motore per una
determinata fascia di pendenze.
Si ha un “ricoprimento” quando ho una fascia di pendenze per le quali
la curva R(V,i) interseca la caratteristica meccanica (a piena
Lupi
M., "Tecnica ed Economia
dei di
Trasporti",
Univ. Pisa , A.A. 2012-13.
64
ammissione)
per più
una marcia.
Per limitare i “buchi” ( che sono quelli che danno più problemi) posso
fare una scelta degli mci che posso definire di tipo “parageometrico”.
Parto dal metodo geometrico, ma lo modifico: per esempio per
“coprire” il buco posso “abbassare” la curva che si riferisce alla
marcia “più alta” (nel disegno), moltiplicando per α ' con α ' < α .
Vado però a “complicare” la trasmissione perché in generale per
evitare i buchi devo aumentare il numero dei rapporti. Spesso si
opera così: si lasciano i “buchi” alle marce basse (I e II) e si
evitano a quelle alte (III,IV,V).
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
65
Altro metodo per determinare i rapporti al cambio ed in
particolare per evitare i “buchi”
Parto dalla marcia più
alta, per esempio la IV, a
cui, nella figura,
corrisponde la curva 1.
Per essa fisso, come
abbiamo visto, il rapporto
di trasmissione, per
esempio: mcIV = 1 (di
conseguenza posso
ricavare, nel modo visto,
il rapporto al ponte mP )
T
R
ηN max = Tv = cos t
2
R(i)
A2
TA2
B1
2
TB1
A1
1
TA1
vB1
v A2
v A1
1
1
TA2 − TB1 = r0 + bv A22 ) + i P + C x ρSv A22 − r0 + bvB21 + i P + C x ρSvB21
2
2
144424443
(
)
(
)
resistenze al rotolamento (formula quadratica)
2
A2
2
B1
TA2 − TB1 = K (v − v )
Avendo posto:
1
K = C x ρS + Pb
2
Per evitare i buchi impongo che il punto A2 stia: sia sulla curva R (v, i )
passante per B1 , sia sulla curva Tv = ηN max . Ossia risolvo il
sistema:
TA2 − TB1 = K (v A22 − vB21 )
TA2 v A2 = TA1 v A1
Incognite: TA2 e v A2
v A1 = vmax ( velocità massima meccanica)
TB1
Cmax
=
TA1 C (n2 )
⇒
TB1 = TA1
Cmax
C (n2 )
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
N max
TA1 = η
v A1
Li conosco dalla curva
al banco del motore
67
1
1
n1
n2
)r 1
)r 1
vB1 = (2π
v A1 = (2π
60 mc mP
60 mc mP
vB1 n1
n1
=
v
v
v
v
=
Conoscendo A1 posso ricavare B1 : B1
A1
v A1 n2
n2
Ho ricavato
Dal sistema
Dati: TA1 e v A1
TB1 e vB1
TA2 e v A2
1
n2
v A1 = (2π
)r 1
60 mc mP
1
n2
v A2 = ( 2π
)r 2
60 mc mP
⇒
v A1
v A2
mc2
= 1
mc
⇒
2
c
1
c
m =m
v A1
v A2
Ricavo il rapporto al cambio della marcia immediatamente inferiore
(superiore nel disegno)
Continuo con la coppia 2-3 come ho fatto con la coppia 1-2 e ricavo
i successivi rapporti al cambio che mi permettono di evitare i buchi.
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
68
Il procedimento si arresta al raggiungimento del valore Ti e vi (o ad
un punto vicino a questo) che mi permette di viaggiare sulla
pendenza massima prevista ad una velocità massima accettabile
Ti ≅ Tmax = P (rr (vimax ) + imax )
la vimax si ricava dall'equazione:
vi ≅ vimax
P ( rr (vimax ) + imax )vimax = ηN max
Anche in questo caso potrei però avere un numero di marce troppo
elevato. Posso agire allora in modo simile al caso precedente:
2
Cmax
n
TA2 = δ TA1
+ K v A22 − v A1 1
n2
C (n2 )
Evito i buchi , per esempio alle marce alte (basse nel
δ =1
disegno), ma tendo ad aumentare il numero di rapporti.
Ammetto i buchi , per esempio alle marce basse (alte nel
δ >1
(δ = 1,2 ÷ 1,3) disegno), ma tendo a diminuire il numero di rapporti.
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
69
Diagramma di trazione
Il diagramma di trazione indica la variazione della velocità in funzione
del tempo per un veicolo da trasporto: V=F(t)
dv
Si ottiene integrando l’equazione generale del moto T − R = Me
dt
Vediamo la prima parte del diagramma di trazione: il cosiddetto
diagramma di avviamento
Integro l’equazione generale del moto alle differenze finite
∆v
T − R = Me
∆t
⇒
∆v
∆t = Me
T −R
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
70
Considero una serie di intervalli K di velocità costante ∆v (quanto più
questo è piccolo, tanto più l’integrazione con il metodo alle differenze
finite è preciso)
∆V
T, R
(T − R )
R (V , i )
Vmax
V
Km/h
si valuta lo sforzo acceleratore T-R in corrispondenza di un
determinato salto di velocità ∆V (costante, per esempio: 5 km/h).
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
71
71
si valuta il tempo necessario al veicolo da trasporto per fare il salto di
velocità ∆v (in m/sec) :
M (1 + β ) ∆v
∆t =
∆v
∆v
k
k
T (vi + ) − R (vi + )
2
2
iniziale
k
∀ intervallo k
k=1,2……K
m/sec
tik = t kf −1 con ti1 = 0
k
k
k
t f = ti + ∆t
finale
S ik = S kf −1 con S i1 = 0
k
∆v
k
k
k
S f = S i + ∆t (vi + )
2
vik = v kf −1 con v1i = 0
k
v f = k ∆v
72
costruisco il diagramma di avviamento per punti (∆V, ∆t)
V
SPAZIO PERCORSO
∆V
velocità di regime (T-R) = 0
∆t
t
All’aumentare della velocità, diminuisce lo sforzo acceleratore (T-R) e
∆t aumenta
V
tempo per arrivare alla
velocità di regime
questo è l’errore
che commetto
velocità di regime
SPAZIO PERCORSO
a = cost
t
In molti casi pratici il diagramma di avviamento si semplifica
considerando una accelerazione a costante nella fase di avviamento
73
(l’area sotto il diagramma di trazione rappresenta lo spazio percorso).
Fonte:Piro G. e Vicuna G (2000) Il
Materiale Rotabile Motore. CIFI,
Roma.
1° Esempio: Treno Intercity E402B(87t)+ 15 carrozze (750t)
Locomotiva E402B
87
750
β = 0,2
+ 0,06
= 0,075
837
837
locomotiva
carrozze
∆V
837
10
∆t = k
(1 + 0,07)
k
T −R
3,6
k
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
74
Caratteristica meccanica di trazione e curve delle resistenze per un
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
75
treno intercity: E402B(87t)+750t (carrozze).
E402B (87t) + 15 carrozze (750t)
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
76
Diagramma di avviamento per treno "intercity" con:
E402B(87t)+750t (carrozze); tempo t in secondi, V(t) in Km/h.
77
FontePiro G. e Vicuna G (2000) Il Materiale
Rotabile Motore. CIFI, Roma.
2° Esempio: ETR 500 1° serie 3KVcc: 2 motrici (68t) + 11 carrozze,
massa totale 664t
68 ⋅ 2
664 − (68 ⋅ 2)
β=
0,2 +
0,06 ≅ 0,088
664
664
locomotiva
carrozze
Motrice ETR 500 prima serie
664
25
∆t = k
(1 + 0,1)
k
T −R
3,6
k
∆V
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
78
FontePiro G. e Vicuna G (2000) Il Materiale
Rotabile Motore. CIFI, Roma.
Caratteristica meccanica di trazione e curva delle resistenze per un
Lupi
M., "Tecnica
ed Economia
Trasporti", Univ.
Pisa+
, A.A.
79
ETR
500 1°
serie:2deimotrici
(68t)
112012-13.
carrozze, massa totale 664t.
Tabella per la determinazione del diagramma di avviamento: ETR
500 1° serie:2 motrici (68t) + 11 carrozze, massa totale 664t.
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
80
Diagramma di avviamento per ETR 500 1° serie:2 motrici (68t) + 11
Lupi
M., "Tecnicamassa
ed Economia
dei Trasporti",
Pisa , A.A.
carrozze,
totale
664t;Univ.
tempo
in 2012-13.
secondi, velocità in km/h. 81
Fonte:Piro G. e Vicuna G (2000) Il
Materiale Rotabile Motore. CIFI, Roma.
3° Esempio: Treno ad alta frequentazione TAF(273t)
Treno TAF (Treno ad Alta Frequentazione)
273
10
∆t = k
(1 + 0,1)
k
T −R
3,6
k
∆V
82
Fonte:Piro G. e Vicuna G (2000) Il Materiale
Rotabile Motore. CIFI, Roma.
Caratteristica meccanica di trazione per treno TAF.
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
83
Tabella per la determinazione del diagramma di avviamento: Treno ad
Alta Frequentazione (TAF) di 273 t.
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
84
Fonte:Piro G. e Vicuna G (2000) Il Materiale
Rotabile Motore. CIFI, Roma.
Diagramma di trazione (completo) per treno TAF su tratte di
lunghezza differente (5 e 2 km).
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
85
Fonte: Alstom transport
Caratteristica meccanica di Trazione di un AGV (Automotrice
à Grande Vitesse)
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
86
Forme del diagramma di trazione
Quando si determina il diagramma di trazione sono dati:
- a: accelerazione in fase di avviamento, che, per semplicità,
si suppone costante e pari al valore medio.
- b: decelerazione costante in fase di frenatura.
- Vr : velocità di regime (fra due fermate successive).
- S: distanza fra due fermate successive.
- t f : tempo medio di fermata.
- c: decelerazione in fase di “coasting” (= R / M)
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
87
Spazio critico S c : spazio minimo affinché sia raggiunta la velocità
di regime.
V
Sc
a
tf
Calcolo:
b
Vcomm
t
tc
vR2 vR2
Sc =
+
2a 2b
VR
vR vR
tc =
+
a
b
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
vcomm
Sc
=
t f + tc
88
Caso S < S c : Forma triangolare (comincio a frenare prima di arrivare
alla velocità di regime).
V
a
S
tf
t
'2
S=
b
V
t
'
'2
v
v
+
2a 2b
Calcolo:
VR
'
⇒
ricavo
v' v'
t = +
a b
'
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
v'
vcomm
S
=
t f + t'
89
Caso S > S c : forma trapezia
tR
V
Vrunning
S
tf
Vr
b
a
Vcomm
t
vR2
vR2
Ricavo tR dalla seguente relazione: S =
+ vRtR +
2a
2b
vR
vR
Calcolo t: t = + t R +
a
b
S
S
vcomm =
Calcolo vrunning e vcomm: vrunning =
tf +t
t
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
90
90
Caso S > S c : forma con fase di lancio
a VR
c
Vrunning Vc b
tf
Vcomm
t
vR2 vR2 − vc2 vc2
Ricavo vc dalla seguente relazione: S =
+
+
2a
2c
2b
Calcolo t: t =
Calcolo vrunning e vcomm: vrunning =
v R v R − vc vc
+
+
a
c
b
S
t
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
vcomm =
S
tf +t
91
91
Caso S > S c : forma con fase di regime e di lancio
tR
VR
a
c
Vrunning
Vc b
Vcomm
tf
t
Fisso vc o tR e ricavo l’altra variabile dalla seguente
relazione:
vR2 − vc2 vc2
vR2
S=
+ vR tR +
+
2a
2c
2b
Calcolo t: t =
vR
v R − vc vc
+
+ tR +
a
c
b
Calcolo vrunning e vcomm:
vrunning
S
=
t
vcomm
S
=
tf +t
92
La forma con fase di lancio e di regime è considerata la migliore
perché:
•rappresenta un compromesso fra il diagramma migliore da un punto
di vista del livello di servizio (quello trapezio) e quello migliore da
un punto di vista energetico (quello con sola fase di lancio);
•rende soprattutto il servizio più affidabile in quanto permette il
recupero di ritardi accumulati alla fermate con la conseguenza di
mantenere la cadenza del servizio.
Vmax
v
VR
t
t
tf
t’
t’f
t’’f
t’’
93
Velocità commerciali di tratta e di linea
i
vcomm.
tratta
Si
= i
t
i
t i = trunning
+ t if
i
S
∑
vcomm. linea
L
=
=
i
i
t
t
∑ ∑
i
i
i
vesercizio
L
=
i
t
∑ + tm
i
Tempo di
manovra
Tgiro : è il tempo che trascorre fra due passaggi successivi, di uno stesso
mezzo, alla stessa fermata.
Tgiro = ∑ t i + t m + ∑ t i + t m
i
A→ B
i
B→A
Numero di mezzi a disposizione per eseguire il servizio
N
= f
Tgiro
passaggi/h
94
Per dimensionare il servizio parto dalla domanda.
In questo caso intendo per domanda : flusso massimo sulla parte di
linea più caricata (sull’arco o insieme di archi).
Esempio. Domanda: 1200 pass/h
Cmezzo f ≥ 1200
1424
3
Capacità della linea
per una data frequenza f
Scelgo un certo mezzo di trasporto.
Per esempio un autobus lungo (12m): Cmezzo = 85 pass
Però la domanda è una variabile aleatoria, ossia 1200 è un valore
medio: posso avere punte più alte. Inoltre non posso progettare per
un flusso corrispondente alla capacità.
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
95
f ≥ 1200 ⇒
0,85 Cmezzo
⇒
1200
= 16,6
(0,85 ⋅ 85)
f ≈ 17 passaggi / h
1
cadenza = ≈ 3,6 minuti
f
Dai diagrammi di trazione di ciascuna tratta (che posso eseguire
perché conosco le caratteristiche della linea e del veicolo da
trasporto) determino il tempo al giro:
Tgiro = ∑ t i + t m + ∑ t i + t m
i
N = Tgiro f
i
⇒
Ammettiamo che il tempo al giro
sia 80 minuti
80
N = 17 ≈ 23
60
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
Numero di mezzi per
eseguire il servizio
96
Diagramma di trazione con presenza di un semaforo fra due
fermate
F1
F2
S
100m
200m
Al semaforo S ho un tempo medio di ritardo che posso calcolare
con i metodi della Tecnica del Traffico: per esempio con la formula
di Webster:
c : ciclo (sec)
tritardo
medio
c(1 − λ )2
x
= 0,9
+
x
S
x
2
(
1
−
λ
)
2
λ
(
1
−
)
λ : g ( verde effettivo) / c
x = Q /(λS )
S : flusso di saturazione (veic/sec)
Q : portata veicolare (veic/sec).
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
97
VR
b
b
S1
tf
t F1 − S
S2
Vcomm
t ritardo
t S − F2
semaforo
S1 + S 2 = distanza fra due fermate successive
S1 + S 2
vcomm =
t f + t F1 − S + t ritardo + t S − F2
semaforo
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
98
Diagramma di trazione con presenza di “stop and go” fra
due fermate (schema)
50 km / h
30 km / h
15 km / h
tf
S3
S2
S1
Vcomm
(10 ÷ 15 sec)
(10 ÷ 15 sec)
S1 + S2 + S3 = distanza fra due fermate successive
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
99
Esempio: tratto di linea di 8 km: 40% con semaforo di cui la metà
con “stop and go”.
Tre diagrammi di trazione:
60% di 8 km, 4,8 km, non ho il semaforo:
VR
Vcomm
S
S = distanza fra due fermate successive
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
100
40% di 8 km= 3,2 km ho il semaforo
Di questi la metà, 1,6 km non ha lo “stop and go”:
VR
S1
tf
Vcomm
S2
t ritardo
semaforo
S1 + S 2 = distanza fra due fermate
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
101
1,6 km con semaforo e “stop and go”
V = 50 km / h
V = 30 km / h
V = 15 km / h
S1
tf
S2
vcomm
S3
S4
t ritardo
semaforo
S1 + S 2 = distanza fra prima fermata e semaforo
S3 + S 4 = distanza fra semaforo e successiva fermata
Lupi M., "Tecnica ed Economia dei Trasporti", Univ. Pisa , A.A. 2012-13.
102
Se faccio una corsia riservata e metto la priorità semaforica: annullo
lo “stop and go” e l’attesa al semaforo.
VR
Vcomm
Aumenta la velocità commerciale e perciò il livello del servizio offerto.
Inoltre diminuisce il tempo al giro TG
Se mantengo costante f diminuisce N: ossia diminuiscono i
N
= f mezzi (e gli autisti) necessari per eseguire il dato servizio.
TG
Se mantengo costante N aumenta f : quindi, oltre ad avere
una Vcomm
maggiore, ho una frequenza del servizio
maggiore e, di conseguenza, dei tempi di attesa, alle
fermate, minori. Aumenta il livello di servizio offerto.103