I.T.I.S “P. HENSEMBERGER”
Indirizzo Elettrotecnica e Automazione
A.S. 2007/2008
PROGETTAZIONE E
REALIZZAZIONE
DI UN ASCENSORE DIDATTICO
CONTROLLATO DA PLC
Alunno : Cester Fabio
Classe: 5B1
Supervisore lavoro Prof. Fransosa Pasquale
Docente responsabile Prof. Rizzaro Giuseppe
1
PDF created with pdfFactory trial version www.pdffactory.com
Indice
1 - Presentazione del progetto.................................pag 3
2 - Introduzione sull'ascensore................................pag 4
2.1 - Cenni storici...........................................pag 4
2.2 - Cenni teorici...........................................pag 5
3 - Cenni sul motore in corrente continua..................pag 6
3.1 - Motore a spazzole...................................pag 6
3.2 - Motore brushless....................................pag 7
4 – Normative......................................................pag 8
5 – Programmazione.............................................pag 10
5.1 - Cenni sul PLC........................................pag 10
5.2 - Virtual PLC............................................pag 11
5.2.1 - Progetto in linguaggio KOP e AWL...pag 11
5.3 – Moeller.................................................pag 16
5.3.1 – Descrizione del programma in linguaggio
ladder.........................................pag 18
6 - Realizzazione pratica........................................pag 19
6.1 – Progettazione........................................pag 19
6.2 – Materiali...............................................pag 19
PDF created with pdfFactory trial version www.pdffactory.com
6,3 – Assemblaggio........................................pag 19
7 - Apparecchi di manovra e protezione...................pag 20
1 – PRESENTAZIONE DEL PROGETTO
Il progetto che verrà sviluppato in questa relazione consiste nella progettazione,
simulazione e realizzazione di un ascensore in scala comandato da PLC.
Nella fase di progettazione è stato realizzato il programma per il PLC che andrà a
comandare tutti i dispositivi (motore, led), ed è stato dimensionato il possibile aspetto
che avrebbe dovuto avere l'ascensore una volta ultimato (anche se subirà molte
variazioni).
Nella fase di simulazione è stato caricato il programma realizzato in precedenza in un
simulatore virtuale ( Virtual PLC ) ed è stato verificato il corretto funzionamento.
Nella fase di realizzazione infine si è costruito un modellino in scala di ascensore
attraverso l'utilizzo di un alzacristalli elettrico per automobili.
2 – INTRODUZIONE SULL'ASCENSORE
2.1 – Cenni storici
Sicuramente una delle prime situazioni in cui si è sentita la necessità di
un’attrezzatura idonea a trasportare in verticale uomini e materiali è quella delle
miniere. Sono dell'inizio del XIX secolo i primi studi per dotare quei primitivi
apparecchi di un motore a vapore che sostituisse l'energia umana.
Il primo sviluppo fondamentale che si ebbe in direzione dell'ascensore come oggi è
conosciuto venne dato da un inventore americano, Elisha Otis, che nel 1853 depositò
il brevetto di un sistema di sicurezza paracadute, destinato ad impedire la caduta
violenta della cabina in caso di guasti o rotture ai cavi. La prima applicazione pratica si
ebbe nel 1857 a New York e, negli anni successivi, altri famosi ingegneri lo
perfezionarono con l'adozione di circuiti idraulici e con l'invenzione dell'ascensore
elettrico, fatta risalire al 1880 in Germania da parte di Werner von Siemens.
Una delle prime spettacolari applicazioni della nuova invenzione è quella vista nel
1889 in Francia in occasione della presentazione della Tour Eiffel a Parigi.
Le tappe più importanti nell'evoluzione dell'ascensore possono essere considerate
quelle dell'abolizione del manovratore, datata 1924, e successivamente l'introduzione
delle porte ad apertura automatica al posto di quelle manuali. Notevoli progressi si
sono registrati anche nel campo dei "quadri di manovra", deputati al controllo e alla
gestione dell'impianto. Superati gli obsoleti pannelli elettromeccanici senza particolari
flessibilità di funzionamento, i moderni sistemi elettronici con microprocessori
consentono un esercizio adattabile ad ogni genere di edificio ed utilizzo (prenotazioni
di chiamata, corse con arresti intermedi per "raccogliere" e "riempire" la cabina fino al
raggiungimento del massimo carico, ecc.).
Fra le ultime evoluzioni citiamo:
- la regolazione elettronica della velocità: oltre a rendere estremamente dolci
le fasi di avvio e fermata della cabina, permettono l'arresto della stessa
esattamente in corrispondenza del piano; questa è inoltre una condizione
necessaria al soddisfacimento delle ultime norme in materia di sicurezza (fra
PDF created with pdfFactory trial version www.pdffactory.com
-
-
le maggiori cause di incidente si registrano proprio gli inciampi sugli scalini
che si creano fra piano e cabina), e precisamente il raggiungimento di
adeguata precisione di fermata e di livellazione al piano, come richiesto dalla
norma per l'accessibilità degli ascensori anche ai disabili EN 81-70;
l'eliminazione del "vano o locale macchina" mediante lo spostamento di
motore, argano e apparecchiature di comando - realizzati in forma molto
compatta - all'interno del vano di corsa allo scopo di risparmiare spazio
all'interno dell'edificio;
la riduzione degli spazi verticali di sicurezza nel vano ascensore, in alto e/o
in basso, in modo da ridurre gli ingombri verticali dell'ascensore nell'edificio,
specie se preesistente.
2 – 2 Cenni teorici
Per ascensore si intende un apparecchio elevatore con installazione fissa che serve
piani definiti mediante una cabina che si sposta lungo guide rigide e la cui inclinazione
sull'orizzontale è superiore a 15 gradi, destinato al trasporto di persone.
Gli ascensori o elevatori (definizione dell'ultima direttiva comunitaria 95/16/CE del 29
giugno 1995 recepita in Italia con il D.P.R. n. 162 del 30 aprile 1999 ) possono essere:
-
Elettrici (a fune);
Oleodinamici (comunemente noti come idraulici poiché nei primi il fluido
usato era l'acqua).
L'ascensore elettrico moderno è composto principalmente dai seguenti elementi:
1. Macchinario di sollevamento (detto anche argano)
2. Cabina passeggeri
3. Contrappeso (che ha funzioni anche di bilanciamento con conseguente riduzione
della potenza elettrica impegnata e dei consumi energetici)
4. Funi di trazione
5. Quadro elettrico di manovra
6. Dispositivi di sicurezza comprendenti: Limitatore di velocità, Paracadute.
L'ascensore oleodinamico moderno è composto principalmente dai seguenti elementi:
1.
2.
3.
4.
5.
Centralina idraulica
Cilindro e pistone
Cabina passeggeri
Quadro elettrico di manovra
Dispositivi di sicurezza comprendenti: Paracadute, Valvola di blocco
6. Può inoltre comprendere anche delle funi d trazione.
I due azionamenti si differenziano nel modo con cui viene imposto il movimento. Con
un ascensore elettrico è il macchinario di sollevamento che trasmette il movimento
alle funi che reggono la cabina per mezzo dell'attrito sulla puleggia di frizione; il
motore elettrico funziona in entrambe le direzioni di marcia: salita e discesa.
Con un ascensore oleodinamico è la centralina idraulica che fornisce l'energia ad un
fluido per mezzo di una pompa di tipo volumetrico e di una serie di valvole
(generalmente un olio con speciali additivi) che muove a sua volta il pistone
permettendogli di fuoriuscire dal cilindro; in questo caso il motore elettrico funziona
quando la cabina va in salita poiché in discesa è la forza di gravità a muoverla.
Un ascensore che trasporta solamente materiali, senza che vi sia la possibilità di
PDF created with pdfFactory trial version www.pdffactory.com
accompagnamento umano, è definito montacarichi , e non è soggetto alla Direttiva
Ascensori, bensì alla Direttiva Macchine.
Un particolare e curioso tipo di ascensore a funzionamento continuo è il paternoster.
L'Italia è il paese con il maggior numero di ascensori al mondo - nel 2006 tra i
750.000 e gli 800.000 impianti - e se ne installano ogni anno da 15.000 a 20.000
nuovi.
In Italia gli impianti esistenti devono essere verificati ogni 2 anni (ovvero ogni qual
volta ci sia una rimessa in servizio a seguito di modifiche rilevanti, trasformazioni,
incidenti ecc.) da un ingegnere abilitato ed iscritto all'Albo facente capo ad un Ente
notificato che ha ottenuto l'autorizzazione ministeriale.
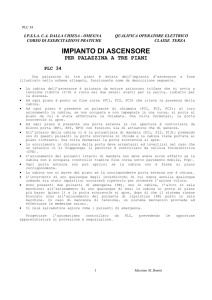
3 - CENNI SUL MOTORE IN CORRENTE CONTINUA
Illustrazione 1: Un semplice motore DC.
Quando la corrente scorre negli avvolgimenti, si genera un campo magnetico
intorno al rotore. La parte sinistra del rotore è respinta dal magnete di sinistra ed
attirata da quello di destra. Analogalmente fa la parte ina basso a destra. La
coppia genera la rotazione.
3.1 - Motore a spazzole
Il classico motore in corrente continua ha una parte che gira detta appunto rotore o
anche armatura e una parte che genera un campo magnetico fisso (nell'esempio i due
magneti colorati) detta statore. Un interruttore rotante detto commutatore o collettore
a spazzole inverte due volte ad ogni giro la direzione della corrente elettrica che
percorre i due avvolgimenti generando un campo magnetico che entra ed esce dalle
parti arrotondate dell'armatura. Nascono forze di attrazione e repulsione con i magneti
permanenti fissi (indicati con N ed S nelle figure).
La velocità di rotazione dipende da:
• Tensione applicata.
• Corrente assorbita dal rotore.
• Carico applicato.
La coppia generata è proporzionale alla corrente. Il controllo più semplice agisce sulla
tensione di alimentazione. Nei sistemi più complessi si usa un Controllo automatico in
retroazione che legge le variabili per generare la tensione da applicare al motore. Il
PDF created with pdfFactory trial version www.pdffactory.com
motore CC a magneti permanenti ha un comportamento reversibile: diventa un
generatore di corrente continua se si collega un altro motore all'albero. Si può allora
prelevare l'energia elettrica prodotta collegandosi alle spazzole.
Il suo limite principale è nella necessità del commutatore a spazzole:
• Le spazzole sono in grafite, mentre nei piccoli servomotori e nei tipi utilizzati
nei lettori CD/DVD o registratori a cassette sono in lega metallica bianca.
La differenza è nella frequenza della loro sostituzione, infatti nelle macchine
utensili come smerigliatrici o trapani, si utilizzano spazzole in grafite, perché è
molto semplice e veloce sostituirle, le spazzole in metallo, sono usate su
apparecchi dove risulta scomodo o non conveniente cambiarle, come nei motori
d'avviamento dei mezzi di trasporto.
• Le spazzole pongono un limite alla massima velocità di rotazione: maggiore è la
velocità e più forte è la pressione che bisogna esercitare su di esse per
mantenere un buon contatto, comunque i motori usati negli aspirapolvere e
negli elettroutensili portatili (trapani, mole, ect.) possono raggiungere i 3500045000 giri al minuto.
• Tra spazzole e collettore, nei momenti di commutazione, si hanno transitori di
apertura degli avvolgimenti induttivi e quindi scintillio (attenuabile con
opportuni sistemi ma non eliminabile).
• Queste scintille comportano disturbi elettrici sia irradiati nell'ambiente
circostante che trasmessi al generatore di tensione (che alimenta il motore);
questi disturbi, in determinati settori di impiego, possono causare problemi di
compatibilità elettromagnetica.
La presenza di avvolgimenti elettrici sul rotore ha anche due aspetti negativi:
• Se il motore è di grossa potenza si hanno dei problemi di smaltimento del
calore (gli avvolgimenti si riscaldano per effetto Joule e il campo magnetico
alternato nel nucleo del rotore genera altre perdite, causate da isteresi
magnetica e correnti parassite nel nucleo stesso, e quindi altro calore.
• Gli avvolgimenti appesantiscono il rotore (aumenta il momento d'inerzia): se il
motore deve rispondere con rapidità e precisione (come avviene nelle
automazioni industriali e nella robotica) il controllo diventa più complesso; per
piccole potenze (da 1 a 200W) e servocontrolli a volte si usano particolari tipi di
motori con rotore con avvolgimenti a forma di bicchiere e privo del nucleo di
ferro, detti "ironless": hanno bassa inerzia e rendimento elettrico più elevato dei
loro corrispondenti con rotore avvolto su nucleo di ferro.
3.2 - Motore brushless
I problemi illustrati si potrebbero evitare scambiando il rotore con lo statore (cioè se
gli avvolgimenti venissero messi sulla parte fissa e i magneti fossero montati sul
rotore). Scomparirebbe il collettore a spazzole, e gli avvolgimenti elettrici potrebbero
smaltire più facilmente il calore generato. È quello che si fa nei motori brushless (in
inglese letteralmente: senza spazzole). Essi permettono inoltre di ridurre
ulteriormente le dimensioni del rotore (e quindi le sue inerzie) usando materiali
magnetici più efficienti come le leghe di samario-cobalto. In questi motori il circuito
di alimentazione deve essere più sofisticato, dato che le funzioni del collettore
meccanico sono svolte tramite un controllo elettronico di potenza.
Motore CC con statore a filo avvolto
Nei motori CC lo statore può essere realizzato non con magneti permanenti ma,
similmente al rotore, con avvolgimenti su materiale ad alta permeabilità in cui viene
fatta scorrere della corrente: questo circuito è detto di eccitazione. In questo modo si
PDF created with pdfFactory trial version www.pdffactory.com
possono avere potenze maggiori (ma si dovrà spendere più energia anche per
alimentare questo nuovo circuito). Si possono avere vari casi nell'alimentazione del
circuito di statore:
• motore ad eccitazione indipendente: l'avvolgimento di statore è alimentato in
maniera indipendente da quello di rotore. Si ha allora più flessibilità nel
controllo dei parametri (coppia e velocità) del motore.
• motore ad eccitazione in parallelo: statore e rotore sono collegati in parallelo
(coppia maggiore, minore velocità)
• motore ad eccitazione in serie: statore e rotore sono collegati in serie (coppia
inferiore e asintotica allo zero con l'aumentare del regime, maggiore velocità,
definito anche come motore in fuga).
Si possono avere anche situazioni intermedie utilizzate in passato soprattutto nella
trazione elettrica (dove è richiesta molta coppia allo spunto e maggiore velocità a
regime).
Il motore con statore a filo avvolto può essere alimentato sia in corrente continua
che in alternata, e per questo motivo è chiamato anche motore universale; di fatto,
nella maggior parte delle applicazioni, questo tipo di motore è alimentato in corrente
alternata. La disponibilità a costi contenuti di dispositivi elettronici (come circuiti
integrati, ponti raddrizzatori, dispositivi di potenza a semiconduttore, ecc.), alcune
applicazioni che in passato sarebbero state realizzate con motori universali ora
vengono sviluppate con motori CC con magneti permanenti, permettendo ad esempio
un controllo della velocità più preciso e rendimento elettrico maggiore (nei piccoli
motori la potenza spesa per l'eccitazione è spesso rilevante, mentre diviene
percentualmente esigua nei grandi motori).
4 - NORMATIVE:
§
§
§
§
§
§
§
§
- G.U. n. L. 213 del 07.09.1995 - "Direttiva del Parlamento Europeo e del Consiglio,
del 29.06.1995, per il riavvicinamento delle legislazioni degli Stati Membri relative agli
ascensori".
D.P.R. 162/99 - G.U. n. 134 del 10.06.1999 - "Regolamento recante norme per
l'attuazione della Direttiva 95/16/CE sugli ascensori e di semplificazione dei
procedimenti per la concessione del nulla osta per ascensori e montacarichi nonché
della relativa licenza di esercizio".
D.P.R. 369/00 - G.U. n. 291 del 14.12.2000 - "Regolamento recante modifica al D.P.R.
n. 162/99 in materia di collaudo ascensori"
EN 81-1 - Ed. novembre 2005 - "Regole di sicurezza per la costruzione e l'installazione
degli ascensori. Parte 1: Ascensori elettrici".
EN 81-2 - Ed. novembre 2005 - "Regole di sicurezza per la costruzione e l'installazione
degli ascensori. Parte 2: Ascensori idraulici".
UNI 10411 - 1 - Ed. dicembre 2003 rev. all'ed. 09/1998 - "Modifiche ad ascensori
elettrici preesistenti".
UNI EN 81-28 - Ed. maggio 2004 - "Regole di sicurezza per la costruzione e
l'installazione degli ascensori - Ascensori per il trasporto di persone e merci Teleallarmi per ascensori e ascensori per merci".
Direttiva 95/16/CE UNI EN 81-70 - Ed. maggio 2004 - " Regole di sicurezza per la
costruzione e l'installazione degli ascensori - Applicazioni particolari per ascensori per
passeggeri e per merci - Accessibilità agli ascensori delle persone, comprese i
disabili".
PDF created with pdfFactory trial version www.pdffactory.com
§
§
§
§
§
§
§
§
§
UNI EN 81-72 - Ed. maggio 2004 - " Regole di sicurezza per la costruzione e
l'installazione degli ascensori – Applicazioni particolari per ascensori per passeggeri e
merci - Ascensori antincendio".
UNI EN 81-80 - Ed. maggio 2004 - " Regole di sicurezza per la costruzione e
l'installazione degli ascensori - Ascensori esistenti - Regole per il miglioramento della
sicurezza degli ascensori per passeggeri e degli ascensori per merci esistenti".
UNI EN 13015 - Ed. maggio 2002 corretta il 19.06.2002 - " Manutenzione di ascensori
e scale mobili. Regole per le istruzioni di manutenzione".
UNI EN 12015 e UNI EN 12016 - Ed. luglio 1999 - "Compatibilità elettromagnetica.
Norma per famiglia di prodotti per ascensori, scale mobili e marciapiedi mobili.
Emissione e immunità".
D.P.R. 459/96 - Ed. luglio 1996 - "Regolamento per l'attuazione delle direttive
89/392/CEE, 91/368/CEE, 93/44/CEE e 93/68/CEE concernenti il riavvicinamento delle
legislazioni degli Stati Membri relative alle macchine".
LEGGE 13/89 - G.U. n. 21 del 26.01.1989 - "Disposizioni per favorire il superamento e
l'eliminazione delle barriere architettoniche negli edifici privati".
D.M. 236/89 - G.U. n. 145 del 23.06.1989 - "Prescrizioni tecniche necessarie a
garantire l'accessibilità, l'adattabilità e la visibilità degli edifici privati e di edilizia
residenziale pubblica sovvenzionata e agevolata, ai fini del superamento e
l'eliminazione delle barriere architettoniche".
D.M. 587/87 - G.U. n. 71 del 25.03.1988 - "Attuazione delle direttive n. 84/528/CEE e
n. 86/312/CEE relative agli ascensori elettrici".
D.P.R. 1467/63 - G.U. n. 298 del 16.11.1963 - "Norme per gli ascensori ed i
montacarichi in servizio privato".
Dalla Gazzetta Ufficiale del 23 giugno del 1989 sono stati definiti i seguenti
punti:
L’ascensore deve avere una cabina di dimensioni minime tali da permettere l’uso da
parte di una persona su sedia a rotelle.
Le porte di cabina e di piano devono essere di tipo automatico e di dimensioni tali da
permettere l’accesso alla sedia a ruote.
Nell’interno della cabina devono essere posti un citofono, un campanello d’allarme,
una luce di emergenza.
Il ripiano di fermata, anteriormente alla porta della cabina deve avere una profondità
tale da contenere una sedia a ruote e le manovre per l’accesso.
Deve essere prevista la segnalazione sonora dell’arrivo al piano e un dispositivo
luminoso per segnalare ogni eventuale stato di allarme.
Le porte di cabina e di piano devono essere del tipo a scorrimento automatico.
Nel caso di adeguamento la porta può essere incernierata purchè dotata di sistema
per apertura automatica.
In tutti i casi le porte devono rimanere aperte per almeno 8 secondi e il tempo di
chiusura non deve essere inferiore ai 4 sec.
L’arresto dei piani deve avvenire con autolivellamento con tolleranza max. di + 2 cm.
La bottoniera di comando interna ed esterna deve avere i bottoni ad una altezza
compresa tra 1.10 e 1.40 m e deve essere posta su una parete ad almeno 35 cm
dalla porta della cabina.
I pulsanti di comando devono prevedere la numerazione in rilievo e le scritte con
traduzione in Braille.
Si deve prevedere la segnalazione sonora dell’arrivo al piano e, ove possibile ,
l’installazione di un sedile ribaltabile con ritorno automatico.
PDF created with pdfFactory trial version www.pdffactory.com
5 - PROGRAMMAZIONE
5.1 - CENNI SUL PLC:
Il PLC è un controllore a logica programmabile (Programmable Logic Controller) è un
computer industriale specializzato in origine nella gestione dei processi industriali. Il
PLC esegue un programma ed elabora i segnali digitali ed analogici provenienti da
sensori e diretti agli attuatori presenti in un impianto industriale, nel tempo, è
entrato anche nell'uso domestico; l'installazione di un PLC nel quadro elettrico di
un'abitazione, a valle dell’interruttore magnetotermico e differenziale, permette la
gestione automatica dei molteplici sistemi e impianti installati nella casa: impianto di
riscaldamento, antifurto, irrigazione, luci, ecc...
Un PLC è composto da un alimentatore, dalla CPU che in certi casi può avere interna
o esterna una memoria RAM o Flash o EPROM, da un certo numero di schede di
ingressi digitali e uscite digitali, e nel caso in cui sia necessario gestire grandezze
analogiche, il PLC può ospitare delle schede di ingresso o di uscita sia analogiche che
digitali.
L’alimentatore:
Fornisce le tensioni a 5 V necessarie alle schede, le tensioni a + o - 12 V, le altre
tensioni necessarie, sempre in corrente continua (cc.). Può essere interno o esterno
al PLC.
La CPU
È il cervello del PLC. La CPU è una scheda complessa basata su un microprocessore
con un sistema operativo proprietario, e con una zona di memoria a disposizione del
programma utente, cioè del programma di automazione. Una delle caratteristiche
proprie delle CPU dei PLC è la loro capacità di poter gestire le modifiche del
programma di gestione del processo durante il normale funzionamento. Questa
possibilità è estremamente utile nel caso di impianti che devono essere sempre attivi.
I moduli di ingresso/uscita:
I moduli di ingresso uscita costituiscono l’interfaccia del PLC con il processo da
controllare. Questi moduli possono trattare segnali di tipo analogico o digitale. Il
motivo della presenza di moduli specializzati consiste nel fatto che i segnali generati
dai trasduttori, anche quelli ad uscita logica, non possono venire direttamente
interfacciati alla elettronica del modulo processore, a causa di differenze nel livello di
segnale o tipologia. Ciascun ingresso ed uscita dei moduli di I/O (via di
ingresso/uscita) è identificata dal sistema operativo del PLC in base alla posizione che
occupa. Questo significa che non è possibile riconfigurare dinamicamente le vie del
PLC ma queste sono fissate al momento del cablaggio. I moduli assicurano le
funzionalità di filtraggio (analogico e digitale) degli ingressi e la protezione contro
sovratensioni ed inversione di polarità degli ingressi.
La memoria del PLC :
Per poter memorizzare il programma da eseguire e i dati che ne derivano il PLC
PDF created with pdfFactory trial version www.pdffactory.com
necessita di memorie , i tipi di memorie sono:
Memoria Statica
Nei PLC di prima concezione la memoria era di tipo Statico, quindi all'utente erano
assegnate delle aree "preconfezionate" con quantitativi fissi di dati memorizzabili
all'interno, e che non potevano essere cambiati in alcun modo. La memoria era
rigidamente divisa tra dati e programmi ed anche tra tipi diversi di dati. Questo
sistema è ancora ampiamente usato per piccoli PLC con applicazioni semplici e pochi
ingressi e uscite da gestire, dove la gestione della memoria in un modo piuttosto che
in un altro non influisce nel risultato.
Memoria Dinamica
Nei PLC più moderni la memoria interna è di tipo Dinamico, e può essere considerata
come un Hard Disk di un Personal Computer, con file di dati e file di programmi. In
fase di caricamento del software applicativo il PLC alloca dinamicamente la memoria a
seconda delle risorse che sono richieste. A parte certe aree di sistema, ed alcune aree
preconfezionate al fine di facilitare la programmazione ai meno esperti, la memoria
per il resto è liberamente configurabile. Si possono decidere nuove aree dati, anche
dello stesso tipo, ma usate da sottoprogrammi diversi ed in fasi diverse. Ogni area
dati può avere un nome, denominato Nome File. Per i programmi valgono le stesse
considerazioni.
5.2 - VIRTUALPLC:
VirtualPLC è un programma che permette di simulare delle utilizzazioni varie del PLC.
Tramite questo programma di simulazione noi abbiamo realizzato il programma di
funzionamento di un ascensore.
5.2.1 - PROGETTO IN LINGUAGGIO KOP e AWL:
Linguaggio KOP:
Ladder diagram (KOP) detto Linguaggio a contatti - È il linguaggio più usato fino a
pochi anni fa, in quanto era la trasposizione informatica dei circuiti elettrici usati dagli
elettrotecnici.
L'automazione industriale, infatti, era basata su sistemi a logica cablata, il PLC ha
permesso di trasportare i concetti della logica cablata nel linguaggio Ladder. Il
programmatore semplicemente utilizza simboli logici corrispondenti a segnali di
ingresso e di uscita per implementare la logica non più cablando i relè, ma disegnando
gli schemi elettrici.
Linguaggio AWL: Instruction List (AWL) detto Lista di istruzioni - Linguaggio di
semplice molto simile all'Assembler. Può essere facilmente ricavato dal Ladder.
PDF created with pdfFactory trial version www.pdffactory.com
Linguaggio KOP:
PDF created with pdfFactory trial version www.pdffactory.com
PDF created with pdfFactory trial version www.pdffactory.com
PDF created with pdfFactory trial version www.pdffactory.com
Tabella input/output:
Simobolo
Indirizzo
Commento
SQ1
I0,0
Micro (NC) presenza cabina piano Terra
SQ2
I0,1
Micro (NC) presenza cabina 1° Piano
SQ3
I0,2
Micro (NC) presenza cabina 2° Piano
SQ4
I0,3
Micro (NC) presenza cabina 3° Piano
SQ5
I0,4
Micro (NO) Porte chiuse
SB1
I0,5
Pulsante (NO) Chiamata piando Terra
SB2
I0,6
Pulsante (NO) Chiamata 1° Piano
SB3
I0,7
Pulsante (NO) Chiamata 2° Piano
SB4
I1,0
Pulsante (NO) Chiamata 3° Piano
SB5
I1,1
Pulsante (NO) arresto cabina
SB6
I1,2
Pulsante (NO) Mandata 3° Piano
SB7
I1,3
Pulsante (NO) Mandata 2° Piano
SB8
I1,4
Pulsante (NO) Mandata 1° Piano
SB9
I1,5
Pulsante (NO) Mandata piano Terra
B1
I1,6
Contatto (NO) Fotocellula presenza persone
SQ6
I1,7
Micro (NC) apertura Porte
KM1
Q0,0
Teleruttore Salita cabina
KM2
Q0,1
Teleruttore Discesa cabina
KM3
Q0,2
Teleruttore Chiusura porte
KM4
Q0,3
Teleruttore Apertura porte
HL1
Q0,4
Lampada Piano Terra
HL2
Q0,5
Lampada 1° Piano
HL3
Q0,6
Lampada 2° Piano
HL4
Q0,7
Lampada 3° Piano
HL5
Q1,0
Lampada Cabina 3° Piano
HL6
Q1,1
Lampada Cabina 2° Piano
HL7
Q1,2
Lampada Cabina 1° Piano
HL8
Q1,3
Lampada Cabina piano Terra
PDF created with pdfFactory trial version www.pdffactory.com
5.3 - MOELLER:
Poiché Virtual PLC è un programma esclusivamente virtuale e non è possibile eseguire
il download del progetto su nessun PLC abbiamo dovuto utilizzare un software
alternativo.
Il software da noi utilizzato è easy soft 5 della MOELLER che ha la possibilità di
interfacciarsi con il PLC in dotazione alla scuola.
PDF created with pdfFactory trial version www.pdffactory.com
PDF created with pdfFactory trial version www.pdffactory.com
PDF created with pdfFactory trial version www.pdffactory.com
Tabella input/output
Simbolo
Indirizzo
Commento
Pulsante P:T
I0,1
Pulsante (NO) chiamata piano terra
Pulsante P 1°
I0,2
Pulsante (NO) chiamata 1° piano
Pulsante P 2°
I0,3
Pulsante (NO) chiamata 2° piano
Stop
I0,4
Interruttore arresto motore
F:C. P.T.
I0,7
Micro (NO) presenza piano terra
F.C. P.1°
I0,8
Fotocellula (NO) presenza 1° P
F.C. P.2°
I0,9
Micro (NO) presenza 2° piano
Comm. discesa
Q0,1
Commutazione motore per la discesa
Comm. salita
Q0,2
Commutazione motore per la salita
Led P.T
Q0,3
Segnalazione di presenza piano terra
Led P.1°
Q0,4
Segnalazione di presenza 1° P
Led P.2°
Q0,5
Segnalazione di presenza 2° P
5.3.1 - Descrizione del programma in linguaggio ladder:
Nelle prime sei stringhe di comando ci sono le informazioni il che serviranno per
mettere in funzione il motore, nelle prime tre stringhe con la funzione di discesa, in
quelle successive per la salita. In queste stringhe come primo componente viene
inserito il dispositivo (finecorsa, fotocellula) che ci permette di capire in che piano si
trova la cabina in un preciso istante, successivamente viene posizionato il pulsante
per la scelta del piano a cui si vuole andare e per far si che la cabina si fermi viene
messo il finecorsa (in questo caso normalmente chiuso) in modo che nel momento in
cui viene attivato apre il circuito di attivazione del motore.
Nelle stringhe sette e otto si può vedere nel dettaglio quali merker attivano la
commutazione di salita e quella di discesa. In entrambe viene inserito un interruttore
(con comando manuale) che ha la funzione di tagliare l'alimentazione al motore in
caso di problemi (ad esempio se il motore non dovesse più rispondere ai comandi e
quindi proseguire il movimento nonostante sia alla fine della guida predisposta al
movimento) senza la necessità di scollegare il PLC.
Nell'ultima parte di programma è presente la segnalazione di presenza al piano in cui
si trova la nostra cabina, quindi ci sarà il finecorsa di ogni piano che dara il seganle al
rispettivo led .
PDF created with pdfFactory trial version www.pdffactory.com
6 - REALIZZAZIONE PRATICA
6.1 - PROGETTAZIONE
Questo progetto è stato sviluppato partendo da una esercitazione svolta nel
laboratorio di sistemi tramite l'utilizzo del programma Virtual PLC che permette di
simulare il funzionamento di un ascensore.
Successivamente si è deciso di realizzare un prototipo di un ascensore.
I problemi nella progettazione sono stati riscontrati sin dall'inizio, nella scelta delle
dimensioni che avrà l'ascensore una volta unltimato, successivamente la scelta del
motore ( m.c.c.; alzacristalli elettrico per automobili; motore di un'antenna per
automobili).
Questi sono due dei problemi che sono stati risolti, mentre uno che non è stato
superato è la realizzazione delle porte e della loro apertura.
6.2 - Materiali:
Alzacristalli per automobile (m.c.c. con sistema di carrucole per il movimento)
Scatola PLC (alimentatore, PLC, gruppo relè, 3 pulsanti, 3 deviatori)
Plexiglas
Base in legno
n° 4 Angolari in alluminio
n° 3 Led
n° 3 Resistenze 2,2 kohm
n° 1 Cabina (in PVC)
n° 1 Fotocellula
n° 2 Microinterruttori (finecorsa)
n° 3 Pulsanti (prelevati da un lettore DVD)
n°2 Morsettiere
Capicorda
6.3 - Costruzione:
Sulla base in legno è stata realizzata una struttura in plexiglas nella quale è stato
inserito il nostro ascensore.
Sul pannello frontale sono stati posizionati: tre pulsanti per effettuare la chiamata al
piano desiderato della cabina; tre led per indicare la presenza al piano.
Per l'arresto della cabina sono stati posizionati due finecorsa per i piani estremi (piano
terra; 2° piano) mentre per il piano centrale e stata posizionata una fotocellula.
Il movimento è realizzato da un alzacristalli sul quale è fissata la cabina.
PDF created with pdfFactory trial version www.pdffactory.com
7 – APPARECCHI DI MANOVRA E PROTEZIONE
Un apparecchio di mavrova è un dispositivo in grado di eseguire manovre di apertura
e di chiusura di un circuito.
Le manovre posso avvenire a carico, ossia in presenza di corrente nel circuito, oppure
a vuoto, in assenza di corrente in quanto il circuito è interrotto in un altro punto.
L'apertura a carico interrompe la corrente, mentre la chiusura a carico stabilisce la
corrente nel circuito. Le manovre possono anche avvenire in condizioni di normale
esercizio oppure in condizioni di funzionamento anormale, a causa di guasti
sull'impianto. In relazione al tipo di comando si distingue il comando manuale,
effettuato dall'operatore, dal comando automatico, determinato dall'intervento di un
dispositivo di protezione o da un sistema di controllo.
Accoppiando apparecchi di manovra e dispositivi di protezione dalle sovracorrenti
(fusibili, sganciatori di massima corrente) si ottengono apparecchiature di manovra e
protezione contro sovraccarichi e corto circuiti.
Nel prototipo realizzato è stato inserito un interruttore in serie all'alimentazione, e
un'altro interruttore (che in realtà sarebbe un deviatore a tre posizioni collegato per
funzionare in modalità on-off) che tramite la programmazione del PLC va ad
intervenire sull'alimentazione del motore, mantenendo così in funzione tutte le altre
apparecchiature.
PDF created with pdfFactory trial version www.pdffactory.com
I.T.I.S “P. HENSEMBERGER”
Indirizzo Elettrotecnica e Automazione
A.S. 2007/2008
PROGETTAZIONE E
REALIZZAZIONE
DI UN ASCENSORE DIDATTICO
CONTROLLATO DA PLC
Alunno : Cester Fabio
Classe: 5B1
Supervisore lavoro Prof. Fransosa Pasquale
Docente responsabile Prof. Rizzaro Giuseppe
1
PDF created with pdfFactory trial version www.pdffactory.com
Indice
1 - Presentazione del progetto.................................pag 3
2 - Introduzione sull'ascensore................................pag 4
2.1 - Cenni storici...........................................pag 4
2.2 - Cenni teorici...........................................pag 5
3 - Cenni sul motore in corrente continua..................pag 6
3.1 - Motore a spazzole...................................pag 6
3.2 - Motore brushless....................................pag 7
4 – Normative......................................................pag 8
5 – Programmazione.............................................pag 10
5.1 - Cenni sul PLC........................................pag 10
5.2 - Virtual PLC............................................pag 11
5.2.1 - Progetto in linguaggio KOP e AWL...pag 11
5.3 – Moeller.................................................pag 16
5.3.1 – Descrizione del programma in linguaggio
ladder.........................................pag 18
6 - Realizzazione pratica........................................pag 19
6.1 – Progettazione........................................pag 19
6.2 – Materiali...............................................pag 19
6,3 – Assemblaggio........................................pag 19
7 - Apparecchi di manovra e protezione...................pag 20
PDF created with pdfFactory trial version www.pdffactory.com
1 – PRESENTAZIONE DEL PROGETTO
Il progetto che verrà sviluppato in questa relazione consiste nella progettazione,
simulazione e realizzazione di un ascensore in scala comandato da PLC.
Nella fase di progettazione è stato realizzato il programma per il PLC che andrà a
comandare tutti i dispositivi (motore, led), ed è stato dimensionato il possibile aspetto
che avrebbe dovuto avere l'ascensore una volta ultimato (anche se subirà molte
variazioni).
Nella fase di simulazione è stato caricato il programma realizzato in precedenza in un
simulatore virtuale ( Virtual PLC ) ed è stato verificato il corretto funzionamento.
Nella fase di realizzazione infine si è costruito un modellino in scala di ascensore
attraverso l'utilizzo di un alzacristalli elettrico per automobili.
2 – INTRODUZIONE SULL'ASCENSORE
2.1 – Cenni storici
Sicuramente una delle prime situazioni in cui si è sentita la necessità di
un’attrezzatura idonea a trasportare in verticale uomini e materiali è quella delle
miniere. Sono dell'inizio del XIX secolo i primi studi per dotare quei primitivi
apparecchi di un motore a vapore che sostituisse l'energia umana.
Il primo sviluppo fondamentale che si ebbe in direzione dell'ascensore come oggi è
conosciuto venne dato da un inventore americano, Elisha Otis, che nel 1853 depositò
il brevetto di un sistema di sicurezza paracadute, destinato ad impedire la caduta
violenta della cabina in caso di guasti o rotture ai cavi. La prima applicazione pratica si
ebbe nel 1857 a New York e, negli anni successivi, altri famosi ingegneri lo
perfezionarono con l'adozione di circuiti idraulici e con l'invenzione dell'ascensore
elettrico, fatta risalire al 1880 in Germania da parte di Werner von Siemens.
Una delle prime spettacolari applicazioni della nuova invenzione è quella vista nel
1889 in Francia in occasione della presentazione della Tour Eiffel a Parigi.
Le tappe più importanti nell'evoluzione dell'ascensore possono essere considerate
quelle dell'abolizione del manovratore, datata 1924, e successivamente l'introduzione
delle porte ad apertura automatica al posto di quelle manuali. Notevoli progressi si
sono registrati anche nel campo dei "quadri di manovra", deputati al controllo e alla
gestione dell'impianto. Superati gli obsoleti pannelli elettromeccanici senza particolari
flessibilità di funzionamento, i moderni sistemi elettronici con microprocessori
consentono un esercizio adattabile ad ogni genere di edificio ed utilizzo (prenotazioni
di chiamata, corse con arresti intermedi per "raccogliere" e "riempire" la cabina fino al
raggiungimento del massimo carico, ecc.).
Fra le ultime evoluzioni citiamo:
- la regolazione elettronica della velocità: oltre a rendere estremamente dolci
le fasi di avvio e fermata della cabina, permettono l'arresto della stessa
esattamente in corrispondenza del piano; questa è inoltre una condizione
necessaria al soddisfacimento delle ultime norme in materia di sicurezza (fra
le maggiori cause di incidente si registrano proprio gli inciampi sugli scalini
che si creano fra piano e cabina), e precisamente il raggiungimento di
adeguata precisione di fermata e di livellazione al piano, come richiesto dalla
norma per l'accessibilità degli ascensori anche ai disabili EN 81-70;
- l'eliminazione del "vano o locale macchina" mediante lo spostamento di
PDF created with pdfFactory trial version www.pdffactory.com
-
motore, argano e apparecchiature di comando - realizzati in forma molto
compatta - all'interno del vano di corsa allo scopo di risparmiare spazio
all'interno dell'edificio;
la riduzione degli spazi verticali di sicurezza nel vano ascensore, in alto e/o
in basso, in modo da ridurre gli ingombri verticali dell'ascensore nell'edificio,
specie se preesistente.
2 – 2 Cenni teorici
Per ascensore si intende un apparecchio elevatore con installazione fissa che serve
piani definiti mediante una cabina che si sposta lungo guide rigide e la cui inclinazione
sull'orizzontale è superiore a 15 gradi, destinato al trasporto di persone.
Gli ascensori o elevatori (definizione dell'ultima direttiva comunitaria 95/16/CE del 29
giugno 1995 recepita in Italia con il D.P.R. n. 162 del 30 aprile 1999 ) possono essere:
-
Elettrici (a fune);
Oleodinamici (comunemente noti come idraulici poiché nei primi il fluido
usato era l'acqua).
L'ascensore elettrico moderno è composto principalmente dai seguenti elementi:
1. Macchinario di sollevamento (detto anche argano)
2. Cabina passeggeri
3. Contrappeso (che ha funzioni anche di bilanciamento con conseguente riduzione
della potenza elettrica impegnata e dei consumi energetici)
4. Funi di trazione
5. Quadro elettrico di manovra
6. Dispositivi di sicurezza comprendenti: Limitatore di velocità, Paracadute.
L'ascensore oleodinamico moderno è composto principalmente dai seguenti elementi:
1.
2.
3.
4.
5.
Centralina idraulica
Cilindro e pistone
Cabina passeggeri
Quadro elettrico di manovra
Dispositivi di sicurezza comprendenti: Paracadute, Valvola di blocco
6. Può inoltre comprendere anche delle funi d trazione.
I due azionamenti si differenziano nel modo con cui viene imposto il movimento. Con
un ascensore elettrico è il macchinario di sollevamento che trasmette il movimento
alle funi che reggono la cabina per mezzo dell'attrito sulla puleggia di frizione; il
motore elettrico funziona in entrambe le direzioni di marcia: salita e discesa.
Con un ascensore oleodinamico è la centralina idraulica che fornisce l'energia ad un
fluido per mezzo di una pompa di tipo volumetrico e di una serie di valvole
(generalmente un olio con speciali additivi) che muove a sua volta il pistone
permettendogli di fuoriuscire dal cilindro; in questo caso il motore elettrico funziona
quando la cabina va in salita poiché in discesa è la forza di gravità a muoverla.
Un ascensore che trasporta solamente materiali, senza che vi sia la possibilità di
accompagnamento umano, è definito montacarichi , e non è soggetto alla Direttiva
Ascensori, bensì alla Direttiva Macchine.
Un particolare e curioso tipo di ascensore a funzionamento continuo è il paternoster.
L'Italia è il paese con il maggior numero di ascensori al mondo - nel 2006 tra i
750.000 e gli 800.000 impianti - e se ne installano ogni anno da 15.000 a 20.000
nuovi.
PDF created with pdfFactory trial version www.pdffactory.com
In Italia gli impianti esistenti devono essere verificati ogni 2 anni (ovvero ogni qual
volta ci sia una rimessa in servizio a seguito di modifiche rilevanti, trasformazioni,
incidenti ecc.) da un ingegnere abilitato ed iscritto all'Albo facente capo ad un Ente
notificato che ha ottenuto l'autorizzazione ministeriale.
3 - CENNI SUL MOTORE IN CORRENTE CONTINUA
Illustrazione 1: Un semplice motore DC.
Quando la corrente scorre negli avvolgimenti, si genera un campo magnetico
intorno al rotore. La parte sinistra del rotore è respinta dal magnete di sinistra ed
attirata da quello di destra. Analogalmente fa la parte ina basso a destra. La
coppia genera la rotazione.
3.1 - Motore a spazzole
Il classico motore in corrente continua ha una parte che gira detta appunto rotore o
anche armatura e una parte che genera un campo magnetico fisso (nell'esempio i due
magneti colorati) detta statore. Un interruttore rotante detto commutatore o collettore
a spazzole inverte due volte ad ogni giro la direzione della corrente elettrica che
percorre i due avvolgimenti generando un campo magnetico che entra ed esce dalle
parti arrotondate dell'armatura. Nascono forze di attrazione e repulsione con i magneti
permanenti fissi (indicati con N ed S nelle figure).
La velocità di rotazione dipende da:
• Tensione applicata.
• Corrente assorbita dal rotore.
• Carico applicato.
La coppia generata è proporzionale alla corrente. Il controllo più semplice agisce sulla
tensione di alimentazione. Nei sistemi più complessi si usa un Controllo automatico in
retroazione che legge le variabili per generare la tensione da applicare al motore. Il
motore CC a magneti permanenti ha un comportamento reversibile: diventa un
generatore di corrente continua se si collega un altro motore all'albero. Si può allora
prelevare l'energia elettrica prodotta collegandosi alle spazzole.
Il suo limite principale è nella necessità del commutatore a spazzole:
• Le spazzole sono in grafite, mentre nei piccoli servomotori e nei tipi utilizzati
nei lettori CD/DVD o registratori a cassette sono in lega metallica bianca.
La differenza è nella frequenza della loro sostituzione, infatti nelle macchine
PDF created with pdfFactory trial version www.pdffactory.com
utensili come smerigliatrici o trapani, si utilizzano spazzole in grafite, perché è
molto semplice e veloce sostituirle, le spazzole in metallo, sono usate su
apparecchi dove risulta scomodo o non conveniente cambiarle, come nei motori
d'avviamento dei mezzi di trasporto.
• Le spazzole pongono un limite alla massima velocità di rotazione: maggiore è la
velocità e più forte è la pressione che bisogna esercitare su di esse per
mantenere un buon contatto, comunque i motori usati negli aspirapolvere e
negli elettroutensili portatili (trapani, mole, ect.) possono raggiungere i 3500045000 giri al minuto.
• Tra spazzole e collettore, nei momenti di commutazione, si hanno transitori di
apertura degli avvolgimenti induttivi e quindi scintillio (attenuabile con
opportuni sistemi ma non eliminabile).
• Queste scintille comportano disturbi elettrici sia irradiati nell'ambiente
circostante che trasmessi al generatore di tensione (che alimenta il motore);
questi disturbi, in determinati settori di impiego, possono causare problemi di
compatibilità elettromagnetica.
La presenza di avvolgimenti elettrici sul rotore ha anche due aspetti negativi:
• Se il motore è di grossa potenza si hanno dei problemi di smaltimento del
calore (gli avvolgimenti si riscaldano per effetto Joule e il campo magnetico
alternato nel nucleo del rotore genera altre perdite, causate da isteresi
magnetica e correnti parassite nel nucleo stesso, e quindi altro calore.
• Gli avvolgimenti appesantiscono il rotore (aumenta il momento d'inerzia): se il
motore deve rispondere con rapidità e precisione (come avviene nelle
automazioni industriali e nella robotica) il controllo diventa più complesso; per
piccole potenze (da 1 a 200W) e servocontrolli a volte si usano particolari tipi di
motori con rotore con avvolgimenti a forma di bicchiere e privo del nucleo di
ferro, detti "ironless": hanno bassa inerzia e rendimento elettrico più elevato dei
loro corrispondenti con rotore avvolto su nucleo di ferro.
3.2 - Motore brushless
I problemi illustrati si potrebbero evitare scambiando il rotore con lo statore (cioè se
gli avvolgimenti venissero messi sulla parte fissa e i magneti fossero montati sul
rotore). Scomparirebbe il collettore a spazzole, e gli avvolgimenti elettrici potrebbero
smaltire più facilmente il calore generato. È quello che si fa nei motori brushless (in
inglese letteralmente: senza spazzole). Essi permettono inoltre di ridurre
ulteriormente le dimensioni del rotore (e quindi le sue inerzie) usando materiali
magnetici più efficienti come le leghe di samario-cobalto. In questi motori il circuito
di alimentazione deve essere più sofisticato, dato che le funzioni del collettore
meccanico sono svolte tramite un controllo elettronico di potenza.
Motore CC con statore a filo avvolto
Nei motori CC lo statore può essere realizzato non con magneti permanenti ma,
similmente al rotore, con avvolgimenti su materiale ad alta permeabilità in cui viene
fatta scorrere della corrente: questo circuito è detto di eccitazione. In questo modo si
possono avere potenze maggiori (ma si dovrà spendere più energia anche per
alimentare questo nuovo circuito). Si possono avere vari casi nell'alimentazione del
circuito di statore:
• motore ad eccitazione indipendente: l'avvolgimento di statore è alimentato in
maniera indipendente da quello di rotore. Si ha allora più flessibilità nel
controllo dei parametri (coppia e velocità) del motore.
• motore ad eccitazione in parallelo: statore e rotore sono collegati in parallelo
(coppia maggiore, minore velocità)
PDF created with pdfFactory trial version www.pdffactory.com
• motore ad eccitazione in serie: statore e rotore sono collegati in serie (coppia
inferiore e asintotica allo zero con l'aumentare del regime, maggiore velocità,
definito anche come motore in fuga).
Si possono avere anche situazioni intermedie utilizzate in passato soprattutto nella
trazione elettrica (dove è richiesta molta coppia allo spunto e maggiore velocità a
regime).
Il motore con statore a filo avvolto può essere alimentato sia in corrente continua
che in alternata, e per questo motivo è chiamato anche motore universale; di fatto,
nella maggior parte delle applicazioni, questo tipo di motore è alimentato in corrente
alternata. La disponibilità a costi contenuti di dispositivi elettronici (come circuiti
integrati, ponti raddrizzatori, dispositivi di potenza a semiconduttore, ecc.), alcune
applicazioni che in passato sarebbero state realizzate con motori universali ora
vengono sviluppate con motori CC con magneti permanenti, permettendo ad esempio
un controllo della velocità più preciso e rendimento elettrico maggiore (nei piccoli
motori la potenza spesa per l'eccitazione è spesso rilevante, mentre diviene
percentualmente esigua nei grandi motori).
4 - NORMATIVE:
§
§
§
§
§
§
§
§
§
§
§
§
- G.U. n. L. 213 del 07.09.1995 - "Direttiva del Parlamento Europeo e del Consiglio,
del 29.06.1995, per il riavvicinamento delle legislazioni degli Stati Membri relative agli
ascensori".
D.P.R. 162/99 - G.U. n. 134 del 10.06.1999 - "Regolamento recante norme per
l'attuazione della Direttiva 95/16/CE sugli ascensori e di semplificazione dei
procedimenti per la concessione del nulla osta per ascensori e montacarichi nonché
della relativa licenza di esercizio".
D.P.R. 369/00 - G.U. n. 291 del 14.12.2000 - "Regolamento recante modifica al D.P.R.
n. 162/99 in materia di collaudo ascensori"
EN 81-1 - Ed. novembre 2005 - "Regole di sicurezza per la costruzione e l'installazione
degli ascensori. Parte 1: Ascensori elettrici".
EN 81-2 - Ed. novembre 2005 - "Regole di sicurezza per la costruzione e l'installazione
degli ascensori. Parte 2: Ascensori idraulici".
UNI 10411 - 1 - Ed. dicembre 2003 rev. all'ed. 09/1998 - "Modifiche ad ascensori
elettrici preesistenti".
UNI EN 81-28 - Ed. maggio 2004 - "Regole di sicurezza per la costruzione e
l'installazione degli ascensori - Ascensori per il trasporto di persone e merci Teleallarmi per ascensori e ascensori per merci".
Direttiva 95/16/CE UNI EN 81-70 - Ed. maggio 2004 - " Regole di sicurezza per la
costruzione e l'installazione degli ascensori - Applicazioni particolari per ascensori per
passeggeri e per merci - Accessibilità agli ascensori delle persone, comprese i
disabili".
UNI EN 81-72 - Ed. maggio 2004 - " Regole di sicurezza per la costruzione e
l'installazione degli ascensori – Applicazioni particolari per ascensori per passeggeri e
merci - Ascensori antincendio".
UNI EN 81-80 - Ed. maggio 2004 - " Regole di sicurezza per la costruzione e
l'installazione degli ascensori - Ascensori esistenti - Regole per il miglioramento della
sicurezza degli ascensori per passeggeri e degli ascensori per merci esistenti".
UNI EN 13015 - Ed. maggio 2002 corretta il 19.06.2002 - " Manutenzione di ascensori
e scale mobili. Regole per le istruzioni di manutenzione".
UNI EN 12015 e UNI EN 12016 - Ed. luglio 1999 - "Compatibilità elettromagnetica.
PDF created with pdfFactory trial version www.pdffactory.com
§
§
§
§
§
Norma per famiglia di prodotti per ascensori, scale mobili e marciapiedi mobili.
Emissione e immunità".
D.P.R. 459/96 - Ed. luglio 1996 - "Regolamento per l'attuazione delle direttive
89/392/CEE, 91/368/CEE, 93/44/CEE e 93/68/CEE concernenti il riavvicinamento delle
legislazioni degli Stati Membri relative alle macchine".
LEGGE 13/89 - G.U. n. 21 del 26.01.1989 - "Disposizioni per favorire il superamento e
l'eliminazione delle barriere architettoniche negli edifici privati".
D.M. 236/89 - G.U. n. 145 del 23.06.1989 - "Prescrizioni tecniche necessarie a
garantire l'accessibilità, l'adattabilità e la visibilità degli edifici privati e di edilizia
residenziale pubblica sovvenzionata e agevolata, ai fini del superamento e
l'eliminazione delle barriere architettoniche".
D.M. 587/87 - G.U. n. 71 del 25.03.1988 - "Attuazione delle direttive n. 84/528/CEE e
n. 86/312/CEE relative agli ascensori elettrici".
D.P.R. 1467/63 - G.U. n. 298 del 16.11.1963 - "Norme per gli ascensori ed i
montacarichi in servizio privato".
Dalla Gazzetta Ufficiale del 23 giugno del 1989 sono stati definiti i seguenti
punti:
L’ascensore deve avere una cabina di dimensioni minime tali da permettere l’uso da
parte di una persona su sedia a rotelle.
Le porte di cabina e di piano devono essere di tipo automatico e di dimensioni tali da
permettere l’accesso alla sedia a ruote.
Nell’interno della cabina devono essere posti un citofono, un campanello d’allarme,
una luce di emergenza.
Il ripiano di fermata, anteriormente alla porta della cabina deve avere una profondità
tale da contenere una sedia a ruote e le manovre per l’accesso.
Deve essere prevista la segnalazione sonora dell’arrivo al piano e un dispositivo
luminoso per segnalare ogni eventuale stato di allarme.
Le porte di cabina e di piano devono essere del tipo a scorrimento automatico.
Nel caso di adeguamento la porta può essere incernierata purchè dotata di sistema
per apertura automatica.
In tutti i casi le porte devono rimanere aperte per almeno 8 secondi e il tempo di
chiusura non deve essere inferiore ai 4 sec.
L’arresto dei piani deve avvenire con autolivellamento con tolleranza max. di + 2 cm.
La bottoniera di comando interna ed esterna deve avere i bottoni ad una altezza
compresa tra 1.10 e 1.40 m e deve essere posta su una parete ad almeno 35 cm
dalla porta della cabina.
I pulsanti di comando devono prevedere la numerazione in rilievo e le scritte con
traduzione in Braille.
Si deve prevedere la segnalazione sonora dell’arrivo al piano e, ove possibile ,
l’installazione di un sedile ribaltabile con ritorno automatico.
5 - PROGRAMMAZIONE
5.1 - CENNI SUL PLC:
Il PLC è un controllore a logica programmabile (Programmable Logic Controller) è un
computer industriale specializzato in origine nella gestione dei processi industriali. Il
PDF created with pdfFactory trial version www.pdffactory.com
PLC esegue un programma ed elabora i segnali digitali ed analogici provenienti da
sensori e diretti agli attuatori presenti in un impianto industriale, nel tempo, è
entrato anche nell'uso domestico; l'installazione di un PLC nel quadro elettrico di
un'abitazione, a valle dell’interruttore magnetotermico e differenziale, permette la
gestione automatica dei molteplici sistemi e impianti installati nella casa: impianto di
riscaldamento, antifurto, irrigazione, luci, ecc...
Un PLC è composto da un alimentatore, dalla CPU che in certi casi può avere interna
o esterna una memoria RAM o Flash o EPROM, da un certo numero di schede di
ingressi digitali e uscite digitali, e nel caso in cui sia necessario gestire grandezze
analogiche, il PLC può ospitare delle schede di ingresso o di uscita sia analogiche che
digitali.
L’alimentatore:
Fornisce le tensioni a 5 V necessarie alle schede, le tensioni a + o - 12 V, le altre
tensioni necessarie, sempre in corrente continua (cc.). Può essere interno o esterno
al PLC.
La CPU
È il cervello del PLC. La CPU è una scheda complessa basata su un microprocessore
con un sistema operativo proprietario, e con una zona di memoria a disposizione del
programma utente, cioè del programma di automazione. Una delle caratteristiche
proprie delle CPU dei PLC è la loro capacità di poter gestire le modifiche del
programma di gestione del processo durante il normale funzionamento. Questa
possibilità è estremamente utile nel caso di impianti che devono essere sempre attivi.
I moduli di ingresso/uscita:
I moduli di ingresso uscita costituiscono l’interfaccia del PLC con il processo da
controllare. Questi moduli possono trattare segnali di tipo analogico o digitale. Il
motivo della presenza di moduli specializzati consiste nel fatto che i segnali generati
dai trasduttori, anche quelli ad uscita logica, non possono venire direttamente
interfacciati alla elettronica del modulo processore, a causa di differenze nel livello di
segnale o tipologia. Ciascun ingresso ed uscita dei moduli di I/O (via di
ingresso/uscita) è identificata dal sistema operativo del PLC in base alla posizione che
occupa. Questo significa che non è possibile riconfigurare dinamicamente le vie del
PLC ma queste sono fissate al momento del cablaggio. I moduli assicurano le
funzionalità di filtraggio (analogico e digitale) degli ingressi e la protezione contro
sovratensioni ed inversione di polarità degli ingressi.
La memoria del PLC :
Per poter memorizzare il programma da eseguire e i dati che ne derivano il PLC
necessita di memorie , i tipi di memorie sono:
Memoria Statica
Nei PLC di prima concezione la memoria era di tipo Statico, quindi all'utente erano
assegnate delle aree "preconfezionate" con quantitativi fissi di dati memorizzabili
all'interno, e che non potevano essere cambiati in alcun modo. La memoria era
rigidamente divisa tra dati e programmi ed anche tra tipi diversi di dati. Questo
sistema è ancora ampiamente usato per piccoli PLC con applicazioni semplici e pochi
ingressi e uscite da gestire, dove la gestione della memoria in un modo piuttosto che
in un altro non influisce nel risultato.
Memoria Dinamica
Nei PLC più moderni la memoria interna è di tipo Dinamico, e può essere considerata
PDF created with pdfFactory trial version www.pdffactory.com
come un Hard Disk di un Personal Computer, con file di dati e file di programmi. In
fase di caricamento del software applicativo il PLC alloca dinamicamente la memoria a
seconda delle risorse che sono richieste. A parte certe aree di sistema, ed alcune aree
preconfezionate al fine di facilitare la programmazione ai meno esperti, la memoria
per il resto è liberamente configurabile. Si possono decidere nuove aree dati, anche
dello stesso tipo, ma usate da sottoprogrammi diversi ed in fasi diverse. Ogni area
dati può avere un nome, denominato Nome File. Per i programmi valgono le stesse
considerazioni.
5.2 - VIRTUALPLC:
VirtualPLC è un programma che permette di simulare delle utilizzazioni varie del PLC.
Tramite questo programma di simulazione noi abbiamo realizzato il programma di
funzionamento di un ascensore.
5.2.1 - PROGETTO IN LINGUAGGIO KOP e AWL:
Linguaggio KOP:
Ladder diagram (KOP) detto Linguaggio a contatti - È il linguaggio più usato fino a
pochi anni fa, in quanto era la trasposizione informatica dei circuiti elettrici usati dagli
elettrotecnici.
L'automazione industriale, infatti, era basata su sistemi a logica cablata, il PLC ha
permesso di trasportare i concetti della logica cablata nel linguaggio Ladder. Il
programmatore semplicemente utilizza simboli logici corrispondenti a segnali di
ingresso e di uscita per implementare la logica non più cablando i relè, ma disegnando
gli schemi elettrici.
Linguaggio AWL: Instruction List (AWL) detto Lista di istruzioni - Linguaggio di
semplice molto simile all'Assembler. Può essere facilmente ricavato dal Ladder.
Linguaggio KOP:
PDF created with pdfFactory trial version www.pdffactory.com
PDF created with pdfFactory trial version www.pdffactory.com
Tabella input/output:
PDF created with pdfFactory trial version www.pdffactory.com
Simobolo
Indirizzo
Commento
SQ1
I0,0
Micro (NC) presenza cabina piano Terra
SQ2
I0,1
Micro (NC) presenza cabina 1° Piano
SQ3
I0,2
Micro (NC) presenza cabina 2° Piano
SQ4
I0,3
Micro (NC) presenza cabina 3° Piano
SQ5
I0,4
Micro (NO) Porte chiuse
SB1
I0,5
Pulsante (NO) Chiamata piando Terra
SB2
I0,6
Pulsante (NO) Chiamata 1° Piano
SB3
I0,7
Pulsante (NO) Chiamata 2° Piano
SB4
I1,0
Pulsante (NO) Chiamata 3° Piano
SB5
I1,1
Pulsante (NO) arresto cabina
SB6
I1,2
Pulsante (NO) Mandata 3° Piano
SB7
I1,3
Pulsante (NO) Mandata 2° Piano
SB8
I1,4
Pulsante (NO) Mandata 1° Piano
SB9
I1,5
Pulsante (NO) Mandata piano Terra
B1
I1,6
Contatto (NO) Fotocellula presenza persone
SQ6
I1,7
Micro (NC) apertura Porte
KM1
Q0,0
Teleruttore Salita cabina
KM2
Q0,1
Teleruttore Discesa cabina
KM3
Q0,2
Teleruttore Chiusura porte
KM4
Q0,3
Teleruttore Apertura porte
HL1
Q0,4
Lampada Piano Terra
HL2
Q0,5
Lampada 1° Piano
HL3
Q0,6
Lampada 2° Piano
HL4
Q0,7
Lampada 3° Piano
HL5
Q1,0
Lampada Cabina 3° Piano
HL6
Q1,1
Lampada Cabina 2° Piano
HL7
Q1,2
Lampada Cabina 1° Piano
HL8
Q1,3
Lampada Cabina piano Terra
5.3 - MOELLER:
PDF created with pdfFactory trial version www.pdffactory.com
Poiché Virtual PLC è un programma esclusivamente virtuale e non è possibile eseguire
il download del progetto su nessun PLC abbiamo dovuto utilizzare un software
alternativo.
Il software da noi utilizzato è easy soft 5 della MOELLER che ha la possibilità di
interfacciarsi con il PLC in dotazione alla scuola.
PDF created with pdfFactory trial version www.pdffactory.com
PDF created with pdfFactory trial version www.pdffactory.com
Tabella input/output
Simbolo
Indirizzo
Commento
Pulsante P:T
I0,1
Pulsante (NO) chiamata piano terra
Pulsante P 1°
I0,2
Pulsante (NO) chiamata 1° piano
Pulsante P 2°
I0,3
Pulsante (NO) chiamata 2° piano
Stop
I0,4
Interruttore arresto motore
F:C. P.T.
I0,7
Micro (NO) presenza piano terra
F.C. P.1°
I0,8
Fotocellula (NO) presenza 1° P
F.C. P.2°
I0,9
Micro (NO) presenza 2° piano
Comm. discesa
Q0,1
Commutazione motore per la discesa
Comm. salita
Q0,2
Commutazione motore per la salita
Led P.T
Q0,3
Segnalazione di presenza piano terra
Led P.1°
Q0,4
Segnalazione di presenza 1° P
Led P.2°
Q0,5
Segnalazione di presenza 2° P
5.3.1 - Descrizione del programma in linguaggio ladder:
Nelle prime sei stringhe di comando ci sono le informazioni il che serviranno per
mettere in funzione il motore, nelle prime tre stringhe con la funzione di discesa, in
quelle successive per la salita. In queste stringhe come primo componente viene
inserito il dispositivo (finecorsa, fotocellula) che ci permette di capire in che piano si
trova la cabina in un preciso istante, successivamente viene posizionato il pulsante
per la scelta del piano a cui si vuole andare e per far si che la cabina si fermi viene
messo il finecorsa (in questo caso normalmente chiuso) in modo che nel momento in
cui viene attivato apre il circuito di attivazione del motore.
Nelle stringhe sette e otto si può vedere nel dettaglio quali merker attivano la
commutazione di salita e quella di discesa. In entrambe viene inserito un interruttore
(con comando manuale) che ha la funzione di tagliare l'alimentazione al motore in
caso di problemi (ad esempio se il motore non dovesse più rispondere ai comandi e
quindi proseguire il movimento nonostante sia alla fine della guida predisposta al
movimento) senza la necessità di scollegare il PLC.
Nell'ultima parte di programma è presente la segnalazione di presenza al piano in cui
si trova la nostra cabina, quindi ci sarà il finecorsa di ogni piano che dara il seganle al
rispettivo led .
6 - REALIZZAZIONE PRATICA
PDF created with pdfFactory trial version www.pdffactory.com
6.1 - PROGETTAZIONE
Questo progetto è stato sviluppato partendo da una esercitazione svolta nel
laboratorio di sistemi tramite l'utilizzo del programma Virtual PLC che permette di
simulare il funzionamento di un ascensore.
Successivamente si è deciso di realizzare un prototipo di un ascensore.
I problemi nella progettazione sono stati riscontrati sin dall'inizio, nella scelta delle
dimensioni che avrà l'ascensore una volta unltimato, successivamente la scelta del
motore ( m.c.c.; alzacristalli elettrico per automobili; motore di un'antenna per
automobili).
Questi sono due dei problemi che sono stati risolti, mentre uno che non è stato
superato è la realizzazione delle porte e della loro apertura.
6.2 - Materiali:
Alzacristalli per automobile (m.c.c. con sistema di carrucole per il movimento)
Scatola PLC (alimentatore, PLC, gruppo relè, 3 pulsanti, 3 deviatori)
Plexiglas
Base in legno
n° 4 Angolari in alluminio
n° 3 Led
n° 3 Resistenze 2,2 kohm
n° 1 Cabina (in PVC)
n° 1 Fotocellula
n° 2 Microinterruttori (finecorsa)
n° 3 Pulsanti (prelevati da un lettore DVD)
n°2 Morsettiere
Capicorda
6.3 - Costruzione:
Sulla base in legno è stata realizzata una struttura in plexiglas nella quale è stato
inserito il nostro ascensore.
Sul pannello frontale sono stati posizionati: tre pulsanti per effettuare la chiamata al
piano desiderato della cabina; tre led per indicare la presenza al piano.
Per l'arresto della cabina sono stati posizionati due finecorsa per i piani estremi (piano
terra; 2° piano) mentre per il piano centrale e stata posizionata una fotocellula.
Il movimento è realizzato da un alzacristalli sul quale è fissata la cabina.
7 – APPARECCHI DI MANOVRA E PROTEZIONE
PDF created with pdfFactory trial version www.pdffactory.com
Un apparecchio di mavrova è un dispositivo in grado di eseguire manovre di apertura
e di chiusura di un circuito.
Le manovre posso avvenire a carico, ossia in presenza di corrente nel circuito, oppure
a vuoto, in assenza di corrente in quanto il circuito è interrotto in un altro punto.
L'apertura a carico interrompe la corrente, mentre la chiusura a carico stabilisce la
corrente nel circuito. Le manovre possono anche avvenire in condizioni di normale
esercizio oppure in condizioni di funzionamento anormale, a causa di guasti
sull'impianto. In relazione al tipo di comando si distingue il comando manuale,
effettuato dall'operatore, dal comando automatico, determinato dall'intervento di un
dispositivo di protezione o da un sistema di controllo.
Accoppiando apparecchi di manovra e dispositivi di protezione dalle sovracorrenti
(fusibili, sganciatori di massima corrente) si ottengono apparecchiature di manovra e
protezione contro sovraccarichi e corto circuiti.
Nel prototipo realizzato è stato inserito un interruttore in serie all'alimentazione, e
un'altro interruttore (che in realtà sarebbe un deviatore a tre posizioni collegato per
funzionare in modalità on-off) che tramite la programmazione del PLC va ad
intervenire sull'alimentazione del motore, mantenendo così in funzione tutte le altre
apparecchiature.
PDF created with pdfFactory trial version www.pdffactory.com
I.T.I.S “P. HENSEMBERGER”
Monza
Indirizzo Elettrotecnica e Automazione
A.S. 2007/2008
PROGETTAZIONE E
REALIZZAZIONE
DI UN ASCENSORE DIDATTICO
CONTROLLATO DA PLC
Alunno : Cester Fabio
Classe: 5B1
Supervisore lavoro Prof. Fransosa Pasquale
Docente responsabile Prof. Rizzaro Giuseppe
1
PDF created with pdfFactory trial version www.pdffactory.com
Indice
1 - Presentazione del progetto.................................pag 3
2 - Introduzione sull'ascensore................................pag 4
2.1 - Cenni storici...........................................pag 4
2.2 - Cenni teorici...........................................pag 5
3 - Cenni sul motore in corrente continua..................pag 6
3.1 - Motore a spazzole...................................pag 6
3.2 - Motore brushless....................................pag 7
4 – Normative......................................................pag 8
5 – Programmazione.............................................pag 10
5.1 - Cenni sul PLC........................................pag 10
5.2 - Virtual PLC............................................pag 11
5.2.1 - Progetto in linguaggio KOP e AWL...pag 11
5.3 – Moeller.................................................pag 16
5.3.1 – Descrizione del programma in linguaggio
ladder.........................................pag 18
6 - Realizzazione pratica........................................pag 19
6.1 – Progettazione........................................pag 19
6.2 – Materiali...............................................pag 19
6,3 – Assemblaggio........................................pag 19
7 - Apparecchi di manovra e protezione...................pag 20
PDF created with pdfFactory trial version www.pdffactory.com
1 – PRESENTAZIONE DEL PROGETTO
Il progetto che verrà sviluppato in questa relazione consiste nella progettazione,
simulazione e realizzazione di un ascensore in scala comandato da PLC.
Nella fase di progettazione è stato realizzato il programma per il PLC che andrà a
comandare tutti i dispositivi (motore, led), ed è stato dimensionato il possibile aspetto
che avrebbe dovuto avere l'ascensore una volta ultimato (anche se subirà molte
variazioni).
Nella fase di simulazione è stato caricato il programma realizzato in precedenza in un
simulatore virtuale ( Virtual PLC ) ed è stato verificato il corretto funzionamento.
Nella fase di realizzazione infine si è costruito un modellino in scala di ascensore
attraverso l'utilizzo di un alzacristalli elettrico per automobili.
2 – INTRODUZIONE SULL'ASCENSORE
2.1 – Cenni storici
Sicuramente una delle prime situazioni in cui si è sentita la necessità di
un’attrezzatura idonea a trasportare in verticale uomini e materiali è quella delle
miniere. Sono dell'inizio del XIX secolo i primi studi per dotare quei primitivi
apparecchi di un motore a vapore che sostituisse l'energia umana.
Il primo sviluppo fondamentale che si ebbe in direzione dell'ascensore come oggi è
conosciuto venne dato da un inventore americano, Elisha Otis, che nel 1853 depositò
il brevetto di un sistema di sicurezza paracadute, destinato ad impedire la caduta
violenta della cabina in caso di guasti o rotture ai cavi. La prima applicazione pratica si
ebbe nel 1857 a New York e, negli anni successivi, altri famosi ingegneri lo
perfezionarono con l'adozione di circuiti idraulici e con l'invenzione dell'ascensore
elettrico, fatta risalire al 1880 in Germania da parte di Werner von Siemens.
Una delle prime spettacolari applicazioni della nuova invenzione è quella vista nel
1889 in Francia in occasione della presentazione della Tour Eiffel a Parigi.
Le tappe più importanti nell'evoluzione dell'ascensore possono essere considerate
quelle dell'abolizione del manovratore, datata 1924, e successivamente l'introduzione
delle porte ad apertura automatica al posto di quelle manuali. Notevoli progressi si
sono registrati anche nel campo dei "quadri di manovra", deputati al controllo e alla
gestione dell'impianto. Superati gli obsoleti pannelli elettromeccanici senza particolari
flessibilità di funzionamento, i moderni sistemi elettronici con microprocessori
consentono un esercizio adattabile ad ogni genere di edificio ed utilizzo (prenotazioni
di chiamata, corse con arresti intermedi per "raccogliere" e "riempire" la cabina fino al
raggiungimento del massimo carico, ecc.).
Fra le ultime evoluzioni citiamo:
- la regolazione elettronica della velocità: oltre a rendere estremamente dolci
le fasi di avvio e fermata della cabina, permettono l'arresto della stessa
esattamente in corrispondenza del piano; questa è inoltre una condizione
necessaria al soddisfacimento delle ultime norme in materia di sicurezza (fra
le maggiori cause di incidente si registrano proprio gli inciampi sugli scalini
che si creano fra piano e cabina), e precisamente il raggiungimento di
adeguata precisione di fermata e di livellazione al piano, come richiesto dalla
norma per l'accessibilità degli ascensori anche ai disabili EN 81-70;
- l'eliminazione del "vano o locale macchina" mediante lo spostamento di
PDF created with pdfFactory trial version www.pdffactory.com
-
motore, argano e apparecchiature di comando - realizzati in forma molto
compatta - all'interno del vano di corsa allo scopo di risparmiare spazio
all'interno dell'edificio;
la riduzione degli spazi verticali di sicurezza nel vano ascensore, in alto e/o
in basso, in modo da ridurre gli ingombri verticali dell'ascensore nell'edificio,
specie se preesistente.
2 – 2 Cenni teorici
Per ascensore si intende un apparecchio elevatore con installazione fissa che serve
piani definiti mediante una cabina che si sposta lungo guide rigide e la cui inclinazione
sull'orizzontale è superiore a 15 gradi, destinato al trasporto di persone.
Gli ascensori o elevatori (definizione dell'ultima direttiva comunitaria 95/16/CE del 29
giugno 1995 recepita in Italia con il D.P.R. n. 162 del 30 aprile 1999 ) possono essere:
-
Elettrici (a fune);
Oleodinamici (comunemente noti come idraulici poiché nei primi il fluido
usato era l'acqua).
L'ascensore elettrico moderno è composto principalmente dai seguenti elementi:
1. Macchinario di sollevamento (detto anche argano)
2. Cabina passeggeri
3. Contrappeso (che ha funzioni anche di bilanciamento con conseguente riduzione
della potenza elettrica impegnata e dei consumi energetici)
4. Funi di trazione
5. Quadro elettrico di manovra
6. Dispositivi di sicurezza comprendenti: Limitatore di velocità, Paracadute.
L'ascensore oleodinamico moderno è composto principalmente dai seguenti elementi:
1.
2.
3.
4.
5.
Centralina idraulica
Cilindro e pistone
Cabina passeggeri
Quadro elettrico di manovra
Dispositivi di sicurezza comprendenti: Paracadute, Valvola di blocco
6. Può inoltre comprendere anche delle funi d trazione.
I due azionamenti si differenziano nel modo con cui viene imposto il movimento. Con
un ascensore elettrico è il macchinario di sollevamento che trasmette il movimento
alle funi che reggono la cabina per mezzo dell'attrito sulla puleggia di frizione; il
motore elettrico funziona in entrambe le direzioni di marcia: salita e discesa.
Con un ascensore oleodinamico è la centralina idraulica che fornisce l'energia ad un
fluido per mezzo di una pompa di tipo volumetrico e di una serie di valvole
(generalmente un olio con speciali additivi) che muove a sua volta il pistone
permettendogli di fuoriuscire dal cilindro; in questo caso il motore elettrico funziona
quando la cabina va in salita poiché in discesa è la forza di gravità a muoverla.
Un ascensore che trasporta solamente materiali, senza che vi sia la possibilità di
accompagnamento umano, è definito montacarichi , e non è soggetto alla Direttiva
Ascensori, bensì alla Direttiva Macchine.
Un particolare e curioso tipo di ascensore a funzionamento continuo è il paternoster.
L'Italia è il paese con il maggior numero di ascensori al mondo - nel 2006 tra i
750.000 e gli 800.000 impianti - e se ne installano ogni anno da 15.000 a 20.000
nuovi.
PDF created with pdfFactory trial version www.pdffactory.com
In Italia gli impianti esistenti devono essere verificati ogni 2 anni (ovvero ogni qual
volta ci sia una rimessa in servizio a seguito di modifiche rilevanti, trasformazioni,
incidenti ecc.) da un ingegnere abilitato ed iscritto all'Albo facente capo ad un Ente
notificato che ha ottenuto l'autorizzazione ministeriale.
3 - CENNI SUL MOTORE IN CORRENTE CONTINUA
Illustrazione 1: Un semplice motore DC.
Quando la corrente scorre negli avvolgimenti, si genera un campo magnetico
intorno al rotore. La parte sinistra del rotore è respinta dal magnete di sinistra ed
attirata da quello di destra. Analogalmente fa la parte ina basso a destra. La
coppia genera la rotazione.
3.1 - Motore a spazzole
Il classico motore in corrente continua ha una parte che gira detta appunto rotore o
anche armatura e una parte che genera un campo magnetico fisso (nell'esempio i due
magneti colorati) detta statore. Un interruttore rotante detto commutatore o collettore
a spazzole inverte due volte ad ogni giro la direzione della corrente elettrica che
percorre i due avvolgimenti generando un campo magnetico che entra ed esce dalle
parti arrotondate dell'armatura. Nascono forze di attrazione e repulsione con i magneti
permanenti fissi (indicati con N ed S nelle figure).
La velocità di rotazione dipende da:
• Tensione applicata.
• Corrente assorbita dal rotore.
• Carico applicato.
La coppia generata è proporzionale alla corrente. Il controllo più semplice agisce sulla
tensione di alimentazione. Nei sistemi più complessi si usa un Controllo automatico in
retroazione che legge le variabili per generare la tensione da applicare al motore. Il
motore CC a magneti permanenti ha un comportamento reversibile: diventa un
generatore di corrente continua se si collega un altro motore all'albero. Si può allora
prelevare l'energia elettrica prodotta collegandosi alle spazzole.
Il suo limite principale è nella necessità del commutatore a spazzole:
• Le spazzole sono in grafite, mentre nei piccoli servomotori e nei tipi utilizzati
nei lettori CD/DVD o registratori a cassette sono in lega metallica bianca.
La differenza è nella frequenza della loro sostituzione, infatti nelle macchine
PDF created with pdfFactory trial version www.pdffactory.com
utensili come smerigliatrici o trapani, si utilizzano spazzole in grafite, perché è
molto semplice e veloce sostituirle, le spazzole in metallo, sono usate su
apparecchi dove risulta scomodo o non conveniente cambiarle, come nei motori
d'avviamento dei mezzi di trasporto.
• Le spazzole pongono un limite alla massima velocità di rotazione: maggiore è la
velocità e più forte è la pressione che bisogna esercitare su di esse per
mantenere un buon contatto, comunque i motori usati negli aspirapolvere e
negli elettroutensili portatili (trapani, mole, ect.) possono raggiungere i 3500045000 giri al minuto.
• Tra spazzole e collettore, nei momenti di commutazione, si hanno transitori di
apertura degli avvolgimenti induttivi e quindi scintillio (attenuabile con
opportuni sistemi ma non eliminabile).
• Queste scintille comportano disturbi elettrici sia irradiati nell'ambiente
circostante che trasmessi al generatore di tensione (che alimenta il motore);
questi disturbi, in determinati settori di impiego, possono causare problemi di
compatibilità elettromagnetica.
La presenza di avvolgimenti elettrici sul rotore ha anche due aspetti negativi:
• Se il motore è di grossa potenza si hanno dei problemi di smaltimento del
calore (gli avvolgimenti si riscaldano per effetto Joule e il campo magnetico
alternato nel nucleo del rotore genera altre perdite, causate da isteresi
magnetica e correnti parassite nel nucleo stesso, e quindi altro calore.
• Gli avvolgimenti appesantiscono il rotore (aumenta il momento d'inerzia): se il
motore deve rispondere con rapidità e precisione (come avviene nelle
automazioni industriali e nella robotica) il controllo diventa più complesso; per
piccole potenze (da 1 a 200W) e servocontrolli a volte si usano particolari tipi di
motori con rotore con avvolgimenti a forma di bicchiere e privo del nucleo di
ferro, detti "ironless": hanno bassa inerzia e rendimento elettrico più elevato dei
loro corrispondenti con rotore avvolto su nucleo di ferro.
3.2 - Motore brushless
I problemi illustrati si potrebbero evitare scambiando il rotore con lo statore (cioè se
gli avvolgimenti venissero messi sulla parte fissa e i magneti fossero montati sul
rotore). Scomparirebbe il collettore a spazzole, e gli avvolgimenti elettrici potrebbero
smaltire più facilmente il calore generato. È quello che si fa nei motori brushless (in
inglese letteralmente: senza spazzole). Essi permettono inoltre di ridurre
ulteriormente le dimensioni del rotore (e quindi le sue inerzie) usando materiali
magnetici più efficienti come le leghe di samario-cobalto. In questi motori il circuito
di alimentazione deve essere più sofisticato, dato che le funzioni del collettore
meccanico sono svolte tramite un controllo elettronico di potenza.
Motore CC con statore a filo avvolto
Nei motori CC lo statore può essere realizzato non con magneti permanenti ma,
similmente al rotore, con avvolgimenti su materiale ad alta permeabilità in cui viene
fatta scorrere della corrente: questo circuito è detto di eccitazione. In questo modo si
possono avere potenze maggiori (ma si dovrà spendere più energia anche per
alimentare questo nuovo circuito). Si possono avere vari casi nell'alimentazione del
circuito di statore:
• motore ad eccitazione indipendente: l'avvolgimento di statore è alimentato in
maniera indipendente da quello di rotore. Si ha allora più flessibilità nel
controllo dei parametri (coppia e velocità) del motore.
• motore ad eccitazione in parallelo: statore e rotore sono collegati in parallelo
(coppia maggiore, minore velocità)
PDF created with pdfFactory trial version www.pdffactory.com
• motore ad eccitazione in serie: statore e rotore sono collegati in serie (coppia
inferiore e asintotica allo zero con l'aumentare del regime, maggiore velocità,
definito anche come motore in fuga).
Si possono avere anche situazioni intermedie utilizzate in passato soprattutto nella
trazione elettrica (dove è richiesta molta coppia allo spunto e maggiore velocità a
regime).
Il motore con statore a filo avvolto può essere alimentato sia in corrente continua
che in alternata, e per questo motivo è chiamato anche motore universale; di fatto,
nella maggior parte delle applicazioni, questo tipo di motore è alimentato in corrente
alternata. La disponibilità a costi contenuti di dispositivi elettronici (come circuiti
integrati, ponti raddrizzatori, dispositivi di potenza a semiconduttore, ecc.), alcune
applicazioni che in passato sarebbero state realizzate con motori universali ora
vengono sviluppate con motori CC con magneti permanenti, permettendo ad esempio
un controllo della velocità più preciso e rendimento elettrico maggiore (nei piccoli
motori la potenza spesa per l'eccitazione è spesso rilevante, mentre diviene
percentualmente esigua nei grandi motori).
4 - NORMATIVE:
§
§
§
§
§
§
§
§
§
§
§
§
- G.U. n. L. 213 del 07.09.1995 - "Direttiva del Parlamento Europeo e del Consiglio,
del 29.06.1995, per il riavvicinamento delle legislazioni degli Stati Membri relative agli
ascensori".
D.P.R. 162/99 - G.U. n. 134 del 10.06.1999 - "Regolamento recante norme per
l'attuazione della Direttiva 95/16/CE sugli ascensori e di semplificazione dei
procedimenti per la concessione del nulla osta per ascensori e montacarichi nonché
della relativa licenza di esercizio".
D.P.R. 369/00 - G.U. n. 291 del 14.12.2000 - "Regolamento recante modifica al D.P.R.
n. 162/99 in materia di collaudo ascensori"
EN 81-1 - Ed. novembre 2005 - "Regole di sicurezza per la costruzione e l'installazione
degli ascensori. Parte 1: Ascensori elettrici".
EN 81-2 - Ed. novembre 2005 - "Regole di sicurezza per la costruzione e l'installazione
degli ascensori. Parte 2: Ascensori idraulici".
UNI 10411 - 1 - Ed. dicembre 2003 rev. all'ed. 09/1998 - "Modifiche ad ascensori
elettrici preesistenti".
UNI EN 81-28 - Ed. maggio 2004 - "Regole di sicurezza per la costruzione e
l'installazione degli ascensori - Ascensori per il trasporto di persone e merci Teleallarmi per ascensori e ascensori per merci".
Direttiva 95/16/CE UNI EN 81-70 - Ed. maggio 2004 - " Regole di sicurezza per la
costruzione e l'installazione degli ascensori - Applicazioni particolari per ascensori per
passeggeri e per merci - Accessibilità agli ascensori delle persone, comprese i
disabili".
UNI EN 81-72 - Ed. maggio 2004 - " Regole di sicurezza per la costruzione e
l'installazione degli ascensori – Applicazioni particolari per ascensori per passeggeri e
merci - Ascensori antincendio".
UNI EN 81-80 - Ed. maggio 2004 - " Regole di sicurezza per la costruzione e
l'installazione degli ascensori - Ascensori esistenti - Regole per il miglioramento della
sicurezza degli ascensori per passeggeri e degli ascensori per merci esistenti".
UNI EN 13015 - Ed. maggio 2002 corretta il 19.06.2002 - " Manutenzione di ascensori
e scale mobili. Regole per le istruzioni di manutenzione".
UNI EN 12015 e UNI EN 12016 - Ed. luglio 1999 - "Compatibilità elettromagnetica.
PDF created with pdfFactory trial version www.pdffactory.com
§
§
§
§
§
Norma per famiglia di prodotti per ascensori, scale mobili e marciapiedi mobili.
Emissione e immunità".
D.P.R. 459/96 - Ed. luglio 1996 - "Regolamento per l'attuazione delle direttive
89/392/CEE, 91/368/CEE, 93/44/CEE e 93/68/CEE concernenti il riavvicinamento delle
legislazioni degli Stati Membri relative alle macchine".
LEGGE 13/89 - G.U. n. 21 del 26.01.1989 - "Disposizioni per favorire il superamento e
l'eliminazione delle barriere architettoniche negli edifici privati".
D.M. 236/89 - G.U. n. 145 del 23.06.1989 - "Prescrizioni tecniche necessarie a
garantire l'accessibilità, l'adattabilità e la visibilità degli edifici privati e di edilizia
residenziale pubblica sovvenzionata e agevolata, ai fini del superamento e
l'eliminazione delle barriere architettoniche".
D.M. 587/87 - G.U. n. 71 del 25.03.1988 - "Attuazione delle direttive n. 84/528/CEE e
n. 86/312/CEE relative agli ascensori elettrici".
D.P.R. 1467/63 - G.U. n. 298 del 16.11.1963 - "Norme per gli ascensori ed i
montacarichi in servizio privato".
Dalla Gazzetta Ufficiale del 23 giugno del 1989 sono stati definiti i seguenti
punti:
L’ascensore deve avere una cabina di dimensioni minime tali da permettere l’uso da
parte di una persona su sedia a rotelle.
Le porte di cabina e di piano devono essere di tipo automatico e di dimensioni tali da
permettere l’accesso alla sedia a ruote.
Nell’interno della cabina devono essere posti un citofono, un campanello d’allarme,
una luce di emergenza.
Il ripiano di fermata, anteriormente alla porta della cabina deve avere una profondità
tale da contenere una sedia a ruote e le manovre per l’accesso.
Deve essere prevista la segnalazione sonora dell’arrivo al piano e un dispositivo
luminoso per segnalare ogni eventuale stato di allarme.
Le porte di cabina e di piano devono essere del tipo a scorrimento automatico.
Nel caso di adeguamento la porta può essere incernierata purchè dotata di sistema
per apertura automatica.
In tutti i casi le porte devono rimanere aperte per almeno 8 secondi e il tempo di
chiusura non deve essere inferiore ai 4 sec.
L’arresto dei piani deve avvenire con autolivellamento con tolleranza max. di + 2 cm.
La bottoniera di comando interna ed esterna deve avere i bottoni ad una altezza
compresa tra 1.10 e 1.40 m e deve essere posta su una parete ad almeno 35 cm
dalla porta della cabina.
I pulsanti di comando devono prevedere la numerazione in rilievo e le scritte con
traduzione in Braille.
Si deve prevedere la segnalazione sonora dell’arrivo al piano e, ove possibile ,
l’installazione di un sedile ribaltabile con ritorno automatico.
5 - PROGRAMMAZIONE
5.1 - CENNI SUL PLC:
Il PLC è un controllore a logica programmabile (Programmable Logic Controller) è un
computer industriale specializzato in origine nella gestione dei processi industriali. Il
PDF created with pdfFactory trial version www.pdffactory.com
PLC esegue un programma ed elabora i segnali digitali ed analogici provenienti da
sensori e diretti agli attuatori presenti in un impianto industriale, nel tempo, è
entrato anche nell'uso domestico; l'installazione di un PLC nel quadro elettrico di
un'abitazione, a valle dell’interruttore magnetotermico e differenziale, permette la
gestione automatica dei molteplici sistemi e impianti installati nella casa: impianto di
riscaldamento, antifurto, irrigazione, luci, ecc...
Un PLC è composto da un alimentatore, dalla CPU che in certi casi può avere interna
o esterna una memoria RAM o Flash o EPROM, da un certo numero di schede di
ingressi digitali e uscite digitali, e nel caso in cui sia necessario gestire grandezze
analogiche, il PLC può ospitare delle schede di ingresso o di uscita sia analogiche che
digitali.
L’alimentatore:
Fornisce le tensioni a 5 V necessarie alle schede, le tensioni a + o - 12 V, le altre
tensioni necessarie, sempre in corrente continua (cc.). Può essere interno o esterno
al PLC.
La CPU
È il cervello del PLC. La CPU è una scheda complessa basata su un microprocessore
con un sistema operativo proprietario, e con una zona di memoria a disposizione del
programma utente, cioè del programma di automazione. Una delle caratteristiche
proprie delle CPU dei PLC è la loro capacità di poter gestire le modifiche del
programma di gestione del processo durante il normale funzionamento. Questa
possibilità è estremamente utile nel caso di impianti che devono essere sempre attivi.
I moduli di ingresso/uscita:
I moduli di ingresso uscita costituiscono l’interfaccia del PLC con il processo da
controllare. Questi moduli possono trattare segnali di tipo analogico o digitale. Il
motivo della presenza di moduli specializzati consiste nel fatto che i segnali generati
dai trasduttori, anche quelli ad uscita logica, non possono venire direttamente
interfacciati alla elettronica del modulo processore, a causa di differenze nel livello di
segnale o tipologia. Ciascun ingresso ed uscita dei moduli di I/O (via di
ingresso/uscita) è identificata dal sistema operativo del PLC in base alla posizione che
occupa. Questo significa che non è possibile riconfigurare dinamicamente le vie del
PLC ma queste sono fissate al momento del cablaggio. I moduli assicurano le
funzionalità di filtraggio (analogico e digitale) degli ingressi e la protezione contro
sovratensioni ed inversione di polarità degli ingressi.
La memoria del PLC :
Per poter memorizzare il programma da eseguire e i dati che ne derivano il PLC
necessita di memorie , i tipi di memorie sono:
Memoria Statica
Nei PLC di prima concezione la memoria era di tipo Statico, quindi all'utente erano
assegnate delle aree "preconfezionate" con quantitativi fissi di dati memorizzabili
all'interno, e che non potevano essere cambiati in alcun modo. La memoria era
rigidamente divisa tra dati e programmi ed anche tra tipi diversi di dati. Questo
sistema è ancora ampiamente usato per piccoli PLC con applicazioni semplici e pochi
ingressi e uscite da gestire, dove la gestione della memoria in un modo piuttosto che
in un altro non influisce nel risultato.
Memoria Dinamica
Nei PLC più moderni la memoria interna è di tipo Dinamico, e può essere considerata
PDF created with pdfFactory trial version www.pdffactory.com
come un Hard Disk di un Personal Computer, con file di dati e file di programmi. In
fase di caricamento del software applicativo il PLC alloca dinamicamente la memoria a
seconda delle risorse che sono richieste. A parte certe aree di sistema, ed alcune aree
preconfezionate al fine di facilitare la programmazione ai meno esperti, la memoria
per il resto è liberamente configurabile. Si possono decidere nuove aree dati, anche
dello stesso tipo, ma usate da sottoprogrammi diversi ed in fasi diverse. Ogni area
dati può avere un nome, denominato Nome File. Per i programmi valgono le stesse
considerazioni.
5.2 - VIRTUALPLC:
VirtualPLC è un programma che permette di simulare delle utilizzazioni varie del PLC.
Tramite questo programma di simulazione noi abbiamo realizzato il programma di
funzionamento di un ascensore.
5.2.1 - PROGETTO IN LINGUAGGIO KOP e AWL:
Linguaggio KOP:
Ladder diagram (KOP) detto Linguaggio a contatti - È il linguaggio più usato fino a
pochi anni fa, in quanto era la trasposizione informatica dei circuiti elettrici usati dagli
elettrotecnici.
L'automazione industriale, infatti, era basata su sistemi a logica cablata, il PLC ha
permesso di trasportare i concetti della logica cablata nel linguaggio Ladder. Il
programmatore semplicemente utilizza simboli logici corrispondenti a segnali di
ingresso e di uscita per implementare la logica non più cablando i relè, ma disegnando
gli schemi elettrici.
Linguaggio AWL: Instruction List (AWL) detto Lista di istruzioni - Linguaggio di
semplice molto simile all'Assembler. Può essere facilmente ricavato dal Ladder.
Linguaggio KOP:
PDF created with pdfFactory trial version www.pdffactory.com
PDF created with pdfFactory trial version www.pdffactory.com
Tabella input/output:
PDF created with pdfFactory trial version www.pdffactory.com
Simobolo
Indirizzo
Commento
SQ1
I0,0
Micro (NC) presenza cabina piano Terra
SQ2
I0,1
Micro (NC) presenza cabina 1° Piano
SQ3
I0,2
Micro (NC) presenza cabina 2° Piano
SQ4
I0,3
Micro (NC) presenza cabina 3° Piano
SQ5
I0,4
Micro (NO) Porte chiuse
SB1
I0,5
Pulsante (NO) Chiamata piando Terra
SB2
I0,6
Pulsante (NO) Chiamata 1° Piano
SB3
I0,7
Pulsante (NO) Chiamata 2° Piano
SB4
I1,0
Pulsante (NO) Chiamata 3° Piano
SB5
I1,1
Pulsante (NO) arresto cabina
SB6
I1,2
Pulsante (NO) Mandata 3° Piano
SB7
I1,3
Pulsante (NO) Mandata 2° Piano
SB8
I1,4
Pulsante (NO) Mandata 1° Piano
SB9
I1,5
Pulsante (NO) Mandata piano Terra
B1
I1,6
Contatto (NO) Fotocellula presenza persone
SQ6
I1,7
Micro (NC) apertura Porte
KM1
Q0,0
Teleruttore Salita cabina
KM2
Q0,1
Teleruttore Discesa cabina
KM3
Q0,2
Teleruttore Chiusura porte
KM4
Q0,3
Teleruttore Apertura porte
HL1
Q0,4
Lampada Piano Terra
HL2
Q0,5
Lampada 1° Piano
HL3
Q0,6
Lampada 2° Piano
HL4
Q0,7
Lampada 3° Piano
HL5
Q1,0
Lampada Cabina 3° Piano
HL6
Q1,1
Lampada Cabina 2° Piano
HL7
Q1,2
Lampada Cabina 1° Piano
HL8
Q1,3
Lampada Cabina piano Terra
5.3 - MOELLER:
PDF created with pdfFactory trial version www.pdffactory.com
Poiché Virtual PLC è un programma esclusivamente virtuale e non è possibile eseguire
il download del progetto su nessun PLC abbiamo dovuto utilizzare un software
alternativo.
Il software da noi utilizzato è easy soft 5 della MOELLER che ha la possibilità di
interfacciarsi con il PLC in dotazione alla scuola.
PDF created with pdfFactory trial version www.pdffactory.com
PDF created with pdfFactory trial version www.pdffactory.com
Tabella input/output
Simbolo
Indirizzo
Commento
Pulsante P:T
I0,1
Pulsante (NO) chiamata piano terra
Pulsante P 1°
I0,2
Pulsante (NO) chiamata 1° piano
Pulsante P 2°
I0,3
Pulsante (NO) chiamata 2° piano
Stop
I0,4
Interruttore arresto motore
F:C. P.T.
I0,7
Micro (NO) presenza piano terra
F.C. P.1°
I0,8
Fotocellula (NO) presenza 1° P
F.C. P.2°
I0,9
Micro (NO) presenza 2° piano
Comm. discesa
Q0,1
Commutazione motore per la discesa
Comm. salita
Q0,2
Commutazione motore per la salita
Led P.T
Q0,3
Segnalazione di presenza piano terra
Led P.1°
Q0,4
Segnalazione di presenza 1° P
Led P.2°
Q0,5
Segnalazione di presenza 2° P
5.3.1 - Descrizione del programma in linguaggio ladder:
Nelle prime sei stringhe di comando ci sono le informazioni il che serviranno per
mettere in funzione il motore, nelle prime tre stringhe con la funzione di discesa, in
quelle successive per la salita. In queste stringhe come primo componente viene
inserito il dispositivo (finecorsa, fotocellula) che ci permette di capire in che piano si
trova la cabina in un preciso istante, successivamente viene posizionato il pulsante
per la scelta del piano a cui si vuole andare e per far si che la cabina si fermi viene
messo il finecorsa (in questo caso normalmente chiuso) in modo che nel momento in
cui viene attivato apre il circuito di attivazione del motore.
Nelle stringhe sette e otto si può vedere nel dettaglio quali merker attivano la
commutazione di salita e quella di discesa. In entrambe viene inserito un interruttore
(con comando manuale) che ha la funzione di tagliare l'alimentazione al motore in
caso di problemi (ad esempio se il motore non dovesse più rispondere ai comandi e
quindi proseguire il movimento nonostante sia alla fine della guida predisposta al
movimento) senza la necessità di scollegare il PLC.
Nell'ultima parte di programma è presente la segnalazione di presenza al piano in cui
si trova la nostra cabina, quindi ci sarà il finecorsa di ogni piano che dara il seganle al
rispettivo led .
6 - REALIZZAZIONE PRATICA
PDF created with pdfFactory trial version www.pdffactory.com
6.1 - PROGETTAZIONE
Questo progetto è stato sviluppato partendo da una esercitazione svolta nel
laboratorio di sistemi tramite l'utilizzo del programma Virtual PLC che permette di
simulare il funzionamento di un ascensore.
Successivamente si è deciso di realizzare un prototipo di un ascensore.
I problemi nella progettazione sono stati riscontrati sin dall'inizio, nella scelta delle
dimensioni che avrà l'ascensore una volta unltimato, successivamente la scelta del
motore ( m.c.c.; alzacristalli elettrico per automobili; motore di un'antenna per
automobili).
Questi sono due dei problemi che sono stati risolti, mentre uno che non è stato
superato è la realizzazione delle porte e della loro apertura.
6.2 - Materiali:
Alzacristalli per automobile (m.c.c. con sistema di carrucole per il movimento)
Scatola PLC (alimentatore, PLC, gruppo relè, 3 pulsanti, 3 deviatori)
Plexiglas
Base in legno
n° 4 Angolari in alluminio
n° 3 Led
n° 3 Resistenze 2,2 kohm
n° 1 Cabina (in PVC)
n° 1 Fotocellula
n° 2 Microinterruttori (finecorsa)
n° 3 Pulsanti (prelevati da un lettore DVD)
n°2 Morsettiere
Capicorda
6.3 - Costruzione:
Sulla base in legno è stata realizzata una struttura in plexiglas nella quale è stato
inserito il nostro ascensore.
Sul pannello frontale sono stati posizionati: tre pulsanti per effettuare la chiamata al
piano desiderato della cabina; tre led per indicare la presenza al piano.
Per l'arresto della cabina sono stati posizionati due finecorsa per i piani estremi (piano
terra; 2° piano) mentre per il piano centrale e stata posizionata una fotocellula.
Il movimento è realizzato da un alzacristalli sul quale è fissata la cabina.
7 – APPARECCHI DI MANOVRA E PROTEZIONE
PDF created with pdfFactory trial version www.pdffactory.com
Un apparecchio di mavrova è un dispositivo in grado di eseguire manovre di apertura
e di chiusura di un circuito.
Le manovre posso avvenire a carico, ossia in presenza di corrente nel circuito, oppure
a vuoto, in assenza di corrente in quanto il circuito è interrotto in un altro punto.
L'apertura a carico interrompe la corrente, mentre la chiusura a carico stabilisce la
corrente nel circuito. Le manovre possono anche avvenire in condizioni di normale
esercizio oppure in condizioni di funzionamento anormale, a causa di guasti
sull'impianto. In relazione al tipo di comando si distingue il comando manuale,
effettuato dall'operatore, dal comando automatico, determinato dall'intervento di un
dispositivo di protezione o da un sistema di controllo.
Accoppiando apparecchi di manovra e dispositivi di protezione dalle sovracorrenti
(fusibili, sganciatori di massima corrente) si ottengono apparecchiature di manovra e
protezione contro sovraccarichi e corto circuiti.
Nel prototipo realizzato è stato inserito un interruttore in serie all'alimentazione, e
un'altro interruttore (che in realtà sarebbe un deviatore a tre posizioni collegato per
funzionare in modalità on-off) che tramite la programmazione del PLC va ad
intervenire sull'alimentazione del motore, mantenendo così in funzione tutte le altre
apparecchiature.
PDF created with pdfFactory trial version www.pdffactory.com
I.T.I.S “P. HENSEMBERGER”
Monza
Indirizzo Elettrotecnica e Automazione
A.S. 2007/2008
PROGETTAZIONE E
REALIZZAZIONE
DI UN ASCENSORE DIDATTICO
CONTROLLATO DA PLC
Alunno : Cester Fabio
Classe: 5B1
Supervisore lavoro Prof. Fransosa Pasquale
Docente responsabile Prof. Rizzaro Giuseppe
1
PDF created with pdfFactory trial version www.pdffactory.com
Indice
1 - Presentazione del progetto.................................pag 3
2 - Introduzione sull'ascensore................................pag 4
2.1 - Cenni storici...........................................pag 4
2.2 - Cenni teorici...........................................pag 5
3 - Cenni sul motore in corrente continua..................pag 6
3.1 - Motore a spazzole...................................pag 6
3.2 - Motore brushless....................................pag 7
4 – Normative......................................................pag 8
5 – Programmazione.............................................pag 10
5.1 - Cenni sul PLC........................................pag 10
5.2 - Virtual PLC............................................pag 11
5.2.1 - Progetto in linguaggio KOP e AWL...pag 11
5.3 – Moeller.................................................pag 16
5.3.1 – Descrizione del programma in linguaggio
ladder.........................................pag 18
6 - Realizzazione pratica........................................pag 19
6.1 – Progettazione........................................pag 19
6.2 – Materiali...............................................pag 19
6,3 – Assemblaggio........................................pag 19
7 - Apparecchi di manovra e protezione...................pag 20
PDF created with pdfFactory trial version www.pdffactory.com
1 – PRESENTAZIONE DEL PROGETTO
Il progetto che verrà sviluppato in questa relazione consiste nella progettazione,
simulazione e realizzazione di un ascensore in scala comandato da PLC.
Nella fase di progettazione è stato realizzato il programma per il PLC che andrà a
comandare tutti i dispositivi (motore, led), ed è stato dimensionato il possibile aspetto
che avrebbe dovuto avere l'ascensore una volta ultimato (anche se subirà molte
variazioni).
Nella fase di simulazione è stato caricato il programma realizzato in precedenza in un
simulatore virtuale ( Virtual PLC ) ed è stato verificato il corretto funzionamento.
Nella fase di realizzazione infine si è costruito un modellino in scala di ascensore
attraverso l'utilizzo di un alzacristalli elettrico per automobili.
2 – INTRODUZIONE SULL'ASCENSORE
2.1 – Cenni storici
Sicuramente una delle prime situazioni in cui si è sentita la necessità di
un’attrezzatura idonea a trasportare in verticale uomini e materiali è quella delle
miniere. Sono dell'inizio del XIX secolo i primi studi per dotare quei primitivi
apparecchi di un motore a vapore che sostituisse l'energia umana.
Il primo sviluppo fondamentale che si ebbe in direzione dell'ascensore come oggi è
conosciuto venne dato da un inventore americano, Elisha Otis, che nel 1853 depositò
il brevetto di un sistema di sicurezza paracadute, destinato ad impedire la caduta
violenta della cabina in caso di guasti o rotture ai cavi. La prima applicazione pratica si
ebbe nel 1857 a New York e, negli anni successivi, altri famosi ingegneri lo
perfezionarono con l'adozione di circuiti idraulici e con l'invenzione dell'ascensore
elettrico, fatta risalire al 1880 in Germania da parte di Werner von Siemens.
Una delle prime spettacolari applicazioni della nuova invenzione è quella vista nel
1889 in Francia in occasione della presentazione della Tour Eiffel a Parigi.
Le tappe più importanti nell'evoluzione dell'ascensore possono essere considerate
quelle dell'abolizione del manovratore, datata 1924, e successivamente l'introduzione
delle porte ad apertura automatica al posto di quelle manuali. Notevoli progressi si
sono registrati anche nel campo dei "quadri di manovra", deputati al controllo e alla
gestione dell'impianto. Superati gli obsoleti pannelli elettromeccanici senza particolari
flessibilità di funzionamento, i moderni sistemi elettronici con microprocessori
consentono un esercizio adattabile ad ogni genere di edificio ed utilizzo (prenotazioni
di chiamata, corse con arresti intermedi per "raccogliere" e "riempire" la cabina fino al
raggiungimento del massimo carico, ecc.).
Fra le ultime evoluzioni citiamo:
- la regolazione elettronica della velocità: oltre a rendere estremamente dolci
le fasi di avvio e fermata della cabina, permettono l'arresto della stessa
esattamente in corrispondenza del piano; questa è inoltre una condizione
necessaria al soddisfacimento delle ultime norme in materia di sicurezza (fra
le maggiori cause di incidente si registrano proprio gli inciampi sugli scalini
che si creano fra piano e cabina), e precisamente il raggiungimento di
adeguata precisione di fermata e di livellazione al piano, come richiesto dalla
norma per l'accessibilità degli ascensori anche ai disabili EN 81-70;
- l'eliminazione del "vano o locale macchina" mediante lo spostamento di
PDF created with pdfFactory trial version www.pdffactory.com
-
motore, argano e apparecchiature di comando - realizzati in forma molto
compatta - all'interno del vano di corsa allo scopo di risparmiare spazio
all'interno dell'edificio;
la riduzione degli spazi verticali di sicurezza nel vano ascensore, in alto e/o
in basso, in modo da ridurre gli ingombri verticali dell'ascensore nell'edificio,
specie se preesistente.
2 – 2 Cenni teorici
Per ascensore si intende un apparecchio elevatore con installazione fissa che serve
piani definiti mediante una cabina che si sposta lungo guide rigide e la cui inclinazione
sull'orizzontale è superiore a 15 gradi, destinato al trasporto di persone.
Gli ascensori o elevatori (definizione dell'ultima direttiva comunitaria 95/16/CE del 29
giugno 1995 recepita in Italia con il D.P.R. n. 162 del 30 aprile 1999 ) possono essere:
-
Elettrici (a fune);
Oleodinamici (comunemente noti come idraulici poiché nei primi il fluido
usato era l'acqua).
L'ascensore elettrico moderno è composto principalmente dai seguenti elementi:
1. Macchinario di sollevamento (detto anche argano)
2. Cabina passeggeri
3. Contrappeso (che ha funzioni anche di bilanciamento con conseguente riduzione
della potenza elettrica impegnata e dei consumi energetici)
4. Funi di trazione
5. Quadro elettrico di manovra
6. Dispositivi di sicurezza comprendenti: Limitatore di velocità, Paracadute.
L'ascensore oleodinamico moderno è composto principalmente dai seguenti elementi:
1.
2.
3.
4.
5.
Centralina idraulica
Cilindro e pistone
Cabina passeggeri
Quadro elettrico di manovra
Dispositivi di sicurezza comprendenti: Paracadute, Valvola di blocco
6. Può inoltre comprendere anche delle funi d trazione.
I due azionamenti si differenziano nel modo con cui viene imposto il movimento. Con
un ascensore elettrico è il macchinario di sollevamento che trasmette il movimento
alle funi che reggono la cabina per mezzo dell'attrito sulla puleggia di frizione; il
motore elettrico funziona in entrambe le direzioni di marcia: salita e discesa.
Con un ascensore oleodinamico è la centralina idraulica che fornisce l'energia ad un
fluido per mezzo di una pompa di tipo volumetrico e di una serie di valvole
(generalmente un olio con speciali additivi) che muove a sua volta il pistone
permettendogli di fuoriuscire dal cilindro; in questo caso il motore elettrico funziona
quando la cabina va in salita poiché in discesa è la forza di gravità a muoverla.
Un ascensore che trasporta solamente materiali, senza che vi sia la possibilità di
accompagnamento umano, è definito montacarichi , e non è soggetto alla Direttiva
Ascensori, bensì alla Direttiva Macchine.
Un particolare e curioso tipo di ascensore a funzionamento continuo è il paternoster.
L'Italia è il paese con il maggior numero di ascensori al mondo - nel 2006 tra i
750.000 e gli 800.000 impianti - e se ne installano ogni anno da 15.000 a 20.000
nuovi.
PDF created with pdfFactory trial version www.pdffactory.com
In Italia gli impianti esistenti devono essere verificati ogni 2 anni (ovvero ogni qual
volta ci sia una rimessa in servizio a seguito di modifiche rilevanti, trasformazioni,
incidenti ecc.) da un ingegnere abilitato ed iscritto all'Albo facente capo ad un Ente
notificato che ha ottenuto l'autorizzazione ministeriale.
3 - CENNI SUL MOTORE IN CORRENTE CONTINUA
Illustrazione 1: Un semplice motore DC.
Quando la corrente scorre negli avvolgimenti, si genera un campo magnetico
intorno al rotore. La parte sinistra del rotore è respinta dal magnete di sinistra ed
attirata da quello di destra. Analogalmente fa la parte ina basso a destra. La
coppia genera la rotazione.
3.1 - Motore a spazzole
Il classico motore in corrente continua ha una parte che gira detta appunto rotore o
anche armatura e una parte che genera un campo magnetico fisso (nell'esempio i due
magneti colorati) detta statore. Un interruttore rotante detto commutatore o collettore
a spazzole inverte due volte ad ogni giro la direzione della corrente elettrica che
percorre i due avvolgimenti generando un campo magnetico che entra ed esce dalle
parti arrotondate dell'armatura. Nascono forze di attrazione e repulsione con i magneti
permanenti fissi (indicati con N ed S nelle figure).
La velocità di rotazione dipende da:
• Tensione applicata.
• Corrente assorbita dal rotore.
• Carico applicato.
La coppia generata è proporzionale alla corrente. Il controllo più semplice agisce sulla
tensione di alimentazione. Nei sistemi più complessi si usa un Controllo automatico in
retroazione che legge le variabili per generare la tensione da applicare al motore. Il
motore CC a magneti permanenti ha un comportamento reversibile: diventa un
generatore di corrente continua se si collega un altro motore all'albero. Si può allora
prelevare l'energia elettrica prodotta collegandosi alle spazzole.
Il suo limite principale è nella necessità del commutatore a spazzole:
• Le spazzole sono in grafite, mentre nei piccoli servomotori e nei tipi utilizzati
nei lettori CD/DVD o registratori a cassette sono in lega metallica bianca.
La differenza è nella frequenza della loro sostituzione, infatti nelle macchine
PDF created with pdfFactory trial version www.pdffactory.com
utensili come smerigliatrici o trapani, si utilizzano spazzole in grafite, perché è
molto semplice e veloce sostituirle, le spazzole in metallo, sono usate su
apparecchi dove risulta scomodo o non conveniente cambiarle, come nei motori
d'avviamento dei mezzi di trasporto.
• Le spazzole pongono un limite alla massima velocità di rotazione: maggiore è la
velocità e più forte è la pressione che bisogna esercitare su di esse per
mantenere un buon contatto, comunque i motori usati negli aspirapolvere e
negli elettroutensili portatili (trapani, mole, ect.) possono raggiungere i 3500045000 giri al minuto.
• Tra spazzole e collettore, nei momenti di commutazione, si hanno transitori di
apertura degli avvolgimenti induttivi e quindi scintillio (attenuabile con
opportuni sistemi ma non eliminabile).
• Queste scintille comportano disturbi elettrici sia irradiati nell'ambiente
circostante che trasmessi al generatore di tensione (che alimenta il motore);
questi disturbi, in determinati settori di impiego, possono causare problemi di
compatibilità elettromagnetica.
La presenza di avvolgimenti elettrici sul rotore ha anche due aspetti negativi:
• Se il motore è di grossa potenza si hanno dei problemi di smaltimento del
calore (gli avvolgimenti si riscaldano per effetto Joule e il campo magnetico
alternato nel nucleo del rotore genera altre perdite, causate da isteresi
magnetica e correnti parassite nel nucleo stesso, e quindi altro calore.
• Gli avvolgimenti appesantiscono il rotore (aumenta il momento d'inerzia): se il
motore deve rispondere con rapidità e precisione (come avviene nelle
automazioni industriali e nella robotica) il controllo diventa più complesso; per
piccole potenze (da 1 a 200W) e servocontrolli a volte si usano particolari tipi di
motori con rotore con avvolgimenti a forma di bicchiere e privo del nucleo di
ferro, detti "ironless": hanno bassa inerzia e rendimento elettrico più elevato dei
loro corrispondenti con rotore avvolto su nucleo di ferro.
3.2 - Motore brushless
I problemi illustrati si potrebbero evitare scambiando il rotore con lo statore (cioè se
gli avvolgimenti venissero messi sulla parte fissa e i magneti fossero montati sul
rotore). Scomparirebbe il collettore a spazzole, e gli avvolgimenti elettrici potrebbero
smaltire più facilmente il calore generato. È quello che si fa nei motori brushless (in
inglese letteralmente: senza spazzole). Essi permettono inoltre di ridurre
ulteriormente le dimensioni del rotore (e quindi le sue inerzie) usando materiali
magnetici più efficienti come le leghe di samario-cobalto. In questi motori il circuito
di alimentazione deve essere più sofisticato, dato che le funzioni del collettore
meccanico sono svolte tramite un controllo elettronico di potenza.
Motore CC con statore a filo avvolto
Nei motori CC lo statore può essere realizzato non con magneti permanenti ma,
similmente al rotore, con avvolgimenti su materiale ad alta permeabilità in cui viene
fatta scorrere della corrente: questo circuito è detto di eccitazione. In questo modo si
possono avere potenze maggiori (ma si dovrà spendere più energia anche per
alimentare questo nuovo circuito). Si possono avere vari casi nell'alimentazione del
circuito di statore:
• motore ad eccitazione indipendente: l'avvolgimento di statore è alimentato in
maniera indipendente da quello di rotore. Si ha allora più flessibilità nel
controllo dei parametri (coppia e velocità) del motore.
• motore ad eccitazione in parallelo: statore e rotore sono collegati in parallelo
(coppia maggiore, minore velocità)
PDF created with pdfFactory trial version www.pdffactory.com
• motore ad eccitazione in serie: statore e rotore sono collegati in serie (coppia
inferiore e asintotica allo zero con l'aumentare del regime, maggiore velocità,
definito anche come motore in fuga).
Si possono avere anche situazioni intermedie utilizzate in passato soprattutto nella
trazione elettrica (dove è richiesta molta coppia allo spunto e maggiore velocità a
regime).
Il motore con statore a filo avvolto può essere alimentato sia in corrente continua
che in alternata, e per questo motivo è chiamato anche motore universale; di fatto,
nella maggior parte delle applicazioni, questo tipo di motore è alimentato in corrente
alternata. La disponibilità a costi contenuti di dispositivi elettronici (come circuiti
integrati, ponti raddrizzatori, dispositivi di potenza a semiconduttore, ecc.), alcune
applicazioni che in passato sarebbero state realizzate con motori universali ora
vengono sviluppate con motori CC con magneti permanenti, permettendo ad esempio
un controllo della velocità più preciso e rendimento elettrico maggiore (nei piccoli
motori la potenza spesa per l'eccitazione è spesso rilevante, mentre diviene
percentualmente esigua nei grandi motori).
4 - NORMATIVE:
§
§
§
§
§
§
§
§
§
§
§
§
- G.U. n. L. 213 del 07.09.1995 - "Direttiva del Parlamento Europeo e del Consiglio,
del 29.06.1995, per il riavvicinamento delle legislazioni degli Stati Membri relative agli
ascensori".
D.P.R. 162/99 - G.U. n. 134 del 10.06.1999 - "Regolamento recante norme per
l'attuazione della Direttiva 95/16/CE sugli ascensori e di semplificazione dei
procedimenti per la concessione del nulla osta per ascensori e montacarichi nonché
della relativa licenza di esercizio".
D.P.R. 369/00 - G.U. n. 291 del 14.12.2000 - "Regolamento recante modifica al D.P.R.
n. 162/99 in materia di collaudo ascensori"
EN 81-1 - Ed. novembre 2005 - "Regole di sicurezza per la costruzione e l'installazione
degli ascensori. Parte 1: Ascensori elettrici".
EN 81-2 - Ed. novembre 2005 - "Regole di sicurezza per la costruzione e l'installazione
degli ascensori. Parte 2: Ascensori idraulici".
UNI 10411 - 1 - Ed. dicembre 2003 rev. all'ed. 09/1998 - "Modifiche ad ascensori
elettrici preesistenti".
UNI EN 81-28 - Ed. maggio 2004 - "Regole di sicurezza per la costruzione e
l'installazione degli ascensori - Ascensori per il trasporto di persone e merci Teleallarmi per ascensori e ascensori per merci".
Direttiva 95/16/CE UNI EN 81-70 - Ed. maggio 2004 - " Regole di sicurezza per la
costruzione e l'installazione degli ascensori - Applicazioni particolari per ascensori per
passeggeri e per merci - Accessibilità agli ascensori delle persone, comprese i
disabili".
UNI EN 81-72 - Ed. maggio 2004 - " Regole di sicurezza per la costruzione e
l'installazione degli ascensori – Applicazioni particolari per ascensori per passeggeri e
merci - Ascensori antincendio".
UNI EN 81-80 - Ed. maggio 2004 - " Regole di sicurezza per la costruzione e
l'installazione degli ascensori - Ascensori esistenti - Regole per il miglioramento della
sicurezza degli ascensori per passeggeri e degli ascensori per merci esistenti".
UNI EN 13015 - Ed. maggio 2002 corretta il 19.06.2002 - " Manutenzione di ascensori
e scale mobili. Regole per le istruzioni di manutenzione".
UNI EN 12015 e UNI EN 12016 - Ed. luglio 1999 - "Compatibilità elettromagnetica.
PDF created with pdfFactory trial version www.pdffactory.com
§
§
§
§
§
Norma per famiglia di prodotti per ascensori, scale mobili e marciapiedi mobili.
Emissione e immunità".
D.P.R. 459/96 - Ed. luglio 1996 - "Regolamento per l'attuazione delle direttive
89/392/CEE, 91/368/CEE, 93/44/CEE e 93/68/CEE concernenti il riavvicinamento delle
legislazioni degli Stati Membri relative alle macchine".
LEGGE 13/89 - G.U. n. 21 del 26.01.1989 - "Disposizioni per favorire il superamento e
l'eliminazione delle barriere architettoniche negli edifici privati".
D.M. 236/89 - G.U. n. 145 del 23.06.1989 - "Prescrizioni tecniche necessarie a
garantire l'accessibilità, l'adattabilità e la visibilità degli edifici privati e di edilizia
residenziale pubblica sovvenzionata e agevolata, ai fini del superamento e
l'eliminazione delle barriere architettoniche".
D.M. 587/87 - G.U. n. 71 del 25.03.1988 - "Attuazione delle direttive n. 84/528/CEE e
n. 86/312/CEE relative agli ascensori elettrici".
D.P.R. 1467/63 - G.U. n. 298 del 16.11.1963 - "Norme per gli ascensori ed i
montacarichi in servizio privato".
Dalla Gazzetta Ufficiale del 23 giugno del 1989 sono stati definiti i seguenti
punti:
L’ascensore deve avere una cabina di dimensioni minime tali da permettere l’uso da
parte di una persona su sedia a rotelle.
Le porte di cabina e di piano devono essere di tipo automatico e di dimensioni tali da
permettere l’accesso alla sedia a ruote.
Nell’interno della cabina devono essere posti un citofono, un campanello d’allarme,
una luce di emergenza.
Il ripiano di fermata, anteriormente alla porta della cabina deve avere una profondità
tale da contenere una sedia a ruote e le manovre per l’accesso.
Deve essere prevista la segnalazione sonora dell’arrivo al piano e un dispositivo
luminoso per segnalare ogni eventuale stato di allarme.
Le porte di cabina e di piano devono essere del tipo a scorrimento automatico.
Nel caso di adeguamento la porta può essere incernierata purchè dotata di sistema
per apertura automatica.
In tutti i casi le porte devono rimanere aperte per almeno 8 secondi e il tempo di
chiusura non deve essere inferiore ai 4 sec.
L’arresto dei piani deve avvenire con autolivellamento con tolleranza max. di + 2 cm.
La bottoniera di comando interna ed esterna deve avere i bottoni ad una altezza
compresa tra 1.10 e 1.40 m e deve essere posta su una parete ad almeno 35 cm
dalla porta della cabina.
I pulsanti di comando devono prevedere la numerazione in rilievo e le scritte con
traduzione in Braille.
Si deve prevedere la segnalazione sonora dell’arrivo al piano e, ove possibile ,
l’installazione di un sedile ribaltabile con ritorno automatico.
5 - PROGRAMMAZIONE
5.1 - CENNI SUL PLC:
Il PLC è un controllore a logica programmabile (Programmable Logic Controller) è un
computer industriale specializzato in origine nella gestione dei processi industriali. Il
PDF created with pdfFactory trial version www.pdffactory.com
PLC esegue un programma ed elabora i segnali digitali ed analogici provenienti da
sensori e diretti agli attuatori presenti in un impianto industriale, nel tempo, è
entrato anche nell'uso domestico; l'installazione di un PLC nel quadro elettrico di
un'abitazione, a valle dell’interruttore magnetotermico e differenziale, permette la
gestione automatica dei molteplici sistemi e impianti installati nella casa: impianto di
riscaldamento, antifurto, irrigazione, luci, ecc...
Un PLC è composto da un alimentatore, dalla CPU che in certi casi può avere interna
o esterna una memoria RAM o Flash o EPROM, da un certo numero di schede di
ingressi digitali e uscite digitali, e nel caso in cui sia necessario gestire grandezze
analogiche, il PLC può ospitare delle schede di ingresso o di uscita sia analogiche che
digitali.
L’alimentatore:
Fornisce le tensioni a 5 V necessarie alle schede, le tensioni a + o - 12 V, le altre
tensioni necessarie, sempre in corrente continua (cc.). Può essere interno o esterno
al PLC.
La CPU
È il cervello del PLC. La CPU è una scheda complessa basata su un microprocessore
con un sistema operativo proprietario, e con una zona di memoria a disposizione del
programma utente, cioè del programma di automazione. Una delle caratteristiche
proprie delle CPU dei PLC è la loro capacità di poter gestire le modifiche del
programma di gestione del processo durante il normale funzionamento. Questa
possibilità è estremamente utile nel caso di impianti che devono essere sempre attivi.
I moduli di ingresso/uscita:
I moduli di ingresso uscita costituiscono l’interfaccia del PLC con il processo da
controllare. Questi moduli possono trattare segnali di tipo analogico o digitale. Il
motivo della presenza di moduli specializzati consiste nel fatto che i segnali generati
dai trasduttori, anche quelli ad uscita logica, non possono venire direttamente
interfacciati alla elettronica del modulo processore, a causa di differenze nel livello di
segnale o tipologia. Ciascun ingresso ed uscita dei moduli di I/O (via di
ingresso/uscita) è identificata dal sistema operativo del PLC in base alla posizione che
occupa. Questo significa che non è possibile riconfigurare dinamicamente le vie del
PLC ma queste sono fissate al momento del cablaggio. I moduli assicurano le
funzionalità di filtraggio (analogico e digitale) degli ingressi e la protezione contro
sovratensioni ed inversione di polarità degli ingressi.
La memoria del PLC :
Per poter memorizzare il programma da eseguire e i dati che ne derivano il PLC
necessita di memorie , i tipi di memorie sono:
Memoria Statica
Nei PLC di prima concezione la memoria era di tipo Statico, quindi all'utente erano
assegnate delle aree "preconfezionate" con quantitativi fissi di dati memorizzabili
all'interno, e che non potevano essere cambiati in alcun modo. La memoria era
rigidamente divisa tra dati e programmi ed anche tra tipi diversi di dati. Questo
sistema è ancora ampiamente usato per piccoli PLC con applicazioni semplici e pochi
ingressi e uscite da gestire, dove la gestione della memoria in un modo piuttosto che
in un altro non influisce nel risultato.
Memoria Dinamica
Nei PLC più moderni la memoria interna è di tipo Dinamico, e può essere considerata
PDF created with pdfFactory trial version www.pdffactory.com
come un Hard Disk di un Personal Computer, con file di dati e file di programmi. In
fase di caricamento del software applicativo il PLC alloca dinamicamente la memoria a
seconda delle risorse che sono richieste. A parte certe aree di sistema, ed alcune aree
preconfezionate al fine di facilitare la programmazione ai meno esperti, la memoria
per il resto è liberamente configurabile. Si possono decidere nuove aree dati, anche
dello stesso tipo, ma usate da sottoprogrammi diversi ed in fasi diverse. Ogni area
dati può avere un nome, denominato Nome File. Per i programmi valgono le stesse
considerazioni.
5.2 - VIRTUALPLC:
VirtualPLC è un programma che permette di simulare delle utilizzazioni varie del PLC.
Tramite questo programma di simulazione noi abbiamo realizzato il programma di
funzionamento di un ascensore.
5.2.1 - PROGETTO IN LINGUAGGIO KOP e AWL:
Linguaggio KOP:
Ladder diagram (KOP) detto Linguaggio a contatti - È il linguaggio più usato fino a
pochi anni fa, in quanto era la trasposizione informatica dei circuiti elettrici usati dagli
elettrotecnici.
L'automazione industriale, infatti, era basata su sistemi a logica cablata, il PLC ha
permesso di trasportare i concetti della logica cablata nel linguaggio Ladder. Il
programmatore semplicemente utilizza simboli logici corrispondenti a segnali di
ingresso e di uscita per implementare la logica non più cablando i relè, ma disegnando
gli schemi elettrici.
Linguaggio AWL: Instruction List (AWL) detto Lista di istruzioni - Linguaggio di
semplice molto simile all'Assembler. Può essere facilmente ricavato dal Ladder.
PDF created with pdfFactory trial version www.pdffactory.com
Linguaggio KOP:
PDF created with pdfFactory trial version www.pdffactory.com
PDF created with pdfFactory trial version www.pdffactory.com
PDF created with pdfFactory trial version www.pdffactory.com
Tabella input/output:
Simobolo
Indirizzo
Commento
SQ1
I0,0
Micro (NC) presenza cabina piano Terra
SQ2
I0,1
Micro (NC) presenza cabina 1° Piano
SQ3
I0,2
Micro (NC) presenza cabina 2° Piano
SQ4
I0,3
Micro (NC) presenza cabina 3° Piano
SQ5
I0,4
Micro (NO) Porte chiuse
SB1
I0,5
Pulsante (NO) Chiamata piando Terra
SB2
I0,6
Pulsante (NO) Chiamata 1° Piano
SB3
I0,7
Pulsante (NO) Chiamata 2° Piano
SB4
I1,0
Pulsante (NO) Chiamata 3° Piano
SB5
I1,1
Pulsante (NO) arresto cabina
SB6
I1,2
Pulsante (NO) Mandata 3° Piano
SB7
I1,3
Pulsante (NO) Mandata 2° Piano
SB8
I1,4
Pulsante (NO) Mandata 1° Piano
SB9
I1,5
Pulsante (NO) Mandata piano Terra
B1
I1,6
Contatto (NO) Fotocellula presenza persone
SQ6
I1,7
Micro (NC) apertura Porte
KM1
Q0,0
Teleruttore Salita cabina
KM2
Q0,1
Teleruttore Discesa cabina
KM3
Q0,2
Teleruttore Chiusura porte
KM4
Q0,3
Teleruttore Apertura porte
HL1
Q0,4
Lampada Piano Terra
HL2
Q0,5
Lampada 1° Piano
HL3
Q0,6
Lampada 2° Piano
HL4
Q0,7
Lampada 3° Piano
HL5
Q1,0
Lampada Cabina 3° Piano
HL6
Q1,1
Lampada Cabina 2° Piano
HL7
Q1,2
Lampada Cabina 1° Piano
HL8
Q1,3
Lampada Cabina piano Terra
PDF created with pdfFactory trial version www.pdffactory.com
5.3 - MOELLER:
Poiché Virtual PLC è un programma esclusivamente virtuale e non è possibile eseguire
il download del progetto su nessun PLC abbiamo dovuto utilizzare un software
alternativo.
Il software da noi utilizzato è easy soft 5 della MOELLER che ha la possibilità di
interfacciarsi con il PLC in dotazione alla scuola.
PDF created with pdfFactory trial version www.pdffactory.com
PDF created with pdfFactory trial version www.pdffactory.com
Tabella input/output
PDF created with pdfFactory trial version www.pdffactory.com
Simbolo
Indirizzo
Commento
Pulsante P:T
I0,1
Pulsante (NO) chiamata piano terra
Pulsante P 1°
I0,2
Pulsante (NO) chiamata 1° piano
Pulsante P 2°
I0,3
Pulsante (NO) chiamata 2° piano
Stop
I0,4
Interruttore arresto motore
F:C. P.T.
I0,7
Micro (NO) presenza piano terra
F.C. P.1°
I0,8
Fotocellula (NO) presenza 1° P
F.C. P.2°
I0,9
Micro (NO) presenza 2° piano
Comm. discesa
Q0,1
Commutazione motore per la discesa
Comm. salita
Q0,2
Commutazione motore per la salita
Led P.T
Q0,3
Segnalazione di presenza piano terra
Led P.1°
Q0,4
Segnalazione di presenza 1° P
Led P.2°
Q0,5
Segnalazione di presenza 2° P
5.3.1 - Descrizione del programma in linguaggio ladder:
Nelle prime sei stringhe di comando ci sono le informazioni il che serviranno per
mettere in funzione il motore, nelle prime tre stringhe con la funzione di discesa, in
quelle successive per la salita. In queste stringhe come primo componente viene
inserito il dispositivo (finecorsa, fotocellula) che ci permette di capire in che piano si
trova la cabina in un preciso istante, successivamente viene posizionato il pulsante
per la scelta del piano a cui si vuole andare e per far si che la cabina si fermi viene
messo il finecorsa (in questo caso normalmente chiuso) in modo che nel momento in
cui viene attivato apre il circuito di attivazione del motore.
Nelle stringhe sette e otto si può vedere nel dettaglio quali merker attivano la
commutazione di salita e quella di discesa. In entrambe viene inserito un interruttore
(con comando manuale) che ha la funzione di tagliare l'alimentazione al motore in
caso di problemi (ad esempio se il motore non dovesse più rispondere ai comandi e
quindi proseguire il movimento nonostante sia alla fine della guida predisposta al
movimento) senza la necessità di scollegare il PLC.
Nell'ultima parte di programma è presente la segnalazione di presenza al piano in cui
si trova la nostra cabina, quindi ci sarà il finecorsa di ogni piano che dara il seganle al
rispettivo led .
PDF created with pdfFactory trial version www.pdffactory.com
6 - REALIZZAZIONE PRATICA
6.1 - PROGETTAZIONE
Questo progetto è stato sviluppato partendo da una esercitazione svolta nel
laboratorio di sistemi tramite l'utilizzo del programma Virtual PLC che permette di
simulare il funzionamento di un ascensore.
Successivamente si è deciso di realizzare un prototipo di un ascensore.
I problemi nella progettazione sono stati riscontrati sin dall'inizio, nella scelta delle
dimensioni che avrà l'ascensore una volta unltimato, successivamente la scelta del
motore ( m.c.c.; alzacristalli elettrico per automobili; motore di un'antenna per
automobili).
Questi sono due dei problemi che sono stati risolti, mentre uno che non è stato
superato è la realizzazione delle porte e della loro apertura.
6.2 - Materiali:
Alzacristalli per automobile (m.c.c. con sistema di carrucole per il movimento)
Scatola PLC (alimentatore, PLC, gruppo relè, 3 pulsanti, 3 deviatori)
Plexiglas
Base in legno
n° 4 Angolari in alluminio
n° 3 Led
n° 3 Resistenze 2,2 kohm
n° 1 Cabina (in PVC)
n° 1 Fotocellula
n° 2 Microinterruttori (finecorsa)
n° 3 Pulsanti (prelevati da un lettore DVD)
n°2 Morsettiere
Capicorda
6.3 - Costruzione:
Sulla base in legno è stata realizzata una struttura in plexiglas nella quale è stato
inserito il nostro ascensore.
Sul pannello frontale sono stati posizionati: tre pulsanti per effettuare la chiamata al
piano desiderato della cabina; tre led per indicare la presenza al piano.
Per l'arresto della cabina sono stati posizionati due finecorsa per i piani estremi (piano
terra; 2° piano) mentre per il piano centrale e stata posizionata una fotocellula.
Il movimento è realizzato da un alzacristalli sul quale è fissata la cabina.
PDF created with pdfFactory trial version www.pdffactory.com
7 – APPARECCHI DI MANOVRA E PROTEZIONE
Un apparecchio di mavrova è un dispositivo in grado di eseguire manovre di apertura
e di chiusura di un circuito.
Le manovre posso avvenire a carico, ossia in presenza di corrente nel circuito, oppure
a vuoto, in assenza di corrente in quanto il circuito è interrotto in un altro punto.
L'apertura a carico interrompe la corrente, mentre la chiusura a carico stabilisce la
corrente nel circuito. Le manovre possono anche avvenire in condizioni di normale
esercizio oppure in condizioni di funzionamento anormale, a causa di guasti
sull'impianto. In relazione al tipo di comando si distingue il comando manuale,
effettuato dall'operatore, dal comando automatico, determinato dall'intervento di un
dispositivo di protezione o da un sistema di controllo.
Accoppiando apparecchi di manovra e dispositivi di protezione dalle sovracorrenti
(fusibili, sganciatori di massima corrente) si ottengono apparecchiature di manovra e
protezione contro sovraccarichi e corto circuiti.
Nel prototipo realizzato è stato inserito un interruttore in serie all'alimentazione, e
un'altro interruttore (che in realtà sarebbe un deviatore a tre posizioni collegato per
funzionare in modalità on-off) che tramite la programmazione del PLC va ad
intervenire sull'alimentazione del motore, mantenendo così in funzione tutte le altre
apparecchiature.
PDF created with pdfFactory trial version www.pdffactory.com