# ESEMPI DI REALIZZAZIONE ELETTRICA DELLE AZIONI
ELEMENTARI ANTICIPATRICE ED ATTENUATRICE #
E’ interessante e opportuno mostrare alcuni esempi di come possono venire
realizzate praticamente le funzioni elementari di correzione tramite ricorso a
reti elettriche passive di tipo RC.
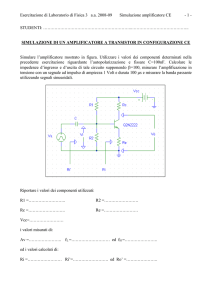
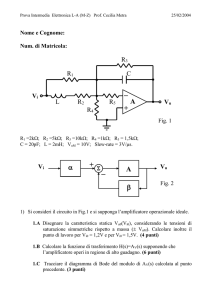
Consideriamo la seguente rete (rete anticipatrice):
R1
C
Vi
R2
Determiniamo la f. di t. tra la
tensione in ingresso Vi e la
tensione in uscita Vu.
Vu
Le ipotesi di lavoro sono:
• impedenza in ingresso nulla;
• impedenza ai morsetti d’uscita infinita (tensione a vuoto o a circuito
aperto).
Tali ipotesi corrispondono alle ipotesi di non interazione con i blocchi adiacenti
(assenza di effetti di carico).
Ponendo:
Z1 =
R1
1 + R1Cs
e
si può utilizzare la regola del
Z2=R2
partitore di tensione e scrivere:
G(s) =
e ponendo
G ( s) =
Vu ( s)
Z2
=
=
Vi ( s ) Z 1 + Z 2
R2
1
=
<1
R1 + R2 ma
1 (1 + τ a s )
ma τ a
1 +
s
ma
e
R2
R2 +
R1
1 + R1Cs
R1C=τa
=
(1 + R1Cs )
R2
R1 + R2
R2
1 +
R1Cs
R1 + R2
si ottiene:
che, a parte il guadagno 1/ma (attenuazione) è
proprio la f. di t. caratteristica di una azione anticipatrice.
1
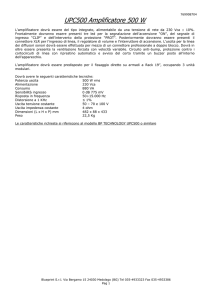
Per ottenere la correzione anticipatrice definita in precedenza come la f. di t.:
Cant ( s ) = K C
1+ τas
1+
τa
ma
s
bisogna mettere in serie alla rete (a valle) l’amplificatore A di guadagno Kcma:
+
R.C.
_
A
P
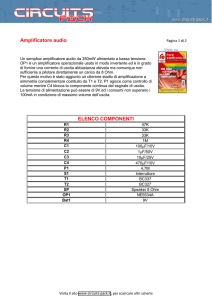
Consideriamo adesso la rete (rete attenuatrice):
R1
R2
Vi
Vu
C
Ponendo:
scrivere:
Z1=R1 e Z2=R2 +1/Cs sempre per la regola del partitore si può
G(s) =
Vu ( s )
Z2
=
=
Vi ( s ) Z1 + Z 2
R2 +
1
Cs
R1 + R2 +
1
Cs
=
1 + R2 Cs
( R1 + R2 )Cs + 1
e ponendo: (R1+R2)C=τi e (R1+R2)/R2= mi>1 segue R2C=τi/ mi cioè:
τi
1+
s
mi
G ( s ) = C ' att ( s ) =
1+τ is
che è la f. di t. della rete che realizza un’azione attenuatrice, a parte il guadagno
Kc che viene introdotto al solito da un amplificatore in serie.
2
# LA FUNZIONE DI CORREZIONE EQUIVALENTE #
Le azioni correttrici di tipo anticipatrice ed attenuatrice che abbiamo esaminato
sono azioni stabilizzanti particolarmente semplici e tipiche.
L’azione correttrice complessiva, che deve tener conto anche della necessità di
influire sul transitorio, non solo da un punto di vista della stabilizzazione ma in
rapporto ad esigenze di prontezza etc. , può essere svolta solo in casi semplici
con una delle due funzioni di trasferimento elementari considerate. In molti casi
si tratta di impiegare più volte una stessa funzione (in genere con valori diversi
dei parametri) o ambedue in diverse bande di frequenze come vedremo in
seguito o, più in generale, una opportuna funzione della frequenza con un
determinato andamento dell’ampiezza e della fase.
Naturalmente nella scelta della struttura di queste funzioni occorre tener conto
dei vincoli derivanti dalla natura fisica dei dispositivi che si intendono utilizzare.
Il problema della sintesi si può cioè affrontare in una maniera più generale,
facendo riferimento sempre allo schema a controreazione standard di figura, ma
considerando la G1 come una funzione di correzione equivalente e non
necessariamente come la funzione di trasferimento di organi fisicamente disposti
in cascata con il processo.
x
+
_
a
G1
m
G2
y
Fig.1
Impostato il problema in questi termini, l’unica limitazione dello schema in
figura è quella di lasciare a disposizione del progettista una sola funzione di
trasferimento (schema ad un solo grado di libertà), mentre si può ricorrere a
schemi più complessi in cui il progettista può scegliere indipendentemente più di
una funzione di trasferimento per riuscire a soddisfare specifiche sui diversi
aspetti e proprietà del sistema di controllo (schemi a due o più gradi di libertà).
⇒ La disposizione e la natura degli organi di correzione determinano allora solo
i vincoli sulla forma della funzione G1 . Così ad esempio, se si pensa che l’azione
di controllo debba essere svolta da un amplificatore e da reti passive RC in
cascata tra loro e con il processo, ne conseguono dei vincoli sui poli della G1 che
in questo caso devono essere semplici, reali, negativi, non nell’origine ne
all’infinito.
Se invece si scelgono organi di correzione diversi e disposti diversamente i
vincoli devono essere scelti in rapporto alla situazione effettiva, mentre il
problema di sintesi può essere impostato sempre in termini di determinazione
della G1 equivalente secondo lo schema standard in Fig.1.
3
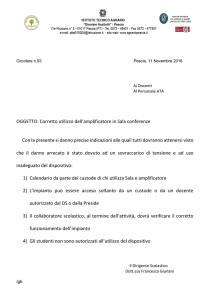
Consideriamo, per illustrare con un esempio concreto il concetto di funzione di
correzione equivalente, un sistema di asservimento della posizione dell’asse di un
servomotore elettrico in c.c. a controllo d’armatura. La realizzazione pratica di
tale sistema viene usualmente eseguita secondo lo schema in Fig.2:
X
+
+
_
A
_
M
Y
D
Fig.2
Con riferimento allo schema standard di Fig.1 il processo da controllare (blocco
G2) è il servomotore M. Il blocco D è una dinamo tachimetrica e il blocco A è un
amplificatore.
Il servomotore ha funzione di trasferimento:
M ( s ) = G2 ( s ) =
k2
s(1 + τ 2 s)
(1)
La dinamo tachimetrica è una piccola dinamo in cui la tensione in uscita v(t) è
proporzionale alla velocità del motore:
v(t ) = hθ&(t )
e trasformando
V ( s ) = hsΘ( s ) .
secondo Laplace
La funzione di trasferimento tra ingresso posizione e uscita tensione è quindi:
D( s ) =
V (s)
= hs
Θ( s )
(2)
L’amplificatore A può essere considerato ideale caratterizzato dal guadagno KA.
Per riportarci allo schema standard si tratta di individuare la funzione di
trasferimento del blocco di correzione G1eq (funzione di correzione equivalente).
Esprimendo la f. di t. dell’anello interno con la solita regola, si ottiene la f. di t.
della catena diretta:
A( s)
M ( s)
G2 ( s)
= KA
= G1eq ( s)G2 ( s)
1 + D( s ) M ( s )
1 + hsG2 ( s)
(3)
e quindi la funzione di correzione equivalente secondo lo schema a blocchi
standard di Fig.1 è:
4
G1eq ( s ) =
KA
=
1 + hsG2 ( s )
KA
1 + hs
k2
s (1 + τ 2 s )
=
KA
1 + hk 2
(1 + τ 2 s )
(1 +
τ2
1 + hk 2
s)
(4)
La (4) è chiaramente rappresentativa di un’azione anticipatrice, cioè lo schema
di controllo con la dinamo tachimetrica e l’amplificatore come in Fig.2 è
equivalente, da un punto di vista funzionale, a quello di Fig.1 in cui si realizza la
rete di correzione con una rete anticipatrice passiva RC e un amplificatore di
guadagno KA in cascata tra loro.
⇒ Impostato il problema secondo questa prospettiva, i metodi che verranno
esposti per la scelta della funzione di correzione equivalente in cascata sono gli
stessi utilizzati per la scelta della G1 in uno schema del tipo di Fig.1, purché la
G1eq che si deduce sia effettivamente realizzabile. Scelta dunque la G1eq in base
alle specifiche, si tratterà poi di passare ai parametri che caratterizzano gli
organi di correzione effettivi (nel caso in esempio la G1eq può essere realizzata
anche con amplificatori e reti RC in cascata, ma se G2 fosse diversa ciò potrebbe
anche non avvenire).
E’ molto importante notare che nel caso concreto considerato non sono a
disposizione del progettista entrambi i parametri ma e τa , come nel caso di rete
passiva in cascata, ma solo ma=1+hk2 , in quanto τa=τ2 è la costante di tempo del
processo (servomotore). In particolare nel caso in esame si tratta di scegliere
KAed h.
Il sistema all’esame ha un’altro aspetto di particolare interesse da evidenziare,
con riferimento alla G1eq ottenuta: la f. di t. della catena diretta dello schema
equivalente di Fig.1 è:
G1eq ( s )G2 ( s ) =
KA
1 + hk 2
(1 + τ 2 s )
(1 +
τ2
1 + hk 2
s)
k2
s (1 + τ 2 s )
(5)
Nella (5) il termine (1+τ2s) a numeratore di G1eq è lo stesso che compare nel
denominatore di G2 , il che determina una cancellazione perfetta zero-polo.
Si è così ottenuto nella catena diretta un sistema con costante di tempo non più
τ2 ma:
τ2
1 + hk 2
< τ 2 . Se avessimo usato un solo amplificatore in cascata col
processo G2 avremmo avuto un sistema a ciclo aperto con un certo guadagno, un
polo nell’origine e una costante di tempo τ2 . La riduzione della costante di
tempo ottenuta col ricorso alla soluzione con dinamo tachimetrica è a favore
della stabilità (minore sfasamento in ritardo in corrispondenza di ωt ) e della
prontezza di risposta (a parità di guadagno dell’amplificatore, nel caso con
dinamo tachimetrica la ωt è maggiore e cioè è maggiore la banda passante a ciclo
chiuso). Chiaramente tali effetti sono quelli tipici di un’azione anticipatrice,
come evidenziato dalla forma della G1eq.
5